Short Paper
__________________________________________________Investigation of Consensus Problem
over Combined Wired/Wireless Network
CHIEN-FU CHENG, SHU-CHING WANG+AND TYNE LIANG
Department of Computer Science National Chiao Tung University
Hsinchu, 300 Taiwan
+Graduate Institute of Informatics
Chaoyang University of Technology Taichung, 413 Taiwan
Wireless networks have become ubiquitous, making combined wired/wireless net-work a popular trend of development in nowadays. Therefore, the Consensus problem in combined wired/wireless network is an important topic. Over the past few years, a con-siderable number of studies have been made on pure wired networks. However, no stud-ies have ever tried to solve the Consensus problem in combined wired/wireless networks. In order to meet the characteristics of combine wired/wireless networks (the limited re-sources have made the computation ability of mobile processors often weaker than that of stationary processors) and reduce the number of rounds of message exchange required, most of the communications and computation overhead must be fulfilled within by the consensus-servers. Therefore, we introduce a hierarchical concept in our system model. Only consensus-servers need to exchange messages and compute the common value. In this paper, we will investigate the Consensus problem in combined wired/wireless net-work to enhance fault-tolerance and reliability. Besides, we also prove our protocol is able to tolerate a maximum number of allowable faulty components with minimum rounds of message exchange required.
Keywords: consensus, byzantine agreement, fault-tolerance, dormant fault, malicious fault,
combined wired/wireless network, secure communication
1. INTRODUCTION
The Byzantine Agreement (BA) [10, 11, 15, 17] and Consensus [1, 8, 14, 17] are two closely related fundamental problems in agreement on a common value in distributed system. The BA problem was first described and solved by Pease, Shostak, and Lamport [11]. In the BA problem, there are n (n ≥ 4) processors in the network, where one proc-essor is designated as the commander that holds an initial value vs. The commander first
sends the initial value vs to all other processors. On receipt of the value vs, each processor
(without the commander) exchanges the received value with other processors. In addition, there is an adversary that controls up to pm (n ≥ 3pm + 1) of the processors and can
arbi-trarily deviate from the designated protocol specification. After ⎣(n − 1)/3⎦ + 1 rounds of message-exchange, a common value can be obtained. More precisely, the BA problem is
defined by the two properties: (1) Agreement: All fault-free processors agree on a com-mon value. (2) Validity: If the source (commander) processor is fault-free, then all fault- free processors agree on the initial value that the source processor sends. That is, only one processor has initial value in the BA problem. After executing BA protocol, each fault-free processor can make the same decision (common value), the common value is necessary to be selected from the initial value or the default value (the default value is predefined).
The difference between the BA problem and Consensus problem is that each proc-essor has its own initial valuein the Consensus problem [17]. Hence, the Consensus problem is defined by these two properties: (1) Consensus: All fault-free processors agree on a common value; (2) Validity: If the initial value of all processors is vi, then all
fault-free processors shall agree on vi. That is, each processor has its own initial value
and the initial value of each processor may be different in the Consensus problem. After executing the Consensus protocol, each fault-free processor can make the same decision (common value), so the common value is necessary to be selected from one of the initial values or the default value (the default value is predefined). In view of the definition of the initial value and the common value, the Consensus problem is solved if n copies of the BA protocol are run in parallel [17]. Through these properties, it can be clearly un-derstood that the BA problem is a special case of the Consensus problem in which only one processor’s initial value is of interest. A protocol for reaching a Consensus can also solve the BA problem. Hence, this paper focuses on the Consensus problem.
The Consensus problem in wired networks has been extensively studied over the past two decades. Many graceful Consensus protocols have been proposed with various network structure assumptions and different symptoms of faulty components assump-tions. Examples are Consensus protocols for fully connected network with malicious faulty processors [17], broadcast network with malicious faulty processors and malicious faulty communication links [1] and un-fully connected network with hybrid (dormant and malicious) faulty processors [8, 14]. The detailed description of the symptoms of faulty components is presented in section 2.1.
Since wireless networks and mobile computing are becoming ubiquitous, the future network environments will consist of both wired and wireless networks and provide sup-port for mobile computing. We know that the physical topology of a wired network is static, but the physical topology of a wireless network is dynamic. Hence, previous Con-sensus protocols are not applicable in a combined wired/wireless network.
Communication overhead in the Consensus protocol is another issue that we must not ignore. Due to the large communication overhead, it is difficult, or even impossible, to realize the Consensus protocol [7]. In this paper, we introduce a hierarchical concept in our system model to reduce communication overhead in the Consensus protocol.
