國
立
交
通
大
學
電控工程研究所
碩
士
論
文
以三階層升壓電路實現
太陽能供電之獨立直流微電網系統
Implementation of Stand-Alone DC Microgrid System Fed by
Solar Power with Three-Level Boost Converter
研 究 生:林 文 仁
指 導 教 授:陳 鴻 祺 博士
以三階層升壓電路實現
太陽能供電之獨立直流微電網系統
Implementation of Stand-Alone DC Microgrid System Fed by
Solar Power with Three-Level Boost Converter
研 究 生:林文仁 Student:Wen-Jan Lin
指導教授:陳鴻祺 Advisor:Hung-Chi Chen
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Electrical Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical Control Engineering
November 2012
以三階層升壓電路實現
太陽能供電之獨立直流微電網系統
研究生:林文仁
指導教授:陳鴻祺 博士
國立交通大學電控工程研究所
摘要
本文描述以三階層升壓電路實現太陽能供電之獨立直流微電網系統,以回授 單一電流應用於三階層升壓電路實現最大功率點追蹤(MPPT)並解決於三階層升 壓電路中上下電容電壓不平衡問題。在獨立直流微電網系統設計中,使用雙開關 雙向直流電流轉換器,在太陽能穩定維持最大功率輸出下,維持直流微電網電 壓。本文以 FPGA (Field Programmable Gate Array)晶片硬體電路實現演算法及控 制器。Implementation of Stand-Alone DC Microgrid System
Fed by Solar Power with Three-Level Boost Converter
Student:Wen-Jan Lin Advisor:Hung-Chi Chen
Institute of Electrical Control Engineering
National Chiao Tung University
Abstract
In the thesis, the stand-alone DC microgrid system fed by solar power with
three-level boost converter is studied. Only inductor current is sensed to implement
maximum power point tracking (MPPT) and voltage balance control for three-level
boost-type circuit. In order to regulate the voltage of the stand-along DC microgrid
system, a two-switch bidirectional DC/DC converter with battery is included. All the
algorithms and controllers are implemented in Field Programmable Gate Array
致謝
首先我要感謝我的指導教授陳鴻祺博士,感謝他在我研究所兩年的指導與 照顧。於本文創立的時候給予我的教誨,一路上細心的帶領使本論文得以順利完 成。在老師的指導下,不僅在知識上,還是做人的態度上,面對問題解決的能力 上,都給予我非常顯著的幫助。培養我的專業知識,也更深刻的體會自己的不足, 需要多方的學習與調整,在此對老師致上由衷的感謝。 感謝 613 實驗室的各位,在這兩年的研究生涯中,在實驗室認識了許多的朋 友,在朝夕相處切磋琢磨之間,使我在各方面都有進步。感謝子安、崇賢、振宇、 智豪、宏和、威諭以及修哲學長對我的提攜,與你們相處及教導是快樂的。感謝 同學志軒,在課業及研究上我們相互的砥礪。感謝宗辰、韶儒、又瑋、起行、大 開、立明學弟,讓我在研究生活中,充滿樂趣及歡樂,沒有你們,研究的生涯是 單調而苦悶的。最後感謝我的爸爸、媽媽、哥哥、姐姐及朋友們,一直以來在我 成長的路上對我的支持,給予我正確的人生觀念以及精神上的依靠,使我能夠專 心的在學業上努力。感謝在一路上陪伴著我的各位,在各方面對我的支持,使我 成長,謝謝你們。目錄
摘要... i Abstract ... ii 致謝... iii 目錄... iv 圖目錄... vii 表目錄... x 第一章 緒論 ... 1 1.1 研究背景與發展現況 ... 1 1.2 研究目的... 2 1.3 本文架構... 2 第二章 太陽能電池介紹 ... 3 2.1 太陽能電池簡介 ... 3 2.2 太陽能電池發電原理 ... 4 2.3 太陽能電池種類 ... 5 2.4 太陽能電池電路特性 ... 7 2.5 太陽能最大功率追蹤技術 ... 13 2.5.1 擾動觀察法... 13 2.5.2 增量電導法... 15 2.5.3 開路電壓法... 17 2.5.4 短路電流法... 17 2.5.5 實際量測法... 18 2.5.6 直線近似法... 19 2.5.7 模糊控制法... 20 2.5.8 類神經網路法... 20 2.5.9 各最大功率追蹤技術之比較... 21 2.6 太陽能發電系統 ... 222.6.2 市電並聯型太陽能發電系統... 23 第三章 三階層升壓電路控制策略 ... 24 3.1 升壓型直流直流轉換器 ... 24 3.2 三階層升壓電路 ... 27 3.3 電壓平衡控制 ... 32 3.3.1 文獻上控制器架構分析... 32 3.3.2 交錯取樣策略... 35 3.3.3 本文提出電壓平衡控制策略... 37 第四章 太陽能供電之直流微電網系統控制策略 ... 45 4.1 直流微電網系統控制架構 ... 45 4.2 太陽能最大功率追蹤 ... 47 4.3 雙向直流直流轉換器之蓄電池充放電架構及控制 ... 54 4.3.1 雙向直流直流轉換器之降壓操作模式... 56 4.3.2 雙向直流直流轉換器之升壓操作模式... 57 4.4 直流微電網系統控制模擬 ... 58 4.4.1 直流無限匯流排模擬... 60 4.4.2 直流微電網系統控制啟動模擬... 63 4.4.3 直流微電網系統控制穩態模擬... 66 4.4.4 直流微電網系統控制切載模擬... 68 第五章 實作電路與結果 ... 70 5.1 現場可規劃邏輯閘陣列(FPGA)介紹 ... 70 5.2 實作電路... 73 5.2.1 太陽能電源模擬器... 76
5.2.2 閘極驅動電路(Gate driving circuit)... 77
5.2.3 類比數位轉換電路(A/D) ... 78
5.2.4 數位類比轉換電路(D/A) ... 79
5.3 直流無限匯流排實作... 80
5.6 直流微電網系統負載切換實作波形... 88
第六章 結論 ... 90 參考文獻... 91
圖目錄
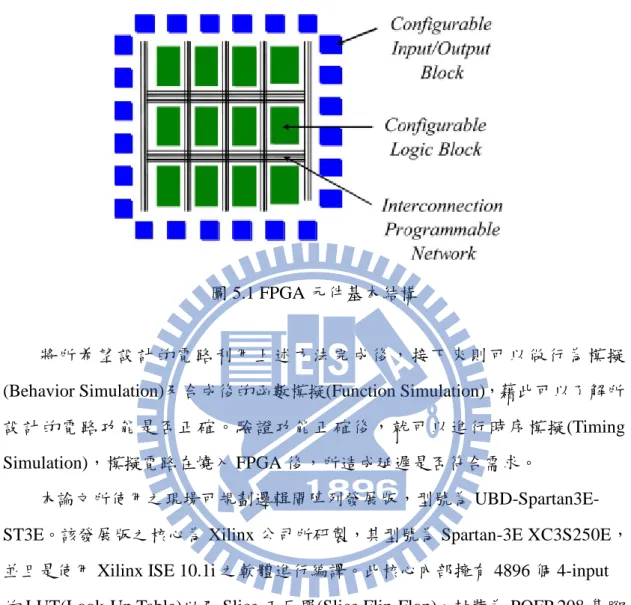
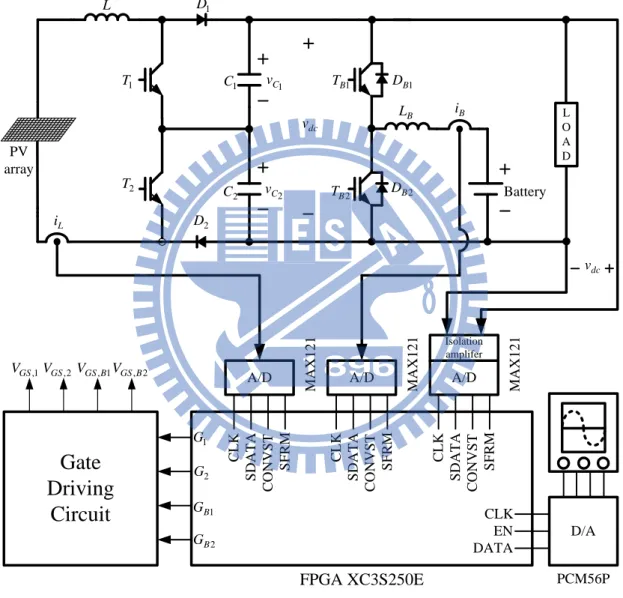
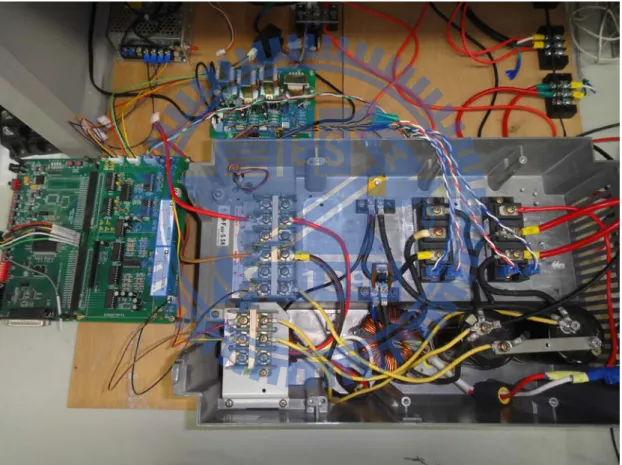
