運用過濾器方法之低耗電分支目標緩衝器的設計
Design of Low-Power Branch Target Buffer Using Filter Scheme
馬永昌 國立台灣海洋大學資訊工程學系 Email: ycmaa@mail.ntou.edu.tw 李冠侖 國立台灣海洋大學資訊工程學系 Email: M96570052@mail.ntou.edu.tw 郭書銘 國立台灣海洋大學資訊工程學系 Email: M96570033@mail.ntou.edu.tw 摘要―本篇論文中,我們將快取記憶體過濾器的概念 應用到處理器中分支預測器(Branch Predictor)之分支目
標緩衝器(Branch Target Buffer)設計。使用過濾器概念可
以減少分支目標緩衝器的存取動作以降低動態耗電,本篇 論文提出分支目標緩衝器的設計方法,不僅可以維持分支 預測的準確度與處理器管線架構高效能運作,並且達到省 電的效果。 我們使用內容可定址記憶體(CAM)來設計過濾器,並 且使用HSPICE、CACTI 等工具來確認過濾器電路不影 響處理器管線中指令擷取部分之關鍵電路延遲。根據 SimpleScalar/Wattch 與 SPEC2K 等工具為基礎的實驗結 果顯示,在不犧牲分支預測準確度與處理器效能的前提 下,分支目標緩衝器動作減少達到 85%,分支預測單元 省電達16% - 55%,分支目標緩衝器省電達 18% - 75%。 關鍵詞―低耗電、分支目標緩衝器、過濾器方法、哨 兵表
Abstract-In this paper we apply Sentry Tag based
filter scheme to the design of branch target buffer (BTB) of branch predictor in modern processors. The filter scheme filtrates unnecessary accesses of branch target buffer to reduce dynamic power consumption. The proposed scheme not only maintains high branch prediction accuracy and thus high pipeline utilization for processors, but also attains considerable power saving.
We use Content-Addressable Memory (CAM) to design the filter scheme and utilize HSPICE and CACTI tools to make sure the proposed scheme’s critical path delay of processor instruction fetch of pipeline is not affected. Based on SimpleScalar/Wattch simulators and SPEC2K benchmarks, we show that our scheme can filter up to 85% of branch target buffer accesses, thus reducing the power consumption for branch prediction unit by 16% - 55%, (the power consumption for branch target buffer by 18% - 75%) without compromising prediction accuracy and processor performance.
Index Terms―Low Power, Branch Target Buffer, Filter
Scheme, Sentry Table
一、緒論
(一) 研究動機與目的 近代處理器為追求高效能,均採用高度管 線化(deeply pipelined)技術設計處理器。在程式 控制流程中,分支指令對於管線化架構的效率 有甚大的影響,因此多數高效能處理器均使用 動態分支預測技術,且運用分支目標緩衝器來 提供有效率的分支處理。 處理器在執行分支指令時,會參考分支目 標緩衝器中所記錄的位址,做為程式計數器下 一次擷取指令的參考位址。每當執行到分支指 令就會查詢一次分支目標緩衝器,若能減少分 支目標緩衝器查詢動作,即可降低分支目標緩 衝器的動態耗電。 在低耗電的研究當中,許多學者研究的方 向 大 致 上 分 為 二 個 部 份 : 動 態 耗 電 (Dynamic/Active power) [1][3][8][21][25][26]以 及靜態耗電(Static/Leakage power) [15][20]。