行政院國家科學委員會專題研究計畫 成果報告
閥控液壓系統節能控制與伺服控制之整合研究-以電液負載 感測系統實現(3/3)
計畫類別: 個別型計畫
計畫編號: NSC91-2212-E-011-018-
執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日 執行單位: 國立臺灣科技大學工程技術研究所
計畫主持人: 江茂雄
計畫參與人員: 簡御偉、鄒丹妮、張瑛淑、蔡金江、葉永培、郭倉旻
報告類型: 完整報告
處理方式: 本計畫可公開查詢
中 華 民 國 92 年 10 月 24 日
行政院國家科學委員會補助專題研究計畫成果報告 閥控液壓系統節能控制與伺服控制之整合研究
– 以電液負載感測系統實現
計畫類別: 個別型計畫 □ 整合型計畫 計畫編號:NSC 91-2212-E -011-018-
NSC 90-2212-E -011-054-
NSC 89-2212-E -011-051-
全程執行期間:89 年 8 月 1 日起至民國 92 年 7 月 31 日
計畫主持人:江茂雄
計畫參與人員:簡御偉、鄒丹妮、張瑛淑、
蔡金江、葉永培、郭倉旻
成果報告類型(依經費核定清單規定繳交):□精簡報告 完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計 畫、列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開 查詢
執行單位:國立臺灣科技大學工程技術研究所
中 華 民 國 九十二 年 十 月 十七 日
中文摘要
閥控液壓系統(hydraulic valve-controlled system)具有高響應之優點,
故常被應用於伺服控制系統中;然而,傳統閥控液壓系統中,泵之供油 壓力(supply pressure)由溢流閥(relief valve)設定為定值,其缺點在於能源 效率低,由泵輸出之高壓油,當流經控制閥時,僅部份液壓能由液壓作 動器(hydraulic actuator)轉換成機械能驅動機械系統,而多餘之液壓能在 此轉換成熱能。如此,一方面造成能源之浪費,降低效率,另一方面也 易使油溫升高,影響系統之性能。為了改善此缺點,使泵之供油壓力 (supply pressure)能依負載所需而自動調節。亦即,高負載時能提供較高 壓力,而低負載時能自動調節輸出低壓,如此將可改善閥控液壓系統能 源效率較低之缺點,此概念即所謂〝負載感測系統〞(Load-sensing system)。
本計劃旨在研究電液負載感測系統(Electro-hydraulic load-sensing system)應用於閥控液壓缸伺服系統中,全系統為二個閉迴路伺服控制 系統,故整合後之控制系統成為2 input/2 output 之 MIMO 複雜系統。而 控制泵之供油壓力有二方式實現:定轉速變排量泵及變轉速定排量泵。
定轉速變排量泵即以一閥控液壓缸控制泵之斜盤角度,控制其輸出流 量;而變轉速定排量泵則以變頻器改變AC 電動馬達之轉速,而控制輸 出流量。進而達到控制泵之供油壓力。
本計劃為三年期,執行期間由89 年度至 91 年度,區分如下:
第一年(NSC89-2212-E-011-051):以定轉速變排量泵實現電液負載感測 系統之節能控制
此部分正於89 年度計畫執行,以實現電液負載感測系統為目標,結 合傳統及現代控制理論(如Fuzzy,Robust control 等),實現負載感 測控制,使泵之供給壓力與負載缸所需之工作壓力之差保持為定值
(∆p=constant)。
控制(energy-saving control)
即電液負載感測系統結合閥控液壓缸系統伺服控制之研究。以閥控系 統而言,泵供油壓力較高時,系統會有較佳之動態響應,對工作缸性 能提升,控制精度較佳。故當電液負載感測系統調節控制泵之供油壓 力時,對工作缸之動態響應會有所影響,如何使系統兼具高響應之伺 服控制與節能控制之特性,為第二年(90 年度)研究探討之重點。
第三年(NSC91-2212-E-011-018):以變轉速定排量泵進行節能控制結 合伺服控制
以變頻器改變AC 馬達之轉速,控制定排量泵之輸出流量及供油壓 力,結合第二部分所發展之閥控液壓缸系統之伺服控制,比較變轉速 定排量泵系統與定轉速變排量泵系統對伺服控制之影響,此為第三年
(91 年度)之研究重點。
關鍵詞:閥控液壓系統、節能控制、伺服控制、位置控制、速度控制、
力控制、負載感測控制、定供油壓力控制、定排量變轉速泵、變排量定 轉速泵、適應性強健控制、基因演算法、H∞控制、解耦合模糊滑動平 面控制。。
Abstract
Hydraulic valve-controlled systems have high response, so they often are used in hydraulic servo control systems. However, In the traditional hydraulic valve-controlled system, supply pressure is set t constant by relief valve. The most serious disadvantage of such systems lies in the low energy efficiency. As the high pressure hydraulic oil supplied by pumps flow through direction valves, only a part of hydraulic energy is transferred into mechanical energy by hydraulic actuators. The additional hydraulic energy is transferred into heat to make the oil temperature rising. It makes both energy consuming which reduces the system efficiency and oil temperature rising which affects the system performance. In order to improve this problem, we make a hydraulic pump with variable displacement adjusting supply pressure automatically. That is, the supply pressure rises if external load increases. On the contrary, it becomes smaller automatically if external load reduces. Such a system is so-called ‘Load-sensing system’.
The objective of the research project is to develop and research an Electro-hydraulic Load-sensing System (ELS) used in a hydraulic valve-controlled cylinder system. Because the ELS is also a hydraulic valve-controlled cylinder control system, the overall control system is composed of the two servo control systems driven by two valve-controlled hydraulic cylinder systems respectively. Two concepts can be used to control the supply pressure of the pump, such as pump with constant rotational speed and variable displacement and that with variable rotational speed and constant displacement. For the pump with constant rotational speed and variable displacement, the supply pressure is controlled by the pump’s swash plate, which is controlled by a hydraulic valve-controlled cylinder system. For the variable rotational speed and constant displacement pump, the supply pressure is controlled by the rotational speed of the AC motor by means of a frequency converter.
The project is divided into three sections. The first one is to implement the ELS for energy-saving control, in the project NSC89-2212-E-011-051 during August 2000 to July 2001. The second part is to integrate the two control systems, i.e. ELS for energy-saving control and hydraulic valve-controlled cylinder servo control system for performance improvement in NSC90-2212-E-011-054. The supply pressure affects the dynamic response of the servo control system. So, how to control the two systems at the same time becomes the focus point during the second year, Aug. 2001~Jul. 2002. In the third part (NSC 91-2212-E-011-018), the pump system with variable rotational speed and constant displacement is used to combine with the servo control in the second part. The results will
2002~Jul.2003.
