Neural Network Forecast Model in Deep Excavation
J. C. Jan
1; Shih-Lin Hung, M.ASCE
2; S. Y. Chi
3; and J. C. Chern
4Abstract: Diaphragm wall deflection is an important field measurement in deep excavation. The monitoring data are applied to evaluate the construction performance to avoid a supporting system failure or damages incurred to adjacent structures. Despite the numerous case histories of construction projects and several forecasting methods, no method accurately forecasts the performance of construction due to the complicated geotechnical and construction factors affecting the behavior of the diaphragm wall. This work predicts the diaphragm wall deflection by using the adaptive limited memory–Broyden-Fletcher-Goldfarb-Shanno supervised neural network. Eighteen case histories of deep excavations with four to seven excavation stages are selected for training and verification. In addition, the knowledge represen-tation adopts measured wall deflections of previous excavation stages as inputs to the network. Doing so substantially reduces the importance of soil parameters, which are often extremely fluctuating and difficult to assess. Simulation results indicate that the artificial neural network can reasonably predict the magnitude, as well as the location, of maximum deflection of the diaphragm wall.
DOI: 10.1061/共ASCE兲0887-3801共2002兲16:1共59兲
CE Database keywords: Neural networks; Excavation; Geotechnical engineering; Sensitivity analysis; Algorithm; Diaphragm wall.
Introduction
In urban areas, braced diaphragm walls are generally applied to deep excavations in soft soil. A satisfactorily braced diaphragm wall not only provides for a safe excavation but also minimizes deformations in the surrounding ground, which are of utmost im-portance in avoiding costly damages to adjacent buildings. Obser-vational methods are frequently employed in deep excavation
projects to ensure safe construction. Peck 共1969b兲 first compiled
the observational data in deep excavations and tunneling in soft grounds. By adopting various construction methods, he
summa-rized the feasibility of excavations. Peck 共1969a兲 also
recom-mended the observational method not be adopted unless the de-signer has a plan of action for every unfavorable situation that may arise.
The estimation of lateral wall deflections and ground settle-ments has received substantial attention from practicing engineers and researchers. Finite element analyses are extensively applied to estimate wall deflections in deep excavations. Clough and
Hansen共1981兲 demonstrated how anisotropy clay affects braced
wall systems by performing finite element analyses. Powrie and
Li共1991兲 employed finite element analyses to investigate the ef-fects of soil/wall/prop stiffness and the preexcavation earth
pres-sure coefficient. Hashash and Whittle共1996兲 conducted a series of
numerical experiments, that applied nonlinear finite element analyses to investigate how the embedment length, support con-ditions, and stress history profile affect the undrained deforma-tions around a braced diaphragm wall in a deep excavation.
The accuracy of ground movement prediction through finite element analyses heavily depends on the constitutive behavior of the soil. The soil parameters applied in constitutive models are generally obtained from laboratory tests. However, the test results are often not representative of the in situ soil behavior due to factors such as sample disturbance, change of in situ environment and effects of construction. To minimize the effects of soil
param-eters and construction factors, Gioda and Sakurai共1987兲 proposed
back analysis procedures to obtain modified soil parameters through the fitting of computed wall deformations and field
mea-surements. For example, Whittle et al. 共1993兲 implemented a
fi-nite element analysis with an MIT-E3 soil model to simulate the top-down construction of a seven-story, underground parking ga-rage on Post Office Square in Boston, Mass. According to their results, soil deformation measurements provide valuable informa-tion on how to evaluate the constitutive model for describing soil behavior. In addition, several mathematical optimization ap-proaches have been utilized to determine modified soil
param-eters. Ou and Tang 共1994兲 employed optimization techniques to
determine soil parameters for finite element analysis in deep
ex-cavation. Chi et al.共1999兲 developed an information construction
approach for deep excavation. Their investigation applied an op-timization process to calculate back analyzed soil parameters, which were then used to predict the wall deflection of subsequent excavation stages. Although back analysis combined with finite element analysis provides an effective numerical approach for engineers to estimate wall deflections and surface settlements in excavations, the back analysis technique is limited to the number of soil parameters and the soil model applied.
Artificial neural networks共ANNs兲 form a class of systems that
are derived from biological neural networks. Learning is an im-portant feature of artificial neural networks. Several supervised 1PhD, Dept. of Civil Engineering, National Chiao Tung Univ., 1001
Ta Hsueh Rd., Hsinchu Taiwan 300, R.O.C.
