國
立
交
通
大
學
資訊科學與工程研究所
碩 士 論 文
車用行動通訊網路之連線時間分析
Communication Time Analysis in Vehicular Ad-Hoc Networks
研 究 生:陳信帆
指導教授:陳 健 教授
車用行動通訊網路之連線時間分析
Communication Time Analysis in Vehicular Ad-Hoc Networks
研 究 生:陳信帆
Student:Hsin-Fan Chen
指導教授:陳 健
Advisor:Chien Chen
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University In partial Fulfillment of the Requirements
For the Degree of Master
In
Computer Science July 2007
Hsinchu, Taiwan, Republic of China
車用行動通訊網路之連線時間分析
研究生 : 陳信帆 指導教授: 陳 健 國 立 交 通 大 學 資 訊 科 學 與 工 程 研 究 所中文摘要
近年來隨著無線網路快速發展,人們可以無所不在地使用網路,車用行動通 訊網路是無線移動網路中一種快速發展的新型態,它是由汽車的移動所構成的網 路模式,近來有不少針對車用行動通訊網路效能分析的研究,其中,大部分的研 究都是在探討通訊協定、傳送效率或是傳輸延遲,他們大部分的結果都是利用網 路模擬或是統計資料來取得。在車用行動通訊網路中,連線時間會影響到資料傳 輸與繞徑演算法的表現,所以有必要建立更精確的數學模型來正確預估其連線生 命週期,進而改善效能。所以在這篇論文中,我們提出一個數學分析模型來計算 出車用行動通訊網路在都會區中的期望連線時間,另外,我們考慮在每個十字路 口加上紅綠燈後,所造成連線時間的變化,我們一樣提出數學分析模型來分析其 期望連線時間。最後,我們將提出模擬結果來驗證期望連線時間數學模型的正確 性。 關鍵字:車用行動通訊網路、無線移動網路、連線時間Communication Time Analysis in Vehicular
Ad-Hoc Networks
Student: Hsin-Fan Chen Advisor: Dr. Chien Chen
Institute of Computer Science and Engineering National Chiao Tung University
Abstract
Since the recent rapid development of wireless mobile networks, people can access the network ubiquitously. Vehicular ad-hoc networks (VANETs) are an emerging new type of wireless mobile ad-hoc networks (MANETs). It’s a mobile network composed of moving vehicles. There are many researches in performance for VANETs. Among those, most researches focus on the communication protocol, delivery ratio, or transmission delay. They are mostly obtained by network simulation or statistical data. In VANETs, communication time will affect data transportation and the performance of the routing algorithm. It’s necessary to build a more accurate mathematical model to estimate the communication time. In this thesis, we present a mathematical analysis model to calculate the expected communication time (ECT) of VANETs in urban city. Furthermore, we consider adding a traffic light to each intersection to observe the influence to the ECT. Finally, we present simulation results to validate our mathematical model in ECT.
誌謝
本篇論文的完成,我要感謝這兩年來給予我協助與勉勵的人。首先要感謝我 的指導教授 陳健博士,即使這段期間遭遇了不少的挫折,陳老師對我的指導與 教誨使我都能在遇到困難時另尋突破,在研究上處處碰壁時指引明路讓我得以順 利完成本篇論文,在此表達最誠摯的感謝。同時也感謝我的論文口試委員,交通 大學的曾煜棋教授、簡榮宏教授以及工業研究院的蔣村杰博士,他們提出了許多 的寶貴意見,讓我受益良多。 感謝與我一同努力的學長張哲維、陳盈羽,由於我們不斷互相討論及在論文 上的協助,使我能突破瓶頸,研究也更為完善。另外我也要感謝實驗室的同學、 學弟們,王振仰、林政一、楊智強以及楊祐華等人,感謝他們陪我度過這兩年辛 苦的研究生活,在我需要協助時總是不吝伸出援手,陪我度過最煩躁與不順遂的 日子。 最後,我要感謝家人對我的關懷及支持,他們含辛茹苦的栽培,使我得以無 後顧之憂的專心於研究所課業與研究,我要向他們致上最高的感謝。Table of Content
中文摘要... i
Abstract ... ii
Chapter 1: Introduction ... 1
Chapter 2: Related work ... 7
Chapter 3: Expected communication time in VANETs ... 9
3.1 Opposite to Vertical Case ... 10
3.2 Parallel to Vertical case ... 17
3.3 Vertical to Opposite or Parallel case ... 23
Chapter 4: Expected Communication Time with Traffic Light ... 36
4.1 Opposite to Vertical Case with Traffic Light ... 37
4.2 Parallel to Vertical Case with Traffic Light ... 39
4.3 Vertical to Opposite or Parallel Case with Traffic Light ... 40
Chapter 5: ECT Formulation Result ... 41
5.1 ECT Formulation Result of Opposite to Vertical Case ... 41
5.2 ECT Formulation Result of Parallel to Vertical Case ... 43
5.3 ECT Formulation Result of Vertical to Opposite or Parallel Case ... 46
5.4 ECT Formulation result ... 48
Chapter 6: Formulation and Simulation Comparison ... 50
6.1 Formulation and Simulation Comparison in Opposite to vertical case ... 50
6.2 Formulation and Simulation Comparison in Parallel to vertical case ... 52
6.3 Formulation and Simulation Comparison in Vertical to Opposite or Parallel case ... 54
6.4 Formulation and Simulation Comparison of VANETs in urban city ... 55
6.5 Formulation and Simulation Comparison in Opposite to Vertical Case with Traffic Light ... 57
6.6 Formulation and Simulation Comparison in Parallel to Vertical Case with Traffic Light ... 59
6.7 Formulation and Simulation Comparison in Vertical to Opposite or Parallel Case with Traffic Light ... 61
6.8 ECT Formulation and Simulation Comparison with Traffic Light ... 63
Chapter 7: Conclusion ... 65
List of Figure
Figure 1: Random Waypoint Mobility Model ... 3
Figure 2: Manhattan Grid Mobility Model ... 3
Figure 3: Communication time ... 5
Figure 4: Number of turn during communication time ... 5
Figure 5: Opposite to Vertical Case; Parallel to Vertical Case; Vertical to Opposite or Parallel case ... 6
Figure 6: Opposite case of VANETs in urban city ... 11
Figure 7: Opposite to Vertical Case with turn probability pturn ... 12
Figure 8: Relation of s and location of MN ... 12 A Figure 9: Parallel to vertical with turn probability pturn... 18
Figure 10: Parallel case of VANETs in urban city ... 19
Figure 11: Relation of s and location of MN ... 19 A Figure 12: Vertical case ... 23
Figure 13: Relationship between entrance point of MN and B ... 26
Figure 14: relationship between and r ... 26