Keywords: hydraulic valve-controlled system , energy-saving control, servo control , path control, velocity control, force control, load-sensing control, constant supply pressure control, constant displacement variable rotational speed pump, variable displacement constant rotational speed pump.
目 錄
中文摘要………...1
英文摘要………...3
目錄………...5
第一章 緒論………...………....11
1.1 研究動機…………...11
1.2 電液負載感測系統………..13
1.3 文獻回顧………..16
1.3.1 電液負載感測系統………...16
1.3.2 整合控制系統………...16
1.3.3 控制理論………...17
1.4 研究目的與本文架構………..20
第二章 實驗機台架構與建立………...23
2.1 整合控制系統設計與建構..………....23
2.2 節能控制系統………..24
2.3 閥控液壓缸系統………..27
2.4 干擾缸系統………..29
2.5 PC-based 控制系統………...30
第三章 整合控制系統之數學模型建立………...31
3.1 系統線性數學模型的建立………..31
3.2 系統識別………..37
3.2.1 電液負載感測系統之參數鑑定………...38
3.2.2 閥控液壓缸系統之參數鑑定………...40
第四章 控制理論………...42
4.1 基因演算法與 H∞控制理論……….………...42
4.1.1 基因演算法……….………..42
4.1.2 H∞ 控制理論……….……...48
4.1.2.1 H∞ 控制的特性………...48
4.1.2.2 奇異值整型………51
4.1.2.3 廣義的控制問題………....55
4.1.2.4 H∞ 控制的使用時機與權重函數選擇………...58
4.1.2.5 H∞ 控制問題的解………...60
第II 部分 適應性強健控制理論………..64
4.2 適應性強健控制理論………..64
4.2.1 適應性強健控制器的基本原理與架構………...64
4.2.2 一階系統的 ARC 與不連續投影映像……….67
4.2.3 ARC 控制器應用在單進單出非線性系統………...69
4.2.4 ARC 控制器的特性………...73
第III 部分 解耦合自組織模糊滑動平面控制理論……….74
4.3 解耦合自組織模糊滑動平面控制理論………..74
4.3.1 模糊滑動平面控制理論………...74
4.3.1.1 模糊滑動平面控制器………....74
4.3.1.2 滑動平面選取………76
4.3.1.3 歸屬函數建立………....76
4.3.1.4 解模糊化法則………80
4.3.1.5 參數Φ、u0、Gu設定……….………...81
4.3.1.6 穩定性分析………81
4.3.2 自組織模糊滑動平面控制器………...82
4.3.2.1 自組織模糊控制器………82
4.3.2.2 自組織法則………....83
4.3.2.3 自組織模糊滑動平面控制器………....89
4.3.3 解耦合自組織模糊滑動平面控制理論………...92
第五章 控制器設計………...94
5.1 應用基因演算法與 H∞控制理論於整合系統之控制器設計………...94
5.1.1 負載感測系統節能控制器之設計………...94
5.1.2 閥控液壓缸系統軌跡控制器之設計……….101
5.1.3 閥控液壓缸系統速度控制器之設計……….105
5.2 應用適應性強健控制理論於整合系統之控制器設計………110
5.2.1 系統數學模型的建立……….110
5.2.1.1 閥控液壓缸系統………..110
5.2.1.2 電液負載感測系統………..111
5.2.2 應用適應性強健控制理論於整合系統之控制器設計……….112
5.2.2.1 閥控液壓缸伺服控制器之設計………..113
5.2.2.2 負載感測系統節能控制器之設計………..117
5.2.2.3 控制器的簡化………..120
5.3 解耦合自組織模糊滑動平面之控制器設計………121
5.3.1 整合控制系統之控制器設計概念……….122
5.3.2 自組織模糊滑動平面控制器設計流程……….123
第六章 整合節能控制與伺服控制之實驗……….125
第I 部分 結合基因演算法與 H∞控制整合節能控制與伺服控制 6.1 結合基因演算法與 H∞控制整合節能控制與伺服控制………..125
6.1.1 負載感測系統之閉迴路控制實驗………...126
6.1.2 整合軌跡控制與負載感測控制之實驗………...129
6.1.3 整合軌跡控制與定供油壓力控制之實驗……….133
6.1.4 整合速度控制與負載感測控制之實驗……….136
6.1.5 整合速度控制與定供油壓力控制之實驗……….139
6.1.6 負載感測系統與定供油壓力系統對閥控液壓缸伺服控制系統之動 態特性比較………...142
6.1.6.1 節能控制之效能分析………..142
第II 部分 適應性強健控制整合節能控制與伺服控制
6.2 適應性強健控制整合節能控制與伺服控制………146
6.2.1 負載感測系統之負載感測控制器………..147
6.2.1.1 負載感測系統之變轉速負載感測控制………...147
6.2.1.2 負載感測系統之變排量負載感測控制………...150
6.2.2 整合軌跡控制與節能控制………..152
6.2.2.1 整合軌跡控制與變轉速節能控制………...153
6.2.2.1.1 整合軌跡控制與變轉速負載感測控制………....154
6.2.2.1.2 整合軌跡控制與變轉速定供油壓力控制………....159
6.2.2.2 整合軌跡控制與變排量節能控制………..162
6.2.2.2.1 整合軌跡控制與變排量負載感測控制………....162
6.2.2.2.2 整合軌跡控制與變排量定供油壓力控制………...167
6.2.2.3 軌跡控制與傳統使用洩載閥設定最大供油壓力………...170
6.2.2.4 性能與效率分析………...………....172
6.2.3 整合速度控制與節能控制….……….………...174
6.2.3.1 整合速度控制與變轉速節能控制….………...174
6.2.3.1.1 整合速度控制與變轉速負載感測控制…...………...175
6.2.3.1.2 整合速度控制與變轉速定供油壓力控制….………...…..181
6.2.3.2 整合速度控制與變排量節能控制.……….………...…..184
6.2.3.2.1 整合速度控制與變排量負載感測控制………...….184
6.2.3.2.2 整合速度控制與變排量定供油壓力控制….…………....……..192
6.2.3.3 速度控制與傳統使用洩載閥設定最大供油壓力….…………...195
6.2.3.4 性能與效率分析…………...…197
第III 部分 解耦合自組織模糊滑動平面控制整合節能控制與伺服控制 6.3 解耦合自組織模糊滑動平面控制整合節能控制與伺服控制…...199
6.3.1 節能控制系統之節能控制…....………...…200
6.3.1.1 節能控制系統之負載感測控制…. ………...….200
6.3.1.2 節能控制系統之定供油壓力控制…………...203
6.3.2 整合軌跡控制與節能控制 …………...205.