2Associate Professor, Dept. of Civil Engineering, National Chiao Tung Univ., 1001 Ta Hsueh Rd., Hsinchu Taiwan 300, R.O.C. 共corre-sponding author兲. E-mail: [email protected]
3Researcher, Geotechnical Researcher Center, Sinotech Engineering Consultants, Inc., Basement No. 7, Ln. 26, Yat-Sen Rd., Taipei Taiwan 105, R.O.C.
4Manager, Geotechnical Researcher Center, Sinotech Engineering Consultants, Inc., Basement No. 7, Ln. 26, Yat-Sen Rd., Taipei Taiwan 105, R.O.C.
Note. Discussion open until June 1, 2002. Separate discussions must be submitted for individual papers. To extend the closing date by one month, a written request must be filed with the ASCE Managing Editor. The manuscript for this paper was submitted for review and possible publication on May 22, 2000; approved on January 3, 2001. This paper is part of the Journal of Computing in Civil Engineering, Vol. 16, No. 1, January 1, 2002. ©ASCE, ISSN 0887-3801/2002/1-59– 65/$8.00⫹$.50 per page.
and unsupervised neural network learning algorithms have been
developed and explored in a number of various domains 共Adeli
and Hung 1995; Haykin 1994兲. ANN learning models can effec-tively deal with qualitative, uncertain, and incomplete informa-tion. Therefore, ANN is highly promising for modeling compli-cated problems in which the governing equations are difficult to
define. Flood and Kartam共1994a,b兲 provided a discourse on the
understanding, usage, and potential for application of artificial neural networks in civil engineering. According to their study, artificial neural networks can be implemented in mapping, transi-tory, and optimization problems, as well as model dynamic pro-cesses. Based on supervised learning algorithms, several other researchers have applied neural network learning models in civil
engineering共Hajela and Berke 1991; Ghaboussi et al. 1991; Kang
and Yoon 1994; Stephen and Vanluchene 1994; Elkordy et al. 1994兲. In geotechnical engineering, Ni et al. 共1996兲 applied ANN
to evaluate failure potential of slopes, and Goh共1994兲 introduced
the application of neural networks to evaluate liquefaction
poten-tial. Juang et al. 共1999兲 presented a technique of training ANNs
with the aid of fuzzy sets theory. The technique involved modules for preprocessing input parameters and postprocessing network output. They indicated that the fuzzy set-based ANN models could be trained with greater efficiency.
This work attempts to predict the diaphragm wall deflection in deep excavation using a supervised limited
memory–Broydon-Fletcher-Goldfarb-Shanno共L-BFGS兲 ANN learning model 共Hung
and Lin 1994兲. The training data are collected from the construc-tion projects in the Taipei basin. For comparison, the convenconstruc-tional finite element analysis, which involves optimization back analysis to calculate soil parameters, is also applied to evaluate these dia-phragm wall deflections in deep excavation.
Artificial Neural Networks„ANNs…
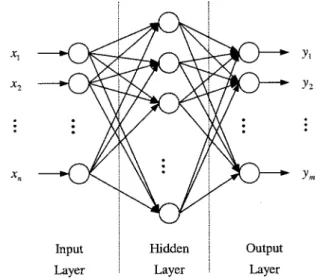
The ANNs form a class of systems that are derived from biologi-cal neural networks. The topology of an ANN model consists of a number of simple processing elements, called nodes, that are in-terconnected to each other. Interconnection weights that represent the information stored in the system are used to quantify the strength of the interconnections; these weights hold the key to the functioning of an ANN. ANNs have been used in a broad range of applications, including classification, pattern recognition, function approximation, optimization, prediction, and automatic control. Among the many different types of ANN, the feedforward, mul-tilayered, supervised neural network with the error
back-propagation共BP兲 algorithm, the so-called BP network 共Rumelhart
et al. 1986兲, is by far the most commonly applied neural network learning model owing to its simplicity. The architecture of BP networks, displayed in Fig. 1, consists of an input layer, one or more hidden layers, and an output layer.
Before an ANN can be used in the application, it needs to learn or be trained from an existing training set that consists of pairs of input-output elements. The training of a supervised neural net-work using BP learning algorithm usually involves two stages. The first stage is the data feed forward. The output of each node is defined as netj⫽
兺
i⫽1 n Wi joi⫹j (1) oj⫽ f共netj兲 (2)where Wi j⫽weight associated with the ith node in the preceding
layer to the jth node in the current layer; oi⫽output of ith node in
the preceding layer; j⫽threshold value of node j in the current
layer; oj⫽output of node j in the current layer; and function
f⫽activation function, which has to be differentiable. Herein, the sigmoid function is used as the activation function and is defined as
f共x兲⫽ 1
1⫹e⫺x (3)
The second stage is error back-propagation and adjustment of the weights through the network. In the training process, system error function is used to monitor the performance of the network. This system error function is defined as
E⫽1 2p
兺
⫽1 P兺
k⫽1 K 共dpk⫺opk兲2 (4)where P⫽number of instances in the training set; and dpkas well
as opk⫽desired and calculated output of the kth output node for the pth instance, respectively. The standard BP algorithm uses a
gradient descent approach with a constant step length 共learning
ratio兲 to train the network
Wi j共k⫹1兲⫽Wi j共k兲⫹⌬Wi j (5)
⌬Wi j⫽⫺
E Wi j
(6)
where⫽learning ratio, which is a constant in the range of 关0,1兴.
