行政院國家科學委員會專題研究計畫 成果報告
均質進氣壓燃引擎多次循環估測與控制之實現(二) 研究成果報告(精簡版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 99-2628-E-011-008-
執 行 期 間 : 99 年 08 月 01 日至 100 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學機械工程系
計 畫 主 持 人 : 姜嘉瑞
計畫參與人員: 碩士班研究生-兼任助理人員:林建鴻 碩士班研究生-兼任助理人員:鄭文欽 博士班研究生-兼任助理人員:楊景龍 博士班研究生-兼任助理人員:周志正
報 告 附 件 : 出席國際會議研究心得報告及發表論文
公 開 資 訊 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢
中 華 民 國 100 年 11 月 18 日
中 文 摘 要 : 均質進氣壓燃引擎是經濟、高效率且低汙染的新式引擎。可 以說是擁有著柴油引擎及汽油引擎之優點,均質進氣壓燃引 擎有著如柴油引擎般的高效率及遠較於汽油引擎來得更低的 有害氣體 NOx 排放。均質進氣壓燃引擎是利用混合均勻的油 氣進到燃燒室,透過汽缸內壓力的上升使內部的油氣自燃,
來推動引擎。由於均質進氣壓燃引擎是透過油氣得自燃來點 燃燃油,因此無法一般像汽油引擎及柴油引擎直接透過火星 塞點火及噴由時間來控制其點火時間。因此本研究先利用 MATLAB -Simulink 建立出引擎模型以分析引擎內部燃燒狀 況,並搭配 MotoTron 系統擷取車上感測器上之訊號,調整模 型中的參數,使模型更接近真實引擎。實驗部分主要是以四 行程 150 c.c.機車噴射引擎來做實驗,透過 MotoTron 引擎 開發系統擷取訊號及控制,包含進排氣濕度、壓力、 溫度量 測,並控制節流閥及三通閥改變其開度,以觀察開度改變對 冷熱空氣及總進氣量之影響。並針對適應性控制在均質進氣 壓燃引擎應用之效能做了評估。
中文關鍵詞: 均質進氣壓燃引擎、燃燒模型、適應性控制 英 文 摘 要 : Combining low cost, high efficiency and low
emissions, homogenous charge compression ignition (HCCI) has been deemed as one of the key scientific advances in internal combustion engines. HCCI engines integrate the advantages of both the spark ignition (SI) and compression ignition (CI) engines: (i) high fuel efficiency resulting from high compression ratio and rapid heat release and (ii) low NOx and low
particulate matter (PM) emissions due to low cylinder peak temperature. However, HCCI engine’s combustion timing cannot be directly actuated. In this project, a cycle-to–cycle engine model is first developed to capture the important engine characteristics such as flows, pressures, temperatures and combustion timing.
The parameters in this model are then tuned using experimental data. The experiment is conducted on a 150 c.c. four-stroke motorbike engine. The MotoTron system is used for both sensor data acquisition (humidity, pressures, temperatures, flows) and actuator control (throttle, valves, injector, ignition timings). The performance of applying
adaptive control algorithms is also evaluated in this study.
英文關鍵詞: HCCI engines, Combustion model, Adaptive control
行政院國家科學委員會補助專題研究計畫 ■成果報告
□期中進度報告
均質進氣壓燃引擎多次循環估測與控制之實現(二)
Implementation of Cycle-to-cycle Observer-based Control on an HCCI Engine (II)
計畫類別:■個別型計畫 □整合型計畫 計畫編號:NSC 99-2628-E-011-008
執行期間: 99 年 08 月 01 日至 100 年 07 月 31 日 執行機構及系所:國立臺灣科技大學機械工程系
計畫主持人:姜嘉瑞 共同主持人:
計畫參與人員:楊景龍、周志正、林建鴻、鄭文欽
