國立交通大學
電控工程研究所
碩士論文
旋轉敲擊式壓電發電機之阻抗匹配轉換器之設計與實現
Design and Implementation of Impedance Matching Converter for
Piezoelectric Generator in Rotating Tapping Mode
研究生 : 陳威志
指導教授 : 林錫寬 博士
i
旋轉敲擊式壓電發電機之阻抗匹配轉換器之設計與實現
Design and Implementation of Impedance Matching Converter for
Piezoelectric Generator in Rotating Tapping Mode
研究生 : 陳威志 Student : Wei-Chih Chen 指導教授 : 林錫寬 博士 Advisor : Dr.Shir-Kuan Lin
國 立 交 通 大 學 電控工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical Control Engineering
National Chiao Tung University In Partial Fulfillment of the Requirements For the Degree of
Master of Engineering in
Electrical and Control Engineering June 2009
Hsinchu, Taiwan
ii
旋轉敲擊式壓電發電機之阻抗匹配轉換器之設計與實現
研究生:陳威志 指導教授:林錫寬博士
國立交通大學電控工程研究所
摘要
本論文為設計一個旋轉敲擊模式的壓電發電機,並結合阻抗匹配轉換器來達 到輸出功率的最佳化,旋轉敲擊模式的概念是利用轉動的機構帶動齒輪敲擊懸臂 樑式壓電片來發電,例如:腳踏車,電風扇...等,本研究使用步進馬達來取 代轉動的機構,步進馬達的控制器有數種操作模式,操作方便。壓電材料的最佳 輸出功率與負載有很大的關係,阻抗匹配轉換器可視為一個等效負載,因此透過 調整轉換器的阻抗值可以達成輸出功率的最佳化,阻抗匹配轉換器為升降壓型轉 換器,升降壓型轉換器為直流對直流轉換器的一種,轉換器在設計上必須操作於 不連續導通模式才能有阻抗匹配的功能,本文設計了一個低功率的脈波寬度調整 (pulse-width modulation,PWM)產生器,此電路可以改變脈寬的責任周期來達 到不同操作模式下的阻抗匹配。 本文設計了兩種實驗範例來驗證阻抗匹配轉換器的功能,實驗顯示脈寬調變 產生電路耗電量極低,改變脈寬的責任周期的確可改變等效負載的阻抗值,轉換 器可產生16.18K~39.2K 廣泛的阻抗匹配,轉換器效率在 600(pulses per second) pps 和 400pps 操作模式下都有 77.9%以上,等效負載輸出功率的效率 600pps 和400pps 操作模式下都有 75.3%以上,壓電發電機在操作模式 600pps 下輸出 功率可達391uW, 應用方面可以儲存於 2.4V 充電電池中或 LED 閃爍燈。iii
Design and Implementation of Impedance Matching Converter for
Piezoelectric Generator in Rotating Tapping Mode
Student: Wei-Chih Chen Advisor: Dr.Shir-Kuan Lin
Submitted to Institute of Electrical Control Engineering National Chiao Tung University
ABSTRACT
The thesis presents a piezoelectric generator operated in rotating tapping mode and combined with impedance matching converter to achieve optimal power output. The concept of rotating tapping mode is the use of rotating bodies let gear to tap cantilever-type piezoelectric film to generate power. Such as: bicycle, electric fan ... and so on. The thesis used stepper motor to replace the rotation of the body. The stepper motor controller has several operating mode, and it’s convenient to operate. The optimal power output of piezoelectric materials has a great relationship with the load. Impedance matching converters can be regarded as an equivalent load and by adjusting the impedance of the converter can achieve optimal power output. Impedance converter is a buck-boost converter and it’s one kind of the DC/DC converter. In order to have impedance matching function, the converter must operate in discontinuous conduction mode. The thesis design of a low-power ( pulse width modulation, PWM) generator. This circuit can modulate the width of the duty cycle to achieve impedance matching in different operation modes.
The thesis design two experimental examples to verify the impedance matching function of the converter. Experimental result shows the power consumption of pulse width modulation circuit is extremely low. Changes in pulse duty cycle can indeed change the equivalent load impedance. The converter can produce 16.18 K ~ 39.2K wide range of impedance matching. The efficiency of converter in 600(pulses per second)pps and 400pps operating mode has more than 77.9%. The output power efficiency of equivalent load in 600pps and 400pps operating mode has more than 75.3%. The output power of piezoelectric generator in 600pps is 391μW, applications can be stored in 2.4V rechargeable battery or LED flashing lights.
iv
誌 謝
非常感謝我的指導教授林錫寬老師,在兩年的研究所生活中,給予我許多 的意見與指導,讓我在這兩年中,不管是在知識的累積還是為人處事的態度都有 所成長,也感謝老師提供完善的實驗室資源,使本研究可以順利完成。其次非常 感謝趙昌博教授,林法正教授,王明賢教授,能在百忙之中來幫我進行論文口試, 也感謝各位老師對本論文的建議與指正,以及對我個人的勉勵。 感謝九鼎金屬的王世杰博士,在研究上也給予了我很多建議,感謝和勇科技 邵志良老闆,協助我設計與製造實驗機構,感謝博士班林資程學長、吳建鋒學長, 同學元亨、宗德、千綬、家振,學弟俊逢、富順,以及交大電控系足的夥伴們, 因為有了你們,使得我的研究生活不無聊,更加的多采多姿。 感謝我的爸爸媽媽,在這段期間內給我的鼓勵與關懷,以及給我很好的學習 環境,讓我可以專心在研究上,另外也感謝我的女友秋貞的陪伴與支持。在此僅 以本文獻給我的家人、女友、朋友與其他幫助我的各位師長,特別是在天國的奶 奶,願將我這份喜悅與你們分享。
陳威志
謹識
99 年 6 月 29 號
v
目 錄
