行政院國家科學委員會專題研究計畫 成果報告
併網型分散式電源數位保護電驛之研製 研究成果報告(完整版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 98-2623-E-011-003-ET
執 行 期 間 : 98 年 01 月 01 日至 98 年 12 月 31 日 執 行 單 位 : 國立臺灣科技大學電機工程系
計 畫 主 持 人 : 辜志承 共 同 主 持 人 : 楊明達
計畫參與人員: 碩士班研究生-兼任助理人員:楊志哲 碩士班研究生-兼任助理人員:吳孟穎 碩士班研究生-兼任助理人員:吳瑋晨
處 理 方 式 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢
中 華 民 國 99 年 03 月 22 日
行政院國家科學委員會/經濟部能源局
「能源科技學術合作研究計畫」成果報告
併網型分散式電源數位保護電驛之研製
計畫類別:█ 個別型計畫 □ 整合型計畫 計畫編號:NSC 98-2623-E-011-003-ET
執行期間:98 年 01 月 01 日至 98 年 12 月 31 日 計畫主持人:辜志承
計畫參與人員:楊志哲、吳孟穎
成果報告類型(依經費核定清單規定繳交):□ 精簡報告
█ 完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究 計畫、列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,
□一年□二年後可公開查詢 執行單位:國立台灣科技大學電機工程所
中 華 民 國 99 年 02 月 20 日
I
摘要
本計畫主要以數位訊號處理器 DSP 製作一併網型分散式電源數 位保護電驛裝置,軟體方面包含各硬體間的相互聯絡、參數偵測法與 相關演算法,如過/欠電壓、過電流、過/欠頻率、頻率變化率與相位 跳躍等,並使用 CCS 軟體對各併網控制與併網保護演算法進行模擬,
確保時序與功能之正確性。硬體方面則包含控制、數位訊號控制器、
量測、數位輸入/輸出、電源、人機介面與背板等 7 大模組。本計畫也 參照 IEEE Std.1547.1 與台電再生能源發電系統併聯技術要點,以 Matlab/Simulink 建立併網模式與微電網模式測試電路,依據併網測試 步驟及方法取得斷路器兩端電壓與電流的波形,再將模擬波形依序送 進波形重現器,而波形重現器會將輸入資料轉換為裝置設備可接受的 數位訊號,最後,對併網裝置的性能加以測試,完成併網型分散式電 源數位保護電驛之製作。
關鍵字:微電網、併網控制、併網保護演算法、DSP。
II
Abstract
The development of digital protection relay for grid-connected distributed power supply is presented in this project. This study covers the interaction through hardware, the parameter detection, and relevant algorithms to design device such as over/under voltage, over current, over/under frequency, rate of change of frequency, and vector jump.
Therefore in this project uses CCS to simulate the action of the interconnected control and protection device algorithms that ensures the accuracy of the timing and function. In hardware, the development consists of Control, DSC, Measure, D-IO, Power, Keyboard & Display Module, and Backplane. This project also follows the latest standard to simulate the testing circuit under interconnected and islanding mode operation by using Matlab/Simulink. According to the testing steps, we can get waveforms of voltage and current of breakers on both sides, and then send waveforms to the Doble device in order. Afterward the device will transform input data into digital signal that DSP-based device can accept. Finally, we verify the performance of the device and accomplish the development of DSP-based device.
Keywords: Microgrid, Interconnected Control, protection device algorithms , DSP.
III
目錄
摘要 ... I Abstract ... II 目錄 ... III 圖目錄 ... VII 表目錄 ... XII
第一章 緒論 ... 1
1.1 研究背景與動機 ... 1
1.2 文獻回顧 ... 3
1.3 研究方法 ... 6
1.4 論文架構 ... 7
第二章 微電網 ... 9
2.1 簡介 ... 9
2.2 微電網之架構 ... 9
2.3 國際相關研究之現況 ... 10
2.4 微電網之運轉偵測 ... 17
2.5 微電網之保護協調 ... 18
2.6 微電網之併網控制 ... 19
2.7 本章小結 ... 20
第三章 DSP 及 MCU 發展系統 ... 21
3.1 簡介 ... 21
3.2 DSP 數位信號處理器 ... 22
3.2.1 TI-TMS320F28335 之硬體特性 ... 22
3.2.2 TI-TMS320F28335 之軟體特性 ... 23
3.2.3 TI-TMS320F28335 之功能架構 ... 23
3.3 TI-TMS320F28335 之功能綜述 ... 24
IV
3.3.1 系統時脈控制(Clock) ... 24
3.3.2 中斷(PIE) ... 25
3.3.3 CPU 計時器(CPU Timer)... 28
3.3.4 類比數位轉換(ADC) ... 29
3.3.5 通用輸入/輸出(GPIO) ... 31
3.3.6 串列通訊介面(SCI) ... 34
3.4 MCU 微控制器 ... 36
3.4.1 Atmel-AT89S8253 之硬體特性 ... 36
3.4.2 Atmel-AT89S8253 之軟體特性 ... 38
3.4.3 Atmel-AT89S8253 之功能架構 ... 38
3.5 Atmel-AT89S8253 之功能綜述 ... 38
3.5.1 中斷... 38
3.5.2 計時/計數器 ... 41
3.5.3 輸入/輸出介面 ... 43
3.5.4 串列通訊介面 ... 43
3.5.5 I2C 匯流排介面 ... 47
3.6 單晶片燒錄器 ... 48
3.7 本章小結 ... 49
第四章 併網型分散式電源數位保護電驛之建構 ... 51
4.1 簡介 ... 51
4.2 保護電驛裝置之基本架構 ... 51
4.2.1 硬體架構 ... 51
4.2.2 軟體架構 ... 53
4.3 偵測參數之演算法建立... 58
4.3.1 訊號之取樣 ... 58
4.3.2 頻率之計算 ... 60
4.3.3 傅立葉濾波演算法 ... 64
4.4 相關電驛之建構及測試... 67
4.4.1 過/欠電壓電驛 ... 67
V
4.4.2 過電流電驛 ... 71
