國
立
交
通
大
學
統計學研究所
碩
士
論
文
A PROCESS MONITORING TECHNIQUE FOR
CATEGORICAL DATA USING
A PARAMETRIC TWO-COMPONENTS MIXTURE
PRIOR FAMILY
研 究 生 : 余家慧
類別資料混合先驗分配之經驗貝氏製程
監控技術
A PROCESS MONITORING TECHNIQUE FOR
CATEGORICAL DATA USING
A PARAMETRIC TWO-COMPONENTS MIXTURE
PRIOR FAMILY
研 究 生 :余家慧 Student:Chia-Hui Yu
指導教授 : 陳志榮 博士 Advisor: Dr. Chih-Rung Chen
國 立 交 通 大 學
統計學研究所
碩 士 論 文
A Thesis
Submitted to Institute of Statistics
College of Science
Nation Chiao Tung University
in partial Fulfillment of the Requirements
for the degree of Master
in
Statistics
June 2006
Hsinchu, Taiwan
類別資料混合先驗分配之經驗貝氏製程
監控技術
研究生:余家慧 指導教授:陳志榮 教授
國立交通大學統計學研究所
摘 要
在此篇論文中,首先對在製程控制下的先驗分配提出一個由兩個
成份組成的混合先驗有母數族。然後在可以得到製程控制下所產
生的某些類別資料時,提出一個經驗貝氏的方法。接著提出一個
例子來解釋此經驗貝氏模型。為了建構模型,我們討論此經驗貝
氏模型之配適度和簡化。利用概似比的方法,提出貝氏和經驗貝
氏製程監控技術來作為本篇論文的主要目的。最後藉由平均連串
長度來研究此製程監控技術的表現。
關鍵字: 經驗貝氏; 製程監控; 類別資料; 混合先驗; beta-二項
式; Dirichlet-多項式; 變換-常態-二項式; 變換-常態-多項式;
管制圖; 品質管制
A PROCESS MONITORING TECHNIQUE FOR
CATEGORICAL DATA
USING A TWO-COMPONENTS MIXTURE PRIOR
PARAMETRIC FAMILY
Student : Chia-Hui Yu Advisor : Dr. Chih-Rung Chen
Institute of Statistics
National Chiao Tung University
Abstract
In the paper, first, a two-components mixture prior parametric family for
the in-control prior distribution is proposed in a manufacturing process.
Then an empirical Bayes approach is proposed when there are available
in-control categorical data generated from the manufacturing process. As
an illustration, an example of the proposed empirical Bayes model is
introduced. For the purpose of model building, the goodness of fit and the
simplification of the proposed model are discussed. Utilizing the
likelihood ratio method, both Bayesian and empirical Bayes monitoring
techniques are proposed as the main purpose of the paper. Finally, the
performance of the proposed process monitoring scheme is studied in terms
of the average run length to show the robustness of the methodology.
Key words: Empirical Bayes; Process monitoring; Categorical data; Mixture
prior; Beta-binomial; Dirichlet-multinomial; Transformed-normal-binomial;
Transformed-normal-multinomial; Control chart; Quality control
誌謝
在交大統計學研究所兩年的日子裡,很感謝陪著我一路走來
的師長與同學。非常感謝所上老師們的教導,以及同學們在學業
上所給予我的協助,使我在研究所的生活既豐富又充實.很感謝
我的指導教授陳志榮老師,指引我探索論文相關領域並且指導我
完成論文.也很感謝口試委員許文郁老師,洪志真老師,黃榮臣
老師對於我的論文所提供寶貴的指導與建議。
生活上也很感激我的家人和朋友們在精神上的支持與鼓勵,
使我能順利的完成學業。謹以此論文給我的家人、師長、同學和
朋友,表達內心最誠摯的感激!
余家慧 謹誌于
國立交通大學統計學研究所
中華民國九十五年八月
Contents
Abstract in Chinese………...i
Abstract in English………..ii
Acknowledgements………iii
Contents………..………iv
1 INTRODUCTION………..1
2 A TWO-COMPONENTS MIXTURE PARAMETRIC
FAMILY……….5
3 AN EMPIRICAL BAYES APPROACH……..………....10
4 AN EXAMPLE…….……….……...18
4.1 THE FIRST COMPONENT PRIOR PARAMETRIC
FAMILY………18
4.2 THE SECOND COMPONENT PRIOR
PARAMETRIC FAMILY...20
5 GOODNESS OF FIT………24
6 SIMPLICATION…..………...………..27
7 A PROCESS MONITORING SCHEME………..30
7.2 AN EMPIRICAL BAYES MONITORING
SCHEME………33
8 AVERAGE RUN LENGTH BEHAVIOR………36
8.1 A BAYESIAN APPROACH……….37
8.2 AN EMPIRICAL BAYES APPROACH…………..39
9 CONCLUSIONS AND FUTHURE WORK………43
Appendix………44
Reference………...45
1
INTRODUCTIONIn a manufacturing process, suppose that a product has k possible types of defects for some known positive integer k. For each tested product item, the result could be recorded as exactly one of the following k + 1 disjoint categories: fthe …rst defect type, : : :, the kth defect type, passg. Such data are called either binary for k = 1 or polytomous for k 2. In the paper, categorical data denote either binary or polytomous data. See, e.g., McCullagh and Nelder (1989, Chapters 4 and 5) or Agresti (2002) for a review of the categorical data analysis.
In a Bayesian framework, the prior distribution of the unobserved random parameters is pre-speci…ed explicitly, i.e., it does not depend on the observed data. However, it is usually a non-trivial task for practitioners to pre-specify an appropriate prior distribution of the random parameters. Thus, an empirical Bayes approach is commonly used instead.
In an empirical Bayes framework, there exist some unknown hyperparameters in the prior distribution of the unobserved random parameters. Then the marginal distribution of the observed data is utilized to estimate the hyperparameters. Fi-nally, a Bayesian inference is made for the random parameters by treating the estimated prior distribution as the prior distribution. Since the estimated prior distribution does depend on the observed data, an empirical Bayes inference is not a Bayesian inference.
There are some research works utilizing the empirical Bayes model to monitor the categorical data generated in a manufacturing process. For example, Yousry et al. (1991) used the beta-binomial empirical Bayes model to monitor the binary data and utilized the method of moments for estimation of the
hyperparame-ters. Recently, Shiau et al. (2005) used the Dirichlet-multinomial empirical Bayes model to monitor the polytomous data and utilized both the pseudo maximum likelihood method and the method of moments for estimation of the hyperparame-ters. Chen et al. (2004) used the beta-binomial/Dirichlet-multinomial empirical Bayes model to monitor the categorical data and utilized the maximum likelihood method for estimation of the hyperparameters. Similarly, Chen et al. (2005) used the transformed-normal-binomial/multinomial empirical Bayes model to monitor the categorical data and utilized the maximum likelihood method for estimation of the hyperparameters. Chen and Liu (2005) developed a model selection technique between two empirical Bayes models for the categorical data.
To proceed the discussion, we give a brief description on the Bayesian inference as follows: In a Bayesian framework, the prior distribution of the unobserved ran-dom parameter vector has an explicitly pre-speci…ed prior probability density function (p.d.f.) or probability mass function (p.m.f.) ( ) and that the response vector y given has a known conditional p.d.f. or p.m.f. f (yj ), where the
func-tion ( ) does not depend on y. Then the Bayesian inference is based on the
posterior p.d.f. or p.m.f. p( jy) of given y, where
p( jy) / f(yj ) ( ):
In the Bayesian terminology, ( ), f (yj ), and p( jy) are also called the prior likelihood, the likelihood, and the posterior likelihood of , respectively. In the literature, it is common practice to estimate by the posterior mean E( jy) of
given y, where E( jy) = R f (yj ) ( ) d R f (yj ) ( ) d or P 2 f (yj ) ( ) P 2 f (yj ) ( )
with P (f 2 g) = 1. An alternative estimator of is the posterior mode
mode( jy) of given y, where
mode( jy) = arg sup
2
p( jy) = arg sup
2
f (yj ) ( ):
See, e.g., Gelman et al. (2004) for a review of the Bayesian data analysis.
Next, we give a brief description on the empirical Bayes inference as follows: In an empirical Bayes framework, the unobserved random parameter vector has
a prior p.d.f. or p.m.f. ( ; ) for some unknown hyperparameter vector and
that the response vector y given has a known conditional p.d.f. or p.m.f. f (yj ). An empirical Bayes inference is simply a Bayesian inference discussed above with ( ) being replaced by ( ; )j = ^ (y) ( ( ; ^(y))), where ^(y) is an estimator of . Then an empirical Bayes inference is based on the estimated posterior p.d.f. or p.m.f. p( jy; )j = ^ (y) ( p( jy; ^(y))) of given y, where
p( jy; ) / f(yj ) ( ; ):
In practice, either the maximum likelihood estimator or a method-of-moments estimator of is usually used as ^(y) in an empirical Bayes inference. Similarly, it is common practice to estimate by the estimated posterior mean E( jy; )j = ^ (y)
( E( jy; ^(y))) of given y, where E( jy; ) = R f (yj ) ( ; ) d R f (yj ) ( ; ) d or P 2 f (yj ) ( ; ) P 2 f (yj ) ( ; )
with P (f 2 g; ) = 1. An alternative estimator of is the estimated posterior
mode mode( jy; )j = ^(y) ( mode( jy; ^(y))) of given y, where
mode( jy; ) = arg sup
2
p( jy; ) = arg sup
2
f (yj ) ( ; ):
See, e.g., Carlin and Louis (2000) for a review of the empirical Bayes data analysis. The remaining parts of the paper is organized as follows. In Section 2, a two-components mixture prior parametric family for the in-control prior distribution is proposed in a manufacturing process. In Section 3, an empirical Bayes approach is proposed when there are available in-control categorical data generated from the manufacturing process. An example of the proposed empirical Bayes model is introduced in Section 4. The goodness of …t and the simpli…cation of the proposed model are discussed in Sections 5 and 6, respectively. Utilizing the likelihood ratio method, both Bayesian and empirical Bayes monitoring techniques are proposed in Section 7. The performance of the proposed process monitoring scheme is studied in terms of the average run length in Section 8. Some concluding remarks are given in the …nal section.
