2006 IEEEInternational Conferenceon Systems, Man,andCybernetics
October8-11, 2006, Taipei, Taiwan
The
Effects of
Using Roadside Wireless Repeaters on Extending Path
Lifetime in Vehicle-Formed
Mobile
Ad
Hoc Networks on
Highways
Shie-Yuan
Wangand
Chih-Liang Chou
Abstract-Intelligent Transportation Systems (ITS) is an
important research topic. One goal of ITS is to exchange
information among vehicles in a timely and efficient manner.
In the ITS researchcommunity, inter-vehicle communications
(IVC) is considered a way that couldachieve this goal without
infrastructure support.
Aninformationnetwork built on top ofvehiclesusing IVCis
atypeofmobile ad hoc networks(MANET).Inthe past, many
unicast routing protocols for MANET have been proposed.
In these protocols, when a routing path breaks, they either
locally or globally repair it. Because the topology of an IVC
network changes very rapidly on the roads, an established
routing path in such a network breaks very frequently. This
phenomenon hurts theperformanceof applications runningon
anIVC network. In this paper,weinvestigatetheeffect ofusing
roadside wireless repeaters on extending routing pathlifetime
in IVC networks onhighways.
I. INTRODUCTION
Intelligent Transportation Systems (ITS) is an important research topic. ITS aims to provide drivers with safer,more
efficient, andmorecomfortabletrips. Forexample,ITS aims to provide drivers with timely traffic congestion and road condition information sothat drivers can avoidcongested or
dangerousareas.Inaddition,ITS aims toprovide drivers with networking services so that they can exchange information, send/receiveemails, browse webpages fromthe Intemet,etc. Toachieve these goals, timely and efficiently distributing and acquiring information amongvehicles is necessary.
In the ITS research community, inter-vehicle communica-tions (IVC) has attracted the interests of many automobile manufactures and researchers. In such a scheme, no infra-structure is required for communications between vehicles, and each vehicle is equippedwith awireless radioby which it sends, receives, and forwards messages for othervehicles. The vehiclesontheroads dynamically formamobile ad hoc network (MANET) at any time. Information is distributed, acquired, and exchanged on top of this network. In the following ofthispaper, forbrevity, we will simply call such a vehicle-formed MANET an IVC network.
Although many studies about MANET have been done in the past, their results may not be applicable to an IVC network. In an IVC network, vehicles can move at a high speed such as 110 Km/hr. In past studies, however, mobile nodesaregenerallyassumed to move at a much lowerspeed. In addition, vehicles generally move on paved roads with acceleration/deceleration, lane-changing, and car-following
S.Y. Wang is with Faculty ofComputer Science, National Chiao Tung University, Hsinchu,Taiwan shieyuan@csie. nctu .edu. tw
C.L. Chou is withDepartmentofComputer Science,National ChiaoTung University,Hsinchu, Taiwan [email protected] .ecdu.tw
behaviors. However, mobilenodes in past studiesare gener-ally assumed to move freelyinarandom-waypoints fashion, which hasbeen foundtoleadtounreliable results[1]. Due to these differences, the results of past studies about MANET may not be applicable to IVC networks.
InITS,timely and efficient information distribution, acqui-sition, andexchange amongvehicles is important. However, due to several reasons, it is not easy to achieve these goals. First, an IVC networkcaneasily getpartitioned. This situation caneasily happen when traffic density is low (e.g., at midnight), when the wireless transmission range is short, when few vehicles are equipped with wireless radios, etc. Second, aroutingpath established betweenapair ofvehicles in anIVC networkcan easily break. Apathcan break easily when its source and destination vehicles move in opposite directions. Evenifthepath's sourceanddestination vehicles move in the same direction, it can still break easily due to constantlane-changing activities occurring on the roads.
Because networktopology variesfrequentlyin anIVC net-work,anestablished routing path betweentwovehicles needs tobe repaired frequentlyto maintainthepath's connectivity. A routing protocol designed for IVC networks therefore should haveagood path-repair design. Suchadesign should quickly findabackup path andincurminimum controlpacket bandwidth overhead. Otherwise, applications running on an IVC network will performbadly and the goodput ofan IVC network will below.