Figure 15: Vertical case of VANETs in urban city ... 27
Figure 16: Vertical to Opposite or Parallel Case with turn probability pturn ... 28
Figure 17: Specific value of angle ... 29
Figure 18: Value of i H ... 30
Figure 19: Relationship between v and range of angle B ... 31
Figure 20: Segment of v ... 32 B Figure 21: State of MN and A MN ... 37 B Figure 22: Opposite to Vertical Case with different turn probability ... 42
Figure 23: Opposite to Vertical Case with different gird size ... 43
Figure 24: Parallel to Vertical Case with different turn probability ... 44
Figure 25: Divide into two case vB vA and vAvB ... 45
Figure 26: Parallel to Vertical Case with different grid size ... 46
Figure 27: Vertical to Opposite or Parallel Case with different turn probability 47 Figure 28: Vertical to Opposite or Parallel Case with different grid size ... 48
Figure 29: ECT of VANETs in urban city with different turn probability ... 49
Figure 30: ECT of VANETs in urban city with different grid size ... 49
Figure 31: Formulation and Simulation Comparison in Opposite to Vertical Case ... 51
Figure 32: Formulation and Simulation Comparison in Parallel to Vertical Case ... 53
Figure 33: Formulation and Simulation Comparison in Vertical to Opposite or Parallel Case ... 54 Figure 34: Formulation and Simulation Comparison of VANETs in urban city . 56 Figure 35: Formulation and Simulation Comparison in Opposite to Vertical Case with Traffic Light ... 58 Figure 36: Formulation and Simulation Comparison in Parallel to Vertical Case with Traffic Light ... 60 Figure 37: Formulation and Simulation Comparison in Vertical to Opposite or Parallel Case with Traffic Light ... 62 Figure 38: Formulation and Simulation Comparison of VANETs in urban city with Traffic Light ... 63
List of Equation
Equation 1: ECT of VANETs in urban city ... 10
Equation 2: Calculate parameters of Opposite to Vertical Case ... 13
Equation 3: Minimum speed that v can reach number j cross ... 13 B Equation 4: Calculate T , 1 T and 2 T of Opposite to Vertical Case ... 15 3 Equation 5: PDF of v and B s ... 15
Equation 6: ECT formulation of Opposite to Vertical Case ... 17
Equation 7: Calculate parameters of Parallel to Vertical Case ... 20
Equation 8: Calculate T , 1 T and 2 T of Parallel to Vertical Case ... 21 3 Equation 9: ECT formulation of Parallel to Vertical Case ... 22
Equation 10: ECT formulation of Vertical Case ... 24
Equation 11: ECT of Vertical Case ... 25
Equation 12: PDF of v and B ... 25
Equation 13: PDF of ... 27
Equation 14: Specific value of angle ... 29
Equation 15: Segment of v ... 31 B Equation 16: Calculate T , 1 T , 2 T and 3 T ... 34 4 Equation 17: ECT formulation of Vertical to Opposite or Parallel Case ... 35
Equation 18: Probability of MN and A MN stop per second ... 38 B Equation 19: Probability of each state happened ... 38
Equation 20: Multiple of communication time in Opposite to Vertical Case ... 38
Equation 21: Calculate ECT ... 39 TL Equation 22: Multiple of communication time in Parallel to Vertical Case ... 40
Equation 23: Multiple of communication time in Vertical to Opposite or Parallel Case ... 40
List of Table
Table 1: Simulation parameters of Opposite to Vertical Case ... 52
Table 2: Simulation parameters of Parallel to Vertical Case ... 53
Table 3: Simulation parameters of Vertical to Opposite or Parallel Case ... 55
Table 4: Simulation parameters of VANETs in urban city ... 56
Table 5: Simulation parameters of Opposite to Vertical Case with traffic light .. 59
Table 6: Simulation parameters of Parallel to Vertical Case with traffic light .... 61
Table 7: Simulation parameters of Vertical to Opposite or Parallel Case with traffic light ... 62
Chapter 1: Introduction
In this thesis, we mainly discuss the communication time analysis in Vehicular Ad Hoc Networks (VANETs) in urban city. We present a mathematical model to analyze the communication time. In the mathematical analysis model in [1], authors presented a mathematical model to analyze Expected Link Life Time (ELLT). Their mathematical analysis model can’t approach the trajectory of vehicle movement, because they assume no turn probability exists between two vehicles during their communication time. Therefore, we add the condition of turn probability to analyze communication time. Nevertheless, this problem will become more complex if we consider the turn probability of vehicles, because if vehicles can turn many times, it is difficult to analyze the communication time. Therefore, in order to simplify this problem, we assume that vehicles have one turn during their communication time at most. Furthermore, we consider adding a traffic light to each intersection to observe the influence and the difference of communication time. Then, we also present simulation results to validate our mathematical model in Expected Communication Time (ECT).
