國
立
交
通
大
學
運 輸 科 技 與 管 理 學 系 碩 士 班
碩 士 論 文
多層引力模式求解高速公路起迄表:
Deming-Stephan-Furness 疊代程序之應用
研 究 生:許淳彧
指導教授:卓訓榮
中 華 民 國 1 0 1 年 0 7 月 2 9 日
多層引力模式求解高速公路起迄表:
Deming-Stephan-Furness 疊代程序之應用
Estimation of Freeway Origin-Destination Matrix by
Hierarchical Gravity Model: An Application of
Deming-Stephan-Furness Procedure
研 究 生:許淳彧 Student:Chun-Yu
指導教授:卓訓榮 Advisor:Hsun-Jung Cho
國 立 交 通 大 學
運輸科技與管理學系
碩 士 論 文
A Thesis
Submitted to Department of Transportation Technology and Management
College of Management
National Chiao Tung University
In partial Fulfillment of the Requirements
For the Degree of
Master
in
Transportation Technology and Management
July 2012
Hsinchu, Taiwan, Republic of China
多層引力模式求解高速公路起迄表:
Deming-Stephan-Furness 疊代程序之應用
學生:許淳彧
指導教授:卓訓榮
國立交通大學
運輸科技與管理學系碩士班
摘要
在運輸規劃、交通管理、收費費率制訂等領域中,起迄流量矩陣一直是一種
重要的輸入資訊。傳統的起迄流量矩陣資訊取得方式,如訪問、車牌登錄調查等,
所耗費的人力、物力龐大,且資料的時空涵蓋率和精確程度均有所缺陷。為了改
善上述調查缺陷,許多估計方式及數學模式相應而生,其中以引力模式尤其著名。
然,引力模式求解中所使用之單調(monotonic)性質的成本函數,無法有效地描述
旅行成本影響空間分布的非單調遞減行為。因此,本研究嘗試結合分層的概念於
引力模式上,並透過 Deming-Stephan-Furness 疊代程序進行求解。以起點、迄點流
量做為輸入變數,並符合路段流量差值最小,本研究所提出之估計方法不需要前
期資訊,並可用於靜態起迄矩陣估計之上。
由於高速公路並沒有已知的真實起迄流量矩陣,因此本研究為了瞭解所建立
之起迄流量矩陣推估方式之合理性,透過高速鐵路之起迄流量資訊進行分析。經
分析後,再將此模式應用於高速公路之起迄流量矩陣推估之上。於高速鐵路的路
網上進行驗證發現,透過本研究所提出之多階層引力模式,可獲得較低的估計誤
差平方差和。
Estimation of Freeway Origin-Destination Matrix by Hierarchical Gravity
Model: An Application of Deming-Stephan-Furness Procedure
Student:Chun-Yu Hsu
Advisors:Dr.
Hsun-Jung Cho
Department of Transportation Technology and Management
National Chiao Tung University
ABSTRACT
Origin-Destination matrix is an important information in transportation planning, traffic
management, and many other transportation researches. Traditional origin-destination
matrix estimation methods, i.e., interview and license plate survey, require tremendous
resources and hard to cover both temporal and spatial domains. Many mathematical
models are developed to improve the aforementioned deficiencies’, and the gravity
model is likely the most well-known among those. However, the monotonic cost
function involved in gravity model failed to describe the non-monotonic behavior on
how travel costs affect spatial distribution. Therefore, this study combined the
hierarchical concept into gravity model and solve the problem with
Deming-Stephan-Furness iterative process. With origin and destination flows as input
and targets to minimize the difference between observed and estimated link flows, this
method is able to estimate a static origin-destination matrix without prior information
about the target matrix.
In order to understand the result of the established method, this study compares the
estimated and real origin-destination matrix derived from Taiwan High Speed Rail.
Afterward, the method is implemented on the estimation of freeway origin-destination