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本計畫除繳交成果報告外,另須繳交以下出國心得報告:
□赴國外出差或研習心得報告
□赴大陸地區出差或研習心得報告
■出席國際學術會議心得報告
□國際合作研究計畫國外研究報告
處理方式:除列管計畫及下列情形者外,得立即公開查詢
■涉及專利或其他智慧財產權,□一年■二年後可公開查詢
行政院國家科學委員會專題研究計畫成果報告
均質進氣壓燃引擎多次循環估測與控制之實現(二)
Implementation of Cycle-to-cycle Observer-based Control on an HCCI Engine (II)
計 畫 編 號:NSC 99-2628-E-011-008
執 行 期 限 :99 年 08 月 01 日至 100 年 07 月 31 日 主 持 人:姜嘉瑞 國立台灣科技大學機械工程系 計畫參與人員:楊景龍、周志正、林建鴻、鄭文欽
中文摘要
均質進氣壓燃引擎是經濟、高效率且低 汙染的新式引擎。可以說是擁有著柴油引擎及 汽油引擎之優點,均質進氣壓燃引擎有著如柴 油引擎般的高效率及遠較於汽油引擎來得更 低的有害氣體 NOx 排放。均質進氣壓燃引擎是 利用混合均勻的油氣進到燃燒室,透過汽缸內 壓力的上升使內部的油氣自燃,來推動引擎。
由於均質進氣壓燃引擎是透過油氣得自燃來 點燃燃油,因此無法一般像汽油引擎及柴油引 擎直接透過火星塞點火及噴由時間來控制其 點火時間。因此本研究先利用 MATLAB -Simulink 建立出引擎模型以分析引擎內部 燃燒狀況,並搭配 MotoTron 系統擷取車上感 測器上之訊號,調整模型中的參數,使模型更 接近真實引擎。實驗部分主要是以四行程 150 c.c.機車噴射引擎來做實驗,透過 MotoTron 引擎開發系統擷取訊號及控制,包含進排氣濕 度、壓力、 溫度量測,並控制節流閥及三通 閥改變其開度,以觀察開度改變對冷熱空氣及 總進氣量之影響。並針對適應性控制在均質進 氣壓燃引擎應用之效能做了評估。
關鍵詞:均質進氣壓燃引擎、燃燒模型、適應 性控制
Abstract
Combining low cost, high efficiency and low emissions, homogenous charge compression ignition (HCCI) has been deemed as one of the key scientific advances in internal combustion engines. HCCI engines integrate the advantages of both the spark ignition (SI) and compression ignition (CI) engines: (i) high fuel efficiency resulting from high compression ratio and rapid heat release and (ii) low NOx and low particulate matter (PM) emissions due to low cylinder peak temperature. However, HCCI engine’s combustion timing cannot be directly actuated. In this project, a cycle-to–cycle engine model is first developed to capture the important engine characteristics such as flows, pressures, temperatures and combustion timing. The parameters in this model are then tuned using experimental data. The experiment is conducted on a 150 c.c. four-stroke motorbike engine.
The MotoTron system is used for both sensor data acquisition (humidity, pressures, temperatures, flows) and actuator control (throttle, valves, injector, ignition timings). The performance of applying adaptive control algorithms is also evaluated in this study.
Keywords : HCCI engines, Combustion model, Adaptive control
1 研究背景及目的
隨內燃機引擎的蓬勃發展, 內燃機引擎為目 前車輛工業最常使用的動力來源。 由於全球對於能 源危機與環境保護等議題的關注, 趨使車輛產業發 展更高效率、 低污染的內燃機技術。 一般來說, 影 響引擎效率與排放物的主要關鍵在於引擎的燃燒過 程。 在引擎的燃燒過程若汽缸內的燃油燃燒, 則 能夠提供較高的功率輸出與較低的汙染物排放。 然 而內燃機的燃燒行為並無法直接由外部觀察, 因此 Michael 與Harjit [1]使用熱力學第一定律來推算 燃油燃燒變化, 以汽缸壓力和汽缸體積來計算熱釋 放率, 再透過積分來得到熱釋放能, 經由能量的轉 換觀察燃燒過程變化。