In addition, mobile processors exhibit some specific aspects that must be addressed so as to design an efficient system. A crucial issue in the design and development of mo-bile processors is power consumption, as batteries have great influence on the weight, size and reliability of mobile processors [13]. That is why the bandwidth and computa-tion ability of mobile processors are often weaker than that of stacomputa-tionary processors. We designed a transmission protocol “Secure Relay Fault-tolerance Channel” (SRFC), which is more efficient in increasing battery lifetime and provides secure communications be-tween processors. SRFC is also applicable for stationary processors.
This paper is intended to investigate the Consensus problem in combined wired/ wireless network. Two protocols are proposed. The first is the transmission protocol SRFC. The second is the Consensus protocol “Client-initiated Consensus Protocol” (CCP). This paper is organized as follows. Section 2 provides the conditions for Consensus. Section 3 introduces concept and approaches. Section 4 dissects the correctness and complexity of proposed protocols. Finally, conclusions are induced in section 5.
2. THE CONDITIONS FOR CONSENSUS
To design a Consensus protocol, certain conditions must be taken into account. They are symptoms of faulty components, the system model, properties of the Consensus problem and the constraint of allowable faulty consensus-servers.
2.1 The Symptoms of Faulty Components
The symptoms of a faulty component (processor [11] or communication link [12, 17]) include crash, omission and Byzantine. (1) Crash failure: a faulty component stops executing prematurely and does nothing afterward. (2) Omission failure: a faulty com-ponent omits to send or receive messages. (3) Byzantine failure: a faulty comcom-ponent can exhibit any behavior whatsoever [4, 9, 11]. (e.g., suffer benign failures, send bogus val-ues in messages, send messages at the wrong time, send different messages to different processors and work in coordination with other faulty processors to prevent fault-free processors from reaching a common value). We may divide the above faulty component symptoms into two categories. They are dormant fault (crash failure and omission failure) and malicious fault (Byzantine failure) [8].
2.2 The System Model
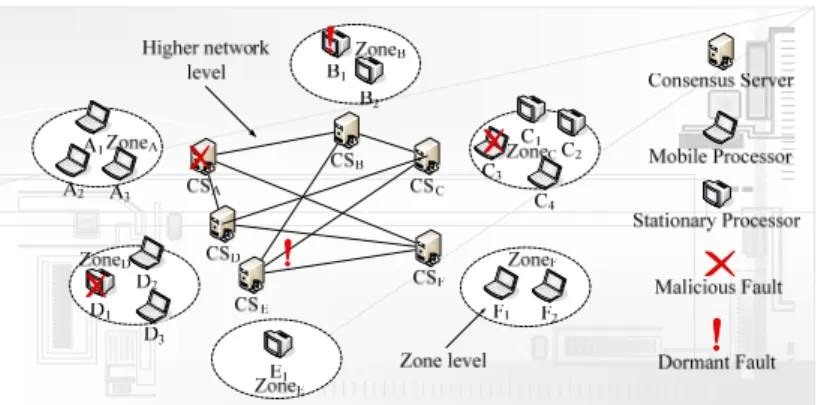
In recent years, the bandwidth and quality of wireless networks has been drastically improved. Therefore, wireless network has become more and more popular [3], resulting in the development of nowadays network from wired or wireless network to combined wired/wireless network. We know that the communication overhead of the Consensus protocol is inherently large [7]. Previous Consensus protocols were designed for flat net- works [8, 14, 17]. In a flat network, all processors undertake equal responsibility and all messages must propagate globally throughout the network. This makes the previous Consensus protocols inefficient. In this study, we use a hierarchical concept to reduce the communication overhead. Fig. 1 shows an example of the two-level combined wired/ wireless network. There are six consensus-servers, six stationary processors and nine mobile processors. The network is divided into six zones by six consensus-servers. Each consensus-server manages a zone’s processors. For example, consensus-server CSA
man-ages processor A1, A2 and A3 in the zone A. The parameters and assumptions of our
sys-tem model are listed as follows:
• The underlying network is un-fully connected.
Fig. 1. Two-level combined wired/wireless network.
• The two levels include a higher network level and a zone level.
• The combined wired/wireless network consists of wired backbones and wireless cells that provide access to mobile processors.
• Processors include consensus-server, mobile processor and stationary processor. • Clients include stationary processor and mobile processor.
• Consensus-server is a powerful and reliable computer with high bandwidth. • Mobile processor is a processor with mobility.
• Stationary processor is a processor without mobility.
• Let N be the set of all processors in the network and |N| = n, where n is the number of processors in the underlying network.
• Let ZN be the set of all consensus-servers in the network and |ZN| = zn, where zn is the
number of consensus-servers in the underlying network and zn ≥ 4.
• The underlying network is unreliable: messages may be dropped, reordered, inserted or duplicated by faulty components.
• Each processor in the network can be uniquely identified.
• Let pm be the maximum number of malicious faulty processors allowed.
• Let pd be the maximum number of dormant faulty processors allowed.
• Let zm be the maximum number of malicious faulty consensus-servers allowed, zm ≤
⎣(zn − 1)/3⎦.