2
A TWO-COMPONENTS MIXTURE PRIOR PARAMETRIC FAMILYAssume that a product item is classi…ed as one of the following k + 1 disjoint categories: fthe …rst defect type, : : :, the kth defect type, passg, where k is a known positive integer. Let t be any positive integer. For i 2 f1; : : : ; kg, let it denote the probability that a product item manufactured at time t has the ith defect type. Then 1 Pki=1 it ( k+1;t) is the probability that a product item manufactured at time t passes the test. Set t ( 1t; : : : ; kt)T and f t: 1t; : : : ; kt > 0 and Pki=1 it < 1g. In the paper, t is called the (unobserved) random parameter vector at time t. Let F t denote the prior cumulative
distrib-ution function (c.d.f.) of t. For simplicity of notation, set Rm ( 1; 1)m for any positive integer m.
Throughout the paper, the manufacturing process is said to be in control at time t if and only if F t = F, where F is an unknown in-control prior c.d.f. on
with p.d.f. ( t). In other words, the manufacturing process is said to be out of control at time t if and only if F t 6= F .
For u 2 f1; 2g, let fFu; u: u 2 ug denote the uth component prior
para-metric family, where u is a qu 1 hyperparameter vector for some known pos-itive integer qu, each Fu; u is a known prior c.d.f. on with p.d.f. u( t; u),
and u is a known open subset of Rqu. Assume that @2 u( t; u)=@ u@ Tu
ex-ists for each t 2 , u 2 u, and u 2 f1; 2g. Let fF : 2 g denote the
two-components mixture prior parametric family, where ( (!; T1; T2)T) is a
c.d.f. on with p.d.f. ( t; ) exp(!) 1 + exp(!) 1( t; 1) + 1 1 + exp(!) 2( t; 2); (1)
and [ 1; 1] 1 2. Assume that the two-components mixture prior
parametric family is identi…able, i.e., F 1 6= F 2 if 1 6= 2 with 1; 2 2 .
When ! = 1, the two-components mixture prior parametric family is simpli…ed to the …rst component prior parametric family with ( t; ) = 1( t; 1). When ! = 1, the two-components mixture prior parametric family is simpli…ed to the second component prior parametric family with ( t; ) = 2( t; 2). See, e.g., McLachlan and Peel (2000).
For any 2 , the Kullback-Leibler divergence between the in-control prior c.d.f. F and the prior c.d.f. F is de…ned as
d(F; F )
Z
log ( t)
( t; )
dF ( t) d( ): (2)
By the Jensen inequality,
d( ) = Z log ( t; ) ( t) dF ( t) log Z ( t; ) ( t) ( t) d t = log Z f t: ( t)>0g ( t; ) d t log Z ( t; ) d t = 0
for 2 , where d( ) = 0 if and only if F = F .
( o), @2d( )=@ @ T exists, @d( ) @ = Z @ @ log ( t) ( t; ) dF ( t) S( ); and @2d( ) @ @ T = Z @2 @ @ T log ( t) ( t; ) dF ( t) J ( ):
Assume that there exists a unique 0 2 o such that
0 = arg inf
2 d( ): (3)
Then S( 0) = 0q 1. Observe that, for 2 o,
S( ) = Z @ ( t; )=@ ( t; ) dF ( t) Z ( t; ) ( t; ) dF ( t) Z S( ; t) dF ( t) E(S( ; t); F ) (4) and J ( ) = Z @S( ; t) @ T dF ( t) = Z @2 ( t; )=@ @ T ( t; ) + ( t; ) T( t; ) [ ( t; )]2 dF ( t) Z T( t; ) ( t; ) + ( t; ) T( t; ) [ ( t; )]2 dF ( t) Z J ( ; t) dF ( t) E(J ( ; t); F ): (5)
For 2 o, set K( ) Z S( ; t) ST( ; t) dF ( t) = Z ( t; ) T( t; ) [ ( t; )]2 dF ( t) Z K( ; t) dF ( t) E(K( ; t); F ): (6)
Then K( ) is a positive de…nite covariance matrix for 2 o. For
u 2 uand u 2 f1; 2g, set u; u( t; u) @ u( t; u)=@ u and u; u Tu( t; u) @
2
u( t; u)=
@ u@ Tu.
Observe that, for 2 o,
@ ( t; ) @! = exp(!) [1 + exp(!)]2 [ 1( t; 1) 2( t; 2)] !( t; ); @ ( t; ) @ 1 = exp(!) 1 + exp(!) 1; 1( t; 1) 1( t; ); @ ( t; ) @ 2 = 1 1 + exp(!) 2; 2( t; 2) 2( t; ); @2 ( t; ) @!2 = exp(!) [1 exp(!)] [1 + exp(!)]3 [ 1( t; 1) 2( t; 2)] !!( t; ); @2 ( t; ) @ 1@ T1 = exp(!) 1 + exp(!) 1; 1 T1( t; 1) 1 T1( t; ); @2 ( t; ) @ 2@ T2 = 1 1 + exp(!) 2; 2 T2( t; 2) 2 T2( t; ); @2 ( t; ) @!@ T1 = exp(!) [1 + exp(!)]2 T 1; 1( t; 1) ! T1( t; ); @2 ( t; ) @!@ T2 = exp(!) [1 + exp(!)]2 T 2; 2( t; 2) ! T2( t; ); and @2 ( t; ) @ 1@ T2 = 0q1 q2 1 T2( t; );
One way to evaluate 0 is to iterate the following procedure until (v)converges to 0: First choose a good initial value (0) 2 o for 0. Next, set
(v+1) (v) + J 1 (v) S (v) (7)
when (v) is de…ned for v 2 f0; 1; 2; : : :g. If (v+1) 2 o and d( (v+1)) d( (v)),
set (v+1) (v+1); otherwise, set
(u;v+1) (v)+ 1
2u K
1 (v) S (v) (8)
for u 2 f0; 1; 2; : : :g and set (v+1) (mv+1;v+1), where m
v+1 minfu: u 2
f0; 1; 2; : : :g, (u;v+1) 2 o, (u+1;v+1) 2 o, and d( (u;v+1)) < minfd( (v)),
d( (u+1;v+1))gg.
Note that, by the Taylor series expansion, we obtain
d (u;v+1) = d (v) ST (v) (u;v+1) (v) +
= d (v) 1
2u S
T (v) K 1 (v) S (v) + O 1
22 u
as u ! 1 for any …xed non-negative integer v. Since ST( (v))K 1( (v))S( (v)) > 0for any …xed non-negative integer v, d( (u;v+1))is a strictly increasing function of u for large u with limit d( (v)), which implies that mv+1 is well-de…ned. Thus, d( (v)) is a decreasing function of v, i.e., d( (0)) d( (1)) d( (2)) : : :.
When any of d( ), S( ), J ( ), and K( ) does not have a closed-form formula, we may …rst simulate an independent and identically distributed (i.i.d.) sample f (1)t ; : : : ;
(R)
then numerically evaluate d( ), S( ), J ( ), and K( ) by ^ d( ) 1 R R X r=1 log ( t) ( t; ) t= (r) t ; (9) ^ S( ) 1 R R X r=1 ( t; ) ( t; ) t= (r) t ; (10) ^ J ( ) 1 R R X r=1 T( t; ) ( t; ) + ( t; ) T( t; ) [ ( t; )]2 t= (r)t ; (11) and ^ K( ) 1 R R X r=1 ( t; ) T( t; ) [ ( t; )]2 t= (r) t ; (12) respectively.
3
AN EMPIRICAL BAYES APPROACHLet t be any positive integer. Suppose that there are nt tested product items manufactured at time t, where nt is a known positive integer. For i 2 f1; : : : ; kg, let yitdenote the number of the tested product items which have the ith defect type among the nt tested product items manufactured at time t. Then nt
Pk
i=1 yit
( yk+1;t) is the number of the tested product items which pass the test among
the nt tested product items manufactured at time t. Set yt (y1t; : : : ; ykt)T and Ynt fyt: y1t; : : : ; ykt 2 f0; 1; : : : ; ntg and
Pk
i=1 yit ntg. In the paper, yt is called the (observed) response vector at time t.
At each time t, assume that the response vector ytgiven the random parameter vector t is distributed as either the conditional binomial(nt; t) distribution for k = 1 or the conditional multinomial(nt; t) distribution for k 2, denoted by
ytj t binomial(nt; t) for k = 1 or multinomial(nt; t) for k 2. Let Fytj t
denote the conditional c.d.f. of yt given t with p.m.f.
f (ytj t) = 1Ynt(yt) nt! Qk+1 i=1 yit! k+1 Y i=1 yit it ; (13)
where 1Ynt(yt) = 1 for yt 2 Ynt and 0 otherwise. Let Fyt denote the marginal
c.d.f. of yt with p.m.f. f (yt; F t) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z k+1Y i=1 yit it dF t( t): (14)
For u 2 u and u 2 f1; 2g, let Fyt;u; u denote the marginal c.d.f. of yt with
p.m.f. fu(yt; u) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z k+1Y i=1 yit it dFu; u( t) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z k+1Y i=1 yit it ! u( t; u) d t (15)
when t is distributed as the prior c.d.f. Fu; u, denoted by t Fu; u and yt
Fyt;u; u. For 2 , let Fyt; denote the marginal c.d.f. of yt with p.m.f.
f (yt; ) =
exp(!)