Since the recent rapid development of wireless mobile networks, people can access the network ubiquitously. Vehicular ad-hoc networks (VANETs) is an emerging new type of wireless mobile ad-hoc networks (MANETs). VANETs are distributed, self-organizing communication networks built up from traveling vehicles, and are thus characterized by very high speed and limited degrees of freedom in node movement patterns. VANETs let people acquire information of transmission and traffic situations in real time by using wireless communication and data transmission technology. Nevertheless, it influences the performance of data transportation and
routing algorithm due to connection states and route results have a prescription because the locations of vehicles change dynamically. Such particular features often make standard networking protocols inefficient or unusable in VANETs. Therefore, VANETs is a popular research field recently. VANETs have been utilized in many mobility models, like random waypoint mobility model, without restrictions on the movement and directions of vehicles as the Figure 1 indicates. However, in VANETs, the trajectory of vehicle movement is restricted by streets. So the model couldn’t reveal all trajectories of mobility nodes in VANETs. In urban city, the Manhattan mobility model is one of the typical mobility models, which has wireless nodes moving in grid topology environment, shown as Figure 2. The discussion of communication time in VANETs are not much, so the main point of this thesis lies on the mathematical analysis of the communication time of VANETs in urban city. Communication time can be utilized in many places, like in delay tolerance network[21][22], how long nodes store packets, or how the ferry[23] transfers data between wireless nodes during limited communication time. For example, in VANETs [20], if two vehicles want to transmit data, we can calculate communication time by their relative direction and speed. In this case they can estimate how much data they can transmit during the period of time, how much bandwidth they need in advance. They can enhance packet delivery ratio and the efficiency of performance of routing algorithm. Besides, [9] also points out that the communication time is a significant factor to the wireless ad hoc network’s optimal performance.
Figure 1: Random Waypoint Mobility
Model
Figure 2: Manhattan Grid Mobility
Model
In VANETs, as Figure 3 indicates, communication time represents the time needed to be within another vehicle’s transmission range and able to transmit data directly between two vehicles, while ECT means the expected value of communication time. If one vehicle moved out of the transmission area, these two vehicles couldn’t transmit data directly. Consequently, analysis of expected communication time is crucial to data transmission and routing algorithm. In [1], it addresses the mobility feature of the Manhattan mobility model in wireless ad hoc network. It assumes that mathematical analysis model didn’t consider the probability of turns meeting with the intersection, and it influences the expected communication time. In this thesis, we presented a mathematical analysis model to calculate the ECT of VANETs in urban city. We aim at [1] to improve the imperfection of this mathematical model and establish a more accurate model with turn probability to make the communication time closer to reality. It may be more sophisticated when taking the fact that vehicles can turn at intersections into consideration, though. If vehicles turn several times, the communication time will be hard to estimate. In terms of the perspective of real movement, it’s unlikely that we will have two vehicles with extortionate turns in their short communication time. To clarify this point, we use the
simulator in [24], the USC mobility generator tool is a set of mobility scenario generators, including the Random Waypoint model, the Reference Point Group Mobility model, the Freeway mobility model, and the Manhattan mobility model. The traces generated by this tool are compatible with the ns-2 simulator. We use the mobility model where nodes move haphazardly in the Manhattan mobility model. We count the number of turns wireless nodes make during their communication time. The consequence is shown in Figure 4, which indicates the average number of turns a wireless node make at one time. Therefore, to simplify the question, we assume that all vehicles will have one turn at most during their communication time. Based on this perspective, we construct a more accurate mathematic analysis model to make the consequence closer to reality. Furthermore, in urban areas, there must be traffic lights to control traffic flow. So we add a traffic light at each intersection. We assume two kinds of signals for each traffic light, red light and green light; the periods for each are the same, and each traffic light operates individually. We analyze how traffic lights influence communication time and mention a mathematical analysis model for analyzing communication time.
B A B A B A A B B A B A B A B A B A B A A B A B
Figure 3: Communication time
turn times (100 nodes avg.)
0
0.5
1
1.5
2
1
5
10
15
19
m/s
tim
es
d=125
d=166.6
d=250
Figure 4: Number of turn during communication time
In urban city, the trajectory of each vehicle is restricted in streets, thus [1] lets the connection between two mobility nodes be separated into three independent parts:
opposite case, parallel case, and vertical case. We add the turn probability where wireless nodes meet intersections to the mathematical analysis model, and we also separate the connection into three independent parts: Opposite to Vertical Case, Parallel to Vertical Case, and Vertical to Opposite or Parallel Case, shown as Figure 5. Because of the independence, we use mathematical analysis with probability to analyze each connection style. To demonstrate the consequence from the mathematical analysis, we can use NS2.