4.4.3 過/欠頻率電驛 ... 74
4.4.4 頻率變化率電驛 ... 76
4.4.5 相位跳躍電驛 ... 79
4.5 併網控制之設計 ... 82
4.5.1 倂網控制之建構 ... 82
4.5.2 倂網控制之測試 ... 83
4.6 本章小結 ... 85
第五章 併網型分散式電源數位保護電驛之硬體模組設計 ... 86
5.1 簡介 ... 86
5.2 電源模組之設計 ... 87
5.3 數位信號控制器模組之設計 ... 90
5.4 控制模組之設計 ... 93
5.5 量測模組之設計 ... 97
5.6 人機介面模組之設計 ... 101
5.7 數位輸入/輸出模組之設計 ... 103
5.8 背板模組之設計 ... 105
5.9 本章小結 ... 106
第六章 併網型分散式電源數位保護電驛之測試及分析 ... 107
6.1 簡介 ... 107
6.2 應用 Matlab/Simulink 於範例系統之建立 ... 107
6.3 波形重現模擬器之應用... 112
6.4 環境模擬平台之架設 ... 112
6.5 測試方法及步驟 ... 113
6.6 環境模擬平台下之測試及分析 ... 116
6.6.1 微電網倂網控制 ... 116
6.6.1.1 倂網模式 ... 116
6.6.1.2 微電網模式 ... 120
6.6.2 微電網倂網保護 ... 124
VI
6.6.2.1 系統側故障 ... 124
6.6.2.2 微電網側故障 ... 126
6.7 本章小結 ... 130
第七章 結論與未來研究方向 ... 131
7.1 結論 ... 131
7.2 未來研究方向 ... 132
參考文獻 ... 134
附錄A 模擬電路圖 ... 138
附錄B 模擬結果圖 ... 146
VII
圖目錄
圖 2-1 CERTS 所提出之微電網架構圖 ... 10
圖 3-1 數位控制板 F28335 ... 22
圖 3-2 TI-TMS320F28335 功能架構圖 ... 23
圖 3-3 周邊時脈架構圖 ... 24
圖 3-4 外部與中斷擴展架構圖 ... 25
圖 3-5 典型的中斷響應流程圖 ... 27
圖 3-6 CPU 計時器方塊圖 ... 28
圖 3-7 CPU 計時器中斷信號方塊圖 ... 29
圖 3-8 ADC 模組方塊圖 ... 30
圖 3-9 SCI 介面方塊圖 ... 35
圖 3-10 Atmel-AT89S8253 功能架構圖 ... 38
圖 3-11 中斷處理程序流程圖 ... 40
圖 3-12 計時/計數器模組 TMOD 格式 ... 41
圖 3-13 控制暫存器 TCON 格式 ... 42
圖 3-14 串列控制暫存器 SCON 格式 ... 44
圖 3-15 電源控制暫存器 PCON 格式 ... 46
圖 3-16 串列通訊程序流程圖 ... 46
圖 3-17 I2C 匯流排架構圖 ... 47
圖 3-18 I2C 匯流排起始與停止信號狀態圖 ... 47
圖 3-19 I2C 匯流排上資料的位元傳輸狀態圖 ... 48
圖 3-20 單晶片燒錄器 ... 48
圖 3-21 各模組燒錄接腳 ... 49
圖 3-22 單晶片燒錄軟體 ... 49
VIII
圖 4-1 保護電驛裝置硬體架構圖 ... 52
圖 4-2 併網型分散式電源數位保護電驛裝置 ... 52
圖 4-3 保護電驛裝置之主目錄 ... 53
圖 4-4 控制功能項子目錄 ... 54
圖 4-5 設定完成畫面 ... 54
圖 4-6 設定控制功能項程序流程圖 ... 55
圖 4-7 保護功能項子目錄 ... 55
圖 4-8 相關電驛子目錄 ... 56
圖 4-9 詢問畫面 ... 56
圖 4-10 設定保護功能項程序流程圖 ... 57
圖 4-11 量測功能項子目錄 ... 58
圖 4-12 過/欠電壓電驛之動作流程圖 ... 69
圖 4-13 過/欠電壓電驛之功能模組 ... 69
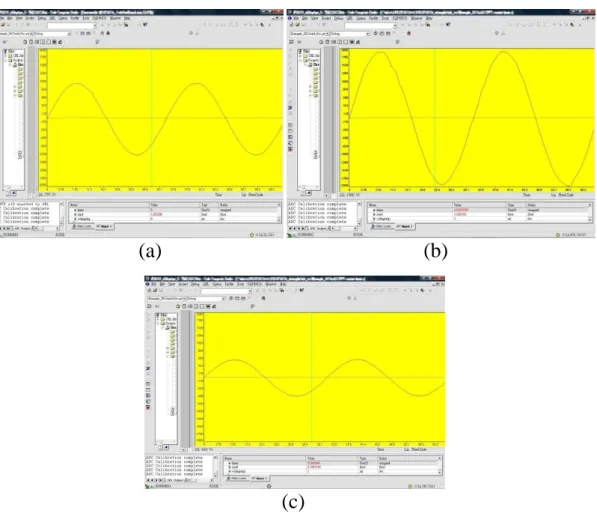
圖 4-14 過/欠電壓電驛功能之(a)電壓正常測試(b)過電壓測試(c)欠電 壓測試 ... 70
圖 4-15 過電流電驛之動作方塊圖 ... 71
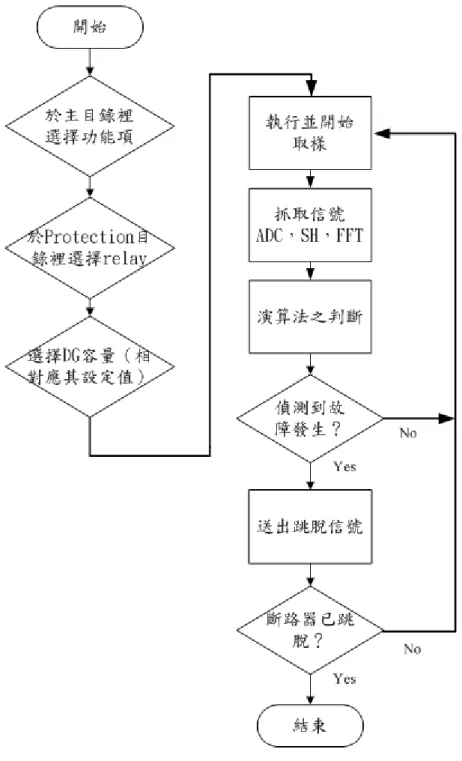
圖 4-16 過電流電驛之動作流程圖 ... 72
圖 4-17 過電流電驛之功能模組 ... 73
圖 4-18 過電流電驛功能之(a)電流正常測試(b)異常測試 ... 74
圖 4-19 過/欠頻率電驛之功能模組 ... 75
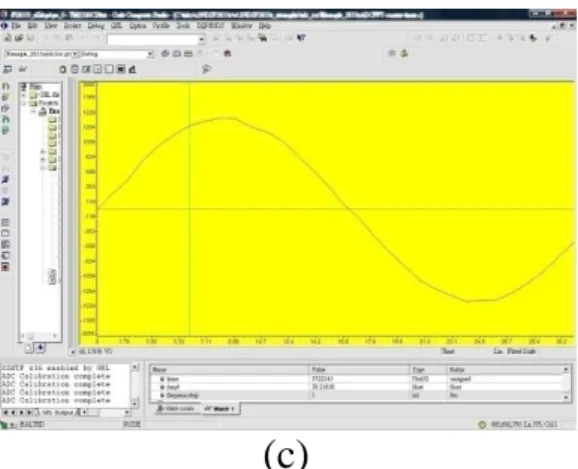
圖 4-20 過/欠頻率電驛功能之(a)頻率正常測試(b)過頻率測試(c)欠頻 率測試 ... 76
圖 4-21 ROCOF 電驛之演算時序示意圖 ... 76
圖 4-22 ROCOF 電驛之動作流程圖 ... 77
圖 4-23 ROCOF 電驛之功能模組 ... 78
IX
圖 4-24 ROCOF 電驛功能之(a)正常測試(b)異常測試 ... 79
圖 4-25 VSR 之演算法時序示意圖 ... 80
圖 4-26 VSR 電驛之動作流程圖 ... 80
圖 4-27 VSR 之功能模組 ... 81
圖 4-28 VSR 電驛功能之(a)相位正常測試(b)相位異常測試 ... 81
圖 4-29 併網控制流程圖 ... 83
圖 4-30 併網控制器之功能模組 ... 84
圖 4-31 併網控制器功能之(a)未達併網標準測試(b)達併網標準測試 . ... 84
圖 5-1 併網型分散式電源數位保護電驛裝置 ... 86
圖 5-2 裝置模組間關係示意圖 ... 87
圖 5-3 電源模組實體圖 ... 88
圖 5-4 電源模組示意圖 ... 89
圖 5-5 電源供應器規格 ... 89
圖 5-6 數位信號控制器模組實體圖 ... 90
圖 5-7 數位信號控制器模組示意圖 ... 91
圖 5-8 控制模組實體圖 ... 93
圖 5-9 控制模組示意圖 ... 94
圖 5-10 量測模組實體圖-1 ... 98
圖 5-11 量測模組示意圖-1 ... 98
圖 5-12 量測模組實體圖-2 ... 99
圖 5-13 量測模組示意圖-2 ... 99
圖 5-14 人機介面模組實體圖 ... 102
圖 5-15 人機介面模組示意圖 ... 103
圖 5-16 數位輸入/輸出模組實體圖 ... 103
X
圖 5-17 數位輸入/輸出模組示意圖 ... 104
圖 5-18 背板模組實體圖 ... 105
圖 5-19 背板模組示意圖 ... 106
圖 6-1 雙饋式風機內部方塊圖 ... 108
圖 6-2 太陽能模組方塊圖 ... 109
圖 6-3 柴油機與電壓控制方塊圖 ... 110
圖 6-4 系統正常運轉下匯流排 B11400 電壓波形 ... 111
圖 6-5 系統正常運轉下匯流排 B11400 電流波形 ... 111
圖 6-6 Doble 波形重現模擬器 ... 112
圖 6-7 環境模擬平台 ... 113
圖 6-8 範例系統測試流程圖 ... 116
圖 6-9 TransWin 軟體重現此案例後之波形(a)系統電壓(b)發電端電壓 ... 117
圖 6-10 倂網模式-太陽能發電之倂網測試結果圖 ... 118
圖 6-11 TransWin 軟體重現此案例後之波形(a)系統電壓(b)發電端電壓 ... 119
圖 6-12 倂網模式-風力發電之倂網測試結果圖 ... 120
圖 6-13 TransWin 軟體重現此案例後之波形(a)系統電壓(b)發電端電壓 ... 121
圖 6-14 微電網模式-太陽能發電之倂網測試結果圖 ... 122
圖 6-15 TransWin 軟體重現此案例後之波形(a)系統電壓(b)發電端電壓 ... 123
圖 6-16 微電網模式-太陽能發電之倂網測試結果圖 ... 123
圖 6-17 TransWin 軟體重現此案例後之波形(a)電壓(b)電流 ... 124
圖 6-18 系統側故障之保護測試結果圖(a)正常狀態(b)異常狀態 ... 125
圖 6-19 TransWin 軟體重現此案例後之波形(a)電壓(b)電流 ... 126