• Let zd be the maximum number of dormant faulty consensus-servers allowed.
• Let cm be the maximum number of malicious faulty communication links allowed in
the higher network level.
• Let cd be the maximum number of dormant faulty communication links allowed in the
higher network level.
• Let c be the connectivity of each consensus-server in the higher network level, where c > cm + cd + zm + zd.
• The connectivity cp of Zonep must be larger than the number of malicious faulty
com-ponents (processors and communication links) plus the number of dormant faulty components in Zonep, where 1 ≤ p ≤ zn.
• A processor does not know the faulty status of other components in the underlying network.
2.3 Properties of the Consensus Problem
Using the hierarchical concept, each processor in the zone is managed by its con-sensus-server. Hence, two properties of the Consensus problem in two-level combined wired/wireless network are modified as follows: (1) Consensus: All fault-free processors managed by the fault-free consensus-server agree on a common value; (2) Validity: If the initial value of all consensus-server is vi, then all fault-free processors managed by the
fault-free consensus-server shall agree on vi.
2.4 The Constraint of Allowable Faulty Consensus-Servers
In the Consensus problem, the number of faulty processors allowed in the network depends on the total number of processors. Meyer and Pradhan [8] indicates the con-straint of Consensus problem with malicious faulty processors and dormant faulty proc-essors is n > 3pm + pd. Afterward, Siu et al. [14] finds that the correct constraint should
be n > ⎣(n − 1)/3⎦ + 2pm + pd. The network architectures of Meyer and Pradhan [8] and
Siu et al. [14] are flat. All processors need to exchange the messages in the Message Exchanging Phase. In our Consensus protocol, the network architecture is hierarchical, and only the consensus-server needs to exchange the messages in the Message Exchang-ing Phase. Hence, the constraint of our model is zn > ⎣(zn − 1)/3⎦ + 2zm + zd.
3. CONCEPT AND APPROACHES
In this section, Consensus protocol CCP is introduced. In CCP, transmission proto-col SRFC is used to transmit messages, so we introduce the transmission protoproto-col at first.
3.1 Secure Communication Channel
A close study of cryptographic technologies is not necessary for our purpose. Hence, we give a brief introduction of some cryptographic technologies that are used in the pro-posed protocols. Then, we introduce the propro-posed protocol SRFC.
3.1.1 Related cryptographic technologies
The brief introduction of Diffie-Hellman key exchange, advanced encryption stan-dard and threshold signature are shown here. Diffie-Hellman key exchange [6] is a cryp-tographic protocol that allows two processors to agree on a secret key over an insecure communication channel.
In a symmetric cryptographic system, the communication parties share a key in ad-vance. They encrypt and decrypt delivered messages by the shared key. The security is based on the shared key. If adversaries reveal the shared key, the symmetric crypto-graphic system will crash. Advanced Encryption Standard (AES) also known as Rijndael [5] is a block cipher adopted as an encryption standard by the US government and ex-pected to be used worldwide.
value h is set (h ≤ k). If more than h shares have been collected, we can reconstruct the original secret s. The threshold signature is based on the following equation: f(x) = ah-1xh-1
+ ah-2xh-2 + … + a1x + a0 mod p where p is a prime number.
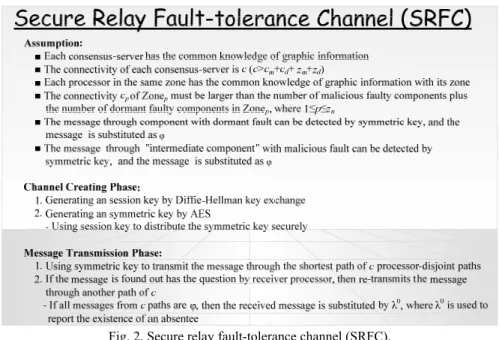
3.1.2 Transmission protocol: secure relay fault-tolerance channel (SRFC)
Energy consumption is a major performance metric for mobile processors. If the power consumption is low, the battery lifetime will be longer [13]. In this section, a transmission protocol “Secure Relay Fault-tolerance Channel” (SRFC) is proposed. SRFC can remove the influence from the faulty intermediate component and reduces power consumption to provide a secure communication channel between sender and receiver. The transmission protocol SRFC is shown in Fig. 2.
Fig. 2. Secure relay fault-tolerance channel (SRFC).
