球形齒輪之數學模式及接觸分析
113
0
0
全文
(2) 球形齒輪之數學模式及接觸分析 Mathematical Model and Contact Analysis of Spherical Gears. 研 究 生:趙立碁. Student:Li-Chi Zhao. 指導教授:蔡忠杓. Advisor:Chung-Biau Tsay. 國 立 交 通 大 學 機 械 工 程 學 系 碩 士 論 文. A Thesis Submitted to Department of Mechanical Engineering College of Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master In. Mechanical Engineering June 2005 Hsinchu, Taiwan, Republic of China. 中華民國九十四年六月.
(3) 球形齒輪之數學模式及接觸分析. 研究生:趙立碁. 指導教授:蔡忠杓 博士. 國立交通大學機械工程學系碩士班. 摘要 球形齒輪有可容許垂直軸向裝配誤差之特性,其特性類似圓錐形齒 輪,許多學者已進行圓錐形齒輪之研究,且有不錯之成果。而雖然球形齒 輪之實際加工技術在很早的時候已經被發展出來,但有關球形齒輪的研究 則尚未開始著手進行,因此,若能建立出球形齒輪的數學模式,則可利用 此數學模式來進行球形齒輪之相關分析,更進一步了解球形齒輪的特性及 應用上之限制。 本論文依據齒輪原理與創成機構推導出凸狀球形齒輪及凹狀球形齒輪 之齒形數學模式,並利用所建立之球形齒輪數學模式進行電腦模擬,其中 包括:球形齒輪之齒面過切分析、接觸分析及齒印分析。齒面過切分析主 要探討球形齒輪之齒面過切位置及過切發生的球形角,接觸分析則討論球 形齒輪分別在具有裝配誤差及理想狀況時之運動誤差及接觸點位置,另 外,齒印分析探討球形齒輪在受力變形後其接觸橢圓之位置及大小。. i.
(4) Mathematical Model and Contact Analysis of Spherical Gears Student:Li-Chi Zhao. Advisor:Dr. Chung-Biau Tsay. Department of Mechanical Engineering National Chiao Tung University Abstract The spherical gears have a characteristic what can tolerate the perpendicular axes misalignment. It’s like the bevel gears. There were many scholars haven proceeded some studies and built some good results. Although the techniques of manufacture the spherical gears had been developed. But the research do not proceed about the spherical gears. Therefore, if we can build the mathematical model of spherical gears then we can start some analysis about spherical gears. For this reason, we can understand some characteristics and limit of used about spherical gears further. In this thesis, we will according to the theory of gears and the mechanism of cutting to develop the mathematical model of spherical gears. Then, we will follow this mathematical model of spherical gears to proceed the computer analysis. Those are about: undercutting analysis of spherical gears, teeth contact analysis (TCA) and contact pattern analysis of spherical gears. The undercutting analysis probe the position of undercutting line and the spherical angle of spherical gears. Teeth contact analysis probe the kinematic error and the position of contact point of spherical gears with misalignment and ideal case. Another contact pattern analysis probe the positions and size of contact pattern of spherical gears.. ii.
(5) 誌謝 本論文的製作與完成首先要感謝指導教授. 蔡忠杓博士兩年來在生活. 上、課業上、論文的指導上細心的指導,使學生在齒輪的基本觀念上有充 實的收穫。另外,蔡老師待人處世的成功更是值得學習的地方。同時也要 感謝虎尾科技大學指導教授. 張信良博士在論文上及生活上的指引與關心. ,使學生在製作論文上有正確的方向。 同時,感謝清華大學宋震國博士、吳隆庸博士及蕭德瑛博士撥冗前來 擔任口試委員,並提出指正與建議,使本論文更加完美。 另外,亦感謝瑞堂學長、冠宇學長,明達同學、志榮同學及俊諭學弟、 政豪學弟在論文上的建議、課業上的幫助及生活中的恩惠,使自己有相當 充實的研究所生活。尚要感謝社團朋友、五專同學及室友給我相當大的勉 勵,使自己在遭遇困難時有紓解壓力的空間,方有今日完備的論文。 最後感謝家人對我修習研究所的支持與鼓勵,讓我能夠更專心地面對 研究所生活的挑戰。. iii.
(6) 目錄 中文摘要 ................................................................................................................ i 英文摘要 ............................................................................................................... ii 誌謝 ......................................................................................................................iii 目錄 ...................................................................................................................... iv 圖目錄 .................................................................................................................. vi 表目錄 ................................................................................................................viii 符號表 .................................................................................................................. xi 第一章 緒論 ......................................................................................................... 1 1.1 簡介 ......................................................................................................... 1 1.2 文獻回顧 ................................................................................................. 1 1.3 研究內容 ................................................................................................. 4 第二章 基本理論................................................................................................. 5 2.1 位置向量轉換 ......................................................................................... 5 2.2 嚙合方程式 ............................................................................................. 7 2.3 相對運動速度 ......................................................................................... 7 第三章 球形齒輪之齒面數學模式................................................................... 13 3.1 前言 ....................................................................................................... 13 3.2 球形齒輪之創成原理與創成方式....................................................... 13 3.3 假想齒條刀之刀面方程式................................................................... 13 3.4 球形齒輪之嚙合方程式 ....................................................................... 19 3.5 球形齒輪之齒面方程式 ....................................................................... 23 3.6 球形齒輪之電腦輔助繪圖................................................................... 25 3.7 球形齒輪之過切分析 ........................................................................... 25 iv.
(7) 3.7.1 過切條件 ..................................................................................... 25 3.7.2 例題與討論 ................................................................................. 31 3.8 小論 ....................................................................................................... 35 第四章 球形齒輪之接觸分析........................................................................... 36 4.1 前言 ....................................................................................................... 36 4.2 球形齒輪之接觸分析數學模式........................................................... 36 4.3 球形齒輪之運動誤差分析模式........................................................... 40 4.4 球形齒輪之接觸比 ............................................................................... 42 4.5 例題討論 ............................................................................................... 43 4.6 小論 ....................................................................................................... 77 第五章 球形齒輪之接觸齒印........................................................................... 79 5.1 前言 ....................................................................................................... 79 5.2 齒面外形法 ........................................................................................... 79 5.3 接觸齒印 ............................................................................................... 84 5.4 小論 ....................................................................................................... 94 第六章 結論及未來展望................................................................................... 95 6.1 結論 ....................................................................................................... 95 6.2 未來展望 ................................................................................................ 96 參考文獻 ............................................................................................................. 97. v.
(8) 圖目錄 圖 1.1 各種球形齒輪配對形況示意圖[1] .......................................................... 2 圖 1.2 球形齒輪考慮軸角變化時之裝配示意圖[1] .......................................... 2 圖 1.3 以球形齒輪及內齒齒輪作聯軸器示意圖[1] .......................................... 3 圖 1.4 引擎軸與螺旋槳軸之連接[1] .................................................................. 3 圖 2.1 位置向量與座標關係示意圖................................................................... 6 圖 2.2 空間中兩互相嚙合運動曲面之關係示意圖........................................... 8 圖 2.3 空間物體之相對速度示意圖................................................................... 9 圖 2.4 平行軸共軛運動關係示意圖................................................................. 11 圖 3.1 球形齒輪外形示意圖............................................................................. 14 圖 3.2 假想齒條刀與被創成齒輪之座標關係示意圖..................................... 15 圖 3.3 齒條刀之法向剖面示意圖..................................................................... 17 圖 3.4 假想齒條刀刀面之座標關係示意圖..................................................... 18 圖 3.5 假想齒條刀與小齒輪相對運動關係示意圖......................................... 21 圖 3.6 假想齒條刀與大齒輪相對運動關係示意圖......................................... 22 圖 3.7 凸狀球形齒輪之電腦繪圖..................................................................... 26 圖 3.8 凹狀球形齒輪之電腦繪圖..................................................................... 27 圖 3.9 壓力角 20°及球形角 20°時之凸狀球形齒輪之過切線位置 ............... 32 圖 3.10 壓力角 14.5°及球形角 20°時之凸狀球形齒輪之過切線位置 .......... 32 圖 3.11 不同截面處凸狀球形齒輪(壓力角=20.0°)之過切情形..................... 34 圖 3.12 壓力角 14.5°及球形角 20°時之凹狀球形齒輪之過切線位置 .......... 34 圖 4.1 球形齒輪組組裝誤差關係圖................................................................. 37 圖 4.2 兩齒輪嚙合時之齒面關係圖................................................................. 41 圖 4.3 具水平軸向裝配誤差 Δγ h = 0.5 o 時球形齒輪對之運動誤差(1) ............ 51 vi.
(9) 圖 4.4 具垂直軸向裝配誤差 Δγ v = 2.0 o 時球形齒輪對之運動誤差(1) ............ 51 圖 4.5 具水平軸向裝配誤差 Δγ h = 0.5 o 時球形齒輪對之運動誤差(2) ............ 56 圖 4.6 具垂直軸向裝配誤差 Δγ v = 2.0 o 時球形齒輪對之運動誤差(2) ............ 56 圖 4.7 具水平軸向裝配誤差 Δγ h = 0.5 o 時球形齒輪對之運動誤差(3) ............ 60 圖 4.8 具水平軸向裝配誤差 Δγ h = 0.5 o 時球形齒輪對之運動誤差(3) ............ 61 圖 4.9 具垂直軸向裝配誤差 Δγ v = 2.0 o 及水平軸向裝配誤差 Δγ h = 0.5o 下球形 齒輪組之運動誤差(1) ....................................................................................... 63 圖 4.10 具垂直軸向裝配誤差 Δγ v = 2.0 o 及水平軸向裝配誤差 Δγ h = 0.5o 下球形 齒輪組之運動誤差(3) ....................................................................................... 66 圖 4.11 具垂直軸向裝配誤差 Δγ v = 2.0 o 及水平軸向裝配誤差 Δγ h = 0.5o 下球形 齒輪對之運動誤差(3) ....................................................................................... 68 圖 4.12 具垂直軸向裝配誤差 Δγ v = 2.0 o 、水平軸向裝配誤差 Δγ h = 0.5o 及中心 距誤差 ΔC = 1.0mm 下球形齒輪組之運動誤差(1) ............................................ 71 圖 4.13 具垂直軸向裝配誤差 Δγ v = 2.0 o 、水平軸向裝配誤差 Δγ h = 0.5o 及中心 距誤差 ΔC = 1.0mm 下球形齒輪組之運動誤差(2) ............................................ 73 圖 4.14 具垂直軸向裝配誤差 Δγ v = 2.0 o 、水平軸向裝配誤差 Δγ h = 0.5o 及中心 距誤差 ΔC = 1.0mm 下球形齒輪組之運動誤差(3) ............................................ 76 圖 5.1 嚙合齒面與其切平面關係圖................................................................. 81 圖 5.2 接觸點與其切平面座標關係圖............................................................. 82 圖 5.3 凸狀球形齒輪配對凸狀球形齒輪在各種裝配狀況下之齒印分佈 .... 87 圖 5.4 凸狀球形齒輪配對凹狀球形齒輪在各種裝配狀況下之齒印分佈 .... 89 圖 5.5 凸狀球形齒輪配對正齒輪在各種裝配狀況下之齒印分佈 ................ 91. vii.