XI
圖 6-20 太陽能發電側故障之保護測試結果圖(a)正常狀態(b)異常狀態 ... 127 圖 6-21 TransWin 軟體重現此案例後之波形(a)電壓(b)電流 ... 128 圖 6-22 風力發電側故障之保護測試結果圖(a)正常狀態(b)異常狀態 . ... 129
XII
表目錄
表 1-1 各主動式偵測法之優缺點比較表 ... 4
表 1-2 各被動式偵測法之優缺點比較表 ... 5
表 2-1 互連系統對異常電壓之響應 ... 11
表 2-2 互聯系統對於異常頻率之保護要求 ... 12
表 2-3 最大諧波電流失真率限制規範 ... 12
表 2-4 同步互聯系統參數極限之互聯標準 ... 13
表 3-1 GPIO 暫存器說明 ... 32
表 3-2 SCI 模組訊號描述 ... 35
表 3-3 Timer 工作模式控制... 42
表 3-4 Timer 2 工作模式控制... 43
表 3-5 SCON 工作模式控制 ... 45
表 4-1 過/欠電壓電驛電驛係數表 ... 68
表 6-1 雙饋式風機參數 ... 108
表 6-2 太陽能模組相關參數 ... 109
表 6-3 範例系統測試案例說明 ... 114
1
第一章 緒論
1.1 研究背景與動機
近年來因應石油枯竭、對抗地球暖化,為維護全球人類生存環境,
聯合國於 1992 年 5 月 9 日於聯合國總部通過「聯合國氣候變化綱要公 約」(The United Nations Conference on Environment and Development, UNFCCC);氣候變化綱要公約中要求 37 個工業國應率先負起「於公 元 2000 年將 CO2 及其他溫室氣體排放量回歸本國 1990 年水平」之責 任,惟公約中各締約方並未對氣候變化之治理制定具體可行之措施,
其相關承諾亦不具約束力,在此一背景下,於 1997 年 12 月在日本京 都「氣候變化綱要公約」第三次締約國大會(COP3)中,通過「京都議 定書」(Kyoto Protocol),對於如何緩解氣候變化明訂相應措施,並賦 予公約成員中之主要工業國家具約束力的溫室氣體減量目標。
現階段應優先進行「無悔策略」的工作,例如:節約能源、提升 能源效率、推廣清潔能源使用等,以減少溫室氣體排放。京都議定書 生效後,最終將會正式討論開發中國家溫室氣體的減量責任。為減緩 溫室氣體排放量,政府已分別於民國 87 年及 94 年召開「全國能源會 議」,討論「氣候變化綱要公約發展趨勢及因應策略」等議題,以研訂 兼顧經濟發展、能源供應及環境保護之能源政策。在完成精確可靠的 估算前,暫以 2020 年 CO2 排放量降到 2000 年水準為參考值。為達此 一目標,積極推動節約能源、提升效率、鼓勵淨能、研發新能源科技、
調整產業結構等措施。其中於能源政策與能源結構調整項目中,明言 推動汽電共生及再生能源為國家政策。
2
在過去幾十年裡,電力系統已發展成為集中發電、遠距離輸電的 大型互聯網路系統,透過複雜的功率潮流等各種控制器可對其連續調 節,但近年來用電負載不斷的增加,而電網建設卻沒有同步發展,使 得遠距離輸電線路的輸送容量不斷增大,受端電網對外來電力的依賴 程度也不斷提高,使得電網運行的穩定性及安全性下降。鑒於上述問 題,許多國家如美國、日本、德國、中國等開始研究並應用多種再生 能源如煤、石油、天然氣、水力、風力、太陽能等高效經濟的新型電 力 技 術 -分 散 式 電源 DG(Distributed Generation)[1-2]或 嵌 入 式 發電 (Embedded Generation)。分散式電源一般靠近負載用戶,透過將電能 與熱能的利用相結合來提高電能的利用率;同時,由於發電位置離負 載近,還可以提高電力品質與供電可靠性。主要電網與分佈式電源相 結合被廣泛認為是提高電力系統可靠性與靈活性的主要方式,故分散 式電源技術極具發展潛力。隨之出現了分散式儲能技術,透過如超導 線圈、儲能電容器、飛輪等裝置來儲存分散式電源多餘的電能。儘管 分散式電源優點突出,但存在許多問題,如成本高、控制困難等。為 協調分散式電源與主要電網間的種種問題及分散式電源為電網和用戶 所帶來的價值效益,逐步將上述的發展技術加以整合,而有了微電網 (Microgrid)[3-5]此特殊電網形式的概念產生。
國內目前對於微電網之研究尚在起步階段,其研究僅限於太陽能 發電與風能之小型微電網電壓與頻率控制之研究,缺乏自動同步與系 統保護之探討[6]。為因應 21 世紀電力系統的革新與發展,以及再生 能源的蓬勃發展,微電網的控制與運轉、保護協調、穩定度及系統最 佳化等研究議題,需要積極投入研究俾便與世界各先進國家的技術並 駕齊驅。
3
1.2 文獻回顧
當分散式電源併入微電網之配電系統後,系統結構不再只是傳統 典型之配電系統,其會衍生出運轉與保護上的問題,其中孤島運轉即 屬其中之一,孤島運轉係指當市電系統供電因事故中斷時,部分配電 系統仍由 DG 受電所產生之獨立供電區域,此區域之電力系統亦稱微 電網(下文用詞以微電網模式運轉取代孤島運轉),微電網中視其 DG 電壓與頻率調整能力亦可容許有次微電網之存在。系統運轉於併網模 式與運轉於微電網模式,其保護協調與 DG 控制方式有明顯不同,因 此,需具備微電網模式運轉偵測能力,以便及時調適保護裝置之設定,
並調整相關 DG 的電壓與頻率控制方式。
微電網模式運轉偵測技術主要可分為遠端偵測與本地偵測,遠端 偵測是以通訊為基礎,主要是用監視控制與資料擷取 (Supervisory Control and Data Acquisition, SCADA)技術監視配電系統相關的斷路器 或開關的狀態,然後產生一個跳脫訊號,經由通訊的媒介,迅速跳脫 分散式電源,缺點是容易受雜訊的影響且其設備昂貴,優點為無偵測 不感帶(Non Detection Zone, NDZ)的存在。本地偵測又可分為主動式和 被動式[7],前者是對變流器主動施以一電壓或頻率週期性之擾動,當 發生微電網模式運轉時,藉由擾動破壞功率平衡狀態,造成系統之電 壓、頻率變動,以達到保護偵測的目的,但因演算法過於複雜,故難 以實現於實際應用上;後者是在 PCC 點上注入一微量的非基頻諧波電 氣信號,然後觀察相關匯流排的電壓、電流及諧波量的變化,進而判 斷孤島現象的發生,但存在著偵測不感帶(Non Detection Zone, NDZ) 的問題,兩者偵測法之比較如表 1-1、表 1-2[7]。
4
表 1-1 各主動式偵測法之優缺點比較表
偵測方法 優點 缺點
自動頻率漂移法 (AFD)
NDZ 變小。
可靠度高。
快速偵測。
易受到電流諧波影響。
多台 DG 併網,若頻率偏移方 向不一致,其作用相互抵消。
滑差式頻率位移法 (SMS)
NDZ 變小。
與 AFD 不同之處為 電力調節器改變輸 出電流頻率同時,
輸出電流起始相位 一也改變。
電流起始角和負載角之和為 零,若這時輸出頻率僅在容許 範圍內,偵測會失敗。
電壓脈擾動法
無 NDZ 的困擾。 擾動脈波大小間接影響偵測 靈敏度。
若 DG 發電量與負載平衡,判 斷失效。
主動電流擾動法
單台 DG 運轉時,
不存在 NDZ。
不受諧波影響。
目前未有產品,可行性僅限於 研究階段。
間次諧波注入法
不受到分散型電源 類型之影響,適用 於各分散型電源
容易受負載阻抗影響,設定不 易。
成本較高。
5
表 1-2 各被動式偵測法之優缺點比較表
偵測方法 優點 缺點
過/欠電壓電驛
不受機組慣性影響,反 應快。
成本較低。
易受系統擾動的影響,而 產生誤動作。
不適合作主保護。
相位跳躍電驛 (VSR)
目前已有產品,選擇性 多,裝置容易。
跳脫設定值不易設定。
微量之電力不平衡,偵測 將失效。
過/欠頻率電驛
作為 ROCOF 之後備。
成本較低。
反應時間不易掌控,不適 合當作主保護。
頻率變化率電驛 (ROCOF)
目前已有產品,選擇性 多,裝置容易。
與過/欠電壓、VSR 及頻 率電驛相比,NDZ 最 小。
跳脫設定值不易設定。
微量之電力不平衡,偵測 將失效。
功率變化率電驛 (ROCOP)
市電電源切離時,對於 微量之電力不平衡,亦 可偵測出來。
可偵測市電與 DG 之非 同步併聯。
抗系統擾動佳,電驛誤 動作機會小。
跳脫設定值不易設定。
目前未有產品,可行性僅 限於研究階段。
6