書頁名﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ ⅰ 中文摘要﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ ⅱ 英文摘要﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ ⅲ 誌謝﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ ⅳ 目錄﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ ⅴ 表目錄﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ ⅷ 圖目錄﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ ⅸ 第一章 緒論﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 1 1.1 研究動機與目的﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 1 1.2 壓電發電系統文獻回顧與整理﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 2 1.3 壓電發電儲能系統簡介﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 9 1.4 本文貢獻﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 11 1.5 本文架構﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 12 第二章 壓電原理與壓電等效模型﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 13 2.1 壓電材料﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 13 2.1.1 壓電陶瓷材料﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 14 2.1.2 壓電效應﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 16 2.2 壓電方程式﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 18 2.2.1 機電耦合因數﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 23 2.2.2 壓電材料常見的操作模式﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 23 2.3 壓電等效模型﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 25 第三章 非隔離式直流對直流轉換器的操作原理﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 29vi 3.1 降壓型轉換器(Buck Converter) ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 29 3.1.1 Buck Converter 連續導通模式﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 31 3.1.2 Buck Converter 不連續導通模式﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 32 3.1.3 Buck Converter CCM 與 DCM 邊界條件﹒﹒﹒﹒﹒﹒﹒ 33 3.2 升壓型轉換器(Boost Converter)﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 34 3.2.1 Boost Converter 連續導通模式﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 35 3.2.2 Boost Converter 不連續導通模式﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 36 3.2.3 Boost Converter CCM 與 DCM 邊界條件﹒﹒﹒﹒﹒﹒﹒ 37 3.3 升降壓型轉換器(Buck-Boost Converter) ﹒﹒﹒﹒﹒﹒﹒﹒﹒ 38 3.3.1 Buck-Boost Converter 連續導通模式﹒﹒﹒﹒﹒﹒﹒ 39 3.3.2 Buck-Boost Converter 不連續導通模式﹒﹒﹒﹒﹒﹒ 40 3.3.3 Buck-Boost Converter CCM 與 DCM 邊界條件﹒﹒ 41 第四章 實驗機構和阻抗匹配轉換器設計概念﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 42 4.1 實驗機構﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 42 4.1.1 固定座﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 43 4.1.2 滑軌﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 43 4.1.3 馬達﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 43 4.1.4 齒輪﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 44 4.1.5 雙層壓電片﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 45 4.2 旋轉敲擊模式﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 47 4.3 阻抗匹配與最大功率傳輸概念﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 51 4.4 壓電片的最大功率輸出測試﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 53 4.5 阻抗匹配轉換器的設計概念﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 57 4.5.1 阻抗匹配轉換器基本架構﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 59 第五章 硬體電路架構與實驗﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 61
vii 5.1 硬體電路架構與元件選擇原則﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 61 5.1.1 全橋整流電路﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 62 5.1.2 PWM 產生器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 63 5.1.3 阻抗匹配轉換器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 64 5.2 實驗目的與實驗範例規劃﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 66 5.2.1 實驗目的﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 67 5.2.2 實驗範例規劃﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 67 5.2.3 參數設定﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 69 5.3 實驗結果﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 70 5.4 實驗結果討論﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 72 5.5 LED 閃爍器應用電路﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 78 5.6 實驗電路板實現﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 80 第六章 結論與建議﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 82 6.1 結論﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 82 6.2 建議﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 83 參考文獻﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 84
viii
表 目 錄
1.1 各種環境中能量擷取大小比較表[1] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 2 1.2 壓電式、電磁式、靜電式,三種發電能量密度比較表[2] ﹒﹒﹒﹒ 3 2.1 壓電材料分類表﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 13 2.2 正逆壓電效應﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 16 2.3 壓電方程式四種型態﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 19 2.4 八個受到邊界條件限制的機械與介電參數﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 20 4.1 馬達單圈的步階數與步進角[21] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 44 4.2 雙層壓電片規格﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 45 4.3 各種 PZT 在 31-mode 下的機電偶合因數﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 46 4.4 PZT-5X 的材料參數[23] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 46 5.1 實驗範例一(600pps) ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 68 5.2 實驗範例二(400pps) ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 68 5.3 實驗範例一實驗結果﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 70 5.4 實驗範例二實驗結果﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 71ix