(10) 表目錄 表 3.1 球形齒輪之主要設計參數..................................................................... 25 表 3.2 球形齒輪之設計參數............................................................................. 31 表 3.3 不同齒輪參數下球形齒輪發生齒面過切之球形角及對應之Z截面的 數值 .................................................................................................................... 35 表 4.1 球形齒輪之主要設計參數(1) ................................................................ 43 表 4.2 凸狀球形齒輪配對凸狀球形齒輪在理想裝配條件下之運動誤差 .... 44 表 4.3 凸狀球形齒輪配對凹狀球形齒輪在理想裝配條件下之運動誤差 .... 45 表 4.4 凸狀球形齒輪配對正齒輪在理想裝配條件下之運動誤差 ................ 45 表 4.5 具中心距誤組裝差下球形齒輪組之運動誤差..................................... 46 表 4.6 球形齒輪之主要設計參數(2) ................................................................ 47 表 4.7 具水平軸向裝配誤差下球形齒輪之運動誤差(1)................................ 48 表 4.8 具水平軸向裝配誤差下球形齒輪之運動誤差(2)................................ 48 表 4.9 具水平軸向裝配誤差下球形齒輪之運動誤差(3)................................ 49 表 4.10 具垂直軸向裝配誤差下球形齒輪之運動誤差(1).............................. 49 表 4.11 具垂直軸向裝配誤差下球形齒輪之運動誤差(2) .............................. 50 表 4.12 具垂直軸向裝配誤差下球形齒輪之運動誤差(3).............................. 50 表 4.13 球形齒輪之主要設計參數(3) .............................................................. 52 表 4.14 具水平軸向裝配誤差下球形齒輪之運動誤差(4).............................. 53 表 4.15 具水平軸向裝配誤差下球形齒輪之運動誤差(5).............................. 53 表 4.16 具水平軸向裝配誤差下球形齒輪之運動誤差(6).............................. 54 表 4.17 具垂直軸向裝配誤差下球形齒輪之運動誤差(4).............................. 54 表 4.18 具垂直軸向裝配誤差下球形齒輪之運動誤差(5).............................. 55 表 4.19 具垂直軸向裝配誤差下球形齒輪之運動誤差(6).............................. 55 viii.
(11) 表 4.20 球形齒輪之主要設計參數(4) .............................................................. 57 表 4.21 具水平軸向裝配誤差下球形齒輪之運動誤差(7).............................. 57 表 4.22 具水平軸向裝配誤差下球形齒輪之運動誤差(8).............................. 58 表 4.23 具水平軸向裝配誤差下球形齒輪之運動誤差(9).............................. 58 表 4.24 具垂直軸向裝配誤差下球形齒輪之運動誤差(7).............................. 59 表 4.25 具垂直軸向裝配誤差下球形齒輪之運動誤差(8).............................. 59 表 4.26 具垂直軸向裝配誤差下球形齒輪之運動誤差(9).............................. 60 表 4.27 具水平及垂直軸向裝配誤差下球形齒輪組之運動誤差(1).............. 62 表 4.28 具水平及垂直軸向裝配誤差下球形齒輪組之運動誤差(2).............. 62 表 4.29 具水平及垂直軸向裝配誤差下球形齒輪組之運動誤差(3).............. 63 表 4.30 具水平及垂直軸向裝配誤差下球形齒輪組之運動誤差(3).............. 64 表 4.31 具水平及垂直軸向裝配誤差下球形齒輪組之運動誤差(4).............. 65 表 4.32 具水平及垂直軸向裝配誤差下球形齒輪組之運動誤差(5).............. 65 表 4.33 具水平及垂直軸向裝配誤差下球形齒輪之運動誤差(7).................. 67 表 4.34 具水平及垂直軸向裝配誤差下球形齒輪之運動誤差(8).................. 67 表 4.35 具水平及垂直軸向裝配誤差下球形齒輪之運動誤差(9).................. 68 表 4.36 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(1) ............................................................................................................................ 69 表 4.37 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(2) ............................................................................................................................ 70 表 4.38 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(3) ............................................................................................................................ 70 表 4.39 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(4) ............................................................................................................................ 72 表 4.40 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(5) ............................................................................................................................ 72 ix.
(12) 表 4.41 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(6) ............................................................................................................................ 73 表 4.42 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(7) ............................................................................................................................ 74 表 4.43 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(8) ............................................................................................................................ 75 表 4.44 具水平、垂直軸向裝配誤差與中心距誤差下球形齒輪之運動誤差(9) ............................................................................................................................ 75 表 4.45 不同壓力角下球形齒輪之接觸比(1) .................................................. 77 表 4.46 不同壓力角下球形齒輪之接觸比(2) .................................................. 77 表 5.1 球形齒輪之主要設計參數(1) ................................................................ 85 表 5.2 球形齒輪之主要設計參數(2) ................................................................ 87 表 5.3 球形齒輪之主要設計參數(3) ................................................................ 89 表 5.4 球形齒輪之主要設計參數(3) ................................................................ 92 表 5.5 凸狀球形齒輪配對凸狀球形齒輪在不同齒形壓力角下之接觸橢圓長 短軸比 ................................................................................................................ 92 表 5.6 凸狀球形齒輪配對凹狀球形齒輪在不同齒形壓力角下之接觸橢圓長 短軸比 ................................................................................................................ 93 表 5.7 凸狀球形齒輪配對正齒輪在不同齒形壓力角下之接觸橢圓長短軸比 ............................................................................................................................ 93 表 5.8 球形齒輪組在具垂直軸向裝配誤差 Δγ v = 2.0 o 及不同齒形壓力角下之 接觸橢圓長短軸比 ............................................................................................ 93. x.
(13) 符號表 a. 假想齒條刀設計參數(mm). b. 假想齒條刀設計參數(mm). lj. 假想齒條刀之齒面參數(j=F,P) (mm). ni. 齒面單位法向量(i=1,2). nj. 齒條刀面單位法向量(j= F,P). n(j)f. 單位法向量於 Sf 座標系(i=1,2). pn. 周節(mm). ri. 節圓半徑(i=1,2) (mm). B. 球形齒輪之齒厚(mm). C. 齒輪組中心距(mm). C'. 具組裝誤差之齒輪組中心距(mm). I. 共軛運動對瞬心. Lij. 投影轉換矩陣:(座標系 Sj 轉換至座標系 Si). M. 模數(mm/teeth). Mij. 座標轉換矩陣:(座標系 Sj 轉換至座標系 Si). Ni. 小、大齒輪齒面法向量(i=1,2). N (j)c. 座標系 Sc 上齒條刀刀面之法向量(j=F,P). P. 小、大齒面共同接觸點. Pn. 徑節(1/mm). R. 球形齒輪之球體半徑(mm). Ri. 球形半徑(i=1,2) (mm). Rj. 位置向量(j=1,2). R (j) a. 齒條刀刀面在座標系 S a 之位置向量(j=F,P) xi.
(14) R (j) c. 齒條刀刀面在座標系 S c 之位置向量(j=F,P). R (i)f. 位置向量於座標系 Sf (i=1,2,F). S i ( X i , Yi , Z i ). 座標系 Si (i=1,2,f,m,n,T). S a( j ) ( X a( j ) , Ya( j ) ). 座標系 Sa (j= F,P). S c( j ) ( X c( j ) , Yc( j ) , Z c( j ) ). 座標系 Sc (j= F,P). T. 小、大齒面之共同切平面. Ti. 小、大齒輪齒數(i=1,2) (齒). V. 齒條刀速度. V (ij ). 物體 i 到物體 j 之相對速度. Vr( i ). 接觸點在物體 i 上之切線速度 (i=1,F). Vtr( i ). 接觸點與物體 i 之相對速度(i=1,F). Vc( ij ). 座標系 c 上物體 i 到物體 j 之相對速度. V f( i ). 齒條刀在座標系 Sf 上之速度 (i= 1,2). V f( j ). 齒條刀在座標系 Sf 上之速度 (j= F,P). V f( ij ). 座標系 Sf 上物體 i 到物體 j 之相對速度. αn. 壓力角(度). β. 倒角角度(度). ε. 座標轉換角度(度). δ. 座標轉換角度(度). φi. 小、大齒輪之旋轉角(i=1,2) (度). φ1S. 小齒輪接觸起點之轉角(度). φ1E. 小齒輪接觸終點之轉角(度). φi'. 小、大齒輪之旋轉角(i=1,2) (度). γ. 旋轉軸交錯角(度). xii.
(15) θi. 球形角(i=1,2) (度). θ max. 最大球形角(度). θT. 齒印搜尋角度(度). ρ. 倒角半徑(mm). ωi. 小、大齒輪之角速度(i=1,2). ΔC. 中心距偏差(mm). Δφ 2. 運動誤差(弧度-秒). Δγ h. 水平軸向偏差(度). Δγ v. 垂直軸向偏差(度). ∑i. 小、大齒輪齒面(i=1,2). ∑j. 齒條刀 1 與齒條刀 2 之齒面(j=F,P). xiii.
(16) 第一章 緒論 1.1 簡介 球形齒輪之外觀形狀有如蝸桿般之凹狀與球體般之凸狀,它基本上是 正齒輪,但具有與圓錐形齒輪相同之特性。因球形齒輪之創成方式乃是齒 輪之轉位量沿著齒輪旋轉軸向作二次曲線變化,來達到其球狀之外形;其 與圓錐形齒輪最大之不同處在於,圓錐形齒輪之轉位量是考慮一次線性變 化。由於球形齒輪是將正齒輪之轉位量作二次曲線變化而加工出,正轉位 及負轉位分別可創成凹狀與凸狀球形齒輪。當球形齒輪互相嚙合時,可以 有凸狀對凸狀,凸狀對凹狀及凸狀對正齒輪三種配對方式,如圖 1.1 所示。 對正齒輪及螺旋齒輪來說,因其組裝時無法對應旋轉軸角之變化,可能會 產生在齒輪嚙合時卡死的現象;而球形齒輪在嚙合運轉時,則可對應垂直 軸向之軸角的變化,是其最大之特性,如圖 1.2 所示。 因此,利用球形齒輪可對應旋轉軸角變化之特性,將其應用在聯軸器 上,如圖 1.3 所示,或是圓錐形齒輪之使用場合,如圖 1.4 所示,是可行之 應用的方式。. 1.2 文獻回顧 過去對於球形齒輪之相關研究並不多,楊義雄[1]及山崎隆[2]提到球形 齒輪之實體已經被加工出來,但相關之研究還未進行。Yang[3,4]則於 2002 年提出雙自由度環狀漸開線球齒輪之數學模式。Chang 及 Tsay[5]於 1997 年 提出一 CNC 滾齒機之泛用數學模式,來模擬 CNC 滾齒機創成機構之相對 運 動 關 係 。 劉 家 彰 [6]則 於 2002 年 探 討 了 漸 開 線 錐 形 齒 輪 對 之 特 性 。 Litvin[7][8]針對正齒輪做了相關之探討,說明了正齒輪之過切條件及其接觸 分析。Tsay[9]與蔡忠杓等人[10]分別於 1988 年及民國 75 年探討了螺旋齒輪 之接觸情形。 1.