matrix. As the numerical example derived from Taiwan High Speed Rail shows, the
hierarchical gravity model can achieve a lower estimation error.
誌謝
在論文即將付梓之日,回顧這些日子,由懵懂無知的大學生,跨進新的領域
學習交通專業知識與作研究的基本架構,承蒙老師與學長姐們的協助與啟發。對
於這麼多人的細心提拔與啟發,銘感五內。
感謝指導教授卓訓榮博士幾年來在學業上的協助與教誨,讓學生學習到獨立
思考自主學習的重要性。
感謝學長姐,協助學妹克服文獻閱讀與程式撰寫上的困擾。
感謝學弟們,在大家一同修課、讀書準備考試時作為精神上的夥伴。
最後也是最重要的,要感謝劬勞養育我、關愛我的父母,在成長、求學的過
程中的支持與體諒。
目錄
摘要 ... i
ABSTRACT ... ii
誌謝 ... iii
目錄 ... iv
表目錄 ... vi
圖目錄 ... viii
參數符號說明... ix
第一章、
緒論 ... 1
1.1 研究動機 ... 1
1.2 研究目的 ... 2
1.3 研究範圍 ... 2
1.4 研究方法及流程 ... 3
第二章、文獻回顧 ... 5
2.1 路段與起迄資料推估起迄矩陣 ... 7
2.2 引力模式 ... 16
2.3 最大概似法 ... 19
2.4 起迄矩陣推估之性質探討 ... 20
第三章、模式建構 ... 25
3.1 引力模式 ... 25
3.2 最大概似法 ... 38
3.3 DSF 求解起迄流量表之限制 ... 43
3.4 多層引力模式 ... 46
第四章、數值範例 ... 50
4.1 高速鐵路 ... 50
4.2 高速公路 ... 64
4.3 測試小結 ... 85
第五章、結論與建議 ... 86
5.1 結論... 86
5.2 建議... 87
參考文獻 ... 88
附錄一 ... 94
附錄二 ... 103
附錄三 ... 112
附錄四 ... 121
附錄五 ... 130
附錄六 ... 137
簡歷 ... 148
表目錄
表 1.1 參數名稱定義對照表 ... ix
表 3. 1 高速鐵路 2011 年 5 月 10-16 日之北上旅次真實流量表 ... 44
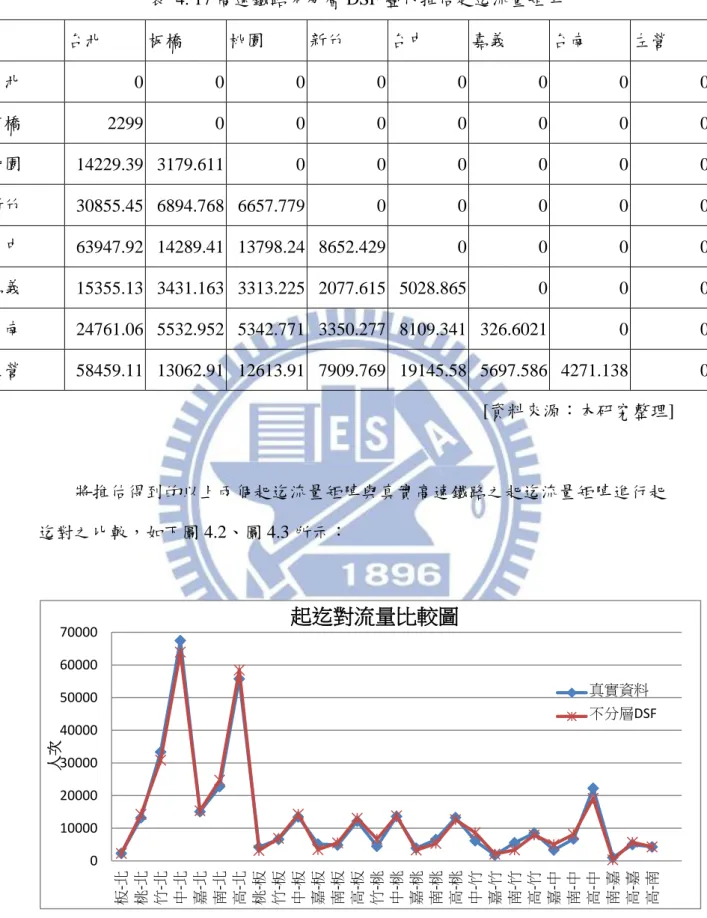
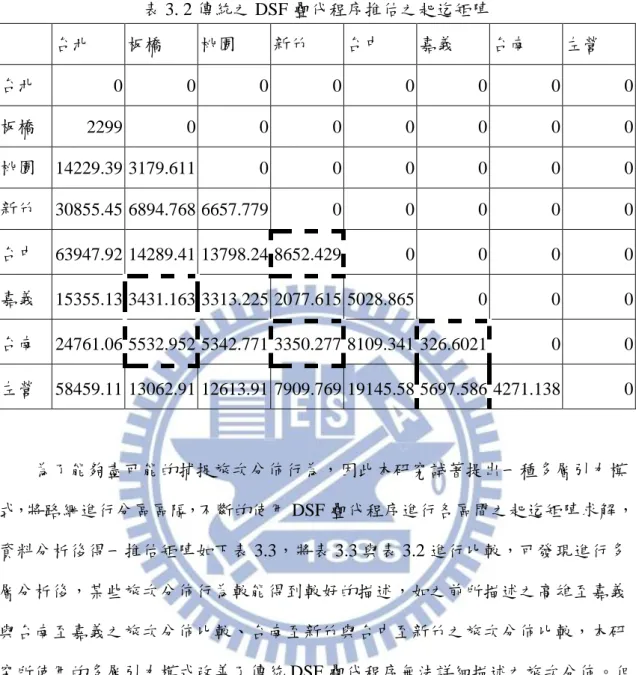
表 3. 2 傳統之 DSF 疊代程序推估之起迄矩陣 ... 45
表 3. 3 本研究預計使用之多層引力模式之推估起迄矩陣 ... 46
表 4. 1 高速鐵路 2011 年 5 月 10-16 日真實資料起迄流量表 ... 51
表 4. 2 高速鐵路 2011 年 5 月 10-16 日各站起點流量 ... 52
表 4. 3 高速鐵路 2011 年 5 月 10-16 日各站迄點流量 ... 52
表 4. 4 高速鐵路 2011 年 5 月 10-16 日北上起迄矩陣 ... 53
表 4. 5 高速鐵路 2011 年 5 月 10-16 日北上各站起點流量 ... 54
表 4. 6 高速鐵路 2011 年 5 月 10-16 日北上各站迄點流量 ... 54
表 4. 7 高速鐵路 2011 年 5 月 10-16 日南下起迄矩陣 ... 55
表 4. 8 高速鐵路 2011 年 5 月 10-16 日南下各站起點流量 ... 56
表 4. 9 高速鐵路 2011 年 5 月 10-16 日南下各站迄點流量 ... 56
表 4. 10 推估高速鐵路 2011 年 5 月 10-16 日之旅行距離矩陣... 57
表 4. 11 高速鐵路之分區重心表 ... 58
表 4. 12 高速鐵路分區旅行成本表 ... 58
表 4. 13 高速鐵路北上分層分區推估起迄流量表 ... 59
表 4. 14 高速鐵路北上各站至各區之推估起點流量表 ... 59
表 4. 15 高速鐵路各站至各區之推估迄點流量表 ... 60
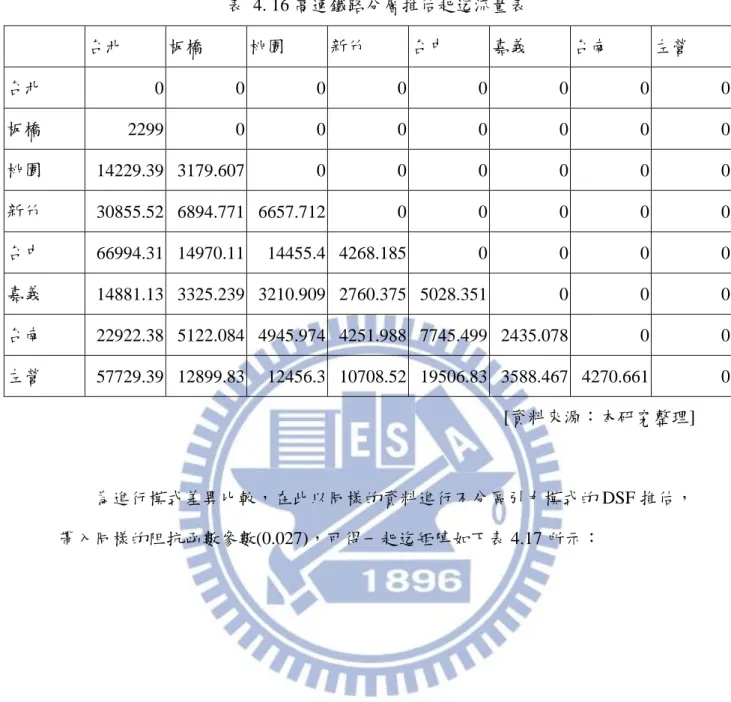
表 4. 16 高速鐵路分層推估起迄流量表 ... 61
表 4. 17 高速鐵路不分層 DSF 疊代推估起迄流量矩陣 ... 62
表 4. 18 分層 DSF 與不分層 DSF 推估起迄流量表之平方差和 ... 63
表 4. 19 國道一號收費站一覽表 ... 65
表 4. 20 國道三號收費站一覽表 ... 66
表 4. 21 國道一號分區各區重心位置表 ... 67
表 4. 22 國道一號分區之重心距離表 ... 68
表 4. 23 國道一號之分區一覽表 ... 69
表 4. 24 國道一號第二層南下分區之各區間阻抗函數參數 ... 70
表 4. 25 國道一號第二層北上分區之各區間阻抗函數參數 ... 70
表 4. 26 國道一號第三層南下分區之各區間阻抗函數參數 ... 70
表 4. 27 國道一號第三層南下分區之各區間阻抗函數參數 ... 71
表 4. 28 國道三號分區各區重心位置表 ... 76
表 4. 29 國道三號分區之重心距離表 ... 76
表 4. 30 國道三號之分區一覽表 ... 77
表 4. 31 國道三號第二層南下分區之各區間阻抗函數參數 ... 78
表 4. 32 國道三號第二層北上分區之各區間阻抗函數參數 ... 78
表 4. 33 國道三號第三層南下分區之各區間阻抗函數參數 ... 79
表 4. 34 國道三號第三層南下分區之各區間阻抗函數參數 ... 80
圖目錄
圖 1. 1 研究方法與流程 ... 4
圖 4. 1 高速鐵路路網結構示意圖 ... 51
圖 4. 2 高速鐵路真實起迄流量與不分區引力模式推估起迄流量比較圖 62
圖 4. 3 高速鐵路真實起迄流量與分層引力模式推估起迄流量比較圖 .... 63
圖 4. 4 國道一號三層之多層引力模式推估矩陣三維流量圖 ... 72
圖 4. 5 國道一號傳統引力模式推估矩陣三維流量圖 ... 73
圖 4. 6 國道一號雙層之多層引力模式推估矩陣三維流量圖 ... 73
圖 4. 7 國道一號三層之多層引力模式推估矩陣三維流量圖俯視圖 ... 74