在內燃機引擎中, 火花點火時間與燃油噴射時間 會影響到熱釋放的過程, 因此對點火時間和噴油時 間的控制也就相當重要。 對於火花點火引擎來說, 點火的時間決定了燃油開始燃燒的時間, 適當的點 火時間能讓引擎的發揮最大的動力。 在文獻 [2, 3, 4]中,提到一般車輛的點火時間設置,為了讓引擎不 產生爆震的情況下,通常設計的點火時間會較晚,不 能達到最佳的動力輸出。 文獻中以汽缸壓力峰值來 回授控制點火時間。 讓引擎汽缸壓力峰值發生在一 定角度內, 進而使混合氣燃燒所產生的推力有效地 作用在活塞上, 引擎的動力輸出提升與避免引擎產 生爆震。
而在柴油引擎中, 燃燒過程的開始時間與燃油 噴入汽缸的時間息息相關, 因此控制柴油引擎的 燃燒過程主要控制燃油噴射的時間與噴油量。 文 獻[5]中, 開發一即時計算燃燒熱釋放系統來控制柴 油引擎, 其中包含汽缸壓力峰值的角度、 最大汽缸 壓力上升率的角度與熱釋放百分之五十時間點的計 算。 利用這些資訊回授控制柴油引擎噴油時間點和 噴油量, 讓柴油引擎提高性能。 在燃燒熱釋放分析
中,Rakopoulos [6]發展一柴油燃燒熱釋放分析系
統, 用來分析間接式噴油渦輪增壓柴油引擎的燃燒 變化, 操作在不同引擎轉速和負載的情況下, 來分 析預燃室與主燃燒室的燃燒過程。
對於均質進氣壓燃引擎而言, 文獻 [7, 8]中有提 到關於HCCI 引擎的特徵及優點。 有別於傳統引 擎, 主要是經由提高混合氣的溫度和壓力來達到自 燃。 其優點有壓縮比高,熱效率高較省油;燃燒溫度 較低, 氮氫化合物和微物質 (particulate matter, PM) 排放比較少; 燃油使用範圍較廣, 柴油、 汽 油、 酒精、 生質柴油、 煤油等替代燃料皆可使用在 HCCI 引擎上。 在均質進氣壓燃引擎控制上, 由於 是透過燃油本身的化學反應達到自燃, 不像汽油引 擎的火花點火和柴油引擎的燃油噴射時間那樣容易 控制, 因此需要透過燃燒熱釋放來找出燃燒時間點 或是汽缸壓力峰值來控制。 文獻[9]中, 主要以模型 為基準控制器,在燃油步階變化下,利用改變廢氣再 循環(Exhaust Gas Recirculation,EGR) 和汽門 揚程(Rebreathing Lift,RBL)來控制燃燒時間點
和排氣管中混合比的變化。 文獻[10, 11]中,使用物 理模型來描述引擎的燃燒過程, 並提供以改變排氣 門的開啟和關閉以及噴油量的架構來控制引擎, 噴 油量用來控制動力輸出的大小(IMEP), 而氣門開 關則是用來控制燃燒過程時間點 (CA50), 並實際 應用在引擎上,實驗結果顯示在閉迴路的控制下,燃 燒時間點和動力輸出明顯的和期望值相近。
本實驗採用一顆150c.c. 的機車引擎, 並針對此 引擎加設了一組實驗平台,實驗平台包含加熱系統、
訊號擷取、 引擎控制系統及動力計。 本研究建立出 引擎汽缸體積模型、 溫度控制與HCCI模型,並搭 配實驗測量出的數據調整其模型的參數。 實驗數據 擷取是採用MotoTron系統,透過Mototron分析 讀取並儲存訊號, 並且可以透過此系統控制三通閥 調整冷熱進氣之比例。 本研究也評估了適應性控制 在HCCI引擎上應用之效能。
2 實驗設備
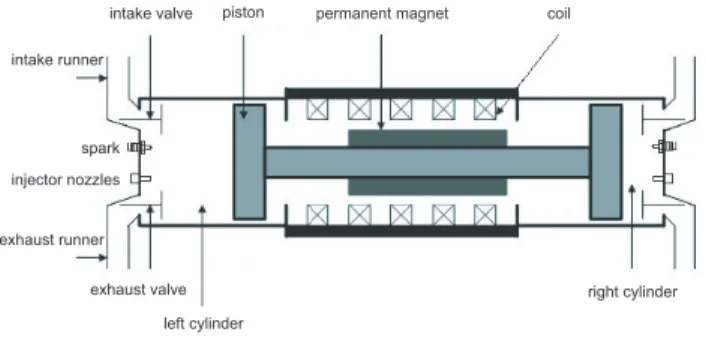
本節介紹實驗設備硬體的部份, 包含實驗引擎 以及感測器。 實驗平台架構如圖1所示,可用來進行
SI/HCCI 引擎的實驗。 空氣經由兩邊進氣導管進
去緩衝桶內, 一邊由電熱箱加熱空氣提高溫度, 一 邊則沒加熱維持原本溫度, 在經由三通閥冷熱空氣 混合調整空氣的溫度, 再從進氣管進去化油器讓空 氣和燃油混合, 經氣門打開進去汽缸內燃燒。 進氣 流量感測器裝置在進氣導管上, 進氣溫度和進氣壓 力感測器則是裝置在進氣管上, 用來量測進氣溫度 和壓力。 排氣溫度和排氣壓力裝置於排氣管上, 用 來量測排氣溫度和壓力。 汽缸壓力感測器裝置於火 星塞上, 訊號經由絕緣導線傳至電荷放大器再傳送 至電腦。 曲軸轉角感測器則是由引擎曲軸經皮帶帶 動齒輪再連接至編碼器將角度編碼。 實際引擎平台 如2所示,
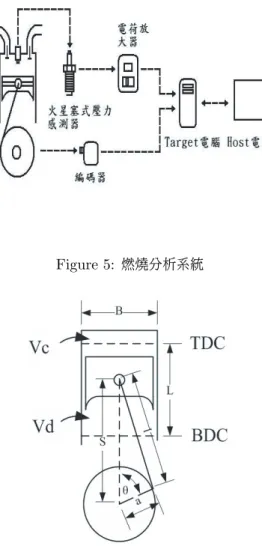
本研究採用實驗引擎為三陽悍將150 C.C. 噴射 機車引擎。 實驗主要使用 MotoTron如圖3擷取引 擎感測器訊號並改變操作環境, 在個人電腦上使用 MotoHawk 開發模組, 驅動 MotoTron ECM 之 I/O,並在電腦上透過MotoTune讀取及控制I/O 將訊號,即時地讀取進氣溫度、 進氣壓力及控制冷熱 空氣的進氣流量比例,以改變進氣溫度如圖4。 並進 而可透過實驗改變環境參數發展策略實現 HCCI。 引擎規格如表1所示。 圖5所示燃燒分析系統將引擎 汽缸壓力訊號和曲軸轉角訊號接到電腦上, 做即時 運算處理與儲存。 一般量測汽缸壓力脈波的基本實 驗設備包括 (1) 火星塞式汽缸壓力感測器 (Pres- sure Transducer) (2) 電荷放大器 (Charge Am- plifier)(3) 絕緣導線 (4) 曲軸角度編碼器 (En- coder), (5)數據擷取系統(Data Acquisition Sys- tem縮寫為DAS)。
Figure 1: 實驗平台架構圖
Figure 2: 實驗平台圖
Figure 3: 引擎控制系統
Figure 4: MotoTron系統架構圖
Table 1: 實驗引擎規格
引擎形式 三陽悍將四行程噴射機車引擎
排氣量 150 C.C.