圖 2.1 太陽能電池構造圖... 4 圖 2.2 太陽能電池分類圖... 5 圖 2.3 太陽能電池等效電路... 7 圖 2.4 太陽能電池理想等效電路... 8 圖 2.5 不同日照量強度下之太陽能電池特性曲線(表面溫度25°C) ... 10 (a)I-V 曲線(b)P-V 曲線 ... 10 圖 2.6 不同表面溫度下之太陽能電池特性曲線(日照量強度 2 / 1000W m )... 11 (a)I-V 曲線(b)P-V 曲線 ... 11 圖 2.7 擾動觀察法控制方塊圖... 14 圖 2.8 擾動觀察演算法流程圖... 14 圖 2.9 增量電導法控制方塊圖... 15 圖 2.10 增量電導演算法流程圖... 16 圖 2.11 開路電壓法控制方塊圖 ... 17 圖 2.12 短路電壓法控制方塊圖... 18 圖 2.13 實際量測法控制方塊圖... 19 圖 2.14 直線近似法控制方塊圖... 19 圖 2.15 不同日照量強度下電流-電壓曲線之直線近似線圖 ... 20 圖 2.16 獨立型太陽能發電系統圖... 22 圖 2.17 市電並聯型太陽能發電系統圖... 23 圖 3.1 降壓型直流直流轉換器電路圖... 24 圖 3.2 升壓型直流/直流轉換器等效電路 (a)Ton (b)Toff ... 24 圖 3.3 升壓型直流直流轉換器電感電壓與電流關係圖... 25 圖 3.4 三階層升壓電路圖... 27 圖 3.5 三階層升壓電路開關組態圖... 28 圖 3.6 控制命令和vcont1+vcont2 <1之開關切換及電感電壓與電流關係圖 ... 29 圖 3.7 控制命令和vcont1+vcont2>1之開關切換及電感電壓與電流關係圖 ... 29 圖 3.8 文獻電壓平衡控制架構... 32圖 3.10 未加入文獻電壓平衡控制之波形... 34 圖 3.11 加入文獻電壓平衡控制之波形 ... 34 圖 3.12 交錯取樣策略... 36 (a) vC1 >vC2 ... 36 (b) vC1 <vC2... 36 圖 3.13 本文提出之電壓平衡控制器... 37 圖 3.14 電路開關組態vcont1+vcont2 <1電壓不平衡之電流波形 ... 38 (a) vC1 >vC2 ... 38 (b) vC1 <vC2... 38 圖 3.15 電路開關組態vcont1+vcont2>1電壓不平衡之電流波形 ... 40 (a) vC1 >vC2 ... 40 (b) vC1 <vC2... 40 圖 3.16 模擬三階層升壓電路之本文電壓平衡控制架構... 41 圖 3.17 未加入文獻電壓平衡控制之波形... 43 圖 3.18 加入文獻電壓平衡控制之波形... 44 圖 4.1 直流微電網系統架構... 45 圖 4.2 太陽能電源連接升壓直流直流轉換器... 47 圖 4.3 本文提出之最大功率追蹤控制器... 47 圖 4.4 最大功率追蹤演算法... 48 圖 4.5 模擬三階層升壓電路之本文最大功率追蹤控制架構... 50 圖 4.6 本文之最大功率追蹤啟動模擬波形(100Ω) ... 51 圖 4.7 本文之最大功率追蹤啟動模擬波形(200Ω)... 52 圖 4.8 本文之最大功率追蹤啟動模擬波形(200V) ... 53 圖 4.9 雙向直流直流轉換電路... 54 圖 4.10 直流鏈電壓控制器... 54 圖 4.11 直流微電網系統降壓模式 ... 56 圖 4.12 直流微電網系統升壓模式... 57 圖 4.13 直流微電網系統控制之模擬電路圖... 58
圖 4.15 未加入電壓平衡控制之電感電流漣波穩態模擬... 62 圖 4.16 電壓平衡控制之電感電流漣波穩態模擬... 62 圖 4.17 直流微電網系統控制啟動模擬... 64 圖 4.18 未加入電壓平衡控制之電感電流漣波穩態模擬... 65 圖 4.19 電壓平衡控制之電感電流漣波穩態模擬... 65 圖 4.20 直流微電網系統負載模擬(Rload = 200Ω)... 67 圖 4.21 直流微電網系統負載模擬(Rload = 50Ω) ... 67 圖 4.22 直流微電網系統切載模擬(Rload =50Ω→200Ω) ... 69 圖 4.23 直流微電網系統切載模擬(Rload =200Ω→50Ω) ... 69 圖 5.1 FPGA 元件基本結構 ... 71 圖 5.2 實作電路架構... 73 圖 5.3 實作電路照片... 74 圖 5.4 蓄電池組照片... 75 圖 5.5 太陽能模擬器儀控介面... 76 圖 5.6 閘極驅動電路... 77 圖 5.7 類比數位轉換電路... 78 圖 5.8 數位類比轉換電路... 79 圖 5.9 直流匯流排之太陽能最大功率追蹤實作波形... 80 圖 5.10 直流匯流排之電壓平衡控制實作波形... 81 圖 5.11 未啟動電壓平衡控制之電容電壓及電流漣波波形 ... 82 圖 5.12 電壓平衡控制之電容電壓及電流漣波波形... 82 圖 5.13 系統控制啟動之太陽能最大功率追蹤實作波形... 83 圖 5.14 系統控制啟動之電壓平衡控制實作波形... 84 圖 5.15 未啟動電壓平衡控制之電容電壓及電流漣波波形... 85 圖 5.16 電壓平衡控制之電容電壓及電流漣波波形... 85 圖 5.17 直流微電網系統負載波形(Rload = 200Ω)... 87 圖 5.18 直流微電網系統負載波形(Rload = 50Ω)... 87 圖 5.19 直流微電網系統切載波形(Rload =50Ω→200Ω)... 89
表目錄
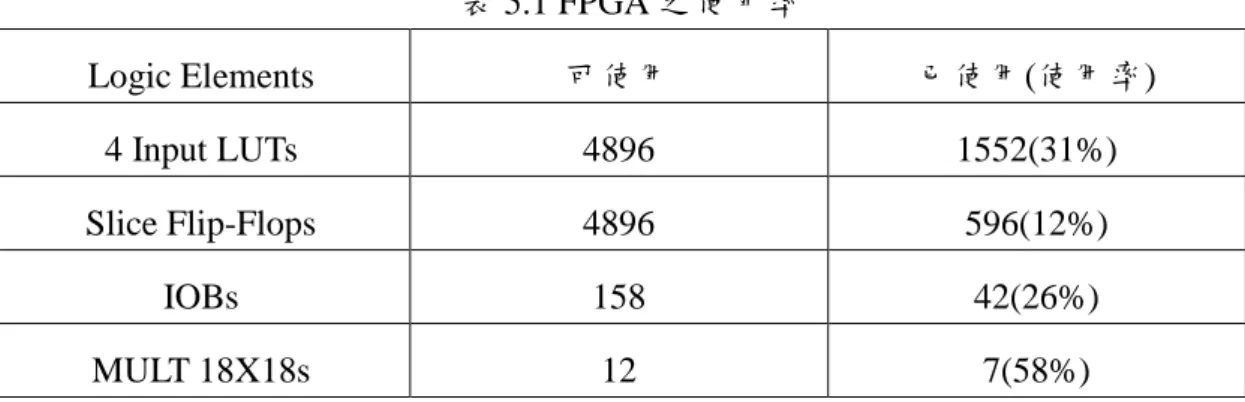
表 2.1 太陽能電池單顆模組參數... 12 表 2.2 最大功率追蹤技術之優缺點比較... 21 表 3.1 系統參數及控制參數... 33 表 4.1 太陽能電源模擬參數... 49 表 4.2 系統電路參數... 49 表 4.3 蓄電池 LONG WP22-12NE 之規格參數 ... 55 表 4.4 直流微電網系統參數及控制參數... 59 表 5.1 FPGA 之使用率 ... 72第一章
緒論
1.1 研究背景與發展現況
伴隨科技發展,全球能源需求量激增且環境暖化的問題使得社會環保意識的 提升,再生能源的應用越受到重視,如太陽能、風能、潮汐能、生質能、燃料電 池等等。太陽能為目前一種再生能源,在國內外已被廣泛使用及作為設備備用能 源,太陽能轉換成可使用之直流電力,進行供給負載所需之能量,其優點取得方 便、環保、無污染;然而太陽能轉換之能量會因陰晴不定的天氣使光照度、大氣 溫度不穩定,使得造成電力品質的不穩定,影響到光電轉換效率。此外,因太陽 能電池效率低及且昂貴,為有效利用太陽能,需要對太陽能發電進行有效控制, 因此許多文獻對最大功率追蹤控制技術[1]-[20]及高效能轉換器[10]-[13]來進行 研究。太陽能發電系統(PHOTOVOLTAIC SYSTEM)意指使用太陽能光電效應產生直 流電經由電力轉換器將其轉換可靠之電力送至負載,太陽能發電系統[10]-[16]可 分 為 獨 立 系 統 (Stand-Alone System)[10]-[14] 及 電 網 並 聯 系 統 (Grid-Connection System)[2],[12],[16]。獨立系統為獨立輸出供給負載或對蓄電池充電,或可搭配 儲能設備來供給負載,但供電可靠度較差;電網並聯系統為太陽能發電系統並聯 於市電或作為輔助電力輸出,可以穩定供電,但並聯系統控制複雜度較高。本文所提出是以搭配儲能系統作為獨立系統[3]-[4],[15],[18]-[19]。
本文提出太陽能供電之獨立直流微電網系統,架構分別為升壓直流/直流轉 換 器 (Boost DC/DC Converter) , 雙 向 直 流 直 流 轉 換 器 (Bidirectional DC/DC Converter)及控制架構。升壓直流/直流轉換器為三階層升壓電路架構作為最大功 率追蹤及電容電壓平衡之控制,利用交錯技術(Interleaving Technique)應用於三階 層升壓電路來減少輸入電流漣波,開關只需承載輸出電壓之ㄧ半,且降低開關切 換損耗。 三階層升壓電路中,本文提出以回授一電流迴路應用於三階層升壓電路實現 太陽能最大功率點追蹤及電壓平衡控制。使用三階層升壓電路中會產生上下電容
用此電流漣波關係提出電壓平衡控制器改善電容電壓不平衡。雙向直流直流轉換 器為維持直流鏈電壓穩定下,太陽能發電維持在最大功率點輸出下,供給負載過 多或不足,電池可以即時充電或放電,平衡太陽能及負載功率穩定。
1.2 研究目的
