國立台東大學體育學系 碩士論文
指導教授:溫卓謀 先生
自行車滾筒式訓練台練習對騎乘動作協調型態 與控制能力影響之研究
研 究 生: 范永奕 撰
中 華 民 國 九 十 九 年 一 月
謝 誌
雖然慢了一點,終於我還是把論文完成了。明天論文送印、裝訂成冊後,碩 士班的日子是該告一個段落了。心中的感覺是複雜的,總覺得好像不應該就這樣,
對於很多的、很多的問題好像都還一知半解,在求解答的過程中又發現了更多的 問題。論文的完成好像僅只是一篇文章,只書寫幾段後劃上的句號,未完待續…..。
不過總是一個段落,教學工作與碩士學業上兩頭燒的緊張情況也將獲得舒緩。
寫謝誌,不免俗的要感謝一些人:朋友、老師、父母親等。回想我這二年半 的過程要感謝的人還真多,真不知從何寫起?其實我覺得最應該感謝是我有這樣 一個機會可以回到學校再進修,體驗了何謂「學習是福」這一句的內涵,也讓我 在往後體育課程的教學上有更大發揮的空間。如果,我的人生少了這一段,將失 去不少的精彩。溫卓謀與陳秀惠二位老師,在我大學的階段即將結束之前才來到 學校,真的沒機會上到你們課,記憶中,好像只上到了溫老師一堂課就畢業了,
這是我一直引以為憾的。還好,在碩士班的階段可以跟兩位老師學習,當時的遺 憾總算能有所彌補。從基礎理論、方法學到實際研究過程、NASPSPA 的研究發表與 論文的完成,若沒有二位老師就沒有這一切。
育誠、阿布、小菩、小古、威寰、仲緯、邦遠、政璋等沒有提到你名字的各 位同學、學弟妹們,原諒我沒有在此一一對你們訴說我的感激之意,與各位在實 驗室不分日夜的記憶與情誼會伴隨著我一輩子。說實在的,跟各位相比,我僅比 各位多了那麼一點幸運,現在才有一份穩定的教職工作。相信我,你們的才華與 能量是令我折服的,絕對不會輸給任何一位現職的教師。加油!期望未來大家都 能有自己的一片天;還有感念附小的同仁們,尤其是學務處的各位,在我趕論文 的這段時間內對我工作上的幫忙與包容。
最後還是要以一段你、妳還有我所熟捻的一段話來當作結尾:雲如何變幻?
煙如何消散?風雨如何肆暴?在看似隨機、混亂的現象中竟隱含了驚人的次序….
沒錯!是「動力系統」。系統的演進有快、有慢,我也演進到了論文完成的固定點 了,我所感謝的各位們,讓我們一起期待下一次足夠的擾動所引起的動力分歧,
讓一切更精彩。
范永奕 謹誌 2010.01.28
I
自行車滾筒式訓練台練習對
騎乘動作協調型態與控制能力影響之研究
研 究 生:范永奕 國立臺東大學 體育學系碩士班
摘 要
本研究主要目的在透過分析自行車滾筒訓練台的學習各階段控制能力、及協 調型態改變情形,嘗詴著量化與分析多肢段複雜運動的學習過程。方法:以 12 位 沒有自行車滾筒式訓練台騎乘經驗之男性(身高:175.8cm;年齡:19.5),進行 5 天,每天 10 分鐘自行車滾筒式訓練台的練習,1 週後進行 1 分鐘的保留測驗。記 錄每一位參加者每一次詴作的成功騎乘時間繪製學習曲線;以紅外線高速攝影機,
蒐集實驗參加者與自行車每一次練習 3 維的運動學參數、記錄踩踏頻率與以肌電 測量儀蒐集下肢肌電訊號。首先,比較 5 天的學習與隔週的保留控制能力的差異 情形,接著透過學習曲線的分析,找出動力分歧發生的時間,將整個學習過程劃 分為轉移前、分歧、轉移後三個階段。分析三個階段中車架的擺動頻率、幅度的 差異與以車架在左、右水平軸的移動軌跡進行自相關分析,找出騎乘的控制模式。
再以主成份分析法對參加者全身與自行車運動學參數進行量化,藉以瞭解每一個 階段協調型態的改變。最後,透過比較下肢肌電訊號在轉移前與轉移後 2 個階段 的差異情形,來瞭解滾筒訓練台練習對下肢踩踏的改變情形。研究結果:1.控制能 力的二項指標:穩定操控能力與穩定踩踏能力的進步集中於第 1 天與第 2 天,穩 定操控能力有較佳的保留效果;2.控制模式是由學習初期有意識的補償控制至學習 後轉變為自動控制;3.自行車滾筒式訓練台學習過程為不連續的學習過程;4.由主 成份分析後所得到成份矩陣可反映出騎乘者經練習後動作協調結構轉變的情形,
學習過程協調結構產生重組,達到騎乘穩定。5.騎乘者動作中存在二種連動的平衡 控制協調結構,且與車架移動軌跡的自相關相呼應,平衡控制協調結構在成份的 地位越重要,自相關的型態快速收斂到負相關的值越大。6.學習前雙腳用力不均的 差異,在學習後是增加或減少,則因參加者而有不同,顯示踩踏用力情形並不影 響騎乘的穩定。
關鍵詞:自行車騎乘、協調型態、控制能力
II
The effect of riding roller bike trainer on the pattern of riding coordinate and movement control
Yung-Yi Fan
Abstract
The main purpose of study aimed to quantify and analyze the changes of control, steady riding ability and coordinate pattern within different phases of riding on a roller bike trainer as the learning process of multiple-segmental complex movement. Method:
12 health males without any experience of riding on a roller bike trainer were recruited to learn to ride a bicycle on the roller trainer and practiced ten minutes per day for five days. There was a one minute retention test after a week from the last train trial for each participant. The successful riding time of each participant each trial was recorded to plot learning curves. The three-dimensional coordinates of whole body joints, pedal frequency and EMG data of lower body of participants were collected. First of all, the comparison of control ability between 5 days and retention test was made. Furthermore, dividing the entire learning process into three phases (before, after transformation and bifurcation) was according to the time emerging bifurcation via analyzing the learning curves. The diversity of the frame of swing frequency, amplitude and autocorrelation of the frame in horizontal axis the moving trace in three phases were used to find out the riding control pattern. The change of coordinate pattern in each phase was quantified the kinematics of participants and the bike via Principle Component Analysis (PCA). In the end, comparing the differences in two phases (before and after transformation) from EMG data of lower body of participant was to realize the changes of pedal on a roller bike trainer. Results:1. The standards of riding control were mainly improved in the first and second day. 2. Learning to ride the bicycle on roller trainer revealed a discrete progressing process. 3. The control pattern in the beginning was compensate-control with consciousness but transformed to auto-control after learning. 4. The component matrix from PCA reflected the change of coordinate movement structure after learning.
The structure of movement coordinate was recombined during the learning process. 5.
There were two types of balanced coordinated control movement structure which existed within the riding and reacted with the autocorrelation of the moving trace of the bike frame. 6. The unequal force in pedaling of participants were reduced or increased after learning which demonstrated the force in pedaling was not affected the steady performance of riding.