圖 目 錄
1.1 MIT Joe Paradiso 的研究團隊設計的壓電鞋[3] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 4 1.2 利用球來衝擊壓電片示意圖[4] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 4 1.3 圓筒型衝擊式壓電能源轉換機構圖[4] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 5 1.4 圓筒型衝擊式壓電能源轉換器電路圖[4] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 5 1.5 以 RFID 來實現網路伺服小孩上下學安全控管概念圖[4] ﹒﹒﹒﹒﹒﹒ 6 1.6 以 RFID 來實現網路伺服小孩上下學安全控管介面[4] ﹒﹒﹒﹒﹒﹒﹒﹒ 6 1.7 雙層懸臂樑壓電換能器[2] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 7 1.8 壓電換能器受力示意圖[2] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 7 1.9 以微機電技術製成的壓電懸臂樑換能器[8] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 7 1.10 利用微機電製程技術來改變質量塊的形狀[9] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 8 1.11 不同振動模式下的壓電共振頻率域圖[10] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 8 1.12 壓電發電儲能系統概念圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 9 1.13 利用微分器作為斜率感測的同步擷取電路系統[12] ﹒﹒﹒﹒﹒﹒﹒﹒﹒ 10 1.14 結合隔離式 flyback 轉換器的壓電換能器[12] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 10 1.15 Buck-Boost Converter[13] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 10 2.1 高於居禮溫度 PZT 晶體[15] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 14 2.2 低於居禮溫度 PZT 晶體[15] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 14 2.3 壓電陶瓷透過高壓電場(1)極化前 (2)極化中 (3)極化後[15] ﹒﹒﹒﹒ 15 2.4 壓電效應[11] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 17 2.5 壓電關係六個方向表示法﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 21 2.6 壓電材料的三種操作模式﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 24 2.7 壓電等效機電模型[17] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 25 2.8 壓電等效電路模型 [18] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 27
x 3.1 降壓型轉換器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 29 3.2 (1) : on , : off ,電感電流上升 ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 30 3.2 (2) : off , : on ,電感電流下降﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 30 3.2 (3) : off , : off,電感電流下降到零開關尚未導通﹒﹒﹒﹒﹒﹒ 30 3.4 降壓型轉換器在 CCM 的電感電壓與電流﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 31 3.5 降壓型轉換器在 CCM 的伏秒平衡法則﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 31 3.6 降壓型轉換器在 DCM 的電感電壓與電流﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 32 3.7 降壓型轉換器在 DCM 的伏秒平衡法則﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 32 3.8 降壓型轉換器在 CCM 與 DCM 邊界的電感電壓與電流﹒﹒﹒﹒﹒﹒ 33 3.9 升壓型轉換器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 34 3.10 (1) : on , : off ,電感電流上升﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 34 3.10 (2) : off , : on ,電感電流下降﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 35 3.10 (3) : on , : off ,電感電流下降到零開關尚未導通﹒﹒﹒﹒﹒ 35 3.11 升壓型轉換器在 CCM 的電感電壓與電流﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 35 3.12 升壓型轉換器在 CCM 的伏秒平衡法則﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 35 3.13 升壓型轉換器操作於 DCM 的電感電壓和電流﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 36 3.14 升壓型轉換器在 CCM 與 DCM 邊界的電感電壓與電流﹒﹒﹒﹒﹒﹒ 37 3.15 升降壓型轉換器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 38 3.16 (1) : on , : off ,電感電流上升﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 38 3.16 (2) : off , : on ,電感電流下降﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 39 3.16 (3) : on , : off ,電感電流下降到零開關尚未導通﹒﹒﹒﹒﹒﹒ 39 3.17 升降壓型轉換器在 CCM 的電感電壓與電流﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 39 3.18 升降壓型轉換器在 CCM 的伏秒平衡法則﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 39 3.19 升降壓型轉換器在 DCM 的電感電壓和電流﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 40 3.20 升降壓型轉換器在 CCM 與 DCM 邊界的電感電壓與電流﹒﹒﹒﹒﹒ 41