Designing a good routing protocol may help to find a backup path morequickly. However, ifphysically there is no backup pathbetweenapair ofvehicles,eventhe bestrouting protocolcannotmaintainthepath connectivity between them. Thelifetime ofthepath between apair of vehiclesismainly determinedby the network topology rather than by the used routing protocol.
To extend the lifetime of paths in an IVC network on highways, increasing the number of wireless links in the IVCnetwork is effective. This is because whenmorewireless links betweenvehiclesexist in anIVCnetwork, it is easier to find abackup path betweenapairof vehicles toextend their path lifetime. One way to increase the number ofwireless linksin anIVC network istodeploy wirelessrepeatersalong the highway. The function of a wireless repeater is very simple. It functions like a layer-I Ethemet hub. When it receives a wireless packet, it immediately rebroadcasts the packet. Iftwo vehicles are outside the wireless transmission range of each other but are within the wireless transmission range of the wireless repeater,theycansuccessfullyexchange their packets via the wirelessrepeater.
With wireless repeaters deployed along the highway, one can expect longer path lifetime on highways. However, the cost of deployment and maintenance of these repeaters is the main factordetermining the economic feasibility of this solution. Deploying a huge number of repeaters can make the network fully connectedonhighways.However, the cost of such asolution maybetoohightobe acceptable. Thecost ofthis solution needs to bejustifiedbased on theadvantages brought bythis solution.Toreduce thecost, onepossibleway is to increasethedistancebetweentwoneighboringrepeaters along the highway, which reduces the required number of repeaters. However, as such a distance increases, the path lifetime improvement may decrease.
The contribution ofthis paper is aninvestigation of path-lifetime improvement when roadside wireless repeaters are deployed in an IVC network on highways. We varied the distancebetween twoneighboring wirelessrepeaters tostudy its effects on path lifetime improvement. This investigation isbased on morerealisticvehicle mobilitytracesandhasnot been studiedinthe past.
The rest ofthis paper is organized as follows. Section II surveysrelatedwork.SectionIIIdescribes the simulation en-vironment and settings. SectionIV explains theperformance metrics used in this study and presents the results. Finally, we conclude the paper in Section V.
II. RELATED WORK
Intheliterature, severalpapershavediscussed and studied the applications of MANET to IVC networks. Due to the paperlengthlimit, we can only briefly describe them here.
In [2], the authors presented the framework and compo-nents of their "Fleetnet" project, which aims to efficiently exchange information among vehicles. In [3], the authors proposed a GPS-based message broadcasting method for inter-vehicle communication. In [4], the authors proposed a GPS-based unicast routing scheme for carsusing a scalable location service.
In
[5],
the authorsshowed thatmessages canbe delivered moresuccessfully,providedthatmessagescanbestored tem-porarily at moving vehicles while waiting for opportunities tobe forwarded further. In [6], [7], the authors studied how effectively a vehicle accident notification message can be distributed to vehicles inside a relevant zone. In [8], the authors focused on how to establish a direct transmission link between two neighboring vehicles. In [9] , the authors studied the lifetime ofroutes in ad hoc networks assuming that node mobilitycanbedescribedby asimplemathematic model.In [10],theauthors proposedsomechangestoAODV rout-ingprotocol forIVCnetworks. In [ I1], theauthorsproposed a position-based routing protocol for IVC networks in city environments. In [12], the author studied the effectiveness ofdistributing information on an IVC network. In [13], the authorstudied the effects of wireless transmission range on
pathlifetime inanIVC network.Recently,the authors in
[14]
proposed apractical routingprotocol forvehicles movingon
the roads.
Most of these studies proposed new routing protocols for providing timely and efficient information distribution, acquisition, and exchange on IVC networks. In contrast, the focus of this paper is not to propose a new routing protocol for IVC networks. Instead, in this paper we discuss theeffects ofusing roadside wireless repeaters on extending routing path lifetime in IVC networks on highways.