壓縮比 11.2
缸徑 57.4 mm
行程 57.8 mm
連桿長度 93.5 mm
冷卻方式 強制氣冷 點火方式 CDI 使用燃油 92無鉛汽油 火星塞形式 NGK CR7E
3 模型組成與演算法
本節主要介紹模型中使用到的方程式、 實驗訊 號處理與演算法, 模型從引擎的幾何行為來推導得 出,參考Heywood公式[12]及模型參考文獻[13]所 建立出的引擎汽缸體積模型、 溫度控制與HCCI模 型建構。 主要透過simulink配合MotoHawk來建 構模型, 再將模型利用 Mototron來實現即時處理 與控制。
3.1 汽缸體積模型
從圖6中, 可以了解往復式引擎的幾何構 造, 並可以推導出體積方程式, 其中 B 為缸 徑 (Bore), Vc 為餘隙容積 (clearance vol- ume), Vd 為位移容積 (displaced volume) 或是 排氣量, a 為曲軸半徑, L 為衝程, l 為連桿長度 (Connecting Rod), θ 為曲軸轉角, TDC 為活塞 上死點(Top Dead Center), BDC 為活塞下死點 (Bottom Dead Center)。 汽缸體積及汽缸體積變 化率可表示如下
V = Vc+πB2
4 a(Rr+ 1− cos θ −√
R2r− sin2θ) V =˙ πB2
4 a(sin θ + sin θ cos θ(Rr2− sin2θ)−12) ˙θ (1)
Figure 5: 燃燒分析系統
Figure 6: 引擎幾何構造圖 其中Rr=al為連桿長度與曲軸柄半徑比。
3.2 混合溫度及空燃比
在本模型中進氣溫度是由冷空氣與熱空氣的 比例(β)所控制, 其比例(β)是由三通閥的開啟的角 度可得知。
Tman(k) = β(k)Thot(k) + (1− β(k))Tcold(k) (2) 其 中(Tman)為 進 氣 溫 度,(Thot)為 熱 空 氣 溫 度,(Tcold)冷空氣溫度。
由理想氣體公式可得知在進氣閥門關閉時汽缸內 的總質量。
mcyl(k) = pman(k)VIV C
RTIV C(k) (3) mres(k) = pEV C(k− 1)VEV C
RTEV C(k− 1) (4)
其中(mcyl)為由進氣歧管所填充的新鮮氣體與上 個循環所殘留在汽缸內氣體(mres)的總和,pman為 進氣歧管壓力, VIV C為進氣閥門關閉時汽缸內 的體積,R為理想氣體常數,TIV C為進氣閥門關閉 時汽缸內的溫度, pEV C為排氣閥門關閉時汽缸 內的壓力,VEV C為排氣閥門關閉時汽缸內的體積, TEV C為排氣閥門關閉時汽缸內的溫度。
在進氣閥門關閉時, 汽缸內的溫度是由進氣溫 度(Tman)與上一個循環殘留於汽缸氣體溫度所影 響。
TIV C(k) = mcyl(k)− mres(k)
mcyl(k) Tman(k) +mres(k)
mcyl(k)TEV C(k− 1) (5)
本模型中將空燃比分別定義為汽缸內的空燃比 ((AF Rcyl)) 及進氣歧管的空燃比 ((AF Rman)), 其進氣歧管的空燃比((AF Rman))。
AF Rcyl(k) = (1− xcyl)(1 + AF Rman(k)) mcyl(k)
mcyl(k)− mres(k)− 1 (6) 本文中假設變數(my,i)為在位置(y)所含惰性氣體 (N2,CO2,H2O)的質量, 其惰性氣體分式為(xy= my,i/my)。
xcyl= xEV C(k− 1)mres(k)
mcyl(k) (7)
3.3 燃燒模型
此模型主要分為四大部分討論: 分別為(1)進 氣閥門關閉時間點至開始燃燒時間點(2)開始燃燒 時間點至燃燒(50%)時間點 (3) 燃燒(50%)時間點 至排氣閥門開啟時間點(4)排氣閥門開啟時間點至 排氣閥門關閉時間點。