A B A B A B A B A B A B A B A B A B
Figure 5: Opposite to Vertical Case; Parallel to Vertical Case; Vertical to Opposite or Parallel case
The organization of the rest of this thesis is as follows. In Chapter 2, we discuss related works about the effect of mobility model on link dynamics characteristics and routing strategy in ad hoc networks. In Chapter 3, the formulations of the ECT of VANETs in an urban city are presented. In Chapter 4, we add traffic lights on each cross and present the formulations of the ECT of VANETs in an urban city. TL Chapter 5 shows the formulation results and the simulation results are confirmed in Chapter 6. Finally, we conclude this thesis in chapter 7.
Chapter 2: Related work
A wireless ad hoc network is composed of direct communication between wireless nodes in an environment without infrastructure. Therefore, the mobility model of nodes affects the performance of the wireless ad hoc network significantly. Among them, [2] demonstrates the characteristics and analyzes the influence among different mobility models.[3] quantified the influence for routing algorithm among different mobility models. [11] analyzed link lifetime and route lifetime in different mobility models. Therefore, we can understand that mobility models play a critical role for routing algorithm in wireless ad hoc network.
The random waypoint mobility model is the most common mobility model in wireless ad hoc network. There are many discussions and researches about it. Among them, [4][5] discuss its characteristics.[6] presents the factor that node communication is relevant and influences of connection ability and performance. Therefore, it points out the research in fields of link lifetime. [19] analyzed link durations in several different mobility scenarios to develop adaptive metrics to identify stable links in a mobile wireless networking environment. [12] analyzed the relation between the speed of wireless nodes and link failure rate. [7] investigated the expected lifetime of a route so that the route discovery protocol can be invoked at the right time without disrupting the communication. [8][9][10] formulate the expected link lifetime and demonstrate their formulations. [13] calculated the longest lifetime path to improve the routing algorithm’s performance. [14] presented a new mobility model, Semi-Markov Smooth model, and calculated link lifetime, then investigated the influence of the routing algorithm on link lifetime. [15][16][17][18] utilize the value of the expected link lifetime to apply on routing algorithm and analyze the influence.
The discussion of communication time in VANETs is not much, [25] presents a new model using real street map data gotten from the TIGER (Topologically Integrated Geographic Encoding and Referencing) database, modeling vehicles traveling on these streets, and analyzed the properties of this mobility model and studied the performance of a common ad hoc network routing protocol, DSR, on this model. [26] evaluated the sensitivity of mobility details on VANETs in an urban context and proposed three new but related vehicular mobility models– the Stop Sign Model, the Traffic Sign Model, and the Traffic Light Model. [27] introduced STRAW (Street Random Waypoint), a new mobility model for vehicular networks in which nodes move according to a simplified vehicular traffic model on roads defined by real map data, and analyzed the implications of mobility models in the performance of ad-hoc wireless routing protocols by contrasting the performance of two well-known protocols using both the commonly employed Random Waypoint Model and STRAW.
Since the quick development of networks, VANETs is one recently popular mobility model. However, there are few research and discussion of communication time, especially since the communication time significantly affects routing algorithm and performance in mobility ad hoc network. And in urban areas, we can see the Manhattan grid mobility model frequently. [2] mentioned Manhattan grid mobility model and analyzed its movement behavior. [1] formulated communication time in MANET under Manhattan grid mobility model. Therefore, it inspires our motivation to take a research in the communication time of VANETs in urban city. In this thesis, we mentioned two mathematic analysis models of communication time, one is with turn probability, and the other is with traffic light.
Chapter 3: Expected communication time in VANETs
ECT means the average time for two wireless nodes to transmit data to each other directly in all situations. In [9], it mentions that ECT has significant impact on wireless network. There are some researches on the expected link lifetime in a random waypoint mobility model. There are also some researches on the expected link lifetime in Manhattan Grid Mobility Model. For example, [2] mentioned the Manhattan grid mobility model and [1] that mentioned a mathematical model that can analyze the expected link lifetime on the Manhattan grid mobility model. However, there are few researches on VANETs in an urban city.
In this chapter, we reform the mathematical model in [1], and add the probability of turn to the mathematical model to make the consequence closer to the reality of VANETs. Furthermore, to simplify the question, we assume that two vehicles have one turn at most during communication time, and we postulate the probability of turn
turn
p when meet with the intersection.
We assume that there is a connection of two mobility nodes, MN and A MN , B in urban city, and we can separate the connection into three situations:
1. The direction of movement between MN and A MN is opposite to vertical. B 2. The direction of movement between MN and A MN is same to vertical. B 3. The direction of movement between MN and A MN is vertical to opposite or B
same.
We respectively use T
vA 、T
vA 、T||
vA to describe it. The ECT in an urban city is described as Equation 1, and we separated the paragraph to three parts to analyze the mathematical model of ECT.case
parallel
or
opposite
to
ical
under vert
of
ECT
:
)
(
case
vertical
to
parallel
under
of
ECT
:
)
(
case
vertical
to
opposite
under
of
ECT
:
)
(
of
ECT
:
)
(
:
is
of
speed
When the
)
(
2
1
)
(
4
1
)
(
4
1
)
(
|| || A A A A A A A A link A A A A A A linkMN
v
T
MN
v
T
MN
v
T
MN
v
T
v
MN
v
T
v
T
v
T
v
T
Equation 1: ECT of VANETs in urban city
Before discussing ECT, we have some basic assumptions:
1. The transmission range of every node is a circle with radius R.
2. The average moving speed of every node is distributed between maximum vmax and minimum vmin equally.
3. The moving direction of every node—moving upward, downward, leftward or rightward—has the same probability.
4. MN has one turn at most during communication time with B MN , and the A probability of turning when meeting the cross is pturn.