有鑒於解決直流微電網系統於供電在負載上之不穩定性,本論文將採用以兩 級之電路作為整個系統的硬體架構核心,包括三階層升壓電路以及雙向直流直流 轉換器。維持直流鏈電壓穩定下,太陽能發電在最大功率點輸出下,供給負載過 多或不足,電池可以即時充電或放電,達到平衡太陽能及負載功率穩定之目的。 另外在太陽能電源於三階層升壓電路控制中,本文提出以回授一電流迴路控制方 式,省略電壓感測器裝置,完成太陽能最大功率追蹤以及電壓平衡控制,更進一 步節省系統成本。故本論文針對獨立直流微電網系統,發展出以 FPGA XC3S250E 為控制器核心並使用硬體描述語言(Verilog HDL)來設計,將系統各個功能做模組 化實現,最後與外部驅動電路結合,設計出一套以 FPGA 晶片為基礎之太陽能供 電之獨立直流微電網系統。本文使用 PSIM 進行模擬與設計,驗證實驗結果並做 出分析與比較。1.3 本文架構
本文共有五個章節,各章節之大綱內容概述如下 第一章:說明本論文之研究目的以及相關文獻參考。 第二章:介紹太陽能電池、電路原理、種類、特性及最大功率追蹤技術。 第三章:介紹本文所使用三階層升壓電路控制策略,說明本文提出之電壓平衡控 制。 第四章:介紹本文所使用太陽能供電之直流微電網系統架構,說明工作原理,最 後進行電腦模擬驗證。 第五章:對實際電路做逐一簡介,並將實作量測結果進行討論與分析。 第六章:總結本論文之研究成果以及主要貢獻。第二章
太陽能電池介紹
2.1 太陽能電池簡介
太陽能電池是一種能量轉換的光電元件,它是經由太陽光照射後,把光的能 量轉換成電能,此種光電元件稱為太陽電池(Solar Cell)。從物理學的角度來看, 有人稱之為光伏電池(Photovoltaic,簡稱 PV), photo 就是光(light),而 voltaic 就是伏特(voltage)。太陽能電池的發展最早開始追溯於西元 1839 年法國物理學 家 A.E.Bequerel 發現了當光照射在導電材質時會產生電壓差的光伏特效應 (Photovoltaic Effect)。西元 1849 年「光伏」(photovoltaic)才出現在英語字串,意
指由光產生電動勢,即光產生電壓。西元 1876 年就已經由 W.G.Adams 與 R.E.Day 在硒(Se)的全固態元件中觀察到類似的光電流現象。到了西元 1883 年美國科學 家 Fritts 利用硒半導體研製出第一個太陽能電池,然而轉換效率僅有 1%。西元 1946 年美國科學家 Ohl 發現矽半導體也具有光伏特效應,使得矽(Si)逐漸被廣泛 的使用於太陽能電池材料。到了西元 1950 年,隨著半導體物理特性逐漸瞭解以 及製程技術的進步,西元 1954 年在 Bell 實驗室的科學家研製出光電轉換效率為 6%的單晶矽太陽能電池,而早期的發展希望能夠應用於太空船及人造衛星上, 然而製造太陽能電池價格相當昂貴造成太陽能發展受到限制。雖然太陽能電池價 格昂貴,但對當時太空發展歷史更邁向一大步,功不可沒。到了西元 1970 年的 能源(石油)危機造成全球經濟衰退,使世界各國發展更多能源的重要性以及人們 環保意識的提升,目的希望減少石化能源,開始逐漸往綠能產業開發,造就現今 太陽能、風能、潮汐能、地熱等等再生能源蓬勃發展。 太陽光的能量是取之不盡,用之不竭,從太陽表面所放射的能量換算成電力 約為 23 10 8 . 3 × kW,而太陽光經過一億五千萬公里的距離穿過大氣到達地球表面 剩下 14 10 8 . 1 × kW,雖然減少但足以供給地球現今的電力,所以若能廣泛使用龐 大的能源,對目前能源衰竭及地球環保等問題皆順利解決。 現今各國致力於發展太陽能產業,尤其以歐洲國家最為興盛,在 2011 年全
球太陽能發電安裝量達到歷史新高 27.4GW,且於太陽能周邊設備產業鏈 中,目前台灣廠商在此領域活耀成長。
2.2 太陽能電池發電原理
太陽能電池發電原理,利用太陽電池吸收 0.4μm~1.1μm 波長(矽半導體)的 太陽光,將光能直接轉變成電能輸出的一種發電方式。太陽能電池其基本構造是 運用 P 型與 N 型半導體接合而成如圖 2.1 所示。半導體材料為矽,在半導體中摻 入不同的雜質,做成 P 型與 N 型半導體,利用 P 型半導體有個電洞及 N 型半導 體多了一個自由電子的電位差來產生電流。所以當太陽光照射時,光能將矽原子 中的電子激發出來,而產生電子-電洞對,電子和電洞會受到內建電場的影響, 分別被 N 型及 P 型半導體吸引(電洞往電場方向移動,而電子則往相反的方向移 動),而聚集在兩端。外部負載用電極連接起來,形成電流迴路。 負 載 n型層 p型層 pn接合部 (空乏區) 表面電極 背面電極 電 流 太陽能光 圖 2.1 太陽能電池構造圖2.3 太陽能電池種類
目前太陽能電池材料種類繁多,依製作材質可分為矽基材料、多化合物及有 機半導體型三種。矽基材質又可以分為結晶矽型與非晶矽型,而結晶矽依據其製 程不同有可分為單晶矽晶、多晶矽晶與多晶矽薄膜,而目前太陽能光電系統應用
最為廣泛;化合物型材質依據其化學性質不同可分為 III-V 族(砷化鎵(GaAs)
、
磷化銦(InP)、磷化鎵銦(InGaP))及 II-VI 族(碲化鎘(CdTe)、硒化銦銅(CuInSe )),2
目前應用於太空及聚光型太陽能光電系統居多;有機半導體型為製程中導入有機 物和奈米科技可分為有機染料型及有機薄膜型,現階段因有機材料較少及成本 高,為屬於研發階段。太陽能電池的分類如圖 2.2 所示。 太陽能電池 晶矽型 多化合物型 有機半導體型 結晶矽 非晶矽 單晶矽晶 多晶矽晶 多晶矽薄膜 III-V族 II-VI族 砷化鎵(GaAs) 磷化銦(InP) 磷化鎵銦(InGaP) 碲化鎘(CdTe) 硒化銦銅(CuInSe2) 有機薄膜型 有機染料型 圖 2.2 太陽能電池分類圖
依據各太陽能電池種類之特性及優缺點,如下說明: (1) 晶矽型太陽能電池: 單晶矽型太陽能電池-其發電能力及電壓範圍較廣泛,光電轉換效率較高, 較其他晶矽型使用年限較長,年限壽命可達 20 年至 25 年左右。然而其製作時間 較為長且價格昂貴,目前市面產品其轉換效率為 12~20%。。 多晶矽型太陽能電池-其製程技術較簡單及價格較便宜,大幅應用於地面型 光電系統。然而其光電轉換效率較低,目前市面產品其轉換效率為 10~18%。 非晶矽型太陽能電池-其封裝成本可省略使生產成本較低及價格較便宜,且 應用範圍最為廣泛。然而其光電轉換效率為最低的且年限壽命較短,目前市面產 品其轉換效率為 6~9%。。 (2) 多化合物型太陽能電池: III-V 族太陽能電池-光電轉換效率為目前最高的且抗輻射特性較高的,多泛 應用於太空及聚光型太陽能光電系統居多。然而生產成本高且複雜使價格昂貴, 目前市面產品其轉換效率為 18~30%。。 II-VI 族太陽能電池-大面積薄膜型製程較簡單且可作成多晶矽型薄膜元件。 相對的生產成本高,其化學性質較對環境有汙染影響,目前市面產品其轉換效率 為 10~12%。 (3) 有機半導體型太陽能電池: 有機薄膜型電池及有機染料型電池為目前新材料製程技術較簡易且可大面積化 及高均勻化,但現階段有機材料較少使材料成本高,使產品昂貴。目前有機染料 型電池其轉換效率為 12%,而有機薄膜型電池其轉換效率為 3-5%。
2.4 太陽能電池電路特性
太陽能電池不同於直流電源為固定電壓輸出,其電流-電壓關係輸出特性為 非線性。太陽能電池其等效電路[1]如圖 2.3 所示,太陽能電池輸出之電流電壓關 係如式(2.1)所示。 sc I Id Rsh V S R L O A D Sunlight I 圖 2.3 太陽能電池等效電路 sh S k S s sc R I R V nkT I R V q I I I − + × − × + − = exp( ( )) 1 (2.1) 式(2.1)其中參數定義為 I :太陽能電池輸出電流 sc I :太陽能電池最大光電轉換電流(短路電流) s I :二極體逆向飽和電流 d I :二極體電流 V :太陽能電池輸出電壓 n :介電常數(通常為 1~2) k:波茲曼常數(1.3806505×10−23JK−1) k T :太陽能電池表面溫度(絕對溫度°K) q:電子電荷量(1.6×10−19C) S R :太陽能電池等效串聯電阻 sh R :太陽能電池等效並聯電阻[
( )]
