考量跟車及變換車道行為之高快速公路微觀車流模式研究
100
0
0
全文
(2) 考量跟車及變換車道行為之高快速公路微觀車流模式研究 A Study of Microscopic Traffic Flow Model on Freeway and Highway with Car Flowing and Lane Changing 研 究 生:徐立新. Student:Li Hsin Hsu. 指導教授:吳水威. Advisor:hoei Uei Wu. 國 立 交 通 大 學 運輸科技與管理學系 碩士論文. A Thesis Submitted to Department of Transportation Technology & Management College of Management National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master in Transportation Technology and Management June 2005 Hsinchu, Taiwan, Republic of China. 中 華 民 國 九 十 四 年 六 月.
(3) 考量跟車及變換車道行為之高快速公路微觀車流模式研究 學生姓名:徐立新. 指導教授:吳水威 國立交通大學運輸科技與管理學系碩士班. 中文摘要 台灣車輛持有率逐年增加,交通問題益顯複雜,更顯示出衍生駕駛行為不確 定性(Uncertainty)相對提高。然而改善現有交通問題,在觀念與作法上已逐漸由增 加道路容量的供給方式,轉變成有效利用現有資源與交通設施的管理措施。智慧 型運輸系統(Intelligent Transportation Systems, ITS)乃當前世界各國對改善交通問 題之有效措施。ITS 發展影響所及非常廣,其中車流模型之建立,可作為交通管理 者的決策分析工具之一,並可提供即時的交通路況資訊之服務。交通管理首重車 流行為特性之瞭解,透過分析以瞭解與掌握車流行為特性,進而加以模組化,將 可作為交通管理者的決策分析工具,亦可提供即時的交通路況資訊,為實現智慧 型運輸系統所不可或缺的重要環節。因此微觀車流模式開發後有助於建立即時控 制策略,其中跟車行為及變換車道行為是微觀車流模式重要部份之一。 本研究係以國內高快速公路小客車為研究對象,並基於微觀理念、近微觀理 念、刺激-反應原理、跟車理論、行為門檻、駕駛行為理論(變換車道)等理論 基礎,採用文獻評析法、攝影調查法、實車測試法、統計分析法、及模式參數校 估法等,構建與驗證高快速公路微觀車流模式,以供整體微觀車流模型之基礎。 然而本研究之高快速公路微觀車流模式包括有跟車模式及變換車道模式,其中跟 車模式主要係利用實車測試法蒐集駕駛者跟車資料,分析跟車行為特性,構建 GM 跟車行為門檻模式,了解 GM 跟車模式之影響範圍,改善 GM 跟車模式之缺失。 變換車道模式則是以攝影調查法蒐集高速公路變換車道資料,分析變換車道行為 特性,以構建變換車道偏向角模式以及加速度模式,並以所構建之變換車道偏向 角模式及加速度模式為基礎,進一步建立變換車道決策模式。因此,經由本研究 結果將可供高快速公路智慧型運輸系統中,控制與管理所需之微觀車流模式。 關鍵字:智慧型運輸系統、微觀車流、跟車、變換車道。. i.
(4) A Study of Microscopic Traffic Flow Model on Freeway and Highway with Car Flowing and Lane Changing Student:Li Hsin Hsu. Advisor:Shoei Uei Wu. Department of Transportation Technology & Management National Chiao Tung University. ABSTRACT 英文摘要. The intelligent transportation system(ITS) is the countries all over the world to improving the problem effective measure of the traffic at present. ITS development is influenced very widely in one's power. The traffic flow model can be as the traffic administrator's decision and analysis tools and can offer the service of the traffic road conditions information immediately. Hence, the microscopic traffic flow model is importance of intelligent transportation system to contribute to setting up instant control strategy. The car following and lane changing are one of the important parts of microscopic traffic flow model. The research object is a passenger car on freeway and highway in Taiwan, and the research’s theory is the microscopic concept (or approximate microscopic concept), stimulus-response principle, car follow theory, behavioral threshold model, drive behavior, etc. It’s to structure and verify the microscopic traffic flow model on the freeway and highway for the foundation of the whole microscopic traffic flow model with the literature review, video investigation method, car following experiment method, statistics analytic approach, and parameter calibration, etc., However, the microscopic traffic flow model on freeway and highway includes with the car follow model and lane change model. The data of car following for the car follow model is collected by the car following experiment method, and analyses the behavior characteristic of car following behavior to set up GM car following threshold model which could improve the defect of GM car follow model by understanding the coverage of GM car follow model. The data of lane changing on freeway is collected by the video investigation method, and analyses the behavior characteristic of lane changing to set up lane change angle model and acceleration model. Lane change angle model and acceleration model are the foundation to set up lane change decision model. So, the result of study for microscopic traffic flow model can be supported in the intelligent transportation system on freeway and highway for control and management. Keywords: Intelligent transportation system , microscopic traffic flow, car follow, lane change.. ii.
(5) 誌. 謝. 經過兩來辛苦的耕耘,論文終於順利完成,最需要感謝的是指導教授 吳水威 博士,恩師在本論文撰寫期間,不斷細心指導,提供意見,讓學生從中學習許多, 在生活上,恩師待人處事的態度,更是讓我感受許多,對學生以後在工作上或是 與人相處獲益不少。 在口試期間,承蒙台大龍天立教授以及本系卓訓榮教授撥冗細閱,並提供寶 貴的意見,使本論文謬誤與疏漏之處得以斧正,期中審查亦要感謝卓訓榮教授及 吳宗修教授詳細審閱,並給予建議,使論文更臻嚴謹完備。學生於授業期間,承 蒙系上各位教授給予學生在課業研究的教導,讓學生獲益良多。亦要感謝系上助 理秀蔭姐及幸榮姐在生活上的協助,使得學生在交大運管的求學生涯得以順利畢 業。 論文研究期間,感謝乃哥與俊彬在學術上的支持與交流,感謝威哥能不厭其 煩的跟我討論論文,在論文實驗期間,要感謝同 LAB 的學弟維翰、阿凱、彥宏的 幫忙,還有在研究生涯裡,建名、長志、胡神,跟你們在一起,實在是太開心了, 尤其是四個人圍在一起”橋”的時候,此外,研究所的各位好友小 P、郭佳、毛毛、 阿界、阿龍,有你們的參與,才能讓我的研究生活更加歡樂。 最後要感謝我的父母親與家人,從小到大在我求學的路上,給予百分之一百 的支持,今天之所以能夠碩士畢業,你們功勞最大。女友韶華讓我在新竹交大就 讀兩年中,不論是我遇到什麼困難或是受到什麼壓力,總是能給我最好的鼓勵與 安慰,你真是我最好的精神支柱。 要感謝的人實在太多,總而言之,感謝大家對我的關懷與用心,在此跟大家 說聲「謝謝!」. 徐立新 謹致 2005 年 6 月 新竹 交大. iii.
(6) 目錄 中文摘要............................................................................................................................i 英文摘要...........................................................................................................................ii 誌 謝..............................................................................................................................iii 目錄..................................................................................................................................iv 表目錄..............................................................................................................................vi 圖目錄.............................................................................................................................vii 第一章 緒論.....................................................................................................................1 1.1 研究動機.......................................................................................................1 1.2 研究目的.......................................................................................................2 1.3 研究範圍.......................................................................................................3 1.4 研究方法及理論基礎...................................................................................3 第二章 文獻回顧.............................................................................................................5 2.1 跟車方面............................................................................................................5 2.1.1 四大限制方程式.....................................................................................5 2.1.2 刺激-反應方程式 ...................................................................................6 2.1.3 行為門檻模式.......................................................................................10 2.1.4 其它相關研究....................................................................................... 11 2.2 變換車道方面..................................................................................................16 2.2.1 變換車道之決策模式...........................................................................17 2.2.2 變換車道行為.......................................................................................23 2.3 文獻評析..........................................................................................................25 第三章 理論基礎與研究方法.......................................................................................27 3.1 理論基礎..........................................................................................................27 3.1.1 微觀車流理論........................................................................................27 3.1.2 運動學原理............................................................................................29 3.2 研究方法..........................................................................................................29 3.2.1 文獻評析法...........................................................................................29 3.2.2 統計迴歸分析.......................................................................................30 3.2.3 攝影調查法...........................................................................................30 3.2.4 實車測試法...........................................................................................31 第四章 GM 跟車模式門檻及變換車道模式之構建 ...................................................32 4.1 GM 跟車模式門檻之構建 ...............................................................................32 4.1.1 資料蒐集...............................................................................................32 4.1.2 資料特性分析.......................................................................................35 4.1.3 GM 跟車模式門檻之構建 ....................................................................37 4.2 變換車道模式..................................................................................................39. iv.
(7) 4.2.1 變換車道行為模式...............................................................................42 4.2.2 變換車道決策模式...............................................................................62 第五章 變換車道模式參數校估與驗證.......................................................................73 5.1 變換車道加速度模式參數校估......................................................................73 5.1.1 敏感度 α 參數校估................................................................................73 5.1.2 目標車道後車速度調整因子 λ 參數校估 ...........................................73 5.2 變換車道模式驗證..........................................................................................74 5.2.1 變換車道行為模式驗證........................................................................74 5.2.2 變換車道決策模式驗證........................................................................85 第六章 結論與建議.......................................................................................................86 6.1 結論..................................................................................................................86 6.2 建議..................................................................................................................86 參考文獻.........................................................................................................................88. v.