微處理器應用於製作保護電驛已盛行很久,早期設計只有簡單的 保護功能,隨著科技的進步,微處理器速度、容量、功能也日益提昇,
其中以數位信號處理器(Digital Signal Processor, DSP)最為其應用;DSP 是一種功能強大且非常快速的微處理器,其特性在於能夠即時處理數 位訊號,以便為連續的類比訊號進行測量或濾波。在進行數位訊號處 理之前必須先透過類比數位轉換器(ADC)將訊號從類比轉換成數位;
而數位訊號處理的輸出則再透過數位類比轉換器(DAC)變換為類比訊 號輸出。相較於一般的微處理器或類比 訊號處理設備而言,數位訊號 處理技術與設備具備彈性化、精確、抗干擾強、設備尺寸小、造價低 與速度快等優勢。故能開發及實現出結合數個保護電驛演算法、邏輯 判斷變迅速、處理速度快且具有通訊及人機介面等等多功能之數位保 護電驛[8]。矽智產(Intellectual Property, IP)為使用硬體描述語言事先撰 寫好且已經過驗證的功能模組,設計上導入其可重複使用(Reuse)的觀 念,利用現成可用的 IP 來設計電路,可縮短開發時間與減少開發成 本。
1.3 研究方法
本文應用數位信號處理器 DSP 製作併網型分散式電源數位保護 電驛裝置,軟體方面包含各硬體間的相互聯絡、參數偵測法與相關演 算法,如過/欠電壓、過電流、過/欠頻率、頻率變化率與相位跳躍等,
並使用 CCS 軟體對各併網控制與併網保護演算法進行模擬,確保時序 與功能之正確性;硬體方面則包含控制、數位訊號控制器、量測、數 位輸入/輸出、電源、人機介面與背板等 7 大模組。接著將製作的併網 控制與併網保護之程式下載至數位信號處理器晶片以及模組相關程式 下載至各自微處理器晶片並作結合,即完成併網型分散式電源數位保 護電驛裝置原型機。為了驗証併網型分散式電源數位保護電驛裝置性
7
能及可靠度,本文依照相關標準,先以 Matlab/Simulink 建立範例測試 電路並模擬併網運轉發生時斷路器兩端之電壓與電流波形,再透過波 形重現器將波形實際送入併網型分散式電源數位保護電驛裝置進行測 試,檢視併網型分散式電源數位保護電驛裝置併網情形與跳脫情形和 記錄相關測試結果及數據,並對此進行分析與探討。
1.4 論文架構
本論文架構共分為七章,各章內容簡述如下:
第一章 緒論
分別敘述研究背景與動機、文獻回顧、研究方法與論文架構。
第二章 微電網
首先介紹微電網之架構,陸續詳談國際相關研究現況、微電網之 運轉偵測、保護協調、倂網控制與相關分散式電源標準。
第三章 DSP 及 MCU 發展系統
分別介紹 DSP 與 MCU 在本研究中所使用到的軟硬體特性、功能 綜述與程式燒錄器。
第四章 併網型分散式電源數位保護電驛裝置之建構
首先介紹 IED 之基本架構,陸續詳談偵測參數演算法、相關電驛 之建構測試與倂網控制設計
第五章 併網型分散式電源數位保護電驛裝置之硬體模組設計
分別介紹電源模組、數位信號控制器模組、控制模組、量測模組、
人機介面模組、數位輸入/輸出模組與背版模組之設計。
第六章 併網型分散式電源數位保護電驛裝置之測試及分析
分別介紹範例系統之建立、波形重現模擬器、環境模擬平台與相
8
關測試與分析。利用 Matlab/Simulink 建立微電網運轉相關測試電路並 進行模擬,取得模擬之波形經由波形重現器將模擬波形送入併網型分 散式電源數位保護電驛裝置,以驗證裝置性能。
第七章 結論與未來研究方向
對本文所作之研究做出結論並提出未來相關研究方向。
9
第二章 微電網
2.1 簡介
微電網是由微型電源與負載所組成的系統,它可以同時提供電力 和熱能,微電網內部的電源主要由電力電子裝置處理電能的轉換,並 提供必要的控制,微電網相對於外部的電力系統,可視為為單一的受 控單元,並可同時滿足用戶對電能品質與供電安全的要求[9]。微電網 可以滿足區域負載的電力需求,區域負載可以是商業區和住宅區,或 者是傳統電力系統供電成本太高或無法到達的區域,相對於傳統的輸 配電系統,微電網的結構比較靈活。
2.2 微電網之架構
微電網架構如圖 2-1,為美國電力可靠性技術解決方案協會(The Consortium for Electric Reliability Technology Solutions, CERTS)所提出 的微電網基本架構圖[10]。
圖中包含 3 條饋線 A、B、C,網絡呈放射狀結構,微電網經由隔 離開關與市電電網連接,負載側之饋線電壓通常為配電等級之電壓或 適合用戶端之電壓。饋線 A、B 含敏感性負載,即重要負載,根據用 戶的負載需求,分散式電源安裝在饋線上的不同位置。饋線 B 所帶分 散式電源可實現熱電聯供。每個分散式電源出口都具備電力潮流控制 器,即功率和電壓控制器,可在能源管理系統或本地控制下,調整各 自的電力潮流。
10
圖 2-1 CERTS 所提出之微電網架構圖
當線路上發生故障時,隔離開關斷開,形成一個獨立供電的分散 式電源系統,以保證敏感性負載的不間斷供電。各分散式電源需作電 壓控制,調整輸出電壓,以減少無功環流。故障事件排除後,微電網 依標準重新倂網運轉。
圖 2-1 只是微電網的一種型式,具體的結構隨分散式電源的型式 與負載之需求而有所不同,如敏感性與重要的負載對電力品質與可靠 度的要求更高,但基本上微電網係由分散式電源、負載、以及運轉上 必須具備的電能管理系統與保護設備所組成,並視需要考慮儲能裝置,
而大部份的分散式電源係經由電力電子裝置併接到饋線上。
2.3 國際相關研究之現況
作為一個新的技術領域,微電網在各國的發展呈現不同特色,有 各自的規範及研究,在歐美一些發達國家,微電網的研究已經取得了 更進一步的發展,以下舉數個國家來作探討。
11
美國 CERTS 於 2002 年提出了微電網概念[10-11]。微電網方面的 研究得到了能源部的高度重視,並在”GRID2030”發展策略中將微電網 視為未來電力系統的三大技術之一。CERTS 所提出的微電網主要是由 容量小於 500kW 的小型分散式電源與負載所構成,並引入了電力電子 技術的控制方法,基於此形成了”隨插即用”[18]的控制思想和設計理 念。目前,美國 CERTS 微電網的初步理論研究成果已經在威斯康辛 大學的實驗室平台上得到了成功驗證。自第一個微電網示範工程 MAD RIVER 之後,俄亥俄州、佐治亞州及加州大學柏克萊實驗室也陸續展 開微電網相關的研究。學者們希望進一步的了解微電網保護和控制策 略以及經濟效益等,並初步訂定關於微電網的管理政策和法規,故 IEEE 協調委員會為此訂定了 IEEE Std 1547,為將來的微電網工程建 構其框架。
1. 異常電壓之保護要求
IEEE Std 1547 對於電壓變動之保護要求如表 2-1 所示[12],針對 發電量在 30kW 以下之分散型電源所制定,發電量在 30kW 以上者須 以個案考慮。
表 2-1 互連系統對異常電壓之響應
電壓範圍(基準電壓之百分比)a 清除時間(s)b
V < 50 0.16
50 ≦ V < 88 2.00 110 < V < 120 1.00
V ≧ 120 0.16
註: a 為依 ANSI C84.1 規定,電壓基準值為標稱系統電壓;b 為 DG≦30kW 之最大清除時間;DG
≧30kW 之解聯時間可調。
12
2. 異常頻率之保護要求
IEEE Std 1547 對於異常頻率之保護要求如表 2-3 所示[12],針對 發電量在 30kW 以下之分散型電源所制定,發電量在 30kW 以上者須 以個案考慮。
表 2-2 互聯系統對於異常頻率之保護要求
分散式電源之
容量(kW) 頻率範圍(Hz) 清除時間(s)
30
> 60.5 0.16
< 59.3 0.16
>30
> 60.5 0.16
< 59.8 - 57(可調設定點) 可調整 0.16 至 300
< 57 0.16
註:分散式電源30 kW,最大清除時間; 分散型電源 30kW,預設清除時間。
3. 諧波電流的限制
分散型電源所注入配電系統諧波電流之限制如表 2-4 所示[12]。
表 2-3 最大諧波電流失真率限制規範
個別的諧波 級數 h (奇次諧波)
h 11 11h17 17h23 23h35 35h
總諧波失真 (TDD)
百分比 (%) 4.0 2.0 1.5 0.6 0.3 5.0
註:偶次諧波限制為上述奇次諧波限制值之 25%
4. 同步互聯系統的參數極限之互聯標準
對於分散型電源同步互聯於配電系統的互聯標準如表所示[12]。
13