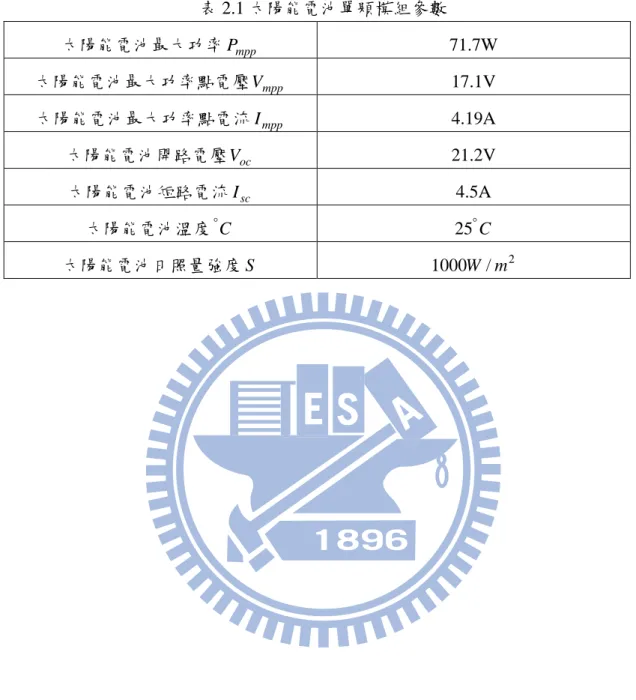
100 sso i k r i sc I k T T S I = + − (2.2) − = exp (1 1 ) 3 k r g r k rr s T T nk qE T T I I (2.3) 式(2.2)及(2.3)其中參數定義為 i S :日照量強度(W/ m2) sso I :工作在參考溫度和日照量1000W/m2條件下,所量測之短路電流值 i k :太陽能電池短路電流溫度係數 r T :太陽能電池參考溫度(絕對溫度°K) rr I :太陽能電池在T 時之逆向飽和電流 r g E :半導體跨越能隙時所需能量 電路上等效並聯電阻R 相當大,其等效串聯電阻sh R 相當小(S mΩ),故可將式(2.1) 改寫成式(2.5)所示,其太陽能電池理想等效電路如圖 2.4 所示。 sc I Id V L O A D Sunlight I 圖 2.4 太陽能電池理想等效電路 − − = exp( ) 1 k s sc nkT qV I I I (2.5) 將日照量強度固定為 2 / 1000W m 及表面溫度為25°C,可將式(2.5)簡化為式(2.6)。 )]} 1 ) [exp(( 1 { − 1 2 − = m sc K K V I I (2.6) 01175 . 0 1 = K (2.7) m K K2 = 4 (2.8) + − = sc mpp sc I K I K I K 1 1 3 ) 1 ( ln (2.9) ) 1 ln( 1 1 4 K K K = + (2.10) ) ln( ) ln( 4 3 oc mpp V V K K m= (2.11) 式(2.6)至(2.10)其中參數定義[13]為 oc V :太陽能電池開路電壓 mpp I :太陽能電池最大功率點電壓 mpp V :太陽能電池最大功率點電流 由式(2.6)至(2.11)中可以觀察出太陽能電池輸出電壓、電流與最大功率點之 電壓、電流關係式。從式(2.5)中可以得知,不同的日照量強度或溫度條件下可以 得到不同的輸出電壓與電流曲線。表 2.1 為 PSIM 模擬之太陽能電池在表面溫度 為25°C及日照量強度為1000W /m2單模組之參數值,而不同日照量強度與不同 溫度下的太陽能電池特性曲線,如圖 2.5 與圖 2.6 所示。從圖 2.5 可觀察出,當 日照量強度逐漸提高時,使太陽能電池所輸出之功率隨之增加;相反地,太陽能 電池所輸出之功率隨之減少。從圖 2.6 可觀察出,當表面溫度逐漸上升時,使太 陽能電池所輸出之功率隨之減少; 相反地,太陽能電池所輸出之功率隨之增加。 從輸出電流-電壓曲線及功率-電壓曲線可以得知功率與日照量強度為成正比,而 表面溫度為成反比。
0 5 10 15 20 25 2 / 1000W m 2 / 800W m 2 / 600W m 2 / 400W m 2 / 200W m 2 / 100W m Voltage(V) Current(A) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 (a) 0 5 10 15 20 25 Voltage(V) 2 / 1000W m 2 / 800W m 2 / 600W m 2 / 400W m 2 / 200W m 2 / 100W m 8 16 24 32 40 48 56 64 72 80 Power(P) (b) 圖 2.5 不同日照量強度下之太陽能電池特性曲線(表面溫度25°C) (a)I-V 曲線(b)P-V 曲線
C ° 5 0 Current(A) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 C ° 65 C ° 45 C ° 25 C ° 85 C ° 105 5 10 15 25 Voltage(V) 20 (a) 0 5 10 15 25 Voltage(V) 20 8 16 24 32 40 48 56 64 72 80 Power(P) C ° 5 C ° 65 C ° 45 C ° 25 C ° 85 C ° 105 (b) 圖 2.6 不同表面溫度下之太陽能電池特性曲線(日照量強度 2 / 1000W m ) (a)I-V 曲線(b)P-V 曲線
表 2.1 太陽能電池單顆模組參數 太陽能電池最大功率Pmpp 71.7W 太陽能電池最大功率點電壓Vmpp 17.1V 太陽能電池最大功率點電流Impp 4.19A 太陽能電池開路電壓V oc 21.2V 太陽能電池短路電流I sc 4.5A 太陽能電池溫度 C° 25°C 太陽能電池日照量強度S 1000W /m2
2.5 太陽能最大功率追蹤技術
從圖 2.5(a),(b)及圖 2.6(a),(b)中可得知太陽能電池的輸出功率受限於表面溫 度、日照量強度、元件老化及光電材料等影響,且在太陽能電池特性上因電流(I)-電壓(V)為非線性關係,使得功率(P)-電壓(V)曲線上存在於最大功率點。為了使 太陽能電池發揮最大效能,因此必須控制太陽能電力端功率輸出。為了讓太陽能 電池可在不同工作環境下維持最大功率輸出下,許多文獻[1]-[21]提出多樣性的 最大功率追蹤控制技術(Maximum Power Point Tracking,MPPT),不同所提出的 方法其複雜及效能程度各有差異,因此最大功率追蹤技術在太陽能電池發展中為 不可或缺的角色。以下本文介紹較為常見最大功率追蹤技術:擾動觀察法、增量 電導法、開路電壓法、短路電流法、實際量測法、直線近似法、模糊控制法、類 神經網路法。2.5.1 擾動觀察法
擾動觀察法(Perturb & Observe Algorithm , P&O )[1]為目前大多數人應用最 大功率追蹤技術的方法之ㄧ,此方法藉由控制命令 (責任週期、電壓命令或電流 命令)進行擾動觀察回授之電壓、電流值,運算得知當前功率與前一刻功率進行 比較,判斷功率擾動值為正或為負時,決定控制命令的擾動量的增減,來達到追 蹤至最大功率點。從圖 2.5 可得知是依擾動電壓觀察功率增減的趨勢,當 0 /dV > dP , 可知在最大功率點(MPP)之左邊範圍; dP/dV <0,可知在最大功 率點(MPP)之右邊範圍; 若dP/dV =0, 可知位於在最大功率點(MPP)。使用較 小的擾動量則追蹤到最大功率點的時間較長,但相對在最大功率點附近的擾動相 對較小且較準確;使用較大的擾動量可加快速度追尋最大功率點,但也會造成系 統在最大功率點附近劇烈振盪,所以參數擾動量必須考慮之。圖 2.7 所示為擾動 觀察法控制方塊圖,圖 2.8 所示為擾動觀察演算法流程圖。
PV array
I
DC/DC Converter
Perturb & Observe Algorithm (MPPT) V L O A D PWM singal 圖 2.7 擾動觀察法控制方塊圖 ] [ ] [ ] [n V n In P = × ] 1 -[ ] [n Pn P > ] 1 -[ ] [n V n V > NO YES ] 1 -[ ] [n V n V > D n D n D[ ]= [ ]+∆ D[n]=D[n]−∆D D[n]=D[n]+∆D D[n]=D[n]−∆D YES NO NO YES ] [n D ] [ ], [n In V Measure 圖 2.8 擾動觀察演算法流程圖
2.5.2 增量電導法
增量電導法(Incremental Conductance Algorithm , InCond ) [1]的概念也是依 據太陽能電池功率(P)-電壓(V)之斜率比來追蹤最大功率點。若所追尋電壓點為 mpp V ,以得到太陽能電池輸出得到最大功率Pmpp,而(dP /dV)關係式斜率之結果 為零。故將此功率式對電壓一次微分,可將得到式(2.12)及(2.13)。 0 ) ( = + = = dV dI V I dV IV d dV dP (2.12) 將式(2.12)整理成為 V I dV dI − = (2.13) 式(2.13)中dI為增量前後之電流差值,dV 為增量前後之電壓差值。當太陽能電 池電導值I /V與量測增量值dI /dV 相等時,表示已達到最大功率點,此時不必 再對系統進行下一次擾動,此為增量電導法之原理。圖 2.9 所示為增量電導法控 制方塊圖,圖 2.10 所示為增量電導演算法流程圖。增量電導法與觀察擾動法都 因增減量值(擾動量)的大小會對系統追蹤到最大功率點的速度的影響,相較之 下,增量電導法穩定度較佳。 PV array I DC/DC Converter Incremental Conductance Algorithm (MPPT) V L O A D PWM singal 圖 2.9 增量電導法控制方塊圖