6.3.2.1 軌跡規劃……….……205
6.3.2.2 無解耦合控制整合軌跡控制與負載感測控制…………...206
6.3.2.3 解耦合控制整合軌跡控制與負載感測控制…………...210
6.3.2.4 整合軌跡控制與定供油壓力控制…………...217
6.3.3 軌跡控制於傳統無節能控制之閥控液壓系統………….....221
6.3.4 綜合比較….. ………...223
6.3.4.1 解耦合與無解耦合控制整合軌跡控制與負載感測控制比較…..223
6.3.4.2 解耦合控制整合軌跡控制與負載感測之不同壓差控制比較…..225
6.3.4.3 整合軌跡控制與不同定供油壓力控制比較…. ………...225
6.3.4.4 整合軌跡控制與三種不同節能控制系統之比較……………...…..225
6.3.5 節能效率分析….. ………...…229
6.3.6 整合多段定速控制與節能控制….. ………...……234
6.3.6.1 無解耦合控制整合速度控制與負載感測控制………….....236
6.3.6.2 解耦合控制整合多段定速控制與負載感測控制…………...239
6.3.6.2.1 一段定速控制與負載感測控制…………...240
6.3.6.2.2 二段定速控制與負載感測控制………….....245
6.3.6.2.3 三段定速控制與負載感測控制…. ………...245
6.3.6.3 整合速度控制與定供油壓力控制….. ………...247
6.3.7 速度控制於傳統無節能控制之閥控液壓系統…………...249
6.3.8 加入自組織修正器線上學習….. ………...251
6.3.9 綜合比較…………...254
6.3.9.1 解耦合與無解耦合控制整合速度控制與負載感測控制比較…..254
6.3.9.2 解耦合控制整合速度控制與負載感測之不同壓差控制比較…..256
6.3.9.3 整合速度控制與不同定供油壓力控制比較….. ………...257
6.3.9.4 整合速度控制與三種不同節能控制系統比較………….....258
6.3.10 節能效率分析….. ………...259
第七章 結論與未來展望…………....265
計畫成果自評………...274
附錄1………276
附錄2………292
附錄3………...……….312
附錄4………..…..326
第一章 緒論
1.1 研究動機
二十一世紀之環保能源問題為重要研究課題,面對逐漸減少之能 源,如何有效節約能源?如何有效節省耗能提昇機械之效率?必然是未 來之一重要研究課題。歐美各國對此一問題,早已投入多年,然而,亞 洲各國仍舊只專注於提昇經濟,亦即,只專注於產品性能之提昇,而較 忽略能源環保等問題。因此,本研究計畫將針對如何於液壓控制系統中 減少耗能,提昇其效率進行深入研究探討。依據參考文獻顯示,此方面 之研究主要集中於歐洲,特別是德國、瑞典、英國等。[1、2、3、4、
5、6、7、8、9、10]
液壓系統是複雜與高度非線性(nonlinear)的控制系統,故如何推導 其數學模型與設計其控制器,對研究者而言是一項非常大的挑戰。液壓 系統的非線性主要是由伺服閥的流量-壓力(flow-pressure)特性與其重疊 的狀態(overlap、zerolap、underlap)、遲滯(hysteresis)的影響、節流口 (orifice)面積的開度、流體壓縮性(compressibility)、黏度(viscosity)與油溫 的變化、摩擦力的影響…等因素。另外,除了液壓系統本身的非線性現 象,其亦包含許多推導數學模型時所不確定的參數[12],此不確定參數 源自於供油泵壓力的波動,還有一些液壓參數的變動,例如:容積模數 (bulk modulus)… 等 , 且 在 進 行 實 驗 時 , 其 系 統 環 境 的 變 化 及 干 擾 (disturbance)的影響也是重要的因素。
閥控液壓系統(Hydraulic valve controlled system)主要由液壓泵、
液 壓 閥 及 作 動 器 所 組 成 , 相 較 於 泵 控 液 壓 系 統 (Hydraulic pump controlled system)其具有高響應之特性,故常被應用於伺服控制系統 中。然而,閥控液壓系統最大的缺點在於 -- 能源效率不高,主要原因 有兩個:一、在閥控液壓系統中,液壓泵將機械能轉換成液壓能,而液
壓缸將液壓能轉換成機械能,當液壓能經過液壓閥時,液壓閥之節流口
(orifice)相當於「流阻」(flow resistance),致使部份液壓能在此被消耗 而轉換為熱能,使油溫上升,此乃造成閥控液壓系統效率不高之主因。
二、在傳統閥控液壓系統中,泵之供油壓力由洩載閥(Relief valve)設 定為最大值,由泵輸出之高壓油,當流經控制閥時,僅部份液壓能由液 壓作動器(Hydraulic actuator)轉換成機械能驅動機械系統,而多餘之液壓 能在此轉換成熱能或由洩載閥流回油箱中,此亦為造成閥控液壓系統效 率不高之另一主因。為改善此耗能之缺點[13],於是有節能控制(Energy- saving control):如「負載感測系統」(Load-Sensing System)的觀念產 生。
隨著微電子技術之日新月異,控制器(Controller)及感測器(Sensor)的 價格迅速降低,使得其應用將更普遍,故如何應用微電子控制技術提昇 液壓控制系統之性能,來有效整合伺服控制(Servo control)與節能控制 (Energy-saving control)將是未來必然之趨勢。
負載感測系統應用於電液閥控伺服控制系統之研究,仍有許多問題 待克服。本研究之整合控制系統,包含:閥控液壓缸系統之伺服控制與 負載感測系統之節能控制,故為二進二出(Two-input Two-output,TITO) 之複雜控制系統,且其閥控液壓缸系統之伺服控制與電液負載感測系統 之供油壓力控制二者間會相互耦合影響,亦即負載感測系統之供油壓力 大小會影響伺服控制性能,而伺服控制之比例控制閥閥口開度大小亦會 影響負載感測系統之供油壓力控制[14][15][16]。