1 + exp(!) f1(yt; 1) +
1
1 + exp(!) f2(yt; 2) (16)
For u 2 u and u 2 f1; 2g, assume that @fu(yt; u) @ u = 1Ynt(yt) nt! Qk+1 i=1 yit! Z @ @ u " k+1 Y i=1 yit it ! u( t; u) # d t fu; u(yt; u) and @2f u(yt; u) @ u@ Tu = 1Ynt(yt) nt! Qk+1 i=1 yit! Z @2 @ u@ Tu " k+1 Y i=1 yit it ! u( t; u) # d t fu; u T u(yt; u):
Then, for u 2 u and u 2 f1; 2g,
fu; u(yt; u) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z k+1Y i=1 yit it ! u; u( t; u) u( t; u) dFu; u( t) (17) and fu; u T u(yt; u) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z k+1Y i=1 yit it ! u; u Tu( t; u) u( t; u) dFu; u( t): (18) In the paper, it is assumed that the in-control prior c.d.f. F = F 0 for some
unique 0 2 . Then d( 0) = 0. Assume that there are available historical in-control response vectors fy1; y2; : : : ; yTg generated in the manufacturing process for some known large positive integer T , where ( T1; yT1)T; (
T
2; yT2)T; : : : ; ( T
T; yTT)
T
are independent 2k 1 random vectors. Set ( T1; T2; : : : ; TT)T, y (yT1; yT2; : : :, yTT)T
, and Y Yn1 Yn2 YnT, where and y are, respectively, called the
(ob-served) response vector in the paper. Let Fy; 0 denote the marginal c.d.f. of y with p.m.f. f y; 0 = T Y t=1 f yt; 0 : (19)
Given the historical in-control response vector y, the log-likelihood function
for is
`( ; y) log[f (y; )] log
" T Y t=1 f (yt; ) # = T X t=1 log exp(!) 1 + exp(!) f1(yt; 1) + 1 1 + exp(!) f2(yt; 2) T X t=1 log exp(!) 1 + exp(!) exp[`1( 1; yt)] + 1 1 + exp(!) exp[`2( 2; yt)] T X t=1 `( ; yt); (20)
the score function for is
S( ; y) @`( ; y) @ = T X t=1 @`( ; yt) @ = T X t=1 @f (yt; )=@ f (yt; ) T X t=1 f (yt; ) f (yt; ) T X t=1 S( ; yt); (21)
and the observed (Fisher) information for is J ( ; y) @S( ; y) @ T = T X t=1 @S( ; yt) @ T = T X t=1 f (yt; ) fT(yt; ) [f (yt; )]2 @2f (yt; )=@ @ T f (yt; ) T X t=1 f (yt; ) fT(yt; ) [f (yt; )]2 f T(yt; ) f (yt; ) T X t=1 J ( ; yt): (22) For 2 o, set K( ; y) T X t=1 S( ; yt) ST( ; yt) = T X t=1 f (yt; ) f T(yt; ) [f (yt; )]2 T X t=1 K( ; yt): (23)
Then K( ; y) is a non-negative de…nite covariance matrix for 2 o and y 2 Y. For large T , K( ; y) is in general a positive de…nite covariance matrix for 2 o and y 2 Y.
Observe that, for 2 o, @f (yt; ) @! = exp(!) [1 + exp(!)]2 [f1(yt; 1) f2(yt; 2)] f!(yt; ); @f (yt; ) @ 1 = exp(!) 1 + exp(!) f1; 1(yt; 1) f 1(yt; ); @f (yt; ) @ 2 = 1 1 + exp(!) f2; 2(yt; 2) f 2(yt; ); @2f (y t; ) @!2 = exp(!) [1 exp(!)] [1 + exp(!)]3 [f1(yt; 1) f2(yt; 2)] f!!(yt; ); @2f (y t; ) @ 1@ T1 = exp(!) 1 + exp(!) f1; 1 T1(yt; 1) f 1 T1(yt; ); @2f (y t; ) @ 2@ T2 = 1 1 + exp(!) f2; 2 T2(yt; 2) f 2 T2(yt; ); @2f (y t; ) @!@ T1 = exp(!) [1 + exp(!)]2 f T 1; 1(yt; 1) f! T1(yt; ); @2f (y t; ) @!@ T2 = exp(!) [1 + exp(!)]2 f T 2; 2(yt; 2) f! T2(yt; ); and @2f (yt; ) @ 1@ T2 = 0q1 q2 f 1 T2(yt; ):
The maximum likelihood estimator (MLE) ^(y) ( ^) of solves the score
equation S( ; y) = 0q 1 for . That is, S( ; y)j = ^ ( S(^; y)) = 0q 1.
One way to evaluate ^ is to iterate the following procedure until (v) converges to ^: First choose a good initial value (0) 2 o for ^. Next, set
(v+1) (v)
+ J 1 (v); y S (v); y (24)
`( (v); y), set (v+1) (v+1); otherwise, set
(u;v+1) (v)+ 1
2u K
1 (v); y S (v); y (25)
for u 2 f0; 1; 2; : : :g and set (v+1) (mv+1;v+1), where m
v+1 minfu: u 2
f0; 1; 2; : : :g, (u;v+1) 2 o, (u+1;v+1) 2 o, and `( (u;v+1); y) < minf`( (v); y),
`( (u+1;v+1); y)gg.
Note that, by the Taylor series expansion, we obtain
` (u;v+1); y = ` (v); y + ST (v); y (u;v+1) (v) + = ` (v); y + 1 2u S T (v); y K 1 (v); y S (v); y + O 1 22 u
as u ! 1 for any non-negative integer v. Since ST( (v); y)K 1( (v); y)S( (v); y) > 0for any …xed non-negative integer v, `( (u;v+1); y)is a strictly decreasing function of u for large u with limit `( (v); y), which implies that mv+1is well-de…ned. Thus, `( (v); y) is an increasing function of v, i.e., `( (0); y) `( (1); y) `( (2); y) : : :.
When any of `( ; y), S( ; y), J ( ; y), and K( ; y) does not have a closed-form closed-formula, we may numerically evaluate any of them as follows: First, for u2 f1; 2g, simulate an i.i.d. sample f (u;1)1 ; : : : ; (u;R)1 g of size R, e.g., R = 50 000, from the prior c.d.f. Fu; u. Secondly, for u 2 f1; 2g, numerically evaluate fu(yt; u),
fu; u(yt; u), and fu; u Tu(yt; u) by ^ fu(yt; u) 1Ynt(yt) nt! Qk+1 i=1 yit! 1 R R X r=1 k+1Y i=1 yit it ! = (u;r) ; (26)
^ fu; u(yt; u) 1Ynt(yt) nt! Qk+1 i=1 yit! 1 R R X r=1 " k+1 Y i=1 yit it ! u; u( t; u) u( t; u) # t= (u;r)1 ;(27) and ^ fu; u T u(yt; u) 1Ynt(yt) nt! Qk+1 i=1 yit! 1 R R X r=1 " k+1 Y i=1 yit it ! u; u Tu( t; u) u( t; u) # t= (u;r)1 ;(28)
respectively. As all of f (yt; ), f (yt; ), and f T(yt; ) have closed-form
for-mulae of !, fu(yt; u), fu; u(yt; u), and fu; u Tu(yt; u) for u 2 f1; 2g, thirdly,
numerically evaluate f (yt; ), f (yt; ), and f T(yt; ) by ^f (yt; ), ^f (yt; ),
and ^f T(yt; ), respectively, utilizing their closed-form formulae. Finally,
numer-ically evaluate `( ; y), S( ; y), J ( ; y), and K( ; y) by
^ `( ; y) T X t=1 loghf (y^ t; ) i ; (29) ^ S( ; y) = T X t=1 ^ f (yt; ) ^ f (yt; ) ; (30) ^ J ( ; y) = T X t=1 ( ^ f (yt; ) ^fT(yt; ) [ ^f (yt; )]2 ^ f T(yt; ) ^ f (yt; ) ) ; (31) and ^ K( ; y) = T X t=1 ^ f (yt; ) ^fT(yt; ) [ ^f (yt; )]2 ; (32) respectively.
4
AN EXAMPLEFor illustration of the proposed methodology, the …rst component prior para-metric family is chosen as the family of all beta/Dirichlet distributions because it is a conjugate family of binomial/multinomial distributions. The second com-ponent prior parametric family is chosen as the family of all transformed normal distributions (de…ned below) because it is a rich family of distributions, o¤ering important distribution shapes that cannot be achieved within the family of all beta/Dirichlet distributions. See, e.g., O’Hagan and Forster (2004, Chapter 12).