] 1 [ ] [ ] [ ] 1 [ ] [ ] [ − − = − − = n V n V n dV n I n I n dI 0 ] [n = dV V I dV dI/ =− / NO YES 0 ] [n = dI D n D n D[ ]= [ ]−∆ D[n]=D[n]+∆D D[n]=D[n]-∆D D[n]=D[n]+∆D YES NO NO YES ] [n D ] [ ], [n I n V Measure V I dV dI/ >− / dI[n]>0 NO YES NO YES 圖 2.10 增量電導演算法流程圖
2.5.3 開路電壓法
開路電壓法(Open Circuit Voltage Algorithm)[20]的概念為最大功率點時的電 壓點Vmpp約略為K 倍數的太陽能開路電壓oc V ,如式(2.14)所示。而常數oc K 約oc 略為 0.71~0.78 區間,所以將太陽能電池電壓操作在此範圍,即可完成追尋太陽 能最大功率點,此為開路電壓法之原理。此方法不需複雜運算且只需回授電壓即 可,但是無法有效追尋到實際最大功率點,而是趨近於最大功率點範圍內,且問 題是必須間隔時間測量開路電壓,因斷開負載使功率之損耗,使系統轉換效率較 差。圖 2.11 所示為開路電壓法控制方塊圖。 oc oc mpp K V V ≅ × (2.14) PV array DC/DC Converter
Open Circuit Voltage Algorithm (MPPT) oc V L O A D PWM singal 圖 2.11 開路電壓法控制方塊圖
2.5.4 短路電流法
短路電流法(Short Circuit Current Algorithm)[20]與開路電壓法概念相近,最
大功率點時的電流點Impp約略為K 倍數的太陽能短路電流sc I ,如式(2.15)所sc 示。而常數K 約略為 0.9~0.95 區間,所以將太陽能電池電流操作在此範圍,即sc 可完成追尋太陽能最大功率點,此為短路電流法之原理。此方法不需複雜運算且 只需回授電流即可,但是無法有效追尋到實際最大功率點,而是趨近於最大功率 點範圍內,且問題與開路電壓法一樣,必須間隔時間測量短路電流,因斷開負載 使功率之損耗,使系統轉換效率較差。圖 2.12 所示為短路電流法控制方塊圖。
sc sc mpp K I I ≅ × (2.15) PV array sc I DC/DC Converter
Short Circuit Current Algorithm (MPPT) L O A D PWM singal 圖 2.12 短路電壓法控制方塊圖
2.5.5 實際量測法
實際量測法(Actual Measurement Algorithm)的概念主要利用額外一片小太陽能電 池當做偵測標準,每隔固定時間偵測此電池的開路電壓及短路電流,將所有量測 之結果建立參考模型,並計算出在此大氣環境條件下太陽能最大功率點之電壓及 電流,配合控制電路使太陽能電池操作在此電壓及電流下,即可達到最大功率追 蹤。此法最大好處是藉由實際量測來建立參考模型作為依據,因此可精準達到控 制效果,也可避免太陽能電池元件老化所造成之不準確問題。然而它必須搭配額 外的太陽能電池及偵測電路,增加成本,所以較適合大功率的太陽能供電系統, 對於小型功率供電系統來說,比較不符合成本上的需求。圖 2.13 所示為實際量 測法控制方塊圖。
PV array I DC/DC Converter Actual Measurement Algorithm (MPPT) V L O A D PWM singal PV array 圖 2.13 實際量測法控制方塊圖
2.5.6 直線近似法
直線近似法(Straight-line Approximation Algorithm)[21]的概念為利用dP /dI,利用
一直線來近似於在同表面溫度條件下不同日照量強度的最大功率點,系統操作於 此線上,實現最大功率追蹤法。此法雖簡單也有一定精準度,但必須事先分析太 陽能電池特性(測量不同日照量強度),且越在低日照量強度下,會略為失為準 確,造成系統效率差。圖 2.14 所示為直線近似法控制方塊圖。圖 2.15 所示為不 同日照量強度下電流-電壓曲線之直線近似線。 PV array I DC/DC Converter Straight-line approximation Algorithm (MPPT) V L O A D PWM singal 圖 2.14 直線近似法控制方塊圖
0 5 10 15 20 25 2 / 1000W m 2 / 800W m 2 / 600W m 2 / 400W m 2 / 200W m 2 / 100W m Voltage(V) Current(A) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Straight-line 圖 2.15 不同日照量強度下電流-電壓曲線之直線近似線圖
2.5.7 模糊控制法
模糊控制法(Fuzzy Logic Algorithm)[15]此控制法為太陽能電池達到最大功 率點時,控制器自行調整擾動量,減少在最大功率點附近來回過大的現象,減少 造成系統震盪的功率損失,進而有效提升輸出功率,並且在日照量強度快速變化 時,控制器也能快速反應調整到最大功率點。然而缺點為運算量多且複雜。
2.5.8 類神經網路法
類神經網路法(Neural Network Algorithm)利用所量測之大氣環境條件,經過 自我訓練與模型,產生太陽能最大功率點參考模型,藉由控制器達到最大功率點 追蹤。雖可快速反應到最大功率點,但與模糊控制法一樣,因訓練模型使運算量 多且複雜。
2.5.9 各最大功率追蹤技術之比較
本文介紹之擾動觀察法、增量電導法、開路電壓法、短路電流法、實際量測法、 直線近似法、模糊控制法、類神經網路法七種各最大功率追蹤技術之優缺點比較 整理如表 2.2 所示。 表 2.2 最大功率追蹤技術之優缺點比較 最大功率追蹤技術 優點 缺點 擾動觀察法 廣泛應用、結構簡單 在最大功率點時,因擾動量 大使震盪幅度大,且大氣條 件變化劇烈時偵測緩慢 增量電導法 減少在最大功率點震 盪且大氣條件變化劇 烈時可迅速偵測 感測器之精確度決定最大 功率追蹤誤差 開路電壓法 簡單且量測參數最少 間隔時間測量開路電壓,因 斷開負載使功率之損耗,系 統轉換效率較差。 短路電流法 簡單且量測參數最少 間隔時間測量短路電流,因 斷開負載使功率之損耗,系 統轉換效率較差。 實際量測法 以實際測量建立太陽 能最大功率追蹤模型 可避免太陽能電池元 件老化 搭配額外的太陽能電池及 偵測電路,增加系統成本 直線近似法 簡單且一定精準度 在低日照量強度條件下,無 法追尋到最大功率點 模糊控制法 類神經網路法 快速反應到最大功率 點,減少系統震盪的功 率損失 系統運算量多且複雜2.6 太陽能發電系統
太陽能發電系統(Photovoltaic System, P.V. System)主要功能為太陽能電池直 接將光能轉換成直流電,而太陽能電池所輸出之功率,其受到日照量強度、表面 溫度、負載及元件劣化等條件所影響,太陽能發電系統通常以功率轉換器來達到 最大功率追蹤,再藉由直流/交流轉換器供給市電或負載使用。目前常見供電型 態,可分為獨立型太陽能發電系統[10]-[14]及市電並聯型太陽能發電系統 [2],[12],[16],以下本文介紹此兩種類型。
2.6.1 獨立型太陽能發電系統
