國立高雄大學電機工程學系碩士班
碩士論文
光纖陀螺儀結合 ZigBee 無線感測系統之研究
The Study of Fiber Gyroscope with ZigBee
Wireless Sensing System
研究生:沈彥廷 撰
指導教授:施明昌 博士
i
ii
光纖陀螺儀結合 ZigBee 無線感測系統之研究
指導教授:施明昌 博士 國立高雄大學電機工程學系 學生:沈彥廷 國立高雄大學電機工程產業碩士班 摘要 ZigBee 為低功耗的無線通訊技術,常應用於環境安全監測,包括溫度、濕度、光 照度等,可以降低感測系統的成本、省電及減少佈線,本論文主要探討結合光纖環形雷 射與光纖陀螺儀角速度的量測,利用環型光纖雷射來提高光纖陀螺儀角速度感測信號的 強度以及穩定性,同時結合 ZigBee 無線技術可以有效增加光纖陀螺儀感測距離以及與 無線網路系統的相容性,實驗中以一電腦控制伺服馬達所組成的旋轉平台來進行光纖陀 螺儀的角速度信號校正,由實驗中驗證 ZigBee 無線光纖陀螺儀可以具有低轉速感測能 力(0.10472rad/s),進行角速度量測,未來可以應用在環境及建築物的即時安全監測。 關鍵字:光纖陀螺儀、ZigBee 無線傳輸技術、角速度感測iii
The Study of Fiber Gyroscope with ZigBee Wireless
Sensing System
Advisor: Dr. Ming Chang, Shih Department of Electrical Engineering
National University of Kaohsiung
Student: Yan Ting, Shen Department of Electrical Engineering
National University of Kaohsiung
Abstract
ZigBee is a wireless communication technology which features low cost network communication and low-power consumption, and is popular used for environmental monitoring, such as temperature, humidity and light intensity. In this thesis, we demonstrated a wireless optical fiber gyroscope system which integrated with ZigBee wireless technology and fiber ring laser system to improve the sensing distance and stability of the sensing signal. A rotating platform dived by a servo motor was applied to calibrate the rotational velocity measurement of the fiber gyroscope. It is proved that the ZigBee optical fiber gyroscope system can achieve low angular velocity sensing(0.10472rad/s) for a wide range of sensing network, and is essential to apply for the environment and building real-time safety monitoring.
Keywords: Optical fiber gyroscope, ZigBee wireless technology, Angular velocity sensing
iv
誌 謝
在國立高雄大學電機工程學系產業碩士班兩年的時間裡,首先要感謝指導教 授施明昌博士,在教授的指導下,除了讓我對光電領域有更進一步的了解,在研 究過程中出現問題時,教授也會細心的教導我們該從哪個方向著手,不管是心態 或是處理事情的方法。此外,要感謝口試委員,藍文厚博士、李孟恩博士撥冗對 本論文的指導,於口試時給予改善的建議與想法,使得論文得以更加完善。 感謝實驗室同學瑋晉、子緯在實驗上的互相努力,以及在空暇的時間裡吃飯 聊天,也讓我在研究所的日子充滿色彩和歡笑。感謝助理瓊萱的幫忙,協助處理 實驗室的許多事情,使我能更專注於論文的研究。 最後要感謝我的父母,在精神方面給予我很大的支持,使我能將心力放在學 業上,才得以順利完成碩士班的學業。v
目錄
論文審定書 ... i 中文摘要 ... ii 英文摘要 ... iii 誌謝 ... iv 目錄 ... v 圖目錄 ... vii 表目錄 ... x 第一章 緒論 ... 1 第二章 基本原理與簡介 ... 2 2-1 光纖陀螺儀 ... 2 2-2 ZigBee 無線傳輸技術簡介 ... 8 2-2-1 IEEE 802.15.4/ZigBee 概論 ... 8 2-2-2 ZigBee 網路架構 ... 9 第三章 實驗架構 ... 11 3-1 光纖陀螺儀結合 ZigBee 無線感測系統架構 ... 11 3-2 光纖陀螺儀實驗設備 ... 13 3-2-1 摻鉺光纖放大器 ... 13 3-2-2 光纖耦合器 ... 13 3-2-3 可調式濾波器 ... 15 3-2-4 極化控制器 ... 15 3-2-5 電光調制器 ... 16 第四章 實驗結果與分析 ... 19 4-1 伺服馬達轉動平台控制 ... 19 4-1-1 參數控制面板 ... 19vi 4-1-2 程式介面與指令 ... 20 4-2 ZigBee 模組 ... 21 4-2-1 ZigBeX 開發環境與程式燒錄介面 ... 21 4-2-2 光纖陀螺儀系統整合 ... 25 4-3 環形雷射光纖陀螺儀輸出訊號 ... 27 4-3-1 光纖陀螺儀輸出訊號量測分析 ... 27 4-3-2 角速度、輸出訊號與強度公式關係 ... 31 第五章 結論 ... 41 參考文獻 ... 42