Recently, in [15], the authors studied the strategy used to deploy wireless access points for outdoor wireless local area networks. Although they also studied the effects of AP distance on the performance of an outdoor wireless local area network, there are someimportantdifferences between the two papers. First, the approach taken in their paper (analytical) is different fromthat taken in this paper (trace-based simulation). Second, the performance metrics studied intheir paper (link utilization) are also different from those studied in this paper (pathlifetime).
III. SIMULATION ENVIRONMENT AND SETTINGS A.
Traffic
SimulatorThemicroscopic traffic simulator that we used to generate mobility traces ofvehicles is VISSIM 3.60 [16], which is a commercial software developed by PTV PlanungTransport VerkehrAG company,locatedin Germany. VISSIM uses the psycho-physical driver behavior modelsdeveloped by Wiede-mann [17], [18] to model vehiclesmoving on the highways. This includes acceleration/deceleration, car-following, lane-changing, and other driver behaviors. Stochastic distributions of speed and spacing thresholds can be set for individual driver behavior. According to the user manual, the models have beencalibrated through multiple fieldmeasurements at the TechnicalUniversity ofKarlsruhe, Germany.In addition, field measurements are periodically performed to make sure thatupdates of model parameters reflectrecentdriver behav-ior and vehicle improvements.
B. Highway System
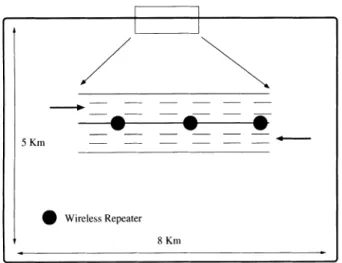
Thetopology ofthe highway usedinthisstudy is depicted in Fig. 1. It is a rectangular closed system with 4 circular comersandhas3 lanesineach direction.Itslength and width are8 Km and5Km,respectively.There are no entrances and exits on this highway system.
Although the chosen highway topology may not be very realisticcompared withhighwaysinthe realworld,wethink that their difference is not important from the viewpoint of DSRC (Dedicated ShortRange Communication) wireless transmission. It is true that a real-world highway may not look like a rectangle and instead may have several curves. However, for the safety ofhigh-speed driving, the radii of these curves usually are very large (say, a few kilometers). This property makes these curves effectively equivalent to straight lines when the 100-meter DSRC wireless transmis-sion range is used.
Vehicles areinjectedintothissystem in both directions at the top-left comer. The injection rate is 1,000 vehicles per hour in each direction. After all vehicles have entered the system, they move freely in the highway system according
Fig. 1. The topologyof thehighway used inthisstudy
totheirrespective desiredspeeds,vehiclecharacteristics, and driving behavior.
Since vehicles are assigned different desired speeds and different thresholds for changing lanes for achieving their desired speeds, a vehicle may thus (1) move at its desired speed when there isno slower vehicleahead ofit, (2) follow the lead vehiclepatiently, which mayhappen when the lead vehicle is slower but the difference between the leadvehicle's speed and its own desired speed is still tolerable, or (3) decide to change lanesto pass the lead vehicle if the speed difference is intolerable.
Thevehiclemobilitytraces aretakenafter all vehicles have entered the highway system and have been moving for at leastonehour. Tentracesaretakenand eachonelasts for 300 seconds. In this paper, the reported performance results are averaged results from these traces. We have also computed the standard deviation of a performance metric from these traces. These standard deviationsusuallyarelessthan 5% of their corresponding averages. To make performance curves easy to read rather than being cluttered up with standard deviation points, in the presented performance plots, only average points are plottedand standard deviation points are omitted.
Note that in this highway system, vehicles in different directions do not interact with each other. This is because in this topology a vehicle cannot leave the highway in one direction and then enter the highway in the opposite direction.