(1) 從進氣閥門關閉時間點至開始燃燒時間點, 汽缸內的氣體經過壓縮行程, 其汽缸溫度(Tcyl)與 汽缸壓力(pcyl)定義如下:
Tcyl(k, θ) = TIV C(k)(V (θIV C)
V (θ) )nc−1 (8)
pcyl(k, θ) = pIV C(k)(V (θIV C)
V (θ) )nc (9) 其中多變指數((nc))定義為常數。
(2) 從開始燃燒時間點至燃燒(50%)時間點: 在 均質進氣壓燃(HCCI)引擎中,爆炸的發生是在當 汽缸內的油氣混合物在進氣閥門關閉時壓縮到臨界
點時產生自燃。 由阿瑞尼亞斯(Arrhenius)積分可 求得開始燃燒(θsoc)的時間點:
∫ θsoc
θivc
Apnc exp (−Ea RTc
)dθ = 1 (10)
方程式變數定義: 汽缸壓力(pc)、 溫度(Tc)、 在 壓縮期間A=常數、 活化能(Ea)與壓力的反應靈敏 度(n)。 燃燒時間點(θsoc)的求得是以阿瑞尼亞斯
(Arrhenius) 積分積分至設定值時計算而出, 在本
模型中, 設定值為1。 在此定義燃燒過程((∆θ))為 燃油已經燃燒1%至50%,而燃燒時的熱量則假設在 燃油燃燒50%時瞬間釋放,可以定義以下各式:
θCA50= θSOC+ ∆θ (11)
TCA50= Tbc+ ∆T (12)
∆T (k) = ηcQLHV
cv
1− xcyl(k)
1 + AF Rcyl(k) (13) 其中燃燒效率(ηc)為常數,QLHV為低熱值,cv為等 容比熱。
(3) 從燃燒50%時間點至排氣閥門開啟時間點, 汽缸內的氣體經過擴張行程,其汽缸溫度(TEV O)與 汽缸壓力(pEV O)定義如下:
TEV O(k) = TCA50(k)(V (θCA50)
V (θEV O))ne−1 (14)
pEV O(k) = pCA50(k)(V (θCA50)
V (θEV O))ne (15) (4)從排氣閥門開啟時間點至排氣閥門關閉時間點, 離開汽缸的廢氣溫度則可以以下式表是
TEV C(k) = TEV O(k)(pEV C(k)
pEV O(k))ne−1ne (16)
4 引擎控制功能
4.1 點火正時之控制
本實驗使用之引擎控制系統MotoTron,可透 過 MotoHawk 開發模組, 驅動 MotoTron ECM 之點火訊號類的 I/O, 並將設定好之 I/O 腳位與
CDI 做連結, 利用 MotoTron 將原廠車上 ECU
之點火訊號取代。 並透過 MotoTune 去調整其點 火正時, 可依需求調整其點火正時, 亦可在穩定的 HCCI 模式下停用火星塞, 或是發展點火策略來輔 助HCCI引擎。
4.2 噴油之控制
由於油門的電磁閥需要比較大的力量去推動,
因此 MotoTron ECM 之點火訊號類的 I/O, 除
了由 MotoHawk 驅動後, 還需搭配著外加的放大
電路, 去推動其電磁閥。 由 MotoHawk 設定好後,
就可利用MotoTron去調整電磁閥開啟的時間,以
調整噴油量,並且可配合進氣流量之量測,可進達到 空燃比的控制。
4.3 節氣閥之控制
電腦透過超級終端機與 CSBL 控制器作連結 去驅動一個伺服馬達, 利用伺服馬達去帶動油門線, 改變節氣閥之開度。 CSBL控制器配合馬達內的編 碼器將馬達一圈分成2000個刻度, 透過測試, 找出 閥門全開跟全關的刻度,將此範圍依比例分成90度, 就能透過電腦控制給訂一個較準確的閥門開度。
4.4 三通閥之控制
進氣是由冷、 熱空氣桶透過三通閥混合後才 到達進氣端的, 因此藉由三通閥的控制可改變冷、
熱空氣的比例, 達到進氣溫度的調整。 透過 Mo- toTron 給三通閥一個0∼5V 之間的電壓, 當 Mo-