3.1 Opposite to Vertical Case
In the opposite to vertical case, the relative direction between mobility nodes,
A
MN and MN , is opposite. When B MN meets the cross, it has probability of turn B
turn
p and lets the relative direction become vertical. In Figure 6 and Figure 7, the dotted lines represent streets. The definitions of symbols are represented as follow: 1. v :speed of A MN A
2. v :speed of B MN B 3. I:horizontal street 4. J:vertical street
5. d:distance between adjacent street
6. s :distance from MN enters range of B MN to A MN meets first cross B
Among them, to take care more when MN enters the range of B MN , since A the location of MN will change within a fixed range. As Figure 8 indicates, we can A see the value of s will vary with the varying location of MN . It also means the A distance where MN meets the first cross after entering the range of B MN will A vary, and furthermore ECT will also vary. Consequently, we calculate the communication time formed by each location of MN and A MN , sum up the total B amount, and average it. In Figure 8, we set the standard value of s when MN B enters the range of MN and A MN is on cross at the same time. We assume the A coordinate of MN is A (0,0) and the distance from MN enter range of B MN A through i street to th MN meet first cross is B S . i
v
B Ov
AS
d
2
i
1
i
L
1
j
j
2
j
3
R
3
i
v
B Ov
AS
d
2
i
1
i
L
1
j
j
2
j
3
R
3
i
v
B2
i
1
i
1
j
j
2
j
3
1T
2T
3T
1T
2T
3
i
O
v
Av
B2
i
1
i
1
j
j
2
j
3
1T
2T
3T
1T
2T
3
i
O
v
AFigure 7: Opposite to Vertical Case with turn probability pturn
)
0
,
0
(
O
1S
s
2
i
1
i
1
j
j
2
j
3
3
i
)
0
,
(
S
1d
O
O
(
S
1,
0
)
0
s
d
s
Av
Bv
)
0
,
0
(
O
1S
s
2
i
1
i
1
j
j
2
j
3
3
i
)
0
,
(
S
1d
O
O
(
S
1,
0
)
0
s
d
s
Av
Bv
Figure 8: Relation of s and location of MN A
As Equation 2 indicates, we calculate the parameters completely in Figure 6 before calculating ECT.
1
2
2 2
d
S
L
C
d
d
L
L
S
d
i
d
R
R
L
i i i i i i iEquation 2: Calculate parameters of Opposite to Vertical Case
i
C represents the maximum count of crosses that MN on number B i street passed through during communication time. The maximum value means that MN B may be unable to reach some crosses during the communication time if v is smaller B than v . Therefore, we define a new parameter A vB i,j further, see Equation 3,
representing the minimum speed MN that can reach number B ( ji, ) cross. We separate this case into two parts, one is that MN can reach all crosses and has a B probability of turning, the other is that MN can’t reach some crosses. B
, min ,1
2
1
B j i B A i i i j i Bv
v
v
d
j
s
L
d
j
s
v
Equation 3: Minimum speed that v can reach number j cross B
Consequently, we calculate T , 1 T , and 2 T in Figure 7 respectively. 3 T 1 represents the communication time from when MN enter range of B MN to when A
B
MN meets a cross. T represents the communication time from when 1 MN turn B at cross to when MN leave range of B MN . A T represents the communication 3 time that MN moves straight during B MN and A MN connect. It includes two B parts, one part is the situation that MN can’t reach some crosses, for example, B
B
MN can reach cross number j but can’t reach cross number j1. The other part is that MN can reach each cross but B MN keeps straight when meeting crosses, B therefore we use the remainder probability to calculate ECT after subtracting the probability of turning.
We use coordinate to calculate T , shown by Figure 8. The location of 2 MN A varies when MN contacts with B MN , therefore we list the coordinate range of s A and MN as follow. A
1. s :0sd
2. MN :A
Si d,0
MNA
Si,0We calculate the coordinate of MN and A MN when B MN is at cross B respectively, then we assume MN will leave the range of B MN through A T after 2 turning. Since we know the directions of MN and A MN , we can calculate the B coordinates of MN and A MN after B T . At this time, the distance of two mobility 2 nodes is R . Consequently we can get T through solving the equation as Equation 4 2 indicates.