圖 4. 8 國道一號傳統引力模式推估矩陣三維流量圖俯視圖 ... 74
圖 4. 9 國道一號雙層之多層引力模式推估矩陣三維流量圖俯視圖 ... 75
圖 4. 10 國道三號三層之多層引力模式推估矩陣三維流量圖 ... 81
圖 4. 11 國道三號傳統引力模式推估矩陣三維流量圖 ... 82
圖 4. 12 國道三號雙層之多層引力模式推估矩陣三維流量圖 ... 82
圖 4. 13 國道三號三層之多層引力模式推估矩陣三維流量圖俯視圖 ... 83
圖 4. 14 國道三號傳統引力模式推估矩陣三維流量圖俯視圖 ... 83
圖 4. 15 國道三號雙層之多層引力模式推估矩陣三維流量圖俯視圖 ... 84
參數符號說明
下表列出本研究所使用的參數符號及其定義對照。
表 1.1 參數名稱定義對照表
符號
定義
W = W
{
N,
W
M,
W
S}
整體路網分割成 N, M, S 三區
W
N=
{
1, 2, 3,
, l
}
N 區的路網中有 l 個交流道
W
M=
{
l
+
1, l
+
2, l
+
3,
, l
+
m
}
M 區的路網中有 m 個交流道
W
S=
{l
+
m
+
1, l
+
m
+
2,
l
+
m
+
3,
, l
+
m
+
n}
S 區的路網中有 n 個交流道
O
i交流道 i 上匝道流量
D
j交流道 j 下匝道流量
c
i交流道 i 里程位置
O
k路網分區 k 的起點需求
D
k路網分區 k 的迄點需求
C
k路網分區 k 的重心位置
O
igh由分區 g 至分區 h 的交流道 i 起點流量
D
j gh由分區 g 至分區 h 的交流道 j 迄點流量
d
ij gh由分區 g 之交流道 i 至分區 h 之交流道 j
之間的距離
ijd
交流道 i 至交流道 j 的距離
ijc
起點 i 至迄點 j 的成本
)
(
c
ijF
起點 i 至迄點 j 的阻抗函數
ijF
起點 i 至迄點 j 的阻抗值
T
gh由分區 g 至分區 h 的總旅次
T
ij gh由分區 g 至分區 h 的各交流道間旅次
ij
T
~
先期(歷史)起迄矩陣之各交流道間旅次
v
s
a於路段 a 上流量為 v 時之成本
ijkh
由起點 i 至迄點 j 使用路徑 h 的流量
a ijk
一個 0 – 1 變數,描述由起點 i 至迄點 j
之路徑 h 是否使用路段 a
F
Nguyen(1977)使用者均衡路網起迄估計模
式之目標式最佳值。
第一章、 緒論
1.1 研究動機
車輛起迄流量表一直以來一直在運輸規劃、交通管理的領域扮演不可或缺的
角色。而高速公路車輛起迄流量表更一直是高速公路營運、管理與規劃十分重要
的一環,對於了解旅行時間、流量容量比、平均速率、總油耗等研究,乃至於預
計於 2013 年實行的高速公路計程收費費率研究,均須要有高速公路車輛起迄流量
表方能進行進一步的分析。傳統的高速公路車輛起迄流量表之資訊蒐集取得方法,
包含有路邊訪問、車輛牌照登錄、郵卡問卷、電話訪問、錄影或照相偵測、車輛
標記、車輛追蹤、人口普查、匝道收費等,但以上幾種方法之資料收集過程各有
其困難,耗費許多時間、經費與人力資源,每種調查方式的資料的精確度也不同,
更重要的是,這些調查方法所提供的資料性質亦不相同,故有很多應用無法透過
這些種類的調查方法取得。為了能夠改善傳統調查方式的耗費資源以及資料不完
整的缺陷,本研究希望透過構建一個數學模式,使用上下匝道及主線之偵測器流
量資料,進行高速公路起迄流量表的推估,期望能得到一個精確的答案。
過去研究起迄流量表常碰見的問題,諸如無解、存在無限多組解、解之正確
性爭議等。其中在求解過程中,經常使用引力模式,但是在求解時所使用的單調
(monotonic)性質之成本函數,無法有效將旅行成本影響空間分布的非單調遞減
行為描述出來。故為了有效的描述這種非單調性的行為,許多引力模式在校估的
過程程中採用多影響因子(factor)的模式估計起迄流量表,但是這種多影響因子
的方法相對無法取得相關的資料。
1.2 研究目的
起迄流量是交通規劃四步驟當中一項重要項目,而高速公路車輛起迄流量表
更是高速公路設計與管理的主要參考依據。為了探討高速公路之各項資訊所推估
起迄流量表模式,本研究擬以國道一號、三號之偵測器上下匝道流量、主線路段
流量所提供之資料進行模式的構建以及可行性的探討。期望能透過比傳統起迄調
查法更低成本的車輛偵測器流量資訊(與比較)
,提出可靠的數學模式進行高速公
路車輛起迄推估。
再者,由於高速公路沒有已知的起迄流量表,故無法進行推估之起迄流量表
之正確性驗證。故為了驗證模式可以推估較接近真實流量行為之起迄流量表,預
計使用高速鐵路之起迄流量資訊進行驗證。
故希望透過本研究可以得到以下之目的:
1. 對於起迄流量表之研究方法進行回顧。
2. 透過整理分析,由各種過往的研究方法中提出一較可行、符合研究範圍與資料
型態之模式。
3. 使用已有完整起迄流量資訊之高速鐵路資料,驗證模式可行性。
4. 將高速公路資訊代入模式得到一高速公路起迄流量表。
1.3 研究範圍
本研究之研究範圍因研究目的為建構高速公路車輛起迄流量表之推估模式,
故已先將範圍侷限於國道高速公路。國道高速公路包含西部南北向之一號與三號,
西部東西向之二號、四號、六號、八號、十號,東部有連結台北至宜蘭的國道五
號,其中國道一號與三號貫穿台灣西部,北至基隆,南至高雄、屏東,且使用率
高,故選用國道一號與三號作為研究範圍。
1.4 研究方法及流程
本研究之研究方法與流程如下所述:
1. 界定本研究所採用之問題與研究目的
2. 針對研究議題進行文獻資料蒐集
3. 蒐集高速公路車輛偵測器等資訊並加以整理,分析成為模式可輸入之資
料。
4. 建構起迄推估模式並進行模式參數校估、比較。
5. 分析各起迄推估模式的特性。
如下圖 1.1 所示。
文獻資料蒐集
研究問題界定
高速公路資料蒐集分析
起迄推估模式構建
起訖推估模式測試
模式參數校估
結論與建議
圖 1. 1 研究方法與流程
[資料來源:本研究整理]
迄
第二章、文獻回顧
如何取得正確且可靠的起迄流量矩陣,一直以來都是交通規劃與操作管理方
面面臨的重大挑戰。起迄流量矩陣包含了由某一區域至另一區域的人數、貨物商
品數、或運具數等。起迄資訊對於交通規劃、營運操作都扮演不可或缺的角色。
因此,起迄流量資訊推估的研究受到許多研究者的重視,並投注了很多的關注於
此一議題上,進而開發出各種直接與間接的起迄流量估計方法。
起迄流量矩陣的估計可以區分為靜態與動態兩大類。在靜態的起迄估計模式