另外,由於閥控液壓缸系統之軌跡控制、速度控制及力控制,其比 例控制閥之閥口維持常開狀態,將可與電液負載感測系統之供油壓力控 制進行整合控制;而閥控液壓缸系統之位置控制則不適合,主因在於當 液壓缸到達所控制位置時,比例控制閥之閥口趨近關閉狀態,使得供油 壓力升高至釋壓閥所設定之系統最高壓力,並維持此最高供油壓力,使 得電液負載感測系統之供油壓力控制無法作用。
而液壓系統本身具有阻尼低,不易控制之特性,故必須應用現代控 制理論方有較佳的控制效果,例如 Variable Structure Control、Fuzzy Control…等,發展更具智慧型及強健性之控制器。考慮系統耦合的效 應,所以本文控制器選擇不需系統數學模式的模糊滑動模式控制理論 (Fuzzy sliding mode control),並創新改良發展解耦合自組織模糊滑動模 式控制器(Decoupling self-organizing fuzzy sliding mode control),在 PC- Based 控制系統架構上,整合閥控液壓缸系統的伺服控制與負載感測系 統的節能控制。
1.2 電液負載感測系統
負載感測系統(Load-sensing system)特別對大輸出功率之閥控液壓系 統之能源節省方面有顯著之改善,已被應用於車輛液壓系統(Mobile hydraulic system),諸如:液壓挖掘機(Hydraulic excavator)、營建機械、
射出成型機(Injection molding machine)等。其共同特性為大系統高功 率,故系統質量大,其系統固有頻率較低,響應較慢,而其輸出功率 大,故負載感測控制之節能效果較明顯。
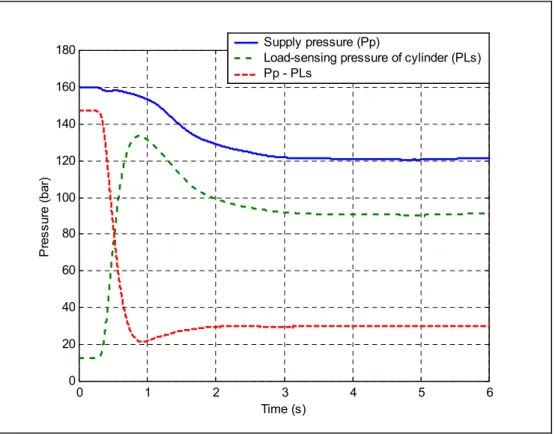
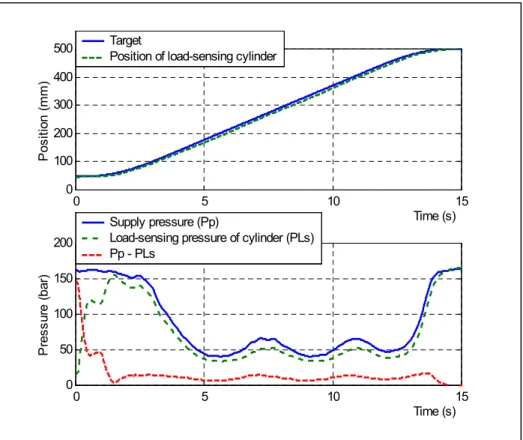
負載感測控制(Load-sensing control)原理,乃是藉由控制變量泵(斜 盤式軸向柱塞泵)之斜盤角度或電動馬達的轉速,來調節泵之供油壓力 (PS),使其能隨實際負載所需之壓力而調節,即當液壓缸遇高負載時,
液 壓缸室 高壓油流 入側之 壓力稱為 負載感 測壓力(PLS , Load-sensing pressure)其需較高之壓力,泵之供油壓力(PS , supply pressure)提高;而當 液壓缸之負載減小時,PLS 降低,柱塞泵能立即調節降低輸出壓力 PS, 主要目的是要使泵之輸出壓力 PS與液壓缸之負載感測壓 PLS之差保持為 定值(∆P=PS -PLS=const)。負載感測控制(load-sensing control)改善傳統閥 控液壓系統之耗能問題,不僅可節省能源,同時,因能源浪費於油溫升 高之問題獲得改善,故一方面可減小液壓油箱(tank)之大小,另一方 面,由於油溫上升緩慢,所以可減小液壓油冷卻器(cooler)之大小及重 量,甚至可免用液壓油冷卻器[1],對移動式液壓機械(如:飛機、車輛)
更具意義。
圖 1.2.1 所示為機械液壓式負載感測系統(Mechanical-hydraulic load-sensing system),負載感測泵(load-sensing pump)係由斜盤式軸向 塞泵(swash-plate axial piston pump)、液壓缸與二個 2/3 閥(1)(2)所 組成,閥(1)使泵之供油壓力( )與負載感測壓力( )之差保持定
值( ),而閥(2)之功能乃是當泵達到最大供油壓力
時,使泵之斜盤角度能變小。方向閥(3)為負載感測閥(load-sensing valve)控制工作缸運動方向,閥(4)只有在多負載缸之系統中才使 用。此機械液壓式負載感測系統響應較慢,當負載感測壓力( )變動 時,供油壓力( )無法立即調節,即兩者間有較大之時間延遲(time delay),會影響負載感測缸之動態響應,故常使操作者感覺到泵之供油 壓力( )不足,使負載感測缸響應較慢或出力不足。
pS pLS
const p
p
p= S − LS =
∆
pS
pS
pLS
由於微電子技術於近年來迅速發展,使得壓力感測器(pressure sensor)、控制器(controller)等之價格降低,因而發展電液負載感測系 統(Electro-hydraulic load-sensing system, E.L.S),如圖 1.2.2 與圖 1.2.3 所示。
圖 1.2.2 負載感測泵(load-sensing pump)之閥(7)為比例電磁 閥,而閥(8)(load-sensing valve)亦為一比例電磁閥;圖 1.2.3 負載感 測泵(load-sensing pump)轉速由變頻器(1)與 AC 電動馬達(2)所組 成,最後泵之供油壓力( )與負載感測缸(load-sensing cylinder)之負 載感測壓力( )由壓力感測器(pressure sensor)測得,回授至控制器,
進行閉迴路之壓差控制(pressure difference control),使得壓差維持定值
( ),同時,電液式負載感測系統較機械液壓式負載
感測系統具有較快之響應,泵之供油壓力( )能夠快速隨負載感測壓 力( )調節,故負載感測缸具有較佳之動態響應,可同時進行負載感測 缸之閉迴路伺服控制,如:軌跡、速度、力控制等。可同時使「負載感 測控制」(load-sensing control)之節能控制與提高系統性能之伺服控制
(軌跡、速度、力控制等),同時並存兼顧[8]。
pS
pLS
pLS = const p
p= S −
∆
pLS
pS
Load_sensing Cylinder
Load_sensing Pump Load_sensing
Valve PLS
PS M
µC
PLS 8
PS 6
7 M
1 2
3
4
5
圖1.2.1:機械液壓式負載感測系統 圖 1.2.2:定轉速變排量式 電液負載感測系統
M
f nf Frequency Converter
µC
1
2 3
4 5
Load_sensing Cylinder
AC Motor Load_sensing
Valve PLS
PS
圖 1.2.3:變轉速定排量泵式電液負載感測系統
1.3 文獻回顧