Key words:cycling, coordinate pattern, movement control
III
目 次
中文摘要... і
內容...ii
表次………...iii
圖次………...…..…..iv
第壹章 緒論 ... 1
第一節 問題背景 ... 1
第二節 研究重要性 ... 3
第三節 研究目的 ... 4
第四節 研究問題與假設 ... 4
第五節 研究範圍與限制 ... 5
第六節 名詞操作性定義 ... 6
第貳章 理論基礎與文獻探討 ... 8
第一節 動作行為與學習基礎理論 ... 8
第二節 三角限制、量化動作學習與協調之相關研究 ... 11
第三節 自行車騎乘姿勢控制與動作分析 ... 16
第四節 肌電訊號 ... 18
第五節 文獻總結 ... 20
第參章 研究方法與步驟 ... 21
第一節 研究架構 ... 21
第二節 研究對象 ... 22
第三節 研究工具 ... 23
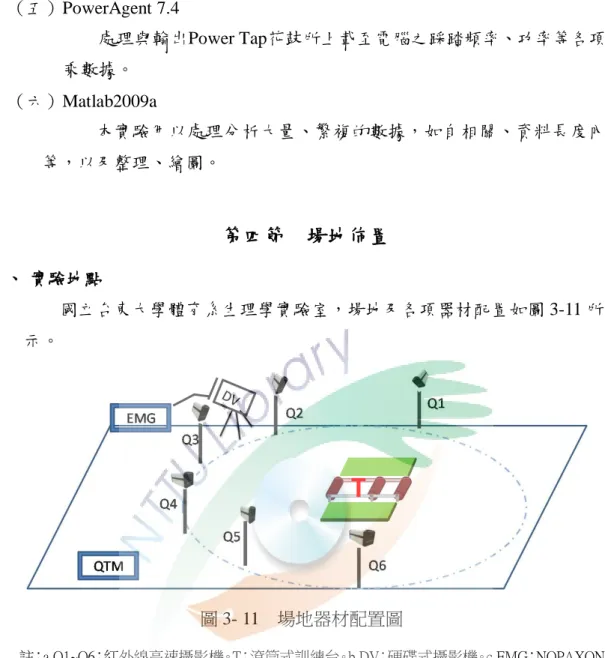
第四節 場地佈置 ... 27
第五節 實驗流程與步驟 ... 28
第六節 資料處理分析與統計 ... 33
第四章 結果與討論 ... 38
第一節 自行車滾筒訓練台學習曲線 ... 38
第二節 騎乘動作協調型態的轉變 ... 43
第三節 騎乘者動作調整機制分析 ... 65
第四節 控制能力改變情形分析 ... 69
第五節 控制模式 ... 74
第五節 肌電訊號分析 ... 76
第七節 綜合討論 ... 90
IV
第五章 結論與建議 ... 94
第一節 結論... 94
第二節 建議... 95
參考文獻 ... 96
中文部分 ... 96
西文部分: ... 97
附 錄 ... 101
附錄一 實驗流程說明及注意事項 ... 101
附錄二 各階段大於 1 的特徵值與解釋量 ... 102
附錄三 Broken stick 篩選後之成份矩陣 ... 104
附錄四 成份矩陣圖 ... 136
附錄四 轉移前、後成份分數圖 ... 146
附錄五 學習階段區分圖 ... 154
V
表 次
表 3-1 參加者基本資料表 ... 22
表 3-2 研究假設與統計考驗一覽表 ... 36
表 4-1 滾筒訓練台練習各階段 PCA 解釋量.. ... 44
表 4-2 轉移前、後階段成份分數相關分析 ... 47
表 4-3 一般學習組踩踏結構轉移趨勢表 ... 60
表 4-4 5 天與保留測驗頭管中心點 Y 軸位移描述統計摘要表 ... 70