在降 低動態耗電的相關研究中,許多學者提出減少 電路的動作次數 [1][3][8][21],或者使用過濾器 的方法[25][26],以達到省電的目的。而在降低 靜態耗電的相關研究中,有學者提出完全斷電 策略[15][20],當某一部分電路經過一定時間都 沒有被使用到,則可以將電路斷電進入沉睡模 式,以達到省電效果,當有需要用到此電路時, 再將其喚醒。 近年來大部分學者藉由改變電路的架構, 或者增加部份電路,過濾分支目標緩衝器的非 必要存取動作(Unnecessary Activities),以達到省電效果 [1][3][8][21]。其中有學者提出的方法雖 然可以達到省電效果,但是會降低分支預測器 的準確度以及最長路徑延遲 [8][21],所以我們 想設計一種方法,既不影響分支預測器的準確 度 , 而 且 又 能 達 到 省 電 效 果 。 我 們 使 用 SimpleScalar [22] 以 及 Wattch [9] 模 擬 一 顆 Alpha-21264 [19]處理器,我們發現其中分支目 標緩衝器的耗電又佔整體分支預測單元的絕大 部分,如圖1 所示。B-256 即表示分支目標緩衝 器為四路,每路有256 筆內容,採用 Bimodal [13] 分支預測策略,耗電佔整體分支預測單元大約 85%。 圖1 分支目標緩衝器耗電在整體分支預測單 元之比例 本篇論文應用過濾器方法(Filter Scheme), 在分支目標緩衝器過濾非必要存取動作,節省 動態耗電,並進一步分析過濾器結構影響耗電 的相關參數,以便進行低耗電分支目標緩衝器 之設計。 (二) 研究貢獻 本論文的貢獻主要有以下幾點: z 減少處理器的耗電: 利用過濾器的方法,減少分支目標緩衝器 非必要的存取動作,以達到節省電能的效果。 z 保持處理器效能: 在電路上我們雖然增加額外的過濾器電 路,但是並不會影響到整體處理器的效能,因 為經過驗證最長路徑延遲(Critical Path Delay)仍 然小於指令快取記憶體(I-Cache Memory)的存 取時間,不會造成時脈週期延長的後遺症,所 以可以保持處理器效能。 z 低硬體成本: 使用過濾器方法所需額外硬體並不多,額 外硬體(電晶體數)佔整體分支目標緩衝器約 5% 以下。 (三) 論文內容簡述 本篇論文的其餘內容安排如下。第二節會 先介紹相關背景知識與文獻探討,包括分支預 測技術(Branch Prediction Techniques)。第三節介 紹過濾器方法(Filter Scheme)的原理、硬體電路 架構。第四節為模擬實驗結果與討論。最後, 第五節提出本篇論文之結論。
二、相關背景
在 本 節 會 先 介 紹 分 支 預 測 單 元(Branch Prediction Unit)架構與功能,包含分支預測器 (Branch Predictor)以及分支目標緩衝器(Branch Target Buffer)。(一) 分支預測單元(Branch Prediction Unit) 分支預測單元位於處理器管線的前段部 份,當分支位址(Branch Address)進到分支預測 單元,會分成二部份平行處理,一部份是分支 方向預測器(Direction Predictor),另外一部份是 分支目標緩衝器(Branch Target Buffer),如圖 2 所示。
圖2 分支預測單元(Branch Prediction Unit)
由於高效能處理器多採用管線化設計,分 支預測與處理分別在管線化架構的指令擷取階
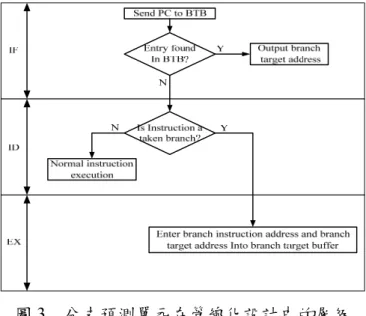
段(IF)、指令解碼階段(ID)以及指令執行階段(EX) 三個層級進行,如圖 3 所示。在指令擷取階段 時,判斷分支位址是否能在分支目標緩衝器搜 尋命中;若是,則會輸出分支目標位址給程式 計數器(PC),當作下一個指令的位址;反之,若 搜尋失誤,則會在指令解碼階段將指令解碼判 斷是否為分支指令,若是分支指令,即會在指 令執行階段時,將分支指令的位址寫入到分支 目標緩衝器。 圖3 分支預測單元在管線化設計中的層級 (二) 方向預測器(Direction Predictor) 分支預測主要的功能就是預測分支指令是 否要跳躍(Taken or Not Taken),主要分支預測策 略有靜態(Static)以及使用硬體分支預測器的動
態(Dynamic) 方 式 , 如 : Bimodal 、 Two-Level
[23]、GShare [24]、Combining Branch Predictors [24]…等等。其中以 Yeh [23]與 McFarling [24]
分別提出 Two-level 以及 Gshare 和 Combining
Branch Predictors 的方法之後,對於整個分支預 測器領域有很大的影響,大大提升了分支預測 器的預測準確率。 靜態分支預測技術 [14]是由程式設計師或 系統軟體(如編譯器)來決定分支是否跳躍,例如 規定所有分支指令跳躍(或不跳躍),或者依照分 支指令的種類來決定,如對迴圈控制指令預測 皆為跳躍。 動態預測技術使用硬體分支預測器來預測 分支指令是否會跳躍,比較具代表性的分支預