The superscript index k denotes the kth learning iteration. BP supervised neural network learning models, however, al-ways take a long time to learn. Moreover, the convergence of a
BP neural 共BPN兲 network is highly dependent upon the use of a
learning rate, . Thus, several different approaches developed to
enhance the learning performance of the BP learning algorithm have been applied. One approach is to develop more effective learning algorithms with the objective of reducing the learning
time. Moller共1993兲 developed a scaled conjugate gradient
algo-rithm for fasting the supervised learning. Adeli and Hung共1994兲
developed an adaptive conjugate gradient neural network
共Ad-CGN兲 learning algorithm and applied it to structural engineering.
Sanossian and Evans共1995兲 used a gradient range-based heuristic
method for accelerating neural network. Another approach is to develop a parallel algorithm on multiprocesser computers with the objective of reducing the overall computing time. For
in-Fig. 1. Feedforward network with one hidden layer
stance, Adeli and Hung 共1993兲 presented a concurrent Ad-CGN learning algorithm to a large-scale pattern recognition problem. Significant improvement for the BPN algorithm in computing time was reported in their work. The third approach is the devel-opment of hybrid neural network learning algorithms. Hung and
Adeli 共1994兲 presented a parallel hybrid genetic/neural network
learning algorithm. They reported a superior convergence prop-erty of the parallel hybrid neural network learning algorithm as compared with a BPN learning algorithm. Besides, the perfor-mance of neural networks in engineering applications can be sig-nificantly improved by selecting a suitable representational
frame-work to present the training input/output pattern pairs.
Gunaratnam and Gero共1994兲 discussed the effect of
representa-tion of input/output pairs for training instances on the learning performance of the BPN learning algorithm in the problems of structural design. The dimensionless representation is reported to result in a simpler mapping function and makes it possible to train network on a small training set and still have the capability for reasonable accurate predictions.
Hung and Lin 共1994兲 developed a more effective adaptive
L-BFGS learning algorithm based on the approach of a L-BFGS
quasi Newton second-order method共Nocedal 1980兲 with an
inex-act line search algorithm. In the conventional BFGS method, the
approximation Hk⫹1 to the inverse Hessian matrix of function
E(W) is updated by Hk⫹1⫽共I⫺kskyk T兲 Hk共I⫺kyksk T兲⫹ ksksk T⬅V k T HkVk⫹ksksk T (7) where k⫽1/yk Ts k; Vk⫽I⫺kyksk T; s k⫽Wk⫹1⫺Wk; yk⫽gk⫹1
⫺gk; and gk⫽E/W. Instead of forming the matrix Hk in
BFGS method, we save the vectors sk and yk. These vectors first
define and then implicitly and dynamically update the Hessian approximation using information from the last few iterations, say m in the work. Therefore, the final stage of the adjusting weights in a BP-based ANN is modified as
W共k⫹1兲⫽W共k兲⫹␣
kdk (8)
The search direction is given by
dk⫽⫺Hkgk⫹kdk⫺1 (9)
wherek⫽关y(kT⫺1)H(k⫺1)g(k⫺1)/关y(kT⫺1)d(k⫺1)兴
The step length ␣k is adapted during the learning process
through a mathematical approach—the inexact line search algo-rithm. This is used in the L-BFGS learning algorithm instead of a
constant learning ratio 共Hung and Lin 1994兲. The inexact line
search algorithm is based on three sequential approaches— bracketing, sectioning, and interpolation. The bracketing
ap-proach brackets the potential step length,␣, between two points,
through a series of function evaluations. The sectioning approach then uses the two points of the bracket as the initial points, reduc-ing the step size piecemeal, and locatreduc-ing the minimum between
points, e.g.,␣1 and␣2, to a desired degree of accuracy. Finally,
the quadratic interpolation approach uses the three points, ␣1,
␣2, and (␣1⫹␣2)/2, to fit a parabola to determine the step length,
␣k. Consequently, the step length ␣k is required to satisfy the
following conditions in each iteration共Hung and Lin 1994兲:
E共Wk⫹␣kdk兲⭐E共Wk兲⫹␣k关ⵜE共Wk兲Tdk兴;
苸共0,1兲 and ␣k⬎0 (10)
ⵜE共Wk⫹␣kdk兲Tdk⭓关ⵜE共Wk兲Tdk兴;
苸共,1兲 and ␣k⬎0 (11)
ⵜE共Wk⫹␣kdk兲Td共k⫹1兲⬍0 (12) Hence, the problem of trial and error selection of a learning ratio in the BP algorithm was circumvented in the adaptive L-BFGS learning algorithm.