(8) 表目錄 表 4. 1 相對不具冒險性受測者分群表........................................................................38 表 4. 2 相對具冒險性受測者分群表............................................................................39 表 4. 3 僅有目標車道後車之變換車道偏向角相關係數表........................................44 表 4. 4 僅有目標車道前車之變換車道偏向角相關係數表........................................46 表 4. 5 在有目標車道前、後車之偏向角相關係數表.................................................48 表 4. 6 平坡上車輛最大加速度(ft/sec/sec) ..................................................................51 表 4. 7 各類車輛之正常及最大減速度(公尺/秒平方) ................................................51 表 4. 8 僅有目標車道後車之變換車道加速度相關係數表........................................52 表 4. 9 僅有目標車道前車之變換車道加速度相關係數表........................................55 表 4. 10 在有目標車道前、後車之加速度相對係數表..............................................58 表 4. 11 在有目標車道前、後車之加速度相對係數表(續) .......................................59 表 5. 1 僅有目標車道後車之變換車道模式驗證資料表.............................................76 表 5. 2 僅有目標車道前車之變換車道模式驗證資料表.............................................79 表 5. 3 目標車道前、後皆有車之變換車道模式-前段加速度模式驗證資料表 .......81 表 5. 4 目標車道前、後皆有車之變換車道模式-後段加速度模式驗證資料表 .......83. vi.
(9) 圖目錄 圖 1. 1、研究流程圖........................................................................................................4 圖 2. 1 同一車道前後車之相對運動過程示意圖........................................................10 圖 2. 2 行為門檻關係圖................................................................................................. 11 圖 2. 3 跟車控制架構圖[15] .........................................................................................15 圖 2. 4 最差情況下座車避免碰撞前車之示意圖[15] .................................................19 圖 2. 5 下匝道車輛變換車道行為示意圖....................................................................22 圖 3. 1 跟車模式示意圖................................................................................................28 圖 4. 1 車長及車寬示意圖............................................................................................41 圖 4. 2 車輛安全間距示意圖.........................................................................................42 圖 4. 3 車輛間之距離示意圖.........................................................................................42 圖 4. 4 車輛變換車道之偏向角示意圖.........................................................................42 圖 4. 5 本車車速與在僅有目標車道後車之變換車道偏向角關係圖........................45 圖 4. 6 本車車速與在僅有目標車道前車之變換車道偏向角關係圖........................46 圖 4. 7 目標車道前車和本車相對距離與在僅有目標車道前車之變換車道偏向角關 係圖.................................................................................................................................47 圖 4. 8 本車車速與在有目標車道前、後車之變換車道偏向角關係圖.....................48 圖 4. 9 目標車道前車和本車相對距離與在有目標車道前、後車之變換車道偏向角 關係圖.............................................................................................................................49 圖 4. 10 僅有目標車道後車之變換車道加速度與本車和目標車道後車之相對速度 關係圖.............................................................................................................................52 (VAX − VD ) 圖 4. 11 僅有目標車道後車之變換車道加速度與 ( X A − X D ) 關係圖 ........................53 圖 4. 12 僅有目標車道後車之變換車道加速度模式示意圖.......................................54 圖 4. 13 車輛變換車道初速度示意圖..........................................................................54 圖 4. 14 僅有目標車道前車之變換車道加速度與目標車道前車和本車之相對速度 關係圖.............................................................................................................................56 (VC − VAX ) 圖 4. 15 僅有目標車道前車之變換車道加速度與 ( X C − X A ) 關係圖 ........................56 圖 4. 16 僅有目標車道前車之變換車道加速度模式示意圖.......................................57 圖 4. 17 目標車道前後皆有車之變換車道前段加速度與本車和目標車道後車之相 對速度關係圖.................................................................................................................59 (VAX − VD ) 圖 4. 18 目標車道前後皆有車之變換車道前段加速度與 ( X A − X D ) 關係圖 ...........60. vii.
(10) 圖 4. 19 目標車道前後皆有車之變換車道後段加速度與目標車道前車和本車之相對 速度關係圖.....................................................................................................................60 (VC − VAX ) 圖 4. 20 目標車道前後皆有車之變換車道後段加速度與 ( X C − X A ) 關係圖 ...........61 圖 4. 21 目標車道前、後皆有車之加速度模式示意圖...............................................61 圖 4. 22 變換車道決策模式架構圖...............................................................................63 圖 4. 23 比較目前車道與目標車道之車流情況流程圖...............................................64 圖 4. 24 本車與前車之變換車道最小安全距離圖.......................................................65 圖 4. 25 預測僅有目標車道後車情況下完成變換車道時與目標車道後車之相對距離 示意圖(一) ......................................................................................................................66 圖 4. 26 預測僅有目標車道後車情況下完成變換車道時與目標車道後車之相對距離 示意圖(二) ......................................................................................................................67 圖 4. 27 預測僅有目標車道前車情況下完成變換車道時與目標車道前車之相對距離 示意圖.............................................................................................................................68 圖 4. 28 預測目標車道前、後皆有車情況下完成變換車道時與目標車道前車及後車 之相對距離示意圖.........................................................................................................69 圖 5. 1 僅有目標車道後車之變換車道偏向角模式驗證圖.........................................75 圖 5. 2 僅有目標車道後車之變換車道加速度模式驗證圖........................................75 圖 5. 3 僅有目標車道前車之變換車道偏向角模式驗證圖........................................78 圖 5. 4 僅有目標車道前車之變換車道加速度模式驗證圖........................................78 圖 5. 5 目標車道前、後皆有車之變換車道偏向角模式驗證圖................................80 圖 5. 6 目標車道前、後皆有車之變換車道前段加速度模式驗證圖........................80 圖 5. 7 目標車道前、後皆有車之變換車道後段加速度模式驗證圖........................82. viii.
(11) 第一章 緒論 1.1 研究動機 中山高速公路自民國 67 年全面通車以來,不僅成為台灣西部一條非常重要之 運輸走廊,更帶動台灣經濟起飛。也因此使得國人私有小汽車持有率逐年增加, 然而隨著交通量之增加,漸使高速公路的容量不敷使用而產生交通擁擠的現象。 一般高速公路上擁擠發生之原因大可分為兩大類,其一為乃是在特定時間於特定 地點,經常發生而可加以預測之擁擠;如上、下午尖峰時間之瓶頸路段,其交通 流量超過公路本身的容量而發生擁擠現象。相對地,如果擁擠發生的地點與時間 事先無法確知者,例如交通事故、車輛拋描等意外事件。 由於台灣車輛持有比率逐年增加,交通問題更顯複雜許多,所衍生出的不確 定性(Uncertainty)亦相對提高。再者,運輸建設方案執行速度永遠不及交通需求之 膨脹,因此為了改善現有交通問題,在觀念與作法上已逐漸由增加道路容量的供 給方式,轉變成有效利用現有資源與交通設施的管理措施;隨著科技的進步,高 速公路利用電腦、電子、通訊、控制、整合等技術,配合交通管理與控制策略, 以提昇運輸系統整體效能,以發展高速公路智慧化。 智慧型運輸系統(Intelligent Transportation Systems, ITS)乃當前世界各國對交 通陳疾所祭出之法寶,所謂智慧型運輸系統 (ITS)之定義為「利用電子、電腦軟體 設備、通訊、機械與控制等技術於運輸系統,使運輸系統能提供更安全、有效、 便捷、舒適、及永續之優質服務」,ITS 發展影響所及非常廣,其中車流模型與交 通動態預測系統之建立需要基於理論基礎以求健全,可作為交通管理者的決策分 析工具,並可提供即時的交通路況資訊之服務。 然而交通管理首重車流行為特性之瞭解,若能有效掌握車流型態,即可藉由 先進科技的應用來提升運輸系統效能。利用先進科技蒐集取得真實交通資料,透 過分析以瞭解與掌握車流行為特性,進而加以模組化,將可作為交通管理者的決 策分析工具,亦可提供即時的交通路況資訊,為實現智慧型運輸系統所不可或缺. 1.
(12) 的重要環節。 微觀車流模型開發後有助於建立即時控制策略,以考慮整體路網績效為前 提,提升交通系統服務水準。此外,交通管理策略的實施,亦需對於真實車流特 性充分瞭解。其他有關智慧型運輸系統管理或策略分析,如事件管理、優先號誌、 路徑導引、旅行時間預測等,所需進行之車流特性研究之課題,亦為該項主題涵 蓋範圍。 跟車行為及變換車道行為是微觀車流模式重要部份之一,跟車行為方面,以 往跟車行為大都採用刺激-反應方程式,其中後車不論在何種情況下均受前車影響 之假設極不合理,因此本研究將以實際跟車測試蒐集資料並分析跟車行為特性, 研析車輛跟車行為,以構建合乎國內高快速公路現況之 GM 跟車模式門檻。 變換車道方面,由於過去研究大多著重於駕駛者變換車道決策模式,如訂定 變換車道之條件,但所訂定之條件過於過於僵固,沒有彈性,其適用性有待進一 步探討,後來有人利用類神經網路等方法來建立變換車道模式,但其資料係以駕 駛模擬器方法蒐集,較無真實性。因此,本研究考慮車輛在變換車道過程中,目 的在於改善變換車道前之行車速度,並且在安全之前提下,採取變換車道,所考 慮的因素包括有:本車與前車、鄰近車道前車及鄰近車道後車之間相互影響之關 係,故本研究將藉由攝影調查方式,分析目前台灣高快速公路之變換車道行為特 性,構建符合現況之變換車道行為模式及變換車道決策模式。. 1.2 研究目的 基於上述動機本研究之主要目的可歸納如下: 1. 分析國內高快速公路跟車行為特性及變換車道行為特性。 2. 根據高快速公路跟車行為特性,構建合乎國內高快公路跟車行為特性之 GM 跟 車模式門檻,以做為建立微觀動態車流模型之基礎。 3. 根據高快速公路車變換車道特性,構建合乎現況之變換車道行為模式及變換車 道決策模式,以做為建立微觀動態車流模型之基礎。. 2.