測器包含Gselect [24]、Agree [12]、Bi-Mode [6]、
Skewed [17]、Filter [18]、YAGS [4]以及使用類 神經網路(Neural networks)/感知機(Perceptron) 的分支預測器 [7][10][16]。
(三) 分支目標緩衝器(Branch Target Buffer) 分支目標緩衝器(Branch Target Buffer)位於 處理器中,分支目標緩衝器會有一個部分用來 存放由程式計數器(Program Couner)抓取到的指 令位址的數值,再將跳躍分支(taken branch)指令 的目標位置儲存起來,如圖4 所示。 當分支預測器判斷分支指令是跳躍的時 候,即可查詢分支目標緩衝器上目標位址的數 值,而不用等到處理器管線處理的執行階段才 經由運算分支指令位址的結果得到目標位址的 數值。由於可以提前預知目標位址的數值,所 以可以減少分支指令所造成的效能負擔,並且 可以提高程式處理的效能。
圖4 分支目標緩衝器(Branch Target Buffer)
三、過濾器方法
在本節一開始介紹傳統分支目標緩衝器構 造與動作流程,以及定義非必要的存取動作。 再來介紹使用過濾器方法的動機,分析評估所
能改善的過濾率與過濾器方法使用在分支目標 緩衝器的原理,以及過濾器所需要的額外硬體 電路之設計。 (一) 傳統四路集合關聯式分支目標緩衝器 圖 5 為一個傳統的四路集合關聯式分支目 標緩衝器(4-way set-associative BTB),當程式計 數器送出一個分支指令時,會將其分成標籤(Tag) 與索引(Index)兩個部份,索引經過一個解碼器電 路即可辨認此分支指令會落入那一個集合(Set) 中,再將此集合中的四個標籤與分支指令的標 籤做平行比對,比對完的結果再送到多工器 (MUX),多工器即可判定是否命中(Hit)或是失誤 (Miss) , 若 是 命 中 即 送 出 目 標 位 址 (Target Address)。 圖5 傳統四路集合關聯式分支目標緩衝器 由於上述中,我們提到傳統四路集合關聯 式分支目標緩衝器的構造,現在來分析它的特 性。每當程式計數器傳送一個分支位址(Branch Address)時,在分支目標緩衝器都要同時到每一 個路(Way)中取出標籤來比對。在這裡我們定義 非必要存取動作,如果以命中來說,則會有三 個路的動作是在做非必要的存取動作;倘若以 失誤來說,則是四個路的動作是非必要的存取 動作,而這些非必要的存取動作將會導致耗 電。我們觀察到在分支目標緩衝器中的非必要 存取動作會導致耗電,所以我們利用 [25]的過 濾器方法,來改善非必要存取動作的發生次 數,進一步達到省電的效果。 (二) 過濾器方法使用在分支目標緩衝器的原理 圖 6 為一個傳統分支位址,使用過濾器方 法來設計一個新的分支目標緩衝器硬體架構。 我們改變傳統分支位址的表示方式,在標籤這 一個欄位中移出部份的位元(bit)並且給予一個 新的名稱哨兵位元(Sentry bit) [25]。圖 7 是使用 哨兵位元之後的分支位址結構,其中 S 代表的 即是哨兵位元,圖 8 為使用哨兵位元的分支目 標緩衝器架構。 圖6 傳統分支位址結構 圖7 使用哨兵位元之後的分支位址結構 圖8 使用哨兵位元之後分支目標緩衝器架構 過濾器方法的精神是過濾掉在每一個路中 的非必要存取動作,現在介紹哨兵位元在過濾 器方法中的功能與概念。哨兵位元是由標籤裡 面擷取的一部份,所以哨兵位元是標籤的一個 子集合(Subset)。當一個分支位址進到分支目標 緩衝器的時候,我們設計讓哨兵位元這一部份 的標籤與分支位址相對應的位元先做比對的動 作。假如在哨兵位元這一部份比對命中,則表 示整體標籤有可能會存在分支目標緩衝器中, 所以會繼續比較剩餘標籤(即是不包含哨兵位元 的位元),再判定整體標籤是否會是命中或失
誤;倘若在哨兵位元這一部分發生失誤,則表 示整體的標籤比對一定是失誤,故不需要再到 分支目標緩衝器去比對剩餘的標籤是否相等, 即表示可以過濾掉非必要的存取動作。 (三) 過濾率與平均存取動作的分析 在上一節中我們談到過濾器方法的概念, 現在來分析過濾率與平均存取動作,由概念得 知當哨兵位元的位元數取的越多,則過濾率會 是越好,因為要比對的數目變多,排列組合的 結果也跟著變多。例如:哨兵位元從標籤中取 一個位元,當相對應分支位址的位元值是’1’, 此時在哨兵位元中的值可能是’0’或是’1’,即表 示過濾率大約是50 %;倘若哨兵位元從標籤中 取 二 個 位 元 , 當 相 對 應 分 支 位 址 的 位 元 值 為 ”10” , 此 時 在 哨 兵 位 元 中 的 值 可 能 是”00”、”01”、”10”和”11”其中的一種情況,即 表示過濾率大約是75 %。 