B A B A i i B B A i i B Bv
v
L
T
T
get
eqation
this
Solve
R
T
v
d
i
d
R
v
T
T
s
S
d
C
j
up
to
turn
MN
R
T
v
d
i
d
R
v
T
T
s
S
d
C
j
down
to
turn
MN
v
d
j
s
T
2
,
2
2
1
3 2 2 2 2 2 2 1 2 2 2 2 2 1 1Equation 4: Calculate T , 1 T and 2 T of Opposite to Vertical Case 3
We need to get distribution probability of the variable parameters to calculate the expected value. Because v distributes between B vmax and vmin equally, and s also distributes among varying range equally, so we can get their PDF simply shown as Equation 5:
s
of
1
1
min maxrange
s
f
v
v
v
f
B
Equation 5: PDF of v and B sFinally, we calculate the average communication time of two mobility nodes which can transfer data directly in all possible, shown as Equation 6. Separating it into three parts, we calculate the first part: the communication time for MN meeting B one cross and turning, same as T1T2. We calculate T1 T2 of each cross
respectively, because MN can meet B C crosses at most. Furthermore, there are i
many different way for MN to enter the range of B MN , for example that A MN B may enter the range of MN from the A i street or the th i 1 th street. Finally we get
the sum of all situation and average. Then we calculate the second part:part of MN B can’t reach some cross, means MN may can reach some streets but can’t reach the B
next street, for example that MN can reach street B j but can’t reach street th j 1 th street. The third part:MN can run through B C crosses during communication time, i
we calculate the communication time by remainder probability, contracted probability of turn first, means probability of going straight. In the end, we sum the three parts above to get the ECT of opposite to vertical case. Among them, is the extreme minimum value to avoid some problems in mathematics like dividing by zero when
B
1
0, 0 1 2 2 , 1 2 1 , 2 1 , 1 2 2 1 1 2 1 , ... 1 , 1 ... 1 1 , 1 , ... 2 2 , 1 1 , , , 3 0 3 0 1 1 3 2 1 max , , 1 , max ,
T p if d R I i p otherwise d R d R i p d R i if p C p C if ds s f p C dv v f T I i p ds s f p j dv v f T p dv v f T T I i p p d R i p C j d R i v t E p i p C j i v t E p i p j i v t E d R i p d R i j v t E i p i j v t E i p i j v t E j i v t E V T turn turn i turn i d s turn i B B v v d s d R I C J v v turn B B turn B B v v turn i B turn i B turn B B B B B A B i C i B i Bij j i B B j i B Equation 6: ECT formulation of Opposite to Vertical Case
3.2 Parallel to Vertical case
In parallel to vertical case, the relative direction between mobility nodes, MN A and MN , is parallel. When B MN meets a cross, it has probability of turning B pturn
and lets the relative direction become vertical. As Figure 9 shows, the dotted lines represent streets. We separate the communication time into two parts, shown as Figure 10, the first part is MN keeping up with B MN when A vB vA, then MN B
connects with MN when A MN enters the range of B MN . Second part is on the A contrary. We aim at the first part to discuss as following because two parts are the same.
v
B2
i
1
i
1
j
j
2
j
3
1T
2T
3T
1T
2T
v
AO
3
i
v
B2
i
1
i
1
j
j
2
j
3
1T
2T
3T
1T
2T
v
AO
3
i
Figure 9: Parallel to vertical with turn probability pturn
2
i
v
Bv
A 1S
d
1
i
1L
3
j
j
2
j
1
A BV
V
A BV
V
3
i
v
BR
2S
i
2
v
Bv
A 1S
d
1
i
1L
3
j
j
2
j
1
A BV
V
A BV
V
3
i
v
BR
2S
Figure 10: Parallel case of VANETs in urban city
In this case, same as the Opposite to Vertical Case, the location of MN will A vary in fixed range when MN enters range of B MN , as Figure 11 indicates. A Communication time also varies, therefore we calculate each communication time formed by each location of MN and A MN , sum up total amount and average it B same as opposite to vertical case. In Figure 11, we set the standard value of s when
B
MN enter range of MN and A MN is on cross (blue part) at the same time. We A assume the coordinate of MN is A (0,0) and the distance from MN enter range B of MN through A i street to MN meet first cross is B S . i
)
0
,
0
(
O
1S
s
2
i
1
i
3
j
j
2
j
1
3
i
)
0
,
(
S
1O
O
(
d
S
1,
0
)
d
s
0
s
Av
O
(
0
,
0
)
v
B 1S
s
2
i
1
i
3
j
j
2
j
1
3
i
)
0
,
(
S
1O
O
(
d
S
1,
0
)
d
s
0
s
Av
v
BFigure 11: Relation of s and location of MN A
As Equation 7 indicates, we calculate parameters completely in Figure 10 before calculating ECT.
1 2 2 2 d S v v v L C d d L L S d i d R R L i B A B i i i i i i
Equation 7: Calculate parameters of Parallel to Vertical Case
i
C represents the maximum value of crosses MN can meet in the B i street. th It is different from the C of opposite to vertical case, because i C in this case i
guarantees the number of crosses that MN can reach. In other words, B MN B certainly can reach C crosses in the range of i MN , besides the factor that A MN B
may turn. The situation that v is too small to reach some cross for B MN in range B of MN will not occur because A vBvA.
Consequently, we calculate T , 1 T and 2 T respectively shown as Figure 9. 3 T 1 represents the communication time from when MN enters the range of B MN to A meet the cross. T represents the communication time from 2 MN turns at the cross B to leave the range of MN . A T represents the communication time that 3 MN B moves straight during MN is connecting with B MN . In other words, A MN can B reach each cross but MN keep straight when meeting crosses, therefore we use the B remainder probability to calculate ECT after subtracting probability of turn. We use coordinates to calculate T , shown as Figure 9. The location of 2 MN varies when A
B
MN contacts with MN , therefore we list the coordinate range of s and A MN A as follow.
2. MN :A
Si d,0
MNA
Si,0We calculate the coordinate of MN and A MN when B MN is at cross B respectively, then we assume MN will leave the range of B MN through A T after 2 turning. Because knowing the direction of MN and A MN , we can calculate the B coordinate of MN and A MN after B T . At this time, the distance of two mobility 2 nodes is R . Consequently we can get T through solve the equation as Equation 8 2 indicates.