(17) 圖 1.1 各種球形齒輪配對形況示意圖[1]. 圖 1.2 球形齒輪考慮軸角變化時之裝配示意圖[1]. 2.
(18) 圖 1.3 以球形齒輪及內齒齒輪作聯軸器示意圖[1]. 圖 1.4 引擎軸與螺旋槳軸之連接[1]. 3.
(19) 1.3 研究內容 由於正齒輪及螺旋齒輪對於軸角變化之裝配誤差相當敏感,因此在安 裝齒輪時校正及定位則顯得相當重要,因若稍有軸角變化之情況,則齒輪 組所產生之運動誤差亦會升高,此種現象在螺旋齒輪組尤其明顯。本論文 將利用 Litvin[7][8]所發展的齒輪原理以及電腦輔助設計技術,針對球形齒 輪組,進行其齒面數學模式的建立。首先利用軌跡法求得假想齒條刀之軌 跡方程式,再利用此假想齒條刀來創成欲分析之球形齒輪。接著亦將針對 球形齒輪嚙合時,兩互相接觸齒面間的接觸情形進行研究,探究正常裝配 情形下及具有軸向裝配誤差的情形下,球形齒輪之運動特性。 以下為本論文之研究大綱: 1. 第一章:序論。主要是介紹球形齒輪特色之介紹與其他常用齒輪之缺點, 以及文獻回顧與研究內容。 2. 第二章:基本理論。介紹創成共軛運動對之基本理論,後面章節所使用 之數學基礎皆是以此基本理論為基礎。 3. 第三章:球形齒輪之齒面數學模式。利用第二章之理論基礎,建立凸狀 及凹狀球形齒輪之數學模式。並利用此數學模式分析球形齒輪之齒面過 切情形。 4. 第四章:球形齒輪之接觸分析。以球形齒輪之數學模式為基礎,建立球 形齒輪實際組裝情形之數學模式,模擬實際組裝球形齒輪組嚙合運轉時 之運動誤差。 5. 第五章:球形齒輪之接觸齒印。利用齒面外形法建立球形齒輪組嚙合時 之齒面接觸之數學模式,且進行接觸橢圓之搜尋,探討球形齒輪之接觸 橢圓之形狀及位置。 6. 第六章:結論與未來展望。. 4.
(20) 第二章 基本理論 2.1 位置向量轉換 假設空間中有二個座標系 S f ( X f , Y f , Z f ) 與 S i ( X i , Yi , Z i ) ,其座標間之關係 如圖 2.1 所示。在上述空間座標系中有一點 P,其位置向量表示於座標系 S i ( X i , Yi , Z i ) 為 R i ,如果要把 P 點之位置向量 R i 由 S i ( X i , Yi , Z i ) 座標系轉換至 S f ( X f , Y f , Z f ) 座標系來表示其位置向量 R f ,則此兩座標系間之位置向量轉. 換可用下列之齊次座標(Homongeneous Coordinates)轉換矩陣方程式表示 之: (2.1). R f = M fi R i. 其中 ⎡cos( X f , X i ) cos( X f , Yi ) cos( X f , Z i ) X (f oi ) ⎤ ⎥ ⎢ cos(Y f , X i ) cos(Y f , Yi ) cos(Y f , Z i ) Y f( oi ) ⎥ ⎢ M fi = ⎢ cos( Z f , X i ) cos( Z f , Yi ) cos( Z f , Z i ) Z (f oi ) ⎥ ⎥ ⎢ 0 0 0 1 ⎦⎥ ⎣⎢. (2.2). 上式中 cos( X f , X i ) 表示 X f 軸與 X i 軸間夾角之餘弦值,其餘依此類推; 而 X (f o ) 、 Y f( o ) 及 Z (f o ) 為 S i ( X i , Yi , Z i ) 座標系之原點 Oi 表示於 S f ( X f , Y f , Z f ) 座標系 i. i. i. 的三個座標軸的分量, M fi 則為4×4之齊次座標轉換矩陣,可將位置向量由 S i ( X i , Yi , Z i ) 座標系轉換至 S f ( X f , Y f , Z f ) 座標系。. 至於一般之速度及法線向量等之座標間的轉換,因與座標系原點無 關,所以此類向量的座標系間轉換矩陣 L fi 為3×3之矩陣,可由方程式(2.2) 之矩陣刪去最後一行及最後一列而得並表示如下: ⎡cos( X f , X i ) cos( X f , Yi ) cos( X f , Z i )⎤ ⎢ ⎥ L fi = ⎢ cos(Y f , X i ) cos(Y f , Yi ) cos(Y f , Z i ) ⎥ ⎢ cos( Z f , X i ) cos( Z f , Yi ) cos( Z f , Z i ) ⎥ ⎣ ⎦ 5. (2.3).
(21) 圖 2.1 位置向量與座標關係示意圖. 6.
(22) 2.2 嚙合方程式 當兩曲面經由直接接觸來傳遞共軛運動時,這兩個嚙合曲面必須連續 保持接觸狀態。茲考慮空間中有二個互相嚙合運動的曲面 ∑1 和 ∑ 2,如圖 2.2 所示。P 點為這兩個嚙合運動曲面 ∑1 和 ∑ 2 相切時的共切點(Common Tangent Point),同時也是這二個嚙合運動曲面的瞬時接觸點。兩個嚙合曲面在其共 切點 P 點具有共同之曲面法向量(Surface Normal Vector) N ;圖中 V (12) 則表 示曲面 ∑1 和 ∑ 2 在 P 點的相對速度。 由於兩曲面嚙合運動時,其中一個曲面與另一曲面既不分離亦不嵌入 彼此曲面內。因此,兩共軛運動曲面在其共同法向量之方向上將不存在相 對速度 V (12) ,亦即在兩曲面之共同法向量的方向上其相對速度 V (12) 為零,故 兩曲面其相對速度必定垂直於其共同法向量且落在其共同切平面 T 上 面。因此,共同法向量 N 必與相對速度 V (12) 互相垂直。 我們可從上述的現象得到結論:兩嚙合運動曲面其相對速度 V (12) 和共同 法向量 N ,在其共同接觸點 P 處必互相垂直,亦即兩者之內積為零,所以 下式亦必成立: (2.4). N • V (12) = 0. 方程式(2.4)就是齒輪原理中探討共軛運動對(Conjugate Kinematic Pair) 之嚙合運動條件的嚙合方程式(Equation of Meshing)。此嚙合方程式對於二 維曲線及三維曲面的共軛運動對均可適用。. 2.3 相對運動速度 假設空間中有兩個物體,物體1與物體2分別固聯於座標系 S1 ( X 1 , Y1 , Z1 ) 與 S 2 ( X 2 , Y2 , Z 2 ) ,如圖2.3所示。 Z1 軸與 Z 2 軸分別為物體1與物體2之旋轉軸,其. 旋轉之角速度分別為ω1與ω2, γ 為兩旋轉軸之交錯角,C為其最短距離,P 7.
(23) 圖 2.2 空間中兩互相嚙合運動曲面之關係示意圖. 8.
(24) 圖 2.3 空間物體之相對速度示意圖. 9.
(25) 點為物體1與物體2之瞬時接觸點。因此,瞬時接觸點 P 在物體1上之速度 V1 可由下式求得: (2.5). V1 = ω 1 × R 1. 其中 R 1 乃是由物體 1 旋轉軸之座標原點指向接觸點 P 之位置向量。而瞬時 接觸點 P 在物體 2 上之速度 V2 則可由下式求得: (2.6). V2 = ω 2 × R 2. 其中 R 2 乃是由物體 2 旋轉軸之座標原點指向接觸點 P 之位置向量。因此, 物體 1 與物體 2 之相對速度可求得如下: V (12) = V1 − V2 = (ω 1 × R 1 ) − (ω 2 × R 2 ) = (ω 1 − ω 2 ) × R 1 − R × ω 2. (2.7). 其中 R 乃是由物體 1 之參考座標系原點 O1 指向物體 2 之旋轉軸上任一點之 位置向量。在此推導所得之方程式(2.7)主要適用於創成刀具和被創成齒輪 的兩旋轉軸間屬於交錯軸之運動,亦即兩軸既不相交亦不平行之共軛運動 關係。 然而,當創成刀具和被創成齒輪間的運動屬於平行軸之共軛運動關係 時,則此相對速度將可以簡化成二維的情況來討論,如圖 2.4 所示,V (12) 可 以表示成:. (2.8). V (12) = ω (12) × IP. 其中 I 點為創成刀具和被創成之齒輪做共軛運動時的瞬心 (Instantaneous. Center)。 茲考慮兩嚙合曲面在嚙合狀態時之二維關係示意圖,如圖2.4所示,相 對速度 V (12) 必指向兩者之共同切線向量 Τ ,又共同切線向量 Τ 與共同法向量 N 兩者是相互垂直,兩曲面的共同接觸點 P 上的共同法向量 N 必定通過兩 10.
(26) 圖 2.4 平行軸共軛運動關係示意圖. 11.
(27) 曲面運動之瞬心 I,因此相對速度 V (12) 與 IP 互相垂直,所以下式亦必成立: X (φ) − x(θ) Y (φ) − y (θ) = N x( θ ) N y( θ). (2.9). 其中 X (φ) 及 Y (φ) 為瞬心 I 點之座標, x(θ) 及 y (θ) 是 P 點的座標,而 N x(θ) 及 N y(θ ) 則為其共同法向量在 X 軸及 Y 軸之分量。利用方程式(2.9)即可推導出. 二維共軛運動對之嚙合方程式。. 12.