平均存取動作的分析 但是在實際分支目標緩衝器過濾率的分析 還要考慮到分支目標緩衝器的命中率(Hit Rate 或 HR)以及分支目標緩衝器關聯度是多少個 路,下面使用機率統計方法來定義平均存取動 作次數。 分支目標緩衝器命中時: 在一個W 路分支目標緩衝器中,哨兵位元 有 B 位元,當一個分支指令在分支目標緩衝器 搜尋命中時,即是在整體標籤在其中一個路完 全 命 中 , 也 代 表 這 一 個 路 在 哨 兵 表(Sentry table)[3]當中的 B 個位元也是命中的,所以基本 上就會有一個路是需要動作的。而其他 W-1 路 在哨兵表當中的 B 個位元可能命中也可能是失 誤。由於哨兵位元擷取整體標籤的其中B 位元, 故 有 2Β 種 狀 況 , ”00…00” 、 ”00…01” 、 … 、 ”11…10” 和”11…11”, 這 W-1 路的動作次數為 Β
2
1
, 當 分支目標緩衝器為命中時,定義動作次數為: (1+(W-1)× Β2
1
) (1)
分支目標緩衝器失誤時: 在一個W 路分支目標緩衝器中,哨兵位元 為 B 位元,當一個分支指令在分支目標緩衝器 搜尋失誤時,即是在整體標籤在其W 路都無完 全命中,也代表這W 路在哨兵表當中的 B 個位 元可能命中也可能是失誤。由於哨兵位元擷取 整 體 標 籤 的 其 中 B 個 位 元 , 故 有2
Β 種 狀 況 , ”00…00” 、 ”00…01” 、 … 、 ”11…10” 和”11…11”,這 W 路的動作次數為 Β2
1
, 分支 目標緩衝器失誤時,動作次數為: W× Β2
1
(2) 利用(1)與(2)再加上命中率,我們可以定義 出平均存取動作的次數,如下列: WAve=HR × ( 1+( W-1) × Β2
1
) + ( 1-HR) × W × Β2
1
= HR+ B W HR 2 × - B HR 2 + B W 2 - B W HR 2 × = B W 2 +( 1- B 1 2 ) × HR (3) WAve:所有關聯度的平均存取動作 HR:命中率 W:分支目標緩衝器的關聯度 B:從標籤中取得的哨兵位元的位元數目 過濾率的分析 接下來要分析以哨兵表為過濾方法的分支 目標緩衝器之過濾率,再這裡過濾率的定義是:FR= W W -W Ave (4) FR:過濾率(Filter Rate) W:傳統分支目標緩衝器的平均存取動作 WAve:使用過濾器方法分支目標緩衝器的 平均存取動作 (四) 過濾器方法硬體電路設計 這一節開始討論過濾器方法所需要的硬體 電路,由於在前二節有討論過傳統分支目標緩 衝器架構以及動作流程,由圖 5 增加哨兵表之 後的電路示意圖,如圖 8 所示。將原本的分支 位址中的標籤分割出一小部份當作哨兵位元, 把這些分割出來的哨兵位元收集起來成為哨兵 表,當分支位址到來時,會先在哨兵表中做比 對動作,比對結果如果是命中,則會繼續往右 半部份相對應的分支目標緩衝器繼續做標籤比 對;倘若結果是失誤,則相對應的分支目標緩 衝器則是無動作。 哨兵表實際上是一個內容可定址記憶體 (CAM)的架構,因為內容可定址記憶體有快速比 對的功能,而且使用有規律性的內容可定址記 憶體電路來實作較為輕鬆,如圖 9 所示。針對 內容可定址記憶體電路的詳細分析以及模擬, 我們會在第四章節的時候討論。 圖9 CAM 電路的詳細架構
四、模擬實驗結果與討論
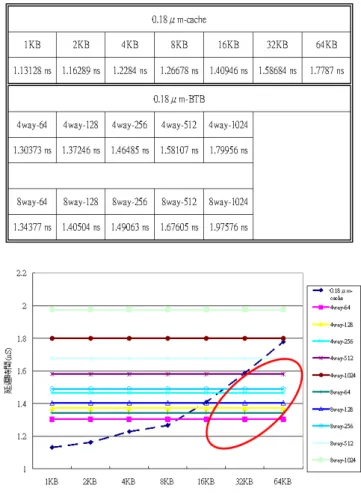
本節介紹本論文所提使用過濾器方法之分 支目標緩衝器設計,模擬評估環境結果及討論 實 驗 相 關 數 據 與 成 果 。 本 篇 論 文 使 用 SimpleScalar [22] 以 及 Wattch [9] 模 擬 Alpha-21264 [19]架構,相關組態設定如表 1 所 示。使用 SimpleScalar 所執行的標竿程式是 SPCE2000 [27],每一組標竿程式皆執行五億個 指令。在電路延遲的分析上則使用 CACTI [11] 與HSPICE [2],因為 CACTI 是針對於快取記體 設計的分析軟體,快取記憶體與分支目標緩衝 器的構造並不完全相同,而且在CAM 的分析上 也 不 能 完 全 依 賴 CACTI , 所 以 我 們 選 用 HSPICE。在功率方面的計算則是沿用 CACTI 以及Wattch,Wattch 當中也包含了舊版的 CACTI 功率計算方式,所以我們也用較新的CACTI 當 作輔助來幫忙計算功率消耗。 表1 相關組態參數設定 (一) 對最長路徑的影響 本節主要探討使用過濾器方法所需額外的 電路,以及哨兵表所造成的電路延遲效果,是 否會影響到管線化中指令擷取所需的時脈週期 數。圖10 是管線化中指令擷取階段的電路,路 徑 1 是指令快取記憶體的延遲路徑,路徑 2 是 分支目標緩衝器加上哨兵表之後的電路延遲路 徑,而接下來我們要比較兩路徑的延遲時間。我們使用CACTI 工具來計算指令快取記憶 體與分支目標緩衝器的電路延遲時間,再利用 HSPICE 模擬哨兵表的延遲時間。