國 立 交 通 大 學
機械工程學系
碩士論文
非對稱齒形之蝸桿蝸輪組之特性分析
Characteristic Analysis of Asymmetric Worm Gear Sets
研究生:陳宗賢
指導教授:徐文祥 教授
共同指導教授:蔡忠杓 教授
非對稱齒形之蝸桿蝸輪組之特性分析
Characteristic Analysis of Asymmetric Worm Gear Sets
研 究 生: 陳宗賢 Student:Zong-Sian Chen 指導教授: 徐文祥 Advisor:Wen-Syang Hsu 蔡忠杓 Chung-Biau Tsay
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A ThesisSubmitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung of University in Partial Fulfillment of the Requirements
for the Degree of Master
In
Mechanical Engineering June 2007
Hsinchu, Taiwan, Republic of China
非對稱齒形之蝸桿蝸輪組之特性分析 學生:陳宗賢 指導教授:徐文祥 教授 共同指導教授:蔡忠杓 教授 國立交通大學 機械工程學系 碩士班
摘要
蝸桿蝸輪組是空間交錯軸(Cross Axes)的傳動機構,其基本元件為蝸桿 和蝸輪,是常見的傳動齒輪系之一。本研究先依據ZN 型蝸桿之切削方式, 利用左右為直邊且非對稱之刀具,模擬刀具與蝸桿之間的滾削機構,推導 出非對稱齒形之ZN 型蝸桿之齒面方程式。利用此蝸桿之齒面數學模式,配 合蝸桿型滾刀與蝸輪之切削機構關係和嚙合方程式,便可得到蝸輪之齒面 數學模式。利用推導出之蝸桿蝸輪組的齒面數學模式,便可進行蝸桿蝸輪 之間的齒面接觸分析(Tooth Contact Analysis, TCA)與有限元素法(Finite Element Method, FEM)齒輪應力分析,再將分析所得之結果,與一般對稱齒 形之ZN 型蝸桿蝸輪組作比較,探討其差異與優劣,以做為設計與製造之依 據,以求非對稱齒形蝸桿蝸輪組於單方向旋轉時,相較於對稱齒形之蝸桿 蝸輪組,具有較佳的強度,延長其使用壽命。 而其他型之蝸桿蝸輪組,如ZE 型和 ZK 型,亦可採用相似之方法,建 立其非對稱齒形之蝸桿蝸輪組的數學模式,經由接觸分析與應力分析,瞭 解其傳動機構之特性。Characteristic Analysis of Asymmetric Worm Gear Sets
Student: Zong-Sian Chen Advisor: Wen-Syang Hsu Chung-Biau Tsay
Department of Mechanical Engineering National Chiao Tung University
Abstract
The worm gear set, which is composed of a worm and worm gear, is one of the cross axes transmission mechanisms. Based on the cutting method and the asymmetric straight-sided cutter, the mathematical model of the asymmetric ZN-type worm surfaces is developed. The mathematical model of the worm gear surfaces can be obtained by applying the cutting mechanism of the worm gear hobbing process and the equation of meshing between the hob cutter and the produced worm gear surfaces. Based on the developed mathematical model of the worm gear set surfaces, the tooth contact analysis of the worm gear set is performed and the finite element stress analysis is also investigated. By comparing the analysis results of an asymmetric ZN-type worm gear set with a symmetric ZN-type worm gear set, it is most helpful to the design and manufacture of the worm gear sets. It is found that the strength of the asymmetric ZN-type worm gear set is higher than that of the symmetric ones. Therefore, the asymmetric ZN-type worm set is suitable for one direction rotation transmissions.
For other types of worm gear set, eg. ZE-type and ZK-type, the same method and developing procedures can be used. Based on the developed mathematical model of the asymmetric worm gear set, the characteristics of the worm gear set are obtained by applying the contact analysis and stress analysis.
誌謝
本論文之所以能順利完成,首先要感謝指導教授 蔡忠杓博士與 徐 文祥博士,在學生對於論文研究有所困惑時,能夠耐心並細心地指出學生 研究過程中的盲點。不只在學業上指導,在待人處世時表現出的態度,也 絕對是學生效法的對象,故在此由衷感謝老師為學生的付出。 同時,也感謝擔任口試委員的劉家彰學長,百忙中抽空來對學弟之論文 的指教與建議,讓本論文在內容上更為嚴謹且完備。而對於曾一同在齒輪 實驗室生活的曾瑞堂學長、陳冠宇學長、趙立碁學長、陳威良學長、張志 榮學長、游明達學長、蘇政豪學長、黃俊諭學長和羅偉旭學長表示感謝, 感謝他們在疑難時提供諮詢,讓本論文在研究上的艱辛少了幾分;也感謝 家誠和健育兩位同學,不僅在學業上互相討論砥礪,也是生活上的好朋友, 感謝實驗室的各位,認識大家真的令人感到相當快樂開心。 此外,也感謝一起生活兩年的三位室友,讓生活中總是充滿歡笑,不 論是學業上、感情上及生活上,都能相互的給予意見,度過這兩年中的開 心與低潮。 最重要的是感謝將我養育成人的父母,多年來的栽培與支持,而妹妹 與弟弟的陪伴,也是一路走來的原動力。將今日的成就,獻給最可愛的家 人。 最後,滿懷感激的謝謝所有幫助過我的人,你們的協助,都是不可或 缺的一部分。目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iii 目錄 ... iv 圖目錄 ... vii 表目錄 ... ix 符號表 ... x 第一章 緒論 ... 1 1.1 簡介 ... 1 1.2 蝸桿蝸輪組之特點... 1 1.3 蝸桿之種類 ... 3 1.4 文獻回顧 ... 6 1.5 研究方向 ... 7 第二章 基本理論 ... 8 2.1 向量座標轉換 ... 8 2.2 相對運動速度 ... 8 2.3 軌跡法 ... 11 2.4 嚙合方程式 ... 11 第三章 蝸桿之齒面數學模式 ... 14 3.1 介紹 ... 143.2 ZN 型蝸桿... 14 3.2.1 切削 ZN 型蝸桿之刀具數學模式... 14 3.2.2 ZN 型蝸桿之齒面數學模式... 19 第四章 蝸輪之齒面數學模式 ... 25 4.1 介紹 ... 25 4.2 蝸輪之滾削機構 ... 25 4.3 ZN 型蝸輪之齒面數學模式... 30 第五章 蝸桿與蝸輪之齒面接觸分析 ... 37 5.1 介紹 ... 37 5.2 蝸桿與蝸輪之嚙合模擬... 37 5.2.1 蝸桿與蝸輪之嚙合機構 ... 39 5.2.2 蝸桿與蝸輪之嚙合條件式 ... 40 5.3 本章結論 ... 41 第六章 蝸桿蝸輪組之有限元素分析 ... 45 6.1 前言 ... 45 6.2 分析模型之建立 ... 46 6.2.1 實體模型與有限元素網格 ... 46 6.2.2 接觸面之關係與表面特性之定義... 46 6.3 分析結果 ... 48 第七章 結論與未來展望 ... 63 7.1 結論 ... 63