Knowledge Representation of Wall Deflection Problem
Deep excavations are widely conducted in the construction of underground structures and the foundations of high-rise buildings. Therefore, a large amount of monitoring data has been accumu-lated. However, due to the complexity of factors that affect the behavior of deep excavation, the information cannot be applied effectively to solve new problems. Herein, supervised ANN with adaptive L-BFGS learning models are adopted to accurately pre-dict the diaphragm wall deflections employing accumulated moni-toring data. The measurement data and wall deflections from deep excavations, are collected for training purposes. The underlying notion of applying ANN model to predict staged construction problems is that during an excavation, an accurate prediction of the succeeding stage can be derived from the information of two or more previous stages as input to the network. In doing so, the causes and effects of factors that determine the behavior of the modeled problems do not need to be fully understood.
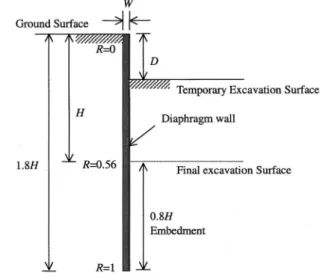
Fig. 2 depicts a wall structure system, where the wall length is assumed to be 1.8 times the final excavation depth, H; R, an index of the observation point, is the normalized depth of the measuring point; and W and D denote the thickness of the diaphragm wall and the depth of the current excavation, respectively. Combining the aforementioned terms with monitored data, each instance con-sists of seven inputs and one output.
Inputs
• Wall thickness: W
• Depth of excavation surface: D
• Equivalent SPT-N value between the depth of D⫺0.25H and
D⫹0.25H: N¯
• Index of observation point: R
• Wall deflection of observation point in (i⫺3)th excavation
stage:⌬Ri⫺3
Fig. 2. Illustration of diaphragm wall structure
• Wall deflection of observation point in (i⫺2)th excavation
stage:⌬Ri⫺2
• Wall deflection of observation point in (i⫺1)th excavation
stage:⌬Ri⫺1
Output
Wall deflection of observation point in ith excavation stage⌬Ri .
Notably, in these instances, if i equals 1,⌬Ri⫺1,⌬Ri⫺2and⌬Ri⫺3are
zero; if i equals 2,⌬Ri⫺2and⌬Ri⫺3are zero; and if i equals 3,⌬Ri⫺3
is also zero.
In this study, 18 case histories of deep excavation with 4 –7 excavation stages each, resulting in a total of 93 sets of wall deflection, are used to establish the instance base. Each dia-phragm wall is discretized into 18 uniform subintervals with 19
nodal points. Therefore, a total of 1,767 共93⫻19兲 instances are
generated and employed to train and verify the learning perfor-mance of the network.
Computational Results
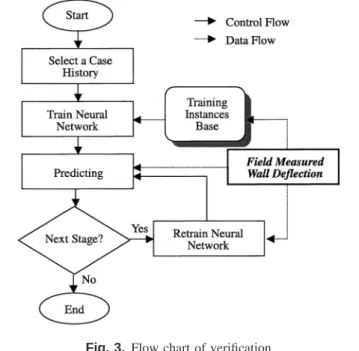
A hidden layer feed-forward network with 7 input nodes, 15 hid-den nodes, and 1 output node was used to solve the diaphragm wall deflection problem. Fig. 3 displays the flow chart of the verification process, as summarized in the following:
1. Select a case history for verification;
2. Train the neural network with other case histories;
3. Predict the wall deflection of subsequent excavation stage;
4. After the excavation stage is completed, append the
mea-sured wall deflection of the excavation stage to the training instances;
5. Retrain the neural network; and
6. Repeat Steps 3–5 until the prediction is complete.
The 18 case histories of deep excavation in the Taipei Basin are sequentially used to verify the prediction accuracy of a neural
network. Herein, only the third to seventh excavation stages 共57
sets of wall deflection兲 are of concern, because engineering fail-ures seldom occur in the first and second excavation stages.