中,假設在整個估計的研究時間段中,起迄的需求呈現一種均衡且穩定的狀態。
因此,此靜態的起迄估計模式多使用日交通量或小時交通量作為估計的基準。反
之,動態的估計模式(或稱依時性(time-dependent)起迄估計)
,則嘗試描述起迄
流量矩陣隨著時間的動態變化情況,希望能更加清楚的描述真實的交通需求變化
狀況。然而,本研究專注在高速公路全天整體路網之交通需求分析,因此將著重
在靜態起迄推估之文獻與模式上。
若要透過調查或訪談的方式取得起迄矩陣,不僅成本高昂且調查資料取得不
易。若是透過交通量資料的方式進行估計,則常因限制式不足而導致估計結果是
由多個可能的起迄矩陣當中挑選一個符合某種行為假設的合理值。
取得某個區域之起迄陣列最直接的做法是直接抽樣再以統計方法進行估計,常
見的起迄需求調查方式通常是透過家戶訪問或者是車牌抄錄等做法。在實務上,
受調查時間的限制,通常只有部分的車牌能夠被記錄到。在這種狀況下,不僅有
統計上的標準抽樣誤差需要考慮,由車牌抄錄錯誤或是調查時間不足而產生的誤
因為知道了誤差可能的來源,因此有許多學者針對這些可能的誤差來源進行了
回顧與分析。Watling 和 Maher 結合旅行時間的資訊,針對車牌比對的結果除去
真實情況下不可能發生的旅次(Watling and Maher, 1992)
。而隨著科技的發展,車
牌調查的方式逐漸被自動車牌辨識系統所取代,Dixon 和 Rilett 針對自動車牌辨
識系統與交通量的資訊進行整合,並用以推估起迄矩陣(Dixon and Rilett, 2002;
Dixon and Rilett, 2005)
。Oliveira-Neto 等人更進一步使用車牌辨識機制加入權重性
距離(weighted edit distance)的考量,於線上的狀況進行車牌比對(Oilveira-Neto
et al, 2012)
。雖然以上幾種方法均可以降低車牌調查的誤差來源,然而,車牌調查
的成本依舊高昂。儘管有自動車牌辨識設備,其佈設數量與準確度仍有改良空間。
本論文所研究的重點在於靜態的起迄矩陣估計,因此文獻回顧將專注在靜態起
迄估計的方法回顧上。將目前所整理出的相關文獻進行統整,故本章節的編排如
下:
2.1 路段與起迄資料推估起迄矩陣
2.2 引力模式
2.3 最大概似法
2.4 起迄矩陣推估之性質探討
2.1 路段與起迄資料推估起迄矩陣
在傳統運輸規劃的交通需求模式當中,包含有四個步驟,分別為旅次產生(Trip
Generation)
、運具選擇(Mode Split)
、旅次分佈(Trip Distribution)及路徑指派(Route
Assignment)
。這個流程當中的旅次產生以及分佈合併起來,即為估計起迄分佈的
一個方式。針對傳統的運輸規劃的流程,於許多資料中可以獲得詳盡的說明。
(Hutchinson, 1974 ; Meyer, 2001)
旅次產生的過程是針對區域的旅次產出(Productions)以及吸引(Attractions)
進行估計,這個步驟一般多使用統計回歸模式以進行預測。而校估這個模式的過
程會需要每個分區的社經資料以及真實的旅次產生量或吸引力,經由基年的資訊
回歸之後,用於預測目標年的交通需求。而此交通需求,可再經由旅次分佈的步
驟分配到不同的起迄對上。最常見的分配方法是引入旅次與距離的關係,假設
T
ij的
分布與距離成反比,如
T
ijµ
1
d
ija(1)
其中
T
ij代表由區域 i 前往區域 j 的交通量,
d
ij代表某種 i 到 j 的分隔程度。這種方
式與牛頓的萬有引力觀念近似,Wilson 在文章當中,說明了這種引力的關係式與
最大熵的觀念可以得到相同的模式(Wilson, 1970)。關於引力模式的部分將在 2.3
小節進行說明。
由於路網上的路段流量所產生的限制式與起迄矩陣的未知數個數相差太多,
無法透過路段流量的限制產生一組起迄矩陣的唯一解,因此 Wilson 嘗試代入最大
熵的觀念,期待可以得到一組最有可能的起迄矩陣,其計算觀念為
1
.
1
ln
max
ij ij ij ij ij ij ij ij ijp
t
t
p
t
s
p
p
(2)
其中
t
ij是欲推估的起迄矩陣(Wilson, 1970)
。此關於系統狀態空間透過排列組合之
推導過程可參考 Snickars 的文章(Snickars, 1977)。關於最大熵模式的部分將在
2.1.3 小節進行說明。
2.1.1 比例指派
若路網上的旅行時間可以忽略不計,或路段旅行時間與流量無關,則交通量
指派矩陣可以為一外生變數,並經由模式外部所計算而得。Willumsen 最早提出結
合比例指派矩陣與最大熵的靜態起迄矩陣估計(Willumsen, 1981)。Cascetta 則是
以 最 小 平 方 法 的 架 構 描 述 比 例 指 派 矩 陣 方 法 之 起 迄 矩 陣 與 路 段 流 量 的 關 係
(Cascetta, 1984)。此靜態起迄矩陣的作法,後續還有一些學者繼續研究並加以改
善,包含 Bell、McNeil 與 Hendrickson、Brennigner-Gothe 等人以及 Lo 等人(Bell,
1983; Bell, 1991a; McNeil and Hendrickson, 1985; Brennigner-Gothe et al., 1989; Lo et
al., 1996)
。
當路網上的旅行時間無法忽略不計時,指派矩陣最常見的作法是使其符合
Wardrop 的使用者均衡法則(User equilibrium) (Wardrop , 1952)
。而起迄矩陣的估
計即成為旅次需求與交通量指派的整合模式。
Nguyen 最早提出結合均衡指派的起迄矩陣估計模式,將路段成本概念代入起
迄估計中,對問題的特性進行分析,所產出的起迄矩陣估計結果在指派到路網上
後,將會符合路段流量觀察值(Nguyen , 1977)
。Jornsten 與 Nguyen 延伸使用者均
衡指派的概念,並結合最大熵的觀念求取起迄矩陣(Jornsten and Nguyen, 1979)。
LeBlanc 與 Farhangian 結合使用者均衡的概念與最小平方法的概念(LeBlanc
and Farhangian, 1982)
,其最小平方法的概念來自於 Gur 等人的文章(Gur et al.,
1980)
,此概念核心在於找到一個起迄矩陣,其擁有使用者均衡的特性而且與先期
起迄矩陣最近似。此模式之概念如下:
min
tijt
ij-
t
ij(
)
2 ijå
s.t.