4.1
The First Component Prior Parametric FamilyLet the …rst component prior parametric family fF1; 1: 1 2 1g denote
the family of all beta/Dirichlet distributions, where 1 ( 11; : : : 1;k+1)T ( ( 11; : : : 1q1) T), 1 Rk+1, and F1; 1 has p.d.f. 1( t; 1) = 1 ( t) [Pk+1i=1 exp( 1i)] Qk+1 i=1 [exp( 1i)] k+1 Y i=1 exp( 1i) 1 it 1 ( t) [exp( 10)] Qk+1 i=1 [exp( 1i)] k+1 Y i=1 exp( 1i) 1 it (33)
with 1 ( t) = 1 for t 2 and 0 otherwise. Since fF1; 1: 1 2 1g is
cho-sen as a conjugate family of binomial/multinomial distributions, all of f1(yt; 1), f1; 1(yt; 1), and f1; 1 1T(yt; 1) have closed-form formulae for 1 2 1 as follows:
For 1 2 1, it follows from Johnson et al. (1997, pages 80 and 81) that f1(yt; 1) = 1Ynt(yt) exp (nt 1 X j=0 log j + 1 exp( 10) + j k+1 X i=1 yXit 1 j=0 log j + 1 exp( 1i) + j ) : (34)
For 1 2 1, set exp( 1) (exp( 11); : : : ; exp( 1;k+1))T. Then, for 1 2 1 and yt2 Ynt, we have S1( 1; yt) @ @ 1 `1( 1; yt) = f1; 1(yt; 1) f1(yt; 1) = yX1t 1 j=0 exp( 11) exp( 11) + j ; : : : ; yk+1;tX 1 j=0 exp( 1;k+1) exp( 1;k+1) + j !T "nt 1 X j=0 1 exp( 10) + j # exp( 1) and J1( 1; yt) @ @ T1 S1( 1; yt) = S1( 1; yt) S T 1( 1; yt) f1; 1 T 1(yt; 1) f1(yt; 1) = diag (y1t 1 X j=0 j exp( 11) [exp( 11) + j] 2; : : : ; yk+1;tX 1 j=0 j exp( 1;k+1) [exp( 1;k+1) + j] 2 ) + "nt 1 X j=0 1 exp( 10) + j #
diagfexp ( 11) ; : : : ; exp( 1;k+1)g (nt 1 X j=0 1 [exp( 10) + j]2 ) exp( 1) exp( 1)T:
Thus, for yt2 Ynt and 1 2 1, f1; 1(yt; 1) = f1(yt; 1) S1( 1; yt) (35) and f1; 1 T1(yt; 1) = f1(yt; 1) S1( 1; yt) S T 1( 1; yt) J1( 1; yt) : (36)
4.2
The Second Component Prior Parametric FamilyLet the second component prior parametric family fF2; 2: 2 2 2g
de-note the family of all transformed normal distributions de…ned as follows: Set (log( 1t= k+1;t); : : : ; log( kt= k+1;t))T t( ( 1t; : : : ; kt)T). Then, for i 2 f1; : : :, kg, it = exp( it)=[1 +
Pk
i0=1 exp( i0t)]. Let N ( ; ) denote the k-variate normal distribution with mean vector ( ( 1; : : : ; k)T
) 2 Rk and k k positive def-inite covariance matrix ( ( ii0)). Set 1 ( ii0) and R ( ii0=
p ii i0i0 ) ( ( ii0)). Then
1 = diagnp 11; : : : ;p kkoRdiagnp 11; : : : ;p kko:
Set
2 T; log 11 ; : : : ; log kk ; log
1 + 12 1 12 ; : : : ; log 1 + 1k 1 1k ; : : : ; log 1 + k 1;k 1 k 1;k T ( 21; : : : ; 2;k(k+3)=2)T ( 21; : : : ; 2q2) T 2 2;
where 2 f 2: 2 Rk and is a k k positive de…nite covariance matrixg. Then 2 is an open subset of Rq2. For 2 2 2, let ( ; 2) and 2 denote,
re-spectively, the p.d.f. and the c.d.f. of the N ( ; ) distribution. For 2 2 2,
set @ ( ; 2)=@ 2 2( ; 2) and @2 ( ; 2)=@ 2@ T2 2 T2( ; 2). When
t N ( ; ), we say that t is distributed as the transformed-normal( ; )
distribution, denoted by t F2; 2, with p.d.f.
2( t; 2) = ( t; 2) det @ t @ Tt = 1 ( t) 1 (2 )k=2j j1=2 Qk+1 i=1 it exp 1 2 ( t ) T 1( t ) ;(37) where @ t @ Tt = diag 1 1t ; : : : ; 1 kt + 1 k+1;t 1k 11Tk 1 with 1k 1 denoting the k 1vector (1; : : : ; 1)T.
For 2 2 2, we obtain f2(yt; 2) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z k+1Y i=1 yit it dF2; 2( t) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z Rk exp(yTt t) [1 +Pki=1 exp( it)]nt d 2( t); (38) f2; 2(yt; 2) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z k+1Y i=1 yit it ! 2; 2( t; 2) 2( t; 2) dF2; 2( t) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z Rk exp(yTt t) [1 +Pki=1 exp( it)]nt 2( t; 2) ( t; 2) d 2( t); (39)
and f2; 2 T2(yt; 2) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z k+1Y i=1 yit it ! 2; 2 T2( t; 2) 2( t; 2) dF2; 2( t) = 1Ynt(yt) nt! Qk+1 i=1 yit! Z Rk exp(yT t t) [1 +Pki=1 exp( it)]nt 2 T2( t; 2) ( t; 2) d 2( t): (40)
Note that, for t2 and 2 2 2,
2; 2( t; 2) 2( t; 2) = 2( t; 2) ( t; 2) = 1 2 @ @ 2 ( t )T 1( t ) (41) and 2; 2 T2( t; 2) 2( t; 2) = 2 T2( t; 2) ( t; 2) = 1 2 @2 @ 2@ T2 ( t )T 1( t ) + 2( t; 2) T 2( t; 2) [ ( t; 2)]2 : (42)
Since none of f2(yt; 2), f2; 2(yt; 2), and f2; 2 T2(yt; 2) has a closed-form
formula, we may numerically evaluate all of them as follows: First simulate an i.i.d. sample f (2;1)1 ; : : : ;
(2;R)
1 g of size R, e.g., R = 50 000, from the prior c.d.f. F2; 2
and then numerically evaluate f2(yt; 2), f2; 2(yt; 2), and f2; 2 T2(yt; 2) by
^ f2(yt; 2) 1Ynt(yt) nt! Qk+1 i=1 yit! 1 R R X r=1 k+1 Y i=1 yit it ! t= (2;r)1 ; (43)
^ f2; 2(yt; 2) 1Ynt(yt) nt! Qk+1 i=1 yit! 1 R R X r=1 " k+1 Y i=1 yit it ! 2; 2( t; 2) 2( t; 2) # t= (2;r)1 ; (44) and ^ f2; 2 T 2(yt; 2) 1Ynt(yt) nt! Qk+1 i=1 yit! 1 R R X r=1 " k+1 Y i=1 yit it ! 2; 2 T2( t; 2) 2( t; 2) # t= (2;r)1 ;(45) respectively.
An alternative way to numerically evaluate all of f2(yt; 2), f2; 2(yt; 2), and
f2;
2 T2(yt; 2) is to utilize the multivariate Gauss-Hermite quadrature, e.g., see
Fahrmeir and Tutz (2001, pages 447-449). All of nodes and weights of the Hermite polynomial of 32 degrees are shown in the appendix for the multivariate Gauss-Hermite quadrature.
In the paper, a simulation study is conducted for the following four cases where
F = F 0 = exp(!0) 1 + exp(!0) F1; 01 + 1 1 + exp(!0) F2; 02; k = 1, T = 300, and n1 = : : : = nT = 300 with 0 (!0; 0T1 ; 0T 2 )T ( (!0; 011; 012; 021; 022)T).
Case 1: 0 = (log(1=5); log(85); log(15); 0:716; log[1=(0:214)2])T. In particu-lar, exp(!0)=[1 + exp(!0)] = 1=6, F
1; 01 is the beta(85; 15) distribution, and F2; 02 is
the transformed-normal( 0:716; (0:214)2) distribution.
Case 2: 0 = (log(1); log(80); log(20); 0:410; log[1=(0:205)2])T. In particular, exp(!0)=[1 + exp(!0)] = 1=2, F is the beta(80; 20) distribution,and F is the
transformed-normal( 0:410; (0:205)2) distribution.
Case 3: 0 = (log(1); log(60); log(40); 1:405; log[1=(0:253)2])T. In particular, exp(!0)=[1 + exp(!0)] = 1=2, F1; 01 is the beta(60; 40) distribution, and F2; 02 is the
transformed-normal( 1:405; (0:253)2) distribution.
Case 4: 0 = (log(5); log(73); log(27); 0:203; log[1=(0:202)2])T. In particular, exp(!0)=[1 + exp(!0)] = 5=6, F
1; 01 is the beta(73; 27) distribution, and F2; 02 is the
transformed-normal( 0:203; (0:202)2) distribution.
5
GOODNESS OF FITIn this section, the goodness of …t of the proposed model for a set of available historical in-control response vectors, fy1; : : : ; yTg, generated in a manufacturing process is discussed. Recall that ( T1; : : : ; TT)T, y (yT
1; : : : ; yTT)T, Y Yn1 YnT, and F is the in-control prior c.d.f.
Consider the null hypothesis H0: 1; : : : ; T i:i:d:
F 2 fF : 2 g versus the
alternative H1: 1; : : : ; T i:i:d:
F =2 fF : 2 g. Let F( ) denote the set of all
prior c.d.f.’s on and let `(F ; y) denote the log-likelihood function of F given y. Then `(F ; y) log " T Y t=1 f (yt; F ) # = T X t=1 log[f (yt;F )] T X t=1 `(F ; yt); where f (yt; F ) = Z f (ytj t) dF ( t):
Then WT(y) 2 " sup F 2F( ) `(F ; y) sup 2 `( ; y) # 2 h` F ; y^ ` ^; y i; (46)
where ^F is the non-parametric MLE of F given y under H1 and ^ is the parametric MLE of under H0. Since it takes too much time to calculate the critical point for performing the LR test, an alternative goodness-of-…t test is proposed in the paper as follows:
Note that the empirical prior c.d.f. ~F with p.m.f. T 1 PTt=1 1f tg converges
to F in distribution as T ! 1 and that, for t 2 f1; : : : ; T g, the MLE yt=nt of t given ytconverges to tas nt! 1. Since 1; : : : ; T are unobserved, the empirical prior c.d.f. ~F is unavailable. Thus, we utilize the estimated empirical prior c.d.f. F with p.m.f. T 1 PT
t=1 1fyt=ntg to estimate F . When all of n1; : : : ; nT, and T tend
to 1, F converges to F in distribution.
In the paper, consider the goodness-of-…t statistic
WT(y) 2 h`(F ; y)jF =F ` ^; y i 2 h`(F ; y) ` ^; y i: (47)
One way to calculate the critical point for performing the goodness-of-…t test is as follows: First simulate an i.i.d. sample fy(1); : : : ; y(R)g, e.g., R = 50 000, from the estimated in-control marginal c.d.f. Fy; 0j 0= ^ ( Fy;^). Let (y(1); : : : ; y(R))
be a permutation of (y(1); : : : ; y(R)) such that W
T(y(1)) : : : WT(y(R)). Let be a known constant with 0 < < 1, e.g., 0:05. An approximate size 1 goodness-of-…t test is to reject H0 if and only if WT(y) > WT(y([R (1 )])), where [R (1 )] is the largest integer less than or equal to R (1 ).