vii
圖目錄
圖 2-1 桑納克干涉儀示意圖 ... 2 圖 2-2 感測環靜止圖 ... 2 圖 2-3 順時針方向光訊號路徑圖 ... 3 圖 2-4 逆時針方向光訊號路徑圖 ... 4 圖 2-5 輸出振幅 V(t)與角速度理想趨勢圖 ... 7 圖 2-6 ZigBee 架構圖 ... 8 圖 2-7 ZigBee 網路拓樸結構圖 ... 9 圖 3-1 光纖陀螺儀系統示意圖 ... 12 圖 3-2 摻鉺光纖泵激示意圖 ... 13 圖 3-3 光纖纏繞圖 ... 15 圖 3-4 極化控制器示意圖 ... 16 圖 3-5 摻鉺光纖放大器 ... 17 圖 3-6 E-O modulator ... 17 圖 3-7 Tunable Filter ... 17 圖 3-8 訊號產生器 ... 17 圖 3-9 光功率器 ... 17 圖 3-10 Lock-in-Amplifier ... 17 圖 3-11 電子式極化控制器 ... 17 圖 3-12 光纖感測環 ... 17 圖 3-13 馬達驅動器 ... 18 圖 3-14 伺服馬達 ... 18 圖 3-15 示波器 ... 18viii 圖 3-16 轉動平台 ... 18 圖 3-17 ZigBee 感測模組 ... 18 圖 3-18 ZigBee 主控制模組 ... 18 圖 3-19 系統控制用電腦 ... 18 圖 4-1 馬達控制面板圖 ... 19 圖 4-2 馬達程式介面圖 ... 20 圖 4-3 馬達轉動與時間關係圖 ... 20 圖 4-4 主控制模組程式編譯圖 ... 22 圖 4-5 感測模組程式編譯圖 ... 22 圖 4-6 AVR Studio 連接燒錄器圖 ... 23 圖 4-7 AVR Studio 燒錄程式介面圖 ... 23 圖 4-8 AVR ISP 燒錄模組正面圖 ... 24 圖 4-9 AVR ISP 燒錄模組背面圖 ... 24 圖 4-10 JAVA 程式編譯圖 ... 25 圖 4-11 JAVA 程式介面圖 ... 26 圖 4-12 馬達轉速 1rpm 與輸出振幅關係圖 ... 27 圖 4-13 馬達轉速 2rpm 與輸出振幅關係圖 ... 28 圖 4-14 馬達轉速 3rpm 與輸出振幅關係圖 ... 28 圖 4-15 馬達轉速 4rpm 與輸出振幅關係圖 ... 29 圖 4-16 馬達轉速 5rpm 與輸出振幅關係圖 ... 29 圖 4-17 轉動角速度與輸出振幅關係圖 ... 30 圖 4-18 角速度與光纖陀螺儀輸出振幅改變關係圖 ... 31 圖 4-19 實驗數據與強度公式關係圖 ... 32
ix 圖 4-20 鎖相放大器 0 度與強度公式關係圖 ... 36 圖 4-21 鎖相放大器 30 度與強度公式關係圖 ... 36 圖 4-22 鎖相放大器 60 度與強度公式關係圖 ... 37 圖 4-23 鎖相放大器 90 度與強度公式關係圖 ... 37 圖 4-24 鎖相放大器 120 度與強度公式關係圖 ... 38 圖 4-25 鎖相放大器 150 度與強度公式關係圖 ... 38 圖 4-26 鎖相放大器 180 度與強度公式關係圖 ... 39
x
表目錄
表 2-1 Wi-Fi、ZigBee 及 Bluetooth 比較表 ... 10 表 4-1 轉動角速度、角速度與輸出振幅關係表 ... 30 表 4-2 光纖陀螺儀原理模型建立表 ... 33 表 4-3 實驗數據與公式計算理想值關係表 ... 35 表 4-4 改變鎖相放大器相位與強度公式關係表 ... 391
第一章
緒論
自從 1852 年法國科學家傅科(J.B.L. Foucault)製作了第一套陀螺儀。陀螺儀 (Gyroscope)可測量地球的自轉 [1],成為軍事、航太與導航之關鍵技術。之後,陀 螺儀技術不斷改良,1976 年美國猶他大學的 V.Vali 和 R.W.Shorthill 製造出第一個 光纖陀螺儀(Fiber Optic Gyroscope) [2]。光纖陀螺儀是利用桑納克效應(Sagnac Effect),當感測環受到角速度變化時,使得光纖陀螺儀中兩道光束的光程差造成兩 光束之干涉條紋強度變化。相較於傳統的機械式陀螺儀,光纖陀螺儀沒有機械部 件,在運轉時不會受到摩擦力的影響,所以得到量測的值誤差比較小,其可靠性 佳。此外,光纖陀螺儀還具有結構簡單、低損耗、高敏感度等優點 [3] 近年來,隨著科技的進步,無線感測網路的應用越來越廣泛,無線感測網路 為目前環境監測的最熱門技術,利用感測器來採集環境的溫度、濕度、照光度等, 再透過無線的方式將感測資料傳輸至遠端資料處理中心。無線感測網路的系統架 構下,感測器具有體積小、省電、位置可隨意擺放,無須佈線等優點。另外,為 了解決傳輸距離的問題,感測器可以藉由多重跳躍代傳機制(multiple-hop relay) 建立網路路由(routing)的方法將感測資料經由多個感測器組成的路徑傳回主控制 端 [4]。 ZigBee 是一種短距離傳輸及具低功耗的無線通訊協定標準,1998 年由美國 Honeywell 公司提出一種能夠自我組網(Self Organization)的無線點對點(ad-hoc)的 網路標準,於 2001 年成立 ZigBee Alliance 並向電機電子工程師學會(IEEE)提案納 入 IEEE 802.15.4 標準規範之中,西元 2005 年正式發佈 ZigBee 1.0 [5]。ZigBee 在 同一條網路上可允許近 65000 個裝置節點運作,此外,ZigBee 無線模組也結合睡 眠功能,利用一般鹼性電池兩顆約 3v,可使感測器模組運作一年的時間。
本論文將結合光纖環形雷射陀螺儀與 ZigBee 無線通訊技術來達到環境轉動角 速度的監測並提昇其陀螺儀的信號檢測性能之研究。
2
第二章
基本原理與簡介
2-1 光纖陀螺儀