獨立系統(Stand-Alone System)為透過功率轉換器獨立輸出供給負載,由於太 陽能受限於大氣環境影響,無法穩定功率輸出使供電不穩,所以大多獨立型發電 系統搭配儲能設備(燃料電池、蓄電池),而電池可以即時充電或放電,平衡太陽 能及負載功率穩定,且透過功率轉換器供應於負載,穩定供電。由於儲能設備成 本較高且體積大,所以大多應用於偏遠地區及未鋪電力的地區。圖 2.16 所示為 獨立型太陽能發電系統圖。本文所提出是以搭配儲能系統作為獨立系統。 PV array DC/DC Converter L O A D DC/AC(DC) Converter Power Converter Battery 圖 2.16 獨立型太陽能發電系統圖2.6.2 市電並聯型太陽能發電系統
市電並聯系統(Grid-Connection System)為太陽能發電系統並聯於市電或作 為輔助電力輸出,可以穩定供電,且不需搭配儲能系統,因此系統建構成本較獨 立系統低。然而在失去市電時發生孤島效應,所以必須搭配因應電路防範孤島效 應。太陽能發電系統依發電容量可分為分散型及集中型,集中型系統為發電量 20kW 以上,通常為發電站及大型工廠輔助設備;而發散型系統為發電量 5kW 以 下,多應用於家庭住宅及路燈。圖 2.17 所示為並聯型太陽能發電系統圖。 PV array DC/DC Converter DC/AC Converter Grid 圖 2.17 市電並聯型太陽能發電系統圖第三章
三階層升壓電路控制策略
3.1 升壓型直流直流轉換器
升壓型直流/直流轉換器(Boost Converter)電路圖如下圖 3.1 所示。 in V L L v L i T D L O A D C o V o i 圖 3.1 降壓型直流直流轉換器電路圖 升壓型直流/直流轉換器是產生一個大於輸入電壓V 的輸出電壓in V 。主要應o 用於直流電壓調節以及電力電子控制。升壓型直流/直流轉換器在操作上可以分 為連續導通模式以及非連續導通模式兩種,決定的關鍵因素是電感電流i 的值有L 無降為零,如果有,那就屬於非連續導通模式;反之,則為連續導通模式。由於 本文在實作應用上為操作在連續導通模式,所以將該模式進行較細膩之分析。在 連續導通模式底下,當開關導通的時候升壓型直流/直流轉換器的等效電路如圖 3.2(a)所示。 in V L L v L i L O A D C o V o i in V L L v L i L O A D C o V o i (a) (b) 圖 3.2 升壓型直流/直流轉換器等效電路 (a)Ton (b)Toff此時電感電壓v 為L V ,電壓值為正,由於電感電流對時間微分即是電感電in 壓,如下式(3.1)所示 ) (t i dt d L vL = L (3.1) 在電感電壓為固定正值的時候,電感電流為一斜率為正的斜直線。 若開關不導通時,等效電路如同圖 3.2(b)所示。假設輸出端電容夠大,此時 電感電壓v 為L Vin − ,電壓值為負,電感電流為一斜率為負的斜直線。如下圖Vo 3.3 所示。 in
V
o inV
V
−
sT
ont
t
off Lv
t
t
Li
∆
Li
LI
圖 3.3 升壓型直流直流轉換器電感電壓與電流關係圖 由於在穩態下,電感符合伏秒平衡,所以寫出電壓與時間的關係如下式所示。 0 0 0 =∫ +∫ = ∫ Ts on t L on t L s T Ldt v dt v dt v (3.2) 將電感電壓代入上式,可以得到 0 ) )( ( − − = + in o s on on int V V T t V (3.3) 將上式展開,經過化簡可以得到輸入電壓與輸出電壓之比如下式(3.4)所示。 D t T V V off s in o − = = 1 1 (3.4) 理想上輸入功率等於輸出功率,可以得到輸入電流與輸出電流之比如下式(3.5) 所示。D I I L o = 1− (3.5) 其中D為開關的工作週期比(Duty ratio)。經由上式可以發現,在升壓型直流 /直流轉換器中,若操作在連續導通模式下,輸出電壓與輸入電壓有一個非線性 關係。電流部分,電感電流i 可以分為直流部分(L I )與漣波部分(L ∆ )。漣波大小iL L i ∆ 為 s in on in on L L DT L V L t V L t v i = = = ∆ (3.6) 如果電感值L越大或者是導通時間t 越短,電感電流的漣波就會越小。在on 不更改導通時間的前提下,如果電感值足夠大,那可以將電感電流視為一直流電 流。然而使用越大的電感會使電感體積變大且笨重,增加系統成本,所以下一節 本文介紹三階層升壓電路使用交錯技術(Interleaving technique)切換減少電流漣 波。
3.2 三階層升壓電路
圖 3.4 為三階層升壓直流/直流轉換器之通用電路架構,兩個開關T 與1 T 串2 接而成,取代圖 3.1 之傳統電路單一開關T;兩個電容C1與C2串接在一起,取代圖 3.1 之傳統電路單一電容C。至於串接開關與串接電容間,透過兩個二極體D 與1 2 D 互相連接,為整體之三階層升壓電路架構[2]。 L 1 T 2 T 1 C 2 C vC2 1 C v 1 D 2 D L i L O A D 0 1 0 1 1 tri v 2 tri v 1 cont v 2 cont v 1 G 2 G dc v in V Interleaving technique 圖 3.4 三階層升壓電路圖 因電感及二極體和開關切換組態,三階層升壓電路可分為四種導通模式如圖 3.5 所示。在模式 1 時,兩個開關皆為導通,使電容皆為放電狀態; 在模式 2 時, 上臂開關導通,下臂開關截止,使下臂電容為充電狀態,上臂電容為放電狀態; 在 模式 3 時,下臂開關導通,上臂開關截止,使上臂電容為充電狀態,下臂電容為 放電狀態;而模式 4 時,兩個開關皆為截止,使電容為充電狀態。in V L L v L i L O A D 1 C dc v 2 T 2 C 1 T in V L L v L i L O A D 1 C dc v 2 T 2 C 1 T (a) (b) in V L L v L i L O A D 1 C dc v 2 T 2 C 1 T in V L L v L i L O A D 1 C dc v 2 T 2 C 1 T (c) (d) 圖 3.5 三階層升壓電路開關組態圖 (a) 模式 1:上下臂開關導通與電容皆放電模式 (b) 模式 2:上臂開關導通與下臂電容充電模式 (c) 模式 3:下臂開關導通與上臂電容充電模式 (d) 模式 4:上下臂開關截止與電容皆充電模式
交錯技術(Interleaving technique)如圖 3.4 所示,由控制命令vcont1與三角波vtri1
比較後得到開關訊號G ;由控制命令1 vcont2與三角波vtri2比較後得到開關訊號
2
G ,而三角波vtri1與vtri2為各差 180 度之訊號。控制命令和vcont1+vcont2 <1時, 三階層升壓電路運作順序為模式 2模式 4模式 3模式 4模式 2……,開關
切換及電感電壓與電流關係圖如圖 3.6 所示。控制命令和vcont1+vcont2 >1時,三
階層升壓電路運作順序為模式 1模式 2模式 1模式 3模式 1……,開關切 換及電感電壓與電流關係圖如圖 3.7 所示。
2 C in v V − dc in v V − on t toff L v t t L i t 1 C in v V − dc in v V − 2 T 1 T 2 4 3 4 2 Mode s T 圖 3.6 控制命令和vcont1+vcont2<1之開關切換及電感電壓與電流關係圖 in V 2 C in v V − on t toff L v t t L i t in V 1 C in v V − 2 T 1 T 1 2 1 3 1 Mode s T