toTron給三通閥的電壓為0V時,進氣溫度皆由冷
空氣桶提供,而當電壓為5V時,進氣溫度皆由熱空 氣桶提供。
4.5 熱交換器之控制
進氣溫度除了透過三通閥調整冷熱進氣的比 例, 還可透過熱交換器的控制, 來調整熱空氣端的 溫度。 由控制箱內的設定, 透過控制箱內 PID 控 制器的控制,熱交換器會配合熱氣端的溫度感測器, 調整熱交換器運作時間, 使熱空氣端溫度維持在設 定溫度附近。
5 實驗結果
5.1 進排氣濕度、 壓力、 溫度量測實驗
實驗操作條件:
(1) 引擎由動力計控制轉速為1800 rpm & 1500 rpm
(2)進氣溫度為室溫(約26◦C)
5.1.1 進排氣溫度與濕度量測
本實驗中是透過感測器來量測進氣溫度、 排氣 溫度和大氣濕度訊號。 再經由擷取系統將電壓訊號 傳送至電腦, 經過物理量轉換並且濾波即可得知引 擎目前的溫度和大氣濕度。 操作情況為由動力計控
Figure 7: 進排氣溫度與濕度量測
Figure 8: 引擎進排氣壓力量測-1800 rpm/min 制轉速為1800 rpm,取樣時間為0.0001秒,擷取時 間為5秒。 如圖7所示, Tin 為進氣溫度, Tex 為排 氣溫度, 從圖中可以看出進氣溫度為33.1◦C, 排氣 溫度為198.5◦C,溼度為65
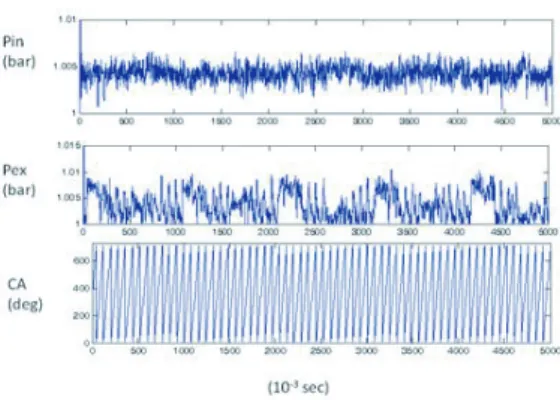
5.1.2 引擎進排氣壓力量測
本 實 驗 作 情 況 為 由 動 力 計 控 制 轉 速 為
1800rpm, 取樣時間為0.0001秒, 擷取時間為
5秒。 進氣壓力約在1.004bar, 排氣壓力約在
1.002, 如圖8所示。 而排氣壓力有些突然的上升,
可能是因為鼓風機與排氣管的抽排氣量未能達成 平衡導致的。 而動力計控制將轉速降為1500 rpm, 再擷取其壓力, 如圖9所示。 比較1800 rpm 與
1500rpm, 會發現兩種狀況下的進氣壓力並無太大
差異,而1500rpm在排氣壓力顯得更不穩定,0.5秒 的週期震盪, 可能原因很可能是排氣管與鼓風機造 成的壓力所致。
5.2 節流閥、 三通閥控制流量實驗
本實驗一樣是透過流量計來量測冷熱空氣流 量。 再經由擷取系統將電壓訊號傳送至電腦, 經 過物理量轉換並且濾波即可得知引擎目前的進氣流
Figure 9: 引擎進排氣壓力量測-1500 rpm/min
量。 取樣時間為0.0001秒,擷取時間為10秒。 由於 由馬達帶動, 因此馬達之電磁波對感測器的影響甚 鉅,因此須加入濾波器處理雜訊。
實驗操作條件:
(1)引擎轉速為1800 rpm。
(2)給一伺服馬達訊號調整節流閥開度,如表2。 (3)調整節流閥分別為:30◦及90◦。
(4)給電壓調整三通閥, 如表3。
(5) 由三通閥調整冷熱氣比例分別為 (冷%- 熱%):100-0、75-25、50-50、25-75及0-100。
Table 2: 節流閥角度-刻度對照表(伺服馬達解析
度2000)
節流閥角度 0◦ 30◦ 60◦ 90◦ 馬達刻度 0 126 252 378
Table 3: 三通閥冷熱比例-電壓對照表
冷-熱(%) 100-0 75-25 50-50 25-75 0-100 電壓(V) 0 2 2.6 3.2 4
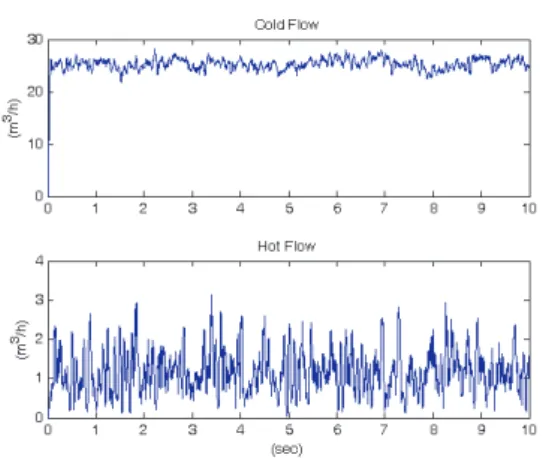
5.2.1 節流閥開度為30◦ (1)節流閥開度為30◦
(2) 由三通閥調整冷熱氣比例分別為 (冷%- 熱%):100-0、75-25、50-50、25-75 及 0-100, 如 圖10、11、12、13、14所示。
(3)圖中Cold Flow為冷空氣進氣流量,Hot Flow 為熱空氣進氣流量。
Figure 10: 節流閥30◦引擎進氣流量量測 (冷-熱) 比例100-0