表 4-5 5 天與保留測驗頭管中心點 Y 軸位移變異數分析摘要表 ... 70
表 4-6 5 天立即表現測驗與保留測驗平均踩踏頻率描述統計表 ... 71
表 4-7 5 天立即表現與隔週保留測驗踩踏頻率變異情形描述統計摘要表 ... 72
表 4-8 5 天立即表現測驗與保留測驗踩踏頻率變異數分析摘要表 ... 72
表 4-9 轉移前、中、後車架擺動頻率描述統計摘要表 ... 75
表 4-10 轉移前、中、後車架擺動頻率變異數分析摘要表 ... 75
表 4-11 轉移前、中、後車架擺動幅度描述統計摘要表 ... 75
表 4-12 轉移前、中、後車架擺動幅度變異數分析摘要表 ... 76
表 4-13 轉移前後二階段左、右股直肌、股二頭肌 EMG 比值變異數分析摘要表 ... 76
表 4-14 轉移前、後階段與左右腳股直肌、股二頭肌肌電訊號比值單純主要效果描 述統計摘要表... 79
表 4-15 轉移前、後階段與左右腳股直肌、股二頭肌肌電訊號比值單純主要效果 變異數分析摘要表 ... 81
表 4-16 轉移前、後二階段與左、右臀中肌 EMG 變異數分析摘要表 ... 83
表 4-17 轉移前、後階段與左、右臀中肌肌電訊號單純主要效果描述統計摘要表 ... 86
表 4-18 轉移前、後與左、右側臀中肌肌電訊號單純主要效果變異數分析摘要表 ... 87
VI
圖 次
圖 3-1 研究架構圖 ... 21
圖 3-2 實驗參加者跨下長測量方法 ... 23
圖 3-3 滾筒式訓練台 ... 23
圖 3-4 反光球 ... 24
圖 3-5 MOTION CAPTURE 高速攝影機 ... 24
圖 3-6 校正棒 ... 24
圖 3-7 校正架 ... 24
圖 3-8 硬碟式攝影機 ... 24
圖 3-9 NORAXON TELEMYO 2400TG2 肌電測量儀 ... 25
圖 3-10 CYCLEOPS POWER TAP ... 26
圖 3-11 場地器材配置圖 ... 27
圖 3-12 滾筒式訓練台操作方式與POWER TAP安裝方式示意圖 ... 28
圖 3-13 實驗流程圖 ... 29
圖 3-14 反光球位置圖... 30
圖 3-15 電極黏貼位置圖 ... 31
圖 3-16 實驗操作流程圖 ... 32
圖 3-17 三維空間座標示意圖 ... 33
圖 4-1 快速學習組學習曲線圖 ... 39
圖 4-2 一般學習組 N3、N5、N6、N7 學習曲線圖 ... 40
圖 4-3 一般學習組 N8、N10、N11、N12 學習曲線圖 ... 41