若控制命令vcont1=vcont2 =D,電容C1=C2 =C,進行三階層升壓電路推導。 在D<0.5時,如圖 3.6 所示當在模式 2 的時候此時電感電壓v 為L Vin −vC2, 電壓值為正,電感電流為一斜率為正的斜直線;在模式 4 的時候此時電感電壓vL 為Vin−vdc,電壓值為負,電感電流為一斜率為負的斜直線; 在模式 3 的時候此 時電感電壓v 為L Vin −vC1,電壓值為正,電感電流為一斜率為正的斜直線; 在模 式 4 的時候此時電感電壓v 為L Vin −vdc,電壓值為負,電感電流為一斜率為負的 斜直線。在穩態下此時之電容電壓vC1 =vC2 =vdc/2。 由於在穩態下,電感符合伏秒平衡,將電感電壓代入,可以得到 0 ) 2 ( 2 ) 2 ( ) ( 2 ) 2 (Vin −vdc ton+ Vin −vdc Ts− ton + Vin −vdc ton = (3.7) 將上式展開,經過化簡可以得到輸入電壓與輸出電壓之比如下式(3.8)所示。 D t T V v off s in dc − = = 1 1 (3.8) 在D>0.5時,如圖 3.7 所示當在模式 1 的時候此時電感電壓v 為L V ,電壓in 值為正,電感電流為一斜率為正的斜直線;在模式 2 的時候此時電感電壓v 為L 2 C in v V − ,電壓值為負,電感電流為一斜率為負的斜直線; 在模式 1 的時候此時 電感電壓v 為L V ,電壓值為正,電感電流為一斜率為正的斜直線;在模式 3 的時in 候此時電感電壓v 為L Vin −vC1,電壓值為負,電感電流為一斜率為負的斜直線。 在穩態下此時之電容電壓vC1 =vC2 =Vo/2。 由於在穩態下,電感符合伏秒平衡,將電感電壓代入,可以得到 0 2 ) 2 ( ) )( 2 ( 2 2 ) 2 ( − + − − + on − s = in on s dc in s on in T t V t T v V T t V (3.9) 將上式展開,經過化簡可以得到輸入電壓與輸出電壓之比如下式(3.10)所示。 D t T V v off s in dc − = = 1 1 (3.10) 推導而出當開關的工作週期比D<0.5或D>0.5時,此輸入電壓與輸出電壓 之比與傳統單開關升壓電路相同,保有與傳統架構之輸入輸出特性。此電流上升 斜率或下降斜率上僅為Vin −vdc/2,與傳統單開關升壓電路,上升或下降斜率較 小,因此在同樣的開關切換頻率下,電流漣波可以較小。
從以上的推論,根據輸入電壓與輸出電壓大小相互關係,將操作區域分成兩 個,進而減少電流變化斜率,降低電流漣波,使電流漣波較傳統架構小。因此, 在相同的電感漣波下,三階層升壓型直流/直流轉換器可以使用較小電感值,電 感體積可以減小,節省系統成本;從另一角度來看,三階層升壓型直流/直流轉 換器可以用較小的開關切換頻率,減少開關切換損失,提高整體系統本身效率。 且在同樣的開關切換頻率下,因為三階層升壓電路架構之開關耐壓僅為傳統單開 關升壓電路架構二分之一,因此開關切換損失僅為傳統架構切換損失之一半,選 擇開關上,可以為耐壓較低的開關,使整體系統成本降低。
3.3 電壓平衡控制
接著,此電路架構也有特別注意兩個電容電壓彼此平衡的問題。若控制命令 1 cont v 與vcont2相等時,電容C 與1 C 因交錯技術互相充放電,理想上電容電壓2 vC1與 2 C v 是相等的。實際上,製造電容的材料有電阻,電容絕緣介質有損耗,各種原因導致電容變得不一致,如串聯等效阻抗 ESR(Equivalent Series Resistance)。如 果無法保持電容值彼此相等,其中一個電容電壓必會大於另外一個電容電壓,可 能會超過電容與開關選擇時的設計耐壓,造成電路元件損壞。因此在三階層升壓 電路控制架構之開關信號產生架構,必須確保兩個電容電壓彼此平衡。
3.3.1 文獻上控制器架構分析
為確保電容電壓平衡,文獻控制架構[2]如圖 3.8 所示。分別感測電容電壓 1 C v 與 2 C v ,經過電壓平衡控制器得到下臂開關控制訊號vcont2。當下臂電容電壓vC2大 於上臂電容電壓 1 C v ,因此要在避免單獨對下臂電容C 充電,增加下臂開關控制2 訊號vcont2多對上臂電容C 充電; 當上臂電容電壓1 vC1大於下臂電容電壓vC2,因 此要在避免單獨對上臂電容C 充電,減少下臂開關控制訊號1 vcont2多對下臂電容 2 C 充電。 Voltage Controller 2 Cv
2 contv
1 Cv
1 contv
圖 3.8 文獻電壓平衡控制架構 在 PISM 模擬環境下,模擬文獻上電壓平衡控制架構於三階層升壓電路,模 擬於電容電壓不平衡將兩個電容值為不同來進行控制,相關模擬參數如表 3.1 所 示。模擬負載平台為電阻100Ω,其模擬控制架構如下圖 3.9 所示。表 3.1 系統參數及控制參數 輸入直流電壓V in 100V 電感L 1mH 控制命令vcont1 0.75 電容C1, C2 1980uF 2420, uF 負載 100Ω 開關切換頻率 f s 20kHz 交錯技術 文獻電壓平衡控制架構 圖 3.9 模擬三階層升壓電路之文獻電壓平衡控制架構 模擬主要著眼於加入文獻電壓平衡控制前後之電容電壓 1 C v 與 2 C v 之變化波 形。加入前後之文獻電壓平衡控制兩個開關之跨壓 1 T V 與 2 T V 、電容電壓 1 C v 與 2 C v 及輸出電壓v 如圖 3.10 及圖 3.11 所示。 dc
dc v 2 C v 1 C v V 400 V 380 V 420 V 200 V 180 V 220 V 100 V 0 V 200 V 100 V 0 V 200 1 T V 2 T V us 50 圖 3.10 未加入文獻電壓平衡控制之波形 V 400 V 380 V 420 V 200 V 180 V 220 V 100 V 0 V 200 V 100 V 0 V 200 dc v 2 T V 1 T V 2 C v 1 C v
由模擬結果可看出當在電容值不相等時之電容電壓 1 C v 與vC2不平衡使開關 跨壓 1 T V 與VT2不一致,但輸出電壓與輸入電壓比與傳統單開關升壓電路相同。加 入電壓平衡控制時有效達到電容電壓 1 C v 與vC2平衡且開關跨壓VT1與VT2相等及 輸出電壓與輸入電壓比維持一致。
3.3.2 交錯取樣策略
其傳統之電壓平衡控制是以回授兩電壓迴路來進行平衡控制,然而感測器的 增加使成本大幅提高。因此本文提出一控制方法,僅一回授電流迴路控制達成兩 電容電壓平衡於三階層升壓電路,除了可以達到電壓平衡且成本因不需多餘之感 測器大幅降低,此輸入電流漣波可大幅減少。 因兩者電容電壓之不平衡,電感電流斜率不一致,使輸入電流因交錯技術之 電流漣波造成不一致現象,利用此電流漣波本文提出僅回授一電流迴路來進行電 壓平衡控制。為了取樣漣波電流值,本文提出交錯取樣策略,如圖 3.12(a)(b)所 示。 交錯取樣策略中,在開關切換週期T 下於各s Ts/4取樣電流。在I 取樣時間L 點中,在一個開關切換週期T 下位於三角波s vtri1位於波峰時或位於三角波vtri2位 於波谷時進行取樣電流,為I ;在L Ivc1取樣時間點中,在一個開關切換週期Ts下 於三角波vtri1從波谷經過Ts/4時進行取樣電流,為Ivc1;在Ivc2取樣時間點中, 在一個開關切換週期T 下於三角波s vtri2從波谷經過Ts/4時進行取樣電流,為 2 vc I 。交錯取樣策略中取樣之電流Ivc1與Ivc2作為電壓平衡控制器之輸入電流,而 L i 取樣出之平均電流I 作為最大功率追蹤控制器之輸入電流。 L1 tri v 0 1 1 G 2 G s contT v 1 s cont T v 2 L i 1 vc I 2 vc IIL s T 4 s T 2 tri v 0 1 sampling L I sampling 1 vc I sampling 2 vc I 1 cont v 2 cont v 0.5 0.5 tri f 2 tri f tri f t (a) 1 tri v 0 1 1 G 2 G s contT v 1 s cont T v 2 L i 1 vc I 2 vc I L I s T 4 s T 2 tri v 0 1 sampling L I sampling 1 vc I sampling 2 vc I 1 cont v 2 cont v tri f 2 tri f tri f t 0.5 0.5 (b) 圖 3.12 交錯取樣策略 (a) 2 1 C C v v >
3.3.3 本文提出電壓平衡控制策略