s
a( )
v
dv
0 vaò
aå
-
c
ijt
ij ijå
=
F
h
ijk kå
=
t
ij"
i, j
v
a=
d
ijka×
h
ijk ijkå
"
a
t
ij, h
ijk³
0
(3)
其中
s
a( )
v
dv
0 vaò
aå
-
c
ijt
ij ijå
=
F
(4)
即是 Nguyen 所提出的均衡模式目標值(Nguyen, 1977)。關於最小平方法的部分
將在 2.1.4 小節進行說明。
Jornsten 與 Nguyen 和 LeBlanc 與 Farhangian 文章的最大差異在於起迄矩陣的
選取方式。由於相同的路段流量可能由不同的起迄矩陣產生,Jornsten 與 Nguyen
的模式以最大熵的概念計算了最有可能的起迄矩陣;而 LeBlanc 與 Farhangian 的模
式則是將先期起迄矩陣(可由調查所得)的資訊納入考量,計算出與先期矩陣最
相近的起迄矩陣(Jornsten and Nguyen , 1979; LeBlanc and Farhangian, 1982)。
Van Zuylen 與 Willumsen 提出了結合路段上所觀察到的流量與最大熵概念的起
迄矩陣估計模式,其方法所求得的起迄矩陣在被指派到路網上時,所產生的路段
流量將與路段流量的觀察值相同。這個符合最大熵法則的模式,所推導出之模式
與引力模式相符合(Van Zuylen 與 Willumsen, 1980)。
Fisk 延伸 Van Zuylen 與 Willumsen 的模式,並將之加入使用者均衡(user
equilibrium)與成本的觀念以用於擁擠的路網上。其使用者均衡的觀念引自於 Smith
的文章,以變分不等式 (Variational inequality)的方式描述使用者均衡(Fisk , 1988;
Van Zuylen 與 Willumsen, 1980; Smith, 1979)
。
Fisk 將起迄矩陣估計的問題建模成一個雙層結構 (Bi-level structure)
,上層
的部份是熵最大化而下層的部份則是求解一個使用者均衡問題,其模式結構如下
min
tij, hijkt
ij´
(
ln t
( )
ij-
1
)
ijå
s.t.
C h
( )
×
(
f
-
h
)
³
0
"
f
h
ijk kå
=
t
ij"
i, j
ˆv
a=
d
ijka×
h
ijk ijkå
"
a
Î
A
ˆ
t
ij, h
ijk³
0
(5)
其中
C h
( )
是路徑在
h
流量下的成本,而
f
是可行路徑流量解(Fisk , 1988)。
若路網上所觀察到的流量形態符合使用者均衡的流量形態,則 Fisk 的模式將
會得到與 Erlander 等人和 Fisk 與 Boyce 所提出的旅次分佈與指派整合模式
(Combined trip distribution/assignment model) 相同的解(Erlander et al., 1979; Fisk
and Boyce, 1983)
。
上述之結合均衡指派於靜態起迄矩陣估計的方法,後續還有多位學者持續研
究發展。Bell 結合了路段流量觀察值與 Logit 隨機指派模式(Bell, 1983)
。Kawakami
等人延伸了 Fisk 與 Boyce 的模式,將車種的考量變更為兩種,並將此模式應用於
日本名古屋的都市路網之上 (Kawakami et al, 1992; Fisk and Boyce, 1983)
。Florian
與 Chen 和 Yang 則將問題構建成雙層的結構,上層的部份為最小平方法(結合先
期起迄矩陣資料)
,下層的部分為使用者均衡指派(Florian and Chen, 1992; Yang,
1992)
。Sherali 等人建構了一個線性規劃模式結合路段流量與使用者均衡架構,同
時此文獻並說明了觀察到的路網流量往往與使用者均衡並不一致(Sheraliet al.,
1994)
。Sen 與 Smith 的書中,針對社會科學上的熵應用進行了完整的討論(Sen and
Smith , 1995)
。
運輸規劃模式推估起訖矩陣的作法,往往直接或間接隱含旅次的行為是符合
某種旅次分佈的模式。這意味著要使用這些旅次吸引、旅次產生、分區特性等模
式,會需要經過某些資料搜集,並以基年的資料作為模式校估的基準,再以此校
估的參數進行近期的模式推估。但由於這些模式的輸入參數通常包含各種社會經
濟參數,這些參數往往搜集不易且成本高昂,更使得這些模式難以被實際應用。
結合使用者均衡指派的起迄估計模式在往後的研究中通常被建模成雙層問題
(Bi-level problem),而此種雙層問題在理論分析與計算上,往往因為其不具有凸
2.1.3 最大熵模式
熵(Entropy)為德國物理學家 Clausius 所提出的熱力學第二定律,該定律意
味著當一個熱力學系統達到最終平衡狀態時,其系統之熵值將達到最大(Clausius,
1855)
。A. G. Wilson 率先將此最大熵觀念應用在運輸模式上,並以此概念嘗試找
出一個最可能的旅次分佈矩陣為目標。由於許多不同的系統狀態均可以得出同一
組觀察值(起迄對流量,
T
ij)。若假設各系統狀態發生的機會相同,就可以藉由找
出某一組發生機率最大的
T
ij,作為起迄推估結果。此模式之一般型式為:
ij ij ij i j ij j i ij ij ij ijC
c
T
D
T
O
T
t
s
T
T
Min
.
ln
(6)
其中
ijT
: 起點 i 到迄點 j 的旅次量。
iO : i 區旅次的總產生量。
jD
: j 區旅次的總吸引量。
ijc
: 由起點 i 到迄點 j 的成本。
C: 所有旅次的總成本。
令
W
T
ij代表能產生起迄對流量
T
ij的系統狀態數,可以得到
ij ij T T T T T T T T T ijT
T
T
T
T
T
T
T
T
T
T
T
C
C
C
T
W
!
!
!
!
!
!
!
!
12 11 12 11 11 11 1 3 1 2 1 1 1 2 1 1 1 1
(7)
找出可將 W 最大化之{T
ij},使用一單調(monotonic)之 W 的公式可達到此目的,
如下式所示:
ij ij ij ijT
T
T
T
W
ln
!
ln
!
!
!
ln
ln
(8)
因由
Stirling’s approximation 可知
X
X
X
X
!
ln
ln
(9)
故可簡化如下
ij ij ij ijT
T
T
T
W
ln
!
(
ln
)
ln
(10)
將常數 ln T!省略,即可得一可視為熵公式的方程式如下
ij ij ij ijT
T
T
W
'
(
ln
)
ln
(11)
整理限制式(2-10, 2-11, 2-12)與式(2-13)帶入 Langrangian 之方程式求
L
最
大值,可得
ij ij ij j i j j i j i iO
Tij
D
Tij
C
T
C
W
L
log
'
'
"
(12)
再次對
T
ij進行一次偏微分,
0
''
'
log
ij j i ij ijc
T
T
L
(13)
故
i j ij
i
j
ij
ijc
c
T
exp
'
"
exp
'
exp
"
exp
(14)
將上式 (2-17) 帶入(2-10)式及(2-11)式,可得
exp
1exp
j ij j i iO
c
(15)
1exp
exp
i ij i j jD
c
(16)
令
j j j i i iD
B
O
A
exp
exp
(17)
則
T
ij可表示為
ij
j j i i ijA
O
B
D
c
T
exp
(18)
因此結合熵模式之引力模式之參數
A 與
iB
j為
i ij i i j j ij j j ic
O
A
B
c
D
B
A
exp
1
exp
1
(19)
(Wilson A. G., 1967)
2.1.4 最小平方法
最小平方法之基本假設為推估值與調查值具有不偏誤性。以目標函數之值最
小為目標,將先期起迄分佈矩陣與路段流量作為輸入值,求得與先期起迄分佈矩
陣最接近之估計分佈矩陣。此模式可提供估計信賴區間,提供一個估計準確性作
為參考依據,但需注意推估結果的正確性與先期起迄分佈矩陣之相關性極高。模
式之一般式為:
PT
f
t
s
f
f
Z
f
f
T
T
Z
T
T
Min
T T
.