B A i B A i i B B A i i B B i v v L T T get eqation this Solve R T v d i d R v T T s S d C j up to turn MN R T v d i d R v T T s S d C j down to turn MN v d j C s T 2 , 2 2 3 2 2 2 2 2 2 1 2 2 2 2 2 1 1Equation 8: Calculate T , 1 T and 2 T of Parallel to Vertical Case 3
Finally, we calculate the average communication time of two mobility nodes which can transfer data directly in all possible, shown as Equation 9. Separating it into two parts, we calculate the first part: the communication time for MN meeting B one cross and turning, same as T1T2. We calculate T1 T2 of each cross
respectively, because MN can meet B C crosses at most. If we calculate the part of i A
B v
v ,v will vary between B vA and vmax. There are many different way for
B
MN to enter range of MN , for example that A MN may enter range of B MN A from number i street or number i1 street. Therefore, we sum of all situations and average to get ECT. And second part:T , we calculate the situation that 3 MN goes B
straight during connecting.
1 2
0, 0 1 2 2 , 1 2 1 , 2 1 , 1 2 2 1 , ... 1 , 1 ... 1 1 , 1 , ... 2 2 , 1 1 , , , 3 1 0 3 1 0 2 1 max max
T p if d R p otherwise d R p d R i if p C p C if ds dv s f v f p C T ds dv s f v f p T T I i p p d R i p C j d R i v t E p i p C j i v t E p i p j i v t E d R i p d R i j v t E i p i j v t E i p i j v t E j i v t E V T V T turn i i turn i turn i d R i d s v v B B turn i C j d s B B turn v v turn i B turn i B turn B B B B B A A B A i B A 3.3 Vertical to Opposite or Parallel case
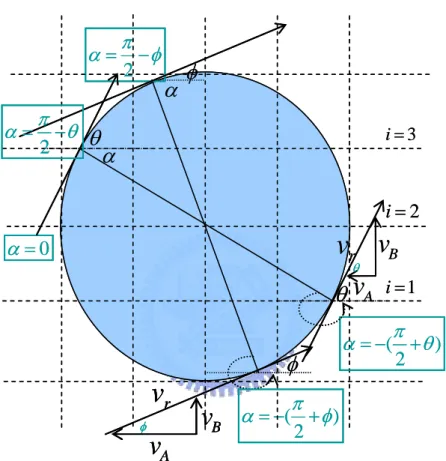
In vertical to opposite or parallel case, the relative direction between mobility nodes, MN and A MN , is vertical. When B MN meets a cross, it has probability of B turning pturn and lets the relative direction become opposite or parallel. As Figure 12
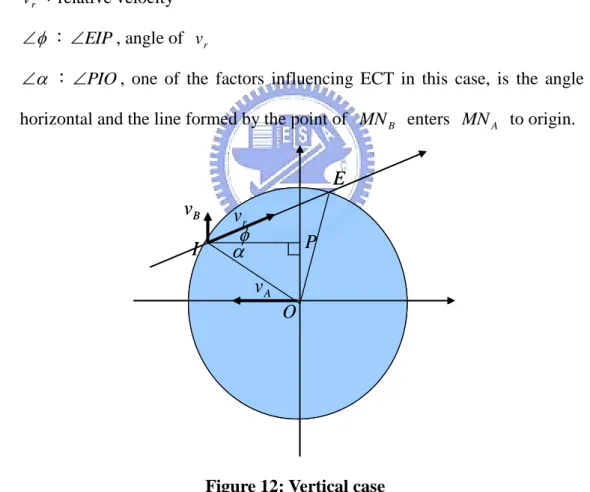
indicates relative velocity of v and A v , and some parameters we define as B following:
1. v :relative velocity r 2. : EIP , angle of v r
3. :PIO, one of the factors influencing ECT in this case, is the angle of horizontal and the line formed by the point of MN enters B MN to origin. A
I A v E P O B v r v
I A v E P O B v r v
Figure 12: Vertical case
We reuse the partial method to calculate the ECT of vertical to opposite or parallel case in [1], for example we reuse the angle representation to calculate the communication time. Therefore, we repeat how we get as following
segment. [1] explained ECT can be formulated as Equation 10 if MN goes straight B in range of MN . A
B
B v v B B B A dv d v f v t v t E v t E v T B B
, , , , , max min 2 2
Equation 10: ECT formulation of Vertical Case
We define mathematic symbol in Equation 11 as follow:
1. t
vB,
:The period of MN in range of B MN , communication time, as A equation shows.2. f
vB,
:PDF of v and B , as Equation 12 indicates, separated into two part, see Equation 5 and Equation 13. We explain process to get PDF of in Equation 13 as follow segment.3.
2 :Maximum value of , it also means MN will have no connection B
with MN if the A of MN enters the range of B MN bigger than maximum A value.
4.
2 : Minimum value of , it also means MN will have no B
connection with MN if the A of MN enters the range of B MN smaller than A minimum value.