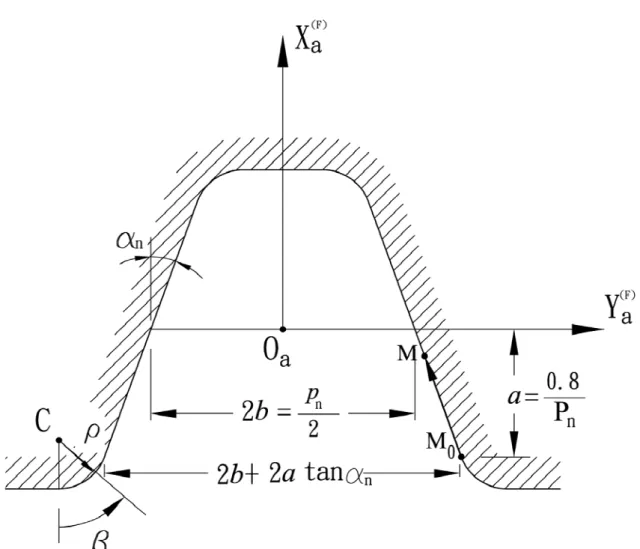
(28) 第三章 球形齒輪之齒面數學模式 3.1 前言 在本章節中,將討論球形齒輪的創成原理以及利用齒條刀創成球形齒 輪的相對運動關係,應用第二章所介紹的齒輪基本原理,首先推導齒條刀 的齒面數學模式。首先利用位置向量之座標轉換,即可求得齒條刀在被創 成之齒輪座標系的齒條刀面軌跡數學模式,接著依據齒輪嚙合原理及創成 機構中齒條刀具與被創成齒輪之間的運動關係以推導兩者間的嚙合方程 式,最後再將齒條刀在齒輪座標系的齒條刀面軌跡方程式與嚙合方程式聯 立,即為被創成的球形齒輪之齒面數學模式。. 3.2 球形齒輪之創成原理與創成方式 球體乃是由一半圓的平面繞著一個特定軸旋轉 360 度所形成的一個物 體,而其表面則是一個規則曲面(Regular Surface),其特性是在球體的中心 點到此球體表面上任何一點的距離都相同。在球體上假想出可以嚙合的 齒,並截取某一設定的球體範圍即成為本文中所探討的球形齒輪,如圖 3.1 所示。其中 R 表示球體之半徑,B 表示球形齒輪之齒厚,參數 θ 可用來決定 齒厚 B 之大小。球形齒輪與一般正齒輪最大的差異是由側面看齒輪時,球 形齒輪亦是圓形,亦即由圖 3.1(a)及(b)所示之圖形其上視圖亦為圓形。 在齒輪的製造方法中,有多種方式可用以製造所需要的齒輪,利用滾 齒機來創成齒輪即是一種常見的方法,而滾齒機亦具有生產效率高的優點。 因此,本研究係選用滾齒的創成方法做為創成球形齒輪的方式,並且利用 假想齒條刀來模擬滾削球形齒輪時滾刀之運動情形。. 3.3 假想齒條刀之刀面方程式 如圖 3.2 所示,為假想齒條刀切製齒輪時之創成機構關係示意圖,其中 13.
(29) (a)凸狀球形齒輪. (b)凹狀球形齒輪 圖 3.1 球形齒輪外形示意圖. 14.
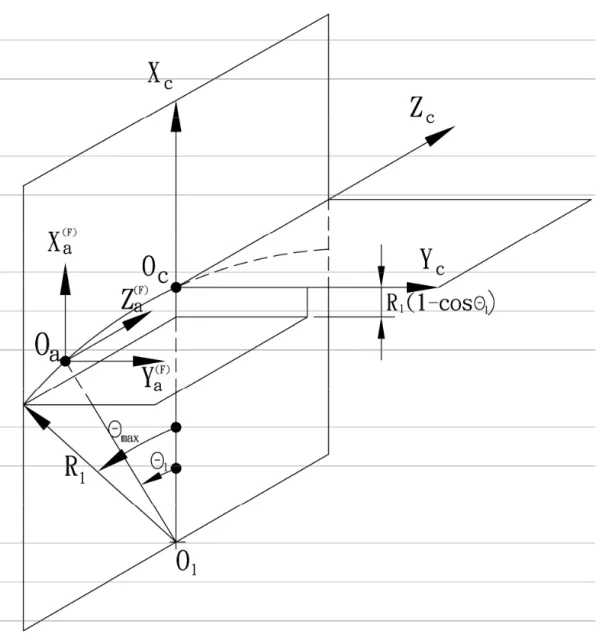
(30) 圖 3.2 假想齒條刀與被創成齒輪之座標關係示意圖. 15.
(31) 小齒輪(Gear 1)及大齒輪(Gear 2)分別以 ω1 與 ω2 的角度速旋轉,而齒條刀則 以 V 之速度做平移。若瞬軸(Axix of Rotation)I-I 分別繞著小齒輪與大齒輪 的旋轉軸轉動,即形成了小齒輪與大齒輪的瞬軸面(Axode),且當兩齒輪嚙 合運轉時,兩瞬軸面做純滾動,且在瞬軸上其相對速度為零[1]。 假設 ∑ F 與 ∑ P 分別代表齒條刀 1 與齒條刀 2,用來創成小齒輪 ∑1 與大 齒輪 ∑ 2 。圖 3.3 所示為齒條刀 ∑ F 之法向剖面,此齒條刀法向剖面之兩側為 直邊刀刃且與 X a( F ) 軸夾角為 α n ,此夾角亦為齒輪之壓力角。其中 l F 為齒條 刀具面之一個刀面參數,表示由固定點 M 0 沿著齒條刀面到動點 M 的距離, 即 l F = MM 0 為一參數。因此,齒條刀 ∑ F 其左右刀刃面之正交截面表示在 S a( F ) ( X a( F ) , Ya( F ) ) 座標系之參數方程式為:. R. (F) a. − a + l F cos α n ⎤ ⎡ ⎢ = ⎢m (b + a tan α n ) ± l F sin α n ⎥⎥ ⎥⎦ ⎢⎣ 0. (3.1). (3.1)式中正負號上方之符號表示齒條刀左刀刃面,而正負號下方之符號則 表示齒條刀右刀刃面。a 與 b 亦為齒條刀之設計參數,用來決定刀具工作區 間起點的座標位置,如圖 3.3 所示。 再考慮一輔助座標系統 S c( F ) ( X c( F ) , Yc( F ) , Z c( F ) ) ,如圖 3.4 所示,此輔助座標 系統用來表示滾削球形齒輪球面部分的軌跡,在此可將前述之齒條刀正交 截面之齒間(Space)刀面假想成球形齒輪齒形之某一截面的外形。利用齊次 座標轉換可將 ∑ F 刀具面表示在 S c( F ) ( X c( F ) , Yc( F ) , Z c( F ) ) 座標系上,其方程式為:. R (cF ) = M ca R (aF ). ⎡− a + l F cos α n − ( R1 − R1 cos θ1 )⎤ = ⎢⎢ m (b + a tan α n ) ± l F sin α n ⎥⎥ ⎥⎦ ⎢⎣ R1 sin θ1. 其中. 16. (3.2).
(32) 圖 3.3 齒條刀之法向剖面示意圖. 17.
(33) 圖 3.4 假想齒條刀刀面之座標關係示意圖. 18.
(34) M ca. ⎡1 ⎢0 =⎢ ⎢0 ⎢ ⎣0. 0 1 0 0. 0 − ( R1 − R1 cos θ1 )⎤ ⎥ 0 0 ⎥ ⎥ 1 R1 sin θ1 ⎥ 0 1 ⎦. 同理,創成大齒輪之齒條刀 ∑ P 之刀面方程式,亦可用此方法推導並表示於 S c( P ) 座標系如下: R c( P ) = M ca R (aP ). ⎡− a + l P cos α n − ( R2 − R2 cos θ 2 )⎤ = ⎢⎢ m (b + a tan α n ) ± l P sin α n ⎥⎥ ⎥⎦ ⎢⎣ R2 sin θ 2. (3.3). 3.4 球形齒輪之嚙合方程式 根據齒輪原理[7],被創成齒輪外形可由刀具在被創成的齒輪座標系上 之軌跡方程式與嚙合方程式聯立求得。由第二章的齒輪基本理論得知,必 須將齒條刀齒面與球形齒輪齒面之接觸點的相對速度 V ( F 1) 與齒條刀的齒面 法向量 N ( F ) 表示在同一座標系,由於兩者在其共同接觸點或線上係呈現互相 垂直之關係,若將此條件表示在 S c( F ) 座標系則方程式(2.4)可表示為:. (3.4). N (cF ) • Vc( F 1) = 0. 由於齒條刀之齒面為一規則曲面,因此,將齒條刀刀面之數學模式分 別對其兩個刀面參數 l F 和 θ1 取偏微分之內積,即可求出齒條刀左右之刀面 法向量如下: N (F) c =. ∂R (F) ∂R (F) c c × ∂l F ∂ θ1. (3.5). 其中 ⎡ cos α n ⎤ ∂R (F) c = ⎢⎢± sin α n ⎥⎥ ∂l F ⎢⎣ 0 ⎥⎦. (3.6). ⎡− R1 sin θ1 ⎤ ∂R (F) ⎥ c 0 = ⎢⎢ ⎥ ∂θ1 ⎢⎣ R1 cos θ1 ⎥⎦. (3.7). 19.
(35) 將方程式(3.6)與(3.7)代入方程式(3.5)化簡後得: N. (F ) c. ⎡ ± sin α n cos θ1 ⎤ = R1 ⎢⎢− cos α n cos θ1 ⎥⎥ ⎢⎣ ± sin α n sin θ1 ⎥⎦. (3.8). 同理,假想齒條刀 ∑ P 左右邊刀面之法向量亦可依照前述之方式求出如下: N. ( P) c. ⎡ ± sin α n cos θ 2 ⎤ = R2 ⎢⎢− cos α n cos θ 2 ⎥⎥ ⎢⎣ ± sin α n sin θ 2 ⎥⎦. (3.9). 至於齒條刀與被創成之小齒輪之間的相對速度,可依據圖 3.5 所示之相 對速度關係示意圖求得。因齒條刀在小齒輪之瞬軸面上方向左平移,齒條 刀面上與齒輪之接觸點的速度,表示在 S f 座標系為: V. (F ) f. ⎡ 0 ⎤ = ⎢⎢− ω1 r1 ⎥⎥ ⎢⎣ 0 ⎥⎦. (3.10). 被切製小齒輪上與齒條刀相對應之接觸點的速度表示於 S f 座標系則為: V f(1) = ω1 × R c( F ). ⎡ (Yc( F ) − r1φ1 )ω1 ⎤ ⎢ ⎥ + Oc( F ) O f × ω1 = ⎢− ( X c( F ) + r1 )ω1 ⎥ ⎢ ⎥ 0 ⎣ ⎦. (3.11). 將方程式(3.10)與(3.11)相減,即可求出齒條刀左右齒面與小齒輪運動時 之相對速度,如下: V f( F 1). ⎡(r1φ1 − Yc( F ) )ω1 ⎤ ⎢ ⎥ X c( F ) ω1 =⎢ ⎥ ⎢ ⎥ 0 ⎣ ⎦. (3.12). 其中 X c( F ) = −a sin α n + l F cos α n − ( R1 − R1 cos θ1 ) Yc( F ) = (b + a tan α n ) − l F sin α n. 同理,假想齒條刀 ∑ P 其左右齒面與大齒輪之相對速度,亦可依據圖 3.6 所示之創成機構運動關係示意圖推導求得,因此假想齒條刀 ∑ P 左右齒面與. 20.
(36) 圖 3.5 假想齒條刀與小齒輪相對運動關係示意圖. 21.
(37) 圖 3.6 假想齒條刀與大齒輪相對運動關係示意圖. 22.