1 1(20)
其中
的協方差矩陣
:
的協方差矩陣
:
的比例
:起迄點使用特定路段
:估計的路段流量
:觀察的路段流量
:估計的旅次分佈矩陣
:先期的旅次分佈矩陣
f
W
T
Z
P
f
f
T
T
Cascette 透過結合經由交通指派的直接或是模式推估的路段交通量,同時考慮
流量之測量誤差及時間變異性,以最小平方法進行起迄分佈矩陣之推估,但未說
明協方差矩陣(Covariance matrix)之求解方式(Cascette, 1984)。
Kuwahara 等人針對路側調查資料用於起迄矩陣估計的方法進行研究,並提出
包含簡單最小平方和、抽樣率加權最小平方和、起迄比例加權最小平方和等估計
方法。該研究亦針對其所提出的方法進行效度分析與敏感度分析,但該研究並未
指出何種估計方式最佳,而是認為選擇的方式需要根據路網結構、抽樣策略以及
樣本才能決定(Kuwahara et al., 1986)。
Bell 提出一種結合車隊擴散模式的起迄估計方法。由於傳統靜態矩陣的估計方
式,大多假設車輛行駛的時間和研究範圍相比之下可忽略,因此所有同樣時間點
出發的車輛會在同樣的時間抵達終點。Bell 則是將車隊擴散模式納入考量,車隊擴
散模式描述了由同樣時間點出發的車隊,會隨著時間的通過,而有逐漸擴散的現
象,並且造成了抵達相同地點的車輛會有不同的旅行時間。此研究中先建立一模
式,並假設旅行時間與幾何型態有關,但此模式僅適用於小路網的估計。此研究
亦建立另外一適用於高速公路的模式,但該模式需要較多的參數而產生複雜的參
數估計過程(Bell, 1991)。
2.2 引力模式
引力模式(Gravity models),是將牛頓的萬有引力模式
2r
GMm
F
(21)
應用在旅次分布的預估上。其中 F 為兩物體間的萬有引力;M 與 m 分別為兩物體
之質量,r 為兩物體之間之距離;G 為重力常數。
Reilly 首先將牛頓之萬有引力模式轉換,將兩個城市間之引力以一轉化點
(Breaking point)表示,定義出零售的萬有引力定律(Law of the retail gravitation),
兩個城市吸引任何介於中間之鄰近地區之零售業之轉化點,將會近似該二城市的
人口比例與該二城市與中間鄰近地區之城市之距離平方反比,用公式表現其概念
如下,
2 11
p
p
d
BP
(22)
BP
為轉化點(Breaking point), d 為此二目的城市之距離,
p
1與
p
2為兩目的城市
之人口數(Reilly, 1931)。
Casey 進一步的運用引力模式進行旅次量分析,其方法如下
2 ij j i ijd
P
P
T
(23)
其中
T
ij為起點 i 至迄點 j 之旅次量,
P 與
iP
j分別為起點與迄點之人口數量,d
ij為
起點 i 與迄點 j 之間的距離;
為比例參數(Casey, 1955)。但此萬有引力分析方
式很快就被發現無法精確的表現旅次量,於是後續改良使用
O 與
iD
j取代人口數,
並使用一參數 n 校估作為
d
ij的指數,而非原本的平方關係。
引力模式自發展以來,持續受到學術界的關注與研究。Kirby 回顧了應用局部
矩陣技巧時所需要的理論背景,以及方式所適用與不適用之環境,以局部矩陣的
方式進行引力模式之起迄矩陣之推估,並以此推估起迄矩陣校估引力模式之參數。
但是由於局部矩陣正確性之觀察仍有不足,實際抽樣資料的良好性待確認,亦不
知參數之表現好壞(Kirby, 1979)。
Day 與 Hawkins 建構一個與 Kirby 互補的模式,以多個局部的矩陣與經驗值的
阻抗函數完成起迄推估矩陣,並以此推估之起迄矩陣校估引力模式之參數。當校
估所得之引力參數不盡相同,但還是可以用於產生一組相似的起迄矩陣,但此參
數非唯一的狀況不適合用於成本變化—旅次變化的分析(Day and Hawkins, 1979;
Kirby, 1979)
。
Maher 針對引力模式之阻抗參數進行探討。當使用局部矩陣時,會使部分參數
無法判斷。為克服因此代入使用先期起迄推估資料之貝氏估計法修正校估方式,
並與最小平方法進行比較(Maher, 1983)。
Duffus 等人探討引力模式用於預估起迄流量估計時的可靠度。透過分析橫跨
二十年間(1962 至 1981)共計四次的起迄調查資料,其研究發現,對於描述旅行
時間(阻抗函數)的參數(F-factor)來說,穩定度良好,可做為預測之用。但是
對於描述社經資訊的參數(K-factor)
,變化程度很大,作為預測之用時將產生很大
的偏誤(Duffus et al., 1987)。
Samata 等人探討冪次阻抗函數的引力模式數學性質,並發現在起點產生量及
迄點吸引量的條件下,旅次分佈(
T
ij)僅與阻抗函數的參數有關。而當此參數趨
近於無限大時,將可用兩個分別與產生量和吸引量相關的參數估計起迄流量
(Samata et al., 2006)。
在過去的文獻中(Dickey et al., 1983; Ortuzar and Willumsen, 2001),對於小
型至中型城市校估引力模式所需的樣本數量約為總旅次的 10%;對於大型城市(人
口數超過一百萬人)所需的樣本數量為人口的 4%。然而,大樣本意味著調查成本
高昂,因此,Murat 針對校估引力模式所需的樣本數量進行探討,並在某些前提假
設下提出一建議數量:針對每種旅次目的(如:住家—工作, 住家—學校, 住家—
其他, 非住家相關)各取得 1000 個樣本,即可校估出可接受的引力模式參數(Murat ,
2010)
。
2.3 最大概似法
最大概似法為英國統計學家 Fisher 所提出之統計方法(Fisher, 1912)。Van
Zuylen 在假設已知路網上之路段流量的狀況下,使用路段流量與先期起迄矩陣推
估最有可能之起迄矩陣,該模式可使用於改善先期起迄矩陣(Van Zuylen, 1980)。
Spiess 在已知路段流量,假設抽樣調查之起迄流量分佈為 Poisson 分配,並以
最大概似法進行起迄矩陣之推估。根據最大概似的基礎,假定每個起迄對的流量
平均值為
ijT
ij,則起迄矩陣為
T
t
ij的機率如下,
j i i j ij T t ij ij ij ijt
e
T
t
t
ij ij ij , ,!
Prob
Prob
(24)
透過由 Wilson 文章中所應用之最大概似估計技巧(Wilson, 1976),可將模式改寫如
下
a a ij a ij ij ij a ij ij ij ij ij t ij ij ij ijP
t
T
f
P
T
t
s
t
T
T
Max
ij
.
.