7.2 未來展望 ... 64 參考文獻 ... 65
圖目錄
圖 1-1 蝸桿之類別 ... 5 圖 2-1 空間物體 P 點之座標系與位置向量示意圖 ... 9 圖 2-2 空間兩物體之相對速度 ... 10 圖 2-3 空間嚙合曲面間之關係示意圖 ... 13 圖 3-1 切削 ZN 型蝸桿時刀具與工件之關係示意圖 ... 15 圖 3-2 切削 ZN 型蝸桿時刀具與工件座標系之關係圖 ... 16 圖 3-3 切削 ZN 型蝸桿之刀具剖面圖 ... 18 圖 3-4 ZN 型蝸桿齒面形成之機構示意圖 ... 20 圖 3-5 ZN 型蝸桿之齒形 ... 24 圖 4-1 蝸輪之滾削模擬機構示意圖 ... 26 圖 4-2 具齒根導角之切削刀具 ... 34 圖 4-3 ZN 型蝸輪之齒面(紅線表示非對稱齒形,黑線表示對稱齒形).... 36 圖 5-1 蝸桿與蝸輪之嚙合模擬機構示意圖 ... 38 圖 5-2 壓力角為 20°時 ZN 型蝸桿與蝸輪之瞬間接觸線... 42 圖 5-3 壓力角為 22.5°時 ZN 型蝸桿與蝸輪之瞬間接觸線... 43 圖 5-4 壓力角為 25°時 ZN 型蝸桿與蝸輪之瞬間接觸線... 44 圖 6-1 ZN 型蝸桿蝸輪組(a)實體模型(b)網格模型... 47 圖 6-2 ZN 型蝸桿蝸輪組有限元素法接觸分析模型之邊界條件與負載.... 49 圖 6-3 ZN 型蝸輪之齒面應力分布(非接觸面壓力角 20°) ... 52 圖 6-4 ZN 型蝸桿之齒面應力分布(非接觸面壓力角 20°) ... 53圖 6-5 ZN 型蝸輪之齒面應力分布(非接觸面壓力角 22.5°) ... 54 圖 6-6 ZN 型蝸桿之齒面應力分布(非接觸面壓力角 22.5°) ... 55 圖 6-7 ZN 型蝸輪之齒面應力分布(非接觸面壓力角 25°) ... 56 圖 6-8 ZN 型蝸桿之齒面應力分布(非接觸面壓力角 25°) ... 57 圖 6-9 ZN 型蝸輪之齒面應力分布(接觸面壓力角 22.5°) ... 59 圖 6-10 ZN 型蝸桿之齒面應力分布(接觸面壓力角 22.5°) ... 60 圖 6-11 ZN 型蝸輪之齒面應力分布(接觸面壓力角 25°) ... 61 圖 6-12 ZN 型蝸桿之齒面應力分布(接觸面壓力角 25°) ... 62
表目錄
表 3-1 蝸桿之主要齒面參數 ... 23 表 4-1 滾刀與蝸輪之主要設計參數 ... 35 表 6-1 ZN 型蝸桿蝸輪組之設計參數 ... 50 表 6-2 蝸桿蝸輪之材料特性 ... 51 表 6-3 有限元素模型資料 ... 54 表 6-4 非對稱齒形之蝸桿蝸輪組的應力分析結果 ... 58符號表
C 兩旋轉軸最短距離(mm) f 齒根導角設計參數(mm) Δh 旋轉軸偏移量(mm) il
刀具直邊設計參數(i=1,2)(mm)]
[
L
ij 法向量轉換矩陣 ghm
轉速比 M 軸向模數(mm\Teeth) Mn 法向模數(mm\Teeth)]
[
M
ij 位置向量轉換矩陣 Ni 蝸桿牙數、蝸輪齒數(i=0,1) N 法向量 iO
S 座標系之原點 i P 空間座標點 P 導程(mm) ) (i tr
刀具面位置向量參數(i=R,L) 1r
蝸桿節圓半徑(mm) or
蝸桿外徑(mm) fr
蝸桿根徑(mm) Ri 於S 座標系之位置向量 in
s
法向齒槽寬S
理想中心距(mm) hS
嚙合中心距(mm) ) ( ABV
物體A 相對於物體 B 之速度 iV
於S 座標系之速度 i)
,
,
(
i i i ix
y
z
S
S 座標系 i iα
刀具直邊夾角、齒面壓力角(°)β
蝸桿導程角(°)γ
兩旋轉軸理想夾角(°) wγ
兩旋轉軸嚙合夾角(°)φ
蝸桿型滾刀之旋轉角(°)φ
′
蝸桿嚙合之旋轉角(°) gφ
蝸輪創成之旋轉角(°) gφ
′
蝸輪嚙合之旋轉角(°) Σi 曲面(i=1,2) iω
旋轉角速度(rad/s)(i=o,g,w)ψ
蝸桿切削時之旋轉角(°) iθ
齒根導角圓弧邊參數(i=1,2)(°)第一章
緒論
1.1 簡介 蝸桿蝸輪組是空間交錯軸(Cross Axes)的傳動機構,其基本元件為蝸桿 和蝸輪,是常見的傳動齒輪系之一,其傳動減速比可從5 到 400。由於蝸桿 蝸輪組具有傳動轉速比高,工作平穩、結構緊湊等優點,故在各種減速機 構中被廣泛的運用。例如電扶梯之傳動與汽車轉向機構中,是十分重要的 空間傳動機構。雖然蝸桿蝸輪在國內有一定之市場,然而我國齒輪製造業 者在蝸桿蝸輪減速機構所需之基本理論研究、設計、分析,乃至於製造與 測試之能力,仍有欠缺之處。有鑑於此,本研究針對工業界使用較普遍之 ZN 型蝸桿蝸輪組,建立其非對稱齒形之蝸桿蝸輪的齒面數學模式,並藉由 數學模式進行非對稱齒形之蝸桿蝸輪的特性分析,其結果將與對稱齒形之 蝸桿蝸輪作比較分析。 1.2 蝸桿蝸輪組之特點 蝸桿蝸輪之傳動是屬於空間交錯軸之嚙合運動,兩傳動軸可以交錯成 任意角度,但是通常其交錯角為九十度。蝸桿蝸輪組之種類雖然很多,但 均具有以下的優點: 1. 結構緊湊:不只因其為交錯軸的特性,同時也因其單級之傳動轉速比 大,可以替代多級式的齒輪減速運動,不但減小了零件數目,而且簡 化了機構,因此可以獲得體積小、重量輕、結構緊湊之傳動機構。 2. 高傳動速比:由於蝸桿直徑小、齒數少,而蝸輪之直徑大、齒數多, 故可實現單級較大的傳動轉速比,其傳動減速比可從5 到 400,但通常之傳動速比為8 至 80 之間。 3. 工作穩定、噪音小、振動小:因為蝸桿和蝸輪齒面間的嚙合傳動是滑 動和滾動的組合,並且以滑動為主,同時又可實現在同一時間內,蝸 桿與蝸輪之嚙合齒數不少於二個,故可以達到工作平穩,噪音小與振 動小的要求。因此,蝸桿蝸輪組被廣泛地應用於一些對噪音與振動要 求較嚴苛之場合,如電梯、升降機以及電動手扶梯等。 4. 具自鎖(Self-Locking)功能:只要適當地設定設計蝸桿導程角(Lead Angle),就可以使得蝸桿蝸輪傳動組具有自鎖能力,亦即如果設計蝸 桿導程角小於蝸桿蝸輪組之摩擦角,即可達到自鎖的功能而具有防止 反轉之安全措施。 5. 傳動精準:由於蝸桿與蝸桿可以有較大之齒數比,且一般均以蝸桿為 主動件,蝸輪則為從動件。因此,蝸桿與蝸輪間之運動誤差(Kinematic Error)將因其具有較高之齒數比而減小。故蝸桿蝸輪組近年來亦被使 用於需精確傳動之場合,如工作母機之旋轉工作平台的傳動等應用場 合。 蝸桿蝸輪組之傳動機構雖具有上述之優點,但是也有下列之缺點需加 以改善或克服者: 1. 傳動效率低:為了實現高傳動轉速比,必須採用小導程角的蝸桿,此 時蝸桿之傳動效率將大幅降低,若採用具有自鎖性的蝸桿蝸輪組,則 其傳動效率更低。 2. 傳遞功率受限制:因為傳動效率低表示其動力損失大,一部分能量消