Figure 11: 節流閥30◦引擎進氣流量量測 (冷-熱) 比例75-25
Figure 12: 節流閥30◦C 引擎進氣流量量測 (冷- 熱)比例50-50
Figure 13: 節流閥30◦引擎進氣流量量測 (冷-熱) 比例25-75
Figure 14: 節流閥30◦引擎進氣流量量測 (冷-熱) 比例0-100
5.2.2 節流閥開度為90◦ (1)節流閥開度為90◦
(2) 由三通閥調整冷熱氣比例分別為 (冷%- 熱%):100-0、75-25、50-50、25-75 及 0-100, 如 圖15、16、17、18、19所示。
(3)圖中Cold Flow為冷空氣進氣流量,Hot Flow 為熱空氣進氣流量。
Figure 15: 節流閥90◦引擎進氣流量量測 (冷-熱) 比例100-0
Figure 16: 節流閥90◦引擎進氣流量量測 (冷-熱) 比例75-25
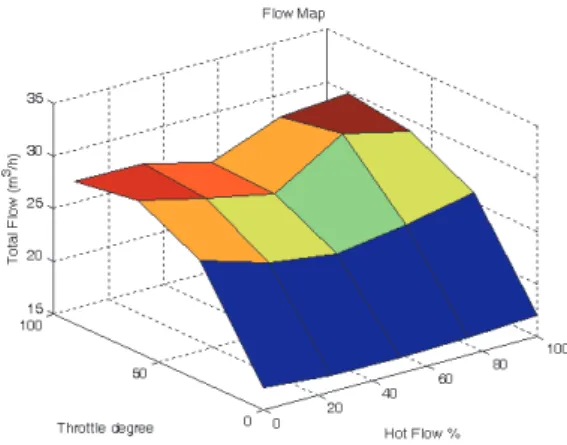
5.2.3 各節流閥開度之β值 (1)β值:F(hot)/F(total)。
(2) 改變節流閥開度, 調整三通閥比例, 觀察其β值 之變化。
(3)節流閥開度-三通閥比例之βMap,如圖20。 (4)節流閥開度-三通閥比例之總進氣流量之Map, 如圖21。
Figure 17: 節流閥90◦引擎進氣流量量測 (冷-熱) 比例50-50
Figure 18: 節流閥90◦引擎進氣流量量測 (冷-熱) 比例25-75
6 引擎適應控制
對於均質進氣壓燃引擎, 進氣閥門關閉時汽缸內混 合氣體的溫度對系統的穩定性有很重大的影響。 在 這個章節, 設計控制器將均質進氣壓燃引擎模型的 進氣後混合氣體的溫度動態系統設計成一個雙線性 離散系統, 再以此雙線性系統作參考模型適應性控 制器的設計 (model reference adaptive control,
MRAC)。 此參考模型適應性控制器的控制目標為
使系統輸出CA50維持在所想要的設定值CAdes50 。 閉迴路示意圖如圖22, 系統的輸入為再回吸揚程
RBL ,利用再回吸揚程來操控進氣結束時的氣體溫
度Tivc,進而控制輸出燃燒時間點CA50。
6.1 參數化模型
本研究以排氣再回吸(Re-breathing)之四行 程引擎為研究主體,首先將動力循環離散化,可假設
Figure 19: 節流閥90◦引擎進氣流量量測 (冷-熱) 比例0-100
Figure 20: 改變節流閥與三通閥之β曲面
Tivc(k) = Xr(k)Ter(k) + (1− Xr(k)) T1 (17) 其中,Ter 為從排氣瑞所回吸的上一個循環所 排放的熱氣體溫度, 是無法量測的溫度。T1 為 從進氣瑞引進的冷氣體溫度, 是可量測的溫度。
Xr = WW2c
1c+W2c 為混合氣體中熱氣體所佔的比率, 與輸入排氣閥再回吸揚程 RBL 有關。 從參考文 獻 [14]可知熱氣體所佔的比率 Xr 與再回吸揚程 RBL 大致呈一線性關係。 當再回吸揚程的開度增 加時,熱氣體所佔的比率也隨之提高。
假設回吸的廢氣有一定比例的熱散失, 則回吸時 的溫度 Ter 與之前排出汽缸的氣體溫度 Tbd 可以 以下式表示
Ter(k + 1) = α1Tbd(k). (18) 其中,α1為熱損失的比例,介於零到一之間,為未知 常數與排氣端控制體積CVer 中氣體與壁間的熱傳
Figure 21: 改變節流閥與三通閥之總進氣流量曲面
Online Parameter
Es!mator
Controller HCCI
Engine CA50des
CA50 RBL
mf
+
-
CA50
CA50 , c
Xr
^
θ
Θ
Figure 22: 系統閉迴路示意圖.