Hence, a total number of 1,083共57⫻19兲 instances are adopted for
verification. Fig. 4 presents the forecasted maximum deflections of the 57 sets of wall deflection. The correlation coefficient be-tween predicted and measured maximum wall deflections is 0.9081. The number of cases with relative error of predicted
maximum wall deflection in the range of关0,10%兴, 关10,20%兴, and
greater than 20% are 28, 16, and 13, respectively. If we define that the prediction is failed as the relative percentage error ex-ceeds 20, then 77% of cases are acceptable predictions.
Furthermore, the average error of wall deflection for all veri-fication instances is 5.3 mm. The average error of the seven larg-est deflection points of each excavation stage of case histories is 6.4 mm. The average error of wall deflection of embedded points is 4.8 mm. As a result, the largest prediction error occurs near the maximum wall deflection nodal point. Additionally, for maximum wall deflection, 38.6% of computed case histories occur at the same nodal point, as compared with measured case histories; 49.1% of maximum wall deflection of computed case histories are only inaccurate by one nodal point. These results imply that more than 87% of the predicted maximum deflection point is less than one nodal point from the observed location. Furthermore, the wall shape of predicted wall deflection resembles that of the measured wall deflection.
For comparison, the finite element analysis involving optimi-zation back analysis calculating soil parameters, proposed by Chi
et al.共1999兲, is employed as a reference. The hyperbolic
stress-strain relationship and Mohr-Coulomb plasticity are adopted for the soil model. Four most important soil parameters are obtained by optimization back analysis calculation. The four soil param-eters are the ratio of Young’s modulus of clay over undrained shear strength, the ratio of Young’s modulus of sand over SPT-N, the variation of undrained shear strength, and the undrained shear strength at ground level.
Three excavation projects are adopted to compare the compu-tational performances of ANN prediction model and the reference approach. Both Cases A and B applied a 0.6-m thick diaphragm wall, however, the depths of the wall were 23 and 21.5 m, respec-tively. Furthermore, the walls were constructed with the bottom-up construction method. The third case, Taipei National
Enterprise Center 共TNEC兲 Case, is the construction project in
Taiwan. Ou et al. 共1998兲 studied this case, and Chi et al. 共1999兲
investigated optimization of back analysis by incorporating it into a finite element analysis. Case TNEC used a 0.9-m thick and 35-m depth diaphragm wall as the earth-retaining structure. Dif-fering from the other cases, however, a top-down construction method was applied.
Fig. 3.Flow chart of verification
Fig. 4. Computational results of predicted maximum wall deflection
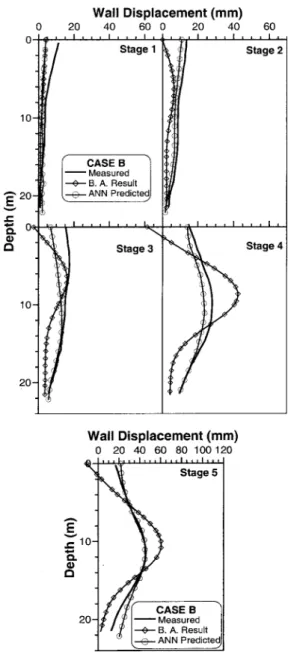
Figs. 5共a and b兲 depict the back analysis results and ANN prediction model of Case A, where the back analysis results are curve fittings rather than predictions of measured wall deflections. According to these figures, the optimization back analysis has acceptable convergence in fitting measured wall deflections. Also, the ANN model performs acceptable predictions. Similarly, Figs. 6共a and b兲 illustrate the back analysis results and ANN prediction model of Case B. The optimization back analysis in this case has a poor convergence in fitting measured wall deflections. For ex-ample, the magnitudes of maximum wall deflections of excava-tion stages 4 and 5 are visibly larger than the measured results, and the deflection shapes of excavation stages 3, 4, and 5 are markedly dissimilar to the measured wall deflections. However, the predicted wall deflections from the ANN model are accept-able.