光纖陀螺儀的原理是基於桑納克效應(Sagnac Effect),於一環形光迴路中順/逆 兩光束因環的自轉速度產生干涉。如圖 2-1,光源經2 × 2耦合器輸入至光纖陀螺儀 迴路,陀螺儀兩道光訊號以順時針和逆時針方向在光纖感測環中傳遞,當環沒有 自轉時,此系統相對於慣性空間是靜止的,兩道光於光纖感測環中,所走的路徑 等長,因此兩道光的相位差為零;當系統相對於慣性空間中,有一角速度 Ω 旋轉 時,因光程差不同,產生干涉 [6] [7]經耦合器輸出到光檢測器。 圖 2-1 桑納克干涉儀示意圖 如圖2-2說明若感測環無自轉時,感測環內兩道光行進的路徑相等,皆為2πR 的距離,即相位差為零,此時交點在位置P上。 圖 2-2 感測環靜止圖3 光纖感測環半徑長度:R 光在真空中的速率: C0 光速繞行一圈的時間:T 當感測環靜止時,順時針方向與逆時針方向的光訊號繞行一圈距離為: L = 2πR = C0T (2-1-1) 如圖2-3,若感測環以一角速度Ω以順時針方向旋轉時,此時在感測環內行進 的兩道光的路徑則產生差異。其中順時針方向的光訊號(相對於陀螺儀的移動方向), 原本跟逆時針方向的光訊號在P的位置上交會變成在P´位置交會,此時路徑會比原 本多了P位置到P´位置的距離。 圖 2-3 順時針方向光訊號路徑圖 順時針方向光訊號行進距離為: L′= 2πR + RΩT′ = C 0T′ (2-1-2) 經整理後,可得: T′ = 2πR (C⁄ 0− RΩ) (2-1-3)
4 P位置至P´位置的時間: T′ P位置至P´位置: RΩT′ 反之,如圖2-4,逆時針方向的光訊號的路徑則會比原本的少了P位置到P´位置 的距離。 圖 2-4 逆時針方向光訊號路徑圖 逆時針的光行進的距離為 L′′ = 2πR − RΩT′′ = C 0T′′ (2-1-4) 經整理後,可得: T′′ = 2πR (C 0+ RΩ) ⁄ (2-1-5) P位置至P´位置的時間: T′′ 由式(2-1-2)和式(2-1-4),可得知兩道光訊號所產生的光程差為: ∆L = L′− L′′ = C 0(T′− T′′) (2-1-6) 將式(2-1-3)和式(2-1-5)代入上式(2-1-6),可得: T′− T′′ = [2πR (C⁄ 0− RΩ)] − [2πR (C⁄ 0+ RΩ)] (2-1-7)
5 經整理後,可得: T′− T′′ = 4πR2Ω (C02− R2Ω2) ⁄ (2-1-8) 由於C0>>RΩ,因此可以將式(2-1-8)改為: T′− T′′ = 4πR2Ω C02 ⁄ (2-1-9) 將式(2-1-9)代入式(2-1-6),可得: ∆L = 4πR2Ω C 0 ⁄ (2-1-10) 兩道光訊號的相位差Δφ和光源波長λ關係為: Δφ= 2π(ΔL λ⁄ ) (2-1-11) 將式(2-1-10)代入式(2-1-11),經整理後,可得: Δφ = 8π2R2Ω λC 0 ⁄ (2-1-12) 由於光在介質中行進的速度比真空中慢,相同頻率的光波在介質中比在真空中的 波長短,因此考慮光纖折射係數neff ,可得: Δφ = 8π2R2Ω [(nλ eff)( C0 neff)] ⁄ (2-1-13) 經整理後,可得: Δφ = 8π2R2Ωneff 2 λC0 ⁄ (2-1-14) 若環形迴路為N匝,須乘上匝數N,可得: Δφ = 8π2R2Ωneff 2N λC0 ⁄ (2-1-15)
6 由式(2-1-15),可得到相位差Δφ與角速度 Ω 成正比關係,也與光纖感測環半徑長 度成正比關係。當光纖感測環受到環境角速度的影響時,使相位差發生改變,再 將干涉條紋光強度轉換成電壓訊號 [8]。 光纖陀螺儀的干涉條紋之光強度變化如下 E0′ = 𝐸 0cos(𝑘𝑥 − 𝑤𝑡′) (順方向光場) (2-1-16) E0′′ = 𝐸0cos(𝑘𝑥 − 𝑤𝑡′′) (逆方向光場) (2-1-17) 干涉光強度為 I = (𝐸0′+ 𝐸0′′)2 = (𝐸0′)2+ (𝐸0′′)2+ 2(𝐸0′)(𝐸0′′) (2-1-18) 將式(2-1-18)展開
I = 𝐸02cos2(𝑘𝑥 − 𝑤𝑡′) + 𝐸02cos2(𝑘𝑥 − 𝑤𝑡′′)+2𝐸02cos(𝑘𝑥 − 𝑤𝑡′) cos(𝑘𝑥 − 𝑤𝑡′′)
(2-1-19) 將式(2-1-19)取平均時間: ∫ Idt0T T = ∫ 𝐸0T 02cos2(𝑘𝑥−𝑤𝑡′)𝑑𝑡 T + ∫ 𝐸0T 02cos2(𝑘𝑥−𝑤𝑡′′)𝑑𝑡 T +2∫ 𝐸02cos(𝑘𝑥−𝑤𝑡′) cos(𝑘𝑥−𝑤𝑡′′) T T 0 𝑑𝑡 (2-1-20) 將光程差 L 代入 x ∫ Idt0T T = ∫ 𝐸0T 02cos2(𝑘L′−𝑤𝑡′)𝑑𝑡 T + ∫ 𝐸0T 02cos2(𝑘L′′−𝑤𝑡′′)𝑑𝑡 T +2∫ 𝐸02cos(𝑘L′−𝑤𝑡′) cos(𝑘L′′−𝑤𝑡′′) T 𝑑𝑡 T 0 (2-1-21) 經整理後,可得: I =12𝐸02+12𝐸02+ 𝐸02cos[k(L′− L′′)] (2-1-22) I = 𝐸02+ 𝐸02cos [k(L′− L′′)] (2-1-23)
7
因為光強度為電場強度的平方,k=2π λ⁄ ,所以由式(2-1-23)可得強度公式為:
I(t) = I[1 + Cos(∆φ + φ0)] (2-1-24)
陀螺儀未轉動時初始相位: φ0 在實驗中我們是利用光功率計將干涉光強度訊號轉成電訊號,再藉由鎖相放大器 將其電訊號放大,所以可得如圖2-5為輸出振幅V(t)與角速度理想趨勢圖,故再將 我們的公式整理可得: V(t) = I ∙ r ∙ F[1 + Cos(∆φ + φ0)] (2-1-25) 光訊號轉換電訊號:r 鎖相放大器放大倍率:F 整理後,可得: V(t) = V[1 + Cos(∆φ + φ0)] (2-1-26) 其中Δφ = 8π2R2Ωneff 2N λC0 ⁄ 圖 2-5 輸出振幅 V(t)與角速度理想趨勢圖
8
2-2 ZigBee 無線傳輸技術簡介
2-2-1 IEEE 802.15.4/ZigBee 概論