係數her 有關。 且從參考文獻[15]排氣溫度Tbd與 進氣溫度Tivc 的關係
Tbd(k) = Tivc(k)Ψ(mf(k), θc(k)) (19) 其中
Ψ = ( P2
Pivc )1−ne1
(20)
×
[(V (θc) Vivc
)ne−nc
+V (θc)ne−1RQLHVmf CvVivcnePivc
]1
ne
在這裡 mf 是每循環噴入的燃油質量,QLHV 為 燃油的低熱值,R 是理想理氣體常數,Cv 是定容下 的比熱值, nc 與ne分別是多變壓縮與膨脹過程中 的係數,Vivc是進氣閥門關閉時汽缸內的體積,θc 是 燃燒結束時的曲軸角度。 其中,mf 與θc 是可量測 的訊號。 在此假設Ψ為已知, 並可由一個Lookup Table依據mf 與θc 而得。
為了便於控制器的設計, 在此假設在 Tivc = 460 ∼ 475K 的區間, 已燃燒50% 燃油的時間點 CA50 與進氣溫度 Tivc 呈一線性關係。 表示當進 氣溫度 Tivc 越高時, 已燃燒 50% 燃油的時間點 CA50 越是提前。 且當噴入的燃油量不同時, 對應 的截距與斜率也會不一樣, 因此以下式表示此線性 關係
CA50(k) = α2b0(mf(k)) + α3b1(mf(k))Tivc(k) (21) 其中,b0 與 b1 分別代表截距與斜率, 是與燃油量 mf 有關的已知函數, 不同的燃油量會得到不同的 b0 與 b1。 而 α2 和 α3 則代表截距與斜率的未 確定性。 將公式(18)(19)(21)代入公式 (17) 並令 θ1= α2, θ2= α1,θ3= α1α2,θ4= α3便可得
CA50(k + 1) = ΘTΦ(k + 1) (22) 其中
ΘT = [θ1, θ2, θ3, θ4]
ΦT(k + 1) = [b0(k + 1) ,b1(k + 1)
b1(k) Ψ(k)Xr(k + 1)CA50(k) ,−b1(k + 1)
b1(k) Ψ(k)Xr(k + 1)b0(k) , b1(k + 1)T1(1− Xr(k + 1))].
因此, 在 Tivc = 460 ∼ 475K 區間可以用公式 (22)表示CA50 與Xr 的關係。
6.2 適應性控制器設計
上一節的模型簡化中, 已將進氣完汽缸內的溫度 動態系統簡化成一個參數化方程式以便控制器的設 計。 由於公式(22)中的係數向量Θ是未知的,所以 這裡將以下式的梯度法估測
Θ(k + 1) = ˆˆ Θ(k) + Γε(k + 1)Φ(k + 1) (23) ε(k + 1) = CA50(k + 1)− ˆΘT(k)Φ(k + 1)
m2(k + 1)
(24) 其中Γ = ΓT > 0為調變增益。 且
m2(k + 1) = 1 + ΦT(k + 1)Φ(k + 1) 是一個量化的訊號, 用來確保 mΦ 是有界的。 m 的 作用是在當無法確定向量Φ是否有界的情況下,也 能建立估測係數Θ為有界的性質。
為了獲得控制器的輸入 Xr , 可將公式(22) 改 寫為
CA50(k+1) = F Xr(k+1)CA50(k)+BXr(k+1)+E (25) 其中
F = θ2b1(k + 1) b1(k) Ψ(k) B =−θ3
b1(k + 1)
b1(k) Ψ(k)b0(k)− θ4b1(k + 1)T1
E = θ1b0(k + 1) + θ4b1(k + 1)T1. 在這裡定義系統輸出的追縱誤差為
e(k + 1) = CA50(k + 1)− CAdes50 (26) 其中,CAdes50 為所希望的系統輸出值。 為了達到控 制目標e(k)→ 0當k→ ∞ ,故選擇
ΘˆT(k)Φ(k + 1) = CAdes50 (27) 上式作移項後可得
Xr(k + 1) = − ˆE + CAdes50
F CAˆ 50(k) + ˆB (28) 其中
F = ˆˆ θ2b1(k + 1) b1(k) Ψ(k) B =ˆ −ˆθ3
b1(k + 1)
b1(k) Ψ(k)b0(k)− ˆθ4b1(k + 1)T1 E = ˆˆ θ1b0(k + 1) + ˆθ4b1(k + 1)T1.
但為了獲得一個物理可實現的控制輸入, 可將公式 (27)改寫為
Θ(k)Φ(k + 1) = CAˆ des50 − λδXr(k + 1) (29) 並重新定義追縱誤差為
e(k + 1) = CA50(k + 1)− CAdes50 + λδXr(k + 1) (30) 最後得到控制器的輸入
Xr(k + 1) = − ˆE + CAdes50
F CAˆ 50(k) + ˆB + λδ (31) 其中λ是一個大於零的常數且
δ =
{ 1 如果F CAˆ 50(k) + ˆB≥ 0,
−1 如果F CAˆ 50(k) + ˆB < 0.