C. Vehicle
Traffic
In this study, the total numberofvehicles moving in the highway system is set to be 2,000 and a half of them are moving in each direction. The average distance between a vehicle andthe vehicleimmediately followingit on the same lane canbecalculated. Itis(26Km/lane * 3lanes/direction)/ (1,000 vehicles/direction) = 78 meters. This car-following distance is typicalofahighway in which many vehicles use the highway but they move smoothly without congestion.
The desired speeds chosen for these vehicles determine
the absolute speeds ofthese vehicles and the relative speeds amongthem. Thedistribution ofthese desiredspeedsis set to be[20%: 100- 110 Km/hr, 40%: 90- 100 Kmlhr, 20%: 80-90 Km/hr, 20%: 70- 80 Kmlhr], which means that20% of the vehicles are moving at their desired speeds uniformly distributed between 100 Km/hr and 110 Kmlhr, 40% of the vehicles are moving at their desired speeds between 90 Km/hr and 100 Km/hr, etc. We think that this distribution is typical of a highway in which various types ofvehicles exist.
D. WirelessRadio
The transmission range of the wireless radios used in vehicles and wirelessrepeatersischosentobe 100meters.It is areasonable settingforthe DSRC (Dedicated Short Range Communication) standards proposed for ITS applications.
Since this paper focuses only on the connectivity among vehicles rather than the achievable data transfer throughput among them, this paper does not consider the bandwidth of wireless radios and the medium access control protocol used by them. Instead, we took a simplified approach to determine whether or not two nodes (each one can be either a vehicle or a wireless repeater) can successfully exchange theirmessages. In ourstudy, as long astwo nodes are within each other's wireless transmission range, their message exchanges will succeed. Otherwise, their message exchanges will fail. This scheme is similar to that used in the ns-2 simulator[21],exceptthat 250metersis usedasthe transmission range of IEEE 802.11 wirelessLAN in ns-2. E. Roadside Wireless Repeaters
Alongthe highway, wireless repeaters aredeployedatthe centerofthesix lanes(seeFig. 1). The distancebetween two neighboring wireless repeaters is set to a value larger than 100meterssothat there isnodirect link between them.Ifthe distanceis set to avalue smaller thanorequalto 100meters, the IVC network will become afully-connected network. In such a case, there will always be a path between any pair of vehicles (This is because now these wireless repeaters form the backbone ofthe IVC network) and the lifetime of apath will lastforeveruntil the simulatedperiod is finished. Because the above results are intuitive and uninteresting, we do not study the cases in which the distance between neighboring repeaters is less than 100 meters. Instead, we investigate only those cases in whichthe distance is greater than 100 meters.
E Routing Protocol
Mostexistingrouting protocolsdesignedfor MANETsuch as [19] and
[20]
implement their own path-repair designs. Generally, a path-repair design canbe classified as either a local or aglobalrepairdesign.In alocal repairdesign, when apath breaks,the routing protocol tries to set up a newpath fromthe breaking point to the destination vehicle and reuse the path fromthe source vehicle to the breaking point. In a global repair design, a routing protocol instead tries to setup anewpathfrom the source vehicle tothe destination vehicle.Whenapath breaks, alocal repair design canfindanother pathto reconnectthesourcevehicletothedestination vehicle more quickly than a global repair design can do. This is because in alocal repair design thebreakingpoint neednot send a path-broken error message to the source vehicle to initiate a global path search. Instead, it just needs to find a local path to connect the breaking point to the destination vehicle. One problem with this design is that such a local pathmay not existhoweveranewpathfromthe source to the destination vehicles may indeed exist. As such, the lifetime ofa path under a local design is theoretically shorter than that under a global repair design. For this reason. in this paper we assumethat theroutingprotocol uses aglobal path repair design.
IV. PERFORMANCE METRICS ANDRESULTS
The following metrics are chosen to observe the perfor-mance improvement when roadside wireless repeaters are used. Foreachmetric, weanalyze and show itsperformance under eight different wireless repeater distances. The eight distances are 110, 120, 150, 200, 300, 400, 500meters, and oc,respectively. In the last setting, nowirelessrepeaters are deployed on the highway.