1.3.1 電液負載感測系統
有關電液負載感測系統之研究,近幾年來陸續發表。Zaehe(1993 年) 研究電液負載感測系統應用於閥控液壓馬達之轉速控制[1],此研究首先 嘗試將電液負載感測系統與負載馬達之轉速控制同時實現,控制器之設 計皆採用傳統 PID 控制。Esders(1995 年)研究電液負載感測系統應用於 多負載系統(multi-load system),研究重點在於多負載缸系統,負載感測 壓力( )必須為各負載感測缸中負載壓力最高者,電液負載感測系統之 控制器亦只採用傳統 PID 控制[7],負載感測缸系統為開迴路控制。余冬 帝、王琮右(2000 年)分別以適應性模糊控制及 控制於電液負載感測系 統之研究[17][18],成功地將電液負載感測系統之供油壓力( ),與其負 載感測缸之負載感測壓力( )之差保持為定值(∆ )。
pLS
H∞
pS LS =
p p= pS −pLS const
1.3.2 整合控制系統
有關整合閥控液壓缸系統之軌跡控制及速度控制與電液負載感測系 統之負載感測控制研究,近年來有同門師兄李聯旺(2001 年)、簡御偉 (2001 年)、蔡金江(2002 年)等學長發表[15][14][16],但其均不考慮系統 耦合的效應,以智慧型及具強健性的控制理論,利用平行控制之分離設 計的觀念來設計控制器,但由於本實驗系統乃為 TITO 之複雜控制系 統,其系統耦合的現象非常的嚴重,故本文將針對系統耦合的部分發展 一解耦合控制器來加以解耦,以使整合控制系統具有更佳的控制性能。
1.3.3 控制理論 (一)基因演算法
基因演算法之構想乃是由美國密西根大學的 John Holland 教授於 1962 年所提出,而“遺傳算則”這個名詞最早提出的學者是 Bagley[19],
亦是他利用成對字串做為編碼的基礎。而 Hollstien[20]則將遺傳算則應 用於數學上最佳化的問題,發現此法所得到的結果較傳統的搜尋方法來 的得迅速。1975 年 De Jong [21]結合了 John Holland 的 schema 定理及自 行 研 究 所 得 之 結 論 , 確 定 了 遺 傳 算 則 之 收 斂 性 。1986 年 John J.
Grefenstette[22] 所 發 表 的 論 文 “Optimization of Control Parameters for Genetic Algorithms”介紹了如何設定基因演算中各個參數之值。基因演算 法應用於控制的相關研究有Yang,C. D. , Ju, H. S., and Liu, S. W.,[23],
其將基因演算法應用於 控制中針對飛行控制目標進行權重函數的設 計,此法可大大的減低 控制在權重函數選取上的困難。
H∞
H∞
(二) H∞控制理論
H∞控制理論早在 80 年代初期就由 Zames 所提出,當初是為了消除 外界干擾,因此提出最小化 S ∞的觀念。稍後 Zames 與 Francis 在著作 中,他們針對 SISO 的系統,提出利用 ” Nevanlinna-Pick 內插理論 (interpolation theory)” 來解決 WS ∞的問題。而在多變數的 控制問題 中,則相繼 Doyle、Chang and Peason、 Francis、Helton and Zames 及 Safonov and Verma …等人提出。在 1984 年 Doyle 及 Glover 兩人提出 控 制 器 的 狀 態 空 間 解 , 一 般 我 們 稱 這 種 方 法 為“ GD 理 論 (GD theorem)”。使用 GD 理論所得到的控制器,其階數不比擴增受控模式 (augmented plant)的階數高,而且整個設計程序也較簡單,因此較為一般 人所接受。 控制近年來在強健控制(Robust Control)的領域中佔舉足輕
H∞
H∞
H∞
重的地位,它對未知干擾(Disturbance)及非結構性不確定性(Unstructured Uncertainty)的容忍能力及易於實現的特性使 控制越來越受歡迎。無 論飛機之飛行控制、人造衛星之姿態控制、飛彈之導引控制到工業上的 機械手臂、伺服馬達系統、液壓伺服系統等均大幅採用 控制器。
[24][25][26]
H∞
H∞
(三)適應性強健控制(Adaptive Robust Control,ARC)
近二十年來,對於未知非線性系統的控制問題,已有不錯的成就。
驅使我們去做深入的研究與探討的動力,是因實際的物理系統在模型 (model)上總有些未知項未知參數,難以去估測確定的。這些未知項大概 可分為兩類:(i)重複性或固定不變未知的性質即未知的物理常數(如:系 統的慣量),(ii)無重複的未知性質即外部干擾和模型上的不精確項。處 理這些問題,有兩個非線性控制理論已有廣泛的探討與驗證:在未知參 數 方 面 有 適 應 性 控 制[27,28] , 和 包 含 兩 者 的 決 定 性 強 健 控 制 (Deterministic Robust Control)[29,30,31,32]。近來,在非線性適應控制方 面有強健性適應控制(Robust Adaptive Control)[33,34,35,36,37],亦採用適 應性背向步進控制[27]而有不錯的成效。文獻[38,39,40]提出適應性強健 控制(ARC),為設計高性能的強健控制器提供一新的方法。實際上,這 個方法是由決定性強健控制(DRC)與適應性控制(Adaptive Control)所組合 而成。此法亦使用[27]適應性背向步進為設計基礎,並加入不連續投影 函數作為參數調適(Parameter Adaptation),在文獻[40]提出一般的公式架 構。而本文將嘗試此法,採用分散式控制法,設計電液負載感測系統與 閥控液壓缸系統兩者的控制器並整合之。在液壓系統控制的應用上有文 獻[41,42,43]。
(四)模糊滑動平面控制(FSMC)
自 1965 年 Zadeh[44]教授提出模糊集合論的見解後,在 1974 年英 國倫敦大學 E.H. Mamdani[45]教授成功的將 Fuzzy 理論應用於控制上,