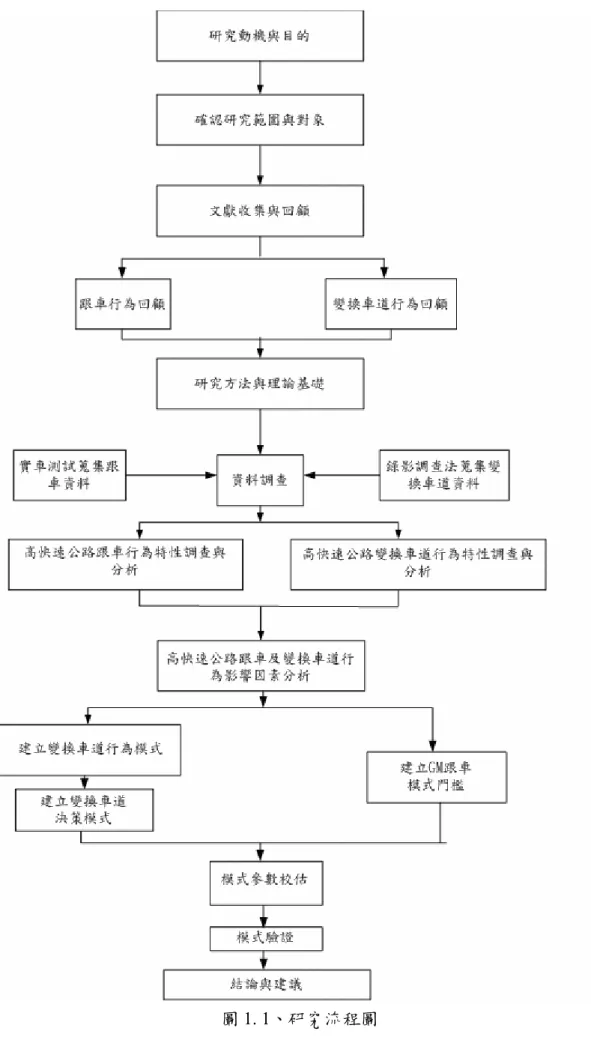
(13) 1.3 研究範圍 本研究主要係研究駕駛者在高快速公路之跟車及變換車道行為,因此以小客 車為研究對象,研究範圍界定於高速快公路主線路段。並考慮以下條件: 1. 路段為無坡度之直線路段:由於路段之幾何設計會影響駕駛者於正常情況下跟 車及變換車道之行為,為簡化影響因素,故僅考慮無坡度直線路段。 2. 內車道及中車道:本研究考慮變換車道之動機,故為區分其它非改變行車速度 為目的之變換車道車輛,選擇內車道及中車道做為蒐集資料之研究範圍。 3. 氣候良好,能見度佳:由於本研究是以攝影的方式蒐集資料,因此天氣狀況良 好,才能得到較好的攝影效果。. 1.4 研究方法及理論基礎 本研究旨在建立高快速公路跟車模式以及變換車道模式,在研究方法上主要 採用文獻評析法、攝影調查法、統計分析法、實車測試法等。 至於理論基礎方面,則有微觀理念、近微觀理念、刺激-反應原理、跟車理 論、行為門檻、駕駛行為理論(變換車道)等。 本研究依列流程進行各項研究工作,研究流程圖如圖 1.1 所示,各階段執行工 作簡要說明如下: 1. 研究動機、目的與範圍之確認及界定。 2. 蒐集國內外跟車理論及變換車道模式之相關文獻,並加以回顧、整理及探討。 3. 研究方法與理論基礎之建立。 4. 以實車測試方法蒐集國內駕駛者之跟車資料 5. 以攝影方式調查高快速公路變換車道行為特性。 6. 分析國內高快速公路跟車行為及變換車道行為特性。 7. 高快速公路 GM 車模式門檻、變換車道行為模式及變換車道決策模式之構建。 8. 模式參數校估及模式驗證。 9. 結論與建議。. 3.
(14) 圖 1. 1、研究流程圖. 4.
(15) 第二章 文獻回顧 2.1 跟車方面 所謂跟車(Car Following) 係描述在道路上行駛車輛間的相互關係,即是在研 究後車如何跟隨前車的行為,假設前車和跟隨車輛在行駛過程中,不斷地調整其 行車速度及間距,使其維持一安全距離,以便在發生突發事件時,跟隨車能夠及 時煞停而不致於與前車碰撞。一般常用於研究公路駕駛行為跟車模式有三種:四 大限制方程式、刺激-反應方程式、行為門檻模式。 2.1.1 四大限制方程式 此模式[28]係假設車流在推進過程中,前後車之間必須保持一最小安全間距, 以使後車能夠在前車車尾後方安全地跟隨行進或煞停,而不致於追撞前車,通常 用以模擬路段之車流行為。在車輛之推進方式上,主要考慮四種限制: (一) 間隔限制 (Spacing Restriction) 係指前車因某種因素而緊急煞車停止時,而後車能安全地完成煞車而不致於追 撞前車所應保持的安全間距: S = P + K1VF + K 2. VF2 − VL2 •C 2D. 式中: S : 安全間距 (公尺). P :前車有效車長 (即車長加停車時車輛間之安全間距) (公尺) K1 :後車駕駛反應時間 (秒) K 2 :常數,當採 MKS 制時為 1 公尺/秒 VF :後車車速 (公尺/秒) VL :前車車速 (公尺/秒) D :後車之平均減速度 (公尺/秒). 5. (2-1).
(16) C :常數,當 VF > VL ,C=1. 當 VF ≤ VL ,C=0. (二) 加速限制 (Acceleration Restriction) 係指車輛受限於本身加速性能,單位時間該車所能行進的最大距離。 (三) 停止限制 (Stopping Restriction) 當車輛於路口遇到紅燈或其它因素而必需減速時,單位時間內所能行進之距 離。 (四) 轉彎限制 (Turning Restriction) 車輛於路口轉彎時,為避免受離心力作用所造成的不舒適及傾覆的危險,在 開始轉彎時會以較低的速度行駛,待通過轉彎點時,再行加速。 在考慮前述四項限制條件後之最小行駛距離,即為車輛在單位時間內所能前 進之距離,據此更新輛座標位置與車速,此即為該模式跟車處理之方式。 2.1.2 刺激-反應方程式 有關以刺激-反應理念構建之跟車模式如下[26][27]: 1. Pipes 和 Forbes 理論 Pipes(1953)首先將運動中車輛之間的關係公式化,其以安全距離的觀念來表示 後車的車速與前車間距離的關係,如下式所示。 •. X n +1 ( t ) d n +1 ( t ) = Ln + × Ln 10 ×1.47. 式中:. d n +1 (t ) :後車與前車間距離 (呎). L n :車長 (呎) •. X n +1 (t ) :後車在 t 時間之速度 (MPH). 6. (2-2).
(17) Pipes 假設每一位駕駛者與前行車輛維持的空間與後車的速度成比例且加上一 段距離。Pipes 理論的缺點為在低速與高速情況下會出現低估的現象,這與實際不 符。 Forbes 在跟車模式行為中加入反應時間(Reaction Time),使後車用以判斷是否 該減速煞車,其認為前車之後緣與後車之前緣間的時間間隙(Time Gap)至少應大於 或等於反應時間,所以,最小的時間間距(Time Headway)的數學關係式等於反應時 間加上前車車長距離之行駛時間,如下式所示。. hmin = ∆t +. Ln •. X n (t ). (2-3). 式中: ∆t :反應時間(秒). L n :車長(呎) •. X n (t ) :前車在 t 時間時之速度(MPH) 由上式可知 Forbes 的跟車理論與 Pipes 模式類似,Pipes 考量的距離間與後車 的速度成線性遞增,而 Forbes 的最小安全距離間距與前車之速度成線性遞增。 2. General Motors 模式 美國通用汽車研究群(GM group)利用統計方法,由現場調查資料來建立 m, l 矩陣來建立刺激-反應方程式,模式分別分述如後: (1) GM 第一代模式: 第一代 GM 跟車模式假設駕駛者期望與前一部車保持等速前進,倘若前車速度 改變則會對駕駛者產生刺激效應,受刺激的敏感度保持不變,而後車的加速度與 前後車之間的相對速度是一線性關係,此種觀點表達成下列的方程式:. 7.
(18) . ••. •. •. . X n +1 (t + ∆t ) = α X n (t ) − X n +1 (t ) . . (2-4). 式中: ••. X n +1 (t + ∆t ) :後車在 t + ∆t 時之加減速度 •. X n (t ) :前車在 t 時的速度 •. X n +1 (t ) :後車在 t 時的速度 α :駕駛人反應之敏感度參數 (2) GM 第二代模式: 駕駛者靈敏度係數 λ 是衡量駕駛者受前車刺激後的反應強度,當車輛逐漸接近 前一部車時,駕駛者必定會注意且提高警覺,事實上 λ 應該是變量而非常數,所以 在第二代模式中將其區分為兩種狀態,兩車空間距離短採用較高靈敏值 α 1 ,若兩 車距離較遠,則使用另一較低的靈敏值 α 2 ,模式修正後如下:. α1 • • X n +1 (t + ∆t ) = or X n (t ) − X n +1 (t ) α2 ••. (2-5). 式中, α1 或 α 2 為駕駛人反應之敏感度參數 (3) GM 第三代模式: 研究人員發現 α 1 、α 2 的認定實際上相當困難,經過實證研究後,Herman 將兩 車的距離間距加入敏感項中,指出距離間距是敏感度的函數,距離間距的倒數與 敏感度成正比例的線性關係,而形成第三代模式: ••. X n +1 (t + ∆t ) =. • α0 • X n (t ) − X n +1 (t ) X n (t ) − X n +1 (t ) . 式中,. X n (t ) :前車在 t 時之位置 X n +1 (t ) :後車在 t 時之位置. 8. (2-6).