哨兵表每一個 路我們使用 3bit 的哨兵位元來儲存資料,所以 會有3 個 CAM 架構的 SRAM,如圖 11 所示。 應用3bit 的哨兵表是參考張延任教授 [26]之前 分 圖10 管線化中指令擷取階段的電路 析的結果,由圖12 可以觀察出,在大於 3bit 之 後過濾率曲線斜率開始平緩,我們沿用其研究 成果,所以我們選擇使用 3bit 當作哨兵表的位 元數。 圖11 哨兵表結構圖 圖12 哨兵表的位元數與過濾率之間關係圖 我們使用Virtuoso 工具 [2]畫出哨兵位元電 晶體階層的硬體電路圖,如圖13 所示。再將電 路圖轉換成HSPICE 可以模擬的 SP 類型檔案。 最後使用 HSPICE 模擬電晶體階層的硬體電路 延遲時間,如圖16 所示。我們發現哨兵表的延 遲時間大約為0.08 nS 左右,與之前張延任教授 [2]分析出來的延遲時間大略相同。 我們另外使用CACTI 工具模擬不同組態的 指令快取記憶體與分支目標緩衝器(包含哨兵表) 的延遲時間,例如:64K 快取記憶體延遲時間 大約為1.779 ns, 4Way-512 的分支目標緩衝器 (包含哨兵表)延遲時間大約為 1.581 ns,如圖 14 所示。最後把所有分支目標緩衝器(包含哨兵表) 和快取記憶體的延遲時間做統整,如圖15 與表 2 所示。0.18 μm-cache 代表快取記憶體的延遲時 間,分別表示快取記憶體為1KB、2KB、4BK、 8KB、16KB、32KB、64KB,故呈現曲線狀, 另外每一個橫軸代表分支目標緩衝器(包含哨兵 表)的延遲時間。 圖13 使用 Virtuoso 工具畫出 CAM 電路架構 圖14 使用 CACTI 工具執行結果
表2 不同組態的快取記憶體與分支目標緩衝 器之間延遲時間關係 圖15 不同組態的快取記憶體與分支目標緩衝 器之間延遲時間關係 圖16 HSPICE 模擬結果波形圖 (二) 哨兵表額外面積 在本節我們討論使用哨兵表之後,硬體電 路增加的效應。哨兵表的內容是由原本的分支 目標緩衝器的標籤中取出,並且放置到哨兵表 中,之後分支目標緩衝器的標籤即減少被取出 的位元數目。在面積計算的方面,我們使用電 晶體數目來評估。使用哨兵表的方法大約會使 得電晶體增加4% ~ 5%,依據不同的分支目標 緩衝器組態,所增加的電晶體數目也不相同。 在此我們先定義一些變數,如下: NTag:標籤的位元數目 NAddr:位址的位元數目 NWay:集合關聯度的數目 NSet:每一路有的集合數目 NS-bit:哨兵位元的數目 在原始的分支目標緩衝器是以SRAM 6T 的 架構組成,所以電晶體總數為:
NBTB:(NTag+NAddr) × NWay × NSet × 6 (5)
由於我們使用CAM 9T 的架構設計哨兵表
(以下簡稱 S-table),所以在計算電晶體數目時, 要分成三個部份計算:
NS-table:NS-bit × NWay × NSet × 9
NBTB: (NTag - NS-bit + NAddr) × NWay ×NSet × 6
NANDarray:NWay × NSet × 6 (6)
範例1:
NAddr:32 NSet:256 NWay:4 NS-bit:3
NTag =NAddr - log2 NSet - log2 NWay = 32 - 8 -2 = 22 Orig. BTB (22 + 32) × 4 × 256 × 6 = 331776 Filter BTB NS-table:3 × 4 × 256 × 9= 27648 NBTB: (22 - 3 + 32) × 4 × 256 × 6= 313344 NANDarray:4 × 256 × 6= 2048 Total:347136 電晶體額外增加 (347136- 331776) ÷ 331776=4.6296%
由範例 1 可知當原始分支目標緩衝器為 4W-512 的時候,採用過濾器方法改善動態耗電 的時候,會額外增加大約4.62%的電晶體數目, 詳細各組態所增加電晶體數目請參考圖17。 0.0000% 1.0000% 2.0000% 3.0000% 4.0000% 5.0000% 6.0000% 7.0000% 8.0000% 9.0000% 10.0000% 2W-6 4S 2W-1 28S 2W-256S2W-5 12S 2W-1024S 4W -64S 4W-1 28S 4W-256S4W-5 12S 4W-1 024S 8W-64S8W-128S8W-256S8W-512S8W-1024S 圖17 不同組態分支目標緩衝器使用過濾器方 法所增加硬體電路 (三) 哨兵表過濾效能 觀察圖 15 可以發現在某一些組態(快取記 憶體大小與分支目標緩衝器)時,使用過濾器方 法並不會影響到整體的最常路徑延遲。我們將 這些組態的組合,使用 SimpleScalar 與 Wattch 執行 SPEC2000 的標竿程式,得到個別的過濾 率。我們發現在不同指令快取記憶體大小的情 況之下,如果分支目標緩衝器的大小若是相等 時,則其分支目標緩衝器過濾效果是相同的, 例如指令快取記憶體:64KB、分支目標緩衝器: 4W-256 會與指令快取記憶體:32KB、分支目標 緩衝器:4W-256 過濾效果相同,圖 18 與圖 19 列出所有實際模擬的結果。 (四) 功率節省效果 在 這 個 章 節 討 論 耗 電 相 關 的 問 題 , 在 Wattch 中定義了許多參數,Wattch 提供的耗電 模組從0.4μm ~ 0.1μm 製程,在本論文中我們 使用 0.18μm 製程為基礎,模擬在 0.18μm 功率 消耗,Wattch 的耗電模組在定義分支預測單元 以及分支目標緩衝器如下列公式(7)(8)。