表 2-4 同步互聯系統參數極限之互聯標準
分散式電源之 容量(kVA)
頻率差 (f Hz, )
電壓差 (V, %)
相位角度差 (,°)
0~500 0.3 10 20
>500~1500 0.2 5 15
>1500~10000 0.1 3 10
5. 電壓閃爍的限制
對於電壓閃爍的標準,規定「分散型電源不可引起使區域電力系 統內其他用戶可察覺之電壓閃爍現象」,其中所謂「可察覺之電壓閃爍」
是參考 IEEE 519–1992 之規定[13]。
6. 輸出電流中直流成分的限制
輸出電流中直流成分的標準,為不可超過分散型電源額定輸出電 流大小的 0.5%。
7. 孤島運轉
當非計畫性的孤島運轉發生時,分散型電源須於 2 秒內檢測出並 停止對配電系統供電,而計畫性的孤島運轉則無此要求。
日本一直著重於微電網研究,其發展目標主要定位於能源供給多 樣化,減少污染,滿足用戶的個性化電力需求。然而再生能源的功率 波動可能降低電能和供電可靠性。因此,日本學者提出了系統構想,
其主要思想是在配電網中加入一些彈性交流輸電系統(FACTS)裝置,
利用其快速、彈性的控制性能,滿足用戶多種電力品質要求。還將該 思想與熱電聯供設計理念相結合,以實現環境維護和能源的高利用率。
此外,日本還專門成立了新能源與工業技術發展組織(NEDO)來協調學 校、企業與國家重點實驗室對新能源及其應用的研究。日本的「分散
14
型電源系統連繫技術指針」[14-15],為日本電氣協會針對分散型電源 併網所訂定的併聯技術最小需求標準,其中電壓變動可分為四個部份,
茲分述如下。
1. 低壓配電線的連接
(1) 已經使用變頻器的發電設備,如果發電設備產生的逆送潮流造 成低壓家庭用電電壓變動超過容許範圍(101±6 V、202±20 V)之 虞,對於發電設備設置者,必須應用具有進相虛功控制以及輸 出功率控制等類似功能之設備,以達成自動電壓調整,如果已 應用上述之方法仍無法將電壓維持在變動容許範圍內,則必須 增加配電線的容量。然而,對於單相兩線式 2 kVA 以下,單相 三線式 6 kVA 以及三相三線式 15 kVA 以下的低功率變頻器來說,
進相虛功控制機能以及輸出功率控制機制可以省略之。
(2) 使用自激式的變頻器,可自動維持發電機的同步,使用他激式 的變頻器, 併聯時瞬間電壓突降不得超過 10 %,發電業者要裝 設限流的設備,若裝設限流設備還未能改善,則必須增加配電 線容量或規定發電業者只能使用自激式的變頻器。
(3) 如果使用同步型發電機,要有自動同步的裝置,若使用感應型 發電機,併聯時瞬間電壓突降不得超過 10 %,發電業者要裝設 限流的設備,若裝設限流設備還未能改善,則必須規定發電業 者只能使用同步型發電機。
(4) 風力發電機併聯的狀況下,輸出變動頻繁且併/解聯產生電壓變 動對其他裝置的影響,發電業者要裝設抑制電壓變動的設備且 減低併解聯的次數,若裝設抑制電壓變動設備且減低併解聯的 次數還未能改善,則必須增加配電線的容量或是使用專線來併 網。
15
2. 高壓配電線的連接
(1) 分散式電源與一般配電系統併網,切離後造成家庭配線電壓變 動超過容許範圍(101±6 V、202±20 V)時,發電業者要有避免負 載過載的對策,若裝設補償設備還未能改善,則必須增加配電 線的容量或是使用專線來併網。
(2) 分散式電源造成的逆送潮流使家庭配線電壓變動超過容許範圍 (101±6 V、202±20 V)時,發電業者要裝設自動電壓調整的設備,
若裝設自動電壓調整的設備還未能改善,則必須增加配電線的 容量或是使用專線來併網。
(3) 如果使用同步型發電機,要有自動同步的裝置,若使用感應型 發電機,併聯時瞬間電壓突降不得超過 10 %,發電業者要裝設 限流的設備,若裝設限流設備還未能改善,則必須規定發電業 者只能使用同步型發電機。
(4) 使用自激式的變頻器,可自動維持發電機的同步,使用他激式 的變頻器, 併聯時瞬間電壓突降不得超過 10 %,發電業者要裝 設限流的設備,若裝設限流設備還未能改善,則必須規定發電 業者只能使用自激式的變頻器。
(5) 風力發電機併聯的狀況下,輸出變動頻繁且併解聯產生電壓變 動對其他裝置的影響,發電業者要裝設抑制電壓變動的設備且 減低併解聯的次數,若裝設抑制電壓變動設備且減低併解聯的 次數還未能改善,則必須增加配電線的容量或是使用專線來併 網。
3. 重點網路(Spot network)配電線的連接
(1) 如果分散式電源切離,造成系統電壓值低於容許範圍(額定電壓 1~2 %以內),發電業者要裝設補償設備,以防止系統電壓超過
16
容許範圍。
(2) 如果使用同步型發電機,要有自動同步的裝置,若使用感應型 發電機,併聯時瞬間電壓突降不得超過 10 %,發電業者要裝設 限流的設備,若裝設限流設備還未能改善,則必須規定發電業 者只能使用同步型發電機。
(3) 使用自激式的變頻器,可自動維持發電機的同步,使用他激式 的變頻器, 併聯時瞬間電壓突降不得超過 10 %,發電業者要裝 設限流的設備,若裝設限流設備還未能改善,則必需規定發電 業者只能使用自激式的變頻器。
4. 特別高壓配電線的連接
(1) 如果發電設備併網所造成的電壓變動超過容許範圍(約正常時 電壓之 1~2 %)之虞,發電業者應設置自動電壓調整機制等相關 設備以改善之。
(2) 如果使用同步型發電機,要有自動同步的裝置,若使用感應型 發電機,併聯時瞬間電壓突降不得超過 2 %,發電業者要裝設 限流的設備,若裝設限流設備還未能改善,則必須規定發電業 者只能使用同步型發電機。
(3) 使用自激式的變頻器,可自動維持發電機的同步,使用他激式 的變頻器, 併聯時瞬間電壓突降不得超過 2 %,發電業者要裝設 限流的設備,若裝設限流設備還未能改善,則必須規定發電業 者只能使用自激式的變頻器。
歐洲依據”智慧型電網”計劃提出了充分利用分散式電源、智能技 術與先進電力電子技術等,以實現集中供電與分散式發電的高效緊密 結合。微電網被視為未來分散式網絡的基本特徵以及未來歐州電力網 路策略研究議程的重要組成部分。目前歐洲已初步形成了微電網的運
17
轉、控制、保護、安全及通信理論。其後續任務集中於研究更先進的 控制策略與制定相關的標準,在希臘、荷蘭與德國建立範例工程[16-17],
為分散式電源與再生能源的大規模併網以及傳統電網向智慧型電網的 過渡做積極的準備。
除了上述國家外,加拿大、澳大利亞等國也展開了微電網之研究。
從各國對未來電網的發展策略和對微電網技術的研究與應用中可清楚 看出,微電網的形成與發展絕不是對傳統集中式、大規模電網的革命 與挑戰,而是代表著能源利用意識、環保意識的一種提高與改變,微 電網是未來電網實現高效、環保、優質供電的一個趨勢。
2.4 微電網之運轉偵測
微電網模式運轉偵測技術基本上有主動式與被動式之分,依系統 結構、運轉條件與 DG 型式之不同而有其相異之適用性。主動式主要 有間次諧波注入法、自動頻率漂移法與滑差式頻率飄移法;被動式偵 測原理則有電壓偵測法、電流偵測法、頻率偵測法、功率偵測法、電 流總諧波量偵測法、複合式電力量偵測法等。本研究將針對微電網之 運轉特性,測詴各不同偵測法之靈敏度與可靠度,並研擬混合保護理 論,開發更適用於微電網(或次微電網)模式運轉之偵測技術。
本研究以運轉的方式分成兩種模式[7],分別為倂網模式與微電網 模式。當兩種運轉模式切換時,需考慮一些議題如電力轉供時的穩定 度及其反應速度等。以下作個簡單的說明。
1. 併網模式 意指市電電網與微電網倂網連接的模式。微電網在併網模式運轉
時,微電網與傳統電網類似,可同時利用微電網內 DG 發電與市電電 網吸取電能,並能在自 DG 自身電力充足時向電網輸送多餘電能。當
18
外部市電電網發生故障停電時,微電網可通過能源管理單元控制斷路 器切斷與外界聯繫,讓微電網獨立運轉,形成微電網模式。
2. 微電網模式 意指因事件發生切離市電電網而使微電網獨立運轉的模式。微電
網模式運轉時電網內部負載全部由 DG 供給,當外部故障排除後,斷 路器可重新復閉,讓微電網重新與市電電網恢復同步運轉,以保證系 統平穩恢復到併網模式運轉狀態。
2.5 微電網之保護協調
微電網可能運轉於併網模式或微電網模式,當微電網運轉於併網 模式,若線路上發生短路故障,因市電電網側能提供足夠大之故障電 流,應用傳統之過電流電驛即可偵測與保護,對既有的保護協調並不 會造成影響。當系統運轉於微電網模式,依保護與協調之觀點而言,