3.1.3 The connectivity constraint
In Meyer and Pradhan [8], the fallible components are dormant/malicious faulty processors. Meyer and Pradhan [8] used a time-out mechanism to detect a dormant faulty processor. However, the time-out mechanism cannot detect a malicious faulty intermedi-ate component. To avoid the majority value from being dominintermedi-ated by malicious faulty intermediate components, the connectivity constraint in the network by Meyer and Prad-han [8] is c′ (c′ > 2pm + pd, where pm is the maximum number of malicious faulty
proc-essors allowed and pd is the maximum number of dormant faulty processors allowed). In
Siu, Chin and Yang [15], the fallible components are dormant/malicious faulty processors and dormant/malicious faulty communication links. Siu, Chin and Yang [15] also used a time-out mechanism to detect a dormant faulty component. Thus, the connectivity con-straint in the network by Siu, Chin and Yang [15] is c″ (c″ > 2pm + pd + 2(lm + ld), where
pm is the maximum number of malicious faulty processors allowed, pd is the maximum
number of dormant faulty processors allowed, lm is the maximum number of malicious
faulty communication links allowed and ld is the maximum number of dormant faulty
communication links allowed). In SRFC, the network connectivity constraint is improved. For the higher network level, the connectivity of each consensus-server is c (c > cm + cd +
zm + zd where cm is the maximum number of malicious faulty communication link allowed,
cd is the maximum number of dormant faulty communication links allowed, zm is the
maximum number of malicious faulty consensus-servers allowed and zd is the maximum
number of dormant faulty consensus-servers allowed). For the zone level, the connec-tivity cp of Zonep must be larger than the number of malicious faulty components
(proc-essors and communication links) plus the number of dormant faulty components in Zonep,
where 1 ≤ p ≤ zn. Because a symmetric key is used, the receiver processor can detect a
message that is influenced by dormant and malicious faulty intermediate components.
3.1.4 Four cases of fault handling
We classify the fault (or attack) that may take place in a transmission process into four cases: (Case 1) Sender with dormant fault or intermediate component with dormant fault, (Case 2) Intermediate component with malicious fault, (Case 3) Sender with mali-cious fault, and (Case 4) Receiver with dormant fault or receiver with malimali-cious fault.
Our protocol SRFC can deal with Cases 1 and 2. For Case 1, a message sent through a dormant faulty component cannot be reconstructed by the symmetric key. In Case 2, we can detect that the message is false using the symmetric key. In Case 3, our SRFC cannot detect if the message is correct or not. Because the sender has the symmetric key, the sender has control over the message. Case 3 can be solved using our Consensus protocol CCP. The detailed description of CCP is presented in section 3.2. For Case 4, because the receiver is a faulty component, we do not care the message received from the faulty receiver.
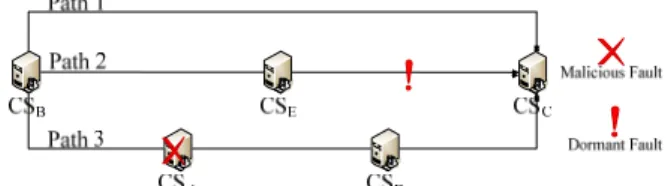
If the network connectivity is c, we can determine c processor-disjoint paths between the sender and receiver. These c processor-disjoint paths can be predefined [16]. An example of c (c = 3) processor-disjoint path between CSB and CSC is shown in Fig. 3. In
Path 2 there is a dormant faulty communication link between CSE and CSC. Hence, the
message is influenced by the dormant faulty component (Case 1). CSC can detect this
problem using the symmetric key. In Path 3 there is a malicious faulty component CSA
(Case 2), CSC also can detect this problem using the symmetric key. In Path 1, there is no
faulty intermediate component between CSB and CSC, CSC can receive the message from
CSB without faulty influence. That is, if c > cm + cd + zm + zd (3 > 0 + 1 + 1 + 0, 3 > 2),
we can ensure that the receiver can receive the message without influence from faulty intermediate component.
To reduce power consumption, each sender only transmits one copy of the message through the shortest path of c paths. If the receiver detects that the message is false, it then re-transmits the message through another path in c processor-disjoint paths. If all messages from c paths are φ, then the received message is substituted by λ0. λ0 is used to
report the existence of an absentee. That is, SRFC can remove the influence from dor- mant/malicious faulty intermediate components and the influence from dormant faulty sender. SRFC is an efficient transmission protocol which reduces the computation time and power consumption to provide a secure communication channel.
Fig. 3. The c disjoint paths between CSB and CSC, where c = 3.