xi 4.1 壓電發電機實驗機構﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 42 4.2 壓電發電機實驗機構簡略尺寸圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 43 4.3 NPM 步進馬達[21] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 44 4.4 馬達控制器[20] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 44 4.5 齒輪﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 44 4.6 齒輪規格圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 44 4.7 雙層壓電片﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 45 4.8 F 施力於壓電片的最末端﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 47 4.9 齒輪﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 47 4.10 旋轉敲擊模式簡化示意圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 48 4.11 單齒可敲擊壓電片的最大角度示意圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 48 4.12 200pps 操作模式下的壓電電壓訊號上升時間﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 51 4.13 400pps 操作模式下的壓電電壓訊號上升時間﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 51 4.14 600pps 操作模式下的壓電電壓訊號上升時間﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 51 4.15 壓電等效電流源加上負載電路圖[13] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 52 4.16 壓電發電功率相對於負載和在共振頻率上的機電參數關係圖[13] ﹒﹒ 53 4.17 (a)在模式 600pps 不同負載下的輸出功率﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 54 4.17 (b)在模式 600pps 不同負載的負載電壓﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 54 4.18 (a)在模式 400pps 不同負載下的輸出功率﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 55 4.18 (b)在模式 400pps 不同負載的負載電壓﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 55 4.19 (a) 在模式 200pps 不同負載下的輸出功率﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 56 4.19 (b)在模式 200pps 不同負載的負載電壓﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 56 4.20 利用 Buck-Boost Bonverter 作為阻抗匹配轉換器[13] ﹒﹒﹒﹒﹒﹒﹒ 57 4.21 DCM 模式下電感的電壓和電流特性圖[13] ﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 58 4.22 開關驅動電路示意圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 60
xii 4.23 PWM 產生電路示意圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 60 5.1 本研究硬體電路圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 61 5.2 全橋整流電路圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 62 5.3 PWM 產生器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 63 5.4 石英晶體震盪器輸出波形圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 64 5.5 升降壓型轉換器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 65 5.6 (a)負載R﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 66 5.6 (b)等效負載Req﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 66 5.7 等效輸入阻抗量測值與理論值比較圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 73 5.8 理想負載的輸出功率與等效負載的輸出功率比較圖﹒﹒﹒﹒﹒﹒﹒﹒ 74 5.9 阻抗匹配轉換器輸出功率與輸入功率比較圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 75 5.10 轉換器功率轉換效率比較圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 76 5.11 理想負載的輸出功率與等效負載的輸出功率效率圖﹒﹒﹒﹒﹒﹒﹒﹒ 77 5.12 LED 閃爍器應用電路﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 78 5.13 400pps duty=0.3 電容電壓VC2波形圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 79 5.14 600pps duty=0.4 電容電壓VC2波形圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 79 5.15 實驗電路板 PCB 電路圖﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 80 5.16 硬體電路板實現﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 80 5.17 本研究實驗設備﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 81
1
第一章 緒論
1.1 研究動機與目的
對於現今的人類來說,能源已經與生活有著密不可分的關係,目前全世界的 能源供應,來自於煤、石油、天然氣、…等石化燃料根據專家估測,石化原料在 四十年之內將面臨枯竭,能源危機正步步逼近,而且也因為人類對石化能源的依 賴,造成地球暖化程度逐年加劇,人類將面臨生存的危機。 因此為了減少地球上能源的消耗及所帶來的汙染,再生能源的概念在世界各 國正極力的推廣,日本目前宣布投入75 兆日圓加速實現低碳社會與開發,美國 投入了320 億美元於全球最大的能源發展規劃,台灣更是在政策上例如節能減 碳的相關獎勵及輔導措施,獎勵購置節能產品及提高再生能源設置補助,由此可 知,再生能源的開發是現今很重要的議題。 再生能源有別於傳統的發電機產能方式,其目的在於收集環境中未利用到的 能源,再藉由各種設備轉換成電能加以利用,例如水力發電是藉由水力的衝擊發 電機發電,風力發電是利用風力帶動發電機轉換成電力,太陽能發電則是利用太 陽能板將光能轉換成電能,壓電發電為運用一種特殊的介電材料來發電,當壓電 材料產生變形時就會有電能的產生,此種現象也被應用於生活中振動的發電,例 如人們走路的晃動及踩踏、手臂的揮動及搖擺、車行走因為路不平的振動等,生 活中的振動其實隨處可見,壓電發電的研究近年來有相當多的篇幅,然而在前端 壓電發電的機構設計上和後端儲能電路的轉換效率探討上,仍有許多值得研究的 空間。2 一般壓電發電機是用懸臂樑結構,在懸臂樑的前端結合一質量塊,利用生活 中垂直的振動,此時質量塊的慣性力會帶動壓電結構達到發電的效果,如果要達 到較佳的發電量,必需要使壓電材料操作在共振頻率上,或是要有一定程度的加 速度且穩定的振動,要在生活中要找到高頻或是穩定大加速度的振動源並不容易, 然而除了垂直的振動外,生活中的轉動也處處可見,家裡的電風扇、腳踏車、摩 托車的輪子,這些轉動較為穩定且有較大的加速度,本文目的是利用旋轉敲擊模 式來發電,此種方式運用轉動來帶動齒形機構敲擊壓電片來達到發電的目的,並 且結合阻抗匹配轉換器來達到發電量的最佳化,最後可對電池做儲能的應用,或 是與LED 燈閃爍器結合應用。
1.2 壓電發電系統文獻回顧與整理
由於能源議題越來越受到重視,加上無線網路通訊設備在日常生活中的使用 更加廣泛,無線射頻識別系統(radio frequency identification,RFID),從圖書館 借書、搭乘捷運、繳停車費、識別證…等等更是無所不在,如何供給能源給這些 龐大的電子設備,同時又要降低對地球造成的汙染,如何收集環境中的能量並且 有效率的轉換成電能便是一個很重要的議題,近來年半導體製程技術和類比 IC 設計技術日益精進,低功率的類比電路技術日漸成熟,因此利用智慧型材料來擷 取環境中的能源,並且提供足夠的供電給這些微電子設備的概念不再遙不可及。 表1.1 各種環境中能量擷取大小比較表[1]3 在地球上的每一個地方都存在著各種形式的能量,例如:太陽能、風力能、 水力能、熱能、動能等。表1.1[1]為各種環境中能量的比較。 其中,振動能量的來源對於外在環境因素的影響較小,因此吸收外部振動能 量並轉化為電能等相關議題,最近受到廣泛地重視,並被諸多國際實驗室設定為 重點研究領域。目前有幾種機制可以將動能轉換成電能,例如:壓電式發電、電 磁式發電、靜電式發電,如表1.2[2],壓電式發電有最佳的能量密度,因此以壓 電材料為轉換媒介之壓電式發電機,已經得到不少國際團隊的重視,對於壓電發 電系統,以下將為大家做個簡單的介紹。 表1.2 壓電式、電磁式、靜電式,三種發電能量密度比較表[2]
1998 年 MIT Joe Paradiso 的研究團隊,設計出一款鞋子可以透過走路來發