A. Call Blocking Probability
The firstmetric isthe callblocking probability during the period of a trace (which is 300 seconds in our study). In each second, each vehicle triestobuildaunicast connection to every other vehicle. If there is a routing path from the sourcetothe destinationvehicles,the connection callwillbe successfully established. Otherwise, the connection call will beblocked. Ideally, ifthe IVC networkisfullyconnectedat alltime, the maximum number ofsuccessful calls during the traceperiodis(300seconds) *(2,000vehicles * 1,999other vehicles) / (2 symmetric factor) = 599,700,000 calls. If we define T' as the total number of successful calls established duringatrace,thecallblockingprobabilitycanbecalculated by 1
-(T/599700000).
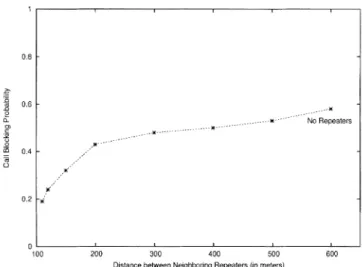
Fig. 2 shows the call blocking probability for the eight cases. Each point on the curve is the average call blocking probability calculated from the results often traffic traces.
Thepoint onthe rightrepresentsthe case withnorepeaters. Comparing thecases withrepeatersto thiscase, we seethat deploying roadside wireless repeaters reduces call blocking probability as expected. On the other hand, one observes that when the repeater distance is only 10 meters, which is close to the wireless transmission range, the call blocking probability is still about 20%. Compared to the 0% call blocking probability when the repeater distance is less than 100meters, this showsthat settingtherepeaterdistanceto a
valuelarger thanthe wireless transmission range maycause anon-negligible call blocking probability.
B. Path Lifetime
The second performance metric is the average lifetime ofpaths with different length in hop count. We define the lifetime of a repairable unicast path between two vehicles as
0.8 0.6F 0.4k -02 co CZ C) 0.2 v 100 200 300 400 500 600
Distance between Neighboring Repeaters (in meters)
Fig. 2. The call blocking probability under different distancesbetween
neighboringrepeaters
the duration in which there exists one path between them.
That is, during this period these two vehicles can find a
pathtoexchange their messages, eventhough this pathmay
need to be changed during this period. (For brevity, in the following of this paperwe will simplyuse"unicast path" or
"4path" to represent"repairable unicast path.")
In our study, whenever there is a need to find a path
between the sourceand the destination vehicles, we choose
the shortest path between them. We set the unit of path lifetimeto beone second. Starting from the first second ofa
traffic trace, for every pair of vehicles, we check whethera
unicast path can startin eachsecond. We say that aunicast
path betweentwovehiclesstartsinNth second if there exists
a path between them in Nth second. Once a path is found
(set up) between two vehicles, in each subsequent second
we check whether it would break in this second. A unicast
path is considered broken ifany wireless link (i.e., hop) on
its path no longer exists. If the path does not break in this
second, we repeat this connectivity test inthe next second. Suppose thatapath is foundtobe brokenin Mlth second. Because the global repair design is used, we try to find
the shortestbackup path between the sourceand destination
vehicles. Ifno suchbackup path can be found, the lifetime
of this repairable unicast path is now determined and it is
(M + 1) -N. On the other hand, if suchapathcanbefound,
the old path is replaced with this new path. After the new
source-to-destination path is formed, its connectivity will be tested in each subsequent second as before.
We classify all paths into different hop-count classes by their initial path hop count. This means that no matter how
manytimesapath's hopcountchanges duringatraffictrace,
only the initial hopcountofapath is taken into accountfor
ourclassification.In each traffictrace, inorderto obtain the
average path lifetime ofa hop-count class, we average the
lifetime of the paths belonging tothat class.