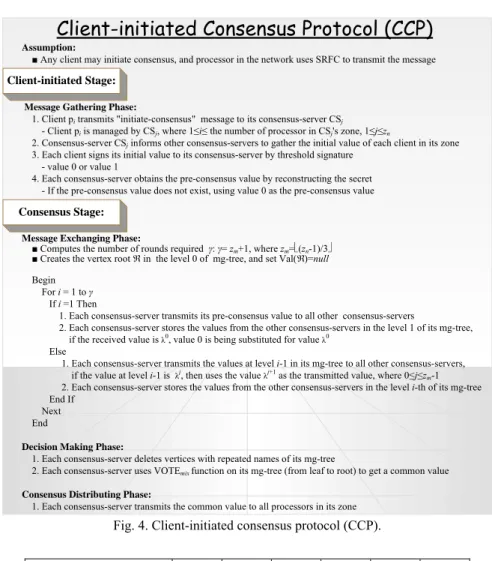
3.2 Consensus Protocol: Client-Initiated Consensus Protocol (CCP)
In this section, we would like to focus our attention on the proposed Consensus pro-tocol “Client-initiated Consensus Propro-tocol” (CCP). To meet the characteristics of Con-sensus problem in combined wired/wireless networks, most of the communications and computation overhead must be fulfilled within by the consensus-servers. Therefore, only consensus-servers need to exchange messages and compute the common value in CCP. Furthermore, all messages in CCP are transmitted by SRFC. There are two stages in CCP, namely the Client-initiated Stage and the Consensus Stage. The Consensus protocol CCP is shown in Fig. 4.
In this section, we also give an example of executing SRFC and CCP. An example of two-level combined network used in this section is shown in Fig. 1. The dormant faulty components are B1 and LCE. The malicious faulty components are CSA, D1 and C3.
3.2.1 Client-initiated stage
The purpose of the Client-initiated Stage is to collect the initial value from each cli-ent and compute the pre-consensus value for each consensus-server. Any clicli-ent may ini-tiate Consensus in the network. For example, B2 wants to initiate a Consensus. Hence, B2
creates a secure communication channel between CSB by SRFC. B2 then transmits the
“initiate-consensus” message to CSB through processor-disjoint path created by SRFC.
After CSB receives the “initiate-consensus” message, CSB creates secure communication
channels to all other consensus-servers by SRFC and then informs all consensus-servers to gather the initial value from each client in its zone. The initial value of each client is shown as follows.
Client ID: A1 A2 A3 B1 B2 C1 C2 C3 C4 D1 D2 D3 E1 F1 F2
Initial value: 0 1 0 λ0 1 1 1 1 1 1 0 1 0 0 0
Each consensus-server then obtains the pre-consensus value using the threshold sig-nature. For example, there are two processors in ZoneB, one is B1 which is a dormant
faulty processor, and another is B2 which is a fault-free processor. Hence, CSB can detect
that the message from B1 is influenced by a dormant faulty component. After B1 and B2
sign its initial value to CSB, CSB can obtain the pre-consensus value 1 (the number of
value 1 is greater than or equal to half of the number of processor in ZoneB, λ0 is ignore).
Client-initiated Consensus Protocol (CCP)
Assumption:
■ Any client may initiate consensus, and processor in the network uses SRFC to transmit the message
Message Gathering Phase:
1. Client pi transmits "initiate-consensus" message to its consensus-server CSj - Client pi is managed by CSj, where 1≤i≤ the number of processor in CSj's zone, 1≤j≤zn
2. Consensus-server CSj informs other consensus-servers to gather the initial value of each client in its zone 3. Each client signs its initial value to its consensus-server by threshold signature
- value 0 or value 1
4. Each consensus-server obtains the pre-consensus value by reconstructing the secret - If the pre-consensus value does not exist, using value 0 as the pre-consensus value
Message Exchanging Phase:
■ Computes the number of rounds required γ: γ= zm+1, where zm= (zn-1)/3 ■ Creates the vertex root in the level 0 of mg-tree, and set Val( )=null Begin
For i = 1 to γ If i =1 Then
1. Each consensus-server transmits its pre-consensus value to all other consensus-servers
2. Each consensus-server stores the values from the other consensus-servers in the level 1 of its mg-tree, if the received value is λ0, value 0 is being substituted for value λ0
Else
1. Each consensus-server transmits the values at level i-1 in its mg-tree to all other consensus-servers, if the value at level i-1 is λj, then uses the value λj+1as the transmitted value, where 0≤j≤zm-1 2. Each consensus-server stores the values from the other consensus-servers in the level i-th of its mg-tree End If
Next End
Decision Making Phase:
1. Each consensus-server deletes vertices with repeated names of its mg-tree
2. Each consensus-server uses VOTEmix function on its mg-tree (from leaf to root) to get a common value
Consensus Distributing Phase:
1. Each consensus-server transmits the common value to all processors in its zone
Client-initiated Stage:
Consensus Stage:
Fig. 4. Client-initiated consensus protocol (CCP).
Consensus-Server ID: CSA CSB CSC CSD CSE CSF
Pre-consensus value: 0 1 1 1 0 0
3.2.2 Consensus stage
The purpose of the Consensus Stage is to compute a common value. There are three phases in the Consensus stage; including the Message Exchanging Phase, the Decision Making Phase and the Consensus Distributing Phase.