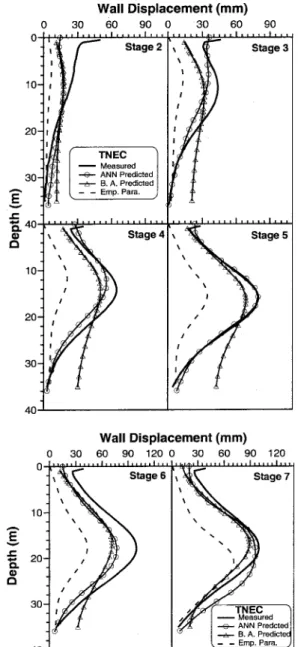
In Case TNEC, the back analyzed soil parameters from previ-ous excavation stages are applied for finite-element analysis to predict wall deflections of the subsequent excavation stage. In
doing so, the prediction begins at the second excavation stage. For comparison, soil parameters based on local empirical formu-las are also employed herein. Figs. 7共a and b兲 display the com-puted wall deflections from ANN prediction model and the finite-element analysis. The ANN model gives acceptable prediction of wall deflections, except for excavation stages 2 and 3. Analysis results obtained from finite-element analysis, based on local em-pirical formulas, markedly differ from those of measured wall deflection in all excavation stages. In addition, analysis results obtained from the finite-element analysis, using back analyzed soil parameters, satisfactorily predict the maximum wall deflec-tion except for excavadeflec-tion stages 2 and 3. However, the predicted wall deflections of the embedded points are inaccurate except for excavation stages 2 and 7.
Sensitivity Analysis
After an ANN model is successfully trained, the relative strength of effect for input element on output data can be derived based on Fig. 5. 共a兲 Back analysis results and artificial neural network 共ANN兲
prediction of case A共excavation stages 1–4兲 and 共b兲 Back analysis results and ANN prediction of case A共excavation stage 5兲
Fig. 6. 共a兲 Back analysis results and artificial neural network 共ANN兲
prediction of case B 共excavation stages 1–4兲 and 共b兲 Back analysis results and ANN prediction of case B共excavation stage 5兲
the weights stored in the network 共Yang and Zhang 1997兲. This
work adopted an importance index, Iik, to express the degree of
sensitivity for each input parameter xi on one of data in output
ok. Hereinafter, the process of sensitivity analysis is summarized
as follows:
1. ABP-based ANN model has been successfully trained. The
computed output for any node then can be yielded through the network and expressed as
ok⫽f共netk兲, netk⫽
兺
jn ojnWjn,k⫹k (13) ojn⫽f共netjn兲, netjn⫽兺
jn⫺1 ojn⫺1Wjn⫺1,jn⫹jn (14) ] 共15兲 oj1⫽f共netj1兲, netj1⫽兺
i xiWi,j1⫹j1where xiis ith input parameter; and ok, ojn, and oj1 denote
the computed output for output node j, hidden node jn, and
input node j1, respectively.
2. The variance of output with the change of each input
param-eter can be derived. The variance is represented by the fol-lowing differential equation:
ok xi⫽ ok netk netk oj . . .neti xi ⫽
兺
jn j兺
n⫺1 . . .兺
j1 关Wjnkf⬘共netk兲Wjn⫺1jn ⫻ f⬘共netjn兲. . . Wi j1f⬘共netj1兲兴 (16)where jn, jn⫺1, . . . , and j1denote hidden nodes in the nth,
(n⫺1)th, . . . , and first hidden layer, respectively; Wjnk
de-notes weight between the kth output node and hidden node
jn; Wjn⫺1jn denotes weight between the hidden nodes jn⫺1
and jn; Wi j1denotes weight between the ith input node and
the hidden node j1; netk, netjn and netj1 denote weighted
sums of kth output node, the hidden node jnand j1,
respec-tively; and f⬘ denotes differential function of the activation
function f.
3. The total variance of training instances as a temporary
vari-able Tikof xiand ok Tik⫽
兺
p冏
冉
ok xi冊
p冏
(17) where p denotes pth training instances.4. The importance index, Iik, of input parameter xi to output
data ok, therefore, can be calculated as
Iik⫽ Tik Tmax
(18)
where Tmaxis maximum sum of variance.
If the network converges, the terms Iik for each instance also
converge to constants. Obviously, a large value of Iik indicates
more effect on the output data. A positive value of Iikimplies the
positive relation; i.e., the change of output data is proportional to the change of input variable. On the other hand, a negative value
of Iik specifies negative action. The output data have no relation
with the input variable when their Iik equals zero. Herein, the
importance indexes for each input, W, D, N¯ , R, ⌬Ri⫺3,⌬Ri⫺2and
⌬R
i⫺1, to the output,⌬
R
i , are derived via the aforementioned
sen-sitivity analysis process. They are 0.3204, 0.121, 0.1313, 0.173, 0.271, 0.3759, and 1, respectively. Revealed from these results,
the input parameters D, N¯ , and R have little influence in the
prediction of the diaphragm wall deflection. Alternately, the wall deflection in the last excavation stage is the most important factor for the prediction. Restated, incorporating the previous excavation stages into the knowledge representation, which reflects both the soil and construction factors for the case to be predicted, has an important effect on the ANN prediction model.