(19) α 0 :為駕駛人反應之敏感度參數 第三代模式經過積分運算之後可轉換為 Greenberg 巨觀的車流模式。 (4) GM 第四代模式: 第四代模式進一步考慮到車流速度提高時,跟車者對於前後車之間的相對速 度將更為靈敏,因此模式加入跟車者的速度,可表達成: . ••. X n +1 (t + ∆t ) =. . •. α1 X n +1 (t + ∆t ). • • X t − X ( ) n n +1 (t ) X n (t ) − X n +1 (t ) . . (2-7). 式中: •. X n +1 (t + ∆t ) :後車在 t + ∆t 時之速度 α1 :為常數 (5) GM 第五代模式: 五代模式繼續改進而將敏感項一般化,將跟車者速度與距離間距改為指數型 態,模式在引入 m 與 l 兩個指數後變為微觀理論通式: m. • α l , m X n +1 (t + ∆t ) •• • • • X t − X t X n +1 (t + ∆t ) = ( ) ( ) n n 1 + l X n (t ) − X n +1 (t ). [. ]. (2-8). 式中: ••. X n +1 (t + ∆t ) :後車在 t + ∆t 時之加減速度 •. X n +1 (t + ∆t ) :後車在 t + ∆t 時之速度 X n (t ) :前車在 t 時之距離 X n +1 (t ) :後車在 t 時之距離 m, l :駕駛人反應之敏感係數. α l ,m :跟車模式係數 GM 以「敏感-刺激」方程式作為後車反應的機制,共發展五代的跟車模型,. 9.
(20) 其中一至四代模型都是五代的特例,一代及二代模型皆為 m=0,l=0,三代模型則 為 m=0,l=1,四代模型為 m=1,l=1。 2.1.3 行為門檻模式 傳統之刺激-反應方程式有兩項不合理的假設:(1)無論距離多遠,兩車都會互 相影響。(2)當相對速度不變,跟車反應亦不變。然而行為門檻模式[28]係認為當跟 車駕駛者感知到前車與自身之間距及相對速度差異過大時,會加速接近前車以縮 短間距,逐漸由不受影響駕駛範圍進入受影響駕駛範圍;當跟車駕駛者感知到過 於接近前車不安全時,則減速以加大間距;減速後之間距若不合跟車駕駛者之期 望則再加速,而若本車與前車距離太大時,後車則完全不受前車之影響。整個系 統就在本車不斷加減速的自我調整過程中達到穩定跟車狀態。此種駕駛行為會表 現出兩種的特有的跟車現象:(1) 跟車過程處於一微幅振盪調整之間距與速差系統 中;(2) 在各反應狀態下,具有如拋物線形之感知門檻界限,如圖 2.1 所示。 間隔. dx. 不受影響駕駛 (自由) 反應門檻. 反應門檻 受影響駕駛. +dv. -dv 速度差異. 速度差異. 間隔變大. 間隔變小. 圖 2. 1 同一車道前後車之相對運動過程示意圖 Wiedemann(1974)[30]將此「心理—物理間距模式」 (Psycho-Physical Spacing Model)之觀念引進微觀車流模擬裡,構建數學化模式(INTAC Model) ,即為「行 為門檻模式」(Behavioural Threshold Model) ,亦可說是一種跟車決策模式 (Car-Following Decision Model)。模式基本假設仍為單一車道,不考慮變換車道情 形,將車流狀況分成三個反應區:感知反應區(Perceived Reaction)、無意識反應區 (Unconscious Reaction)、無反應區(No Reaction)。經過各感知門檻界限之區隔後, 可再細分為各決策行為分區,如圖 2.2 所示。. 10.
(21) DX 與前車總 (毛)間隔 MAXDX 按期望自由行駛 區 SDX 跟車間隔上限 跟車間隔下限. OPD V. 前車車長. SDV. 追近前車 之 反應門檻. 追近前車區 跟車 行駛區 CLDV BX AX. 避禍煞車區 撞車危險區. -DV 變大. +DV 變小. 兩車間隔. 圖 2. 2 行為門檻關係圖 各行為問檻的意義如下: (1) 靜態間距(AX):本車在靜止狀態時,希望與前車所保持之車頭距 (2) 最小安全間距(BX):前後兩車為緊鄰跟車狀態,本車車速與前車車速 相近時,所欲維持之最小跟車間距。 (3) 感知速差門檻(SDV):在一較大間距下,跟車駕駛者對於速度差異(後 車車速-前車車速)之感知門檻,此門檻值越大,表示後車駕駛者越容易 受前車影響。 (4) 跟車間距上限(SDX):為顧及駕駛者判斷間距能力之差異,一般駕駛者 通常之跟車間距會在最小跟車間距至最小跟車間距的 1.5~2.5 倍之範圍 內。此最大值即為駕駛者的跟車間距上限。 (5) 間距漸減速差門檻(CLDV):在一較小間距、間距漸減且速差為正之情 況下,速度差異之門檻值,由 SDV 與隨機因子計算而得。 (6) 間距漸增速差門檻(OPDV):在一較小間距、間距漸增且速差為負之情 況下,速度差異之門檻值,其值約為 1~3 位 CLDV 值,此因駕駛者通 常對正在遠離物比正在接近物反應較遲緩之因。 2.1.4 其它相關研究 此部份的相關研究大都以 GM 跟車模式為基礎架構,接著由不同的研究方法, 如安全間距、模糊理論、類神經網路、混沌理論等方式對跟車模式作比較及深討。. 11.
(22) 其分述如下: 1.安全間距模式 劉英標[7]以 GM 第五代跟車行為模式與汽車動能及煞車能量不變定律,並考 慮不同冒險度行為對跟車間距之影響,以構成一較完整之本土化跟車模式: 1. 1− m 1−l C 2 g A + Vn +1 1− l µ0 (1 − l ) 3 S0 = ( ∆t ) + ( Ln + θ ) ⋅ Vn +1 ( t1 ) + W ⋅ f ⋅ (1 + δ m ) µ1 α l , m (1 − m ) . (2-9). 式中:. µ0 :冒險度權重 µ1 Vn+1 (t1 ) :後車車速. g :重力加速度 A :迎風表面積( m2 ) C :行駛阻力中風阻之常數項( Newton / kph 2 ) W:車重. f :摩擦係數 Vn+1 :後車煞車前之瞬時速度. δ m ::反應時間 Ln :車身長. θ :兩車煞停後之最小容許間距(約 1 米). α l ,m , l , m :行為參數模式 α l ,m , l , m ,經由實際測試取得跟車資料,再以統計分析校 估得到在 ∆t =1 時, α l ,m =0.97749、m=0.193743、l=0.242990 李樑堅[16]利用攝影蒐集車輛於市區道路之車流資料,首先求得自由流狀態推 進之最低門檻距離(如式 2-10),用以判別車輛行駛在某一階段下是否會受到前車之. 12.
(23) 影響,並且利用統計迴歸分析方法以及動態安全間距,分別求得車輛推進之加速 度,取其較小值做為車輛推進之加速度。. d = p + ( K + 1)Vt −1. (2-10). 式中: d:代表動態最大安全門檻間距值. Vt −1 :本車之期望速度 P:前車之靜態車長 K:反應時間 2.應用模糊理論(Fuzzy Theory) 傳統跟車理論假設每位駕駛人為同質(homogeneous),且假設駕駛人行為與周遭 環境的變化有一明確關係。但通常駕駛人的駕駛行為並無一定規則可尋,且與外 界環境並非一對一的確定關係,其間存在若干的模糊性。因此,Kikuchi and Chakroborty[24]將傳統跟車模型與模糊理論(fuzzy theory)結合,將跟車行為想像為 一模糊控制系統,並用模糊邏輯(fuzzy logic)、模糊推論(fuzzy inference)等方法來 模擬。 Kikuchi 的模型雖能解決上述 GM 的缺點,但推理過程需繁複的計算,因此使 用的績效有限。此外,這個模型也會產生過高的負回饋,使車間距震盪不已。 藍武王[8]等採用與傳統 GM 跟車模型相同的變數:相對速度、前後車距離、 後車速度,其中,前後車距離則引進一個最佳距離的觀念。最佳距離的定義如下:. DISTbest = 136 . × speed n +1 + 20 / 3. (2-11). 式中:. DISTbest :最佳距離(公尺) speed n+1 :後車速度(公尺/秒) 而且透過訪談,向一般駕駛人訽問並觀察其跟車時的經驗法則,設定加減速 控制各只需要一條規則,而每條規則都只要注意距離是否太近或太遠,相對速度. 13.