In the Message Exchanging Phase, we first compute the number of rounds required γ. The number of rounds required for the network model in Fig. 1. is γ = 2 (γ = ⎣(6 − 1)/3⎦ + 1). Then, we creates the vertex ℜ in the level 0 of its mg-tree, and set Val(ℜ) =
null. The mg-tree is a tree structure that is used to store received messages (the detailed
description of the mg-tree is presented in Appendix). In the first round of the Message Exchanging Phase, each consensus-server transmits its pre-consensus value to all other consensus-servers by SRFC. Each consensus-server then stores the values from other
consensus-servers in the level 1 of its mg-tree. Since CSA is a malicious faulty processor,
CSA may transmit different messages to different consensus-server to prevent the fault-
free consensus-server from reaching a common value. The messages transmitted by CSA
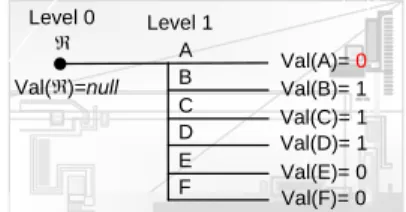
in the first round of Message Exchanging Phase are shown in Fig. 5. An mg-tree of CSB
after the first round of Message Exchanging Phase is shown in Fig. 6.
A Level 1 B C D E F Val(A)=0 Val(B)= 1 Val(F)= 0 Val(E)= 0 Val(C)= 1 Val(D)= 1 Level 0 Val( )=null
Fig. 5. CSA transmits different message Fig. 6. A one-level mg-tree of CSB. to different consensus-server.
In the second round of the Message Exchanging Phase, each consensus-server transmits the value at level 1 in its mg-tree to all other consensus-servers, and stores the value from other consensus-servers in the level 2 of its mg-tree. An mg-tree of CSB after
the second round of the Message Exchanging Phase is shown in Fig. 7.
Fig. 7. An mg-tree of CSB after the second round Fig. 8. An mg-tree of CSB without repeated of the message exchanging phase. name vertices.
3.2.3 Decision making phase
In the Decision Making Phase, each consensus-server deletes vertices with repeated names of mg-tree to avoid the repeated influence from faulty consensus-servers. An mg- tree of CSB without repeated name vertices is shown in Fig. 8. Each consensus-server
then uses the VOTEmix function on its mg-tree (from leaf to root) to compute the
com-mon value. The VOTEmix function is shown in Fig. 9. Conditions 1, 4 and 5 are similar to
convention majority vote [11]. Condition 2 is used to deal with the dual failure mode (where both dormant fault and malicious fault exist). Condition 3 is used to describe the existence of an absentee. For example, CSB can obtain the common value φ by VOTEmix.
VOTEmix(ℜ) = ((0, 0, 1, 1, 0), (0, 1, 1, 1, 1), (0, 1, 1, 1, 1), (1, 1, 1, 1, 1), (1, 0, 0, 0, 0),
(0, 0, 0, 0, 0)) = (0, 1, 1, 1, 0, 0) = φ.
Fig. 9. The votemix function.
3.2.4 Consensus distributing phase
Each consensus-server transmits the common value to all processors in its zone. All fault-free processors (both stationary processors and mobile processors), which are man-aged by the fault-free consensus-server, can obtain a common value. The value agreed upon by a processor, which is managed by faulty consensus-server, is ignored [11].
4. CORRECTNESS AND COMPLEXITY
The goal of CCP is to enable all fault-free consensus-server to reach a common value to solve the Consensus problem in a combined wired/wireless network. To prove the correctness of our protocol CCP, a vertex ℜ is called common [2] if each fault-free consensus-server has the same value for ℜ. That is, if vertex ℜ is common, then the value stored in vertex ℜ of each fault-free consensus-server’s mg-tree is identical.
Lemma 1 All correct vertices of an mg-tree are common after function VOTEmix is
ap-plied to mg-tree.
Proof: In the Decision Making Phase, all vertices with repeated names are deleted in an
mg-tree. At level zm + 1 or above, the correct vertex α has at least 2zm + 1 children, and
out of which at least zm + 1 children are correct. The true values of these zm + 1 correct
vertices are common, and the majority of the vertex value α is common. The correct ver-tex α is common in the mg-tree if the level of α is less then zm + 1. Consequently, all
correct vertices of the mg-tree are common.
Lemma 2 The common frontier exists in the mg-tree.
Proof: By definition, an mg-tree is a tree of level zm + 1. There are zm + 1 vertices along
each root-to-leaf path of an mg-tree. Since at most zm consensus-servers can fail, there is
at least one correct vertex along each root-to-leaf path of the mg-tree. Using Lemma 1, the correct vertex is common and the common frontier exists in each fault-free consen-sus-server’s mg-tree.
Lemma 3 Let α be a vertex, α is common if there is a common frontier in the sub-tree
rooted at α.