(38) 大齒輪之相對速度方程式可表示如下: V f( P 2 ). ⎡(Yc( P ) − r2φ 2 )ω 2 ⎤ ⎢ ⎥ = ⎢ − X c( P )ω 2 ⎥ ⎢ ⎥ 0 ⎣ ⎦. (3.13). 其中 X c( P ) = − a sin α n + l P cos α n − ( R2 − R2 cos θ 2 ) Yc( P ) = (b + a tan α n ) − l P sin α n. 由於齒條刀在創成齒輪之瞬間,亦會有共同切平面產生,此共同切平 面之法向量(3.8)及(3.9)與齒條刀與齒輪之相對速度(3.12)及(3.13)分別互相 垂直,所以依據第二章基本理論及方程式(3.4)其內積必為零: N (cF ) • Vc( F 1) = (r1φ1 − Yc( F ) ) sin α n − X c( F ) cos α n = 0. (3.14). 其中 X c( F ) = −a sin α n + l F cos α n − ( R1 − R1 cos θ1 ) Yc( F ) = (b + a tan α n ) − l F sin α n. 方程式(3.14)表示齒條刀 ∑ F 左右齒面與小齒輪之嚙合方程式。同理,齒 條刀 ∑ P 左右兩邊齒面與大齒輪之嚙合方程式亦可以相同之步驟求得如下: N (cP ) • Vc( P 2 ) = (Yc( P ) − r2 φ 2 ) sin α n + X c( P ) cos α n = 0. (3.15). 其中 X c( P ) = − a sin α n + l P cos α n − ( R2 − R2 cos θ 2 ) Yc( P ) = (b + a tan α n ) − l P sin α n. 3.5 球形齒輪之齒面方程式 根據齒輪原理[1],欲求得被創成齒輪的齒面數學模式,除了嚙合方程 式外還必須求得刀具表示在被創成齒輪座標系之軌跡方程式。齒條刀刀具 面在小齒輪座標系所形成的軌跡方程式,可利用齊次座標轉換,將齒條刀 在 S c 座標系上的位置向量 R c ,轉換至小齒輪座標系 S1 ,以求得其位置向量 R 1 ,此座標轉換方程式可表示如下: 23.
(39) (3.16). R 1 = M 1c R c( F ). 其中 ⎡cos φ1 ⎢ sin φ 1 M 1c = ⎢ ⎢ 0 ⎢ ⎣ 0. − sin φ1 cos φ1 0 0. 0 r1 (cos φ1 + φ1 sin φ1 )⎤ 0 r1 (sin φ1 − φ1 cos φ1 )⎥⎥ ⎥ 1 0 ⎥ 0 1 ⎦. 因此,齒條刀其刀具面表示在小齒輪座標系 S1 上之軌跡方程式可求得如下: ⎡ E cos φ1 − F sin φ1 + r1 (cos φ1 + φ1 sin φ1 ) ⎤ R 1 = ⎢⎢ E sin φ1 + F cos φ1 + r1 (sin φ1 − φ1 cos φ1 )⎥⎥ ⎥⎦ ⎢⎣ R1 sin θ1. (3.17). 其中 E = − a + l F cos α n − ( R1 − R1 cos θ1 ) F = m (b + a tan α n ) ± l F sin α n. 因方程式(3.17)表示齒條刀左右齒面在小齒輪座標系 S1 之軌跡方程式,若將 軌跡方程式(3.17)與嚙合方程式(3.14)聯立,即可得到球形齒輪之齒面數學方 程式。 同理,創成大齒輪之齒條刀之刀具面 ∑ P 表示在大齒輪座標系 S 2 之軌跡 方程式亦可依此一流程求出,其軌跡方程式如下: R 2 = M 2c R. (P) c. ⎡ G cos φ 2 + H sin φ 2 − r2 (cos φ 2 + φ 2 sin φ 2 ) ⎤ = ⎢⎢− G sin φ 2 + H cos φ 2 + r2 (sin φ 2 − φ 2 cos φ 2 )⎥⎥ ⎥⎦ ⎢⎣ R2 sin θ 2. (3.18). 其中. M 2c. ⎡ cos φ 2 ⎢− sin φ 2 =⎢ ⎢ 0 ⎢ ⎣ 0. sin φ 2 cos φ 2 0 0. 0 − r2 (cos φ 2 + φ 2 sin φ 2 )⎤ 0 r2 (sin φ 2 − φ 2 cos φ 2 ) ⎥⎥ ⎥ 1 0 ⎥ 0 1 ⎦. G = −a + l P cos α n − ( R2 − R2 cos θ 2 ) H = m (b + a tan α n ) ± l P sin α n. 若將此軌跡方程式(3.18)與嚙合方程式(3.15)聯立,即可求得球形大齒輪之齒 面數學模式 24.
(40) 3.6 球形齒輪之電腦輔助繪圖 依據上一小節所建立之球形齒輪齒面數學模式,加上電腦輔助繪圖軟 體即可繪出齒輪外形。在此舉一例以驗證本章所推導之球形齒輪之齒面數 學模式。球形大、小齒輪之主要設計參數如表 3.1 所列,再依據本章所建立 之球形齒輪的齒面數學模式,藉由電腦輔助設計與輔助繪圖軟體,即可繪 出球形齒輪之齒面外形。如圖 3.7 及圖 3.8 所示。 表 3.1 球形齒輪之主要設計參數 小齒輪(凸狀). 大齒輪(凹狀). 模數(mm/teeth) 壓力角(度) α n. 4. 4. 20. 20. 齒數. 36. 36. 球形半徑(mm)R. 72. 72. 球形角度(度) θ. 20. 15. 3.7 球形齒輪之過切分析 一般來說,齒輪之齒面為規則曲面,即齒面上不存在奇異點,若齒面 上出現奇異點,即表示齒面發生過切(Undercutting),齒輪之過切現象多發 生在靠近齒根的地方,若是嚴重的齒面過切,則此過切線將往齒面之上方 移動。齒面過切對齒輪所造成的影響很多,其中較為重大的影響有齒輪強 度減弱、造成應力集中的現象,也減低齒輪之接觸比(Contact Ratio)。但齒 輪過切並非都只有缺點,微量的過切可以用來減少齒輪干涉問題及儲油與 鐵屑,對齒輪之壽命及磨耗皆有幫助。 由微分幾何可知,曲面上之一點,若其切向量不存在或切向量大小等 於零,則此點稱為奇異點。以下將應用 Litvin[7][8]所提出之過切分析方法, 分析球形齒輪之過切點發生之情形。. 3.7.1 過切條件 如前所述,以 ∑ F 為齒條刀刀面用來創成球形齒輪小齒輪之齒面 ∑1 ,在 25.
(41) 圖 3.7 凸狀球形齒輪之電腦繪圖. 26.
(42) 圖 3.8 凹狀球形齒輪之電腦繪圖. 27.
(43) 創成過程中,兩者瞬間接觸點之位置向量若表示在同一座標系上,則其位 置向量應相等。因此,將 ∑ F 與 ∑1 表示於固定座標系 S f ( X f , Y f , Z f ) ,則下式 必成立:. (3.19). R (fF ) = R (f1). 將方程式(3.19)對時間微分可得:. (3.20). Vtr( F ) + Vr( F ) = Vtr(1) + Vr(1). 將方程式(3.20)移項整理後可得:. (3.21). Vr(1) = Vtr( F ) + Vr( F ) − Vtr(1) = Vr( F ) + V ( F 1). 方程式(3.20)及(3.21)中, Vtr( F ) 與 Vtr(1) 表示接觸點分別隨著刀具與齒面之 運動速度, Vr( F ) 與 Vr(1) 表示接觸點分別沿著刀具與齒面之切線速度。由奇異 點之定義可知,當 Vr(1) = 0 時,齒面上將出現奇異點,即發生過切現象。因 此,齒面發生過切之必要條件可表示如下:. (3.22). Vr( F ) + V ( F 1) = 0. 接著將嚙合方程式(3.14)對時間微分,可寫成下列方程式: d f (l F ,θ1 , φ1 ) = 0 dt. (3.23). 由方程式(3.22)及(3.23)即可在齒條刀之刀面上定義出一限制曲線,此限 制曲線即為齒條刀在創成齒輪時,齒輪齒面產生過切現象之過切線。當齒 條刀刀面 ∑ F 上的點位於限制曲線上或超過限制曲線,則這些刀面上之點將 在創成小齒輪齒面 ∑ 1 上造成齒面之過切。將方程式(3.22)及(3.23)整理過後 可分別表示如下: ∂R c( F ) dl F ∂R c( F ) dθ1 + = − Vc( F 1) ∂l F dt ∂θ1 dt. (3.24). ∂f dφ1 ∂f dθ1 ∂f dl F =− + ∂φ1 dt ∂θ 1 dt ∂l F dt. (3.25). 其中 Vc( F ) 表示齒條刀 ∑ F 之齒面方程式, Vc( F 1) 則表示齒條刀 ∑ F 及小齒輪齒面 ∑1 瞬間接觸點之相對速度。將方程式(3.24)及(3.25)以矩陣型式表示,可改 28.
(44) 寫成如下: ⎡ ∂xc( F ) ⎢ ⎢ ∂l( FF ) ⎢ ∂y c ⎢ ∂l ⎢ ( FF ) ⎢ ∂z c ⎢ ∂l ⎢ ∂fF ⎢ ⎢⎣ ∂l F. ∂x c( F ) ⎤ ⎥ ∂θ1 ⎥ ∂y c( F ) ⎥ ⎡ dl F ∂θ1 ⎥ ⎢ dt ⎥⎢ ∂z c( F ) ⎥ ⎢ dθ1 ∂θ1 ⎥ ⎣ dt ∂f ⎥⎥ ∂θ1 ⎥⎦. ⎡ − Vxc( F 1) ⎤ ⎤ ⎢ − V ( F 1) ⎥ yc ⎥ ⎥ ⎢ ⎥ = ⎢ − Vzc( F 1) ⎥ ⎥ ⎢ ∂f dφ ⎥ 1 ⎥ ⎦ ⎢− ⎢⎣ ∂φ1 dt ⎥⎦. (3.26). 由線性代數之理論可知,方程式(3.26)存在唯一解之充要條件為方程式. (3.26)之增廣矩陣(Augmented Matrix)的秩數(Rank)為二,亦即必須同時滿足 下列方程式: ∂xc( F ) ∂l F ∂y c( F ) Δ1 = ∂l F flF. ∂x c( F ) ∂l F ∂z c( F ) Δ2 = ∂l F flF ∂y c( F ) ∂l F ∂z c( F ) Δ3 = ∂l F flF ∂xc( F ) ∂l F ∂y c( F ) Δ4 = ∂l F ∂z c( F ) ∂l F. ∂xc( F ) ∂θ1 ∂y c( F ) ∂θ1 f θ1. ∂xc( F ) ∂θ 1 ∂z c( F ) ∂θ 1 f θ1 ∂y c( F ) ∂θ1 ∂z c( F ) ∂θ1 f θ1 ∂xc( F ) ∂θ1 ∂y c( F ) ∂θ1 ∂z c( F ) ∂θ1. − Vxc( F 1). (3.27). − Vyc( F 1) = 0 − f φ1. dφ1 dt. − Vxc( F 1). (3.28). − Vzc( F 1) = 0 − f φ1. dφ1 dt. − Vyc( F 1). (3.29). − Vzc( F 1) = 0 − f φ1. dφ1 dt. − Vxc( F 1). (3.30). − Vyc( F 1) = 0 − Vzc( F 1). 29.