微電網與傳統電力系統相較,其中變流器型(Inverter-based)DG 於外部 電路系統短路故障情況下,因半導體裝置額定之故,其所貢獻之故障 電流被限制在其額定電流值之 2 倍以內,於是傳統上以短路電流做設 計的過電流保護裝置將不會正常動作,因此無法將故障區域隔離以減 少停電範圍;若將過電流裝置的動作設定值調降以符合微電網的需求,
可能會因系統不平衡或過電流感測器太過靈敏而導致系統發生不必要 的跳脫。
系統的保護對策是不論市電電網或微電網發生故障時必須與予保 護,因此當市電電網發生故障時,需儘速將微電網與市電電網隔離,
以保護微電網的設備與負載。如果在微電網內發生故障時,需將故障 區域隔離以減少停電範圍。當微電網與市電併聯運轉或是在微電網模 式運轉時,有相同的保護策略是系統保護的設計理念,不論市電電網
19
或微電網發生任何型態的故障時,需將市電電網與微電網隔離,並且 當微電網模式運轉下發生故障時,亦有能力將故障清除,此部份必須 發展不需仰賴很大的故障電流即可偵測故障,進而將故障區域隔離。
微電網倂網運轉需要滿足一定的電壓和頻率條件,但與常規的發 電機組不同,由於微電網中分散式電源的種類和特徵不同,需要一些 特殊的協調控制方式才可滿足倂網運轉的條件。為了滿足負載對系統 電壓和頻率的要求,隨著微電網中負載的變動,需針對微電網中的分 散式電源採取相關的協調控制措施。由於其供電設備種類繁多、運轉 模式多樣與控制程度不同等,微電網中分散式電源的協調控制問題非 常複雜。從已有的參考文獻來看,有以下幾種控制策略:(1)主從站控 制[19](2)負載、頻率二次控制[20-21](3)連絡線(tie line)控制[22](4)基於 多代理技術的微電網控制方法(5)多微電網分層分散式控制[23-24]。對 於多微電網且複雜的系統,分散式控制策略和多代理控制策略結合是 最佳的選擇。
2.6 微電網之倂網控制
當微電網(或次微電網)中之 DG 運轉於微電網模式,於市電電網 電力恢復時,為提升電壓與頻率之穩定與故障保護之靈敏度,微電網 應具備與市電電網(或次微電網與微電網)自動偵測與自動同步併網之 能力,微電網之自動同步依其併聯控制技術之不同可分為三大部分:(1) 電流型 DG(如太陽能或小型風能)與微電網之併聯,(2)電壓型 DG 與微 電網之併聯,(3)微電網與市電電網之併聯。微電網與市電電網之併聯,
需比較兩電網電壓大小、頻率與相位,若完全相同即可併聯。
同步參考訊號是 DG 併網控制器之核心功能,本研究先以定頻方 式取樣電網電壓信號,利用離散傅立葉運算法,找出電網電壓電流之
20
實部與虛部成份,再利用數學式運算找出電壓大小與反三角函數運算 找出相位
,將所得值依倂網標準作自動同步併聯的判斷。此方法因 為需做大量的數學式運算,所以需使用較高階之運算處理器(如數位 信號處理器 DSP),另外由於固定取樣速率,當電網電壓之頻率發生 變動時,會影響相位角之精確值。以下作個詳細的敘述。1. 取樣時脈交錯取樣讀取V1及V2之電壓,每個週期取 32 點。
2. 使用 extended Complex Kaman filter 方法,估測電網電壓頻率f1與
f2。
3. 設定可程式時脈 fc=212
f
1,可使參考同頻訊號能產生頻率 f1之正弦 電壓,且每個電壓通道的取樣率為32 f1,使電網電壓在每個精準週 期 內被取樣 32 點。4. 利用傳立葉轉換計算取樣值,算出各電壓之實部、虛部後,再算 出電壓的大小V1, V2 及相位角1,2。
5. 判斷(f1,1,V1)是否與(f2,2,V2)相等,如果相等才可發出併網信 號。
2.7 本章小結
本章詳細敘述了微電網的基本架構,並介紹歐美數個發達國家目 前對微電網之研究現況以及相關的條約、標準;接著說明微電網之運 轉偵測、保護協調以及自動同步併聯倂網之控制等。
因為全球能源的危機及環境的惡化,DG 和微電網技術為解決該 問題提供了有效的解決途徑。世界各地都在進行大量的研究開發工作,
有關微電網的理論和實驗研究已經取得了一定成果。在我國對微電網 的研究則處於起步階段,如何根據我國電網的特點及需求建立微電網 則是目前首先研究之課題。
21
第三章 DSP 及 MCU 發展系統
3.1 簡介
傳統的信號處理或控制系統採用模擬技術進行分析和設計,處理 設備和控制器採用如電阻、電容和運算放大器等元件來實現。近幾年 來數位信號處理器(DSP)技術日漸成熟,也因數位信號處理器技術具彈 性、精確、抗干擾能力強、設備尺寸小、速度快、性能穩定等優點,
故在多項應用領域逐漸取代傳統模擬信號處理系統。
從一般性應用到特殊應用,TI 公司推出的 TMS320 DSP 家族覆蓋 了非常廣的應用領域,故用戶需充分瞭解各類數位信號處理器的特點 和適用領域。根據不同的領域,TI 公司推出了 3 個平台,具最佳控制 的 TMS320C2000 系列、具最低功耗的 TMS320C5000 系列與具最佳處 理能力的 TMS320C6000 系列。
TMS320C2000 系列 DSP 集微控制器和高效能 DSP 的特點於一身,
具強大的控制和信號處理能力,能夠實現複雜的控制及計算。此系列 晶片整合了 Flash 存儲器、A/D 轉換器、CAN 模組、RS-232 模組與多 組通用 I/O 通道等,此種整合使使用者可以以便宜的價格開發高性能 的控制系統,故於本文中選用此系列下之 TMS320F28335 晶片來作主 要的核心。
各個模組的微控制器(Microcontrollers)則選擇了 ATMEL 公司所推 出的 AT89 系列 Flash 下之 AT89S8253,AT89S8253 使用 ATMEL 公 司高密度非易失性存儲器技術製造,與工業 80C51 晶片指令和引腳完 全兼容。晶片上 Flash 允许程序存储器在系统可编程,亦適用於常规
22
编程器。
3.2 DSP 數位信號處理器
本研究使用 TI 公司所推出的 TMS320F28335 晶片,如圖 3-1 所示,
其功能相當的強大。以下根據資料手冊[25]中之資料整理出其晶片的 硬軟體特性與功能架構[26]。
圖 3-1 數位控制板 F28335 3.2.1 TI-TMS320F28335 之硬體特性
1. TMS320F28335 數位信號控制器。
2. 系統頻率 150MHz。
3. 高性能 32 位元浮點運算。
4. 68k bytes on-chip RAM
5. 512k bytes on-chip Flash memory 6. 256k bytes off-chip SRAM memory。
7. 具有 16 個 12bit 類比/數位 轉換器之通道 8. 30MHz 輸入時脈。
23
9. 板子上具有 RS-232 連接埠與線路驅動。
10. 板子上具有 CAN 2.0 介面線路驅動與連接埠。
11. 多工外部連接埠(Analog, I/O)。
12. 板子上支援 USB JTAG 控制器。
13. 5V 直流電源供應電壓。
14. 板子上具有 IEEE1149.1 JTAG 連接埠操作模擬。
3.2.2 TI-TMS320F28335 之軟體特性
1. TI F28xx Code Composer Studio Version3.3 發展軟體。
2. TI 於網路上提供了許多檔案與例題可供使用者下載參考。
3.2.3 TI-TMS320F28335 之功能架構
圖 3-2 為此 TI-TMS320F28335 的功能架構圖,包括了類比/數位轉 換器介面、通用輸入/輸出介面、通訊介面(CAN、RS-232、SCI、SPI、
McBSP 與 I2C 等)以及許多的功能,於下小節作詳細的介紹。
圖 3-2 TI-TMS320F28335 功能架構圖
24
3.3 TI-TMS320F28335 之功能綜述
於此節將會分別介紹本文中所會使用到之功能及相關特性。
3.3.1 系統時脈控制(Clock)
圖 3-3 為周邊時脈的架構圖。在 F28335 數位信號處理器中,所有 的時脈、鎖相、看門狗與低功耗模式等都有配置相對應的控制暫存器。
最主要的一個暫存器為周邊時脈控制暫存器(PCLKCR),主要控制晶 片上各個時脈的工作狀態、致能或禁止相關周邊模組的時脈。圖中之 LSPCLK 為低速周邊時脈,所相對應的暫存器為低速周邊時脈控制暫 存器(LOSPCP);HSPCLK 為高速周邊時脈,所相對應的暫存器為高速 周邊時脈控制暫存器(HISPCP)。
圖 3-3 周邊時脈架構圖
25