bpred_power = power_btb + power_local_predict + power_global_predict + power_chooser + power_ras (7) power_btb = array_decoder_power + array_wordline_power + array_bitline_power + senseamp_power (8) -0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.7000 0.8000 0.9000 1.0000 4W-64 4W-128 4W-256 4W-512 8W-64 8W-128 8W-256 8W-512 過濾 率 gzip vpr gcc mcf crafty parser eon perlbmk gap vortex bzip2 twolf 圖18 整數標竿程式在不同組態時的實際過濾率 -0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.7000 0.8000 0.9000 1.0000 4W-64 4W-128 4W-256 4W-512 8W-64 8W-128 8W-256 8W-512 過濾 率 wupwise swim mgrid applu mesa galgel art equake facerec ammp lucas fma3d sixtrack apsi 圖19 浮點數標竿程式在不同組態時的實際過濾率 我們定義新的參數,使用過濾器方法後, 分 支 目 標 緩 衝 器 的 耗 電 (Filter_Scheme_ power_btb) 以 及 分 支 預 測 單 元 的 耗 電 (Filter_Scheme_bpred_power),公式如下。 Filter_Scheme_ power_btb = array_decoder_power +
(array_wordline_power * filter rate) + (array_bitline_power * filter rate) + (senseamp_power * filter rate) + S-table_power (9)
Filter_Scheme_bpred_power = Filter_Scheme_ power_btb + power_local_predict + power_global_predict + power_chooser + power_ras (10) 我們將由(7)(10)定義出分支預測單元省電 效率(%) bpred_power_save = 1-(Filter_Scheme_bpred_power/bpred_power ) (11) 我們將由(8)(9)定義出分支目標緩衝器省電 效率(%) power_btb _save = 1-(Filter_Scheme_ power_btb/power_btb ) (12) 最後的模擬結果得到的數據如圖20、圖 21 圖 22 與圖 23 所示。由圖 20 到圖 23 中我們可 以發現,當分支目標緩衝器的組態為八路的時 候,其省電的效能會比四路的分支目標緩衝器 還優秀。原因是八路的分支目標緩衝器比四路 分支目標緩衝器多一倍的耗電量,在相同的分 支預測器組態之下,分支目標緩衝器在整體分 支預測單元的耗電量上就佔有不同的比例。利 用過濾器方法的時候,分支預測單元的省電效 能會與所能節省耗電的部份所佔整體比例相 關,即是分支目標緩衝器耗電比例越大,則過 濾器方法省電效能也會越好。 我們也發現在同樣路數的時候,越多筆數 (entry)的情況之下,省電效能也會下降,原因是 解碼器電路的耗電量在整體分支預測單元中增 加了。在越多通道的分支目標緩衝器中,解碼 器電路耗電量在整體分支預測單元中所佔比例 也會提高,因為過濾器方法不能減少解碼器電 路的動作次數,所以越多通道的時候,使用過 濾器方法的效能會下降。 在總筆數數目為2K 的時候,根據我們實驗 結果,我們會推薦使用 8 路 256 集合的分支目 標緩衝器作為設計方向。 