1988 年後,日本人更將 Fuzzy 理論有效應用於消費性家電後,Fuzzy 已 然成為家喻戶曉的名詞。所謂模糊控制即仿效人類的思考方式,類似於 人類經驗法則,以 if-then 的形式,表達具模糊性思考決策過程,不需數 學模型的控制理論,然而模糊理論發展至今,在應用於上仍有相當多的 缺點,最常見的問題如下:(1)專家經驗不足:由於模糊控制系統是一種 結合操作人員直覺及經驗的專家型控制器,不需數學模型,在設計過程 中仍以反覆試誤居多,沒有一定的系統方法可循,若專家經驗不足將導 致不可預知的後果。(2)資料庫龐大:若欲使用模糊控制器於一個高控制 精度的系統,往往需要強大的資料庫,而實際硬體裝置中記憶體的大小 會使資料庫有所限制。
由於上述的缺點,學者致力於解決專家經驗不足的問題,於是具有 自我學習的智慧型控制器興起,Procyk 與 Mamdani[46]提出具學習能力 的自組織控制器(Self-organizing fuzzy controller)。後來相繼有 Shao[47]
及Zhang[48]提出修正。
而在規則庫的設計上,為了簡化過於複雜的模糊規則庫問題,以模 糊滑動平面S 取代傳統以誤差 及誤差微分 為輸入規則的模糊控制,如 文獻[49][50][51]。
e e&
本文結合自組織模糊控制、滑動平面控制、模糊控制及解耦合控制 創新發展出解耦合自組織模糊滑動平面控制(Decoupling self-organizing fuzzy sliding mode control),大幅簡化模糊規則庫,並應用自組織控制理 論對模糊滑動平面規則庫進行線上即時修正,來提升智慧型控制器的性 能,以分離控制解耦合(Decoupling)控制架構,加上自組織模糊滑動平面 控制器來解耦複雜的TITO 控制系統,期能解決系統間的耦合效應。
1.4 研究目的與本文架構
傳統閥控液壓系統由釋壓閥及定排量泵設定最大供油壓力,造成能 源效率不佳。本文結合閥控液壓缸系統與電液負載感測系統(ELS),發 展創新整合控制系統,同時結合伺服控制(軌跡、速度與力量控制)與節 能控制,實現高伺服控制性能及高能源效率。分別設計三種不同整合控 制系統,包含:整合伺服控制與負載感測控制系統、整合伺服控制與定 供油壓力控制系統、以及伺服控制於無節能控制之傳統閥控液壓系統,
比較其伺服控制及節能控制性能之優劣,並以實驗驗證整合控制系統之 可行性。
整合控制系統為二輸入二輸出(TITO)之複雜控制系統,包含:閥控 液壓缸系統與電液負載感測系統(ELS),此兩個子系統會相互耦合影 響,所以在控制策略上利用分離控制的解耦合(Decoupling)控制概念,而 控制器設計則採用模糊滑動模式控制(FSMC),來解耦複雜的 TITO 控制 系統,並簡化多進-多出系統之模糊規則庫設計且確保模糊控制系統之穩 定 性 。 另 外 , 為 了 配 合 系 統 之 變 動 , 在 控 制 器 中 加 入 自 組 織(Self- organizing)修正器,對模糊規則庫作線上即時修正,使模糊規則更能適 合實際的需要。
最後,本文旨在以解耦合控制整合電液負載感測系統之節能控制(包 含:負載感測控制及定供油壓力控制)與閥控液壓缸系統之伺服運動控制 (包含:軌跡控制、速度控制及力控制)的整合控制研究,當液壓缸在進 行伺服運動控制(如:軌跡控制、速度控制與力控制)時,同時進行節 能控制以達成節省能量的效果。並創新發展解耦合自組織模糊滑動平面 控制,在 PC-Based 控制系統架構下,發展具有智慧型與強健性之控制 器,同時實現高伺服響應及高能源效率之目標。
本計劃區分三年:
第一年(NSC89-2212-E-011-051):以定轉速變排量泵實現電液負載感測 系統之節能控制
以實現電液負載感測系統為目標,結合傳統及現代控制理論(如
Fuzzy,Robust control 等),實現負載感測控制,使泵之供給壓力與負 載缸所需之工作壓力之差保持為定值(∆p=constant)。
第二年(NSC90-2212-E-011-054):整合伺服控制(servo control)與節 能控制(energy-saving control) 即節能控制系統結合閥控液壓缸系統伺服控制之研究。以閥控系統而 言,泵供油壓力較高時,系統會有較佳之動態響應,對工作缸性能提 升,控制精度較佳。故當電液負載感測系統調節控制泵之供油壓力時,
對工作缸之動態響應會有所影響,如何使系統兼具高響應之伺服控制與 節能控制之特性,為第二年(90 年度)研究所欲深入探討之重點。
由第一年之研究得知,閥控液壓缸系統之伺服控制將會影響電液負載感 測系統之供油壓力控制,閥控液壓缸系統之軌跡控制、速度控制及力控 制,其比例控制閥之閥口維持常開狀態,將可與電液負載感測系統之供 油壓力控制進行整合控制﹔而閥控液壓缸系統之位置控制則不適合,主 因在於當液壓缸到達所控制位置時,比例控制閥之閥口趨近關閉狀態,
使得供油壓力升高至釋壓閥所設定之系統最高壓力,並維持此最高供油 壓力,使得電液負載感測系統之供油壓力控制無法作用。故將針對閥控 液壓缸系統之軌跡控制及速度控制與電液負載感測系統之供油壓力控制 進行整合控制研究。此控制系統為 2 進 2 出之 MIMO 控制系統,且二系 統互相耦合影響,供油壓力大小影響伺服控制,而伺服控制之比例控制 閥閥口開關亦影響負載感測系統之供油壓力控制。故本文將嘗試應用現 代控制理論 Fuzzy 及 Robust Control 發展 MIMO 控制系統之控制器。
第三年(NSC91-2212-E-011-018):以變轉速定排量泵進行節能控制結合 伺服控制
以變頻器改變 AC 馬達之轉速,控制定排量泵之輸出流量及供油壓力,
結合第二部分所發展之閥控液壓缸系統之伺服控制,比較變轉速定排量
度)之研究重點。將原實驗系統加裝一變頻器,改變 AC 馬達之轉速,
控制定排量泵之輸出流量及供油壓力,此系統適用於室內以電動機驅動 之閥控液壓系統,如射出成型機等,除結合第二年所發展之閥控液壓缸 系統之軌跡及速度控制,將針對射出成型機所應用之力控制結合供油壓 力控制進行研究,應用現代控制理論 Fuzzy 及 Robust Control 發展 MIMO 控制系統之控制器,並比較變轉速定排量泵系統與定轉速變排量泵 系統對相同之伺服控制之影響,此為第三年(91 年度)之研究重點。