耗在蝸桿蝸輪組之嚙合摩擦上,所以一般圓柱型蝸桿蝸輪組的傳遞功 率,通常不超過 45 千瓦(KW)。 3. 磨耗嚴重:由於蝸桿與蝸輪間之傳動主要以滑動為主,若蝸桿蝸輪在 嚙合的過程中因接觸齒印(Bearing Contact)之形狀或位置不佳,而使得 潤滑油膜無法順利形成,將會造成蝸桿與蝸輪間之齒面直接接觸,由 於摩擦產生高溫將會使得蝸輪齒面產生膠著性磨損以及磨料磨損,因 而使得蝸桿蝸輪組之磨耗情況較為嚴重。 4. 製造成本昂貴:由於蝸輪之材料一般是採用銅合金(例如磷青銅等), 其材料成本較高,且切製蝸輪之滾刀均為專用滾刀,也因此增加了蝸 輪之製造成本。 1.3 蝸桿之種類 蝸 桿 之 製 作 方 式 主 要 可 以 分 為 軌 跡 法 (Locus Method) 以 及 創 成 法 (Generation Method)[4]。以軌跡法所切削之蝸桿,一般是在車床上以直邊刀 刃的車刀切削出來,亦即在加工蝸桿齒面時,由一母線(即刀刃)與蝸桿(工 件)軸線作相對螺旋運動,便可切削出蝸桿之齒面,以這種加工方法所切削 之齒面稱為軌跡齒面。以創成法製造蝸桿時,一般是在銑床或磨床上用盤 狀環面刀具加工出來,用這種方法加工的蝸桿齒面為刀具面的包絡面 (Envelope),所以此種加工方法所產生之齒面稱為包絡曲面。根據不同的加 工方法,可將圓柱型蝸桿曲面分為軌跡曲面和包絡曲面兩類。而根據車刀 安裝位置之不同,其所切削出來的蝸桿齒面其齒廓剖面曲線形狀也不同, 因此又可以將軌跡曲面分為阿基米德圓柱蝸桿(Archimedean Worm)、法向直
廓圓柱蝸桿(Straight-Sided Normal Worm)與漸開線形蝸桿(Involute Shaped Worm)三種。包絡曲面則以錐面包絡圓柱蝸桿(Milled Helicoid Worm)為代 表,現將四種主要之蝸桿型式簡介如下: 1. ZA 型蝸桿,又稱為阿基米德圓柱蝸桿,如圖 1-1(a)所示,其垂直蝸桿 軸線剖面的齒形為阿基米德螺線。與其配對的蝸輪,在通過蝸桿軸線 並垂直於蝸桿軸線的平面內其齒形為漸開線。此型蝸桿車製簡單,但 受限於導程角不能太大及不利輪磨進行齒面精加工的條件。 2. ZN 型蝸桿,又稱為法向直廓圓柱蝸桿,如圖 1-1(b)所示。此型蝸桿是 將車刀的切削刃安置在垂直於蝸桿螺旋線的法向截面內,因此,這種 刀具安置方式將使得車刀可以具有合理的前角與後角。 3. ZK 型蝸桿,又稱為錐面包絡圓柱蝸桿,如圖所示 1-1(c)。此型蝸輪是 利用軸向剖面為梯形的磨輪來磨削,加工時將磨輪置於蝸桿齒槽內, 並令刀具軸線和蝸桿軸線交錯成一個等於蝸桿導程角的角度。在磨削 的過程中,蝸桿(工件)做螺旋運動,刀具則繞自身旋轉軸線旋轉。ZK 型蝸桿是由阿基米德圓柱蝸桿改進所產生,因其不同於 ZA 型蝸桿, 且此種蝸桿可以用直邊磨輪磨削加工,故其齒形精度較高,並廣為工 業界所使用。 4. ZE 型蝸桿亦稱為 ZI 型蝸桿,亦即漸開線形蝸桿,如圖 1-1(d)所示。 其端面齒廓為漸開線。其蝸桿齒廓為凸形曲線;而在切於基圓柱的軸 向剖面,齒廓的一側為直線,另一側為凸形曲線,所以用車刀加工時, 刀具切削刃的頂平面應切於基圓柱。
2Rb
(c)
ZK型蝸桿(b)
ZN型蝸桿(a)
ZA型蝸桿 阿基米德曲線(d)
ZE型蝸桿 直線 漸開線 Rb 表基圓半徑圖
1-1 蝸桿之類別
以上四類型之蝸桿中,ZA 型的蝸桿導程角不能太大且不易精加工,因此蝸 桿的齒面精度也較差。ZK 型蝸桿由於可以採用直邊磨輪來加以研磨,因此 可以獲得較佳的齒面精度和表面粗度。ZE 型蝸桿齒面則因可用平面磨輪來 加以研磨,所以可以得到較高精度的齒形,也就被廣泛應用在傳動機構上。 而ZN 型蝸桿因其齒面乃是由直邊車刀傾斜一導程角所切削而成,所以其法 向齒槽之齒形為一直線。又因ZN 型蝸桿之齒形與一般齒輪標準滾刀之刀具 外形相同,因此,創成ZN 型蝸輪之滾刀為法向直邊滾刀,其創成刀具均具 有容易修整之優點,因此,在製造上將可切削出精度較高之蝸輪。 1.4 文獻回顧 由於蝸桿蝸輪組在減速機構中被廣泛利用,是十分重要的空間傳動機 構,因此關於蝸桿蝸輪的設計與製造,國內外已經有多位學者做出相當大 的貢獻。Winter 等人[1]於 1981 年提出圓柱蝸桿具不同齒廓的齒面計算及材 質和潤滑效果比較。Bosch 等人[2]於 1988 年提出以電腦數值控制的輪磨機 來製造出低成本且精密度高之蝸桿製造方法。同時Simon[3]亦於 1994 年針 對以圓弧邊之磨輪所磨削之蝸桿,利用蝸輪齒面上之接觸線研究其蝸輪齒 面之應力負荷以及能量損耗之情形。Litvin[4-6]提出齒輪理論之相關探討及 齒面接觸分析。Zheng 等人[7-8]於 1989 年提出以一條動線(Generating Line) 在空間運動產生之軌跡面,來表示蝸桿齒面,並研究其製造加工程序。Jeng 和Tsay[9]於 1993 年利用模擬 ZE 型蝸桿與蝸輪之切削方式與切製機構,推 導出ZE 型蝸桿蝸輪之齒面數學模式。Bair 和 Tsay[10]於 1998 年探討了 ZK 型蝸桿蝸輪組之接觸齒數、接觸比和運動誤差。Fang 和 Tsay[11]於 2000 年
推導出ZN 型蝸桿蝸輪組之齒面數學模式,並研究利用增徑滾刀來滾削 ZN 型蝸輪及其蝸桿蝸輪組之接觸分析,除了計算蝸桿蝸輪組之接觸點以及齒 印的大小與形狀,並探討其嚙合接觸路徑。Wang[12]於齒輪原理概要中提 供蝸桿蝸輪組之各項參數設計及公式。 1.5 研究方向 本研究所探討的為非對稱齒形之蝸桿蝸輪組與一般對稱齒形蝸桿蝸輪 組之間的差異。首先,以法向齒形為對稱直廓的ZN 型蝸桿為主,改變 ZN 型蝸桿所用之車刀外形,切製出左右齒面壓力角不同的非對稱齒形之ZN 型 蝸桿蝸輪組,並推導其齒面數學模式。利用此ZN 型蝸桿蝸輪組之齒面數學 模式,即可進行蝸桿蝸輪組之齒面接觸分析和應力分析。並將分析結果與 對稱齒形之蝸桿蝸輪組做比較,探討其中之差異與優劣,以做為蝸桿蝸輪 組設計及製造之依據,以求非對稱齒形蝸桿蝸輪組於單方向旋轉時,相較 於對稱齒形之蝸桿蝸輪組,具有較佳的強度,延長其使用壽命。
第二章
基本理論
2.1 向量座標轉換
空間中假設有一點 P,可將其位置向量分別表示於座標系 Sf(Xf , Yf , Zf)
與Si(Xi , Yi , Zi)為 Rf與Ri,如圖 2-1 所示。此兩座標系之間的位置向量轉換
可以用下列之齊次座標轉換矩陣(Homogeneous Coordinate Transformation Matrix)方程式表示之:
[
f i]
i f M R R = (2.1) 其中[ ]
⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 1 0 0 0 ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) ( ) ( ) ( i i i O f i f i f i f O f i f i f i f O f i f i f i f i f Z Z Z Y Z X Z Y Z Y Y Y X Y X Z X Y X X X M (2.2) 上式中cos(Xf , Xi)表示 Xf軸與Xi軸間夾角之餘弦值,以此類推;而X(fOi)、 ) (Oi f Y 及 (Oi) f Z 則為Si(Xi , Yi , Zi)座標系之原點表示於 Sf(Xf , Yf , Zf)座標系的三個座 標軸分量。至於一般之速度、法線向量等之表示式,因與座標原點無關, 所以此類向量的座標系間的轉換矩陣,可由位置向量轉換矩陣[Mf i]刪去其 最後一行及最後一列並表示如下:[ ]
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( ) , cos( i f i f i f i f i f i f i f i f i f i f Z Z Y Z X Z Z Y Y Y X Y Z X Y X X X L (2.3) 2.2 相對運動速度 假設空間中有物體 A 與物體 B,分別固聯於座標系 SA(XA, YA , ZA)與 SB(XB , YB , ZB),如圖 2-2 所示,ZA軸與 ZB軸分別為物體A 與物體 B 之旋 轉軸,其旋轉角速度分別為ω1與 ω2,γ 為兩旋轉軸之交錯角,而 C 則P
R
fR
iX
fY
fO
fZ
fY
fX
fO
fZ
f圖
2-1 空間物體 P 點之座標系與位置向量示意圖
X , X
A BP
O
AR
Aω
AZ
AC
O
B BY
BZ
Bγ
Y
Aω
R
BR
圖
2-2 空間兩物體之相對速度
為兩旋轉軸之最短距離,P 點為物體 A 與物體 B 之瞬間接觸點。因此,在 物體1 之瞬間接觸點 P 的速度 VA可由下式求得: A A A
ω
R
V
=
×
(2.4) 其中RA是物體A 旋轉軸上任一點指向接觸點 P 之位置向量。同理,VB可 由下式求得: B B Bω
R
V
=
×