!
exp
(25)
其中
乘數
路段流量限制式的拉式
:
已知
之交通量
:路段
已知
的比例
使用路段
:旅次
已知
:抽樣調查的起迄資料
未知
的旅次
到終點
:起點
已知
:抽樣比例
a
a
f
a
j
i
P
t
j
i
T
a a a ij ij ij ij
)
(
)
(
)
,
(
)
(
)
(
)
(
此模式的判斷準則為概似值,當概似值愈大時,意味推估所得的起迄矩陣也
愈佳(Spiess, 1987)。
Nancy 使用預測誤差與最大概似法進行交叉路口轉向與直進之流量估計。由於
模式中將交叉路口上之路口均視為一節點,計算進入與離開路口之流量,故可將
交叉路口轉向直進問題視為一起迄問題,並假設每一時段之起迄流量所使用之路
段比例固定且資料均屬於同一多項式分配(Nancy, 1989)。
2.4 起迄矩陣推估之性質探討
本小節將分三個部份討論目前研究的成果,分別為
1. 起迄矩陣解的存在
2. 起迄估計的準確度
3. 先期資訊的使用
概述如下。
2.4.1 起迄矩陣與路段流量
實務上,透過路段流量推估起迄矩陣所面臨的問題,通常因限制式少於變數
而有無限多組可行解。因此,推估起迄矩陣的問題多歸納為兩個步驟:
1.
決定可行解空間
2.
由可行解空間當中挑選一組合適的矩陣
然而,在某些時候路段流量限制式卻可能造成起迄矩陣無解的狀況。
2.4.1.1 路段流量會產生起迄矩陣無限多組解
在路段流量可以產生出無限多組解的狀況下,在起迄矩陣估計上最常被用到
的方式是最大概似法。目前有很多研究均以最大概似法進行估計,其先驅為 Van
Zuylen 與 Willumsen,提出兩種的模式,一種以旅次量作為量測的單位,另一種則
是以路段流量為量測單位(Van Zuylen and Willumsen, 1980)
。最大概似法的函數概
念是透過數學式描述何種結果是最有可能的,但要透過這種方式來描述真實駕駛
者的行為是相當困難的。因此,研究者往往會加入其他的資訊來改善起迄估計的
結果。這些資訊包含有旅次長度(Chan, 1986)、車牌調查資料(Geva, 1983)、周
界線流量(Landau, 1982)以及先期矩陣(Van Zuylen and Willumsen, 1980)等。雖
然引入資料的做法可以提高起迄矩陣估計的準確性,但在實務上這些資料的可取
得性與正確性仍有待討論。
值
在實務問題上,由於交通流量測量設備的誤差以及起迄對的旅行時間差,所
觀察到的交通流量通常不俱有一致性。因此,要以觀察到的路段或交通流量推估
起迄矩陣經常會無法求得一可行解,故需至少有一可行解的方法論。假設至少有
一可行解或對於路段流量觀察值進行前置處理,使其能產生可行解(Van Zuylen and
Branston, 1982)
。亦有其他研究透過一般化最小平方法(Generalized Least Square)
( Bell, 1991; Cascetta, 1984; Hendrickson et al., 1984 )、 無 限 制 式 最 佳 化
(Unconstrained Optimization)
(Mekky, 1979)
、線性對數(log-linear)模式(Bell, 1984)
等。
然而,最小平方法或無限制式最佳化問題有時無法保證所有的起迄流量均為
正值,因此 Hendrickson 等人採用捨去法以將負值轉為正值,但這種轉換的方式對
於目標值的影響程度未知,且雖然透過此種方式可以得到一組可行解,但此答案
不再可以被確認為最佳解,而且不知道它與最佳解的差異有多大(Hendrickson et al.,
1984)
。
另外一種解決路段流量不一致的方式是將路段流量視為隨機變數,通常假設
路段流量為符合普瓦松分配(Maher, 1983; Davis and Nihan, 1991)。Jornsten 和
Wallace 提出了透過隨機模式(stochastic programming)的概念,輸入資料的不一
致是正常且可以被描述的,並假設這些交通流量服從一個未知的分配 (Jornsten
and Wallace, 1993)
。假設流量的變異程度與流量的值成正比,因此假設路段流量為
普瓦松分配,但在實際路網上,變異程度不一定符合此狀況,尤其是在高車流的
狀況下,流量的變異往往受到塞車的影響而有很大的落差。
2.4.2 起訖估計的準確度
所有起迄估計模式的模式均會面臨到結果正確性的議題,因為理論上並不存
在真實的起迄結果。Bell 透過路段流量觀察值的變異數以決定所推估而得的起迄矩
陣信賴區間,但此方法必須假定旅次屬於某個起迄對的機率為已知 (Bell, 1983)。
於 1985 年時,Bell 透過起迄矩陣符合對數正態(log-normal)分配的假設,並結合
先期矩陣的平均值與變異數以估計本期起迄估計的信賴區間 (Bell, 1985)。Yang
等人提出了一個最大相對誤差的觀念,以量測所選擇的起迄矩陣與其他所有可行
解空間中起迄矩陣的距離。這個方法假定所有的路段流量以及路徑選擇比例均為
已知且正確,因此所有的誤差來源均是與可行解範圍中的其他解的差異 (Yang
et,al, 1991)
。
2.4.3 先期起迄資訊(priori information)的使用
許多研究均需要先期起迄資訊作為由可行解空間中尋找最接近解的基礎。在
這種狀況中,先期起迄資訊所扮演的角色相當的重要,並直接決定了推估結果的
好壞 (Lam and Lo, 1991),因此,如何挑選或產生一個先期起迄資訊是相當重要
的研究議題。Bell 提出了一個推估先期矩陣並估計其變異數的方法,但僅能用於路
口的轉向比估計 (Bell, 1987)。Spiess 透過將先期起迄矩陣當中的元素視為服從
普瓦松分配的隨機變數,透過假設路段流量具有一致性且正確,即可結合最大概
似法來決定起迄矩陣中的任一元素的平均值 (Spiess, 1987)。許多的學者均認為
先期起迄矩陣在模式當中的重要性應該要比真實路網流量觀察值來得低 (Maher,
1983; Bell, 1984; Jornsten and Wallace, 1993)
。
2.4.4 小結
由文獻的回顧可以發現,針對靜態起迄矩陣的估計有許多不同的方法,但並
沒有辦法評論出某一種方法顯著的較其他的方法好。然而,許多的研究均使用了
最大概似的觀念,並結合先期起迄矩陣進行估計。然而,先期矩陣資訊往往巨大
地影響最終推估結果,在沒有一個正確的先期矩陣狀況下,將會導致推估結果的
失真。在先期起迄矩陣資訊無法取得的狀況下,本研究將採用不需先期起迄矩陣
資訊的方式進行起迄估計。
第三章、模式建構
本研究預計使用引力模式,建構模式後將模式帶入最大概似法進行求解。本
章將針對
3.1 引力模式
社會科學中所使用之引力模式乃源自於牛頓之萬有引力定律,由於研究發現
可用引力模式來敘述人類遷移的行為,並牛頓之萬有引力公式進行改寫,以符合
不同之研究需求,舉例來說,Reilly(1931)推導出可應用於零售業的引力模式,
該模式可描述零售店家與消費者之間之行為;此外類似之引力模式應用之敘述已
於文獻回顧介紹過,故不再此多做贅述。而本研究所研究之方向為旅次分布之推
估,故著重於使用在旅次分布推估上的引力模式,將於本章節中進行詳細的討論。
3.1.1 古典引力模式
Young(1924)透過研究觀察,將牛頓的萬有引力公式進行改寫,用來表現人
類遷移的行為,如下所示:
2/ D
kF
M
(26)
k 為常數,M 為人口移動量,F 為單一區域對其他群體的吸引力,D 為兩者間之距
離。
Stewart(1941)將引力模式加以分析,提出人口的引力模式(demographic
gravitation)
,假定人口中心
i
與 j 之間的交互作用
T
ij,會受彼此的人口質量
P 與
iP
j,
和兩者距離
d
ij之平方反比影響,加入人口引力模式常數 G,則可得到下式:
2)
(
i j ij ijGP
P
d
T
(27)
Stewart(1948,1950)與 Dodd(1950)將權重的觀念帶入人口引力模式,試