電,把壓電材料結合在運動鞋的可拆卸鞋墊裡面,如圖1.1[3],可見在腳跟的地 方,有一背對背的雙層壓電晶片所組成的結構,在腳趾的地方有一彎曲的木板, 兩邊各由八層polyvinylidine fluoride(PVDF) 的壓電薄膜所組成,走路時,由於 有腳跟往下踩與腳趾往前踏的兩種力量,透過這兩種力量使得壓電材料產生形變 藉而達到發電的目的,在一般人走路的步伐情形下,腳跟可以收集到8.3 mW 功 率,腳趾可以收集到1.3mW 功率,每隻鞋子都有足夠的發電量供給傳輸 12 – bit ID code 的無線通訊板。
4
圖1.1MIT Joe Paradiso 的研究團隊設計的壓電鞋[3]
2007 年東京玉川大學工程學院的 M.Takeuchi, S.Matsuzawa, K. Tairaku and C. Takatsu 在(IEEE International Ultrasonics Symposium) 超音波研討討會上發表 了一篇論文,文中提到的概念是把衝擊或撞擊的能量轉換成電能,最後再把電能 提供給RFID tag 做其他的應用。 如圖1.2[4],一顆球由於受到重力的吸引而產生往下的衝擊力,當此顆球撞 擊底部的壓電盤,壓電盤因為受力而變形產生電能。 圖1.2 利用球來衝擊壓電片示意圖[4] 如圖 1.3[4],圖片右側為一透明圓筒,裡頭放入一顆玻璃珠,在透明圓筒的 上下兩端各放入兩片壓電盤,左側PCB 板為整流電路,如圖 1.4[4],由於有四個 壓電盤所以需要透過四組橋式整流,整流後儲存進電容裡再供電給RFID tag。
5 圖1.3 圓筒型衝擊式壓電能源轉換機構圖[4] 圖 1.4 圓筒型衝擊式壓電能源轉換器電路圖[4] 文中同時提出一個非常有趣的想法,如果把圖1.3[4]的裝置裝進小學生的書 包裡頭,當小學生走路上學時,透過走路時所產生的振動發電,再結合 RFID reader 與 PC 設備即可隨時監控小孩的上下學情形,概念如圖 1.5,如此一來, 家長與學校兩方面都可以透過此系統,了解到小孩是否有去上學,並且確實的掌 握小孩的上下學時間,如圖1.6[4]。
6
圖1.5 以 RFID 來實現網路伺服小孩上下學安全控管概念圖[4]
圖1.6 以 RFID 來實現網路伺服小孩上下學安全控管介面[4]
現今藉由壓電材料收集振動能的文章,在前端的結構設計大多採用懸臂樑 加一質量塊的結構,圖1.7[2]為 S. Roundy and P. K .Wright 的實驗機構,此結構 採用雙層(bimorph)壓電片,圖如 1.8[2 ],當質量塊受重力向下施力,上層受到 拉伸的應變,下層受到壓縮的應變,V 為壓電片應變產生的電壓,此篇的應用為 無線的電子產品。
7 圖1.7 雙層懸臂樑壓電換能器[2] 圖1.8 壓電換能器受力示意圖[2] [5]是對雙層懸臂樑結構做模組化的分析,推導出機械能轉成電能的關係式, [6]是分析並設計操作在較低頻率(4Hz)壓電發電機,利用手搖來發電,並且應用 於無線訊號傳輸設備,[7]是以放射性同位素為動力的壓電發電機,利用異性電 荷相吸,異性電荷相斥來使壓電片產生震動。 隨著半導體製程技術的成熟,微機電(MEMS)的概念越來越受到重視,[8] 是利用半導體製程技術設計的微型懸臂樑壓電發電機,如圖1.9[8],操作頻率介 於20Hz 到 40Hz 之間,發電量約為 1 uW,[9]也是利用半導體製程技術設計的 微發電機,並且使用不同的蝕刻技巧來最佳化質量塊的結構,使得懸臂樑在最小 的力量下有最大的形變量,此結構的共振頻率操作在300Hz 到 800Hz 之間,最 大發電量可到達約1mW,如圖 1.10[9]。 圖1.9 以微機電技術製成的壓電懸臂樑換能器[8]
8 圖1.10 利用微機電製程技術來改變質量塊的形狀[9] 圖1.11[10]為壓電材料在不同振動模式下的共振頻率域圖,由於旋臂量結構 振動的方式屬於(Flexure Vibration),相較其他振動模式是屬於低頻的應用,由 於日常生活中的振動大部分為低頻,因此懸臂樑結構的確是首選,本論文也採用 懸臂樑結構為設計首要。 圖1.11 不同振動模式下的壓電共振頻率域圖[10]
9
1.3 壓電發電儲能系統簡介
一般而言,壓電材料的發電電壓是與單位時間的形變量成正比,如果只是 單純壓著發電材料並不會有任何電壓產生,壓電發電機的輸出電壓波形為交流弦 波,所以必須經過AC to DC 的處理,如圖 1.12 圖中前端部分為壓電片的等效 電流源模式,電容為壓電片的等效內部電容,利用橋式整流器整流,後端可利用 DC to DC converter 做升壓降壓的功用,最後再把轉換之後的電能儲存到儲能元 件中,DC to DC converter 分成非隔離式與隔離式兩大類,其中這兩大類都有三 種類型,降壓型、升壓型、升降壓型,儲能元件的選擇,一般而言使用電容或是 充電電池。 DC to DC
converter StorageEnergy component ip cp Piezoelectric element Vrect Vout 圖1.12 壓電發電儲能系統概念圖 除了操作在共振頻率上有最大發電量,在電路的設計更是有許多種方法來達 成,[12]設計了一同步擷取電路圖 1.13[12],此電路的巧思為當壓電片達到最大 的變形量的同時,剛好是交流電弦波的頂點,利用一微分器來感測斜率由正轉負 的瞬間,把壓電內部電容的電量放掉,下一周期即可充到兩倍的電壓,達到發電 量大大的提升,由於此電路使用了flyback 轉換器圖 1.14[12],為隔離式的 DC to DC converter ,可以不受負載效應的影響,但耦合電感需自行製作較為複雜,而 且如果壓電發電機的交流波形不是很完美的弦波,在斜率的感測上會有難度。
10 圖1.13 利用微分器作為斜率感測的同步擷取電路系統[12] 圖1.14 結合隔離式 flyback 轉換器的壓電換能器[12] [13]利用 Buck-Boost Converter 如圖 1.15 來達到所謂的阻抗匹配的功用,由 於壓電發電機的最大發電量受後端負載所影響,為了求得最大的發電量,此論文 利用操作在不連續導通模式中的升降壓型轉換器,透過責任周期與電感值的設計, 可得到一等效輸入阻抗,再透過轉換器輸出儲存在充電電池中。 圖 1.15 Buck-Boost Converter[13]
11 近年的研究中不乏是針對如何達成最佳發電量的電路設計,壓電發電機的發 電量是屬於微功率型發電機,發電量在低頻操作下一般不超過1mW,因此在控 制電路中使用的感測元件,例如:比較器、運算放大器、PWM generator 等,如 果感測元件的消耗功率太大或是設計不良,很容易造成電路的功率消耗大於壓電 發電機本身的發電量,如果使用外部電源來提供電路所需的功率消耗便失去了設 計壓電發電機的意義,因此本論文除了在前端利用旋轉敲擊模式來發電外,後端 著重在使用阻抗匹配轉換器來提升發電量,轉換器的功率消耗極低,對發電量的 影響甚小,本論文在後端的設計上除了使用充電電池作為儲能元件外,也設計了 一個低功率的LED 閃爍器作為後端的應用。
1.4 本文貢獻
在阻抗匹配轉換器的開關驅動電路上,本研究設計了一個低功率的脈波寬度 調變(pulse width modulation,PWM)產生器,包含了鋸齒波產生電路與比較電 路兩部分,鋸齒波產生電路利用一個石英晶體震盪器串連一個電阻組成,PWM 產生器消耗功率極低,所以在控制電路的電源供應部分,不用外接電源,由壓電 發電機直接供電,PWM 產生器可以透過改變分壓電阻值的不同,來改變脈波的 責任周期,所以可以調整脈波的責任周期來配合所需的阻抗匹配值,所以改善了 過去的開關責任周期只能為定值,所以當需要較大的阻抗匹配值時,需要用到很 大的電感值。12
1.5 本文架構
第一章:緒論 敘述研究動機與目的, 對於壓電發電的特色及現今研究概況簡介,其中對於壓 電發電系統和壓電儲能系統做個簡單的介紹與整理。 第二章:壓電原理及壓電等效模型 介紹壓電材料的壓電效應及壓電方程式,利用壓電等效模型來說明壓電發電機的 基本原理。 第三章:非隔離式直流對直流轉換器操作原理 介紹非隔離式DC to DC 轉換器,降壓型、升壓型、升降壓型,探討如何操作在 連續導通模式及不連續導通模式的條件。 第四章 : 實驗機構和阻抗匹配轉換器設計概念 介紹本研究的實驗機構,壓電材料的規格,旋轉敲擊模式的設計概念,阻抗匹配 與最大功率輸出的概念和阻抗匹配轉換器的設計概念。 第五章:硬體電路架構與實驗 介紹本研究硬體電路架構,電路中各元件的選擇原則,並且根據實驗的目的規劃 實驗範例,量測各種電性,利用圖片和表格整理出實驗結果並討論實驗結果。 第六章:結論與建議 對本論文做個總結,提出未來可以改進的方向與建議。13
第二章 壓電原理與壓電等效模型
壓電材料為一智慧型材料,可有多種大小與形狀的變化,壓電材料有許多種 類,而現今最廣泛應用的是壓電陶瓷材料,本章將簡介壓電材料的種類以及壓電 陶瓷(PZT),何謂正逆壓電效應,並且為了解釋壓電材料的機電耦合效應,利用 壓電方程式及壓電等效電路模型來加以說明。2.1 壓電材料
壓電材料對於環境敏感度較低,製造容易可製成多樣形狀,例如:單層、多 層、管狀、環狀、圓柱形等各種壓電晶片,壓電材料反應時間快速,因此很適合 用於機械能轉換成動能的應用,壓電材料一開始並不是人工製造出來的,原本在 地球上就有壓電礦石的存在,隨著材料科學的發展,至今已經可以藉由人工製造, 一般壓電發電材料可分成四種種類,如表2.1,單晶類(Single Crystal),薄膜類 (Thin Film),聚合物(Polymer),陶瓷(Ceramic),複合材料(Composite Materials)。 表2.1 壓電材料分類表[17] 種類 材料 單晶 石英(水晶)、電氣石、羅德鹽、鉭酸鹽、鈮酸鹽等 薄膜 氧化鋅(ZnO)、氮化鋁(AlN)等 聚合物 聚偏二氟乙烯(PVDF)等 陶瓷 鈦酸鋇、鋯鈦酸鉛(PZT)等 複合材料 PVDF-PZT 等14
2.1.1 壓電陶瓷材料