Conclusions
In this work, the adaptive L-BFGS supervised neural network was applied to predict the diaphragm wall deflection of deep excava-tions. Training data were collected from the construction projects in the Taipei Basin. To compare, the conventional finite element analysis involving optimization back analysis calculating soil pa-rameters is also applied to evaluate these diaphragm wall deflec-tions in deep excavation. The conclusions are summarized as fol-lows:
Fig. 7.共a兲 Comparison of back-analysis and artificial neural network
共ANN兲 predictions of the case of the Taipei National Enterprise
Cen-ter 共TNEC兲 共excavation stages 2–5兲 and 共b兲 Comparison of back
analysis and ANN predictions of case TNEC共excavation stages 6 and 7兲
1. This study presents a neural network prediction model for deep excavation in geotechnical engineering to assess the safety of retaining systems during construction. Due to the historical information that is gathered during excavations, the limitation of understanding cause and effect, which in turn determines the behavior of the obstacles being modeled, is avoided. The advantage of the ANN prediction model is that it does not require a rigorous understanding of cause and effect. Moreover, the soil models are not significant to the predictions of wall deflections in deep excavations as com-pared with other factors.
2. In deep excavations, the artificial neural network can
reason-ably predict the magnitude as well as the location of maxi-mum deflection of diaphragm wall. In addition, reliable pre-dictions on wall deflections in the embedded position are also achieved. These results imply that the shape of the pre-dicted wall matches that of the measured wall. As a result, neural network prediction allows engineers to estimate the wall structure system prior to the next excavation stage.
3. Input wall deflections of the three previous excavation stages
provides a more accurate prediction of the ensuing excava-tion stage. Also, as compared with other convenexcava-tional ap-proaches, the importance of soil parameters is markedly re-duced. The simulation results indicate that the monitoring data involving various information reflects both the uncer-tainty and the construction factors of field situations.
Acknowledgment
The writers would like to thank the Sinotech Engineering Con-sultants, Inc. of the Republic of China for financially supporting this research under Grant No. SEC/R-GT-99-01.
References
Adeli, H., and Hung, S. L. 共1993兲. ‘‘A concurrent adaptive conjugate gradient learning algorithm on MIMD shared memory machine.’’ J. Supercomp. Appl., 7共2兲, 155–166.
Adeli, H., and Hung, S. L.共1994兲. ‘‘An adaptive conjugate gradient learn-ing algorithm for effective trainlearn-ing of multilayer neural networks.’’ Appl. Math. Comput., 62共1兲, 81–102.
Adeli, H., and Hung, S. L.共1995兲. Machine learning—Neural networks, genetic algorithms, and fuzzy systems, Wiley, New York.
Chi, S. Y., Chern, J. C., and Wang, C. C.共1999兲. ‘‘Information construc-tion approach for deep excavaconstruc-tion.’’ Proc., Int. Symposium Geotech-nical Aspects of Underground Construction in Soft Ground, Balkema, Rotterdam, The Netherlands, 471– 476.
Clough, G. W., and Hansen, L. A.共1981兲. ‘‘Clay anisotropy and braced wall behavior.’’ J. Geotech. Eng., 107共7兲, 893–913.
Elkordy, M. F., Cheng, K. C., and Lee, G. C.共1994兲. ‘‘A structural dam-age neural network monitoring system.’’ Microcomput. Civ. Eng., 9共2兲, 83–96.
Flood, I., and Kartam, N.共1994a兲. ‘‘Neural networks in civil engineering. I: Principles and understanding.’’ J. Comput. Civ. Eng., 8共2兲, 131– 148.
Flood, I., and Kartam, N.共1994b兲. ‘‘Neural networks in civil engineering II: principles and understanding.’’ J. Comput. Civ. Eng. 8共2兲, 149– 162.
Ghaboussi, J., Garrett, J. H., and Wu, X. 共1991兲. ‘‘Knowledge-based modeling of material behavior and neural networks.’’ J. Eng. Mech. 117共1兲, 132–153.
Gioda, G., and Sakurai, S. 共1987兲. ‘‘Back-analysis procedures for the
interpretation of field measurements in geomechanics.’’ Int. J. Numer. Analyt. Meth. Geomech., 11, 555–583.
Goh, A. T. C.共1994兲. ‘‘Seismic liquefaction potential assessed by neural networks.’’ J. Geotech. Eng., 120共9兲, 1467–1480.
Gunaratnam, D. J., and Gero, J. S.共1994兲. ‘‘Effect of representation on the performance of neural networks in structural engineering applica-tions.’’ Microcomput. Civ. Eng., 9共2兲, 97–108.