ZigBee主要是由ZigBee Alliance組織所制定的無線網路協定,特色有低速、低 功耗、低成本、支援大量網路節點、應用簡單等,在協定架構中,其中底層包括 媒體存取層與實體層是以IEEE 802.15.14 標準規範所制定,網路層、安全管理層與 應用介面則由ZigBee Alliance制定 [9]。 圖 2-6 ZigBee 架構圖如圖 2-6 為 ZigBee 架構圖,其中實體層(Physical Layer,PHY) 負責的工作為 管理無線收發器、選擇通道以及處理無線傳輸的技術等,媒體層(Media Access Control Layer,MAC)主要是提供資料並與上層網路層做溝通,在媒體層以上依序 增加網路層(Network Layer,NWK) 、應用支援子層(Application Support Sublayer, 簡稱 APS)、應用層(Application Layer,簡稱 APL)。架構的核心之一是在網路層, 主要功能為控制節點加入或離開網路、尋找路由,以及傳送或接收資料封包 [10]。
9
2-2-2 ZigBee 網路架構
在ZigBee網路架構內可分為兩種網路裝置:全功能裝置(Full Function Device,
FFD) 和精簡功能裝置(Reduced Function Device,RFD),其中協調器(Coordinator)
與路由器(Router)屬於全功能裝置,可與網路內所有裝置作通信。終端裝置(End Device)則屬於精簡功能裝置,僅能與協調器作通訊。在ZigBee網路拓樸架構內, 通常只能存在一個協調器,並與數個路由器和終端裝置所組成。 圖 2-7 ZigBee 網路拓樸結構圖 如圖2-7,網路拓樸可分為:星狀(Star)結構、樹狀(Tree)結構、網狀(Mesh)結構, 其中星狀結構由一個協調器所組成,負責建立與管理整個網路架構,其它的終端 裝置則直接與協調器做通訊。網狀結構是由一個協調器與數個全功能裝置所組成 在,具有高可靠性,一旦某一條路徑故障時,便可透過其它路徑做通訊。最後, 樹狀結構裡終端裝置則是利用路由器與協調器做溝通,常應用於及長距離的傳輸, 但在傳輸時,會使資料產生延遲的狀況 [11]。
10 ZigBee 具有低耗電、雙向傳輸、低成本、高擴充性等特性,當有資料傳送時 則可立即傳送,並進行節點間雙向確認,可有效提高資訊傳輸之可靠度,滿足現 今智慧家庭設備的需求標準,如表 2-1 為 Wi-Fi、ZigBee 及 Bluetooth 比較表 [12]。 低成本:節點所需儲存空間小,相對的降低晶片成本,此外 ZigBee 協議也提供免 專利費。 低消耗功率:每個感測節點僅需要一般鹼性電池兩顆約 3v,搭配本身的睡眠模式, 可工作約 1 年的時間。 近距離:工作範圍約 10~100 公尺,可藉由路由器的擴充及增強 RF 發射功率來拉長 傳輸距離。 高擴充性:可採用星狀、網狀及樹狀網路拓樸結構,最多可使約 65000 個節點在同 一個網路架構內。 高響應速度:從睡眠模式進入到工作模式僅需 15ms,裝置節點連接至網路只需 30ms,可發現高響應速度也能有效節省電源。 自組網路能力:當節點與節點之間失去通訊能力,可以透過其它路徑做通訊。
ZigBee Wi-Fi Bluetooth
成本 低 高 中 消耗功率 低 高 中 傳輸距離 30~100m 100~300m 10m 網路節點數 65535 32 7 響應速度 30ms 3s 10s 表 2-1 Wi-Fi、ZigBee 及 Bluetooth 比較表
11
第三章
實驗架構
3-1 光纖陀螺儀結合 ZigBee 無線感測系統架構
此系統架構由摻鉺光纖放大器(EDFA)、可調式濾波器(Tunable Filter)及電光調 制器(Electro-Optical modulator)組成一環型光纖雷射光源,在 EDFA 的輸出端 (Output)連接電光調制器,再由訊號產生器(Function Generator:SFG-830)控制電光 調制器,電光調制器的輸出端連接一組光纖耦合器(Coupler)(60/40),耦合器的 60% 輸出端接上可調式濾波器,光訊號經由濾波器再輸出至 EDFA 的輸入端,再經過 摻鉺光纖造成居量反轉,使光訊號放大,此時完成環型光纖雷射。光纖耦合器 (Coupler)(60/40)的 40%輸出端接上一個 2×2 的光纖耦合器(Coupler)((50/50),將光 分成兩道光訊號,其中一端進入光纖感測環(Fiber Ring),另一端則輸入至電子式 極化控制器(Polarization Controller:HP11896A),主要是調制環型雷射出來的光訊 號進入到光纖感測環(Fiber Ring)的極化方向,於極化控制器(Polarization Controller) 的輸出端在接上感測環的另一端,2×2 耦合器(Coupler) (50/50)的另一端則連接光功 率計(Power Meter:Q8221),光功率計可以使光纖感測環輸出的光訊號轉換成電訊 號,在將其訊號輸入至鎖相放大器(Lock-in Amplifier:SR530),此時電訊號在雜訊 中放大並鎖住相位,將經由鎖相放大器的訊號輸入至示波器及 ZigBee 感測模組。 為了達到測試陀螺儀的轉動特性檢測,將光纖陀螺儀感測環固定在一旋轉平 台,旋轉平台主要是由伺服馬達構成的機構,在電腦端利用 MITSUBISHI 開發的 程式軟體經由 MITSUBISHI MR-J2S-40A 驅動器對伺服馬達下達程式指令,使平台 轉動,當旋轉平台開始轉動時,感測環內光訊號在光纖感測環中產生干涉,此時 示波器上會顯示出陀螺儀轉動的訊號,ZigBee 感測模組將角速度量測值運算後組 成封包,並將其封包藉由 ZigBee 無線傳輸傳送至電腦的主控制模組,再由電腦將 感測資料顯現出來,完成此光纖環形陀螺儀結合 ZigBee 無線感測系統。
12
13
3-2 光纖陀螺儀實驗設備
3-2-1 摻鉺光纖放大器
摻鉺光纖放大器(EDFA:Erbium Doped Fiber Amplifier)具有光和增益,主要是 將鉺離子摻入光纖的纖芯中,作為增益介質,以達成將入射光訊號激發放大的效 果。摻鉺光纖放大的作用可以用一個三階原子模型來解釋 [13],當原子從基態躍 遷至激發態時,又迅速地衰減至亞穩態,由於亞穩態的生命週期較激發態的生命 週期長,使原子累積於亞穩態,當原子衰減至基態時將會產生强度較高的光子出 來,我們稱此過程為居量反置(Population Inversion)。當居量反置時所造成的受激 輻射速率大於吸收速率時,就會產生光增益效果。如圖 3-2 為摻鉺光纖泵激示意 圖。 圖 3-2 摻鉺光纖泵激示意圖