壓電陶瓷是一種可以使電能和機械能相互轉換的特殊陶瓷材料。它主要是 藉由燒結而形成的一種多晶材料,與普通的單晶壓電材料相比,有相當多的優點, 例如價格較低廉、容易加工成各種不同形狀的元件、能大量生產等,因此可以針 對各種不同的應用做客製化的製作。 壓電陶瓷是由許多粒徑在幾個微米左右的小晶粒所組成,主要成分是鉛、鈦 和鋯的氧化物,其優點為可使用不同比例的搭配來改變其壓電特性,雖然壓電陶 瓷的種類很多,但其中以鋯鈦酸鉛 (PZT) 因為具有良好的壓的活性,耐酸鹼, 可製成任何形狀,本論文也採用PZT 作為實驗的材料,通常在壓電陶瓷的實際 使用上,會搭配軟性金屬材料作為基板,或是使用於雙層壓電晶片中間的夾層, 軟性金屬可緩衝陶瓷材料容易在使用中因為勁度過大產生碎裂。 下圖為PZT 的晶體結構,其晶格為四方結構,分子式 r Ti ,四邊頂 點為各八分之一的氧(負二價)離子,在各面的面心處共有六顆二分之一的鉛(正 二價)離子,而中心點為一顆鈦離子或鋯離子。 圖 2.1 高於居禮溫度 PZT 晶體[15] 圖2.2 低於居禮溫度 PZT 晶體[15]
15 正式的分子式應該包含壓電材料鈦離子跟鋯離子兩者之間的比例,例如 Pb[Zr xTi 1-x]O3 0<x<1,表示,x 為鋯離子占的百分比,1-x 為鈦離子占的百 分比,圖2.1[15]為在高於居禮溫度的 PZT 晶格,此時的離子晶格是對稱的,圖 2.2[15]為在低於居禮溫度的 PZT 晶格,此時離子晶格呈現不對稱結構,使得正 電荷中心與負電荷中心位於不同位置上,而產生電性偶極矩。 圖2.3 壓電陶瓷透過高壓電場(1)極化前 (2)極化中 (3)極化後[15] 壓電材料燒結出來後,如圖2.3[15]各 PZT 晶格都具有電偶極矩,但是方向 呈現不規則排列,此時並沒有壓電特形的存在,需再經過高壓電場的處理,即所 謂的極化處理(poling),經過極化處理的壓電材料,其晶格都具有相同方向的電 偶極矩,才有所謂的壓電特性。
16
2.1.2 壓電效應
壓電效應(Piezoelectricity) ,此現象最早是 1880 年由皮埃爾。居禮(Pierre Curie)和雅客。居禮(Jacques Curie)兩兄弟發現,居禮兄弟發現對與某些晶體施 加壓力時,它們會在材料表面產生電壓訊號,又若將這些晶體置於電場當中,它 們會壓縮而變形,而壓電材料會有壓電效應,壓電材料會有壓電效應是因晶格內 原子間特殊排列方式,使得材料有應力場與電場耦合的效應。
如上一小節所示,具有壓電性的材料其首要條件是晶體結構中存在非對稱中 心(non-centrosymmetry),也就是說,其正電荷中心和負電荷中心並非位於同一 個位置上,使得正負電荷無法表現出中和的特性,就會有電偶極矩的存在。電荷 及應變間相互的因果關係,使得晶體在結構上存在一個可受外力作用而產生電荷 移動的帶電體,此帶電體稱為電偶極矩(electric dipole moment)。只要物體之結 晶構造存在可受外力而移動之電偶極矩,就會產生機電能量彼此轉換的現象,此 即壓電現象的根源,壓電效應分成正逆兩種,以下表格說明。 表2.2 正逆壓電效應正壓電效應 (機械能轉電能)
當對壓電材料施以物理壓力時,材料體內之電偶極矩會因壓縮而變短,此時壓電 材料為抵抗這變化會在材料表面產生正負電荷,以保持原狀。逆壓電效應 (電能轉機械能)
當在壓電材料表面施加電場(電壓),因電場作用時電偶極矩會被拉長,壓電材 料為抵抗變化,會沿電場方向伸長。17 壓電效應可由圖2.4 來解釋: (a)為材料的電偶極矩方向,由負電荷中心到正電荷中心。 (b)(c)為正壓電效應。 (d)(e)為逆壓電效應。 (f)壓電片上下周期性的變形就會產生交流弦波電壓訊號。 圖2.4 壓電效應[11]
18
2.2 壓電方程式
壓電現象為機械能與電能之間的轉換,對於一般的沒有壓電特性的材料而言, 施加多少機械應力T 會產生多少機械應變 S,存在著相對應的比例關係[17]:(2-1) 或
(2-2) 其中 T :應力(stress) S :應變(strain) s : 彈性韌性(elastic compliance) c : 彈性剛性(elastic stiffeness) 若在非壓電性材料的兩端加入一電場E,即材料內部會產生電位移 D,兩者 間的關係為[17] :
(2-3) 或
(2-4) 其中 E :電場(electric field) D :電位移(electric displacement) ε :介電常數(permeability) β :反介電常數(impermeability)
19 對壓電材料而言,機械特性與電性之間彼此會互相影響,而使其關係並不如 上述 (2-1) 至 (2-4) 式那麼簡單,同常會包含機械項及介電項兩部分,對一壓 電效應而言,所涉及的變數有四種,兩個為機械彈性量,即應力T 及應變 S,而 另兩個為介電量,及電場E 及電位移或電位移 D,因此所選擇的自變數及應變數 之不同,壓電方程式有d,g,e,h 四種不同的形態[17],如表 2.3 所示。 表2.3 : 壓電方程式四種型態
d
形態
g
形態
e
形態
h
形態
其中d , g , e , h 稱為壓電參數(piezoelectric parameters),其他參數定義如表 2.4[17] 所示。20 表2.4 :八個受到邊界條件限制的機械與介電參數[17] 表示當電場為定值時所量測到的韌性常數 表示當電位為定值時所量測到的韌性常數 表示當電場為定值時所量測到的剛性常數 表示當電位為定值時所量測到的剛性常數 表示當應力為定值時所量測到的介電常數 表示當應變為定值時所量測到的介電常數 表示當應力為定值時所量測到的反介電常數 表示當應變為定值時所量測到的反介電常數 上述各參數並非獨立,通常可由其中兩個值來求得另外一個值,關係為[17]: (2-5) (2-6) (2-7) (2-8)
21 壓電材料並分等向性材料,所以壓電方程式的各參數關係間並非單純之純數 學關係,而為一個有方向性的向量(vector)或張量(tensor)關係,因此在考慮壓電 關係時必需了解其方向性,一般來說,機械量(應力)擁有六個方向,三個縱向及 三個剪向,而介電量只有三個縱向關係 ,由圖 2.5 可知 1,2,3 表示直角坐標的 x,y,z 的方向而 4,5,6 表示xz,zx,yz 的剪力方向。
1(x)
2(y)
3(z)
4(xz)
5(zx)
6(yz)
(0,0)
圖2.5 壓電關係六個方向表示法 所以完整的壓電方程式必須有方向的表示,以d 型態的壓電方程式為例,必 需改寫成[17]。 (2-9) (2-10) m , n =1~6 i , j =1~322 若寫成矩陣型態則 (2-11) 其參數矩陣可分為四個小矩陣,其中左上角為一(6× 6)對角對稱的彈性係數 矩陣,有21 個獨立的參數,即 (2-12) 右下角為一(3× 3)對角對稱的介電參數矩陣,有 6 個獨立的參數,即 (2-13) 下方與右方的壓電參數矩陣為非對稱,有18 個獨立的參數,即 (2-14) 由此可知,要熟悉壓電材料的特性,所要知道的參數共有45 個之多,21 個彈性 參數,6 個介電參數和 18 個壓電參數,但實際上,隨著應用種類及操作模式的 不同和晶體對稱關係使多數參數不存在,所以會簡化很多,在2.2.2 會有更詳細 的說明。
23
2.2.1 機電耦合因數
在研究材料的壓電特性時,除了上述的各種參數之外,還有一相當重要的特 性參數,此一參數代表機械能(彈性能)與介電能之間的互換能力,它稱為機電偶 合因數(electromechanical coupling factor),以k 來表示。此一偶合因數的定 義為機電偶合能量密度與機械能及介電能密度幾何平均之比,存儲的機械能(電 能)與外加電能(機械能)比值之平方根,亦即 k = 儲存機械能 外加電能 1 = 儲存電能 外加機械能 1 = 機電偶合能量密度 機械能密度 電能密度 1
2.2.2 壓電材料常見的操作模式
在壓電材料的操作模式上,依動作原理的不同可分成三種模式,33 模式,31 模式,15 模式,以壓電發電機的應用而言,如圖 2.5 所提到的六個方向,這兩 個數字的第一個字, 其代表的意思是電場產生的方向,而第二個數字代表的是 壓電材料的機械結構變形方向,因此33 模式代表的是,如果一壓電材料的結構24 變形方向為3(Z)方向,則電場也會在 3(z)方向產生,亦即電場與應變方向相同, 31 模式代表的是,如果依壓電材料的結構變形方向為 1(x)方向,則電場會在 3(z) 方向產生,是電場與應變方向互相垂直,而15 模式代表壓電材料的結構變形方 向為5(zx),通常是受到剪應力才會有剪方向的應變,而電場產生方向為 1(x), 本文採用的懸臂樑發電模式即是31 模式,圖 2.6 說明此三種操作模式。 圖2.6 壓電材料的三種操作模式
25
2.3 壓電等效模型
由於壓電材料是利用機械能轉換成電能,所以牽涉到機械能方程式與電性方 程式兩種理論的結合,其動態特性非常複雜,因此有多篇研究建立了簡單的壓電 等效模型以方便分析壓電換能器的特性,本節對壓電等效模型做個簡介。 圖2.7 壓電等效機電模型[17] 圖 2.7 為壓電等效機電模型,其中各項參數定義如下: : 施加於壓電材料上的力 (N) : 壓電材料本身的機械剛性 (N/m) : 壓電發電系統的等效阻尼 (N/v) : 壓電發電系統的等效電流源 (A) : 壓電材料的等效電容 (C/V)
26 圖 2.7 的等效電路模型可由以下三式來解釋,由於壓電材料有機電兩特性的 耦合效應,式子(2-18)代表正向力不只是與位移量有( 楊氏系數)比例關係, 與電壓 也存在著 的比例關係, 為壓電材料的機電耦合係數。壓電等效電流 源的電流大小與位移量的微分呈 倍的關係,亦即與位移量的速度有關係,如式 子(2-19),系統的力量平衡方程式,F = Ma + Cv + Kx 如式子(2-20)所示。 1 19 其中式(2-20)中可分成三種力 慣性力 (F=Ma) 1 阻尼力 (F=Bv) 彈簧力 (F=Kx) 3 把這三種利用速度的拉式轉換來表示分別為 慣性力F=sMv 阻尼力F=Bv 彈簧力F=(Kv) /s 因此式子(2-20)可以改寫成力量與速度的關係式
27 此式子可以對應到一般的 RLC 電路電壓與電流的關係 1 因此圖 2.7 的壓電等效模型可用圖 2.8 來表示,即為壓電等效電路模型 圖2.8 壓電等效電路模型 [18] 其中電阻就等於系統中的阻尼,電感就等於系統中的質量,電容就等於系統剛性 的倒數,力、速度與電壓、電流的關係式可用一個2× 2的矩陣來表示,如下: 9 此為最常見的壓電等效電路模型。