3.3.2 中斷(PIE)
圖 3-4 為外部與中斷擴展的架構圖[27]。周邊中斷擴展(Peripheral Interrupt Expansion, PIE)模組中有多個中斷源共用幾個中斷輸入信號,
PIE 最多可以支持到 96 個中斷,其中八個中斷分成一組,共用一個 CPU 中斷,故共有 12 組中斷(INT1 到 INT12)。每個中斷都會有自己 的中斷向量存放在 RAM 中,構成整個系統的中斷向量表,使用者可 依據自己所需適當地對中斷向量進行調整。在中斷時,CPU 將自動從 中斷向量表中得到所相對應的中斷向量。CPU 得到中斷向量和儲存重 要的暫存器必頇花費 9 個 CPU 時脈週期,因此 CPU 可快速地響應中 斷。此外,中斷的優先權可經由硬體與軟體來進行控制,每一個中斷 也可以在 PIE 模組內致能或禁用。
圖 3-4 外部與中斷擴展架構圖
26
C28x 的 CPU 支援了一個不可禁止中斷(NMI)和 16 個可禁止中斷 (INT1-INT14,RTOSINT 和 DLOGINT)共 17 個 CPU 中斷。C28x 有許 多周邊設備,每個周邊設備會產生一個或多個中斷,由於 CPU 沒有能 力處理所有 CPU 級的中斷請求,因此需要一個 PIE 控制器來處理各種 的中斷請求。系統中 PIE 中斷向量表是存放每個中斷程序的位址,每 個中斷都有自己的中斷向量,在系統初始化時,需要定位中斷向量表,
在操作時也可對中斷向量表的位置進行調整。以下將介紹三種中斷。
1. 周邊級中斷(Peripheral Level)
當周邊產生中斷時,中斷旗標暫存器相對應的位元(IF)將被設定 為 1,如果中斷致能暫存器相對應的位元(IE)也被設定為 1,則周邊產 生的中斷將向 PIE 控制器發出中斷申請,如果週周邊級中斷沒有被致 能,IF 將保持不變,除非使用軟體清除,如果中斷產生後才被致能且 IF 沒有清除,同樣會向 PIE 申請中斷。需要注意的是,周邊暫存器的 中斷旗標必頇使用軟體進行清除。
2. PIE 級中斷(PIE Level)
PIE 模組共用 8 個周邊中斷引腳向 CPU 請求中斷,這些中斷被分 成 12 組,每組有個中斷信號向 CPU 請求中斷。例如:PIE 第 1 組共 用 CPU 的中斷 1(INT1),PIE 第 2 組共用 CPU 的中斷 12(INT12),其 他的中斷直接接到 CPU 中斷上且不共用。
對於不共用的中斷,PIE 直接將這些中斷連接到 CPU,對於共用 中斷,在 PIE 模組內有相對應的中斷旗標暫存器(PIEIFRx)與致能暫存 器(PIEIERx)。除此之外,各組 PIE 中斷(INT1~INT12)有一個響應旗標 暫存器(PIEACK)。典型的 PIE 與 CPU 中斷響應流程圖如圖 3-5 所示。
27
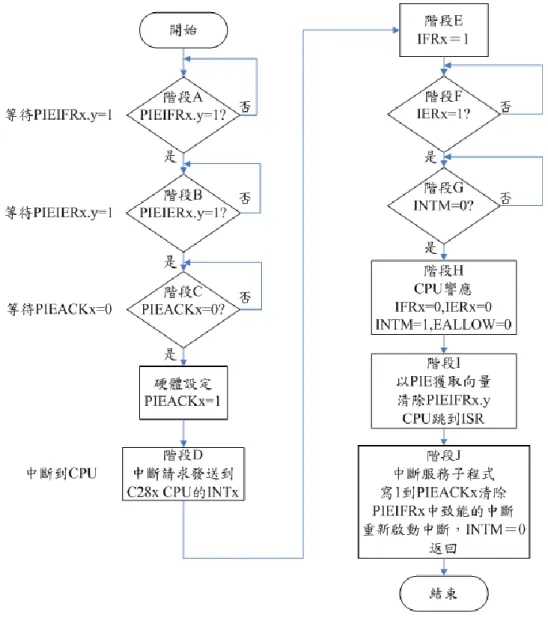
圖 3-5 典型的中斷響應流程圖
一旦 PIE 控制器有中斷產生,相對應的中斷旗標位元(PIEIFRx.y) 將被設定為 1。如果相對應的中斷致能位元(PIEIERx.y)也被設定為 1,
PIE 將檢查相對應的 PIEACKx,確定 CPU 是否準備響應中斷的動作,
如果相對應的 PIEACKx 被清除為 0,PIE 將向 CPU 請求中斷。如果 PIEACKx 被設定為 1,PIE 將等待,直到相對應的 PIEACKx 被清除才 向 CPU 申請中斷[27]。
28
3. CPU 級中斷(CPU Level)
一旦向 CPU 請求中斷,CPU 級中斷旗標(IFR)與相對應的 INTx 將被設定為 1。中斷旗標被存在旗標暫存器後,只有 CPU 中斷致能暫 存器(IER)或調整中斷暫存器(DBGIER)和全局中斷遮除(INTM)被致能 時,才能回應中斷請求。
3.3.3 CPU 計時器(CPU Timer)
圖 3-6 為 CPU 計時器方塊圖[27]。此晶片含有三個 32 位元的 CPU 計時器(TIMER0/1/2),如。其中 CPU-Timer0 和 CPU-Timer1 是給使用 者在應用程式裡去做使用,只有 CPU-Timer2 是預留給操作系統使用 (DSP-BIOS),如果 CPU-Timer2 沒有使用在 DSP-BIOS 上,CPU-Timer2 也可給使用者在應用程式裡去作使用。
圖 3-6 CPU 計時器方塊圖
圖 3-7 為 CPU 計時器中斷信號方塊圖 [27]。三個 CPU 計時器中 斷信號(TINT0、TINT1、TINT2)在處理器內部連接不盡相同。
29 28x
CPU
1
12 INT to INT
13 INT
14 INT
PIE CPU-TIMER 0
CPU-TIMER 1 (操作系統使用)
CPU-TIMER 2 (操作系統使用) 1
INT
2 INT
13 XINT
圖 3-7 CPU 計時器中斷信號方塊圖
計時器在操作過程中,首先使用 32 位元計數暫存器(TIMH:TIM) 讀取週期暫存器(PRDH:PRD)內部之值。計數暫存器根據
SYSCLKOUT 中之數值去作遞減,當計數暫存器中之數值為 0 時,計 時器中斷輸出信號產生一個中斷脈衝。
3.3.4 類比數位轉換(ADC)
圖 3-8 為 ADC 模組方塊圖[28]。ADC 模組是一個 12 位元類比數 位轉換器(ADC),由圖可見在此模組內的類比電路包含了多路選擇器 (MUXs)、取樣/保持(S/H)電路、轉換核心、電壓參考以及其他模擬輔 助之電路;此模組內的數位電路包含了可程式轉換序列器、結果暫存 器、與周邊匯流排之連接介面以及與晶片上其他模組的連接介面。
ADC 模組有 16 個通道,配置成兩組獨立的 8 通道模組,分別支援脈 波寬度調變模組。兩組獨立的 8 通道模組也可以串聯成一個 16 通道的 模組。雖然在 ADC 模組中有多個輸入通道和兩個排序器,但是卻只 有一個轉換器。
30
圖 3-8 ADC 模組方塊圖
兩個 8 通道模組能夠自動排序,每個模組可以通過多路選擇器 (MUXs)選擇 8 通道中的任何一個通道。在串聯模式下,自動排序器將 變成 16 通道。對於每個通道而言,一旦 ADC 轉換完成,會將轉換結 果儲存到結果暫存器(ADCRESULT)裡。自動排序器允許對同一個通道 進行多次取樣,使用者可以完成過取樣的算法,這樣可以獲得更高的 取樣精度。
ADC 模組主要包含以下特點:
1. 12 位元類比數位轉換(ADC)與兩組取樣/保持(S/H)器。
2. 同時取樣或順序取樣模式。
3. 類比電壓輸入範圍:0V〜3V。
4. 快速轉換時間,ADC 時脈 12.5Mhz,也就是 80ns 最高取樣寬 6.25MSPS。
5. 16 個類比輸入通道。
6. 自動排序功能支援 16 通道獨立循環〝自動轉換〞,每次轉換的通 道可用軟體程式選擇。
31
7. 排序器可以工作在兩個獨立的 8 通道排序器模式,也可工作在 16 通串聯模式(兩個 8 通道串聯)。
8. 16 個結果暫存器存放 ADC 的轉換結果,轉換後的數位值為:
(1) 數位值=0 輸入電壓≦0V (2) 數位值=4096
3 V ADCLO
(V=輸入電壓) 0V<輸入電壓<3V (3) 數位值=4095 輸入電壓≧3V 9. 多個觸發源啟動 ADC 轉換(Start of Conversion, SOC)
(1) S/W:軟體立即啟動。
(2) ePWM1-6:ePWM 中有多個來源可啟動 ADC 轉換。
(3) 外部接腳:GPIO XINT2。
10. 靈活的中斷控制,允許在每次轉換或是每個序列轉換結束後產生 中斷請求。
11. 排序器可以工作在啟動/停止模式,允許多個〝時間排序觸發〞同 步轉換。
12. ePWM 可以獨立觸發,在雙序列模式。
13. 取樣/保持(S/H)與取樣寬度可個別分開控制。
3.3.5 通用輸入/輸出(GPIO)
在 F8335 數位信號處理器上提供了多個數位通用輸入/輸出(GPIO) 接腳,這些接腳絕大部份是多功能共用接腳,通過 GPIO MUX 暫存器 來選則配置具體的功能。這些數位 GPIO 接腳可以獨立操作也可以作 為周邊 I/O 的信號(通過 GPxMUX 暫存器配置)使用。如果接腳使用在 數位 I/O 模式,通過方向控制暫存器(GPxDIR)即可控制數位 I/O 的方 向,並且也可以通過量化暫存器(GPxQUAL,GPACTRL 和 GPBCTRL 暫存器)輸入信號以消除外部雜訊信號[27]。