3-2-2 光纖耦合器
光纖耦合器原理為利用傳播速率的不同而達到分光效果 [14],製造方式有光 學濾片式、熔和式與波導式,實驗中所使用的耦合器為熔和式,利用氫氧焰加熱 在兩條單膜裸光纖,在加熱過程中,觀察兩光纖出口端的光強度並依所需的耦合 比例適當延伸光纖熔接的長度,光纖熔接的長度與兩傳播模態的傳播係數差決定 其光纖耦合係數,在不同的光膜態中會有不同的耦合率,通常會使用單一膜態的 光纖,以便精準的控制所需光纖耦合器的耦合比例。14
光纖耦合器製作:
首先,開啟儀器電源與控制軟體,調整儀器的位置,使用的為軟體 FCMW-2000, 以下為相關的參數設定: (1) Flow/heat:設定氫氣火焰的強度以及速率 (2) Pulling Setting:設定載具位置 (3) Torch Setting:調整火源位置 (4) Package Setting:封裝載具設定 (5) PD Calibration:雷射波長設定 (6) Coupling Ratio:耦合比設定 軟體參數設定完成後,接上光纖接頭,用鑽石刀切去光纖接觸端,使接觸端 平整。接好接頭的光纖取一段作為耦合的區域,其剝離的長度不能超過兩載具間 的寬度,此時,打開儀器的光纖吸附鈕,將光纖放置上去,須留意有無放直或是 否放在同一邊,剝離的區域則置在中間,在剝離區域的後端,再把光纖剪斷。重 複以上步驟,將處理好的接頭接上耦合器上的機台上端接頭。用好後將光纖真空 吸持並將兩光纖纏二至四圈,如圖 3-3 為光纖纏繞圖。當光纖纏好後,可以進行加 熱耦合,載入氫氣利用點火器點燃氫氧焰,蓋上防護罩,直到達到耦合比設定比 例,即可關閉氫氧焰,再將石英套管放置載具上進行封裝,耦合兩端用黏著膠加 以固定,之後再用不鏽鋼管將石管套住,並用黏著膠固定於兩端,即可製作出我 們所需的光纖耦合器(Coupler)15 圖 3-3 光纖纏繞圖 [15]
3-2-3 可調式濾波器
光纖濾波器是用來進行波長選擇的儀器,它可以從眾多的波長中挑選出所需 的波長,而除此波長以外的光會被過濾掉,系統中所使用的濾波器掃描波長頻段 為1310nm~1610nm,可透過改變電源供應器的電壓去鎖定我們系統的波長 [16]。 將可調式濾波器放置於系統中環形光纖雷射架構中可達成穩定及可調的雷射輸 出。3-2-4 極化控制器
光極化在光纖中行進時,容易受到光纖雙折射的性質影響,使光波偏振改變, 因此影響光訊號的强度,實驗中使用電子式極化控制器來改善偏振對陀螺儀光干 涉訊號強度的影響。如圖3-4為極化控制器示意圖。16 圖 3-4 極化控制器示意圖 [17]
3-2-5 電光調制器
介質的介電常數與晶體中的電荷分佈相關,在晶體上施加電場之後,將引起 束縛電荷的重新分佈,此時離子晶格的產生微小形變,引起介電常數的變化,則 改變晶體折射率,隨外加電場的不同,會造成光束行進的相位延遲(phase retardation),此時相位差的變化取決於外加電壓,只要改變電壓,就能使相位成比 例地變化 [18]。 其方程式為: n = n0+ aE (3-2-1) ∆n = n − n0= aE (3-2-2) 未加電場時的折射率:n0 常數:a 由式(3-2-2)可得知, aE引起的折射率變化為一次電光效應(Pockels effect)。17 以下為本論文中,所使用的儀器圖: 圖 3-5 摻鉺光纖放大器 圖 3-6 E-O modulator 圖 3-7 Tunable Filter 圖 3-8 訊號產生器 圖 3-9 光功率器 圖 3-10 Lock-in-Amplifier 圖 3-11 電子式極化控制器 圖 3-12 光纖感測環
18
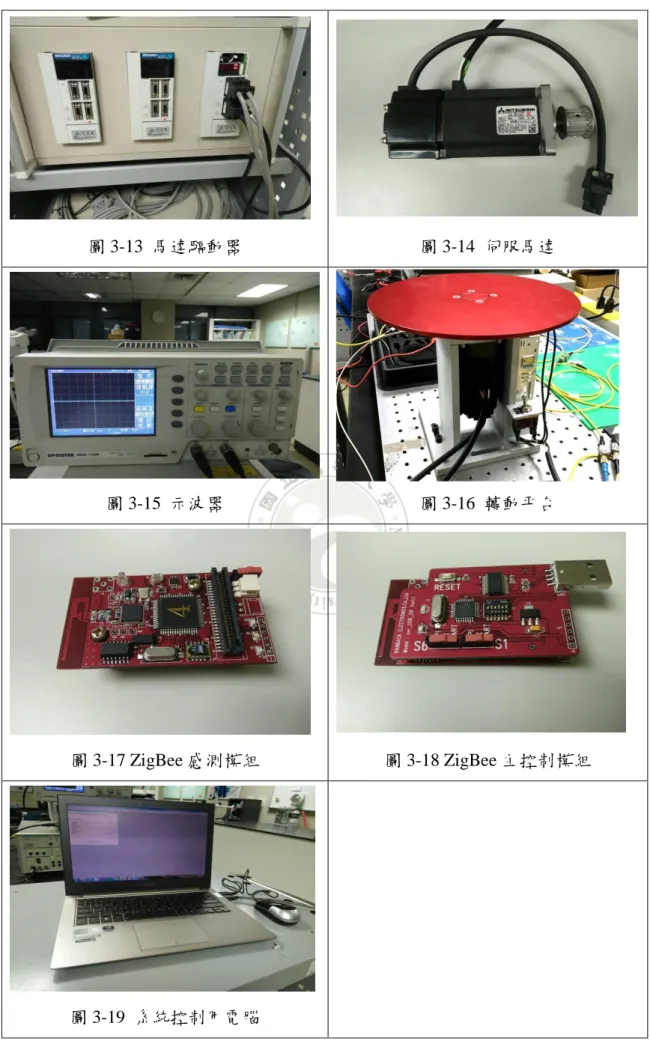
圖 3-13 馬達驅動器 圖 3-14 伺服馬達
圖 3-15 示波器 圖 3-16 轉動平台
圖 3-17 ZigBee 感測模組 圖 3-18 ZigBee 主控制模組
19
第四章
實驗結果與分析
4-1 伺服馬達轉動平台控制
在實驗中,我們利用 MITSUBISHI MELSERVO-J2-SUPER 伺服馬達整合轉動 平台來做角速度的量測,我們可以藉由程式控制介面改變馬達轉速速度已達到量 測各種轉速的輸出訊號。4-1-1 參數控制面板
本實驗所使用的伺服馬達參數控制器面板,面板是利用 5 位數 7 段 LED 顯示 伺服器目前狀態,LED 顯示部下面為操作按鍵,主要為狀態顯示、診斷、異常、 參數 Point table 操作,由左至右按鍵依序為模式變更(MODE)鍵、UP 鍵、DOWN 鍵、設定資料(SET)鍵,通信用接頭與 RS232 電纜線連接,利用 RS232 轉 USB 連 接筆記型電腦來輸出指令,檢出器接頭連接伺服器馬達檢出器,主回路端子台則 為輸入伺服馬達電源、連接控制回路電源、接地端子 [19]。伺服馬達速度增益、 轉矩增益、加速時間等各種參數藉由此控制面板作設定,依據負載的重量與大小 下去作調整參數,才能得到馬達最佳化控制,此時由我們系統量測的輸出訊號才 能穩定去作特性分析。如圖 4-1 為馬達控制面板(由左至右依序為馬達啟動電源、 連接電腦、運作時的面板顯示狀態) 圖 4-1 馬達控制面板圖20
4-1-2 程式介面與指令
在實驗中控制馬達帶動旋轉平台旋轉使用 SETUP161E Mitsubishi Servo Configuration Software,此軟體主要控制我們的馬達驅動器並下達相關程式指令使 伺服馬達動作。如圖 4-2,首先開啟軟體,並選擇 Demo Operation Mode 模式,並 開始執行相關指令: TIMES(1):馬達運轉一周期 SPN(5):馬達轉速 5 轉 MOV(32768):馬達反轉 90 度 TIM(1):到達定點停止 1 秒 MOV(-32768):馬達正轉 90 度 STOP:馬達停止運轉 圖 4-2 馬達程式介面圖 圖 4-3 馬達轉動與時間關係圖