(24) 是接近還是遠離即可,分述如下: 規則 1. IF 前後車距離太遠,或兩車遠離中. THEN 後車加速. 規則 2. IF 前後車距離太近,或兩車接近中. THEN 後車減速. 經個案實證分析發現,此模型不僅能克服 GM 模型因初速不同導致最終車距 不同的缺點,亦可改善 Kikuchi 等人之模糊跟車模型產生過大負回饋震盪的不合理 現象。 詹維敏[14]同樣是應用模糊理論的方法來處理其真實世界中的不確定性,但 由於駕駛行為的不同,導致跟車時會因速度差造成擠壓與離開的空間狀態,故此 研究將擠壓現象為「迫近相位」,離開現象為「遠離相位」。故此研究認為這兩種 相位對駕駛者在跟車時有不同的反應行為和不同的敏感度,故以雙相配合模糊理 論來研究跟車模式。 林宏達[15]提出以串接式模糊推論系統(CFIS)為基礎之跟車模式,所謂的串接 式模糊推論系統(CFIS) 係利用直接序列展頻達 (DSSS Radar)作為偵測器,以得到 相關車輛之相對距離與相對速度。再依二階段模糊推論器來做串接設計,以得到 後車之加速度值,其跟車控制架構圖如圖 2.3,在 CFIS 之跟車模式裡,特別強調 其跟車模式具有安全、舒適及合理之三大特性,因此林宏達採用舒適性的原則去 調整座車的加減速度參考值,使得座車加減速度參考值的變化呈現慢慢的上升或 下降,但是當發生目標車突然緊急煞車或者突然有鄰車道的車變換到此車道時, 會使得座車的加減速度產生劇烈的變化,且造成座車的舒適性差或安全性低,所 以林宏達多加了緊急狀況與加速度微調系統來調整座車加減速度參考值。然而加 速度微調系統的設計原則為「欲調整的座車加減速度值」隨時間變大時,設計讓 它緩慢加速,當「欲調整的座車加減速度」值隨時間變小時,為了安全性考量, 則不做任何調整,並假設假設-30(km/hr/sec)為最大減速度,為了舒適性考量下, 我們將加速度最大值依然設定在 6(km/hr/sec),寧願拉長跟車的時間來換取座車的 舒適性。. 14.
(25) 圖 2. 3 跟車控制架構圖[15] CFIS 跟車模式解決了 GM 模式在目標車與座車之初始速度的不同而造成最 終安全跟車距離的不同之不合理現象,並也解決了 K&C 跟車模式在最終相對距 離會發生振盪之問題。並且在整個跟車過程中,滿足了合理、安全及舒適三大需 求。 3.應用類神經網路(Neural Network) 林鄉鎮[1]利用虛擬實境技術構建之駕駛模擬系統,來蒐集高速公路小汽車駕 駛者跟車資料,且發現除了以刺激-反應方程式中的三個變數外,跟車當時的車流 狀況亦為重要變數,因此多考慮了車流狀況之變數,構建了六個倒傳遞類神經網 路(BNN)跟車模式,結果顯示受測者在擁擠路段跟車時,在微調與前車之距離的過 程中,的確有與前車保持相同的速度達數秒鐘之情形,因此前後兩車之相對速度 或後車加速度為零時之資料代表穩態的跟車行為,不宜刪除。並且在六個跟車模 式中,均顯示一個隱藏層之倒傳遞類神經網路模式的誤差均方根值較小,且日間 駕駛及夜間駕駛之跟車資料有所差異,故因應分開建立其跟車模式。. 15.
(26) 4.應用模糊類神經(Fuzzy Neural Network) 葉信宏[13]結合傳統跟車行為模式及模糊類神經網路,來學習駕駛人在一般車 流中的駕駛特性及決策過程。為減少模糊理論應用時因主觀判斷對模式帶來的誤 差,嘗試透過類神經網路的學習功能來修正跟車變數的隸屬函數。而且以實際測 得的車流資料來作為網路訓練樣本。並透過群落分析(cluster analysis)利用駕駛人於 跟車時與前車保持的距離為依據,將駕駛人分為高冒險性、中冒險性及低冒險性 三個族群,分別建立三種駕駛人加減速度決策邏輯作為模式的核心。結果發現在 不同冒險者的跟車間距變化、不同前車起始速度下的跟車間距變化、不同起始距 離下的跟車間距變化之三種情況下,所得到之結果為高冒險者的跟車間距變化最 小,中冒險者次之,低冒險者跟車間距變化較大。同時達到穩定車間距的時間與 冒險度成反比。. 2.2 變換車道方面 凡車輛由某一行駛的車道移動變換到鄰近車道上的行為稱為變換車道,根據 王文麟[22]之定義,變換車道行為大致可分為以下二類: 1. 隨意性變換車道 當駕駛者發現車輛之速度小於期望速度時,駕駛者為減少其延滯時間,便會 考慮採取變換車道之行為。且依當時變換車道之條件,大致可分為以下四種情況: (1) 自由性變換車道:即為本車不受其前後車輛及相鄰車道之前後車輛之影響, 而採取之變換車道行為。 (2) 間隙性變換車道:車間距能為需要變換車道之駕駛者所接受,雖大小仍稍嫌 不足,但駕駛者仍採取變換車道行為,其對前行車輛或後隨車輛之正常運行 均產生影響。 (3) 防礙性變換車道:車間距夠大,且變換車道之駕駛者只受前行車輛之影響。 (4) 衝突性變換車道:當變換車道完成之剎那間,駕駛者受後隨車輛之影響。. 16.
(27) 2. 強迫性變換車道 強迫性變換車道為本車與原車道上目標點(前行車輛、匝道加速車道終點)行之 進間距迅速下降趨近於零時,為避免與目標點碰撞,則本車被迫變換至另一車道。 2.2.1 變換車道之決策模式 1. 變換車道門檻準則決策模式 張家祝等[9]認為車輛於高速公路符合下列五個條件便會採取變換車道: (1) 前後兩車車距小於最小跟車距離 (2) 本車車速大於前車車速 (3) 本車車速低於期望車速 85% (4) 鄰近車道之前車車速大於本車車速 3m/sec 或鄰近車道之前車與本車距離 大於最小跟車距離 (5) 本車變換車道後,鄰近車道之後車不致撞上 其中,最小跟車距離張家祝等是採用 B.b Greenshields 之經驗公式,其所得之 最小跟車距離比較符合張家祝等所調查之國內之最小跟車距離。. Dm = 0.20955V + 6.4. (2-12). 式中:. Dm :最小跟車距離(公尺) V :後車車速(公里/小時). 黃國平[17]於市區快車道車輛變換車道之處理乃採用虛擬車法,因此車輛變換 車道時對前後所在車道相關車輛推進均產生影響,並且考慮車輛符合以下之原 則,便可選擇性變換車道: (1) 所在車道之前車速度較低,且兩車相距 30m 內 (2) 目前車速低於願望速度 5m/sec 以上 (3) 鄰車道車速大於前車 3m/sec 以上. 17.
(28) (4) 所在位置至停止線範圍,鄰車道車輛數較少。 並且考慮本車與前車間距、變換至鄰車道後與鄰車道前車之車間距以及變換 至鄰車道後與鄰車道後車之車間距,其車間距假設呈對數常能分配,平均值為 2.268 秒,標準差為 0.402 秒。 李樑堅[16]判斷車輛於市區道路變換車道是否會成功,首先找出與處理 A 車同 車道與鄰近車道之前車 B、B ′,計算 A 與 B、B ′ 於 X 軸推進最遠的車輛偏向角 θ 1、. θ 2 ,而 θ 1 、 θ 2 之值均須小於 A 車最大偏向角,否則不得變換車道。若 A 車位於 選擇變換車道區內,則該車為使其 X 軸推進距離最遠,故選擇 θ 1 與 θ 2 中較大者為 該車變換車道偏向角;若鄰近車道之後車 C 在 T 時刻不會超越 A 車在 T 時刻所在 位置,則 A 車沿其變換車道之偏向角行進,當變換車道車輛在 Y 軸與期望車道路 線座標相吻合時,A 車變換車道行為即完成。其中最大偏向角乃採用傅耀南[18] 所提出之車速與偏向角之關係式。 黃泰林[6]於模式中採用不具冒險性行為的自由性變換車道需滿足以下條件: (1) 本車速度大於前車速度 3.5m/sec 以上 (2) 本車與前車距離小於 45 公尺以內 (3) 前車屬性因子不高於本車且期望速度低於本車 (4) 前車車速小於鄰車道上前方 20m 內之平均動態車速或該範圍內之平均動 態車速為 0 且無車 (5) 本車車速大於鄰車道上後方 15m 內之平均動態車速 (6) 該秒滿足佔位表格後,下一秒即能斜向推進,若不滿足則不佔位,且下 一秒重新判斷。 林鄉鎮[2]則參考黃泰林的方法,加以修正,其不具冒險性行為之自由性變換 車道所需滿足之條件如下: (1) 本車速度大於前車速度 3.5m/sec 以上 (2) 本車與前車距離小於 60 公尺以內 (3) 前車期望速度低於本車. 18.
(29) 陳柏榮[5]於模式中採用之變換車道條件為: (1) 與鄰車道前、後車均須大於最小跟車距離。 (2) 與同車道前車之距離小於最小跟車距離,便不能加速 (3) 本車速度大於同車道之前車速度 (4) 目前速度小於期望速度之 85% (5) 符合可變換車道之機率 林宏達[15]在其智慧型跟車防撞控制系統中,使用 DSSS 雷達偵測鄰車道資 訊,當滿足下列以下四項條件時,即可變換車道: (1) 本車車速小於等於本車期望速度且大於等於同車道之前車車速。 (2) 本車車速大於鄰近車道後車車速,且本車與鄰近車道後車之縱向相對距 離大於縱向安全跟車距離。 (3) 鄰近車道前車車速大於本車車速,且本車與鄰近車道前車之縱向相對距 離大於縱向安全跟車距離。 (4) 本車與前車相對距離大於安全變換車道距離。 其中,安全變換車道距離的定義為:假設在一最壞的狀況下,當本車以加速 度 a 快速併入鄰車道時,前車正以最大減速度 a− max 緊急煞車時,而本車不會碰撞 前車所應保持之距離。. 圖 2. 4 最差情況下座車避免碰撞前車之示意圖[15]. 19.