Proof: If the height of α is 0 and the common frontier (α itself) exists, α is common. If
the height of α is γ, the children of α are all in common under the induction hypothesis with the height of the children being γ − 1.
Corollary 1 The value of root ℜ is common if the common frontier exists in the mg-
tree.
Theorem 1 The value of root ℜ of a fault-free consensus-server’s mg-tree is common.
Proof: Using Lemmas 1, 2, 3 and Corollary 1, the theorem is proved.
Theorem 2 Protocol CCP solves the Consensus problem in a two-level combined wir-
ed/wireless network.
Proof: To prove this theorem, CCP must meet the constraints (Consensus’) and
(Valid-ity’).
(Consensus’): Root value is common. By Theorem 1, (Consensus’) is satisfied.
(Validity’): VOTE (α) = v for all fault-free consensus-servers, if the initial value of all
consensus-server is vs say v = vs.
Most consensus-servers are fault-free. The value of the correct vertices for all of the fault-free consensus-servers’ mg-trees is v. Therefore, each correct vertex of the mg-tree is common (Lemma 1), and its true value is v. Using Theorem 1, this root is common. The computed value VOTE (α) = v is stored in the root for all the fault-free consensus- server. Therefore, (Validity’) is satisfied.
Theorem 3 CCP requires zm + 1 rounds in the Message Exchanging Phase to solve the
Consensus problem in a two-level combined wired/wireless network, and zm + 1 (zm =
⎣(zn − 1)/3)⎦) is the minimum number of rounds in the “Message Exchanging Phase”. Proof: In the Consensus protocol, we use term “round” to compute the number of
mes-sages exchanged. A round is defined as follows: (1) sending mesmes-sages to any set of nodes, (2) receiving messages, and (3) processing the messages locally [7, 11]. The “Message Exchanging Phase” is a time consuming phase. Fischer and Lynch [7] indicated that t + 1 (t = ⎣(n − 1)/3⎦) rounds are the minimum number of rounds required to get enough mes-sages to achieve Consensus. The network architecture of Fischer and Lynch [7] is a flat architecture, but the network architecture of our system is two-level architecture. In our protocol, only consensus-servers need to exchange the messages in the Message Ex-changing Phase, so the number of required rounds of message-exchange is zm + 1 (zm =
⎣(zn − 1)/3⎦). Thus, CCP requires zm + 1 rounds, and this number is the minimum.
5. CONCLUSION
Three motives are combined in this paper on the Consensus problem in combined wired/wireless network. First, most networks today are combined wired/wireless works. Extant Consensus protocols are not applicable to combined wired/wireless net-works. Hence, we proposed the protocol CCP to solve the Consensus problem in com-bined wired/wireless network. Second, the limited resources have made the computation ability of mobile processors often weaker than that of stationary processors. The pro-posed SRFC provides an efficient and secure communication channel. Third, the com-munication overhead of the Consensus protocol is inherently large. We used the hierar-chical concept in CCP to reduce the large amount of communication overheads. There-fore, CCP is more efficient than the previous protocols when the network is logically divided into hierarchical architecture. Table 1 shows some instances of the number of rounds required for flat network and two-level network. Smaller number of zone is pre-ferred since the number of rounds required in the Message Exchanging Phase is smaller.
In this paper, we solved the Consensus problem with dual failure modes (dormant/ malicious faulty components) in the combined wired/wireless network. CCP requires only
zm + 1 rounds (minimum number of rounds) in the Message Exchanging Phase which is
optimal for all fault-free processors managed by fault-free consensus-servers to reach a common value.
Table 1. Some instances of the number of rounds required for various consensus protocols. The number of rounds required in message exchanging phase
n = 128, zn = 32 n = 128, zn = 16 n = 128, zn = 8
Flat Network t = ⎣(n − 1)/3⎦t + 1, 43 43 43
Two-Level Network zm + 1,
zm = ⎣( zn − 1)/3⎦ 11 6 3
n: the number of processors in the underlying network and n ≥ 4.
APPENDIX
The message gathering tree (mg-tree)
In the beginning Consensus Stage, each consensus-server creates the vertex ℜ in the level 0 of its mg-tree, and set Val (ℜ) = null. At the first round of Message Exchanging Phase, each consensus-server transmits its initial value to the other consensus-servers. We assume that each receiver can always identify the sender of a message. For example, when CSB receives the initial value sent from CSA, CSB stores the received value,
de-noted as val (A), in vertex A of its mg-tree as shown in Fig. 6. Similarly, when CSB
re-ceives the initial value sent from CSC, CSB stores the received value, denoted as val (C),
in vertex C of its mg-tree as shown in Fig. 6.
At the second round of Message Exchanging Phase, each consensus-server trans-mits the values in level 1 of its mg-tree to the other consensus-servers. If CSA sends
message val (B) to CSB, then CSB stores the received messages from CSA, denoted as val
(BA), in vertex BA of its mg-tree as shown in Fig. 7.