(2.5) 其中RB是物體 B 旋轉軸上任一點指向接觸點 P 之位置向量。由(2.4)及(2.5) 式可求得物體A 與物體 B 之相對速度如下:(
) (
)
(
B)
A B B B A A B A ABω
R
R
ω
ω
R
ω
R
ω
V
V
V
×
−
×
−
=
×
−
×
=
−
=
A) ( (2.6) 其中R 是由物體 A 之參考座標系原點 OA指向物體 B 之旋轉軸上任一點之 位置向量。 2.3 軌跡法 ZN 型、ZA 型與 ZE 型蝸桿的齒面,均可在車床上用一把直邊車刀切製 而成。如果以刀刃直邊之直線為動線,而沿著蝸桿之旋轉軸做螺旋運動 (Screw Motion),則此直線在空間所形成的軌跡便是蝸桿的齒面。這種產生 齒面的方法就是軌跡法。 2.4 嚙合方程式 嚙合方程式是齒輪原理中重要的理論之一。如果蝸桿蝸輪組之兩個旋 轉軸的中心距和交錯角均為已知,則蝸桿型滾刀與蝸輪在滾削過程之相對
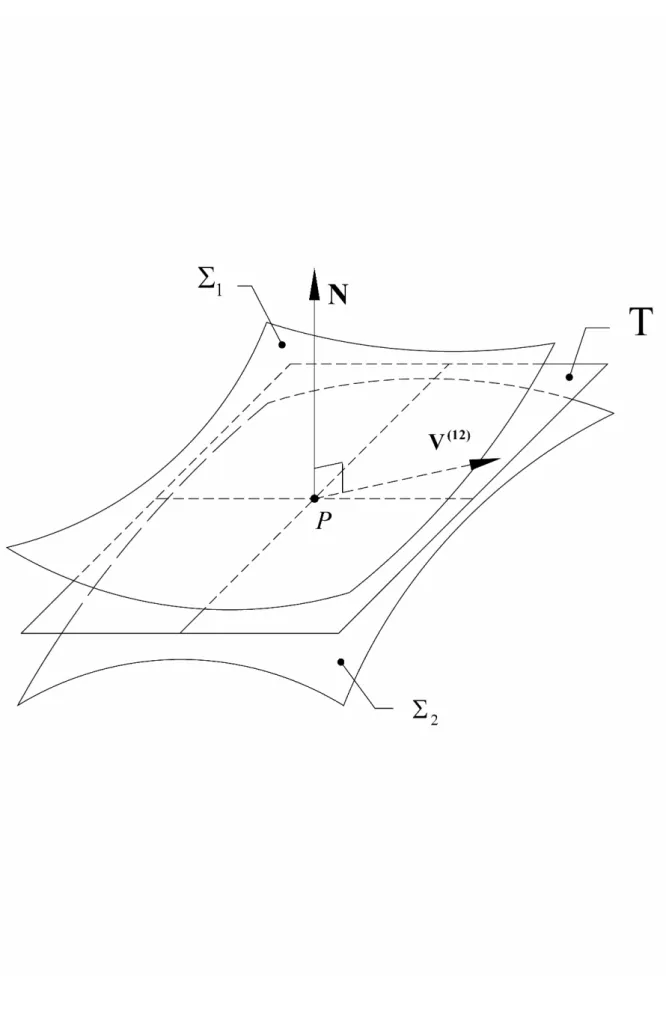
運動即可求出,進而可求得兩者之嚙合方程式。嚙合方程式確保了蝸輪齒 面和蝸桿型滾刀面間之相切關係,同時也表示了兩者運動參數間的關係。 茲考慮空間中有兩個互相嚙合運動的曲面 ΣA與 ΣB,如圖 2-3 所示,P
點則為此兩互相嚙合運動曲面相切的共切點(Common Tangent Point),同時 也是這兩個嚙合曲面的瞬時接觸點。兩個嚙合曲面在其共切點 P 點具有共 同之曲面法向量(Common Normal Vector)N;圖中V(12)則表示曲面 Σ
A和 ΣB 在 P 點的相對速度。由於兩曲面嚙合運動時,其中一個曲面與另一曲面既 不分離亦不衝撞進入其曲面內,因此,在兩曲面之共同法向量的方向其相 對速度V(12)為零,故接觸之兩曲面其相對速度必落於共同切平面(Common Tangent Plane)T 上面,因此,共同法向量 N 必與共切面 T 相互垂直。可從 上述現象得到以下之結論:兩嚙合運動曲面其相對速度V(12)和共同法向量 N,在其共同接觸點 P 處必相互垂直。所以下式必成立: 0 ) 12 ( = ⋅V N (2.7) 上式就是齒輪原理中探討共軛運動對之嚙合運動條件的嚙合方程式。此嚙 合方程式對於二維(Two - Dimensional)及三維(Three - Dimensional)的共軛運 動對均可適用。
第三章
蝸桿之齒面數學模式
3.1 介紹 蝸桿根據其製造方式的不同,可區分為各種不同的型式,主要可區分 為ZA 型、ZE 型、ZK 型及 ZN 型等四型。本章先根據 ZN 型蝸桿之切削方 式,利用非對稱型之刀具,推導蝸桿之齒面數學模式。而以下之推導步驟 乃是基於下列三點假設:(1)不考慮彈性變形,亦即在切削過程中將刀具與 工件視為剛體。(2)不考慮動態情形與溫度效應。(3)不考慮機器設定誤差與 間隙的影響。接著可利用蝸桿之齒面方程式以及蝸桿型滾刀與蝸輪之創成 關係,推導出蝸輪齒面數學模式,因此亦可據此獲得蝸輪任一截面上之齒 形。 3.2 ZN 型蝸桿 ZN 型蝸桿之齒面可用直邊車刀架在車床上,沿著其蝸桿節圓柱之螺旋 線切削而成;螺旋線之導程即為蝸桿之導程,而在切削過程中刀具相對於 蝸桿之旋轉軸 Z1具有一個傾斜角 β,如圖 3-1 所示,此一傾斜角等於蝸桿 之導程角。本節中將先推導車刀左右直邊之數學模式,然後利用座標轉換 的原理將此刀具之軌跡方程式轉換至 ZN 型蝸桿齒面座標系上,便可求得 ZN 型蝸桿之齒面方程式。 3.2.1 切削 ZN 型蝸桿之刀具數學模式 切削 ZN 型蝸桿之刀具剖面及刀具與蝸桿工件座標系間之關係如圖 3-2 所示。與一般ZN 型蝸桿所使用之刀具不同,此刀具左右側直邊具有不同之圖
3-2 切削 ZN 型蝸桿時刀具與工件座標系之關係圖
(a)
(b)
β 2 2 2 1 − 4n sin s r夾角,但刀具厚度不變,因此所切削出之蝸桿,其左右齒面具有不同的壓 力角,而且具有相同之法向齒槽寬。圖3-3(a)為刀具在垂直於蝸桿螺旋線方 向之剖面圖,茲分別將刀具左右側直邊之位置向量方程式表示於Sc(Xc, Yc , Zc)座標系如下: 刀具右側直邊之位置向量: 1 1 ) ( ) ( 1 1 ) ( ) ( sin 0 cos
α
α
l z y l r x R c R c R t R c − = = + = (3.1) 刀具左側直邊之位置向量: 2 2 ) ( ) ( 2 2 ) ( ) ( sin 0 cos α α l z y l r x L c L c L t L c = = + = (3.2) 上式中之li( i=1,2 )為直邊刀具之刀面設計參數,其中 max( ) ) ( min R R l l l ≤ 1 ≤ , ) ( max ) ( min L L l l l ≤ 2 ≤ ,如圖3-3 所示;αi( i=1,2 )則是刀具面的另一設計參數,分別 是刀具兩側直邊與垂直軸之夾角,也是所切削之蝸桿相對應齒面的法向齒 形角。圖 3-2(a) 為直邊車刀相對於蝸桿工件之位置關係圖。由於車刀在位 於蝸桿節圓柱之厚度須與蝸桿之法向齒槽寬相同,根據圖3-3(b)所示之幾何 關係,方程式(3.1)和(3.2)中之刀具面位置向量參數r
t(i)( i=R,L )可分別利用 下式求出: 1 2 2 2 1 ) ( tan 2 sin 4 β α n n R t s s r r = − − (3.3)圖
3-3 切削 ZN 型蝸桿之刀具剖面圖
(a)
2 2 2 2 1 ) ( tan 2 sin 4
β
α
n n L t s s r r = − − (3.4) 上式中sn為蝸桿之法向齒槽寬,r1則為蝸桿之節圓半徑。 3.2.2 ZN 型蝸桿之齒面數學模式 由於 ZN 型蝸桿齒面是由一直邊刀具傾斜一角度所切削而成,所以在推 導 ZN 型蝸桿齒面數學模式之過程中,只須考慮刀具在蝸桿座標系 S1(X1 , Y1 , Z1)之軌跡方程式,即可求得 ZN 型蝸桿之齒面方程式。以上所述之方法 就是齒輪原理上所謂之軌跡法。 如圖 3-4 所示為 ZN 型蝸桿之切削成形機構示意圖,此成形機構關係可 由蝸桿之座標系S1(X1 , Y1 , Z1)與切削所用之刀具的固聯座標系 Sc(Xc , Yc , Zc)之相對運動關係來模擬,而 Sf(Xf , Yf , Zf)則為參考之固定座標系。Z1軸 為蝸桿之旋轉軸,直邊刀具之左右刀刃均位於Zc-Xc平面,β 則為蝸桿之導 程角。由圖3-4 可知,切削所用刀具之軌跡方程式表示於 S1(X1 , Y1 , Z1)座 標系,可由下列之齊次座標轉換矩陣求得如下:[
]
⋅ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 0 0 0 0 0 0 − 0 0 0 0 1 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 0 0 0 − 1 0 0 0 0 − 0 0 = 1 β β β β ψ ψ ψ ψ ψ cos sin sin cos cos sin sin cos P M C (3.5) 上式中齒面參數ψ
為切削時蝸桿之旋轉角,P 為螺旋運動之導程(Lead)。X , Xf c O , Of c Z c Z f Yc Y f β X f Z , Z f 1 O f X 1 ψ Y 1 Y f O 1 O O = P ψf 1
圖
3-4 ZN 型蝸桿齒面形成之機構示意圖
(a)
(b)
因此,ZN 型蝸桿之右齒面方程式為 ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 sin 0 cos 1 0 0 0 cos sin 0 0 sin cos cos cos sin 0 sin sin cos sin cos 1 2 2 2 2 ) ( ) ( 1 ) ( 1 ) ( 1 α α ψ β β β ψ β ψ ψ β ψ β ψ ψ l l r P z y x L t R R R (3.6) 而ZN 型蝸桿之左齒面方程式則為 ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 sin 0 cos 1 0 0 0 cos sin 0 0 sin cos cos cos sin 0 sin sin cos sin cos 1 1 1 1 1 ) ( ) ( 1 ) ( 1 ) ( 1 α α ψ β β β ψ β ψ ψ β ψ β ψ ψ l l r P z y x R t L L L (3.7) 由於蝸桿齒面方程式需限制於蝸桿的外徑 ro與根徑 rf之間,因此,上 式中的設計參數li(i=1,2)其最大值與最小值,可由下列關係式分別求得: 2 2 1 2 1 y ro x + = (3.8) 即