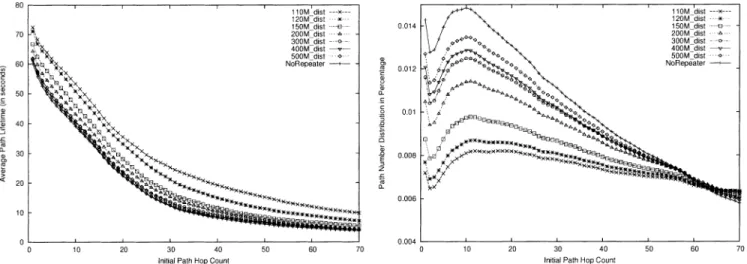
Fig. 3 shows the relationship between average path
life-time and path length in hop count under different repeater
distances. The results give us some insights. First, the .--)K ~ No Repeaters
I
80
08 40 X ,_
20 1n0
0 10 20 30 40 50 60
Initia Path Hop Count
Fig.3. The relationship between average path lifetime and their initial hop count under different repeater distance
deployed roadside wireless repeaters indeed extend path lifetime. Comparing the case of 110-meter repeater distance with the case using no repeaters, one sees that average path lifetime can be increased by 10 to 15 seconds when 110 meters is used as the repeater distance. From this figure, one also see that, the longer a path is, the shorter its lifetime is. For example, even in the 110-meter case, one sees that a path's lifetime is only about 20 seconds when its length is 40 hops. This is a bad news for applications which need to use long network connections to exchange data.
C. Path Number Distribution in Percentage
The third performance metric is the path number distri-bution in percentage for each case with different repeater distances. Like before, in each traffic trace, when a path is first established, it is classified into a hop-count class by its initial hop count, and the path counter of that class is increased by one. Aftera trace is processed, eachhop-count class's path proportion is then calculated.
Fig. 4 shows the relationship between path number dis-tribution in percentage and path length in hop count for the eight cases. The results show that when more roadside repeaters are deployed in the IVC network, the proportion of longer paths increases in thedistributioncurve. This phe-nomenon shows the effect of roadside repeaters onextending the path length. In addition, one sees that in each case the paths withinitial length of about 10 hops constitute the most part of the distribution. This information can be provided to the routing protocol to best utilize the IVC network. D. Path Repair Count
The fourthperformance metric is the relationship between path repair count and initial path hop count under different repeater distances. Like before, in a traffictrace, when a path is first established, it is classified into a hop-count class by its initial hop count. Later on, when it is repaired due to a path break, its path repair count is increased by one. As such, we have the path repair count information of every path in
70
Initial Path HopCount
Fig.4. Thepathnumber distributioninpercentageunderdifferentrepeater distances
the trace. To obtain the average path repair countof a hop-count class, we average the path repaircounts of the paths belonging to that class.
This performance metric shows how frequently arouting protocol needstouseitspath-repair designtoextendapath's lifetime. Clearly, we prefer tosee a small path repaircount, otherwise, constantly triggering the path-repair design will incur much control packet bandwidth overhead and hurt the performance ofapplications.