Generally speaking, message val (ab…n), stored in the vertex ab…n of an mg-tree, implies that the message just received was sent through the CSa, CSb, …, CSn, where CSn
is the latest consensus-server to pass the message. When a message is transmitted through a consensus-server more than once, the name of the consensus-server will be repeated cor-respondingly. For instance, the appearance of message val (AA) in vertex AA in Fig. 8 indicates that the message is sent from CSA to CSA again; therefore, CSA appears twice in
vertex name AA.
REFERENCES
1. O. Babaoglu and R. Drummond, “Streets of Byzantium: Network architectures for fast reliable broadcasts,” IEEE Transactions on Software Engineering, Vol. 11, 1985, pp. 546-554.
2. A. Bar-Noy, D. Dolev, C. Dwork, and R. Strong, “Shifting gears: Changing algo-rithms on the fly to expedite Byzantine agreement,” Information and Computation, Vol. 97, 1992, pp. 205-233.
3. T. Camp, J. Boleng, and V. Davies, “A survey of mobility models for ad hoc net-work research,” Wireless Communications and Mobile Computing, Vol. 2, 2002, pp. 483-502.
4. G. D. Crescenzo, R. Ge, and G. R. Arce “Securing reliable server pooling in MAN- ET against Byzantine adversaries,” IEEE Journal on Selected Areas in
Communica-tions, Vol. 24, 2006, pp. 357-369.
5. J. Daemen and V. Rijmen, “The rijndael block cipher,” AES Document Version 2. 6. W. Diffie and M. E. Hellman, “New directions in cryptography,” IEEE Transactions
on Information Theory, Vol. 22, 1976, pp. 644-654.
7. M. Fischer and N. Lynch, “A lower bound for the assure interactive consistency,”
Information Processing Letters, Vol. 14, 1982, pp. 183-186.
8. F. J. Meyer and D. K. Pradhan, “Consensus with dual failure modes,” IEEE
Trans-actions on Parallel and Distributed Systems, Vol. 2, 1991, pp. 214-222.
Byzan-tine sensors,” in Proceedings of IEEE Asilomar Conference on Signals, Systems, and
Computers, 2006, pp. 281-284.
10. M. Okum, “Agreement among unacquainted Byzantine generals,” Lecture Notes in
Computer Science, Vol. 3724, 2005, pp. 499-500.
11. M. Pease, R. Shostak, and L. Lamport, “Reaching agreement in the presence of faults,” Journal of ACM, Vol. 27, 1980, pp. 228-234.
12. G. Rabbat, D. Nowak, and A. Bucklew, “Generalized consensus computation in net- worked systems with erasure links,” in Proceedings of the 6th IEEE Workshop on
Signal Processing Advances in Wireless Communications, 2005, pp. 1088-1092.
13. T. Simunic, “Power saving techniques for wireless LANs,” in Proceedings of the
Conference on Design, Automation and Test in Europe, Vol. 3, 2005, pp. 96-97.
14. H. S. Siu, Y. H. Chin, and W. P. Yang, “A note on consensus on dual failure modes,”
IEEE Transactions on Parallel and Distributed System, Vol. 7, 1996, pp. 225-230.
15. H. S. Siu, Y. H. Chin, and W. P. Yang, “Byzantine agreement in the presence of mixed faults on processors and links,” IEEE Transactions on Parallel and
Distrib-uted Systems, Vol. 9, 1998, pp. 980-986.
16. D. B. West, Introduction to Graph Theory, 2nd ed., Prentice Hall, New Jersey, 2001. 17. K. Q. Yan, Y. H. Chin, and S. C. Wang, “Optimal agreement protocol in malicious faulty processors and faulty links,” IEEE Transactions on Knowledge and Data
En-gineering, Vol. 4, 1992, pp. 266-280.
Chien-Fu Cheng (鄭建富) received the Ph.D. in Computer Science from National Chiao Tung University, Taiwan. His current research interests include distributed data processing, fault tolerant computing, and mobile computing.
Shu-Ching Wang (王淑卿) received the B.S. in Computer Science from Feng Chia University, the M.S. in Electrical Engineering from National Cheng Kung University, and Ph.D. in Information Engineering from National Chiao Tung University, Taiwan. Currently, she is a Professor with the Graduate Institute of Informatics, Chaoyang Uni-versity of Technology, Taichung County, Taiwan. Her current research interests include grid computing, distributed data processing, parallel processing, and algorithm analysis and design.
Tyne Liang (梁婷) received her Ph.D. in Computer Science and Information Engi-neering from National Chiao Tung University, Taiwan. Currently, she is an Associate Professor with Department of Computer Science, National Chiao Tung University. Her research interests include information retrieval, natural language processing and inter-connection network.