(
( )
)
1 2 2 1 2 1 ) ( 1 2 2 2 1 2 2 ) ( 2 max , 1 cos sin sin cos cos sin sin α β α α α β α + − + − = R t o R t o r r r r l (3.9) 又 12 2 2 1 y rf x + = (3.10) 即(
( )
)
1 2 2 1 2 1 ) ( 1 2 2 2 1 2 2 ) ( 2 min , 1 cos sin sin cos cos sin sin α β α α α β α + − + − = R t f R t f r r r r l (3.11) 同理( )
(
)
2 2 2 2 2 2 ) ( 2 2 2 2 2 2 2 ) ( 2 max , 2 cos sin sin cos cos sin sin α β α α α β α + − + − = L t o L t o r r r r l (3.12)( )
(
)
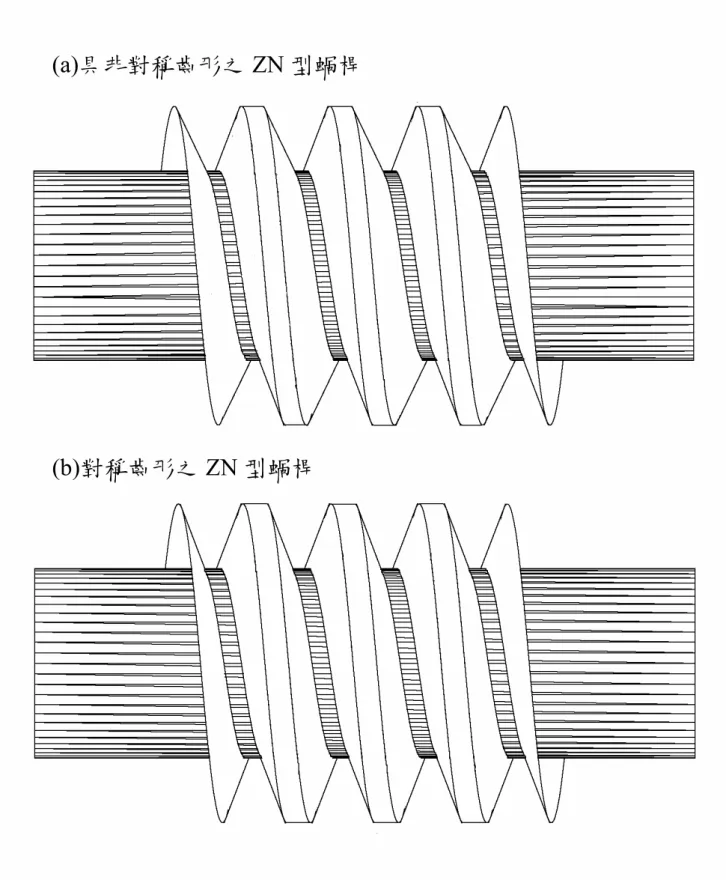
2 2 2 2 2 2 ) ( 2 2 2 2 2 2 2 ) ( 2 min , 2 cos sin sin cos cos sin sin α β α α α β α + − + − = L t f L t f r r r r l (3.13)茲有兩蝸桿其主要之齒面設計參數及數據,如表3-1 所示。利用 ZN 型蝸桿 左右齒面方程式(3.6)和(3.7),即可繪出具有非對稱齒形(即左右齒面具不同 壓力角)之 ZN 型蝸桿之齒面,如圖 3-5(a)所示,而圖 3-5(b)則為一般對稱齒 形之ZN 型蝸桿。 而ZN 型蝸桿之齒面為一規則曲面,因此可藉由對蝸桿兩個齒面參數之 偏微分的乘積(Cross Product),分別求岀其左右齒面之法向量如下: ZN 型蝸桿右齒面之法向量為
ψ
∂ ∂ × ∂ ∂ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = 1 1 1 1 1 1 1 ) ( ) ( ) ( ) ( ) ( ) ( R R L z L y L x R l N N N R R N (3.14) 其中 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ∂ ∂ β α ψ β α ψ α ψ β α ψ α cos sin cos sin sin sin cos sin sin sin cos cos 2 2 2 2 2 1 ) ( 1 l R R (3.15)(
)
(
)
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + + − − + − = ∂ ∂ P l l r l l r L t L t R ψ β α ψ α ψ β α ψ αψ cos cos sin sin sin cos sin sin sin cos 2 2 2 2 ) ( 2 2 2 2 ) ( ) ( 1 R (3.16) ZN 型蝸桿左齒面之法向量為 ψ ∂ ∂ × ∂ ∂ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = 1 2 1 1 1 1 1 ) ( ) ( ) ( ) ( ) ( ) ( L L L z L y L x L l N N N R R N (3.17) 其中 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + − + = ∂ ∂ β α ψ β α ψ α ψ β α ψ α cos sin cos sin sin sin cos sin sin sin cos cos 1 1 1 1 1 1 ) ( 1 l L R (3.18)
(
)
(
)
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − + − + + − = ∂ ∂ P l l r l l r R t R t L ψ β α ψ α ψ β α ψ αψ cos cos sin sin sin cos sin sin sin cos 1 1 1 1 ) ( 1 1 1 1 ) ( ) ( 1 R (3.19)
表
3-1 蝸桿之主要齒面參數
齒形 對稱齒形 非對稱齒形 齒面 左齒面 右齒面 蝸桿齒數 N1 1 1 1 軸向模數 M 8.500 mm 8.500mm 8.500 mm 法向模數 Mn 8.452 mm 8.452 mm 8.452 mm 節圓半徑 r1 39.75 mm 39.75 mm 39.75 mm 外徑 r1o 48.250 mm 48.250 mm 48.250 mm 根徑 r1f 28.7 mm 28.7 mm 28.7 mm 法向壓力角 α 20° 20° 25° 導程角 β 6.103° 6.103° 6.103° 導程 P 4.250 mm/rad 4.250 mm/rad 4.250 mm/rad圖
3-5 ZN 型蝸桿之齒形
(a)具非對稱齒形之 ZN 型蝸桿
第四章
蝸輪之齒面數學模式
4.1 介紹
製造蝸輪有兩種主要的切削方式,(1)飛刀(Fly Cutter)切削(2)蝸桿型滾 刀(Worm-Type Hob Cutter)滾削。這兩種切削方式基本上都是模擬蝸桿與蝸 輪嚙合之情形來切製出蝸輪齒面。用飛刀切削蝸輪時,飛刀之外形與蝸桿 之法向齒形相同;用滾刀切削蝸輪時,滾刀之外形可與蝸桿外形相同。因 此,根據滾刀與蝸輪之間的滾削機構關係及蝸桿型滾刀的刀面方程式,配 合2.4 節所述之嚙合方程式,即可推導出蝸輪之齒面方程式。本章首先根據 蝸輪之滾削機構建立其數學模式,同時利用方程式(2.6)推導滾刀與蝸輪之 相對運動速度。最後再根據ZN 型滾刀之刀面方程式、滾削機構之數學模式 及嚙合方程式,推導出蝸輪之齒面數學模式。 4.2 蝸輪之滾削機構 不同型式的蝸桿蝸輪組在創成蝸輪時,其所需使用之滾刀型式也不相 同,但是其滾削之機構則相同。因為蝸輪之齒面可用一把與蝸桿外形相同 之滾刀滾削而成,所以可根據兩者之間的滾削機構關係及蝸桿型滾刀的刀 面方程式,推導出蝸輪之齒面方程式。圖 4-1 為蝸輪滾削模擬機構之示意 圖,座標系Sh(Xh , Yh , Zh)與 S2(X2 , Y2 , Z2)分別為固聯於蝸桿型滾刀與蝸輪 之座標系,而座標系So(Xo , Yo , Zo)與 Sg(Xg , Yg , Zg)則分別為蝸桿型滾刀與 蝸輪之參考座標系,Zh 為蝸桿型滾刀之旋轉軸,Z2 軸為蝸輪之旋轉軸,γ 為兩旋轉軸之交錯角(Crossed Angle),而 S 則為兩旋轉軸之最短距離,Δh 為蝸桿型滾刀在蝸輪旋轉軸Zg方向之偏移量,φ與φg則分別為蝸桿型滾刀
X Z O X Y Y Z O M γ Δh O M = S Z , Z g 2 Y2 Yg X2 Xg g O , O g 2 O , O o h X o X h Y o Y h Z , Z o h
圖
4-1 蝸輪之滾削模擬機構示意圖
(a)
(b)
(c)
與蝸輪在切削過程中之旋轉角度。因此,蝸桿型滾刀的刀面軌跡方程式, 可依據蝸輪滾削機構關係示意圖及下列之齊次座標轉換矩陣方程式表示於 S2(X2 , Y2 , Z2)座標系如下:
[
M h]
Rh R2 = 2 (4.1) 其中Rh與R2分別為蝸桿型滾刀之刀面方程式表示於座標系 Sh(Xh , Yh , Zh) 與S2(X2 , Y2 , Z2)。而齊次座標轉換矩陣[
M2h]
可由圖 4-1 之座標系之關係求 得如下:[ ] [
][
][
]