(30) V −V ' ' 1 ' 2 d s = AB − S1 + LV = t + ( a1 − a− max ) ( t ) + LV > 0 2 3.6 . (2-13). 式中:. d s :安全變換車道距離. t ' :從變換車道開始到座車與前車不會發生碰撞的最小時間 AB :座車由 t0 至 t ' 所行進之距離 S1 :前車由 t0 至 t ' 所行進之距離 V :座車開始變換車道之速度. V ' :表示當座車進入變換車道模式時,前車的初始速度偵測值 LV :車長,定為 5m 2. 二元羅吉特模式 胡順章[20]利用二元羅吉特模式所建立之變換車道模式,:. LC = −0.87584GAPb + 0.99851Vina + 0.35703GAPnbna − 0.011546 Dia (2-14) 式中: LC :決定變換車道之機率. GAPb :前車與本車之時間間距(秒) Vina :本車與鄰近車道後車之相對速度(公尺/秒) GAPnbna :鄰近車道前車與後車之時間間距(秒) Dia :後車車頭與本車車尾之距離(公尺) 由模式之預測率為 85.85%,並由模式中可得到以下四點結果: (1) 當鄰近車道前車與鄰近車道後車之車間距越大時,變換車道機率越大。 (2) 當本車與鄰近車道後車之相對速度越大時,變換車道機率越大。 (3) 前車與本車之時間間距越小時,變換車道機率越大。 (4) 本前與後車距離越小時,變換車道機率越大。. 20.
(31) 賴淑芳[12]亦證明二元羅吉特模式應用於車輛於高速公路匝道併入之預測結 果較普羅比模式及傳統臨界間距模式佳。 3. 應用虛擬實境(VR)及類神經網路 陳奕志[10]利用類神經網路來構建變換車道之決策模式,並且在資料蒐集上考 慮以虛擬實境(VR)之技術,來避免以拍攝攝影帶的方式蒐集變換車道行為資料可 能遭遇到的問題,並以本車車速、鄰車道前車車速、與鄰車道前車距離、本車道 前車車速、與本車道前車距離、鄰車道後車車速、與鄰車道後車之距離做為輸入 變數,其中本車與鄰車道後車距離及速度無法由虛擬實境求出,因此乃利用臨界 間距觀念,以變換車道不被鄰車道後車追撞為原則而自行產生,經由測試得到以 雙層隱藏層構建類神經模式,預測變換車道的準確率高達 95.19﹪,比利用羅吉特 模式 86.51%還要高,由此可知類神經網路比羅吉特更能代表駕駛者變換車道之行 為。 魏建宏、林鄉鎮[3]同樣以虛擬實境之技術蒐集資料,並且利用倒傳遞網路建 構八種狀況下之變換車道模式,分別為:一般車流狀況下之變換車道行為、擁塞 下之變換車道行為、受測者前後 100 公尺以內至少有一車輛、受測者方 100 公尺 以內均無車輛、強迫性變換車道行為、選擇性變換車道行為、自由性變換車道行 為、不分類之所有資料。其考慮之變數與陳奕志類神經變換車道模式相同,其結 果得到所有模式中以受測者方 100 公尺以內均無車輛模式之均方差最低,但預測 力卻為最強,亦即倒傳遞網路較適用預測後方近距離無車之變換車道行為。擁塞 下之變換車道行為模式變異較少,因此預測能力較一般車流狀況下之變換車道行 為的預測能力好。 鐘炳煌[21]係以倒傳遞網路構建高速公路加速車道併入之行為模式,且仍採用 虛擬實境之技術蒐集資料,為了避免之前之 VR 技術無法取得鄰車道之後車相關資 料,鐘炳煌在駕駛模擬系統中加入中置及左側後視鏡,以求得鄰車道後車之相關 資料,使其模式更符合現況,其結果得到當駕駛者採取併入行為時,後車間距過. 21.
(32) 短出現的機率比前車間距高,除了顯示駕駛者對於本車與後車之掌控能力較差, 駕駛者亦有預期後車會有煞車之心理。而網路對於判斷併入之績效可達到 0.9730, 而對於不併入之判斷亦提昇至 0.9200,顯示類神經網路能有效地整合進口匝道所 有交通道路資訊,透過隱藏層之運作,產生高可靠度之資訊來輔助駕駛者。 4. 半間距模式 曹壽民[4]採用半間距觀念,構建強迫性變換車道行為模式,所謂半間距定義 為次車流車輛與主車流車輛通過交叉或併入區內特定參考點之時間間隔,該模式 以數學方式表示都市快速道路下匝道車變換車道之判斷準則如下式:. 圖 2. 5 下匝道車輛變換車道行為示意圖. tr − ta ≥ ha. (2-15). tb − tr ≥ hb. (2-16). 式中:. tr :下匝道車輛 R 通過參考點 Y 之時點(秒) ta :平面道路前車 A 通過參考點 Y 之時點(秒) tb :平面道路前車 B 通過參考點 Y 之時點(秒) ha :下匝道車輛與前車所需保持之最小安全車頭距(headway 秒) hb :下匝道車輛與後車所需保持之最小安全車頭距(headway 秒) 其模式預測下匝道車輛是否變換車道之正確率為 89%較臨界間距模式高。. 22.
(33) 2.2.2 變換車道行為 黃國平[17]對於車輛於市區道路之前推進,採用平面二維座標處理方法,因此 必須賦予前進中之車輛一最大可前進範圍與最大可偏向角度。在最大可偏向角度 乃是依照公路設計中計算車輛最小轉彎半徑計算式如下: V02 V02 R= = g ( f + e) 127( f + e). (2-17). 式中: R:轉彎半徑(公尺) g:重力加速度(9.81 公尺/秒平方) V:速度(公尺/秒) f:路面摩擦係數,當車輛行駛速度為 48KPH 時,值為 0.16 e:為超高 當求得車輛在不同速度下之最小轉彎半徑,再利用最小轉彎半徑求得車輛之 偏向角。 傅耀南[18]設定車輛無法以最大推進距離推進,且車速與願望速度相差 5m/sec 以上,此時相鄰車道之車速若大於現行車道速度,則考慮變換車道,且符合路寬 限制、前車限制、斜進角度小於最大偏向角及不影響後車前進四條件下,計算最 大斜進縱向距離,然後推進車輛。然而在最大偏向角方面,傅耀南使用美國交通 工程手冊的資料,以 LOTUS123 軟體求得車速與最大偏向角之關係式,使在模擬 時帶入車速,即可直接獲得偏向角。但此關係式指出車輛之最大偏向角會隨著車 速增加而遞減,故當車速過大時其求出之偏向角將會出現負值,李樑堅[16]則為避 免此現象發生,因而設定其偏向角最小值不可低於 100 。. θ s = 0.361748 − 0.02925V 式中:. 23. (2-18).
(34) θ s :汽車最大偏向角(弳度) V:速度(公尺/秒) 胡順章[20]利用調查高速公路實際變換車道行為微觀資料來探討,首先分析變 換車道行為之影響因素,發現車輛變換車道時之偏向角、加速度及減速度是變換 車道行為的主要因素,其中由資料統計可得知,車輛加速行為佔變換車道時間平 均約 59%,之後再以減速度方式繼續側移,直到完成變換車道。 在偏向角方面,胡順章利用多元迴歸求得如下式:. θ = 6.911 − 5.6453Db / Vi + 0.0024( Db ) 2. (2-19). ( R 2 = 0.765 ) 式中:. θ :偏向角(弧度) Db :前車車尾與本車車頭之距離(公尺)( Db <50m) Vi :本車車速(公尺/秒) 本車加速度方面,經由相關分析得出,對於影響本車的加速度最大因素為本 車與鄰近車道後車之時間間距,因此利用多元迴歸構建加速度模式,如下式:. Ai1 = 0.13927GAPina +. 0.90571 GAPina. (2-20). R 2 = 0.796 式中:. Ai1 :本車開始變換車道之加速度(公尺/秒平方) GAPina :本車與鄰近車道後車之時間間距(秒) 本車減速度方面,經相關分析得到本車減速度與鄰近車道前車車尾與本車車 頭之距離有較明顯的相關係數,並經多元迴歸分析得到減速度模式如下式:. 24.
(35) Ai 2 = 0.139 LOG ( Dnb ) −. 7.061 Dnb. (2-21). R 2 = 0.7582 式中:. Ai 2 :本車變換車道後段過程之減速度(公尺/秒平方) Dnb :鄰近車道前車車尾與本車車頭之距離(公尺) 經由以上之偏向角、加速度及減速度便可以得出變換車道之車輛於下一單位 時間之位置。 林宏達[15]認為胡順章在減速度模式之構建存在一不合理的現象,如鄰近車道 前車車尾與本車車頭之距離為 80 公尺時,鄰近車道前車與本車之蹤向安全距離為. 40 公尺,則依照胡順章之減速度模式所得到之加速度依然為減速,違反正常合理 狀況。因此,林宏達便以胡順章模式相同,變換車道期間前 60%過程中採等加速 度,並修正減速度模式(如式 22),然而胡順章模式在後段過程中係採用減速,而林 宏達模式則是假設為本車在變換車道後段過程為等速,其速度與鄰向車道前車相 同,模式如下: a1 = −. VV0 V 20 + 7.776 L (15.552) 2 L. (2-22). 式中:. a1 :本車開始變換車道之加速度(km/h/s) ,且為了舒適性考量, a1 最大只能等於 6(km/h/s)。. V0 :為變換車道時,本車與鄰道前車相對速度初始值(km/h) V :為變換車道時,本車速度初始值(km/h). tm :本車恰巧完成變換車道達 60%. 2.3 文獻評析 1. 傳統之車輛推進模擬模式,主要以跟車模式決定車輛與車輛間之距離,作為車. 25.