本研究成果報告內容共分七章,其安排架構如下:第一章為緒論,
說明研究動機、整合控制系統、文獻回顧與本文架構。第二章介紹實驗 機台設備與元件規格。第三章介紹整合控制系統之數學模型建立。第四 章控制理論,包含 4.1 節:基因演算法與H∞控制理論,4.2 節:適應性 強健控制理論,4.3 節:解耦合自組織模糊滑動模式控制理論,有:模 糊控制、滑動模式控制、模糊滑動模式控制、自組織控制法則及解耦合 控制架構。第五章控制器設計,包含:5.1 節:基因演算法與H∞控制之 控制器設計,5.2 節:適應性強健控制之控制器設計,5.3 節:解耦合自 組織模糊滑動模式之控制器設計。第六章實驗結果與討論,包含:6.1 節:基因演算法與H∞控制整合節能控制與伺服控制,6.2 節:適應性強 健控制整合節能控制與伺服控制,6.3 節:解耦合自組織模糊滑動模式 控制整合節能控制與伺服控制。最後,第七章結論與未來展望。
第二章 實驗機台架構與建立
本研究之閥控液壓缸伺服控制系統與節能控制系統為工業上實際應 用之複雜控制系統,故本研究將整合此兩系統,以實現其節能控制與伺 服控制於電液系統為目的,所以本章將對此實驗機台與設備作一詳細之 介紹,包括實驗機台的設計與建立、組成的元件與規格。
2.1 整合控制系統設計與建構
電液伺服控制系統之實驗機台如圖 2.1.1 所示,主要由兩個伺服控 制系統所組成:節能控制系統(Energy-saving control system)及閥控液壓 缸系統(Hydraulic valve-controlled cylinder system)。本研究主要目的,在 整合閥控液壓缸系統的伺服控制(軌跡控制、速度控制及力控制)與節能 控制系統的節能控制(負載感測控制及定供油壓力控制)。故從下一節起 將 介 紹 以 上 所 述 之 實 驗 系 統 , 而 其 元 件 之 數 學 模 型 則 在 參 考 文 獻 [13][15][16]中有詳細之推導與說明。
AD AD AD AD AD
Load-sensing Cylinder
Mass Load Cell
P1 P2
PS
Load-sensing Valve Linear Scale
decoder DIo
D
DA A
DA
M Disturbance Cylinder
Relief Valve Relief Valve
M
f M
nf
DA DA
DA
DA LVDT
Relief Valve
Frequency Converter
Pilot Pump Load-sensing
Pump
Servo Valve n
Hydraulic Electronic
2.2 節能控制系統
節能控制系統主要由變頻器、三相交流感應電動馬達、可變排量柱 塞泵、斜盤調節機構、洩載閥、導引(Pilot)動力單元…等組成,如圖 2.2.1(迴路圖)、圖 2.2.2(實體圖)所示,其詳細元件規格如表 2.2.1 所示。
其中,變頻器與三相交流感應電動馬達可改變泵轉速 n;可變排量柱塞 泵由 9 根柱塞、斜盤、液壓缸…等組成,如圖 2.2.1 所示,規格如表 2.2.2 所示。故本研究架構可採用定轉速變排量及變轉速定排量之節能控 制方式。其節能原理為:當閥控液壓缸系統進行伺服運動時,其液壓缸 壓力會隨負載變動,故將此壓力回授至控制器,藉由控制閥控液壓缸來 調節負載感測泵之斜盤角度或馬達轉速,以改變系統的供油壓力,而達 成節省能量的目的。
Pp
M
f nf
Frequency Converter
n i
圖 2.2.1:節能控制系統(迴路圖)
圖 2.2.2:節能控制系統(實體圖)
x
P0
PT
Q1 y
y0
Q2 Q3 Q4
QA QB
PB
PA
AkA AkB swash plate
of pump
swash plate axial piston pump
圖 2.2.3:變排量柱塞泵
表2.2.1:電液負載感測系統主要元件表
元件名稱 規格
變頻器
寧茂 RM5-2060 控制方式:正弦 PWM 方式 頻率控制範圍:0.1~400.00Hz 頻率設定信號:DC 0~10V
電動馬達
大同三相感應電動馬達 輸入電壓:220 V
輸出功率:60 hp 轉速:1760 rpm 負載感測泵
(可變排量柱塞泵)
OILGEAR 可變排量柱塞泵 最大壓力:400 bar
額定流量:160.5 l/min 最大轉速:2400 rpm
導壓動力單元
(a)電動馬達
(1)大同三相感應電動馬達 (2)輸出功率:2 hp
(3)轉速:1420 rpm (b)定流量泵浦
(1)額定轉速:1730 rpm (2)額定流量:130 l/min
負載感測伺服機構
(a)放大器
(1)OILGEAR Integral Amplifier (2)電源輸入:±15 V
(3)信號輸入:0 V ~ 10 V (b)伺服閥
(1)OILGEAR Servo Valve (c)LVDT
(1)OILGEAR LVDT (2)行程:±1.27 cm
釋壓閥
Atos Proportional pressure relief valves
最大壓力:210 bar 最大流量:200 l/min 輸入訊號:0-10 V
表2.2.2:可變排量柱塞泵規格表 OILGEAR 可變排量柱塞泵 型號:PVG-100-C2UV-RSFY-VA25-SANN
柱塞:9 根
最大排量:98.3 ml/rev 最大壓力:400 bar
額定流量(@1800 rpm):160.5 l/min 最大轉速:2400 rpm
最大斜盤角度(swashblock angle):21.5o 最大控制桿衝程:1.905 cm
2.3 閥控液壓缸系統
閥控液壓缸系統是由負載感測閥(Load-sensing valve)、負載感測缸
(Load-sensing cylinder)、光學尺(Linear scale)、壓力感測器(Pressure sensor)、力感測器(Load cell)及負載感測泵(Load-sensing pump)所構成,