The corresponding values of WT(y([R (1 )]))’s for Cases 1-4 in Section 4 are shown in Table 1, where k = 1, T = 300, n1 = : : : = nT = 300, R = 50 000, and = 0:05. And the empirical c.d.f.’s of WT(y)’s for Cases 1-4 in Section 4 are shown in Figures 1, where k = 1, T = 300, n1 = : : : = nT = 300, R = 50 000. Table 1: The values of WT(y([R (1 )]))’s for Cases 1-4, where k = 1, T = 300, n1 = : : : = nT = nt= 300, R = 50 000, and = 0:05.
Case 1 Case 2 Case 3 Case 4
WT(y([R (1 )])) 18.1 4.90 12.7 1.78
Figure 1: The empirical c.d.f.’s of WT’s for Case 1-4, where k = 1, T = 300, n1 = : : : = nT = nt= 300, and R = 50 000. -5.0 0.0 5.0 10.0 15.0 20.0 25.0 W*T 0.0 0.2 0.4 0.6 0.8 1.0 E m p iri ca l c.d .f. Case 1 Case 2 Case 3 Case 4 4.90 0.95 18.1 1.78 12.7
6
SIMPLIFICATIONIn this section, the simpli…cation of the two-components mixture prior para-metric family to either the …rst or the second component prior parapara-metric family is discussed if the null hypothesis of the previous goodness-of-…t test is not rejected.
Let u 2 f1; 2g be …xed. Consider the null hypothesis Hu0: 1; : : : ; T i:i:d:
F 2
fFu; u: u 2 ug versus the alternative Hu1: 1; : : : ; T
i:i:d:
F 2 fF : 2 g.
Let Wu;T(y)denote the LR statistic given y, where
Wu;T(y) 2 " ` ^; y sup u2 u T X t=1 `u( u; yt) # 2 ` ^; y sup u2 u `u( u; y) 2 h ` ^; y `u ^u; y i (48)
with ^udenoting the MLE of ugiven y under the uth component prior parametric family.
One way to calculate the critical point for performing the LR test is as follows: First simulate fy(u;1); : : : ; y(u;R)
g, e.g., R = 50 000, from the estimated in-control marginal c.d.f. Fy;u; 0 uj 0u= ^u ( Fy;u; ^u). Let (y (u) (1); : : : ; y (u) (R)) be a permutation of
(y(u;1); : : :, y(u;R)) such that Wu;T(y(1)(u)) : : : Wu;T(y(u)(R)). Let be a known
constant with 0 < < 1, e.g., 0:05. An approximate size 1 LR test is to reject Hu0 if and only if Wu;T(y) > Wu;T(y
(u)
([R (1 )])), where [R (1 )] is the
largest integer less than or equal to R (1 ).
When both H10 and H20 are rejected, the proposed two-components mixture prior parametric family for the in-control prior distribution is selected. The cor-responding monitoring technique is developed in the following section.
para-metric family for the in-control prior distribution is selected. The corresponding monitoring technique is developed in Chen et al. (2004).
When H10is rejected but H20is not rejected, the second component prior para-metric family for the in-control prior distribution is selected. The corresponding monitoring technique is developed in Chen et al. (2005).
When neither H10 nor H20is rejected, the model selection technique developed in Chen and Liu (2005) can be utilized. The corresponding monitoring technique is developed in either Chen et al. (2004) or Chen et al. (2005).
The corresponding values of Wu;T(y (u)
([R (1 )]))’s for Cases 1-4 in Section 4 are
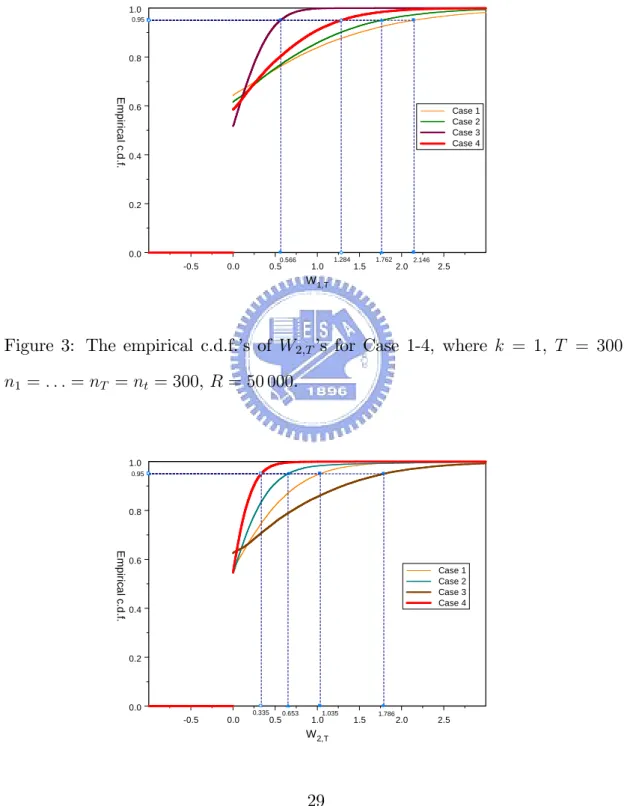
shown in Table 2, where u 2 f1; 2g, k = 1, T = 300, n1 = : : : = nT = 300, R = 50 000, and = 0:05. And the empirical c.d.f.’s of W1;T(y)’s and W2;T(y)’s for Cases 1-4 in Section 4 are shown in Figures 2 and 3, where k = 1, T = 300, n1 = : : : = nT = 300, R = 50 000.
Table 2: The values of Wu;T(y (u)
([R (1 )]))’s for Cases 1-4, where u 2 f1; 2g, k = 1,
T = 300, n1 = : : : = nT = nt = 300, R = 50 000, and = 0:05.
Case 1 Case 2 Case 3 Case 4
W1;T(y (1) ([R (1 )])) 2.146 1.762 0.566 1.284 W2;T(y (2) ([R (1 )])) 1.035 0.653 1.789 0.335
Figure 2: The empirical c.d.f.’s of W1;T’s for Case 1-4, where k = 1, T = 300, n1 = : : : = nT = nt= 300, R = 50 000. -0.5 0.0 0.5 1.0 1.5 2.0 2.5 W1,T 0.0 0.2 0.4 0.6 0.8 1.0 E m p iri ca l c.d .f. Case 1 Case 2 Case 3 Case 4 2.146 1.762 0.566 1.284 0.95
Figure 3: The empirical c.d.f.’s of W2;T’s for Case 1-4, where k = 1, T = 300, n1 = : : : = nT = nt= 300, R = 50 000. -0.5 0.0 0.5 1.0 1.5 2.0 2.5 W2,T 0.0 0.2 0.4 0.6 0.8 1.0 E m p iri ca l c.d .f. Case 1 Case 2 Case 3 Case 4 1.035 0.653 1.786 0.335 0.95
7
A PROCESS MONITORING SCHEMELet Pin denote the false-alarm rate, i.e., the probability that an out-of-control signal occurs when the manufacturing process is in control. Conventionally, Pin is taken to be 2 ( 3) ( 0:002 699 8), where is the c.d.f. of the standard normal distribution. In this section, utilizing the LR method, a Bayesian (or an empirical Bayes) monitoring scheme for the manufacturing process is proposed when F =
F 0 2 fF : 2 g for some known (or unknown) 0 2 . The main reason for
using the LR test is that it often has a higher power than other tests when the alternative hypothesis is true, which corresponds to a better detecting power in monitoring the process when the process is out of control.
In order to monitor the manufacturing process at time t (> T ), suppose that the response vector yt is observed. Then we are interested in testing whether or not the manufacturing process is in control at time t. Recall that F t is the prior
c.d.f. of t and that F( ) is the set of all c.d.f.’s on .
7.1
A BAYESIAN MONITORING SCHEMEIn this subsection, consider the case where F = F 0 2 fF : 2 g for some
known 0 2 . To monitor the manufacturing process at time t, the null hypothesis H0: F t = F 0 versus the alternative H1: F t 6= F 0, i.e., F t 2 F( )nfF 0g, is
tested.
List all the elements of the sample space Ynt of yt by fy
(1)
t ; : : : ; y
(jYntj)
t g, where
jYntj (= (nt+ k)!=(nt!k!)) is the number of elements in Ynt. Regard F t as the
unknown parameter of interest in F( ). Then the unknown parameter of inter-est is non-parametric. Let `(F t; yt) ( log[f (yt; F t)]) denote the log-likelihood
function of F t given yt. Note that `(F t; yt) = log Z f (ytj t) dF t( t) log Z sup t2 f (ytj t) dF t( t) = log Z f (ytj t)j t=yt=nt dF t( t) = log h f (ytj t)j t=yt=nt i ;
where the binomial/multinomial likelihood f (ytj t)for tgiven ytattains its max-imum at t = yt=nt: Thus, the MLE ^F t of F t given yt has p.m.f. 1fyt=ntg and
sup
F t2F( )
`(F t; yt) = `(F t; yt)jF t= ^F t ` F^ t; yt = log f (ytj t)j t=yt=nt :
Let Wt; 0(yt) denote the corresponding LR statistic, where
Wt; 0(yt) = 2 log f (ytj t)j t=yt=nt ` 0; y t (49) with P (f0 < Wt; 0(yt) <1g; Fy t; 0) = 1.