28 如果在i=0(開路)的情況下,其開路電壓可以表示成式(2.30),其中 為開路下之機械剛性。 . . . . . . 3 如果考慮壓電元件受週期性外力作用下,儲存於壓電元件中的內部電容所得 到的開路電能大小為 1 . 31 為結構中的自然共振頻率,其中 根據式子(2.31)若 = 則會有最大的開路電能。 由於壓電材料操作在共振頻率上會有最大的電能輸出,所以現今大多研究都 著重於探討在共振頻下的發電量,共振頻帶為一個很窄的頻域,而且共振頻率大 多在數百到數K之間,要在日常生活中找到如此高頻的震動並不容易,本論文討 論的頻率屬於低頻,因此將不對壓電材料在共振頻率上的特性多做分析。
29
第三章
非隔離式直流對直流轉換器操作原理
直流對直流轉換器(DC to DC converter)是用得最多也最廣,也是結構變化最 豐富與最多樣的一類轉換器,各式電子產品、電源供應器、充電器等,都需要直 流對直流轉換器,直流對直流轉換器的特點在於輸入與輸出必需是直流形式,其 電流都是從輸入端流向輸出負載端,因此所用之開關元件均屬於單方向性。從輸 入端與輸出端是否共地的方式可分為兩種類型,隔離型與非隔離型,本章將介紹 非隔離型三種常見的轉換器,降壓型、升壓型、升降壓型[19]。3.1 降壓型轉換器( Buck Converter )
Buck 轉換器是屬於降壓型轉換器,如圖 3.1 所示,發源於二十世紀初,目 前文獻上不可考,也是直流對直流轉換器中最早發展出來的,它的轉換原理最直 接也最容易理解,當主動開關Mp 導通(on)時,能量就由輸入端直接傳輸至輸出 端,當開關截止(off)時,只依靠電感和電容所儲存的能量繼續供給負載所需。若 發覺輸出電壓下降太多,可以調整開關的導通時間,輸出功率的調整機制很直接 也很容易了解。 Vin Mp L1 D1 C1 Ro Vout 圖3.1 降壓型轉換器30 其操作原理可分成三個部分 當開關 導通時,二極體 為截止 , 此時 電感電流 上升,如圖3.2(1)。 Vin Mp L1 D1 C1 Ro Vin-Vout iL1 Vout 圖3.2(1) : on , : off ,電感電流上升 當開關 截止持,二極體 因為電感電流需有流通路徑而導通,此時 電感電流下降,如圖3 。 Vin Mp L1 D1 C1 Ro iL2 -Vout 圖3.2(2) : off , : on ,電感電流下降 當電感電流放電到零,開關尚未導通,如圖3.2(3)。 Vin Mp L1 D1 C1 Ro Vout 圖3.2(3) : off , : off,電感電流下降到零開關尚未導通
31
3.1.1 Buck Converter 連續導通模式
由圖 3.4 所示,當開關 on 時電感電流上升,開關 off 時電感電流下降,電 感電流下降到零之前又繼續充電,此種導通模式稱為連續導通模式 (Continuous Conduction Mode,CCM)I
L1V
L1t
t
ont
offT
Vin-Vout -Vout 圖3.4 降壓型轉換器在 CCM 的電感電 壓與電流 VL1A
B
Vin-Vout -Vout ton toff T IL1 t 圖 3.5 降壓型轉換器在 CCM 的伏 秒平衡法則 電感電流以CCM 方式導通,當達到穩態的時候,電感電流在一個周期T 中 電感電流充電與放電達到一個平衡的狀態,因此電感上升的電流值會相等於下降 的電流值,如式(3-1) 3 1 定義責任周期(duty ratio) 1 3 化簡(3-1) 1 3 332
式子(3-3)可看成是 波形對時間的積分總和為零,如圖3.5 也就是說 A 的
面積等於B 的面積,亦即伏秒平衡法則(Volt-Second Balance Principle)。 最後由(3-3)得到Vin 與 Vout 之間的關係。 3 此關係式的前提是所有電路特性都在理想的情況下,且假設輸出電壓Vout 的漣波遠小於Vout 的平均值,大約在 5%以內才成立。
3.1.2 Buck Converter 不連續導通模式
由圖 3.6 所示,當開關 on 時電感電流上升,開關 off 時電感電流下降,在 下次開關on 之前,電感電流已經放到零,此種導通模式稱為不連續導通模式(Discontinuous Conduction Mode,DCM)。
IL1 VL1 t D1Ts D2Ts T Vin-Vout -Vout D3Ts 0 圖3.6 降壓型轉換器在 DCM 的電感電 壓與電流 IL1 VL1 t D1Ts T Vin-Vout -Vout D3Ts 0
A
B
D2Ts 圖 3.7 降壓型轉換器在 DCM 的伏 秒平衡法則 如圖3.7 在不連續導通模式操作且在穩態時,利用伏秒平衡法則,可得下式 . 3 經整理後可得到輸入對輸出的電壓轉換比 333
3.1.3 Buck Converter CCM 與 DCM 的邊界條件
Buck Converter 究竟在什麼條件下會維持在 CCM,亦或是什麼條件下會轉到 DCM 我們可以藉由 CCM 與 DCM 的邊界條件來了解,圖 3.8 所示,當在邊界情 況下,可得電流最大值 : . 3 且此時的電感平均輸出電流: I 3 3 9 如果電感電流大於此邊界條件則Buck Converter 操作在連續導通模式(CCM), 反之Buck Converter 操作在不連續導通模式(DCM)。
I
L1V
L1t
D
1T
s(1-D
1)T
sT
Vin-Vout -Vout 0 圖3.8 降壓型轉換器在 CCM 與 DCM 邊界的電感電壓與電流 從輸入電壓與輸出電壓的角度來看可得 如果在CCM 中 則 1 3 1 如果在DCM 中 則 1 3 1134
3.2 升壓型轉換器(Boost Converter )
Boost 轉換器是屬於升壓型轉換器,它是 Buck 轉換器的對偶型,最早在文 獻上所能找到的,是在二次世界大戰時期(1939~1945)。Boost 轉換器是用來提 升輸入電壓,以便無線電訊號之發射,當然那時候還是用真空管而在非電晶體。, Boost 的操作模式與 Buck 相同,也可以分為連續導通模式和不連續導通模式, 事實上這也是所有非隔離式轉換器(Dc to Dc Converter)所共通的特性之一,如圖 3.9 為升壓型轉換器(Boost Converter)。 Vin Mp L2 D2 C2 Ro Vout 圖3.9 升壓型轉換器 其中操作原理可分為三個部分,第一個部分,如圖3.10(1),當開關 導通 時,二極體 會截止,輸入電壓會直接跨於電感 上, ,電 感電流會直線上升。 Vin Mp L2 D2 C2 Ro Vout iL2 Vin 圖3.10(1) : on , : off ,電感電流上升 第二個部分如圖3.10(2),當開關 截止時,電感需要一個導通路徑,因此 二極體 會導通,儲存在電感上之能量將釋放至輸出端給電容 ,即電感電流開 始下降, ,電容 再提供能量給負載。35 Vin Mp L2 D2 C2 Ro Vout iL2 -(Vin-Vout) 圖3.10(2) : off , : on ,電感電流下降 假若電感電流放完後開關 未即時導通,此時 與 均進入截止狀態, 如圖3.10(3)。 Vin Mp L2 D2 C2 Ro Vout 圖3.10(3) : on , : off ,電感電流下降到零開關尚未導通
3.2.1 Boost Converter 連續導通模式
圖 3.11 為升壓型轉換器在連續導通模式(CCM)下電感的電壓與電流特性圖, 開關導通時候,輸入電壓Vin 跨在電感上面,電感電流上升,開關截止時候, 電感對後端電容放電,電感電流下降。 IL2 VL2 ton toff T Vin Vin-Vout t 圖3.11 升壓型轉換器在 CCM 的電感 電壓與電流 IL2 VL2 DTs (1-D)Ts T Vin Vin-VoutA
B
t 圖3.12 升壓型轉換器在 CCM 的伏秒 平衡法則36 從伏秒平衡法則來推導輸入對輸出電壓的轉換比率,從圖3.12 來看 波形 對時間的積分總和為零,就是A 的面積等於 B 的面積,可得下式 1 3 1 整理後可得 1 1 3 13 從上式可知,當工作比率D=0 時,Vout=Vin ; 當 D=1 時,Vout = ∞,只 要D>0 都有昇壓 ,但是就實際電路而言,由於元件會存在有等效電阻,因此升 壓比率不可能太高,一般而言,最高大概五倍左右。
3.2.2 Boost Converter 不連續導通模式
假若Boost 操作在不連續導通模式時,電感電壓及電流波形如圖 3.13 可求得以 下關係式 . 3 1 整理可得 3 1 IL2 VL2 t D1Ts D2Ts T D3Ts 0 Vin Vin-VoutB
A
圖3.13 升壓型轉換器操作於 DCM 的電感電壓和電流37
3.2.3 Boost Converter CCM 與 DCM 的邊界條件
Boost Converter 究竟在什麼條件下會維持在 CCM,亦或是什麼條件下會轉到 DCM 我們可以藉由 CCM 與 DCM 的邊界條件來了解,圖 3.14 所示,當在邊界情 況下,可得電流最大值 . 3 1 且此時的電感平均輸出電流 3 1 . 3 1 如果電感電流大於此邊界條件則Boost converter 操作在連續導通模式(CCM), 反之Boost converter 操作在不連續導通模式(DCM)。 IL2 VL2 D1Ts (1-D1)Ts Ts Vin Vin-Vout t 圖3.14 升壓型轉換器在 CCM 與 DCM 邊界的電感電壓與電流 從輸入電壓與輸出電壓的角度來看 如果在CCM 中,則 1 3 19 如果在DCM 中,則 1 338
3.3 升降壓型轉換器(Buck-Boost Converter)
Buck-Boost 轉換器顧名思義就是可做升壓與降壓的轉換,事實上它也是由 Buck 和 Boost 串接組合而成,Buck-Boost 轉換器大約是在 1970 年代備發展來, 其結構如圖3.15 所示,其所用的元件個數與 Buck 和 Boost 相同,但是卻可以做 雙重的功能,不過缺點是開關必須承受Vin+Vout 較大的電壓應力,還有輸入電 源與輸出電壓不共地訊號。 Vin Mp L3 D3 C1 Ro Vout 圖3.15 升降壓型轉換器 其中操作原理可分為三個部分,第一個部分,如圖3.16(1),當開關 導通 時,二極體 會截止,此時輸入電壓會直接跨於電感 上, , 電感電流會直線上升。 Vin Mp L3 D3 C1 Ro Vout iL3 Vin 圖3.16(1) : on , : off ,電感電流上升 第二個部分如圖 3.16(2),當開關 截止時,電感需要一個導通路徑,因此 二極體 會導通,儲存在電感上之能量將釋放至輸出端給電容 ,即電感電流開 始下降,