如圖 2.3.1(迴路圖)、圖 2.3.2(實體圖)所示,其詳細之元件規格如表 2.2.3 所示。伺服控制原理為:以光學尺、壓力感測器與力感測器分別將量測 訊號位置、壓力與力量回授至伺服控制器,藉由控制器控制負載感測閥 閥口大小,控制負載感測缸之運動,達到所需求的控制目標。
xC
Pp
PT
Q1 y
y0
Q2 Q3 Q4
QA QB
PC,B
PC,A
AC,A AC,B
MC
CC
DC
Fd
Load-Sensing Cylinder
Load-Sensing Valve
Extenal disturbance froce
Load-Sensing Pump Load-Sensing
Pressure
圖2.3.1:閥控液壓缸系統(迴路圖)
圖2.3.2:閥控液壓缸系統(實體圖) 表 2.3.1:閥控液壓缸伺服控制系統元件表
元件名稱 規格
負載感測閥(比例式伺服閥)
Atos Proportional Directional valves 最大壓力:315 bar
額定流量:200 l/min
負載感測缸(單桿液壓缸)
JUFAN Cylinder 直徑:100/65 mm 行程:500 mm 最大壓力:210 bar
感測器
(a)壓力感測器 (1)輸入:24 V
(2)輸出:0 ~ 400 bar,0 ~ 10 V (b)Load Cell
(1)輸入:30 mV (2)輸出:0~5 VDC
(3)量測極限:30000 LBS (c)光學尺
(1) 行程:520 mm
(2) 解碼電路:HCTL-2020 (3) 解析度:1µm
2.4 干擾缸系統
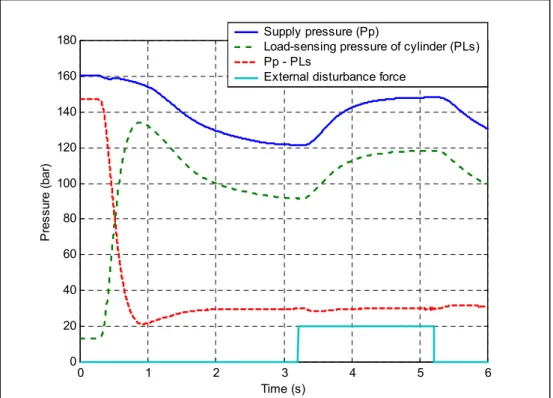
干擾缸系統係由液壓缸、釋壓閥、齒輪泵、電動馬達、導壓型提動 閥組成,如圖 2.4.1(實體圖)、圖 2.4.1(迴路圖)所示,其詳細之元件規格 如表 2.2.4,其主要功能在於模擬負載的外界干擾,藉由二個釋壓閥 (relief valve) 設定干擾缸二缸室(cylinder chamber)內之壓力,使產生一個 外加的干擾力量。
M Disturbance Cylinder
Relief Valve Relief Valve
圖2.4.1:干擾缸系統(實體圖) 圖 2.4.2:干擾缸系統(迴路圖) 表 2.4.1:干擾負載系統元件表
元件名稱 規格
電動馬達
大同三相感應電動馬達 輸入電壓:220 V
輸出功率:2 hp 轉速:1720 rpm
釋壓閥
Hydra Force Proportional Electric Relief Valve 電源輸入:24 V
最大壓力:207 bar 信號輸入:0 ~ 10 V
干擾缸(單桿液壓缸)
JUFAN Cylinder 直徑:100/65 mm
行程:500 mm 最大壓力:210 bar
2.5 PC-based 控制系統
本研究之控制系統硬體,主要由 PC- Based 控制器所組成,即由個 人電腦(PC)、AD/DA 介面卡及控制軟體所組成。於 DOS 環境下,以 C 語言撰寫並搭配研華 AD/DA 介面卡。其詳細之元件規格,如表 2.2.5 所 示。
表2.5.1:PC-based 控制系統元件表
元件名稱 規格
PC-based 控制器 AMD K6-2 450 CPU RAM:64MB
介面卡
研華 AD/DA 卡 (a)PCL-812
(1)16 channel A/D (12bit) (2)2 channel D/A (12bit) (3)16 channel DI/O (b)PCL-726
(1)6 channel D/A (12bit) (2)16 channel DI/O 控制軟體 (1)Turbo C++ Ver. 3.0
第三章 整合控制系統之數學模型建立
3.1 系統線性數學模型的建立[52,54]
參考2.1 節之實驗機台,整合系統之數學模型主要由兩系統所 組成:電液負載感測系統及閥控液壓缸系統,其中兩系統之非線性 數學模型可參考文獻[53]的推導。為控制器設計之需,我們必須推導 系統之線性模型,並進行系統參數鑑定實驗,以獲得線性系統數學 模型之參數值;因此文獻[53]中所推導之非線性數學模型需予以簡化 及線性化。以下我們將逐一討論整合系統中各個元件之數學模式。
(a) 伺服放大器
伺服放大器的主要目的是將輸入電壓成比例的轉換為電流,以 驅動伺服閥,其數學模式可以下式表示:
I=K ua (3.1.1) 此處
(b) 電液伺服閥 閥之流量方 程式由節流口方程式(orifice equation)得[34]:
I :伺服放大器之輸出電 流
Ka :伺服放大器之增益
u :伺服放大器之輸入電 壓
( )
αD d y Pρ−PL
⋅
⋅
⋅ Π
⋅
= 2 0
Q
(3.1.2)
此處
Q :輸出流量
αD d
:閥口流量係數(discharge coefficient)
:閥軸直徑
:閥軸位移
P0 :供油壓力
PL :負載壓力
ρ :液壓油密度
由於(5-2)式為非線性函式,且在設計控制器時需要一線性數學
模式,因此我們將(5-2)式對操作點作線性化,可得下列方程
式:
∆Q k y K P= q∆ − c∆ L (3.1.3)
此處 ( )
α ρ
∂
∂ L
D y y q
P d P
y
k Q − ′
⋅ Π
⋅
=
= = ′ 2 0 :閥之流量增益
ρ α
∂
∂
− ′
⋅
⋅ Π
= ⋅
−
= = ′
L D
P P L c
P P
y d P
Q
L L
2 0
2
k :閥之流量-壓力係
數
PL' y'
:操作點之負載壓力
:操作點之閥軸位移
電液伺服閥是個非常精密且複雜之元件,它的動態特性須由高 階之非線性微分方程式才能清楚的描述;然而在實際應用時,
通常需將它降階簡化。根據伺服閥的頻寬與液壓缸及負載的液 壓固有頻率(hydraulic natural frequency)之相對大小,此元件 可以近似為零階、一階或二階元件[55]。若電液伺服閥之動態 特性以二階元件描述,則其閥軸位移與輸入電流之關係式為:
(3.1.4)
i V
y y
D
y&&+2⋅ v ⋅ωv⋅ & +ωv2⋅ = v⋅ωv2 ⋅
其中
y :伺服閥之閥軸位移