The size PinLR test and a control chart of monitoring the LR statistic Wt; 0(yt)
can be constructed as follows: Let (yt;(1); : : : ; yt;(jYntj))be a permutation of (y
(1) t ; : : :, y(jYt ntj))such that Wt; 0(yt;(1)) : : : Wt; 0(yt;(jYntj)). Note that Wt; 0(yt)is a dis-crete random variable. If a deterministic upper control limit is used, a pre-speci…ed false-alarm rate Pin (2 (0; 1)), e.g., 2 ( 3), is nearly impossible to attain. How-ever, there is no problem to attain any pre-speci…ed false-alarm rate based on the concept of a randomized-upper-control-limit approach proposed in Shiau et al. (2005). To …nd the randomized upper control limit ( RU CL 0), we start
ac-cumulating the right tail probability from Wt; 0(yt;(jY
such that P (fWt; 0(yt) Wt; 0(yt;(r))g; Fy
t; 0) Pin. Denote this r by m 0, i.e.,
m 0 = max r: P Wt; 0(yt) Wt; 0 yt;(r) ; Fy
t; 0 Pin : (50)
If P (fWt; 0(yt) Wt; 0(yt;(m
0))g; Fyt; 0) = Pin, which is nearly impossible, then
there is no need for randomization and Wt; 0(yt;(m
0))is the upper control limit (
U CL 0). If P (fWt; 0(yt) Wt; 0(yt;(m 0))g; Fy
t; 0) > Pin, then Wt; 0(yt;(m 0)) =
RU CL 0. Note that there may be more than one yt;(r) such that Wt; 0(yt;(r)) =
RU CL 0. Let m 0;L, m 0;U 2 f1; : : : ; jYn tjg such that Wt; 0 yt;(m 0;L 1) < Wt; 0 yt;(m 0;L) = RU CL 0 = Wt; 0 yt;(m 0;U) < Wt; 0 yt;(m 0;U+1) ;
where Wt; 0(yt;(0)) 0 and Wt; 0(yt;(jY
ntj+1)) 1. Then the randomization is
done by signaling an out-of-control alarm with probability
Pin; 0;RU CL = Pin P (fWt; 0(yt) > RU CL 0g; Fy t; 0) P (fWt; 0(yt) = RU CL 0g; Fy t; 0) = Pin PjYntj r=m 0;U+1 P (fWt; 0(yt) = Wt; 0(yt;(r))g; Fy t; 0) Pm 0;U r=m 0;L P (fWt; 0(yt) = Wt; 0(yt;(r))g; Fy t; 0) :(51) This leads to Pin = P Wt; 0(yt) > RU CL 0 ; Fy t; 0 +Pin; 0;RU CL P Wt; 0(yt) = RU CL 0 ; Fy t; 0
randomiza-tion.
The monitoring scheme is as follows: If Wt; 0(yt) > RU CL 0, then the null
hypothesis H0: F t = F 0 is rejected and the manufacturing process is declared
to be out of control at time t; if Wt; 0(yt) < RU CL 0, then the null hypothesis
H0: F t = F 0 is not rejected and the manufacturing process is declared to be
in control at time t; if Wt; 0(yt) = RU CL 0, then, with probability Pin; 0;RU CL,
the null hypothesis H0: F t = F 0 is rejected and the manufacturing process is
declared to be out of control at time t.
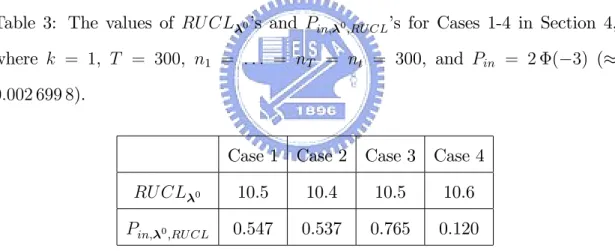
The corresponding values of RU CL 0’s and Pin; 0;RU CL’s for Cases 1-4 in
Sec-tion 4 are shown in Table 3, where k = 1, T = 300, n1 = : : : = nT = nt = 300, and Pin = 2 ( 3) ( 0:002 699 8).
Table 3: The values of RU CL 0’s and Pin; 0;RU CL’s for Cases 1-4 in Section 4,
where k = 1, T = 300, n1 = : : : = nT = nt = 300, and Pin = 2 ( 3) (
0:002 699 8).
Case 1 Case 2 Case 3 Case 4
RU CL 0 10.5 10.4 10.5 10.6
Pin; 0;RU CL 0.547 0.537 0.765 0.120
7.2
AN EMPIRICAL BAYES MONITORING SCHEMEIn this subsection, consider the case where F = F 0 2 fF : 2 g for some
unknown 0 2 . To monitor the manufacturing process at time t (> T ), the null hypothesis H0: F t = F 0 versus the alternative H1: F t 6= F 0 is tested.
The LR statistic Wt; 0(yt) proposed in Section 7.1 for known 0 can be
esti-mated by Wt; 0(yt)j 0= ^ ( Wt;^(yt)), where ^ is the MLE of given y and
Wt;^(yt) = 2 n
log f (ytj t)j t=yt=nt ` ^; yt
o
(52)
with P (f0 < Wt;^(yt) < 1g; Fyt; 0) = 1. Note that ^ =
0
+ Op(1= p
T ) as T ! 1, which implies that Wt;^(yt) = Wt; 0(yt) + Op(1=
p
T )as T ! 1.
An empirical Bayes monitoring scheme can be constructed by replacing the
unknown 0 by ^ in the Bayesian monitoring scheme described in Section 7.1,
where RU CL 0 and Pin; 0;RU CL are estimated by RU CL 0j 0= ^ ( RU CL^) and
Pin; 0;RU CLj 0= ^ ( Pin; ^ ;RU CL), respectively.
To see how the additional estimation error resulting from the empirical Bayes approach a¤ects the performance of the monitoring scheme, the Kullback-Leibler divergence d(F 0; F^) between F 0 and F^ can be used as a measure of how close
F^ is to F 0, where F^ F j = ^ and d (F 0; F^) Z log ( t; )j = 0 ( t; )j = ^ ( t; )j = 0d t Z log " ( t; 0) ( t; ^) # ( t; 0) d t: (53)
When there is no closed-form formula for d(F 0; F^), it can be numerically
evaluated as follows: First simulate an i.i.d. sample f (1)1 ; : : : ;
(R1)
1 g of size R1, e.g., R1 = 50 000, from the in-control prior c.d.f. F 0 and then numerically
evalu-ate d(F 0; F^)by ^ d (F 0; F^) 1 R1 R1 X r=1 log " ( t; 0) ( t; ^) # t= (r)1 : (54)
One way to numerically evaluate the quantile of d(F 0; F^) for 2 (0; 1)
is as follows: First simulate an i.i.d. sample fy(1); : : : ; y(R)
g, e.g., R = 50 000, from the in-control marginal c.d.f. Fy; 0. Let (y(1); : : : ; y(R)) be a permutation
of (y(1); : : : ; y(R)) such that ^d(F 0; F^ (y (1))) : : : ^ d(F 0; F^ (y (R))). Then the
quantile of d(F 0; F^) can be estimated by ^d(F 0; F^ (y
([R ]))), where [R ] is the
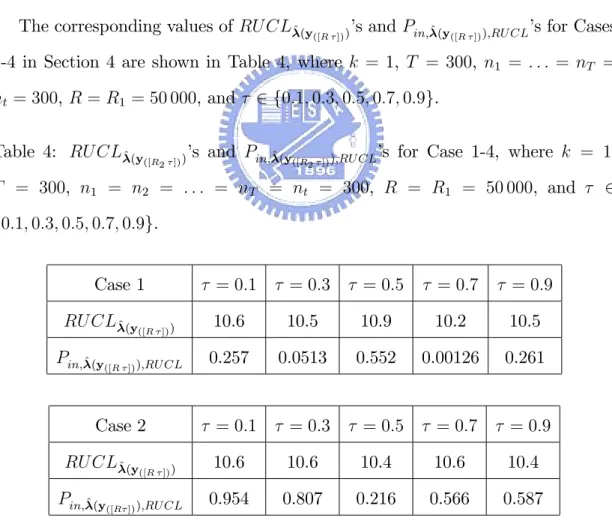
largest integer less than or equal to R . The corresponding values of RU CL^ (y
([R ]))’s and Pin; ^ (y([R ]));RU CL’s for Cases
1-4 in Section 4 are shown in Table 4, where k = 1, T = 300, n1 = : : : = nT = nt = 300, R = R1 = 50 000, and 2 f0:1; 0:3; 0:5; 0:7; 0:9g.
Table 4: RU CL^ (y
([R2 ]))’s and Pin; ^ (y([R2 ]));RU CL’s for Case 1-4, where k = 1,
T = 300, n1 = n2 = : : : = nT = nt = 300, R = R1 = 50 000, and 2 f0:1; 0:3; 0:5; 0:7; 0:9g. Case 1 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 RU CL^ (y ([R ])) 10.6 10.5 10.9 10.2 10.5 Pin; ^ (y ([R ]));RU CL 0.257 0.0513 0.552 0.00126 0.261 Case 2 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 RU CL^ (y ([R ])) 10.6 10.6 10.4 10.6 10.4 Pin; ^(y ([R ]));RU CL 0.954 0.807 0.216 0.566 0.587
Case 3 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 RU CL^(y ([R ])) 10.5 10.3 10.3 10.5 10.6 Pin; ^ (y ([R ]));RU CL 0.688 0.0511 0.433 0.840 0.602 Case 4 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 RU CL^ (y ([R ])) 10.5 10.4 10.7 10.5 10.3 Pin; ^ (y ([R ]));RU CL 0.346 0.506 0.353 0.449 0.553
From Tables 3 and 4, it is easily seen that all of RU CL^(y
([R ]))’s are close
to RU CL 0, but P
in; ^(y([R ]));RU CL’s are not necessarily close to Pin; 0;RU CL for
Cases 1-4.
8
AVERAGE RUN LENGTH BEHAVIORIn this section, the performance of the proposed process monitoring scheme is studied in terms of the average run length. Let ARL0 denote the average run length for an out-of-control signal to occur when the manufacturing process is in control. Recall that Pin is the false-alarm rate, i.e., the probability that an out-of-control signal occurs when the manufacturing process is in out-of-control. Then ARL0 = 1=Pin. When Pin = 2 ( 3) ( 0:002 699 8), ARL0 = 1=[2 ( 3)] ( 370:40). Let ARL1 denote the average run length for an out-of-control signal to occur when the manufacturing process is out of control. Let Pout denote the correct-alarm rate, i.e., the probability that an out-of-control signal occurs when the manufacturing process is out of control. Similarly, ARL1 = 1=Pout.