(45) 其中,方程式(3.30)即為嚙合方程式。方程式(3.27)至(3.29)可用來求得小齒 輪齒面 ∑1 產生奇異點之條件,即小齒輪齒面過切之條件。此奇異點之充分 條件可表示成: F (l F ,θ1 , φ1 ) = Δ21 + Δ22 + Δ23 = 0. (3.31). f (l F ,θ1 , φ1 ) = 0. (3.32). 由於方程式(3.31)及(3.32)為兩個非線性方程式具有 l F ,θ1 及 φ1 三個未知數, 因此,將 θ1 視為已知條件而給定一數值以求解一組對應之 l F 及 φ1 ,再將 θ1 予 以增量,求解另一組對應之 l F 及 φ1 ,如此即可求得刀具上創成奇異點之限 制曲線。 同理,大齒輪之過切條件式亦可依據上述相同步驟求得如下: F (l P , θ 2 , φ 2 ) = Δ21 + Δ22 + Δ23 = 0. (3.33). f (l P , θ 2 , φ 2 ) = 0. (3.34). 其中 ∂xc( P ) ∂l P ∂y ( P ) Δ1 = c ∂l P flP ∂x c( P ) ∂l P ∂z ( P ) Δ2 = c ∂l P flP ∂y c( P ) ∂l P ∂z ( P ) Δ3 = c ∂l P flP. ∂x c( P ) ∂θ 2 ∂y c( P ) ∂θ 2 f θ2 ∂xc( P ) ∂θ 2 ∂z c( P ) ∂θ 2 f θ2 ∂y c( P ) ∂θ 2 ∂z c( P ) ∂θ 2 f θ2. − Vxc( P 2) − Vyc( P 2) − f φ2. =0. (3.35). =0. (3.36). =0. (3.37). dφ 2 dt. − Vxc( P 2) − Vzc( P 2) − f φ2. dφ 2 dt. − Vyc( P 2) − Vzc( P 2) − f φ2. dφ 2 dt. 30.
(46) ∂xc( P ) ∂l P ∂y ( P ) Δ4 = c ∂l P ∂z c( P ) ∂l P. ∂xc( P ) ∂θ 2 ∂y c( P ) ∂θ 2 ∂z c( P ) ∂θ 2. − Vxc( P 2). (3.38). − Vyc( P 2) = 0 − Vzc( P 2). 3.7.2 例題與討論 例題 3.1 球形齒輪之過切線位置 表 3.2 球形齒輪之設計參數 凸狀球形齒輪. 凹狀球形齒輪. 模數(mm/teeth). 4. 4. 齒數(齒) 壓力角(度) α n. 18. 18. 14.5. 20.0. 14.5. 球形半徑(mm)R. 36. 36. 球形角度(度) θ. 20. 20. 球形齒輪之主要設計參數如表 3.2 所示。依據上一小節所推導之齒面過 切條件方程式(3.31)及(3.32),來探討球形齒輪齒面之過切情形。 由於球形齒輪可視為自齒面中央截面開始,其齒面之轉位量呈連續之 二次曲線變化的正齒輪,連續正轉位即為凹狀球形齒輪,連續負轉位則為 凸狀球形齒輪。因此,球形齒輪在中央截面處(Z=0 mm)的過切情形與正齒 輪相同,因在中央截面處之轉位量為零。由於凸狀球形齒輪是正齒輪連續 負轉位所產生的齒輪,因此若將球形齒輪之球形角加大為 θ1 = 20 o ,在壓力 角 α n = 20.0 o 的條件下,則可在齒的兩側發現因負轉位量過大而產生齒面的 過切現象,如圖 3.9 所示。若球形齒輪之壓力角下降至 14.5 度、齒數仍為. 18 齒且球形角亦為 20 度時,則此時齒面之過切現象將相當嚴重,在齒面之 中央截面處亦可發現過切現象,如圖 3.10 所示,此種過切現象亦與正齒輪 在相同壓力角及齒數時會產生過切的情形相同。若將圖 3.9 之視角拉至齒輪. 31.
(47) 圖 3.9 壓力角 20°及球形角 20°時之凸狀球形齒輪之過切線位置. 圖 3.10 壓力角 14.5°及球形角 20°時之凸狀球形齒輪之過切線位置. 32.
(48) 端面觀察時,如圖 3.11 所示,可發現凸狀球形齒輪在中央截面處及球形角 度 θ1 = 0 o 為一標準漸開線齒形,而在凸狀球形齒輪端面處(即 θ1 = 20 o ),因負 轉位的影響,齒輪的齒肉有被刮除的現象,亦即齒面產生過切現象。 若考慮連續正轉位的條件,則創成出來之齒輪齒面即為凹狀球形齒輪。 在壓力角 α n = 14.5o 、齒數為 18 齒的狀況下,其過切線產生的位置會在齒輪 中央部份出現,如圖 3.12 所示。凹狀球形齒輪的過切線位置出現在齒輪中 央截面附近,這是因為凹狀球形齒輪是考慮連續正轉位的正齒輪,因此在 齒輪的兩側附近其齒面將不會出現過切之現象。. 例題 3.2 球形齒輪過切線開始之位置 假設凸狀球形齒輪之模數為 4,齒形設計參數 a=0.8M,分別考慮壓力 角 α n = 14.5o 、 α n = 20.0 o 及 α n = 25.0 o 三種狀況,探討在 18 齒、24 齒及 36 齒 的條件下,球形齒輪其齒面開始產生過切之球形角的角度及其相對應之 Z 截面的數值。 表 3.3 表示在幾種不同壓力角與齒數配對下,凸狀球形齒輪因負轉位而 其齒面開始產生過切之球形角的角度及其相對應之 Z 截面的數值。由表 3.3 中可觀察出,球形齒輪在壓力角 α n = 14.5o 的條件下,必須將齒數提高才不致 有過切現象產生,在齒數為 36 齒的條件下,球形角度在 θ = ±10.961o 度才會 開始產生過切,換算成 Z 截面則為±6.845 mm。若將齒面壓力角提高至 20.0 度或 25.0 度時,則球形齒輪齒數可降低至 18 齒時齒面之中央截面亦不產生 過切。表 3.3 所發現之球形齒輪特性,與一般常見之齒輪有相同的特性,亦 即若將齒面壓力角提高時,齒輪之齒數可以降低至一個程度之少齒數,其 齒面亦不產生過切。. 33.
(49) 圖 3.11 不同截面處凸狀球形齒輪(壓力角=20.0°)之過切情形. 圖 3.12 壓力角 14.5°及球形角 20°時之凹狀球形齒輪之過切線位置. 34.
(50) 表 3.3 不同齒輪參數下球形齒輪發生齒面過切之球形角及對應之 Z 截面的 數值 壓力角(度) 球形角(度) Z 截面(mm). M=4 mm/teeth , a=0.8M 球形角(度) Z 截面(mm). 球形角(度) Z 截面(mm). T1=24. T1=36. T1=18 14.5. *. *. *. *. ±10.961. ±6.845. 20.0. ±13.611. ±8.472. ±18.250. ±11.274. ±21.956. ±13.460. 25.0. ±24.374. ±14.857. ±27.369. ±16.550. ±30.021. ±18.012. 註*表示在中央截面(Z=0 mm)處即已產生齒面過切之現象. 3.8 小論 本章中吾人依據創成原理推導出球形齒輪之齒面數學方程式,此數學 模式包含了凸狀與凹狀的球形齒輪,也利用電腦輔助繪圖的方式表示出凸 狀與凹狀球形齒輪之外形。文中亦探討了球形齒輪之過切分析,利用球形 齒輪之數學方程式來推導過切產生之條件式,並配合電腦輔助繪圖來表示 球形齒輪之過切線產生之位置及截面。. 35.
(51) 第四章 球形齒輪之接觸分析 4.1 前言 齒輪組是常見的機械傳動元件,其在進行嚙合運動時,齒形的誤差常 是影響齒輪組傳動性能優劣的重要因素之一。齒形誤差包括單一齒形誤 差、連續累積齒形誤差、導程角誤差、壓力角誤差、齒厚誤差、接觸比誤 差和軸向偏擺等。因此,提高齒輪之製造精度是提升傳動性能的重點之一。 但是當上述之靜態精度提高以後,若齒輪組在進行裝配的過程中,具有水 平軸偏差、垂直軸偏差或是中心距的偏差,亦會影響組裝後整體齒輪組的 傳動性能。利用電腦模擬分析齒輪組在進行嚙合運動的表現,透過齒形參 數的改變與創成刀具的設計,可以設計出最佳傳動條件的齒輪組。. Litvin[7][8]建立齒輪接觸分析模式,利用模擬齒輪滾削機構所推導之理想齒 輪齒面數學模式,可用以模擬齒輪組傳動時所產生的運動誤差 (Kinematic. Error)。 接觸比在齒輪組的嚙合分析中,亦關係到齒輪強度與動態負載,因此 也是相當重要的設計參數之一。在本章中,將討論幾個針對組裝誤差的例 題與理想情況,依據球形齒輪之嚙合機構,建立其接觸分析之數學模式並 模擬其接觸狀況,進而求出接觸軌跡、運動誤差及接觸比。. 4.2 球形齒輪之接觸分析數學模式 在進行球形齒輪組之齒面接觸分析(Tooth Contact Analysis)時,首先需 將球形齒輪之齒面數學方程式及其齒面單位法向量,表示在同一個座標系 上再加以分析。如圖 4.1 所示,依據球形齒輪組嚙合機構,座標系 S1 ( X 1 , Y1 , Z1 ) 與座標系 S 2 ( X 2 , Y2 , Z 2 ) 分別固聯在小、大球形齒輪上,其中 Z1 與 Z 2 分別為小、 大球形齒輪之旋轉軸,φ1' 與 φ 2' 分別為小、大齒輪實際嚙合時之旋轉角。座標 系 S f ( X f , Y f , Z f ) 為固定座標系,座標系 S v ( X v , Yv , Z v ) 和座標系 S h ( X h , Yh , Z h ) 分別 36.
(52) 圖 4.1 球形齒輪組組裝誤差關係圖. 37.