(36) 輛推進距離之依據,並以接受鄰車道間距之方式處理超車及變換車道行為,此 處理行為,在於不同模式間所採用之駕駛人反應時間不同,或接受間距、變換 車道時間之機率分配函數不同而已,其邏輯則極為相近。. 2. 在跟車行為方面,大部份跟車模式皆以 GM 跟車模式為基礎,但 GM 跟車模式 無法說明前後兩車之影響範圍,因此本研究將構建 GM 跟車模式門檻,改善. GM 跟車模式的缺失。 3. 變換車道決策方面,大部份之車流模擬模式,係以訂定變換車道原則做為變換 車道之決策模式,主要基於兩項決定因素,一為本車低於期望速度或高於前車 速度達某一特定值,另一為鄰車道是否達臨界間距,其原則之訂定過於僵固, 沒有彈性,其適用性有待進一步探討,後來有人利用類神經網路等方法來建立 變換車道模式,但其資料係以駕駛模擬器方法蒐集,較無真實性。. 4. 變換車道行為方面,車輛變換車道行為主要受到車輛變換車道偏向角及加速度 二項因素決定,偏向角方面,過去文獻說明偏向角主要是受到本車車速所影 響,但其研究範圍皆以市區道路車輛為主,其模式無法適用於高快速公路,故 本研究將就高快速公路變換車道之偏向角加以探討。在加速度方面,過去之研 究仍有不合乎現況,如胡順章加速度模式說明,車輛在變換車道之後段過程 中,一定會有減速行為,此與事實不符,因此本研究將就此加以深入探討。. 26.
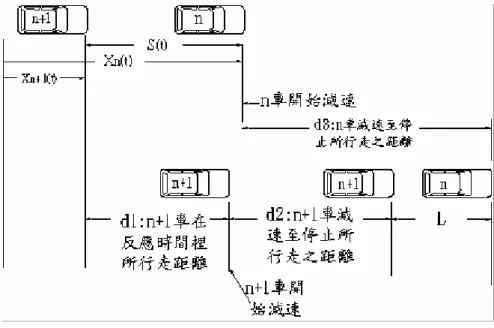
(37) 第三章 理論基礎與研究方法 3.1 理論基礎 3.1.1 微觀車流理論 在交通運輸領域中,車流理論乃是最先發展之理論基礎,過去研究主要乃著 重於微觀車流與巨觀車流,發展至今,近幾年已有學者提出中觀車流理論,以使 車流理論更臻成熟,然而巨觀車流理論乃探討整體車流特性,相較於巨觀車流理 論,微觀車流理論主要是探討車輛於道路上行駛時自身與車輛間相互影響之特 性,由分析個別車輛或個別車輛與其它車輛交互作用之運行特性對整體車流所造 成之影響,其中跟車理論為微觀車流理論之重要理論之一。 跟車理論是以模擬流體力學之理論,考慮流體在管道中之流動,其質點一個 接一個,且一個影響著一個,也就是說每一個運動質點緊跟著前一個質點而以其 與前一質點之特性而決定其運動方式,故其基本假設有下列數點:. 1.. 單一車道:以達管流之要求. 2.. 不准超車:需一部車尾隨一部車. 3.. 高密度:其間距能發揮影響效果,及車與車間能有受激反應之相互作用. 4.. 密度在小時段變化不大,以其均值代表此時段之密度. 5.. 速度在連續小車隊間變化不大,以其均值代表此小車隊之速度. 其於上面之假設,考慮第 n+1 部車尾隨第 n 部車行駛,如圖 3.1:. 27.
(38) 圖 3. 1 跟車模式示意圖 第 n+1 部車之反應係受第 n 部車之刺激及本身之敏感度之綜合影響,即. d2 = V. d1 = T × Vn +1 (t + T ). (3-1). (t + T ) / 2an +1 (t + T ). (3-2). 2 n +1. d3 = Vn2 (t ) / 2an (t ). (3-3). S (t ) = d1 + d 2 + L − d3 = X n (t ) − X n +1 (t ). (3-4). d 2 ≅ d3 (煞車性能一樣) X n (t ) − X n +1 (t ) = d1 + L = T × Vn +1 (t + T ) + L. (3-5). 1 [Vn (t ) − Vn+1 (t )] T. (3-6). 對 t 微分. an +1 (t + T ) =. n+1(反應)=n+1(敏感度) n(刺激) 其中,. Vn :第 n 部車之速度 Vn +1 :第 n+1 部車之速度 an :第 n+1 部車之加速度 an +1 :第 n 部車之加速度. 28.
(39) 3.1.2 運動學原理 運動學為物體運動力學分析之基本原理之一,其內容為探討物體運動之位 置、位移、速度、加速度,及運動規律,換言之,運動學係屬研究如何描述物體 運動,及其與各運動學量關係之學科,此外,由於運動學著重於突出物體運動軌 跡之表現,因此基本上運動學並未涉及使物體產生加速度或發生變形之力之探討。 直線運動方程式係運動學於道路上直線前進車輛運行狀態之描述,係指透過 時間、速度、位置、加速度間之關係式表現車輛行進過程因應遭遇道路交通環境 改變之加、減或等速度行駛情形。當道路上車輛以直線等加速度行駛時,將遵守 以下直線運動基本方程式:. V = V0 + at. (3-7). 1 S = V0t + at 2 2. (3-8). 2. V 2 = V0 + 2aS. (3-9). 其中, V = 物體之最終速度(公尺/秒). V0 = 物體之起始速度(公尺/秒) a = 物體之加速度值(公尺/秒平方) S = 物體之行經距離(公尺). S0 = 物體之起始位置(公尺) t = 物體運動過程所經過之時間(秒)。. 3.2 研究方法 本研究主要應用之研究方法有文獻評析法、統計迴歸分析法、攝影調查法、 實車測試法等。 3.2.1 文獻評析法 文獻評析法為一傳統探索性研究方法,即蒐集相關之研究論著,分析其研究. 29.
(40) 方法、結果與建議,以作為進一步研究之基礎,此種方式可協助初次從事某課題 之研究者,以避免缺乏理論與根據而致偏頗缺失。因此本研究藉由蒐集、分析國 內外等有關微觀車流模式等相關文獻,探究理論與內涵,以作為本研究之理論基 礎。 3.2.2 統計迴歸分析 迴歸分析係屬統計學中一種有用的分析方法,它利用一組獨立變數的數值, 對某一應變數做預測,也可以作為評估獨立變數對應變數的效用。迴歸分析亦分 為簡單之線性迴歸分析和複迴歸分析,其不同之處在於簡單線性迴歸之獨立變數 只有一個,僅以一個獨立變數去預測應變數的模式,而複迴歸則是討論多個獨立 變數對應變數的預測。 簡單線性迴歸通式如下:. Y = β 0 + β1 X 1. (3-10). Y = β 0 + β1 X 1 + β 2 X 2 + β 3 X 3 + ...... (3-11). 複迴歸之通式如下:. 式中之 β 0 、 β1 、 β 2 、 β 3 等參數,通常利用最小平方法估計求得。 3.2.3 攝影調查法 廣義的攝影是指通過攝影機,如電影、電視攝影機、照相機等,針對某一對 象、事物進行靜態或動態的拍攝,以瞭解該對象所表達之意象。於交通運輸領域 中,攝影調查往往應用於陸地運輸上,並針對某一特定道路或行人進行相關當地 之調查,欲利用攝影調查予以獲得相關資料,如車流或人流特性、駕駛者之駕駛 行為特性等,並利用調查資料分析探討可能發生之交通問題,以提出相關之解決 方案。一般來說,實地攝影調查主要的優點在於能調查實地資料,利用實際調查 而得的資料進行分析探討交通問題,並依據該交通問題予以提出適當之解決方 法,較一般學術研究而言解決實務之能力,亦具有其說服力。然而,對於交通運. 30.
(41) 輸領域而言,攝影調查之缺點則在於母體過大,對於每一個研究主題僅能調查某 一或某幾個特定樣本,具每一樣本又具地域性,隨著調查區域之相異,其攝影調 查結果可能因此而改變,故攝影調查資料可能因此而改變,故攝影調查資料僅能 對特定對象或區域具說服力,並無通用性,此為攝影調查法較為嚴重之缺點。 3.2.4 實車測試法 實車測試主要係因為利用攝影調查法無法得知駕駛者特性對於駕駛行為的影 響,因此藉由實驗設計,實際請駕駛者上路測試,並以儀器之測量所需資料,由 此我們便可得知駕駛者特性與駕駛者行為間之影響關係,以補攝影調查法之不足。. 31.
(42) 第四章 GM 跟車模式門檻及變換車道模式之構建 4.1 GM 跟車模式門檻之構建 所謂跟車(Car Following) 係描述在道路上行駛車輛間的相互關係,即是在研究 後車如何跟隨前車的行為,假設前車和跟隨車輛在行駛過程中,不斷地調整其行 車速度及間距,使其維持一安全距離,以便在發生突發事件時,跟隨車能夠及時 煞停而不致於與前車碰撞。一般研究公路駕駛行為跟車模式大都以 GM 跟車模式 為基礎加以構建,其模式基本理念皆在討論前後車間之速度及距離關係,但在使 用 GM 跟車模式尚有一缺點,因 GM 跟車模式有無論前車與後車距離多遠都會影 響後車之跟車行為,因此本研究以 GM 跟車模式之理念,構建跟車模式門檻,以 改善 GM 跟車模式之缺失。 4.1.1 資料蒐集 根據 GM 跟車模式之理念,當駕駛者受到本車與前車之相對速度之影響,而 造成本車有加減速之行為,則代表為跟車行為。然而我們無法由高速公路之車流 攝影資料來得知駕駛者在什麼樣的情況下有跟車行為,因此本研究則以實車測試 的方式,來蒐集駕駛者 GM 跟車門檻資料,本研究在此定義 GM 跟車門檻為駕駛 者開始受到本車與前車之相對速度之影響,而造成本車有加減速之行為時與前車 之相對距離。. 1. 受測者: 為了使其研究能夠符合大樣本原則,本研究邀請三十位駕駛者,符合領有駕 照四年以上,而且開車上路經驗豐富來參與實驗測試,然而參與本研究之實驗受 測者本應隨機抽樣方式產生,以避免偏誤,但因實際召募作業困難以及時間上之 限制,故本研究之受測者是從交通大學學生及親友挑選出。. 32.