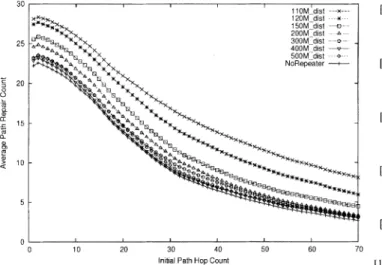
Fig. 5 shows the relationship between averagepath repair countand path length inhop count under different repeater distances. From this figure one has the following findings. First, longer paths have smaller path repair counts. This is not because longer paths are more
stable,
but because they haveshorterpath lifetime. Inotherwords,beforethe lifetime of a path ends, a longer path will experience fewer path repairs than a shorter path does. Second, one sees that, for each hop-count class, when the repeater distance becomes smaller in the IVC network, a path suffers from more path repairs. From Fig. 2, one sees that roadside repeaters help find paths betweenapair of nodes. When thepath is longer, the chance that there is atleast onerepeaterthat relays two vehicles and resides on the path becomes higher. However, because the location ofthe roadside repeater is fixed while thetwo vehiclesmove at high speeds,thetwolinks between the repeater and each of the two vehicles will soon break. This explains why the path repair count increases when the repeater distance decreases. On the other hand, when the repeater distance is large, most found links are directly between two vehicles moving in the same direction. Such links can last longer before they break.V. CONCLUSIONS
In this paper, we investigate the effects of using road-side wireless repeaters on extending routing path lifetime in IVC networks on highways. By using a microscopic traffic simulator, we generated several mobility traces of vehicles moving on the simulated highway. Based on these
30
25 x.AU
20
10
Cc 10 2 30 40XY
InitialPathHop Count
Fig. 5. The relationship between average number of pa hop count under different repeater distances
traces and other settings, we analyze howdi. between neighboring repeaters would affect t probability, the path lifetime, the path num and the path repair count in the studied IV( Our results show that, as conjectured, deE wireless repeaters can increase the path lif find more paths in the IVC network. Howe path repair count may increase. Our results roadside wireless repeaters has its own disadvantages. These insights are useful for d protocols and applications for IVC networkq In the future, we plan to use the
NCTh;
simulator and emulator [22] to study how rI cols would perform on IVC networks withri repeaters. NCTUns 3.0 can take VISSIM's trace output as its input and uses real-world ' stack and application to generate high-fid results. These capabilities make it a suitable 1 IVC-related problems.
VI. ACKNOWLEDGMENTS
This research was supported in part byMl promoting Academic Excellence of Univer grant number
91l-E-FA06-4-4.
REFERENCES
[1] Jungkeun Yoon, Mingyan Liu, and Brian Noble, Considered Harmful," IEEE INFOCOM 2003, M
[2] Walter J. Franz,:Hannes Hartenstein, Brend Boch Road via Inter-Vehicle Communications," Workt 2001: Mobile Communications over Wireless I Applications, Gemeinsame Jahrestagung der G: September 2001, Wien.
[3] Min-TeSun, Wu-Chi Feng,Ten-HwangLai,Kent
Okada, and Kikuo Fujimura, "GPS-Based Messa Inter-Vehicle Communication," 2000 International allel Processing, pp. 279-287.
[4] Robert Morris, John Jannotti, Frans Kaashoek, Ji glas S. J. De Couto, "Camet: A Scalable Ad Ho System," 9thACM SIGOPSEuropean workshop Challenges forthe OperatingSystem, Kolding, [ 2000.
1OMdist---x [5] Zong Da Chen, H.T. Kung, and Dario Vlah, "Ad Hoc Relay Wireless
120Mdist
---x-15M dist &---- NetworksoverMovingVehiclesonHighways,"TheACMSymposium
200Mdist on Mobile Ad Hoc Networking and Computing (MobiHoc 2001)
3C0Mdist
o--400Mdist PosterPaper, October2001.
500M dist
---NoRepeater [6] Linda Briesemeister, Lorenz Schafers, and Gunter Hormmel, "Dis-seminating Messages among Highly Mobile Hosts based on Inter-Vehicle Communication," IEEE Intelligent Vehicle Symposium, pp. 522-527, October 2000.
[7] Linda Briesemeister and Gunter Hormmel, "Role-based Multicast in HighlyMobilebutSparselyConnected Ad Hoc Networks," The First
'X->,*X"
Annual Workshop on Mobile Ad Hoc Networking and Computing(MobiHoc 2000), August 2000.
NWN
3**W-X*_Xx>XXxX,
[8] Tomoyuki Yashiro, Tempei Kondo, Hirotaka Yagome, Masafumi Higuchi,andYuyuka Matsushita, "A Network Based on Inter-Vehicle Communication,"IEEEIntemationalConferenceonIntelligent Vehi-cles,pp.234-250, 1993.[9] Damla Turgut, Sajal K. Das, and MainakChatterjee, "Longevity of Routes in Mobile Ad Hoc Networks," IEEE Vehicular Technology
50 60 70 Conference Spring 2001, pp.2833-2837, May 6-9, 2001. Greece. [10] Timo Kosch, Christian Schwingenschloegl, and Li Ai, "Information .threpairs and initial DisseminationinMultihop Inter-VehicleNetworks-Adaptingthe
Ad-hoc On-demand Distance Vector Routing Protocol (AODV)," IEEE Intemational Conference onIntelligent Transportation Systems, Sin-gapore, Sept3-6, 2002.