(53) 為具有垂直與水平軸向偏差下,相對於 S1 ( X 1 , Y1 , Z1 ) 與 S 2 ( X 2 , Y2 , Z 2 ) 之參考座 標系。其中 Δγ h 、 Δγ v 和 ΔC 分別為球形齒輪組之水平軸向裝配誤差、垂直軸 向裝配誤差與中心距裝配誤差。 由於空間中一對嚙合齒輪之瞬間接觸點的位置向量表示在同一座標系 上會相等[7][8],因此可利用齊次座標轉換方法,將球形齒輪之齒面方程式 及單位法向量轉換至固定座標系 S f 如下所示: R (f1) = M fh M hv M v1 R 1. (4.1). n (f1) = L fh L hv L v1 n 1. (4.2). 及. 其中. M fh. M hv. 0 ⎡1 ⎢0 cos Δγ h =⎢ ⎢0 − sin Δγ h ⎢ 0 ⎣0 ⎡ cos Δγ v ⎢ 0 =⎢ ⎢− sin Δγ v ⎢ 0 ⎣. 0 sin Δγ h cos Δγ h 0. 0 sin Δγ v 1 0 0 cos Δγ v 0 0. ⎡ cos φ1′ sin φ1′ ⎢− sin φ ′ cos φ ′ 1 M v1 = ⎢ ⎢ 0 0 ⎢ 0 ⎣ 0. L fh. 0 ⎡1 = ⎢⎢0 cos Δγ h ⎢⎣0 − sin Δγ h. L hv. ⎡ cos Δγ v = ⎢⎢ 0 ⎢⎣− sin Δγ v. 0 0 1 0. 0⎤ 0⎥⎥ 0⎥ ⎥ 1⎦ 0⎤ 0⎥⎥ 0⎥ ⎥ 1⎦. 0⎤ 0⎥⎥ 0⎥ ⎥ 1⎦. 0 ⎤ sin Δγ h ⎥⎥ cos Δγ h ⎥⎦. 0 sin Δγ v ⎤ 1 0 ⎥⎥ 0 cos Δγ v ⎥⎦. 38.
(54) ⎡ cos φ1′ sin φ1′ 0⎤ L v1 = ⎢⎢− sin φ1′ cos φ1′ 0⎥⎥ ⎢⎣ 0 0 1⎥⎦. 因此,小齒輪之軌跡方程式表示在 S f 座標系中為:. R (f1). ⎡ x (f1) ⎤ ⎢ ⎥ = ⎢ y (f1) ⎥ ⎢ z (f1) ⎥ ⎣ ⎦. (4.3). ⎡ ⎤ ( x1 cos φ1' + y1 sin φ1' ) cos Δγ v + z1 sin Δγ v ⎢ ⎥ ' ' ' ' = ⎢ ( − x1 sin φ1 + y1 cos φ1 ) cos Δγ h + − ( x1 cos φ1 + y1 sin φ1 ) sin Δγ v + z1 cos Δγ v sin Δγ h ⎥ ⎢− (− x1 sin φ1' + y1 cos φ1' ) sin Δγ h + − ( x1 cos φ1' + y1 sin φ1' ) sin Δγ v + z1 cos Δγ v cos Δγ h ⎥ ⎣ ⎦. [ [. ] ]. 其中 x1 、 y1 及 z1 為小齒輪之軌跡方程式,且方程式(4.3)與小齒輪之嚙合方程 式(3.14)聯立,即可求得小齒輪之齒面方程式表示於 S f 座標系。小齒輪之單 位法向量表示在固定座標系 S f 中為:. n (f1). ⎡n (fx1) ⎤ ⎢ ⎥ = ⎢n (fy1) ⎥ ⎢n (fz1) ⎥ ⎣ ⎦. (4.4). ⎡ ⎤ ( n1x cos φ1' + n1 y sin φ1' ) cos Δγ v + n1z sin Δγ v ⎢ ⎥ ' ' ' ' = ⎢ ( − n1x sin φ1 + n1 y cos φ1 ) cos Δγ h + − (n1x cos φ1 + n1 y sin φ1 ) sin Δγ v + n1z cos Δγ v sin Δγ h ⎥ ⎢− (− n1x sin φ1' + n1 y cos φ1' ) sin Δγ h + − (n1x cos φ1' + n1 y sin φ1' ) sin Δγ v + n1z cos Δγ v cos Δγ h ⎥ ⎣ ⎦. [ [. ] ]. 其中 n1x 、 n1 y 及 n1z 為小齒輪之單位法向量。同理,可將大齒輪之軌跡方程式 及單位法向量方程式轉換至固定座標系 S f 如下所示: R (f2) = M f 2 R 2. (4.5). n (f2) = L f 2 n 2. (4.6). 其中. 39.
(55) Mf2. Lf2. ⎡cos φ 2′ ⎢ sin φ 2′ =⎢ ⎢ 0 ⎢ ⎢⎣ 0. − sin φ 2′ cos φ 2' 0. ⎡cos φ 2′ = ⎢⎢ sin φ 2′ ⎢⎣ 0. − sin φ 2′ cos φ 2′ 0. 0. 0 C'⎤ ⎥ 0 0⎥ 1 0⎥ ⎥ 0 1 ⎥⎦ 0⎤ 0⎥⎥ 1⎥⎦. C ' = r1 + r2 + ΔC. 因此,大齒輪之軌跡方程式表示在 S f 座標系中為: R (f2). ⎡ x 2 cos φ 2' − y 2 sin φ 2' + C ' ⎤ ⎢ ⎥ = ⎢ x 2 sin φ 2' + y 2 cos φ 2' ⎥ ⎢ ⎥ z2 ⎣ ⎦. (4.7). 其中 x 2 、 y 2 及 z 2 為大齒輪之軌跡方程式,且方程式(4.7)與大齒輪之嚙合方 程式(3.15)聯立,即可求得大齒輪之齒面方程式表示於 S f 座標系。大齒輪之 單位法向量表示在固定座標系 S f 中為: n (f2). ⎡n 2 x cos φ 2' − n 2 y sin φ 2' ⎤ ⎢ ⎥ = ⎢n2 x sin φ 2' + n2 y cos φ 2' ⎥ ⎢ ⎥ n2 z ⎣ ⎦. (4.8). 其中 n2 x 、 n2 y 及 n2 z 為大齒輪之單位法向量。. 4.3 球形齒輪之運動誤差分析模式 球形齒輪組在進行嚙合傳動時,小齒輪齒面 ∑1 和大齒輪齒面 ∑ 2 ,需滿 足相切之條件,亦即兩嚙合齒面之瞬間接觸點 P,必落在大、小齒輪齒面之 切平面上,如圖 4.2 所示。因此,大、小齒輪之位置向量在固定座標系 S f (X f , Y f , Z f ) 中必須相同,且其個別之單位法向量必共線[7][8],因此必須. 滿足下列方程式:. (4.9). R (f1) − R (f2) = 0. 及 40.
(56) 圖 4.2 兩齒輪嚙合時之齒面關係圖. 41.
(57) (4.10). n (f1) × n (f2) = 0. 方程式(4.9)表示大、小齒輪齒面在其共同接觸點處兩者之位置向量相等, 因此,(4.9)式可表示為三個獨立的位置向量方程式。方程式(4.10)則表示大、 小齒輪齒面在其共同接觸點處其齒面之單位法向量共線,亦即兩個單位法 向量之外積(Cross Product)等於零,但方程式(4.10)僅有兩個獨立方程式,因 為單位法向量的長度為 1 (即 | n (f1) |=| n (f2) |= 1 )。利用齒刀 ∑ P 和 ∑ F 分別來創成 大、小齒輪時,會有兩個獨立的嚙合方程式存在,所以在進行球形齒輪組 之齒面接觸分析時,實際上共有七個方程式來求解八個未知數 l F 、 l P 、θ1 、 θ 2 、 φ1 、 φ 2 、 φ1′ 及 φ 2′ 。因此,若將小齒輪轉角 φ1′ 設為已知,則球形齒輪組之. 齒面接觸分析即成為七個獨立方程式來求解七個未知數。此七個方程式非 線性可使用數值分析方法來求解七個未知數。在求得球形齒輪組之接觸點 以及其運動參數後,球形齒輪組嚙合時之運動誤差則可由下式求得: Δφ 2 = φ 2′ −. T1 φ1′ T2. (4.11). 其中 T2 及 T1 與 φ 2′ 及 φ1′ 分別為球形齒輪大、小齒輪之齒數與嚙合時之旋轉角 度。. 4.4 球形齒輪之接觸比 齒輪組之接觸比一般可定義為兩齒面從開始接觸至最後離開接觸,相 對於齒輪中心所包括的作用角,除以相鄰兩齒相對應點的夾角,即單一齒 之對應角度,亦即理論接觸比,如下式所示。 φ1E − φ1S. (4.12). 360 o T1. 其中, T1 表示小齒輪之齒數, φ1E 及 φ1S 則分別表示小齒輪接觸起點與接觸終 點所對應之小齒輪的旋轉角。. 42.
(58) 但實際上,齒輪組真正嚙合時接觸比則不容易求得。若是再細分接觸 比的種類與定義,還可有瞬時接觸齒數和平均接觸比。瞬時接觸齒數則定 義為齒輪組在進行嚙合的瞬間,兩個齒輪實際上所接觸的齒數;平均接觸 比則定義為在齒輪組之作用線上各接觸取樣點,從開始接觸點瞬時之接觸 齒數至最後接觸點之瞬時接觸齒數的總和,除以球形齒輪嚙合傳動一循環 開始接觸點至最後接觸點的總取樣接觸點數。 本論文中,吾人定義齒輪單一顆齒的工作區間(即 l F 之範圍)作為計算球 形齒輪接觸比的範圍,取樣此工作區間之開始與結束的位置所對應之實際 齒輪旋轉角的範圍,再除以單一顆齒所佔之角度,即為本論文之接觸比。 接觸比之分析結果討論於例題 4.12。. 4.5 例題討論 依據 4.3 節所推導之球形齒輪接觸分析數學模式,可使用電腦來模擬球 形齒輪組之接觸情形。以下將討論凸狀球形齒輪配對凸狀球形齒輪、凸狀 球形齒輪配對凹狀球形齒輪及凸狀球形齒輪配對正齒輪分別在具有各種裝 配誤差下之接觸情形與運動誤差。 例題 4.1 理想狀況下之接觸分析 球形齒輪之主要設計參數如表 4.1 所示。假設球形齒輪組分別為 Case1 配對 Case2、Case1 配對 Case3 及 Case1 配對 Case4,而其組裝情形均為理 想狀況亦即 Δγ h = 0.0 o 、 Δγ v = 0.0 o 及 ΔC = 0.0mm 。 表 4.1 球形齒輪之主要設計參數(1) Case1 凸狀球形齒輪. Case2 凸狀球形齒輪. Case3 凹狀球形齒輪. Case4 正齒輪. 模數(mm/teeth). 4. 4. 4. 4. 齒數 壓力角(度) α n. 36. 48. 48. 48. 20. 20. 20. 20. 球形半徑(mm)R. 72. 96. 96. 96. 43.