21
4-2 ZigBee 模組
在實驗中,我們使用的 ZigBee 無線模組是由 HANBACK ELECTRONICS 所開 發的 ZigBeX Mote,此感測模組主要是由微控制器(ATmega128L)、無線通訊晶片 (CC2420)、感測器與天線等組成。其中 ATmega128L 為一顆 8 位元微控制器,內 置 128kb 快閃記憶體及 4kb 的 SRAM,也支援 6 種睡眠模式(Powe save、Power down…等),並且提供 8 個 10 位元的 ADC 通道讓使用者開發,無線通訊晶片則使 用 CC2420,採用 IEEE 802.15.14 標準規範的 2.4GHz 波段,天線部分則使用 2.4GHz 的 PCB 天線,感測器部分則包括溫濕度、光照度等感測器。
4-2-1 ZigBeX 開發環境與程式燒錄介面
ZigBeX模組的作業系統TinyOS是在Linux環境中執行的,Cygwin是一套類比 於Linux平台的類比程式,在Windows系統中我們可以使用Cygwin程式去執行 TinyOS,其中TinyOS由加州大學的伯利克分校研發出來的,為一個開放原始碼的 嵌入式作業系統, 在無線感測網路系統能有效的管理感測器的相關工作,透過一 個基地台控制各個感測器節點,並處理每個感測器節點所採集到的資料。 (1) Cygwin 開發環境 在實驗中我們 ZigBex 模組的程式是在 Cygwin 程式環境下做編譯以及開發, 如圖 4- 4,首先,先在 Cygwin 程式介面下找到我們要編譯程式的資料夾(TOSBase), 然後再做重新編譯,此時,主控制模組的程式就編譯成燒錄檔,再透過 AVR Studio 燒錄程式將我們所編譯成功的程式燒錄至我們的 ZigBex 模組裡的 ATmega128L 微 控制器。22 圖 4-4 主控制模組程式編譯圖 如圖 4-5 為感測模組的程式編譯,首先,先在 Cygwin 程式介面下找到我們要 編譯程式的資料夾(OscilloscopeRF),然後再做重新編譯,此時,感測模組的程式 就編譯成燒錄檔,再透過 AVR Studio 燒錄程式將我們所編譯成功的程式燒錄至我 們的 ZigBex 模組裡的 ATmega128L 微控制器。 圖 4-5 感測模組程式編譯圖
23
(2) AVR Studio 程式燒錄介面與燒錄器
開啟 AVR Studio 燒錄程式,如圖 4-6,先在介面左上角點選連接我們的燒錄 控制器,此時程式便會偵測是否連接成功,當連接上我們的模組後會彈出燒錄視 窗,如圖 4-7,在 Input HEX File 裡選擇我們在 Cygwin 開發環境編譯完成的燒錄 檔,再藉由 AVR ISP 燒錄器將程式燒錄至我們的感測或主控制模組。
圖 4-6 AVR Studio 連接燒錄器圖
24
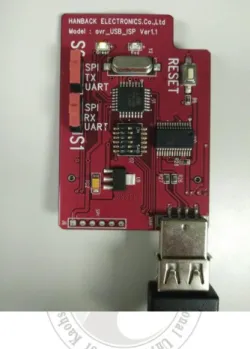
實驗中所使用的燒錄器是由 HANBACK ELECTRONICS 所設計的 AVR ISP 燒 錄模組,其中模組為雙面板,主要是透過 USB 連接至我們的電腦。如圖 4-8,當 開啟 AVR Studio 程式介面時需要先將燒錄器正面的 S1 及 S6 開關切換至 SPI,此 時 AVR Studio 程式便會偵測到我們的燒錄器。如圖 4-9,在燒錄器背端有一排 50PIN 的插腳,主要是用來連接感測模組及主控制模組 [20]。
圖 4-8 AVR ISP 燒錄模組正面圖
25
4-2-2 光纖陀螺儀系統整合
在我們系統架構下將經由鎖相放大器的光纖陀螺儀輸出訊號輸入至 ZigBee 感 測模組的 ADC PORT,ATmega128L 的 ADC PORT 具有 10 位元的精確度、13~360us 的轉換時間及提供 0~Vcc 的輸入電壓範圍。 在程式裡我們是利用感測模組的 ADC 3 腳位,來輸入至 ATmega128L 微控制器。
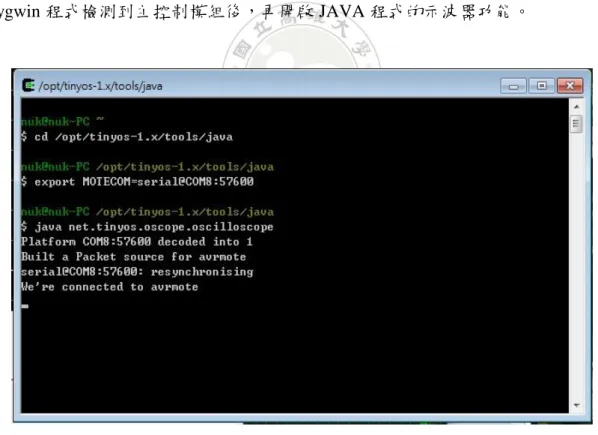
當感測模組的 ADC 腳位採取到我們所需要的感測資料時,會將資料整理成封 包藉由無線傳輸傳送至我們的主控制模組,主控制模組是透過 USB 連接至我們的 電腦,此時我們利用 JAVA 程式將我們的感測資料以示波器方式呈現在電腦屏幕 上。如圖 4-10,JAVA 程式介面需要在 Cygwin 開發環境下啟動,先連接我們的 JAVA 程式檔案,接著設定我們的連接阜,在實驗中我們所使用的連接阜為 COM 8,當 Cygwin 程式檢測到主控制模組後,再開啟 JAVA 程式的示波器功能。
26
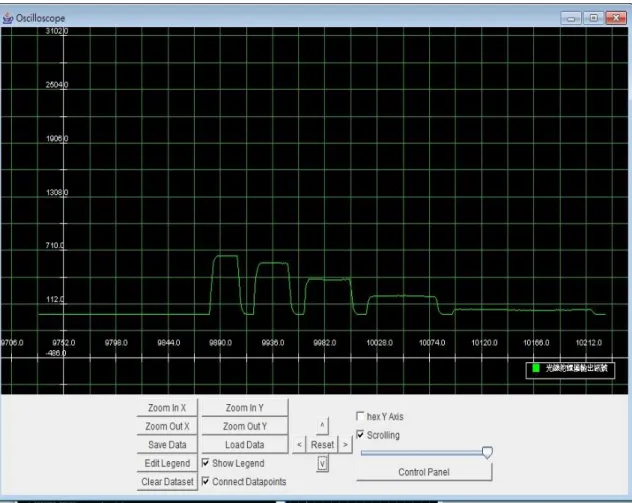
如圖 4-11 為量測光纖陀螺儀轉動輸出訊號的程式介面,由圖形可得轉速不同 所量測到的輸出振幅也有所差異,程式介面也提供儲存數據功能,便可將所量測 到的資料做後續的分析。
27
4-3 環形雷射光纖陀螺儀輸出訊號
4-3-1 光纖陀螺儀輸出訊號量測分析
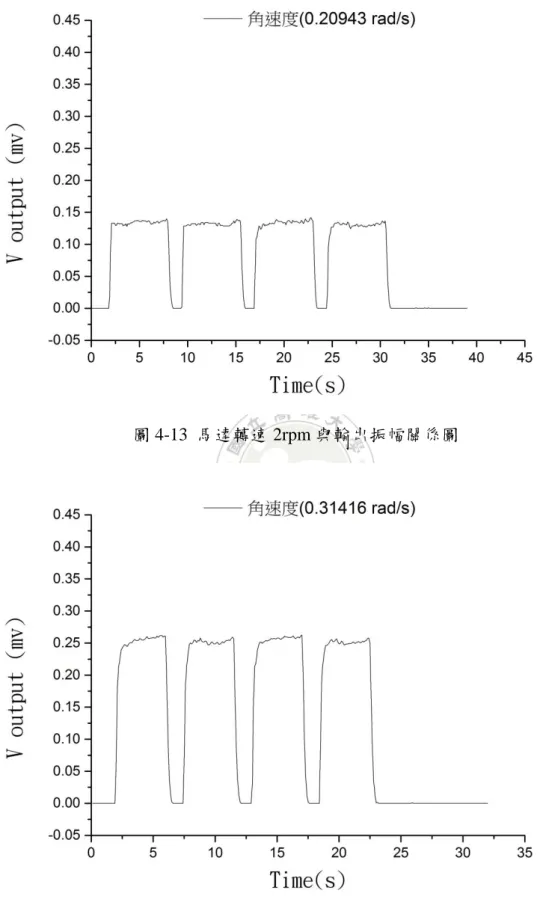
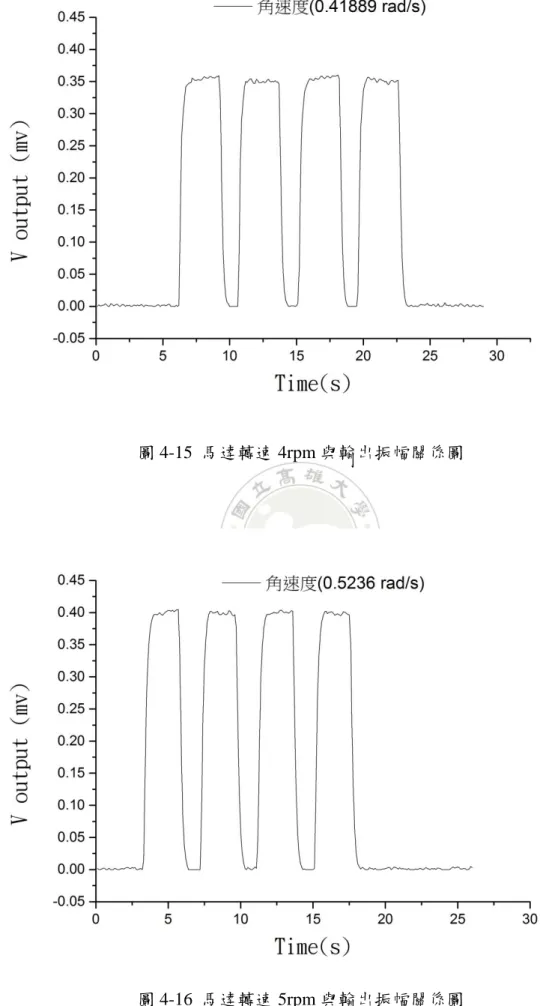
在系統架構中,我們利用鎖相放大器積分的效果可以有效的量測角速度與訊 號強度的關係。其中系統中的信號產生器為 45kHz、可調式濾波器的調製電壓為 4.5V、電光調制器的調制電壓為 2.0V、鎖相放大器的參數 Sensivity 為 2mv 及相位 為 0 度。其中在實驗中我們將馬達轉速設定為 1rpm、2rpm、3rpm、4rpm、5rpm, 以正轉 90 度及反轉 90 度下去做訊號的量測,先反轉 90 度到達定點後停留 1 秒, 之後再正轉 90 度回到起始點,來回兩個週期,以探討光纖陀螺儀系統的穩定性。 圖 4-12 為馬達轉速 1rpm 與輸出振幅關係圖。圖 4-13 為馬達轉速 2rpm 與輸出振幅 關係圖。圖 4-14 為馬達轉速 3rpm 與輸出振幅關係圖。圖 4-15 為馬達轉速 4rpm 與 輸出振幅關係圖。圖 4-16 為馬達轉速 5rpm 與輸出振幅關係圖。 圖 4-12 馬達轉速 1rpm 與輸出振幅關係圖28