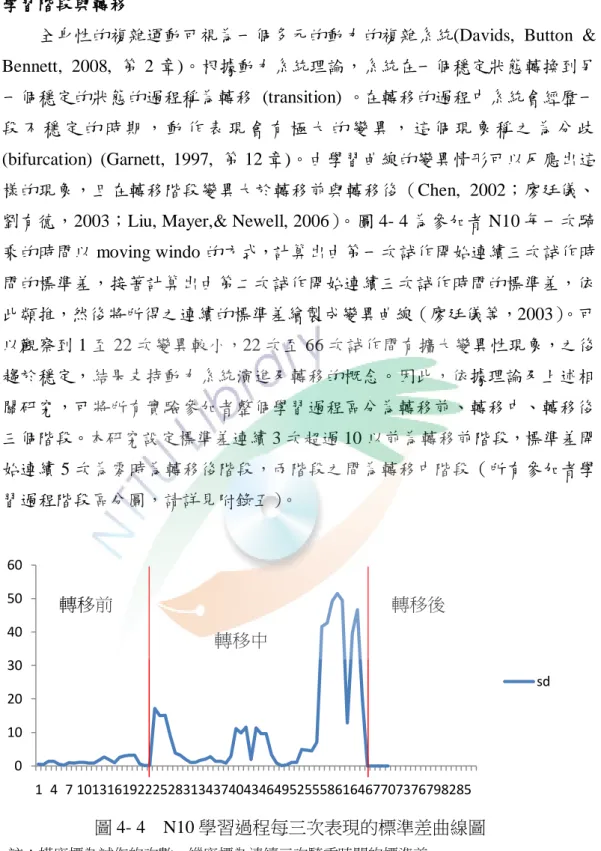
圖 4-4 N10 學習過程每三次表現的標準差曲線圖 ... 42
圖 4-5 各成份解釋量圖 ... 45
圖 4-6 各階段整體平均 1~4 成份解釋量統計 ... 45
圖 4-7 快速學習組總解釋量變化圖 ... 46
圖 4-8 一般學習組總解釋量變化圖 ... 46
圖 4-9 快速學習組轉移前(左)、後(右)二階段成份分數圖 ... 48
圖 4-10 一般學習組轉移前(左)、後(右)二階段成份分數圖 ... 48
圖 4-11 參加者 N1 轉移前階段成份矩陣圖 ... 49
圖 4-12 N1 轉移中、後階段成份矩陣圖 ... 50
圖 4-13 N2 三階段成份矩陣圖 ... 51
圖 4-14 N4 三階段成份矩陣圖 ... 52
圖 4-15 N9 轉移前、中階段成份矩陣圖 ... 53
圖 4-16 N9 轉移後階段成份矩陣圖... 54
圖 4-17 N3 轉移前階段成份矩陣圖... 54
圖 4-18 N3 轉移中、後階段成份矩陣圖 ... 55
VII
圖 4-19 N7 三階段成份矩陣圖 ... 56
圖 4-20 N8 三階段成份矩陣圖 ... 57
圖 4-21 N10 三階段成份矩陣圖 ... 58
圖 4-22 平衡控制結構... 61
圖 4-23 N3 轉移階段第一成份成份矩陣圖與自相關分析圖 ... 62
圖 4-24 一般學習組轉移前、後階段第二成份分數 ... 64
圖 4-25 快速學習組轉移前、中、後時間延遲自相關 ... 66
圖 4-26 一般學習組 N3、N6、N7、N8 轉移前、中、後時間延遲自相關 ... 67
圖 4-27 一般學習組 N10、N11、N12 轉移前、中、後時間延遲自相關 ... 68
圖 4-28 方向操作能改變趨勢圖 ... 71
圖 4-29 穩定騎乘能力趨勢圖 ... 73
圖 4-30 參加者 N3 轉移中階段車架 Y 軸(左、右向)位移軌跡圖。 ... 74
1
第壹章 緒論
本章共分為六節:第一節 問題背景;第二節 研究重要性;第三節 研究目的;
第四節 研究問題與假設;第五節 研究範圍與限制;第六節 名詞操作性定義
第一節 問題背景
一般而言,運動技能學習是指來自經驗或透過練習造成特定能力表現上的長 久性改變。Fitts (1964) 定義運動技能學習為「瞭解技能表現在時間與空間上如何 達到高度的組織」。上述是對學習的定義。而人類是如何學會一項新的技能或動作?