,
sin
cos
2
cos
2
,
,
2 2 B B A B A r Bv
t
v
v
v
v
R
v
R
v
t
Equation 11: ECT of Vertical Case
v
B
f
v
v
B
f
v
Bf
B|
,
|
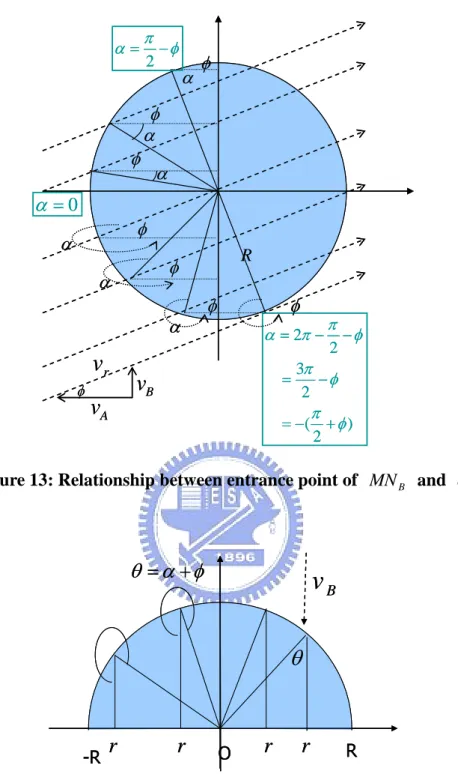
Equation 12: PDF of v and B BMN can enter range of MN from the underside of A MN .the period from A when MN enters the range of B MN to when it leaves is the communication time A we want to analyze. Nevertheless, different causes different communication time, so we need to calculate the communication time in all possible entrance angles, multiply its corresponding PDF of v and B respectively to get ECT. Therefore, we analyze angle first to get PDF of , called f
. Figure 13 indicates the relation of and entrance point of MN , and the range of B between
2
and
2 . We can observe the distance between entrance point for maximum and minimum is 2 , so we can express the relation of R and r as Figure 14 shows. We can calculate CDF of f
first then differentiate it to get PDF of . Equation 13 shows process of demonstrate step by step. 2 0
) 2 ( 2 3 2 2 Bv
Av
rv
R 2 0
) 2 ( 2 3 2 2 Bv
Av
rv
RFigure 13: Relationship between entrance point of MN and B
-R O R Bv
r
r
r
r
-R O R Bv
r
r
r
r
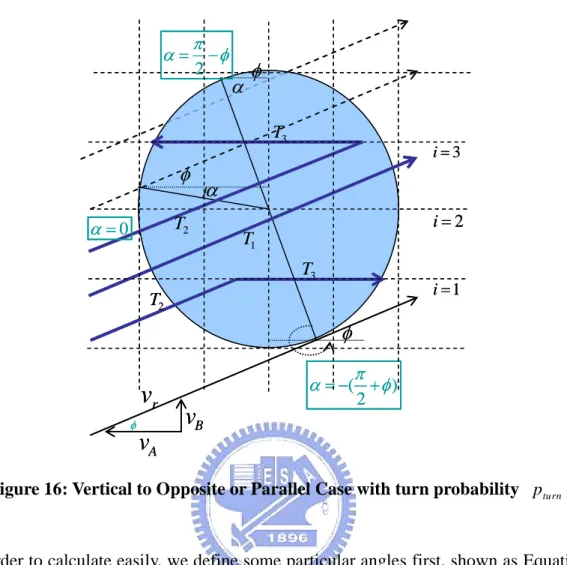
2 , 2 , 2 cos 2 1 2 sin 2 , 2 , 2 1 2 sin 2 2 1 | | | R R d d f R R R r dr R v f B B v r R r R B v Equation 13: PDF of In this thesis, MN turns with probability B pturn when meeting a cross and lets the direction become opposite or parallel, as Figure 15 and Figure 16 indicate. A dotted arrow represents relative direction of MN and A MN . We divide it into two B parts to calculate: one is that MN can’t reach some crosses and the other is that B
B
MN can reach some crosses.
v
Bv
AS
d2
i
1
i
L
1
j
j
2
j
3
O R3
i
v
Bv
AS
d2
i
1
i
L
1
j
j
2
j
3
O R3
i
2 ) 2 (
v
B Av
rv
1 i 2 i 3 i 3 T 2 T 1 T 2 T 3 T 0 2 ) 2 ( v
B Av
rv
1 i 2 i 3 i 3 T 2 T 1 T 2 T 3 T 0 Figure 16: Vertical to Opposite or Parallel Case with turn probability pturn
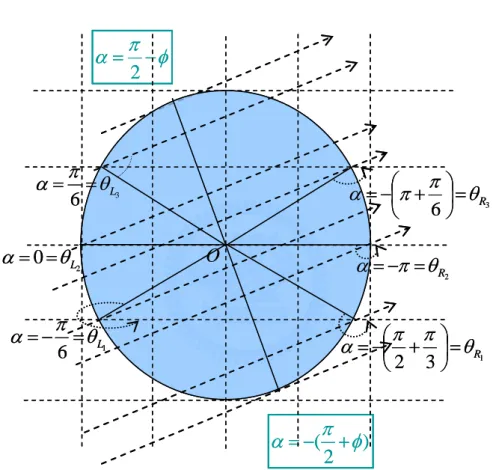
In order to calculate easily, we define some particular angles first, shown as Equation 14, see the definition of symbols as follow. Ri and Li can be referred to Figure 17,
Hi
can be referred to Figure 18.
1. Ri: for intersect of number i street and right boundary of MN . A 2. Li: for intersect of number i street and left boundary of MN . A
3. Hi:Critical angle that MN can reach number B i street, means th MN B exactly touches i street on boundary of th MN when A MN is leaving B MN A
if MN enter range of B MN from angle A . For example, if entrance angle
is smaller than this critical angle, MN can’t reach B i street, on th the