Hajela, P., and Berke, L.共1991兲. ‘‘Neurobiological computational modes in structural analysis and design.’’ Computers and Struct., 41共4兲, 657– 667.
Hashash, Y. M. A., and Whittle, A. J.共1996兲. ‘‘Ground movement pre-diction for deep excavations in soft clay.’’ J. Geotech. Eng., 122共6兲, 474 – 486.
Haykin, S.共1994兲. Neural networks—A comprehensive foundation, Mac-millan, New York.
Hung, S. L., and Adeli, H. 共1991兲. ‘‘A hybrid learning algorithm for distributed memory multicomputers.’’ Heuristic-The J. Knowledge Eng., 4共4兲, 56–68.
Hung, S. L., and Adeli, H. 共1994兲. ‘‘A parallel genetic/neural network learning algorithm for MIMD shared memory machines.’’ IEEE Trans. Neural Netw., 5共6兲, 900–909.
Hung, S. L., and Lin, Y. L. 共1994兲. ‘‘Application of an L-BFGS neural network learning algorithm in engineering analysis and design.’’ Proc., 2nd National Conf. on Structural Engineering, Chinese Society of Structural Engineering, Taiwan, R.O.C.共in Chinese兲.
Juang, C. H., Ni, S. H., and Lu, P. C.共1999兲. ‘‘Training artificial neural networks with the aid of fuzzy sets.’’ Microcomput. Civ. Eng., 14共6兲, 407– 415.
Kang, H.-T., and Yoon, C. J.共1994兲. ‘‘Neural network approaches to aid simple truss design problems.’’ Microcomput. Civ. Eng., 9共3兲, 211– 218.
Moller, M. F. 共1993兲. ‘‘A scaled conjugate gradient algorithm for fast supervised learning.’’ Neural Networks, 69, 525–533.
Ni, S. H., Lu, P. C., and Juang, C. H.共1996兲. ‘‘A fuzzy neural network approach to evaluation of slope failure potential.’’ Microcomput. Civ. Eng., 11共2兲, 59–66.
Nocedal, J. 共1980兲. ‘‘Updating quasi-Newton matrix with limited stor-age.’’ Math. Comput., 35, 20–33.
Ou, C. Y., Liao, J. T., and Lin, H. D.共1998兲. ‘‘Performance of diaphragm wall constructed using top-down method.’’ J. Geotechnical and Geoenvironmental Eng., 124, 798 – 808.
Ou, C. Y., and Tang, Y. G.,共1994兲. ‘‘Soil parameter determination for deep excavation analysis by optimization.’’ J. Chin. Inst. Eng., 17共5兲, 671– 688.
Peck, R. B. 共1969a兲. ‘‘Advantages and limitations of the observational method in applied soil mechanics.’’ Geotechnique, 19共2兲, 171–187. Peck, R. B.共1969b兲. ‘‘Deep excavations and tunneling in soft ground.’’
Proc., 7th Int. Conf. Soil Mechanics and Foundation Engineering, Univ. Nacional Autonoma de Mexico Instituto de Ingenira, Mexico City, 225–290.
Powrie, W., and Li, E. S. F.共1991兲. ‘‘Finite element analysis of an in situ wall porpped at formation level.’’ Geotechnique, 41共4兲, 499–514. Rumelhart, D., Hinton, G., and Williams, R.共1986兲. ‘‘Learning
represen-tations by back-propagation errors.’’ Parallel distributed processing, Vol. 1, D. Rumelhart et al., eds., MIT Press, Cambridge, Mass., 318 – 362.
Sanossian, H. Y., and Evans, D. J.共1995兲. ‘‘Gradient range-based heuris-tic 共GRBH兲 method for accelerating neural network convergence.’’ Integrated Comp.-Aided Eng., 2共2兲, 147–152.
Stephen, J. E., and Vanluchene, R. D.共1994兲. ‘‘Integrated assessment of seismic damage in structures.’’ Microcomput. Civ. Eng., 9共2兲, 119– 128.
Vanluchene, R. D., and Sun, R. 共1990兲. ‘‘Neural networks in structural engineering.’’ Microcomput. Civ. Eng., 5共3兲, 207-215.
Whittle, A. J., Hashash, Y. M. A., and Whitman, R. V.共1993兲. ‘‘Analysis of deep excavation in Boston.’’ J. Geotech. Eng., 119共1兲, 69-90. Yang, Y., and Zhang, Q. 共1997兲. ‘‘A hierarchical analysis for
rockengi-neering using artificial neural networks.’’ Rock Mech. and Rock Eng., 30共4兲, 207–222.