這是一個存在已久的問題,一直以來都是研究人類動作的科學家們很感興趣的一 個問題。學習如何來量化?是什麼改變了而讓人學會一項新的運動技能?早在 1926年Snoddy就利用學習鏡描的實驗來探討人類的動作學習並且以學習曲線的方 式量化學習。之後許多的對動作技能學的研究與相關理論被提出,特別是認知心 裡學中由訊息處理理論的觀點,針對動作學習提出了許多著名的學習理論,對動 作學習的研究奠定相當的學理基礎。然而早期受限於科技與科學發展所限制,所 以過去動作學習的過程是較不容易被觀察的,使得關於動作技能學習的研究多偏 向於結果或表現的量化,且對於全身性複雜動作的學習,這些研究與理論最大問 題就是過於抽象。
最早於1970年代由美國加州柏克萊大學的一群數學家開始,用一種以非線性 的數學方法探討自然界中非線性的複雜系統的各種現象(人體的動作行為亦屬於 非線性的複雜系統之一),由自然界中看似混亂的各種系統中描繪出隱含於其中次 序,並透過對外顯行為的分析藉以瞭解系統動力的轉變情形,這個方法即為動力 系統理論。對於動作的學習動力系統將之視為各子系統的互動、協調及自我組織 後所產生的結果,各子系統包含神經、肌肉、骨骼等個體本身的系統或外在各項 因素。
當將動力系統理論的研究範圍延伸至人類動作行為的這一個領域時。研究人 體動作的 科學家注意到了俄國神經生理學家 Bernstein (1967) 提出的自由度 (degree of freedom) 概念,認為動作學習為「有效的控制身體多餘的自由度」,正 與動力系統中系統如何轉變並產生次序的概念符合。自此,動作學習過程中協調 型態與自由度改變開始被頻繁的探討與研究。Haken, Kelso和Bunz (1985) 以簡單 的手指擺盪的研究(HKB模式)開始一連串的相關研究檢驗了動力系統各項特性,
2
如動作型態的轉移、吸引子的特性等。同一時期Newell (1986) 於動力系統的架構 下提出,在限制之間的交互作用下會決定個體活動的最佳協調與控制,限制若能 滿足,動作協調即會形成,這三種限制是為有機體限制(Organismic Constraints)、
環境限制(Environmental Constraints)、工作限制(Task Constraints)。至此,在動 力系統的概念下透過外顯的行為或子系統間的互動,研究動作學習過程中協調型 態的產生是可行的。因此,動力系統研究對動作行為的最大貢獻是提供了方法與 概念對於新動作的產生過程做清楚的描述。同時又因科技大幅進步的關係對人體 動作的研究也逐漸由單肢段的簡單動作,朝全身性多肢段的複雜運動方向轉變。
對於學習的過程中到底是哪裡發生了改變而致於習得如游泳、騎自行車等這些全 身性的動作技能?這個問題也開始逐漸有了較明確的解答。
那麼在動力系統的架構下,複雜運動的學習如何量化呢?個體本身各關節、
神經、肌肉等自由度如此的龐大,如何將之一一量化。傳統量化學習的學習曲線 以動力系統理論進行探討是一個可行的方法(陳秀惠,2003;廖庭儀、劉有德,
2003;陳秀惠、劉有德,2007;Chen, 2001;Liu, Mayer, & Newell, 2006),因為 複雜運動為一個動力系統,研究系統在時間刻度下的變化,可以瞭解系統行為的 演進;至於複雜運動自由度過於龐大如何有效的探討?延續Bernstein (1967)、
Newell (1986) 的概念,學習初期僵硬的動作是為了幫助有機體處理大量的自由度,
在練習之後肢段間僵硬固定的結構會開始動搖成為特定工作目的下的協調結構,
成為僅依賴數個由自由度連動而產生動作。所以透過研究系統維度的變化也可以 瞭解系統狀態的演進。在統計學上的因素分析中主成份分析法是用來對龐大的資 料進行分類、縮減的方法,可去除高維度資料中重複的訊息,也可將之縮減為最 少的模式或結構。這個概念,應用在複雜動作中的運用可以找出動作中所含有連 動的自由度,使得人體多肢段複雜的協調結構可以較少的成份動作來進行分析,