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ − − − − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ − − − ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = = 1 0 0 0 cos cos sin sin sin sin sin cos cos sin sin 1 0 0 0 0 1 0 0 0 0 cos sin 0 0 sin cos 1 0 0 0 cos sin 0 0 sin cos 0 0 0 1 1 0 0 0 0 1 0 0 0 0 cos sin 0 0 sin cos 22 21 12 11 2 2 h S a a S a a h S M M M M g g g g g g g g oh go g h γ φ γ φ γ φ γ φ φ γ φ φ φ φ φ γ γ γ γ φ φ φ φ (4.2) 其中φ
φ
φ
γ
φ
φ
φ
φ
γ
φ
φ
φ
φ
γ
φ
φ
φ
φ
γ
φ
sin sin cos cos cos cos sin sin cos cos sin cos cos cos sin cos cos sin cos sin 12 21 12 11 g g g g g g g g a a a a + = − = − = + = 而蝸桿形滾刀與蝸輪旋轉軸之最短距離S 可由下式求得: 2S
=
r
h+
r
(4.3) 其中 rh與 r2分別為蝸桿型滾刀與蝸輪之節圓半徑。由於蝸輪與蝸桿型滾刀 在切削過程中為共軛運動對,因此兩者之旋轉角φ與φg應滿足下列關係式: φ φ ω ω φ g o g N N = = 1 2 (4.4)其中No與Ng分別為蝸桿型滾刀之牙口數與蝸輪之齒數。至於蝸桿型滾刀之 刀面法向量方程式表示於S2(X2 , Y2 , Z2)座標系,則可利用下列向量轉換矩 陣求出:
[ ]
L h Nh N2 = 2 (4.5) 其中 Nh與 N2分別為蝸桿型滾刀之刀面法向量方程式表示於座標系 Sh(Xh , Yh , Zh)與 S2(X2 , Y2 , Z2)。而向量轉換矩陣[ ]
L2h 則可由方程式(4.2)之[
M2h]
座標轉換矩陣消去最後一行及最後一列而得,即[ ] [
][
][
]
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − = = γ φ γ φ γ γ φ γ φ cos cos sin sin sin sin cos sin sin 22 21 12 11 2 2 g g oh go g h a a a a L L L L (4.6) 其中的a11、a12、a21與a22其定義與方程式(4.2)中之定義相同。 從圖 4-1 蝸桿型滾刀與蝸輪之滾削模擬機構示意圖,可求得蝸桿型滾刀 與蝸輪之相對運動速度,並將此相對運動速度表示於 Sh(Xh , Yh , Zh)座標 系。假設蝸桿型滾刀之旋轉角速度為ω
h,則ω
h在Sh(Xh , Yh , Zh)座標系之 向量表示式如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = h h ω 0 0 ω (4.7) 而蝸輪之旋轉角速度ω
g表示於Sh(Xh , Yh , Zh)座標系則可由下列之向量轉 換式求得:h gh gh gh g g m -m -m ω γ γ φ γ φ ω γ γ γ γ φ φ φ φ cos sin cos sin sin 0 0 cos sin 0 sin cos 0 0 0 1 1 0 0 0 cos sin 0 sin cos ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = ω (4.8) 其中mgh為滾刀與蝸輪之轉速比,可由下列關係式求得: g o g h g gh N N m = = = φ φ ω ω (4.9) 同理,由兩座標系之原點Og至Oh之向量R 表示於座標系 Sh(Xh , Yh , Zh), 可由下列關係式求得: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ − Δ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ Δ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = γ γ φ φ γ φ φ γ γ γ γ φ φ φ φ cos sin cos sin sin sin cos 0 cos sin 0 sin cos 0 0 0 1 1 0 0 0 cos sin 0 sin cos h h -S h -S h S R (4.10) 若蝸桿型滾刀之位置向量表示於座標系Sh(Xh , Yh , Zh)為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = h h h h z y x R (4.11) 將Rh及方程式(4.7)到(4.10)代入方程式(2.6)之相對運動通式,便可求得蝸桿 型滾刀與蝸輪之相對運動速度V(12) 表示在 Sh(Xh , Yh , Zh)座標系如下:
(
)
(
)
(
)
(
)
(
)
(
h h)
gh h gh h h gh gh h h gh h gh gh gh h h h gh gh gh g h h m x y S m z S x m m z S y m m -m -m h h -S h -S z y x m -m -m ABω
γ
φ
φ
γ
φ
γ
φ
γ
γ
φ
γ
φ
γ
ω
γ
γ
φ
γ
φ
γ
γ
φ
φ
γ
φ
φ
γ
γ
φ
γ
φ
sin cos sin sin sin cos cos cos 1 sin cos cos sin 1 cos cos sin cos sin sin cos sin cos sin sin sin cos cos sin cos sin sin 1 0 0 g ) ( ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + − + − + + − = ⎪ ⎭ ⎪ ⎬ ⎫ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ × ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ − Δ − ⎪ ⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ × ⎟⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎝ ⎛ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = × − × − = ω ω R R ω V (4.12) 4.3 ZN 型蝸輪之齒面數學模式 由於蝸輪之齒面是由一把蝸桿型的滾刀滾削而成,因此兩者為共軛運 動對,其接觸為線接觸。因此,須先求得ZN 型蝸桿型滾刀表示在蝸輪座標 系S2(X2 , Y2 , Z2)之軌跡方程式,再與蝸桿型滾刀和蝸輪之間的嚙合方程式 聯立後,便可推導出ZN 型蝸輪之齒面方程式。