圖 4-13 馬達轉速 2rpm 與輸出振幅關係圖
29
圖 4-15 馬達轉速 4rpm 與輸出振幅關係圖
30 在光纖陀螺儀原理中可得改變光陀螺儀的轉動速度與輸出訊號成正向關係, 如圖 4-17,當增加馬達轉時,所得到的輸出振幅值也會提高。從轉速與輸出振幅 關係圖可得知透過我們環形雷射架構能穩定地提高光輸出能量,並藉由電子式極 化控制器可改善偏振對干涉光強度的影響。 圖 4-17 轉動角速度與輸出振幅關係圖 表 4-1 轉動角速度、角速度與輸出振幅關係表 馬達轉速 陀螺儀角速度 輸出振幅 1rpm 0.10472rad/s 0.034mv 2rpm 0.20944rad/s 0.133mv 3rpm 0.31416rad/s 0.258mv 4rpm 0.41888rad/s 0.354mv 5rpm 0.5236rad/s 0.403mv
31
4-3-2 角速度、輸出訊號與強度公式關係
如圖 4-18 為角速度(Angular velocity)與光纖陀螺儀輸出振幅改變關係圖,當光 纖陀螺儀感測到的角速度增加時,所量測到的輸出振幅會變大,以下將利用陀螺 儀原理中的強度公式去分析前一節量測到的結果。 圖 4-18 角速度與光纖陀螺儀輸出振幅改變關係圖 (1)Curve-Fitting Method(曲線擬合法) 根據光纖陀螺儀強度公式 V(t) = V[1 + Cos(∆φ + φ0)] ,在光纖感測環還沒感 測到角速度時,I為系統振福初始值、φ0為初始相位差、Δφ = 8π2R2Ωneff 2N λC 0 ⁄ , 其中感測環半徑長度 R 為 10cm、波長λ為 1531nm、光在真空中的速率C0為 3 × 108m/s、光纖折射率為 1.448。32 將Δφ代入強度公式,可得: V(t) = V {1 + Cos [(8π2R2Ωneff 2N λC0 ) + φ0]} (4-2-1) 將已知條件入可得: V(t) = V {1 + Cos [((1531×108π2(0.1)2−9Ω(1.448))(3×1028N)) + φ0]}
(4-2-2) 將式子整理,可得: V(t) = V {1 + Cos [((1.6555)×Ω×N459.3 ) + φ0]} (4-2-3) 接著利用 Origin9 軟體來分析強度公式與我們利用光纖陀螺儀系統所量測到的 增加角速度與輸出振幅改變關係。在軟體中我們使用 curve-fitting method(曲線擬合 法),曲線擬合法是一種把利用實驗所得到的數據透過數學方法來代入運算式的表 示方式。如圖 4-19 為實驗數據與強度公式關係圖。 圖 4-19 實驗數據與強度公式關係圖
33 由圖 4-19 可發現利用光纖陀螺儀結合 ZigBee 無線感測系統所量測到的實驗數 據與強度公式的曲線相當吻合,根據馬達轉速所量測到的輸出振福與實際角速度 代入公式所得到的輸出訊號誤差值極小。如表 4-2 為光纖陀螺儀原理建立模型。其 中參數設定如下: 輸出強度振幅值:V(t)=y 強度振幅初始值:V=I 光纖感測環匝數:N 陀螺儀為轉動時初始相位: φ0=A 光纖陀螺儀系統角速度: Ω=x 根據 Origin9 軟體分析結果可以得知初始相位:φ0=3.14774,約為 180 度、N 約為 1632 匝、振幅初始值為 0.2012mv。 表 4-2 光纖陀螺儀原理模型建立表
34 (2)強度公式與系統實驗數據 將利用 Origin9 軟體所求得的值代入(4-2-3)式,可得: V(t) = 0.2012 {1 + Cos [((1.6555)×Ω×1632459.3 ) + 3.14774]} (4-2-4) 經整理後,可得: V(t) = 0.2012{1 + Cos[(5.8824 × Ω) + 3.14774]} (4-2-5) 將角速度Ω設定為馬達轉速為 1rpm(角速度=0.10472rad/s)代入式(4-2-5),可得: V(t) = 0.2012[1 + Cos(3.7637)] (4-2-6) 在公式裡,φ值的單位為 rad,所以得到的值需轉換成角度: 3.7637×180° 𝜋 = 215.65° (4-2-7) 再將所求得的角度代回公式,可得: V(t) = 0.2012[1 + Cos(215.65°)] (4-2-8) 經整理後,可得: V(t) = 0.2012[1 + (−0.8126)] (4-2-9) 計算後可得:V(t)=0.038mv,與實驗所量測到的輸出振幅值誤差值為 0.004mv, 接著再將馬達轉速 2rpm(角速度=0.20944rad/s)、3rpm(角速度=0.31416rad/s)、 4rpm(角速度=0.41888rad/s)、5rpm(角速度=0.5236rad/s)代入式(4-2-5)進行分析。如 表 4-3 為實驗數據與公式計算理想值。
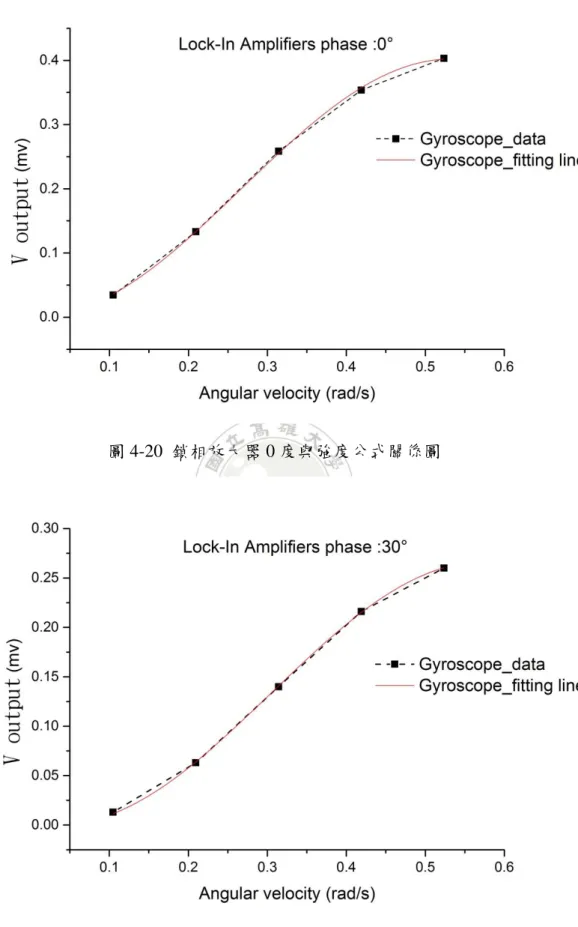
35 表 4-3 實驗數據與公式計算理想值關係表 由表 4-3 可發現利用強度公式所計算的輸出強度振幅值與光纖陀螺儀結合 ZigBee 無線感測系統所量測到的輸出強度振幅誤差值約為±0.005mv,精確度可達 6°/S,因此可以得知利用環形雷射所架設的光纖陀螺儀系統適用於強度公式理論模 型。 (3)鎖相放大器的相位與陀螺儀輸出關係 本節將藉由改變鎖相放大器的相位,探討光纖陀螺儀系統輸出振幅與強度公 式關係。如圖 4-20 為鎖相放大器 0 度與強度公式關係圖。如圖 4-21 為鎖相放大器 30 度與強度公式關係圖。如圖 4-22 為鎖相放大器 60 度與強度公式關係圖。如圖 4-23 為鎖相放大器 90 度與強度公式關係圖。如圖 4-24 為鎖相放大器 120 度與強度 公式關係圖。如圖 4-25 為鎖相放大器 150 度與強度公式關係圖。如圖 4-26 為鎖相 放大器 180 度與強度公式關係圖。 馬達轉速 陀螺儀角速度 系統輸出振幅值 輸出強度振幅理想值 1rpm 0.10472rad/s 0.034mv 0.038mv 2rpm 0.20944rad/s 0.133mv 0.135mv 3rpm 0.31416rad/s 0.258mv 0.257mv 4rpm 0.41888rad/s 0.354mv 0.359mv 5rpm 0.5236rad/s 0.403mv 0.402mv