[11] Christian Lochert, Hannes Hartenstein, Jing Tian, Holger Fuessler,
fferent distances Dagmar Herrmann, Martin Mauve,"A Routing Strategy forVehicular
the callblocking Ad Hoc Networks inCityEnvironments," IEEEIntelligentVehicles
ber distribution, [12] SymposiumS.Y. Wang, "On the(IV2003),Effectivenesspp. 156-161, Columbus, OH, June 2003.ofDistributing Informationamong
network. Vehicles Using Inter-Vehicle Communication", IEEE ITSC'03
(Inter-)loying roadside national Conference onIntelligentTransportation Systems),October
etime, and help [13]
SY.
12-15, 2003, ShangHai, China.Wang, "Effects of Wireless Transmission Range on Path Lifetime
ver, the average in Vehicle-Formed Mobile Ad Hoc Networks on Highways," IEEE
show that using ICC 2005(Intemational ConferenceonCommunication), May 16-20
advanagesand [1]2005, Korea.
advantages
anY.[141
SYWang,
C.C.
Lin, YW. Hwang, K.C. Tao, and C.L. Chou, "Aesigning routing Practical Routing Protocol for Vehicle-Formed Mobile Ad Hoc Net-s. works ontheRoads,"IEEEITSC 2005 (InternationalConferenceon
Jns 3.0 network Austria.Intelligent Transportation Systems), September 13-16 2005, Vienna,
eal-world proto- [15] Jane-Hwa Huang,Li-Chun Wang and Chung-Ju Chang,"Deployment
oadside wireless strategies ofaccesspoints for outdoor wireless localareanetworks,"
vehicle mobilit IEEE VTC Spring, Stockholm, May, 2005.
vIy [16] VISSIM 3.60 User Manual, PTV Planung Transport Verkehr AG
TCP/IP
protocol
company.Lelity simulation [17] Wiedemann, "Simulation des Strabenverkehrsflusses," Schriftenreihe des Instituts fur Verkehrswesen der Universitat Karlsruhe, Heft 8,
tool for studying 1974.
[18] Wiedemann, "Modeling ofRTI-Elementson Multi-LaneRoads,"In: Advanced Telematics inRoad Transport, editedbythe Comission of the EuropeanCommunity,DGXIII, Brussels, 1991.
[19] Charles Perkins and Elizabeth Royer, "AdHocOn Demand Distance
GOE Program for Vector Routing," Second IEEE Workshop on Mobile Computing ^sities under the SystemsandApplications, February 1999.
[20] David B. Johoson and David A. Maltz, "Dynamic Source Routing inAdHocWirelessNetworks," MobileComputing,editedbyTomasz ImielinskiandHankKorth,Chapter5,pp. 153-181,KluwerAcademic Publishers, 1996.
[21] The Network Simulator - ns-2, available at
"Random Waypoint http://www.isi.edu/nsnam/ns.
[arch 2003. [22] S.Y. Wang, C.L. Chou, C.H. Huang, C.C. Hwang, Z.M. Yang,
ow, "Interneton the C.C. Chiou, and C.C. Lin, "The Design and Implementation of
shop der Informatik the NCTUns 1.0 Network Simulator," Computer Networks, Vol.
AN: Research and 42, Issue 2, June 2003, pp.175-197, (available for download at I und OCG, 26-29 http://NSL.csie.nctu.edu.tw/nctuns.html).
-aroYamada,Hiromi
.geBroadcasting for Conferenceon Par-inyangLi, and
Dou-cWireless Network Beyondthe PC New