從交錯取樣策略中取之漣波電流值Ivc1與Ivc2,仔細觀察可以發現,因電容 電壓不平衡導致使兩電流值差不會為零。因此,交錯技術中開關T 及1 T 的工作週2 期與 1 C v 與vC2充放電相關,為了使vC1與vC2電壓平衡於三階層升壓電路,利用 電流漣波差,圖 3.13 所示為本文提出之電壓平衡控制器,開關T 的工作週期為2 2 contv 且由vcont1與平衡電壓變動量∆vcont2相加得之。vcont2為式(3.11)所示
) ( 2 1 1 2 1 2 vc vc i cont cont cont cont I I s k v v v v − + = ∆ + = (3.11) i k 為電壓平衡控制之積分增益,藉由開關T 來調節兩者電容電壓達到至平衡。 2 2 vc
I
1 vcI
s
k
i 1 contv
2 contv
∆
2 contv
圖 3.13 本文提出之電壓平衡控制器 依據開關信號狀態和及電容電壓狀況中電路推導出漣波電流之值Ivc1與Ivc2。 (1)開關信號狀態為<<vcont1+vcont2 <1>>之不同電容電壓狀況:下圖 3.14(a)(b)為電路開關組態vcont1+vcont2<1在不同電容電壓狀況下之電
流波形。電流漣波Ivc1與Ivc2如式(3.12)與(3.13)所示。 s cont cont in dc s cont C in L s cont cont in dc L vc T v v L V v T v L v V t i T v v L V v t i I 4 ) 1 ( ) ( 4 ) 1 ( ) ( 2 1 1 2 4 2 1 2 1 − − − − − + = − − − + = (3.12) 4 ) 1 ( ) ( 4 ) 1 ( ) ( 2 1 4 2 1 2 1 2 2 s cont cont in dc L s cont cont in dc s cont C in L vc T v v L V v t i T v v L V v T v L v V t i I − − − + = − − − − − + = (3.13)
1 G 2 G 1 t 0 t t2 t3 t0 s T L i 1 vc I 2 vc I s contT v 1 s cont T v 2 4 t 1 tri v vtri2 t (a) 1 G 2 G 1 t 0 t t2 t3 t0 s T L i 1 vc I 2 vc I s contT v 1 s cont T v 2 4 t 1 tri v vtri2 t (b) 圖 3.14 電路開關組態vcont1+vcont2 <1電壓不平衡之電流波形 (a) vC1 >vC2 (b) 2 1 C C v v < 2 vc I 與Ivc1電流漣波差為式(3.14)所示: s cont C in s cont cont in dc vc vc v v V v v V T v L v V T v v L V v I I 1 ) 2 1 ( 1 2 2 1 1 2 − − − − − − − − − = − (3.14)
將上式展開,經過化簡可以得到輸入電壓與如下式(3.15)所示 2 2 1 1) (1 ) 1 ( cont C cont C in v v v v V = − + − (3.15) 將式(3.15)代入式(3.14),可以得到 ) )( ( 2 ) ) ( ( ) ) ( ) ( ( 2 ) ( ) ( 2 1 2 1 1 2 1 2 1 1 1 2 2 2 1 2 1 1 2 1 1 2 1 2 1 1 2 2 2 2 1 2 1 2 C C cont s C cont cont cont cont cont C cont cont cont cont cont cont cont s C cont cont cont cont C cont cont cont cont s vc vc v v v L T v v v v v v v v v v v v v v L T v v v v v v v v v v L T I I − ≅ − ∆ + + − ∆ + − ∆ + + ∆ + = − + − − + = − (3.16) (2)開關信號狀態為<<vcont1+vcont2 >1>>之不同電容電壓狀況:
圖 3.15(a)(b)為電路開關組態vcont1+vcont2 >1電容電壓不平衡之電流波形時
L i 電流漣波中Ivc1與Ivc2如式(3.17)與(3.18)所示。 s cont cont in s cont in C L s cont cont in L vc T v v L V T v L V v t i T v v L V t i I 4 ) 1 ( ) 1 ( ) ( 4 ) 1 ( ) ( 2 1 1 2 4 2 1 2 1 − + + − − − = − + − = (3.17) 4 ) 1 ( ) ( 4 ) 1 ( ) 1 ( ) ( 2 1 4 2 1 2 1 2 2 s cont cont in L s cont cont in s cont in C L vc T v v L V t i T v v L V T v L V v t i I − + − = − + + − − − = (3.18) 2 vc I 與Ivc1電流漣波差為式(3.19)所示: s cont cont in s cont in C s cont in C s cont cont in vc vc T v v L V T v L V v T v L V v T v v L V I I ) 2 1 ( ) 1 ( ) 1 ( ) 2 1 ( 2 1 1 2 2 1 2 1 1 2 − + − − − = − − − − + = − (3.19) 將上式展開,經過化簡可以得到輸入電壓與如下式(3.20)所示 2 1 1 2) (1 ) 1 ( cont C cont C in v v v v V = − + − (3.20)
1 G 2 G 1 t 0 t t2 t3 t0 s T 1 vc I 2 vc I s contT v 1 s cont T v 2 L i 1 tri v vtri2 4 t t (a) 1 G 2 G 1 t 0 t t2 t3 t0 s T 1 vc I 2 vc I s contT v 1 s cont T v 2 L i 1 tri v vtri2 4 t t (b) 圖 3.15 電路開關組態vcont1+vcont2 >1電壓不平衡之電流波形 (a) vC1 >vC2 (b) 2 1 C C v v <
將式(3.20)代入式(3.19),可以得到 ) )( 1 ( 2 ) ) ( ) ( 1 ( ) ) ( ) ( 1 ( 2 ) 1 ( ) 1 ( 2 1 2 1 1 2 2 1 2 1 1 1 2 2 1 2 1 1 2 1 1 2 2 2 1 1 2 2 1 2 1 2 1 2 C C cont s C cont cont cont cont cont cont C cont cont cont cont cont cont s C cont cont cont cont C cont cont cont cont s vc vc v v v L T v v v v v v v v v v v v v v L T v v v v v v v v v v L T I I − − ≅ ∆ + − ∆ + + − − − ∆ + + ∆ + − = − + − − − + − = − (3.21) 在不同電容電壓及電路開關組態狀況下皆從式(3.16)及(3.21)中週期的電流 漣波差可視為電容電壓差。本文提出之方法不需感測各別電容電壓,只需單一電 流迴路,利用電流漣波差,來進行電壓平衡控制,達成兩者電容電壓之平衡。 根據圖 3.13 之控制架構,在 PSIM 模擬環境下,模擬本文提出之電壓平衡控 制架構於三階層升壓電路,藉由回授電感電流,經過交錯取樣策略得到漣波電流 值Ivc1及Ivc2,模擬於電容電壓不平衡將兩個電容值為不同來進行電壓平衡控 制,相關模擬參數如表 3.1 所示。模擬負載平台為電阻100Ω,其模擬控制架構 如下圖 3.16 所示。 交錯技術 本文之電壓平衡控制架構 交錯取樣策略 圖 3.16 模擬三階層升壓電路之本文電壓平衡控制架構