8.1
A BAYESIAN APPROACHIn this subsection, consider the case where F = F 0 2 fF : 2 g for some
known 0 2 . To monitor the manufacturing process at time t, the monitoring
scheme proposed in Section 7.1 is used for the null hypothesis H0: F t = F 0
versus the alternative H1: F t 6= F 0.
Set ARL0 ARL0; 0, Pin Pin; 0, ARL1 ARL1; 0;F
t, and Pout Pout; 0;F
t.
When Pin; 0 is pre-speci…ed to be 2 ( 3) ( 0:002 699 8),
ARL0; 0 = 1 Pin; 0 = 1 2 ( 3) 370:40: (55) When F t 6= F 0, Pout; 0;F t = P Wt; 0(yt) > RU CL 0 ; Fy t +Pin; 0;RU CL P Wt; 0(yt) = RU CL 0 ; Fy t ; (56)
where all of Wt; 0(yt), RU CL 0, and Pin; 0;RU CL are de…ned in Section 7.1 and
Fyt is de…ned in Section 3.
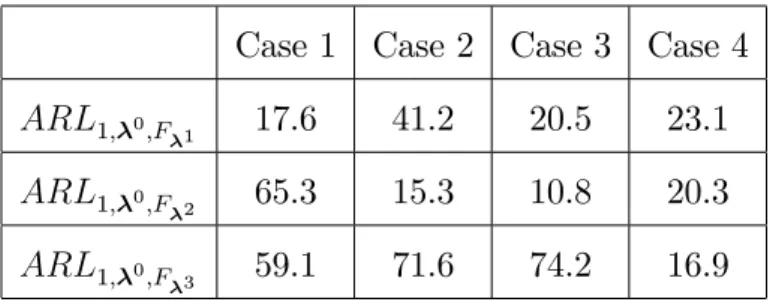
The corresponding values of Pout; 0;F
i’s, and ARL1; 0;F i’s for Cases 1-4 in
Section 4 are shown in Tables 5 and 6, where k = 1, T = 300, n1 = : : : = nT = nt = 300, and i 2 f1; 2; 3g.
Case 1: 1 = (log(1=4); log(80); log(20); 2:210; log[1=(0:210)2])T, 2 = (log(1= 9); log(90); log(10); 1:552; log[1=(0:220)2])T, and 3 = (log(4=21); log(80); log(20);
0:503; log[1=(0:216)2])T.
Case 2: 1 = (log(9=11); log(85); log(15); 0:510; log[1=(0:210)2])T, 2 = (log(11=9); log(72); log(18); 2:030; log[1=(0:210)2])T, and 3
log(20); 0:203; log[1=(0:202)2])T.
Case 3: 1 = (log(2=3); log(65); log(35); 0:110; log[1=(0:210)2])T, 2 = (log(1); log(70); log(30); 2:005; log[1=(0:253)2])T, and 3 = (log(3=2); log(60); log(40); 0:2 03; log[1=(0:202)2])T.
Case 4: 1 = (log(4); log(70); log(20); 1:510; log[1=(0:210)2])T, 2 = (log(3); log(88); log(22); 1:203; log[1=(0:220)2])T, and 3 = (log(83=17); log(80); log(20); 1:203; log[1=(0:041)2])T.
Table 5: The values of Pout; 0;F
i’s for Cases 1-4, where k = 1, T = 300, n1 = : : : =
nT = nt = 300, and i 2 f1; 2; 3g.
Case 1 Case 2 Case 3 Case 4
Pout; 0;F 1 0.0568 0.024 0.0487 0.0434 Pout; 0;F 2 0.0153 0.0652 0.0929 0.0492 Pout; 0;F 3 0.0169 0.0140 0.0135 0.0590
Table 6: The values of ARL1; 0;F
i’s for Cases 1-4, where k = 1, T = 300, n1 =
: : : = nT = nt= 300, and i 2 f1; 2; 3g.
Case 1 Case 2 Case 3 Case 4
ARL1; 0;F 1 17.6 41.2 20.5 23.1 ARL1; 0;F 2 65.3 15.3 10.8 20.3 ARL1; 0;F 3 59.1 71.6 74.2 16.9
8.2
AN EMPIRICAL BAYES APPROACHIn this subsection, consider the case where F = F 0 2 fF : 2 g for some
unknown 0 2 . To monitor the manufacturing process at time t, the monitoring scheme proposed in Section 7.2 is used for the null hypothesis H0: F t = F 0
versus the alternative H1: F t 6= F 0.
Set ARL0 ARL0; 0;^, Pin Pin; 0;^, ARL1 ARL1; 0;^ ;F
t, and Pout
Pout; 0;^ ;F
t. When ^ =
0
, which is nearly impossible, we have Pin; 0;^ = Pin; 0
and Pout; 0;^ ;F t
= Pout; 0;F
t, where both Pin;
0 and Pout; 0;F
t are de…ned in
Sec-tion 8.1. When ^ 6= 0, we have
Pin; 0;^ = P n Wt;^(yt) > RU CL^ o ; Fyt; 0 +Pin;^;RU CL P nWt;^(yt) = RU CL^ o ; Fyt; 0 (57) and Pout; 0;^ ;F t = P n Wt;^(yt) > RU CL^ o ; Fyt +Pin; ^ ;RU CL P nWt;^(yt) = RU CL^ o ; Fyt ; (58)
where all of Wt;^(yt), RU CL^, and Pin; ^;RU CL are de…ned in Section 7.2 and both Fyt; 0 and Fy
t are de…ned in Section 3.
To see how the additional estimation error resulting from the empirical Bayes approach a¤ects the performance of the average run length, the Kullback-Leibler divergence d(F 0; F^)between F 0 and F^ de…ned in Section 7.2 can be used as a
measure of how close F^ is to F 0. See Section 7.2 for details.
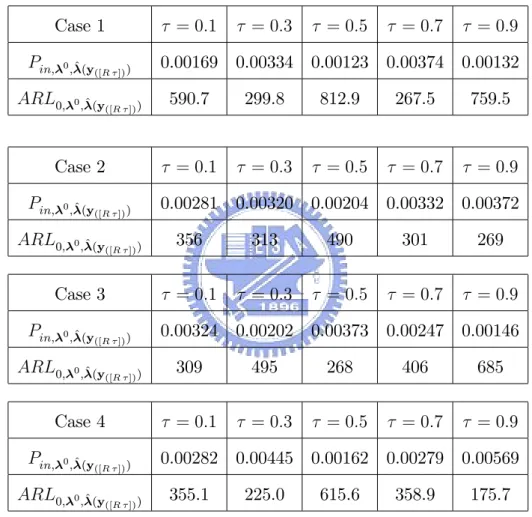
1-4 in Section 4 are shown in Table 7, where k = 1, T = 300, n1 = : : : = nT = nt = 300, R = R1 = 50 000, and 2 f0:1; 0:3; 0:5; 0:7; 0:9g.