使用過濾器方法的分支目標緩衝器省電效 率在18% - 75% 之間,分支預測單元的省電效 率在 16% - 55% 之間,詳細數據如圖 24 與圖 25 所示。圖 24 與圖 25 皆是所有的標竿程式取 算術平均數所得到的圖。 -10.0000 20.0000 30.0000 40.0000 50.0000 60.0000 70.0000 80.0000 90.0000 100.0000 4W-64 4W-128 4W-256 4W-512 8W-64 8W-128 8W-256 8W-512 省電效 能( %) gzip vpr gcc mcf crafty parser eon perlbmk gap vortex bzip2 twolf 圖20 分支預測單元整體省電效率-INT(%) -10.0000 20.0000 30.0000 40.0000 50.0000 60.0000 70.0000 80.0000 90.0000 100.0000 4W-64 4W-128 4W-256 4W-512 8W-64 8W-128 8W-256 8W-512 省電 效能 (% ) wupwise swim mgrid applu mesa galgel art equake facerec ammp lucas fma3d sixtrack apsi 圖21 分支預測單元整體省電效率-FP(%) -10.0000 20.0000 30.0000 40.0000 50.0000 60.0000 70.0000 80.0000 90.0000 100.0000 4W-64 4W-128 4W-256 4W-512 8W-64 8W-128 8W-256 8W-512 省電 效能 (% ) gzip vpr gcc mcf crafty parser eon perlbmk gap vortex bzip2 twolf 圖22 分支目標緩衝器整體省電效率-INT(%)
-10.0000 20.0000 30.0000 40.0000 50.0000 60.0000 70.0000 80.0000 90.0000 100.0000 4W-64 4W-128 4W-256 4W-512 8W-64 8W-128 8W-256 8W-512 省電效能( %) wupwise swim mgrid applu mesa galgel art equake facerec ammp lucas fma3d sixtrack apsi 圖23 分支目標緩衝器整體省電效率-FP(%) Power Saving 0 10 20 30 40 50 60 70 80 90 100 4W-64 4W-128 4W-256 4W-512 省 電效率 (% ) bpred_power_save power_btb _save 圖24 分支目標緩衝器為四路時各組態省電效率 Power Saving 0 10 20 30 40 50 60 70 80 90 100 8W-64 8W-128 8W-256 8W-512 省電效 率 (% ) bpred_power_save power_btb _save 圖25 分支目標緩衝器為八路時各組態省電效率 五、結論與未來研究方向 本篇論文從硬體的方面來考量,利用簡單的 過濾器架構,減少分支目標緩衝器的存取動作 以降低動態耗電,本篇論文提出分支目標緩衝 器的設計方法,在不犧牲分支預測準確度與處 理器效能並且用低硬體成本(小於5%)的前提 下,分支目標緩衝器動作減少達到85%,分支預 測單元省電達16% - 55%,分支目標緩衝器省電 達18% - 75%。 我們發現在不同的分支目標緩衝器組態之 下,使用過濾器方法的省電效率也都不盡相 同,原因是過濾器方法不能過濾掉解碼器的動 作次數。所以未來研究可以朝向減少解碼器動 作次數,並且觀察程式行為,利用分支指令的 特性,減少解碼器電路與分支目標緩衝器電路 的動作次數,達到更好的省電的效果。 六、參考文獻 [1] 胡耀中,“低耗電分支目標緩衝器”,國立交 通大學資訊工程學系碩士論文,2005. [2] 財團法人國家實驗研究院-晶片系統設計中 心, http://www.cic.org.tw/cic_v13/ [3] 喬偉豪,“低耗電分支目標緩衝器”,國立交 通大學資訊工程學系博士論文,2008.
[4] A. Eden and T. Mudge, “The YAGS Branch
Prediction Scheme”, In Proceedings. 31st International Symposium on Microarchitect- ure, pp. 69–77, Nov. 1998.
[5] B. S. AMRUTUR and M. A. HOROWITZ,
“Fast low-power decoders for RAMs,” IEEE Journal of Solid-State Circuits 36, pp. 1506–1515, 2001.