茲將蝸桿型滾刀之左右刀面 方程式(3.6)和(3.7)式代入方程式(4.1),便可得到蝸桿型滾刀表示在蝸輪座標 系S2(X2 , Y2 , Z2)之軌跡方程式如下: 蝸桿左齒面之軌跡方程式為 ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ − − − − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 0 0 0 cos cos sin sin sin sin sin cos cos sin sin 1 ) ( 1 ) ( 1 ) ( 1 22 21 12 11 ) ( 2 ) ( 2 ) ( 2 L L L g g g g R R R z y x h S a a S a a z y x γ φ γ φ γ φ γ φ φ γ φ (4.13)蝸桿右齒面之軌跡方程式則為 ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ − − − − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 0 0 0 cos cos sin sin sin sin sin cos cos sin sin 1 ) ( 1 ) ( 1 ) ( 1 22 21 12 11 ) ( 2 ) ( 2 ) ( 2 R R R g g g g L L L z y x h S a a S a a z y x γ φ γ φ γ φ γ φ φ γ φ (4.14) 而將 ZN 型蝸桿型滾刀之刀面法向量方程式(3.14)和(3.17)式代入方程式 (4.5),即可得到 ZN 型蝸桿型滾刀之刀面法向量表示在蝸輪座標系 S2(X2 , Y2 , Z2)如下: 蝸桿左齒面之法向量為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 1 22 21 12 11 2 2 2 ) ( ) ( ) ( ) ( ) ( ) ( cos cos sin sin sin sin cos sin sin L z L y L x g g R z R y R x N N N a a a a N N N γ φ γ φ γ γ φ γ φ (4.15) 蝸桿右齒面之法向量則為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 1 22 21 12 11 2 2 2 ) ( ) ( ) ( ) ( ) ( ) ( cos cos sin sin sin sin cos sin sin R z R y R x g g L z L y L x N N N a a a a N N N γ φ γ φ γ γ φ γ φ (4.16) 由於蝸桿型刀具在創成蝸輪時係蝸桿型滾刀之左刀面創成蝸輪之右齒面, 因此,若將方程式(3.7)、(3.17)與(4.12)代入方程式(2.7)之嚙合方程式通式, 經簡化後即可得到 ZN 型蝸桿型滾刀之左邊刀面創成蝸輪之右邊齒面的嚙 合方程式如下:
(
b b a c)
a l − + − ⋅ ⋅ ⋅ = 4 2 1 2 1 (4.17)(
)
(
)
(
) (
) (
) (
)
(
) (
) (
) (
)
(
)
[
]
(
)
(
)
[
]
(
)
(
)
(
)
(
)
(
)
( )
(
)
(
)
[
]
1 ) ( 5 1 2 ) ( 4 1 ) ( 3 1 ) ( 2 1 2 1 2 1 2 2 1 2 2 5 ) ( 1 2 1 2 4 1 1 3 1 1 ) ( 2 1 2 1 1 2 1 1 5 4 3 2 1 5 4 3 2 1 2 1 cos sin cos 1 cos sin cos c sin sin sin cos cos sin sin cos sin cos sin 1 cos sin cos 1 cos cos sin sin cos 1 cos sin sin cos sin cos cos cos sin cos sin cos cos sin cos sin sin cos sin sin sin cos sin sin sin cos sin cos sin cos sinα
γ
γ
α
γ
γ
γ
α
β
β
γ
α
β
β
γ
α
γ
β
α
γ
β
α
β
γ
α
β
β
α
γ
γ
γ
β
α
α
α
α
β
γ
γ
β
β
γ
β
β
α
γ
α
γ
β
α
ψ
φ
ψ
ψ
φ
ψ
ψ
φ
ψ
ψ
φ
ψ
ψ
φ
ψ
φ
R t gh gh gh R t gh R t gh R t gh gh gh R t gh gh R t gh gh gh gh r Sm m P c m r PS P m P r c S m P r c P m c S m P m b r S P m b P m b S P r m b P m b m a m a c c c c c c b b b b b b a a a − − ± = + ± = + ± = − ± = = − + − + = + + − = = + − ± = − = = ± = + − + + − + = + − + + − + = − + − = m 其中 同理,蝸桿型刀具之右刀面係用以創成蝸輪之左齒面,因此,若將方程式 (3.6)、(3.14)與(4.12)代入方程式(2.7)之嚙合方程式通式,經簡化後即可得到 ZN 型蝸桿型滾刀之右邊刀面創成蝸輪之左邊齒面的嚙合方程式如下:(
b b a c)
a l − + − ⋅ ⋅ ⋅ = 4 2 1 2 2 (4.18)(
)
(
)
(
) (
) (
) (
)
(
) (
) (
) (
)
(
)
[
]
2 2 2 2 2 1 2 2 2 1 5 4 3 2 1 5 4 3 2 1 2 1 + − ± = − = = ± = + − + + − + = + − + + − + = − + − =α
α
β
γ
γ
β
β
γ
β
β
α
γ
α
γ
β
α
ψ
φ
ψ
ψ
φ
ψ
ψ
φ
ψ
ψ
φ
ψ
ψ
φ
ψ
φ
cos sin cos cos sin cos sin sin cos sin sin sin cos sin sin sin cos sin cos sin cos sin ) ( P S r m b P m b m a m a c c c c c c b b b b b b a a a L t gh gh gh gh 其中(
)
(
)
[
]
(
)
(
)
(
)
(
)
(
)
( )
(
)
(
)
[
]
2 5 2 2 2 3 2 2 2 2 1 2 2 2 2 2 2 2 5 2 2 2 2 4 2 2 3 − − 1 ± = + ± = + ± = − ± = = 1 − + − 1 + = + 1 + − = =α
γ
γ
α
γ
γ
γ
α
β
β
γ
α
β
β
γ
α
γ
β
α
γ
β
α
β
γ
α
β
β
α
γ
γ
γ
β
α
α
cos sin cos cos sin cos c sin sin sin cos cos sin sin cos sin cos sin cos sin cos cos cos sin sin cos cos sin sin cos sin cos cos cos sin ) ( ) ( 4 ) ( ) ( ) ( L t gh gh gh L t gh L t gh L t gh gh gh L t gh gh r Sm m P c m r PS P m P r c S m P r c P m c S m P m b r S P m b P m b m 由(4.17)及(4.18)式可知,蝸輪與蝸桿型滾刀之嚙合方程式均為二次方程式 解,由於在此考慮之蝸桿與蝸輪均為右螺旋,因此方程式(4.17)與(4.18)僅需 要取其中加號之解即可。若將方程式(4.13)與(4.17)聯立,即為 ZN型蝸輪之 右齒面方程式;若將方程式(4.14)與(4.18)聯立,即為 ZN型蝸輪之左齒面方 程式。而將方程式(4.15)與(4.17)聯立,即為 ZN型蝸輪之右齒面法向量方程 式;將方程式(4.16)與(4.18)聯立,即為 ZN型蝸輪之左齒面法向量方程式。 茲有兩滾刀與蝸輪之主要設計參數及數據,如表4-1所示。根據方程式 (4.13)、(4.14)、(4.17)與(4.18),即可繪出 ZN型蝸輪之完整齒面,如圖4-3 所示,圖中對稱齒形與非對稱齒形之相交點,則為蝸輪之節點。 此外,為了減小ZN型蝸輪之齒根部分產生之應力集中,可利用 ZN型 蝸桿型滾刀在ZN型蝸輪之齒形創成齒根導角(Dedendum Fillet)。根據第三 章所推導之ZN型蝸桿創成模式,並將車刀修改如圖4-2 所示,如此可推導 出具有齒頂導角之蝸桿型滾刀之數學模式,利用此具有齒頂導角之ZN型蝸 桿型滾刀,配合4.3節之 ZN型蝸輪創成模式,即可推導出具齒根導角之 ZN型蝸輪齒面。l1,min l1,max
α
1 1 lr
t (R) Oc Zc Xc l2,min l2,maxα
2 2 lr
t (L) Oc Zc Xc C1 C2 C1 C2f
f
α
1α
2α
2α
1θ
2θ