36
圖 4-20 鎖相放大器 0 度與強度公式關係圖
37
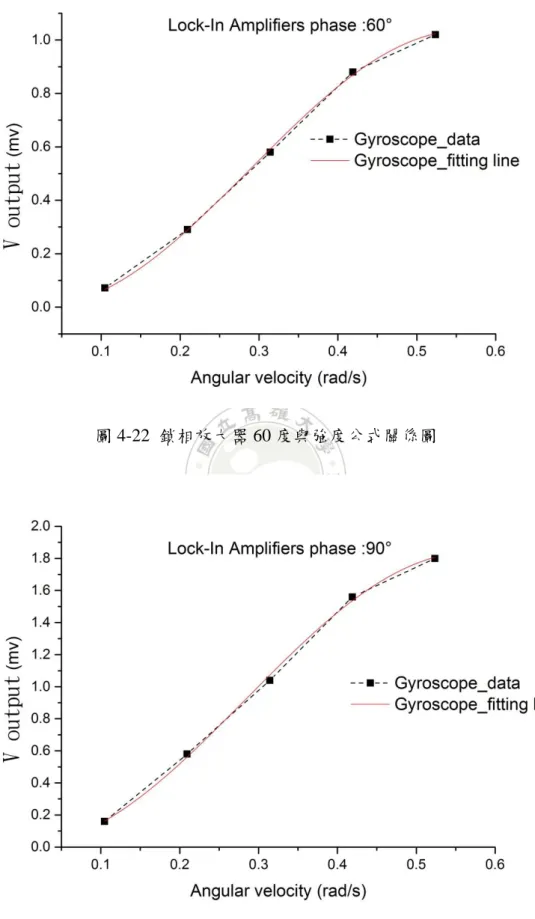
圖 4-22 鎖相放大器 60 度與強度公式關係圖
38
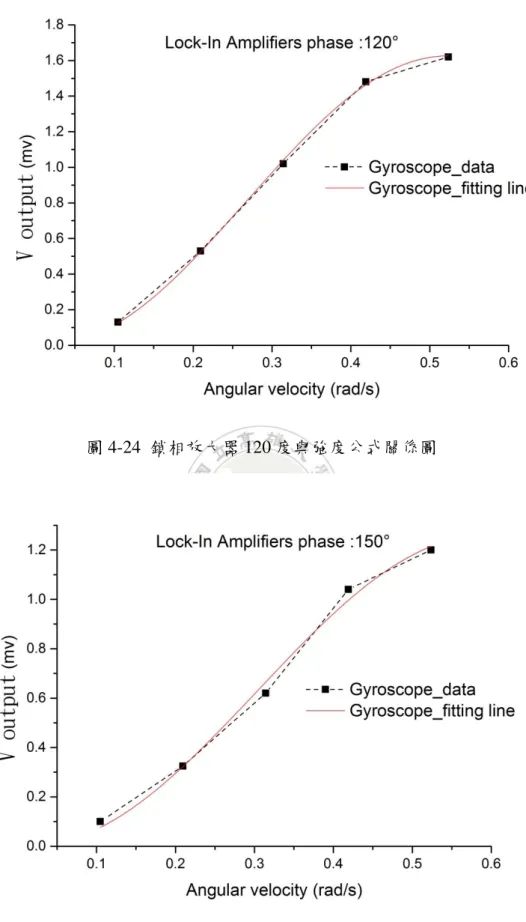
圖 4-24 鎖相放大器 120 度與強度公式關係圖
39 圖 4-26 鎖相放大器 180 度與強度公式關係圖 經由實驗分析後可觀察到改變鎖相放大器相位對輸出訊號的影響,利用曲線 擬合法將所量測的數據代入強度公式可得表 4-4 改變鎖相放大器相位與強度公式 關係表。 鎖相放大器相位 初始相位 訊號初始值 擬合度 0° 180° 0.2012mv 0.99935 30° 171° 0.1333mv 0.9979 60° 174° 0.5187mv 0.99903 90° 178° 0.9204mv 0.99778 120° 177° 0.8128mv 0.99907 150° 175° 0.6306mv 0.98912 180° 179° 0.18879mv 0.99919 表 4-4 改變鎖相放大器相位與強度公式關係表
40
可發現系統輸出的強度振幅會受到鎖相放大器相位所影響而產生較大變化, 其中在相位 90 度時所得到的振幅值最大,可能與光訊號輸入的相位接近。初始相 位一樣位於 180 度左右,經由 Origin9 軟體利用強度公式下去分析所得的擬合度幾 乎接近於 1,所得分析結果可驗證環形雷射光纖陀螺儀系統具有相當的穩定性。
41
第五章
結論
本論文將環形雷射光纖陀螺儀與 ZigBee 無線傳輸技術整合,經由實驗結果的 分析可以得知,光纖陀螺儀系統利用環形雷射架構穩定地提高 EDFA 光輸出能量, 在馬達以低轉速轉動角速度為(0.10472rad/s)時,光纖陀螺儀所量測到的輸出強度振 幅具有相當的穩定性與精確度。此外,光纖陀螺儀結合於 ZigBee 無線傳輸能達到 角速度的無線感測技術,可以減少相關佈線,且在 ZigBee 技術裡感測器模組具有 低功耗及省電的優點。 未來可以透過增加光纖感測環的匝數及半徑來提高光纖陀螺儀系統的精密度 及量測到更低的環境角速度,此外,ZigBee 無線技術可藉由架設多個路由器來增 加感測器與主控制端封包傳送的距離。可將此系統用於馬達的增益校正,以及環 境與工程結構的即時安全監測。42
參考文獻
[1] U. Eco and 謝瑤玲譯, 傅科擺, vol. 12, 皇冠出版社, 1992, pp. 888-890. [2] 姜德生, 楊志勇 and 胡文彬, 光纖陀螺儀測量震動方法數值, 武漢理工大學
報, 2002.
[3] 康獻文, 光纖陀螺儀之感測研究, 國立中山大學電機工程研究所電波光電碩士 論文.
[4] N. Z. a. M. W. N. Wang, "Wireless Sensors in Agriculture and Food Industry—Recent Development and Future Perspective," Computers and Electronics in Agriculture, vol. 50, pp. 1-14, 2006.
[5] David Egan, “The emergence of ZigBee in building automation and industrial control,” Computing & Control Engineering Journal,, pp. 14-19, 2005. [6] 游俊坤, 光纖陀螺儀, 國立中央大學光電科學研究所碩士論文, 2003. [7] 吳曜東, 光纖原理與應用, 全華科技圖書股份有限公司, 2001.
[8] H. J. Arditty and H. C. Lefevre, "Sagnac Effect in Fiber Gyroscopes," Optics Letters, vol. 6, pp. 401-403, 1981. [9] "http://www.zigbee.org/," [Online]. [10] 劉建源, "ZigBee 應用設計-居家照護輔助系統," in 第八屆離島資訊技術與應 用研討會論文集, 2009. [11] 陳文杰, ZigBee 無線感測網路應用程式介面設計與實作, 國立政治大學資訊科 學系碩士論文, 2011,. [12] "http://www.yidianzixun.com/article/0Ci52LVB," 力撲智能家居, 21 3 2016. [Online].
43
[13] E. Desurvire, J. R. Simpson and P. C. Becker, "High-gain erbium-doped
traveling-wave fiber amplifier," OPTICS LETTERS, vol. 12, no. 11, pp. 888-890, 1987.
[14] K. a. B.TMeggitt, Optical Fiber Sensor Technology, vol. 2, Chapman & Hall, 1998, pp. 168-170.
[15] 康喬智, 光纖光柵應用於陀螺儀的感測研究, 國立高雄大學電機工程學系碩士
班, 2013
[16] Fiber Fabry-Perot Tunable Filter,Data Sheet, Micron Optics
[17] Polarization-dependent loss measurements using modular test system configurations,Data Sheet, Agilent.
[18] 曾恆正, 共光程全反射外差干涉術之研究與應用, 國立中央大學光電科學研究
所碩士論文, 2006.
[19] MELSERVO-J2-Super 系列伺服驅動器,技術資料集, MITSUBISHI ELECTRIC,