Table 7: The values of Pin; 0;^ (y
([R2 ]))’s and ARL0; 0;^(y([R ]))’s for Cases 1-4, where
k = 1, T = 300, n1 = : : : = nT = nt = 300, R = R1 = 50 000, and 2 f0:1; 0:3; 0:5; 0:7; 0:9g. Case 1 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pin; 0;^ (y ([R ])) 0.00169 0.00334 0.00123 0.00374 0.00132 ARL0; 0;^ (y ([R ])) 590.7 299.8 812.9 267.5 759.5 Case 2 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pin; 0;^ (y ([R ])) 0.00281 0.00320 0.00204 0.00332 0.00372 ARL0; 0;^ (y ([R ])) 356 313 490 301 269 Case 3 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pin; 0;^ (y ([R ])) 0.00324 0.00202 0.00373 0.00247 0.00146 ARL0; 0;^ (y ([R ])) 309 495 268 406 685 Case 4 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pin; 0;^ (y ([R ])) 0.00282 0.00445 0.00162 0.00279 0.00569 ARL0; 0;^ (y ([R ])) 355.1 225.0 615.6 358.9 175.7
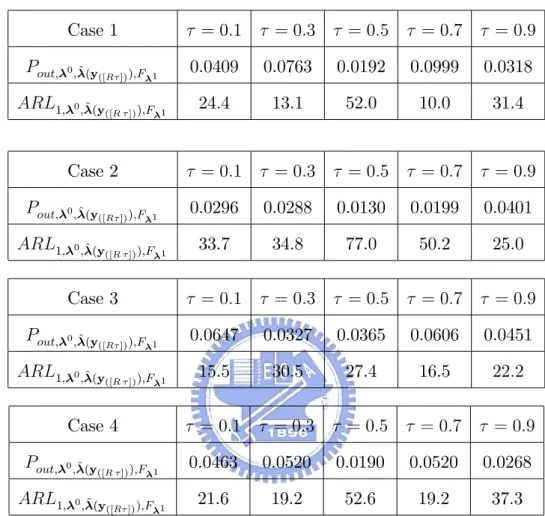
The corresponding values of Pout; 0;^(y
([R ]));F i’s and ARL1; 0;^ (y([R ]));F i’s for
Cases 1-4 in Section 4 are shown in Tables 8-10, where k = 1, T = 300, n1 = : : : = nT = nt = 300, R = R1 = 50 000, 2 f0:1; 0:3; 0:5; 0:7; 0:9g, and i 2 f1; 2; 3g. Table 8: The values of Pout; 0;^ (y );F ’s and ARL1; 0;^ (y );F ’s for Cases
1-4, where k = 1, T = 300, n1 = : : : = nT = nt = 300, R = R1 = 50 000, and 2 f0:1; 0:3; 0:5; 0:7; 0:9g. Case 1 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 1 0.0409 0.0763 0.0192 0.0999 0.0318 ARL1; 0;^(y ([R ]));F 1 24.4 13.1 52.0 10.0 31.4 Case 2 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 1 0.0296 0.0288 0.0130 0.0199 0.0401 ARL1; 0;^(y ([R ]));F 1 33.7 34.8 77.0 50.2 25.0 Case 3 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 1 0.0647 0.0327 0.0365 0.0606 0.0451 ARL1; 0;^(y ([R ]));F 1 15.5 30.5 27.4 16.5 22.2 Case 4 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 1 0.0463 0.0520 0.0190 0.0520 0.0268 ARL1; 0;^ (y ([R ]));F 1 21.6 19.2 52.6 19.2 37.3
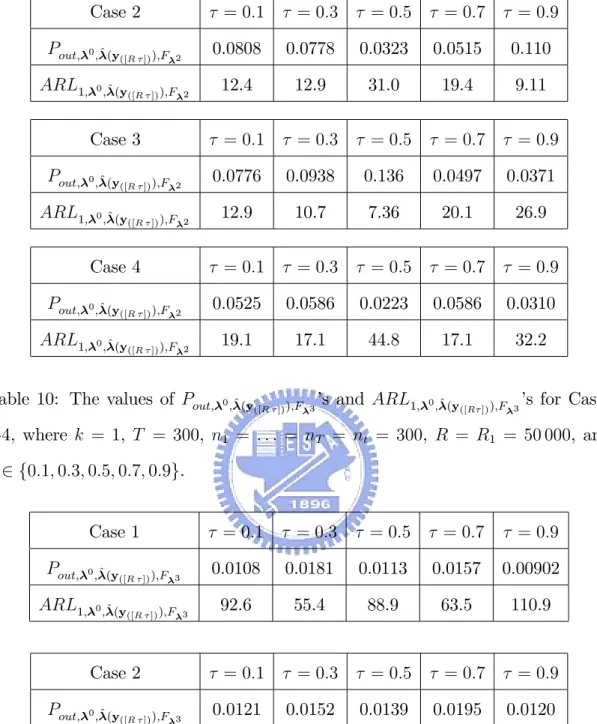
Table 9: The values of Pout; 0;^ (y
([R ]));F 2’s and ARL1; 0;^ (y([R ]));F 2’s for Cases
1-4, where k = 1, T = 300, n1 = : : : = nT = nt = 300, R = R1 = 50 000, and 2 f0:1; 0:3; 0:5; 0:7; 0:9g. Case 1 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^(y ([R ]));F 2 0.0126 0.0184 0.00802 0.0218 0.0108 ARL1; 0;^(y ([R ]));F 2 79.5 54.4 125 46.0 92.8
Case 2 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 2 0.0808 0.0778 0.0323 0.0515 0.110 ARL1; 0;^(y ([R ]));F 2 12.4 12.9 31.0 19.4 9.11 Case 3 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 2 0.0776 0.0938 0.136 0.0497 0.0371 ARL1; 0;^(y ([R ]));F 2 12.9 10.7 7.36 20.1 26.9 Case 4 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 2 0.0525 0.0586 0.0223 0.0586 0.0310 ARL1; 0;^(y ([R ]));F 2 19.1 17.1 44.8 17.1 32.2
Table 10: The values of Pout; 0;^ (y
([R ]));F 3’s and ARL1; 0;^ (y([R ]));F 3’s for Cases
1-4, where k = 1, T = 300, n1 = : : : = nT = nt = 300, R = R1 = 50 000, and 2 f0:1; 0:3; 0:5; 0:7; 0:9g. Case 1 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 3 0.0108 0.0181 0.0113 0.0157 0.00902 ARL1; 0;^(y ([R ]));F 3 92.6 55.4 88.9 63.5 110.9 Case 2 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 3 0.0121 0.0152 0.0139 0.0195 0.0120 ARL1; 0;^(y ([R ]));F 3 82.8 65.9 72.1 51.3 83.2
Case 3 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 3 0.0199 0.00786 0.00911 0.0182 0.0121 ARL1; 0;^ (y ([R ]));F 3 50.3 127 109 55.1 82.6 Case 4 = 0:1 = 0:3 = 0:5 = 0:7 = 0:9 Pout; 0;^ (y ([R ]));F 3 0.0627 0.0695 0.0282 0.0695 0.0383 ARL1; 0;^ (y ([R ]));F 3 16.0 14.4 35.5 14.4 26.1
From Tables 8-10, there is no pattern that the values of Pin; 0;^ and Pout; 0;^ ;F i
for Case 1-Case 4 increase as the Kullback-Leibler divergence d(F 0; F^)increases,
where k = 1, T = 300, n1 = : : : = nT = nt = 300, R = R1 = 50 000, and
i2 f1; 2; 3g.
9
CONCLUSIONSIn the paper, …rst, a two-components mixture prior parametric family for the in-control prior distribution is proposed in a manufacturing process. Then an em-pirical Bayes approach is proposed when there are available in-control categorical data generated from the manufacturing process. As an illustration, an example of the proposed empirical Bayes model is introduced. For the purpose of model building, the goodness of …t and the simpli…cation of the proposed model are dis-cussed. Utilizing the likelihood ratio method, both Bayesian and empirical Bayes monitoring techniques are proposed as the main purpose of the paper. Finally, the performance of the proposed process monitoring scheme is studied in terms of the average run length to show the robustness of the methodology.
APPENDIX
All of nodes and weights of the Hermite polynomial of 32 degrees are shown in the following table. This table is obtained from the following website:
http://www.efunda.com/math/num_integration/…ndgausshermite.cfm
No. i abscissas xi weights wi
1 7:12581390983 7:31067642754 10 23 2 6:40949814928 9:23173653482 10 19 3 5:81222594946 1:19734401957 10 15 4 5:27555098664 4:21501019491 10 13 5 4:77716450334 5:93329148347 10 11 6 4:30554795347 4:09883215841 10 9 7 3:85375548542 1:57416779440 10 7 8 3:41716749282 3:65058512533 10 6 9 2:99249082501 5:41658405999 10 5 10 2:57724953773 5:36268365495 10 4 11 2:16949918361 3:65489032677 10 3 12 1:76765410946 1:75534288315 10 2 13 1:37037641095 6:04581309559 10 2 14 0:97650046359 1:51269734077 10 1 15 0:58497876544 2:77458142303 10 1 16 0:19484074157 3:75238352593 10 1
No. i abscissas xi weights wi 17 0:19484074157 3:75238352593 10 1 18 0:58497876544 2:77458142303 10 1 19 0:97650046359 1:51269734077 10 1 20 1:37037641095 6:04581309559 10 2 21 1:76765410946 1:75534288315 10 2 22 2.16949918361 3:65489032677 10 3 23 2:57724953773 5:36268365495 10 4 24 2:99249082501 5:41658405999 10 5 25 3:41716749282 3:65058512533 10 6 26 3:85375548542 1:57416779440 10 7 27 4:30554795347 4:09883215841 10 9 28 4:77716450334 5:93329148347 10 11 29 5:27555098664 4:21501019491 10 13 30 5:81222594946 1:19734401957 10 15 31 6:40949814928 9:23173653482 10 19 32 7:12581390983 7:31067642754 10 23
REFERENCES
1. Agresti, A. (2002). Categorical Data Analysis, 2nd ed. John Wiley & Sons, New York.
3. Chen, C.-R. and Liu, C.-Y. (2005). A Model Selection Technique Between Two Empirical Bayes Models for Categorical Data. Technical Report, Insti-tute of Statistics, National Chiao Tung University, Hsinchu, Taiwan.
4. Chen, C.-R., Shiau, J.-J. H., Liao, H.-H., and Feltz, C. J. (2004). A process monitoring technique for categorical data under the beta-binomial/Dirichlet-multinomial empirical Bayes model. Technical Report, Institute of Statistics, National Chiao Tung University, Hsinchu, Taiwan.
5. Chen, C.-R., Shiau, J.-J. H., Lin, T.-Y., and Feltz, C. J. (2005). A process monitoring technique for categorical data under the transformed-normal-binomial/multinomial empirical Bayes model. Technical Report, Institute of Statistics, National Chiao Tung University, Hsinchu, Taiwan.
6. Fahrmeir, A. and Tutz, G. (2001). Multivariate Statistical Modelling Based on Generalized Linear Models, 2nd ed. Springer-Verlag, New York.
7. Gelman, A., Carlin, J. B., Stern, H. S., and Rubin, D. B. (2004). Bayesian Data Analysis, 2nd ed. Chapman & Hall/CRC, Boca Raton.
8. Johnson, N. L., Kotz, S., and Balakrishnan, N. (1997). Discrete Multivariate Distributions. John Wiley & Sons, New York.
9. McCullagh, P. and Nelder, J. A. (1989). Generalized Linear Models, 2nd ed. Chapman and Hall, London.
10. McLachlan, G. J. and Peel, D. (2000). Finite Mixture Models. John Wiley & Sons, New York.
11. O’Hagan, A. and Forster, J. (2004). Kendall’s Advanced Theory of Statistics, Volume 2B: Bayesian Inference, 2nd ed. Arnold, London.
12. Shiau, J.-J. H., Chen, C.-R., and Feltz, C. J. (2005). An empirical Bayes process monitoring technique for polytomous data. Quality and Reliability Engineering International, 21, 13-28.
13. Yousry, M. A., Sturm, G. W., Feltz, C. J., and Noorossana, R. (1991). Process monitoring in real time: empirical Bayes approach - discrete case. Quality and Reliability Engineering International, 7, 123-132.
![Table 1: The values of W T (y ([R (1 )]) )’s for Cases 1-4, where k = 1, T = 300, n 1 = : : : = n T = n t = 300, R = 50 000, and = 0:05.](https://thumb-ap.123doks.com/thumbv2/9libinfo/8759111.207775/33.892.128.722.545.1027/table-values-w-t-r-cases-t-r.webp)