,
電容 再提供能量給負載。39 Vin Mp L3 D3 C3 Ro Vout iL3 -Vout 圖3.16(2) : off , : on ,電感電流下降 假若電感電流放完後開關 未即時導通,此時 與 均進入截止狀態, 如圖3.16(3)。 Vin Mp L3 D3 C3 Ro Vout 圖3.16(3) : on , : off ,電感電流下降到零開關尚未導通
3.3.1 Buck-Boost Converter 連續導通模式
圖3.17 為升降壓型轉換器在連續導通模式(CCM)下電感的電壓與電流特性 圖,開關導通時候,輸入電壓Vin 跨在電感上面,電感電流上升,開關截止時 候,電感對後端電容放電,電感電流下降。 IL3 VL3 ton toff T Vin -Vout t 圖3.17 升降壓型轉換器在 CCM 的電 感電壓與電流 IL3 VL3 DTs (1-D)Ts T Vin -VoutA
B
t 圖3.18 升降壓型轉換器在 CCM 的伏 秒平衡法則40 從伏秒平衡法則來推導輸入對輸出電壓的轉換比率,從圖3.18 來看 波形 對時間的積分總和為零,就是A 的面積等於 B 的面積,可得下式 1 3 1 整理後可得 1 3 從上式可知,當工作比率D<0.5 時,轉換器為降壓轉換,當工作比率 D>0.5 時,轉換器為升壓轉換,而D=0.5 時 Vout = Vin。
3.3.2 Buck-Boost Converter 不連續導通模式
假若Buck-Boost converter 操作在不連續導通模式時,電感電壓及電流波形 如圖3.19 可得以下關係式 . 3 3 整理可得 3 Vin IL3 VL3 t D1Ts D2Ts T D3Ts 0B
A
-Vout 圖3.19 升降壓型轉換器在 DCM 的電感電壓和電流41
3.3.3 Boost Converter CCM 與 DCM 的邊界條件
Buck-Boost Converter 究竟在什麼條件下會維持在 CCM,亦或是什麼條件下 會轉到DCM 我們可以藉由 CCM 與 DCM 的邊界條件來了解,圖 3.20 所示,當 在邊界情況下,可得電流最大值 . 3 且此時的電感平均輸出電流 3 . 3 如果電感電流大於此邊界條件則Buck-Boost converter 操作在(CCM), 反之操作在(DCM)。 IL3 VL3 D1Ts (1-D1)Ts Ts Vin -Vout t 圖3.20 升降壓型轉換器在 CCM 與 DCM 邊界的電感電壓與電流 從輸入電壓與輸出電壓的角度來看可得 如果在 中,則 1 3 如果在 中,則 1 3 942
第四章
實驗機構和阻抗匹配轉換器設計概念
本章節將介紹本研究的實驗機構,壓電材料的規格,旋轉敲擊模式的設計概 念,阻抗匹配與最大功率輸出的概念和阻抗匹配轉換器的設計概念。4.1 實驗機構
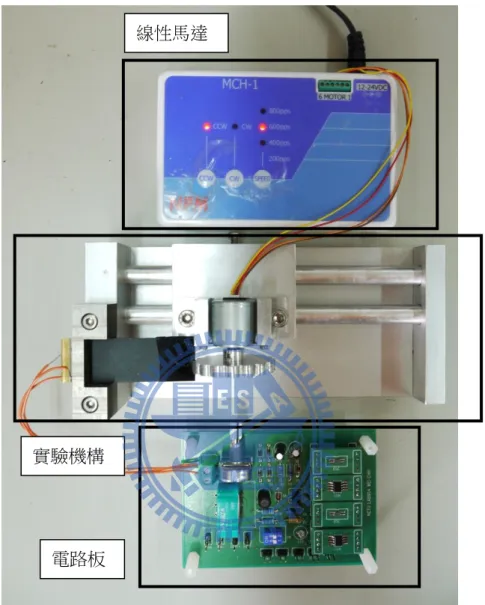
本研究的概念是利用轉動的機構帶動齒輪來敲擊壓電片,所以使用步進馬達 取代轉動的機構,例如:電風扇、腳踏車之類的機構,圖 4.1 為本研究設計的實驗 機構圖,包含馬達固定座,滑軌,壓電片,齒輪,以下會有詳細的介紹。 圖4.1 壓電發電機實驗機構43 圖4.2 壓電發電機實驗機構簡略尺寸圖 4.1.1 固定座: 如圖4.1 所示,本機構有三個固定座,第一個做為固定壓電片所用,第二個做為 固定線性馬達,第三個做為固定滑軌且為整個機構的基座。 4.1.2 滑軌: 為兩根長型圓柱體,做為調整步進馬達座與壓電片的距離。 4.1.3 馬達: 本研究使用NPM pfcu20 series 步進馬達,如圖 4.3,其用來取代轉動的機構,馬 達的每一圈有400 step 所以每一個 step angle=0.9 度,NPM pfcu20 series 步進 馬達,如表4.1,搭配了一個控制器 NPM,如圖 4.4,可控制順時針轉(CW)和逆 時針轉(CCW),有四種速度上的選擇。
a.800pps (pulses per second) 換算成轉速=120rpm b.600pps (pulses per second) 轉速=90rpm c.400pps (pulses per second) 轉速=60rpm d.200pps (pulses per second) 轉速=30rpm
44 圖 4.3 NPM 步進馬達[21] 圖 4.4 馬達控制器[20] 表4.1 馬達單圈的步階數與步進角[21] 4.1.4 齒輪: 如圖4.5 為齒輪,齒底圓直徑為 32mm 再加上齒型,其中齒型的設計是直徑 3.1mm 的圓弧,一圈有 16 個齒,齒型為圓弧的特點在於當齒輪在旋轉敲擊壓電 片時的施力點,可以保持在壓電片的最邊緣,使壓電片在同樣的力量下有最大的 彎矩(Bending Moment),詳細齒輪尺寸如圖 4.6。 圖4.5 齒輪 圖4.6 齒輪規格圖
45 4.1.5 雙層壓電片: 壓電材料有各式各樣的形狀,由於本研究的機構使用懸臂樑的架設方式,在壓電 片形狀的選擇上就必須採用壓電片,雙層(Bimorph)壓電片比起單層(Unimorph) 壓電片有更大的輸出電量,如圖 4.7,上下兩層為壓電陶瓷材料(PZT-5X),由於 壓電陶瓷為一種易碎材料,為了能讓壓電片承受更大的力量同時也保護它,所以 中間鑲上了一層黃銅,圖中線交叉區塊為銀極,可用來焊上電線。詳細壓電片規 格表列於表4.2。 PZT-5X BRASS L W SILVER Lb LS LP tP tb tP 圖4.7 雙層壓電片 表4.2 雙層壓電片規格 名稱 單位(mm) 名稱 單位(mm) L 60 W 20 LP 56 tP 0.3 Lb 4 tb 0.1 LS 3
46 在 2.2.1 我們也提到機電偶合因數,此一參數代表機械能(彈性能)與介電能 之間的互換能力,表4.3 可看出(PZT-5X)相較於其他種類的陶瓷材料有最佳的 轉換能力。 表4.3 各種 PZT 在 31-mode 下的機電偶合因數 PZT-4 PZT-5A PZT-5H PZT-7A PZT-5X k31 0.33 0.34 0.38 0.3 0.4 其他壓電片詳細參數列於表4.4。 表4.4 PZT-5X 的材料參數[23]
47
4.2 旋轉敲擊模式
本研究的主要概念是利用轉動來產生震動的效果,其方法是在一轉動的機構 上面,在轉軸上掛上一個齒輪,再利用齒輪旋轉敲擊壓電片,來達到發電的目的, 即是旋轉敲擊發電模式。y
x
0F
L
圖4.8 F 施力於壓電片的最末端 齒形的設計上,為了使齒在敲擊壓電片時,其施力點都維持在壓電片的最末 端,因為此時的彎矩最大,M=F× L,如圖 4.8 相對之下壓電片可產生較大的變 形量,而有較大的發電量,所以在齒形的設計上採用半徑為r的圓弧。r
1r
2r
圖4.9 齒輪 綜觀整個齒輪,可以看成是一個圓上長了許多個圓弧齒形,其中 代表著 齒輪內圓的半徑, 代表齒形加上齒內圓的半徑,如圖 4.9。48
y
x
0L
r
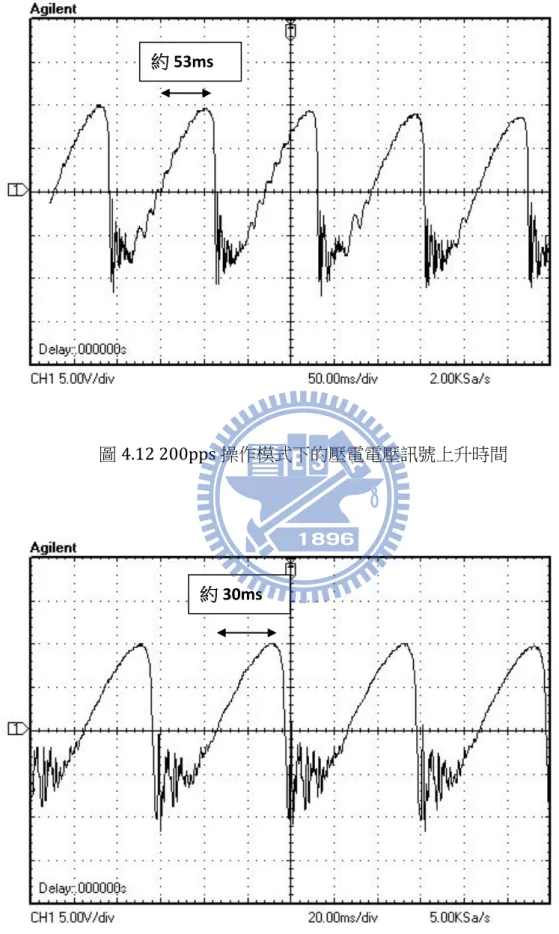
2 圖4.10 旋轉敲擊模式簡化示意圖 接下來為了使分析上更為容易,我們可以把每一個齒都想像成半徑為 的 棒子,假設壓電片為長度為L且撓度曲線為直線的棒子,如圖4.10 所示,所以 原本的齒輪可以看成很多根棒子在逆時針旋轉敲打著壓電片,當棒子轉動時,原 本是呈現水平狀態的壓電片受棒子的敲打帶動而往下,當齒移動到與長度L的壓 電片形成一個三角形時,如圖4.11,此時 表示齒輪上的齒可以敲擊壓電片的最 大角度,當齒在往下轉動時,壓電片即會往上彈繼續受到下一齒的旋轉敲擊。 L r2 d θ1 a 圖4.11 單齒可敲擊壓電片的最大角度示意圖 如圖 11 的三角形,透過餘弦定理可以求得單齒的最大接觸旋轉角 1 349 帶入本研究實驗機構的實際量測相關的參數 mm, 19mm, 3 mm 由 3 式可求得 約為10.7 (度) 如果是在(A)pps 的操作模式下齒輪每秒轉(A/400)× 360 度,轉動 10.7 度等 於需要10.7/((A/400)× 360)s,表示壓電片在此段時間內會受到齒輪的敲擊,電 壓會快速上升,之後壓電片會往上彈在繼續受到下一齒的敲擊,因此帶入步進馬 達的三種模式,可得到轉動10.7 度所需要的時間。 200pps : 轉動 10.7 度需要 59.4ms 400pps : 轉動 10.7 度需要 29.6ms 600pps : 轉動 10.7 度需要 19.8ms 因此可以預測壓電片在200pps 操作模式下,在受到敲擊的 59.4ms 時間內 電壓會快速上升,因此400pps 模式電壓的上升時間約為 29.6ms,600pps 模式 約為19.8ms,圖 14.12-14,為壓電片在三種操作模式下的電壓訊號圖,為一個 類弦波的交流電壓訊號,在齒輪敲擊壓電片的時間內,電壓快速上升,當齒輪過 了最大接觸旋轉角後,壓電片往上彈,電壓迅速往下掉,除了壓電片的自由震動 之外,在這期間內也受到下一齒的敲擊,所以此時電壓訊號呈現較高頻的震動。
50
圖4.12 200pps 操作模式下的壓電電壓訊號上升時間
圖4.13 400pps 操作模式下的壓電電壓訊號上升時間 約 53ms
![圖 1.1MIT Joe Paradiso 的研究團隊設計的壓電鞋[3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8516852.186233/17.892.269.625.111.396/圖11MITJoeParadiso的研究團隊設計的壓電鞋3.webp)
![圖 1.5 以 RFID 來實現網路伺服小孩上下學安全控管概念圖[4]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8516852.186233/19.892.249.645.122.379/圖15以RFID來實現網路伺服小孩上下學安全控管概念圖4.webp)