將人口力(demographic force)以人口能量(demographic energy)取代,改寫人口
引力模式為:
2)
)(
)(
(
i i j j ij ijG
w
P
w
P
d
T
(28)
而後經過許多研究改進,不僅帶入人口權重
w 與
iw
j,還加入指數的可估計之
統計參數
、
與
,分別用於
i
與 j 人口質量與兩地距離,故傳統的引力模式可
改寫如下:
(
i i)(
j j)(
ij)
ijG
w
P
w
P
d
T
(29)
於是可得引力模式通式:
)
(
)
(
)
(
ij ijA
i
B
j
F
d
T
(30)
)
(
A
與
B
(
)
分別表示起迄點之權重函數(weight function),而
F
(
)
表示距離阻抗函
數(distance deterrence function)。一般來說
F
(
)
可分為冪次阻抗函數(power
deterrence function)與指數函數阻抗函數(exponential deterrence function)
,後段章
節會針對阻抗函數進行詳細說明。
3.1.2 廣義引力模式
Ashish Sen 與 Tony E. Smith(1995)對數個行為者(actor)與機會(opportunity)
的交互作用(interaction)下之行為,進行引力模式之相關假定。假定交互作用會
受個別行為者與機會之間不同的行為影響,如此便會產生所謂的空間分隔(spatial
separation)
,且彼此相異。因此進一步說明可以假定空間分隔之間的交互作用,給
定一個行為者集合
A
,與一個機會集合
B
,受到存在於 A 與 B 之間的空間
分隔屬性(separation attributes)
,
k
,
k
K
影響。每一個不同的空間分隔屬性,k,
可代表不同之交互行為,可用數值函數
kc 表示,對於每一對行為者-機會組合,
存在
c
k(
,
)
代表
和
之間 k 型態(k-type)的分隔程度,其值越高代表分隔越
大。因此空間分隔可用一系列的分隔尺度(separation measure)
c
k:
k
K
表示,
則
和
存在空間分隔特性(separation profile),
c
(
,
)
c
k(
,
)
:
k
K
,表示
不同交互行為之下的成本特性(cost profile)。
與其相對應之空間分隔特性
c
c
(
i,
j)
:
i
I
,
j
J
。原則上觀察行為者與機會間
的獨立交互作用行為,在 c 組態的狀況下,
in:
i
I
,
jn:
j
J
,
n
1
,...,
N
,
由一個對任一
i與任一
j之間的觀察交互作用(observed interaction)
,
N
(
i,
j)
,
得到對應的相關交互作用頻率(relative interaction frequency)
,
N
(
i,
j)
/
N
,並可
估計機率
p
c(
i,
j)
。
在上述架構下,提出三項模式必要條件:
R1.恆正性(positivity)
對所有空間分隔組態(separation configuration)
,
c
C
,與所有空間交互
作用樣式(spatial interaction pattern),
s
S
,其樣式機率,
P
c(s
)
,恆正。
R2.對稱性(symmetry)
對所有給定的空間分隔組態,與一對交互作用樣式, s ,
s
'
S
,若 s 與 '
s
之間的差異僅限於彼此的分類排序上,則
P
c(
s
)
P
c(
s
'
)
。
R3.連續性(continuity)
對任意給定之交互作用樣式,
s
S
,空間分隔組態,
c
C
,與一數量
0
,
存在
0
,在
c
'
C
,且
c
c
'
狀況下,滿足
P
c(
s
)
P
c'(
s
)
。
Ashish Sen 與 Tony E. Smith(1995)將三項條件列入定義中,可對空間交互作
用過程(spatial interaction process)進行定義:
定義 3.1
空間交互作用過程 S 被視為空間交互作用過程,在一組機率函數,
P
cc
C
:
3.1.3 引力模式之阻抗函數定義
前述引力模式之阻抗函數,其意義在於表現行為者前往空間分隔的意向,組
成引力模式之核心部分。Openshaw 與 Connolly(1977)將所有可能的阻抗函數列
舉出。
阻抗函數的形式有很多種,在本小節中僅介紹其中的幾種阻抗函數。Ashish
Sen 與 Tony E. Smith(1995)說明如下:
1. 冪次阻抗函數(power deterrence function)


![圖 4. 1 高速鐵路路網結構示意圖 [資料來源:本研究整理] 根據台灣高速鐵路公司統計,2011 年 5 月每周平均旅客人次約有 744,595 人。 以 5 月 10 日至 5 月 16 日的總旅客起迄流量矩陣為例,起迄矩陣如下表 4.1 所示: 表 4](https://thumb-ap.123doks.com/thumbv2/9libinfo/8399843.179165/63.892.171.808.235.1081/月每周平均旅客人次約有日至月總旅客起迄流量矩陣為例起迄矩.webp)
![表 4. 5 高速鐵路 2011 年 5 月 10-16 日北上各站起點流量 起點 旅客人次 台北 0 板橋 2,299 桃園 17,409 新竹 44,408 台中 100,688 嘉義 29,206 台南 47,423 左營 121,160 總旅次量 362,593 [資料來源:本研究整理] 表 4](https://thumb-ap.123doks.com/thumbv2/9libinfo/8399843.179165/66.892.276.808.117.1173/日北上各站起點流起點旅客人次台北板橋桃園新竹台中左營總旅次量.webp)
![表 4. 8 高速鐵路 2011 年 5 月 10-16 日南下各站起點流量 起點 旅客人次 台北 209,016 板橋 46,100 桃園 43,404 新竹 21,925 台中 32,853 嘉義 5,972 台南 4,103 左營 0 總旅次量 363,373 [資料來源:本研究整理] 表 4](https://thumb-ap.123doks.com/thumbv2/9libinfo/8399843.179165/68.892.270.812.123.1096/下各站起點流起點旅客人次台北板橋桃園新竹嘉義台南左營總旅次量.webp)
![表 4. 13 高速鐵路北上分層分區推估起迄流量表 北 中 南 起點旅次 北 19,708 0 0 19,708 中 139,064 6,032 0 145,096 南 139,247 48,247 10,295 197,789 迄點旅次 298,019 54,279 10,295 [資料來源:本研究整理] 以此跨區起迄矩陣,對各站起點與迄點流量進行比例性還原,區分出各站至 各區之起點流量以及迄點流量,如下表 4.14、表 4.15 所示:](https://thumb-ap.123doks.com/thumbv2/9libinfo/8399843.179165/71.892.285.702.115.358/北旅次站起點與迄點流量進行比例原區分出站至各區點流所示.webp)
![表 4. 15 高速鐵路各站至各區之推估迄點流量表 迄點流量 北 中 南 台北 16140.78 96817.81 96945.04 板橋 3567.216 21397.35 21425.47 桃園 0 20848.83 20876.23 新竹 0 6032.007 15957.99 台中 0 0 32283 嘉義 0 0 6024 台南 0 0 4271 左營 0 0 0 [資料來源:本研究整理] 以此還原之分區各站起點與迄點流](https://thumb-ap.123doks.com/thumbv2/9libinfo/8399843.179165/72.892.172.804.144.821/台北板橋桃園台中嘉義台南左營資料來源本研究整以此還原之分區各.webp)