1圖
4-2 具齒根導角之切削刀具
(a)
(b)
表
4-1 滾刀與蝸輪之主要設計參數
齒形 對稱齒形 非對稱齒形 齒面 滾刀左刀面 滾刀右刀面 滾刀牙口數 N0 1 1 蝸桿齒數 N1 33 33 軸向模數 M 8.50 mm 8.50 mm 滾刀節圓半徑 r1 39.75 mm 39.75 mm 滾刀外徑 r1o 48.25 mm 48.25 mm 滾刀根徑 r1f 28.7 mm 28.7 mm 滾刀法向壓力角 α 20.000° 20° 25° 滾刀與蝸輪之中心距 S 180.00 mm 180.00 mm 滾刀與蝸輪之交錯角 γ 90° 90° 滾刀外徑 r2o 155.00 mm 155.00 mm 蝸輪喉徑 r2t 31.25 mm 31.25 mm 蝸輪齒面寬 28.70 mm 28.70 mm 蝸輪齒根導角參數f
0.85 mm 0.85mm第五章
蝸桿與蝸輪之齒面接觸分析
5.1 介紹 在前面的章節中,已經推導出非對稱齒形之ZN型蝸桿與蝸輪的齒面數 學模式,而本章將針對上述之蝸桿蝸輪進行齒面接觸分析。首先根據蝸桿 與蝸輪的嚙合機構,建立其嚙合機構之數學模式並模擬其接觸情況,同時 亦根據蝸桿與蝸輪嚙合時之齒面特性,推導出蝸桿與蝸輪之嚙合條件式並 求出其齒面接觸軌跡與運動誤差。隨後利用蝸桿與蝸輪在接觸點兩齒面相 切的特性以及座標轉換的理論,配合兩曲面接觸時齒面嚙合條件式而可求 出蝸輪齒面上之接觸情形。 5.2 蝸桿與蝸輪之嚙合模擬 蝸桿與蝸輪在模擬嚙合的過程中,兩者之齒面位置向量與齒面法向量 須表示在同一座標系,以比較兩嚙合齒面之位置向量及齒面法向量是否相 同。因此,根據嚙合機構所推導之座標轉換,分別將蝸桿之齒面位置向量 與齒面法向量以及蝸輪之齒面位置向量與齒面法向量轉換至相同的參考座 標系,由於兩齒面嚙合時,其齒面位置向量必相同且齒面法向量亦相同或 呈相反方向,此即為兩齒面接觸嚙合之條件式。故若將兩嚙合齒面之位置 向量與齒面法向量代入齒面接觸嚙合條件式,如此即可求得其接觸軌跡與 嚙合運動誤差。Xg Xw Yw Yg Ow M γ Δh O M = Sg Z , Z g 2 Y2 Yg X2 Xg g O , O g 2 O , O w 1 X w X 1 Y w Y 1 Z , Z w 1 Z , Z w 1 Z , Z g 2 O , O g 2 w h
圖
5-1 蝸桿與蝸輪之嚙合模擬機構示意圖
(a)
(b)
(c)
5.2.1 蝸桿與蝸輪之嚙合機構 根據蝸桿與蝸輪之嚙合模擬機構,可將其座標系關係表示如圖5-1。座 標系S1(X1 , Y1 , Z1)與 S2(X2 , Y2 , Z2)分別為固聯於蝸桿與蝸輪之座標系,而 座標系Sw(Xw , Yw , Zw)與Sg(Xg , Yg , Zg)分別為蝸桿與蝸輪之參考座標系, Z1軸 為蝸桿之旋轉軸,Z2 軸為蝸輪之旋轉軸,γw 為蝸桿與蝸輪旋轉軸之交錯角 (Crossed Angle),Sh則為Og點至 M點之距離,而φ′與φg′則分別為蝸桿與蝸 輪嚙合運動之旋轉角度。根據圖5-1所示的蝸桿蝸輪嚙合機構示意圖,蝸桿 齒面之位置向量可利用下列之齊次座標轉換矩陣表示於Sw座標系中:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
′
+
′
′
−
′
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
′
′
′
−
′
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
1
cos
sin
sin
cos
1
1
0
0
0
0
1
0
0
0
0
cos
sin
0
0
sin
cos
1
1 1 1 1 1 1 1 1 1 1 1z
y
x
y
x
z
y
x
z
y
x
w w wφ
φ
φ
φ
φ
φ
φ
φ
(5.1) 同理,蝸桿之齒面法向量則可利用下列之向量轉換矩陣表示於Sw座標系中:⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
′
+
′
′
−
′
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
′
′
′
−
′
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
1 1 1 1 1 1 1 1 1 1 1cos
sin
sin
cos
1
0
0
0
cos
sin
0
sin
cos
z y x y x z y x zw yw xwN
N
N
N
N
N
N
N
N
N
N
φ
φ
φ
φ
φ
φ
φ
φ
(5.2) 而蝸輪齒面之位置向量,亦可利用下列之齊次座標轉換矩陣表示於Sw座標 系中:[
]
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 2 2 2 2 2 2 2 z y x M z y x w w w w (5.3)其中齊次座標轉換矩陣
[
Mw2]
則可表示如下:[
]
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ − − ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ′ ′ ′ − ′ = 1 0 0 0 0 cos sin 0 sin cos 0 0 0 1 1 0 0 0 0 1 0 0 0 0 cos sin 0 0 sin cos 2 w w w w h g g g g w h S Mγ
γ
γ
γ
φ
φ
φ
φ
(5.4) 將(5.4)式座標轉換矩陣[
Mw2]
代入方程式(5.3)中,經簡化可得到表示 Sw 座標系之蝸輪齒面方程式如下: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ′ Δ − ′ − ′ ′ ′ Δ + ′ ′ ′ − ′ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 1 0 0 0 0 cos sin 0 cos sin cos cos cos sin sin cos sin sin cos sin cos 1 2 2 2 2 2 2 z y x h h S z y x w w w g w g g g h w g w g g w w wγ
γ
φ
γ
φ
γ
φ
φ
φ
φ
γ
φ
γ
φ
φ
(5.5) 而蝸輪之齒面法向量,亦可利用下列之向量轉換矩陣表示於Sw座標系中:⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
′
−
′
′
′
′
−
′
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
2 2 2 2 2 2cos
sin
0
sin
cos
cos
cos
sin
sin
sin
cos
sin
cos
z y x w w w g w g g w g w g g zw yw xwN
N
N
N
N
N
γ
γ
γ
φ
γ
φ
φ
γ
φ
γ
φ
φ
(5.6) 5.2.2 蝸桿與蝸輪之嚙合條件式 由於蝸桿與蝸輪在嚙合時,兩者齒面恆保持在相切的狀態,故在蝸桿 與蝸輪嚙合之接觸點其齒面必需滿足下列兩個條件:(1)齒面位置向量相 同。(2)齒面之法向量相同或互相平行。因此,蝸桿與蝸輪之嚙合條件式可 表示如下: 0 2 1 − w = w x x (5.7)0 2 1− w = w y y (5.8) 0 2 1 − w = w z z (5.9) 0 2 1 2 1⋅ xw − xw ⋅ zw = zw N N N N (5.10) 0 2 1 2 1⋅ zw − zw ⋅ yw = yw N N N N (5.11) 若將 5.2.1 節所推導之蝸桿與蝸輪表示於 Sw座標系之齒面位置向量與齒面 法向量,代入上述之蝸桿與蝸輪齒面嚙合條件式,即求解方程式(5.7)至(5.11) 之聯立方程式,便可得知蝸桿與蝸輪之嚙合接觸點。蝸桿與蝸輪之每一嚙 合接觸點均包含兩個蝸桿齒面參數、三個蝸輪齒面參數及蝸桿與蝸輪各一 個運動參數,亦即共有七個未知數。故令蝸桿之旋轉角度