(59) 前述這三組球形齒輪組之接觸和運動誤差分析結果如表 4.2、表 4.3 及 表 4.4 所示。其中 θ1 與 θ 2 欄其值均為 0.000 度(請參考圖 3.1),亦即表示球形 齒輪組的接觸位置在齒輪旋轉軸中央截面(即 Z = 0.0 mm)處。由表中所示之 球形齒輪組嚙合運動誤差值(K.E)均為零,顯示球形齒輪對在理想的裝配狀 況下,將不會產生運動誤差,與正齒輪及螺旋齒輪在理想裝配情形下相同。 這表示若球形齒輪之製造與組裝條件完全符合理想狀況以及齒輪不受力變 形,則球形齒輪組之嚙合將不具運動誤差。因凸狀球形齒輪及凹狀球形齒 輪在中央截面處之齒形與正齒輪相同,且轉位量皆為零,因此,在理想狀 況下,三種配對情況之分析結果則會相同。由於齒輪組理想狀況之裝配在 現實之自動化組裝或快速之人工組裝線上難以達成,因此,在具有各種裝 配誤差下齒輪之運動特性之探討將顯的重要且必要,以下將討論球形齒輪 組在具裝配誤差下之接觸情形。. 表 4.2 凸狀球形齒輪配對凸狀球形齒輪在理想裝配條件下之運動誤差 組裝狀態:壓力角=20.0°、 ΔC = 0.0mm 、 Δγ h = 0.0 o 、 Δγ v = 0.0 o. φ1' (度). φ 2' (度). l F (mm). l P (mm). θ1 (度). θ 2 (度). K.E(arc-sec). -10.00. -7.50. 0.182. 0.182. 0.000. 0.000. 0.000. -8.00. -6.00. 1.042. 1.042. 0.000. 0.000. 0.000. -6.00. -4.50. 1.901. 1.901. 0.000. 0.000. 0.000. -4.00. -3.00. 2.761. 2.761. 0.000. 0.000. 0.000. -2.00. -1.50. 3.620. 3.620. 0.000. 0.000. 0.000. 0.00. 0.00. 4.480. 4.480. 0.000. 0.000. 0.000. 2.00. 1.50. 5.340. 5.340. 0.000. 0.000. 0.000. 4.00. 3.00. 6.199. 6.199. 0.000. 0.000. 0.000. 6.00. 4.50. 7.059. 7.059. 0.000. 0.000. 0.000. 8.00. 6.00. 7.918. 7.918. 0.000. 0.000. 0.000. 10.00. 7.50. 8.778. 8.778. 0.000. 0.000. 0.000. 44.
(60) 表 4.3 凸狀球形齒輪配對凹狀球形齒輪在理想裝配條件下之運動誤差 組裝狀態:壓力角=20.0°、 ΔC = 0.0mm 、 Δγ h = 0.0 o 、 Δγ v = 0.0 o. φ1' (度). φ 2' (度). l F (mm). l P (mm). θ1 (度). θ 2 (度). K.E(arc-sec). -10.00. -7.50. 0.182. 0.182. 0.000. 0.000. 0.000. -8.00. -6.00. 1.042. 1.042. 0.000. 0.000. 0.000. -6.00. -4.50. 1.901. 1.901. 0.000. 0.000. 0.000. -4.00. -3.00. 2.761. 2.761. 0.000. 0.000. 0.000. -2.00. -1.50. 3.620. 3.620. 0.000. 0.000. 0.000. 0.00. 0.00. 4.480. 4.480. 0.000. 0.000. 0.000. 2.00. 1.50. 5.340. 5.340. 0.000. 0.000. 0.000. 4.00. 3.00. 6.199. 6.199. 0.000. 0.000. 0.000. 6.00. 4.50. 7.059. 7.059. 0.000. 0.000. 0.000. 8.00. 6.00. 7.918. 7.918. 0.000. 0.000. 0.000. 10.00. 7.50. 8.778. 8.778. 0.000. 0.000. 0.000. 表 4.4 凸狀球形齒輪配對正齒輪在理想裝配條件下之運動誤差 組裝狀態:壓力角=20.0°、 ΔC = 0.0mm 、 Δγ h = 0.0 o 、 Δγ v = 0.0 o. φ1' (度). φ 2' (度). l F (mm). l P (mm). θ1 (度). θ 2 (度). K.E(arc-sec). -10.00. -7.50. 0.182. 0.182. 0.000. 0.000. 0.000. -8.00. -6.00. 1.042. 1.042. 0.000. 0.000. 0.000. -6.00. -4.50. 1.901. 1.901. 0.000. 0.000. 0.000. -4.00. -3.00. 2.761. 2.761. 0.000. 0.000. 0.000. -2.00. -1.50. 3.620. 3.620. 0.000. 0.000. 0.000. 0.00. 0.00. 4.480. 4.480. 0.000. 0.000. 0.000. 2.00. 1.50. 5.340. 5.340. 0.000. 0.000. 0.000. 4.00. 3.00. 6.199. 6.199. 0.000. 0.000. 0.000. 6.00. 4.50. 7.059. 7.059. 0.000. 0.000. 0.000. 8.00. 6.00. 7.918. 7.918. 0.000. 0.000. 0.000. 10.00. 7.50. 8.778. 8.778. 0.000. 0.000. 0.000. 45.
(61) 例題 4.2 球形齒輪組具中心距誤差之接觸分析 球形齒輪之主要設計參數亦如表 4.1 所示。假設前例之三組球形齒輪組. (Case1 配對 Case2、Case1 配對 Case3 及 Case1 配對 Case4)只具有中心距裝 配誤差 ΔC = 1mm (5.6%)。. Case1 配對 Case2 之球形齒輪組具中心距裝配誤差之接觸和運動誤差的 分析結果如表 4.5 所示。因球形齒輪之齒面為理想的漸開線,故嚙合齒輪組 之中心距偏差對球形齒輪組之運動誤差並不會產生影響。因此球形齒輪組 在具有中心距之裝配誤差下,其運動誤差依然為零。且球形齒輪組在具中 心距裝配誤差狀況下,其接觸位置亦仍落在中央截面處,亦即 Z=0mm。由 於凸狀球形齒輪及凹狀球形齒輪在其中央截面處之轉位量皆為零,與正齒 輪相同,因此,Case1 配對 Case3 及 Case1 配對 Case4 之接觸分析結果皆與 表 4.5 相同。. 表 4.5 具中心距誤組裝差下球形齒輪組之運動誤差 組裝狀態:壓力角=20.0°、 ΔC = 1mm 、 Δγ h = 0.0 o 、 Δγ v = 0.0 o. φ1' (度). φ 2' (度). l F (mm). l P (mm). θ1 (度). θ 2 (度). K.E(arc-sec). -10.00. -7.50. 0.574. -0.468. 0.000. 0.000. 0.000. -8.00. -6.00. 1.433. 0.392. 0.000. 0.000. 0.000. -6.00. -4.50. 2.293. 1.252. 0.000. 0.000. 0.000. -4.00. -3.00. 3.153. 2.111. 0.000. 0.000. 0.000. -2.00. -1.50. 4.012. 2.971. 0.000. 0.000. 0.000. 0.00. 0.00. 4.872. 3.830. 0.000. 0.000. 0.000. 2.00. 1.50. 5.731. 4.690. 0.000. 0.000. 0.000. 4.00. 3.00. 6.591. 5.549. 0.000. 0.000. 0.000. 6.00. 4.50. 7.450. 6.409. 0.000. 0.000. 0.000. 8.00. 6.00. 8.310. 7.269. 0.000. 0.000. 0.000. 10.00. 7.50. 9.170. 8.128. 0.000. 0.000. 0.000. 46.
(62) 例題 4.3 球形齒輪組分別具有水平軸向裝配誤差及垂直軸向裝配誤差之接 觸分析(1) 若球形齒輪之設計參數如表 4.6 所示。本例題將探討兩凸狀球形齒輪在 不同之齒形壓力角(14.5°、20°及 25°)下,球形齒輪組分別具有水平軸向裝配 誤差 Δγ h = 0.5o 及垂直軸向裝配誤差 Δγ v = 2.0 o 時之齒輪組接觸分析及運動誤 差分析。 表 4.6 球形齒輪之主要設計參數(2) 凸狀球形齒輪. 凸狀球形齒輪. 模數(mm/teeth). 4. 4. 齒數 壓力角(度) α n. 36. 48. 球形半徑(mm)R. 14.5. 20.0 72. 25.0. 14.5. 20.0. 25.0. 96. 由表 4.7-4.12 之齒輪組接觸和運動誤差分析結果可觀察出,球形齒輪在 具有軸向裝配誤差時,其接觸位置將偏離旋轉軸中央截面處(Z=0mm),即 θ1 與 θ 2 欄的值均不為零。當球形齒輪組只具有水平軸向之裝配誤差時,其齒 面接觸位置將落在在兩嚙合齒面的同一側,亦即 θ1 與 θ 2 同為正值或負值, 此一結果將由水平軸向之裝配誤差之正負值所決定。而齒輪組若只具有垂 直軸向之裝配誤差時,其齒面接觸位置將從兩嚙合齒面之同側轉變成另一 側,即 θ 2 由正值到負值。此結果與接觸分析所設定之齒輪組相對運動關係(圖. 4.1)相符。另外,若齒輪組在水平軸向之裝配誤差 Δγ h = 0.5o 下,其運動誤差 大小亦仍在可接受的範圍,如圖 4.3 所示。由於球形齒輪具有可以容許垂直 軸向之角度變化的特色,在此例題中特別假設齒輪組具有較大之垂直軸向 的裝配誤差 Δγ v = 2.0 o ,來觀察在此種裝配情形下齒輪組之接觸之運動誤差, 此分析結果如圖 4.4 所示。該圖顯示不同之齒形壓力角對於球形齒輪組之運 動誤差亦有所不同。較小之齒形壓力角對於垂直軸向的裝配誤差 Δγ v = 2.0 o 時 較不敏感,但壓力角過小時,切製齒輪時則較容易發生齒面過切的現象。 47.
數據
![圖 1.1 各種球形齒輪配對形況示意圖[1]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8607377.190451/17.892.141.835.198.428/圖11各種球形齒輪配對形況示意圖1.webp)
![圖 1.4 引擎軸與螺旋槳軸之連接[1]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8607377.190451/18.892.141.800.204.515/圖14引擎軸與螺旋槳軸之連接1.webp)


+7




相關文件
"Extensions to the k-Means Algorithm for Clustering Large Data Sets with Categorical Values," Data Mining and Knowledge Discovery, Vol. “Density-Based Clustering in
Wang, Solving pseudomonotone variational inequalities and pseudocon- vex optimization problems using the projection neural network, IEEE Transactions on Neural Networks 17
We explicitly saw the dimensional reason for the occurrence of the magnetic catalysis on the basis of the scaling argument. However, the precise form of gap depends
Define instead the imaginary.. potential, magnetic field, lattice…) Dirac-BdG Hamiltonian:. with small, and matrix
These are quite light states with masses in the 10 GeV to 20 GeV range and they have very small Yukawa couplings (implying that higgs to higgs pair chain decays are probable)..
• Contact with both parents is generally said to be the right of the child, as opposed to the right of the parent. • In other words the child has the right to see and to have a
Nicolas Standaert, "Methodology in View of Contact Between Cultures: The China Case in the 17th Century ", Centre for the Study of Religion and Chinese Society Chung
Microphone and 600 ohm line conduits shall be mechanically and electrically connected to receptacle boxes and electrically grounded to the audio system ground point.. Lines in