[6] C.-C. Lee, I.-C. K. Chen, and T. N. Mudge,
“The bimode branch predictor,” in Proceed- ings of the 30th Annual ACM/IEEE International Symposium on Microarchitect- ure, pp. 4 - 13, Dec 1997.
[7] D. A. Jimenez and D. Burger, “Low - Power,
High-Performance Analog Neural Branch Prediction,” Microarchitecture, MICRO-41, 41st IEEE/ACM International Symposium, pp. 447–458, Nov 2008.
[8] D. Parikh, K. Skadron, Y. Zhang, M. Barcella,
and M. Stan, “Power issues related to branch prediction,” In Proceedings. HPCA-8, pp. 233–44, Feb. 2002.
[9] D. Brooks, “Wattch Version 1.02,” in http://
www.eecs.harvard.edu/~dbrooks/wattch-form. html
[10] D. A. Jimenez and Calvin Lin, “Dynamic
branch prediction with perceptrons,” In Proceedings of the 7th International Sympo- sium on High Performance Computer Archi- tecture, pp. 197–206, January 2001.
[11] D. Tarjan. et al., “Cacti 3.2 web interface,” in
http://quid.hpl.hp.com:9081/cacti/
[12] E. Sprangle, R. Chappell, M. Alsup, and Y.
Patt, “The Agree predictor: Amechanism for reducing negative branch history interfere- ence,” In Proceedings of the 24th Annual International Symposium on Computer Archi- tecture, May 1997.
[13] I. Bate and R. Reutemann, “Efficient
Integration of Bimodal Branch Prediction and Pipeline Analysis,” In IEEE Conference on Real-Time Computing Systems and Applica- tions, pp. 39–44, Hong Kong, China. 2005.
[14] J. Lee and A. J. Smith, “Branch prediction
strategies and branch target buffer design,” IEEE Computer, pp. 6–22, January 1984.
[15] K. Flautner, N . S. Kim, S. Martin, D. Blaauw,
and T. Mudge, “Drowsy caches: simple techniques for reducing leakage power,” In Proceeding. International. Symposium. Comp- uter Architecture, Alaska, pp. 219-230, May 2002.
[16] M. Monchiero and G. Palermo, “The
Combined Perceptron Branch Predictor,” Technical Report n. 2004.35, Dept. of Electronics & information Technical Report, Milan, Polytech Institute, Milan, Italy, 2004.
[17] P. Michaud, A. Seznec, and R. Uhlig, “Trading
conflict and capacity aliasing in conditional branch predictors,” In Proceedings of the 24th Annual International Symposium on Comput- er Architecture, pp. 292-303, May 1997.
[18] P. Chang, M. Evers, and Y. Patt, “Improving
branch prediction accuracy by reducing pattern history table interference,” In Proceed- ings of the International Conference Parallel Architecture and Compilation Techniques, pp. 48–57, October 1995.
[19] R. Kessler, “The Alpha 21264 microprocess-
or,” IEEE Micro, 19(2): pp. 24–36,
March/April 1999.
[20] S. Kaxiras, Z. Hu, and M. Martonosi, “Cache
decay: Exploiting generational behavior to reduce cache leakage power,” Proceeding. of International Symposium. Computer Archi- tecture, pp. 240-251, 2001.
[21] Shuai Wang, Jie Hu, and Sotirios G. Ziavras,
“BTB Access Filtering: A Low Energy and High Performance Design,” In Proceeding. of the IEEE Computer Society Annual Sympo- sium on VLSI (ISVLSI 2008), pp. 81 - 86, April 7-9, 2008.
[22] Todd M. et al., “SimpleScalar 3.0,” in http://
www.simplescalar.com/
[23] T.Y. Yeh and Y. N. Patt, “Two-level adaptive
training branch prediction,” In Proceedings of the 24th Annual International Symposium on Microarchitecture, pp. 51-61, November 1991.
[24] S. McFarling, “Combining branch predictors,”
Digital Equipment Corporation, WRL Tech. Note TN-36, 1993.
[25] Y. J. Chang, S. J. Ruan, and F. P. Lai, F,
“Sentry Tag: An Efficient Filter Scheme for Low Power Cache,” In Proceeding. Seventh Asia-Pacific Computer Systems Architectures Conference (ACSAC2002), Melbourne, Au- stralia, pp. 135-140, 2002.
[26] Y. J. Chang, S. J. Ruan, and F. P. Lai, “Design
and analysis of low power cache using two-level filter scheme,” IEEE Transactions on Very Large Scale Integration Systems, vol. 11, pp. 568–580, Aug 2003.
[27] Standard Performance Evaluation Corporation,