32
如果多功能接腳設置為數位 I/O 模式,晶片將提供暫存器來相對 應的接腳進行操作。GPxSET 暫存器設置各個數位 I/O 的的信號;
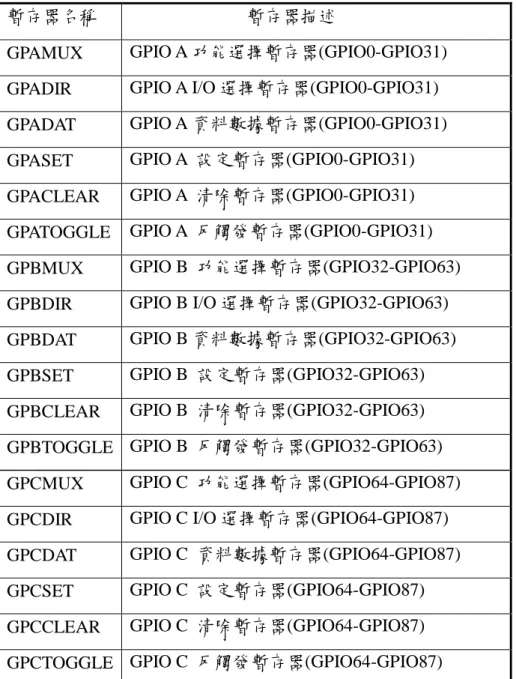
GPxCLEAR 暫存器清除了各個 I/O 的信號;GPxTOGGLE 暫存器反信 號觸發各個 I/O 信號;GPxDAT 暫存器讀取/寫入(R/W)各個數位 I/O 信 號。表 3-1 為 GPIO 的各個資料暫存器說明[27]。
表 3-1 GPIO 暫存器說明
暫存器名稱 暫存器描述
GPAMUX GPIO A 功能選擇暫存器(GPIO0-GPIO31) GPADIR GPIO A I/O 選擇暫存器(GPIO0-GPIO31) GPADAT GPIO A 資料數據暫存器(GPIO0-GPIO31) GPASET GPIO A 設定暫存器(GPIO0-GPIO31) GPACLEAR GPIO A 清除暫存器(GPIO0-GPIO31) GPATOGGLE GPIO A 反觸發暫存器(GPIO0-GPIO31) GPBMUX GPIO B 功能選擇暫存器(GPIO32-GPIO63) GPBDIR GPIO B I/O 選擇暫存器(GPIO32-GPIO63) GPBDAT GPIO B 資料數據暫存器(GPIO32-GPIO63) GPBSET GPIO B 設定暫存器(GPIO32-GPIO63) GPBCLEAR GPIO B 清除暫存器(GPIO32-GPIO63) GPBTOGGLE GPIO B 反觸發暫存器(GPIO32-GPIO63) GPCMUX GPIO C 功能選擇暫存器(GPIO64-GPIO87) GPCDIR GPIO C I/O 選擇暫存器(GPIO64-GPIO87) GPCDAT GPIO C 資料數據暫存器(GPIO64-GPIO87) GPCSET GPIO C 設定暫存器(GPIO64-GPIO87) GPCCLEAR GPIO C 清除暫存器(GPIO64-GPIO87) GPCTOGGLE GPIO C 反觸發暫存器(GPIO64-GPIO87)
33
1. GPxMUX 暫存器
每個 I/O 通道都有一個功能選擇暫存器。功能選擇暫存器配置 I/O 工作在周邊操作模式或是數位 I/O 模式。系統重設時,將所有 GPIO 配置成 I/O 功能。
(1) 如果 GPxMUX.bit=0,配置為 I/O 功能。
(2) 如果 GPxMUX.bit=1,配置為周邊功能。
2. GPxDIR 暫存器
每個 I/O 通道都有方向控制暫存器。用來配置 I/O 的方向(輸入/
輸出)。系統重設時,所有 GPIO 為輸入。
(1) 如果 GPxDIR.bit=0,接腳配置成數位輸入。
(2) 如果 GPxDIR.bit=1,接腳配置成數位輸出。
3. GPxDAT 暫存器
每個 I/O 通道都有資料數據暫存器。資料數據暫存器是 R/W 暫存 器,如果 I/O 配置成輸入,則顯示出當前 I/O 輸入信號的狀態。如果 I/O 配置為輸出,則設定 I/O 的輸出。
(1) 如果 GPxDAT.bit=0 , 且 設置 為輸出 功能 ,將 對應 的接 腳 輸 出電位降低。
(2) 如果 GPxDAT.bit=1 , 且 設置 為輸出 功能 ,將 對應 的接 腳 輸 出電位拉高。
4. GPxSET 暫存器
每個 I/O 通道都有設定暫存器。此暫存器是個寫入暫存器,任何 讀取操作都無反應。如果對應的接腳配置成數位輸出,設定 1 後相對 應的接腳電位將被拉高,設定 0 則無影響。
(1) 如果 GPxSET.bit=0,無影響。
34
(2) 如果 GPxSET.bit=1,且接腳配置為輸出,將對應的接腳設置成 高電位。
5. GPxCLEAR 暫存器
每個 I/O 通道都有清除暫存器。此暫存器是個寫入暫存器,任何 讀取操作都無反應。如果對應的接腳配置成數位輸出,設定 1 後相對 應的接腳電位將被降低,設定 0 則無影響。
(1) 如果 GPxSET.bit=0,無影響。
(2) 如果 GPxSET.bit=1,且接腳配置為輸出,將對應的接腳設置成 低電位。
6. GPxTOGGLE 暫存器
每個 I/O 通道都有反觸發暫存器。此暫存器是個寫入暫存器,任 何讀取操作都無反應。如果對應的接腳配置成數位輸出,設定 1 後相 對應的接腳電位取反電位,設定 0 則無影響。
(1) 如果 GPxSET.bit=0,無影響。
(2) 如果 GPxSET.bit=1,且接腳配置為輸出,將對應的接腳取反電 位。
3.3.6 串列通訊介面(SCI)
串列通訊接口(SCI)是採用雙向通訊的非同步串列通訊介面,即 UART 介面。為減少串列通訊時 CPU 的功耗,此晶片的串列通訊介面 支援了 16 級接收與傳送 FIFO。SCI 模組採用標準非歸 0(NRZ)資料格 式,可以與 CPU 或其他通訊資料格式相容的非同步周邊進行數位通訊。
當不使用 FIFO 時,SCI 接收器及傳送器採用 雙級緩衝傳送暫存器,
於全雙工模式下也可以同時操作。
為保證資料的完整,SCI 模組對接收到的資料進行間斷、同位元
35
與錯誤的偵測。透過對 16 位元鮑伯率控制暫存器依不同的 SCI 通迅 速率來進行編程。
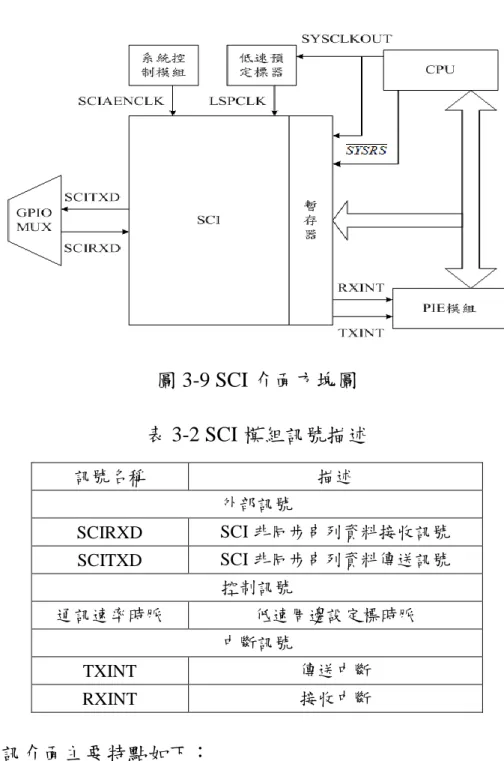
圖 3-9 為 SCI 與 CPU 間介面的方塊圖,表 3-2 為 SCI 模組訊號描 述。
圖 3-9 SCI 介面方塊圖 表 3-2 SCI 模組訊號描述
訊號名稱 描述
外部訊號
SCIRXD SCI 非同步串列資料接收訊號
SCITXD SCI 非同步串列資料傳送訊號
控制訊號
通訊速率時脈 低速周邊設定標時脈
中斷訊號
TXINT 傳送中斷
RXINT 接收中斷
SCI 通訊介面主要特點如下:
1. 兩個外部接腳:
兩個接腳為多功能共用接腳,可以作為通用輸入輸出。
36
(1) SCITXD:SCI 資料傳送接腳。
(2) SCIRXD:SCI 資料接收接腳。
2. 64k 種通迅速率。
3. 資料格式:
(1) 一個啟動位元。
(2) 可編程 1〜8 位元的資料長度。
(3) 可選擇奇/偶/無 同位元。
(4) 一個或兩個停止位元。
4. 4 個錯誤偵測旗標:同位元、超時、編制與間斷錯誤。
5. 兩種多處理喚醒模式:空閒線或位址位元。
6. 全/半雙工通訊。
7. 雙緩衝接收和傳送功能。
8. 傳送和接收可以採用中斷與旗標查詢兩種方式。
9. 獨立的傳送和接收中斷致能控制(BRKD 除外) 。 10. NRZ 通訊格式。
11. 13 個 SCI 模組控制暫存器,起使位址為 7050h。
12. 自動通迅速率檢測。
13. 16 級傳送/接收 FIFO。
3.4 MCU 微控制器
本文使用 ATMEL 公司所推出的 AT89S8253 晶片,其功能相當的 強大,以下根據資料手冊[29]中之資料整理出其晶片的硬軟體特性與 功能架構。
3.4.1 Atmel-AT89S8253 之硬體特性 1. 兼容 MCS-51 指令系统。
![圖 3-4 為外部與中斷擴展的架構圖[27]。周邊中斷擴展(Peripheral Interrupt Expansion, PIE)模組中有多個中斷源共用幾個中斷輸入信號,](https://thumb-ap.123doks.com/thumbv2/9libinfo/9129281.413328/39.892.178.721.574.1098/為外部與中斷擴展架構邊中斷擴PeripheralInterrupt模組中有多個中斷源共用幾個中.webp)
![圖 3-6 為 CPU 計時器方塊圖[27]。此晶片含有三個 32 位元的 CPU 計時器(TIMER0/1/2),如。其中 CPU-Timer0 和 CPU-Timer1 是給使用 者在應用程式裡去做使用,只有 CPU-Timer2 是預留給操作系統使用 (DSP-BIOS),如果 CPU-Timer2 沒有使用在 DSP-BIOS 上,CPU-Timer2 也可給使用者在應用程式裡去作使用。](https://thumb-ap.123doks.com/thumbv2/9libinfo/9129281.413328/42.892.205.725.621.860/計時器方塊圖晶片含有三個位元計時TIMER其中是給使用在應用程式裡.webp)