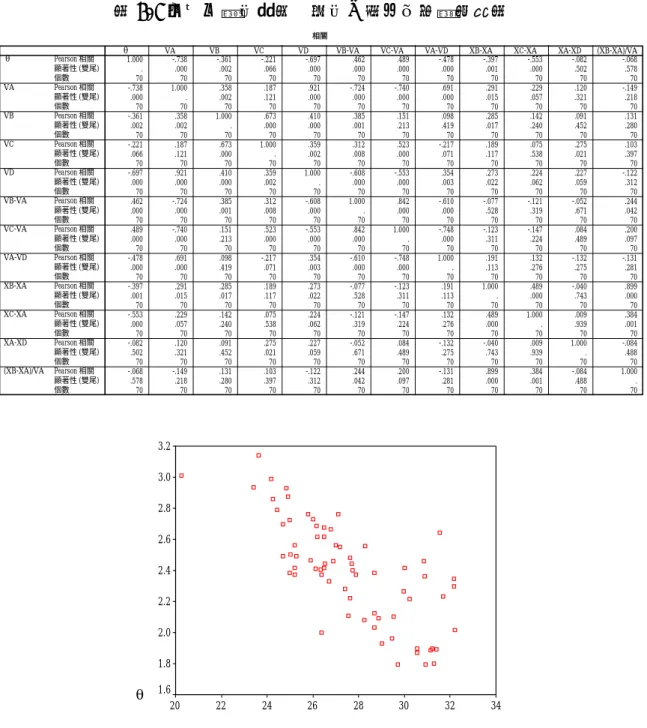
(43) 2. 研究人員: 本研究不包括受測者需要三位研究人員協助,其研究員工作分配如下: . 二位坐於受測車中,其中一位利用雷射測距測速器測量前後兩車之相對距 離。另一位則是負責記錄及聯繫前導車駕駛者。. . 二位坐於前導車中,其中一位負責駕駛前導車,另一位則負責與受測車聯 繫。. 3. 實驗裝備 (1) 實驗車二部: . NISSAN 2000c.c.(前導車). . TOYOTA 2000c.c(受測車). (2) 雷射測距測速器:PRO LASERIII,可用來測量前後兩車之相對距離 (3) 無線對講機二支:用來聯繫前後兩車之研究協助人員 3. 測試地點: 為了實驗安全及實驗過程中避免受到其它車輛之干擾,本研究選定一車流量少 及其性質與高速公路相似之完全出入管制快速道路。. 4. 實車測試內容: (1) 實車測試目的: 主要探討 GM 跟車模式前車對後車的影響距離範圍,因此,根據 CM 跟車模 式,當後車有跟車行為時,則會受到與前車之相對速度影響,而有加減速之反應。 a A (t0 + ∆t ) =. α. [ X B (t0 ) − X A (t0 )]. 其中,. α :敏感度參數 VA :本車速度. 33. [VB (t0 ) − VA (t0 )]. (4-1).
(44) VB :前車速度 X A :本車在位置 X B :前車位置 a A :本車之加速度 (2) 測試限制: . 受測者及前導車駕駛僅能以鬆油門方式減速。. . 受測者不能變換車道或超車。. . 根據國道中山高速公路及與高速公路性質相似之快速道路之速限,本研究將 前導車及受測車之起始受測速度定為 100km/h 及 90km/h 二種類型,並限制受 測者在路況允許的情況下,依照上述二種速度行駛(一般駕駛者在情況允許 下,會以速限做為期望速度)。. . 為了可以測量出受測者在何種距離下,會開始受到前導車速度影響,因此本 研究將前導車與受測車之起始距離定為 100 公尺以上,以確定受測車一開始 時,並沒有受到前導車之影響,並且依照期望速度行駛(100km/h 或 90km/h). (3) 測試步驟: . 在兩車保持 100 公尺以上,並且保持定速行駛(100km/h 或 90km/h)一段時間。. . 在保持定速一段時間後,前導車則開始減速,並減至與受測車之相對速度為. 10km/h 或 20km/h,其主要原因係本研究為了探討相對速度對於受測者開始受 到前導車影響之距離是否有影響。 . 測量受測者在何種距離下開始減速,研究員得知受測者開始減速係以受測者 開始減速時,會口頭告知測距研究員。. . 記錄受測者在何種距離下開始減速。. (4) 測試型態: . 兩車相距 100 公尺以上,並以時速 100km/h 行駛一段時間後,前導車開始減 速至 90km/h。. 34.
(45) . 兩車相距 100 公尺以上,並以時速 100km/h 行駛一段時間後,前導車開始減 速至 80km/h。. . 兩車相距 100 公尺以上,並以時速 90km/h 行駛一段時間後,前導車開始減速 至 80km/h。. . 兩車相距 100 公尺以上,並以時速 90km/h 行駛一段時間後,前導車開始減速 至 70km/h。 為了避免在實驗中發生危險,因此本研究便不考慮起始速度在 90km/h 以下之. 測試,另一主要原因則是在高速公路上,其行車速度大部份都在 90km/h 以上。 4.1.2 資料特性分析. 1. 相對速度對受測者 GM 跟車門檻值的影響: 首先本研究將利用統計方法,檢定受測者在起始受測速度分別為 100km/h 及. 90km/h 時,其前後車之相對速度是否對受測者 GM 跟車門檻值有所影響。 (1) 受測者在起始受測速度為 100km/h:. d1i − d 2i = di , i = 1, 2..30 d1i :相對速度 10km/h 之 GM 跟車門檻值 d 2i :相對速度 20km/h 之 GM 跟車門檻值. H 0 : µd = 0 H1 : µ d ≠ 0 t29 = 1.029 < t0.025,29. 由上可知,在顯著水準為0.05下,其相對速度對於受測者GM跟車門檻值的影 響並不顯著。. 35.
(46) (2) 受測者在起始受測速度為 90km/h:. d1i − d 2i = di , i = 1, 2..30 d1i :相對速度 10km/h 之 GM 跟車門檻值 d 2i :相對速度 20km/h 之 GM 跟車門檻值. H 0 : µd = 0 H1 : µ d ≠ 0 t29 = 1.534 < t0.025,29. 由上可知,在顯著水準為0.05下,其相對速度對於受測者GM跟車門檻值的影 響並不顯著。. 2. 車速對受測者GM跟車門檻值的影響: (1) 受測者在相對速度為 10km/h:. d1i − d 2i = di , i = 1, 2..30 d1i :起始速度 100km/h 之 GM 跟車門檻值 d 2i :起始速度 90km/h 之 GM 跟車門檻值. H 0 : µd = 0 H1 : µ d ≠ 0 t29 = 12.224 > t0.025,29. 由上可知,在顯著水準為 0.05 下,受測者當時車速對於受測者 GM 跟車門檻 值的影響有顯著關係。. 36.
數據
![圖 2. 3 跟車控制架構圖[15] CFIS 跟車模式解決了 GM 模式在目標車與座車之初始速度的不同而造成最 終安全跟車距離的不同之不合理現象,並也解決了 K&C 跟車模式在最終相對距 離會發生振盪之問題。並且在整個跟車過程中,滿足了合理、安全及舒適三大需 求。 3.應用類神經網路(Neural Network) 林鄉鎮[1]利用虛擬實境技術構建之駕駛模擬系統,來蒐集高速公路小汽車駕 駛者跟車資料,且發現除了以刺激-反應方程式中的三個變數外,跟車當時的車流 狀](https://thumb-ap.123doks.com/thumbv2/9libinfo/8689829.198189/25.892.206.768.118.745/大需求應用類神經網Neural林鄉鎮用虛擬實境技術構建之模擬系統來.webp)
+7
![圖 4. 12 僅有目標車道後車之變換車道加速度模式示意圖 然而我們在觀察駕駛者變換車道時,因為對於目標車道後車車速僅能由後照 鏡所得到,與對前車之速度感受有所差異,故本研究將式 4-7 增加一項參數 λ ,做 為駕駛者對於目標車道後車車速之感受調整因子,因此駕駛者變換車道加速度修 正如下: 當 V A X ( )t 0 − •λ V tD ( )0 ≤ 0, [ ]0 0 000()( ) ( )cos( )( )ADADa ttVtV tXtXtαλθ + ∆ = −−− •](https://thumb-ap.123doks.com/thumbv2/9libinfo/8689829.198189/64.892.179.790.115.345/為駕駛者對於目標車道後車車速之感受調整因子因此變換λ−.webp)
相關文件
• A delta-gamma hedge is a delta hedge that maintains zero portfolio gamma; it is gamma neutral.. • To meet this extra condition, one more security needs to be
Using the solution U of Riemann problem to obtain an e approximate solution for the solution U of balance laws..
Reading Task 6: Genre Structure and Language Features. • Now let’s look at how language features (e.g. sentence patterns) are connected to the structure
Promote project learning, mathematical modeling, and problem-based learning to strengthen the ability to integrate and apply knowledge and skills, and make. calculated
Wang, Solving pseudomonotone variational inequalities and pseudocon- vex optimization problems using the projection neural network, IEEE Transactions on Neural Networks 17
Define instead the imaginary.. potential, magnetic field, lattice…) Dirac-BdG Hamiltonian:. with small, and matrix
Monopolies in synchronous distributed systems (Peleg 1998; Peleg
Corollary 13.3. For, if C is simple and lies in D, the function f is analytic at each point interior to and on C; so we apply the Cauchy-Goursat theorem directly. On the other hand,