是一個可行的分析方式(陳秀惠,2005)。
在眾多的運動技能之中自行車一直有相當的獨特性存在。幾乎每一個人都有 學習騎自行車的經驗,是一種相當普遍的運動、是一種交通工具,同時也是由第 一屆奧林匹克運動會就存在至今的競技項目之一。自行車本身就是一種工作限制,
車架、輪徑的大小、曲柄的長度、齒輪比等任何一種排列組合的搭配都會使騎乘 者有不同的踩踏方式。騎自行車是多數大眾所熟悉的一項動作技能,但對滾筒式 訓練台(圖3-12)的騎乘卻是一項全新的體驗、一個新的動作協調或者現有的騎乘 協調結構必頇修正。儘管本身已經會騎自行車了,但第一次上滾筒訓練台仍然無 法雙腳離地於上面停留,即便是選手若從來未騎過滾筒訓練台也是如此,更別談
3
騎乘了。在經過幾次的練習後開始可以於其上騎乘但仍然有控制的問題,稍不留 神或動作改變即出現跌倒的情形。經過一段時間的練習後,開始可以穩定的騎乘 與操控位置,最後,如專業的選手們甚至可以於其上做出單手、放手、加速、衝 刺等騎乘動作。練習騎乘滾筒訓練台是自行車選手訓練踩踏動作的穩定以求更高 的騎乘效率常用方法之一。一般教練、選手們認為滾筒訓練台的練習可以使雙腳 踩踏施力更為的平均以致於騎乘效率的改善。也就是說由無法在上面騎乘到可以 穩定的騎乘於其上面,雙腳的施力情形是重要的關鍵。但由不會學到會,再由學 會到增加踩踏效率這之間僅僅是這樣單純的雙腳施力更平均所致的改變嗎?或者 是其原理是透過工作限制改進騎乘動作整體協調型態,進而達到改善運動表現的 目的。這樣一個過程似乎正如Newell (1985)所提協調、控制、技能三階段,也反映 出自由度凍結與釋放現象 (Bernstein, 1967) ,因此觀察其學習的過程亦即是觀察 協調型態改變的過程。
在過去自行車的研究中多集中於生理學、力學用以增進騎乘成績的表現,而 忽略騎乘動作本身是研究動作技能學習與協調型態的產生相當適合的一種全身性 的複雜運動、是個體發生動作。Sparrow, Lay 與 O’Dwyer (2007)延續HKB模的概 念,由動作學習與協調動力的觀點自行車騎乘進行同相 (in-phase)、反相 (antiphase) 及90°相(90°phase)三個相位的踩踏對能量的消耗進行探討,發現同相的踩踏是 最經濟的。王甯(2007)也提出除身體素質之外,優秀游泳運動員在空間與時間 的調配應有其固定且穩定的協調,並強調四肢協調對於游泳前進速度表現是重要 參數之一。所以,良好的協調型態對運動表現是有助益的。
第二節 研究重要性
三角限制的作者Karl M. Newell在多次的場合中不止一次的強調對於「研究全 身性複雜運動的重要性」。所以這是當今運動技能學習與動作控制的一個趨勢與 必頇的方向。不過全身性複雜運動的探討仍有其困難所在:全身肢段這麼多的維 度要如何去探討?什麼是重要的?實驗操作上實際執行面的困難等等。再者研究 者所選擇的工作項目 (Task),或者觀察、分析的指標等都直接的影響研究的成功 與否。所以在過去動作技能學習或協調型態相關研究仍然多以簡單的單肢段動作 技能或系統發生動作如:走路、平衡等進行探討,且多以橫斷性研究法進行之。
又因為資料龐大處理難度相對提高,所以實驗參加者的人數多以個案或5~6人進 行之,而難以達到統計上的推論效果,而無法對複雜動作進行完整的探討。例如:
4
相對於隨著時間累積而持續進步這種連續性的學習型態,像游泳、騎單車這種不 連續的學習型態在全身性複雜運動中是常見的,卻不容易在實驗中被量化與記錄,
尤其是實驗的工作是多肢段複雜運動,所以對於實際運動技能的學習與技能表現 的增進也無法提供較直接的助益。
在動力系統的觀點下運動技能學習是指身體動作在各子系統為達成特定目地 的自我組織所產生協調結構的轉變。所以欲瞭解複雜動作是如何發生,對研究整 個學習過程中,身體各肢段間協調結構與動作型態進行完整探討是不可或缺的重 點。自行車滾筒訓練台學習是一個合適的探討項目,其難易度適中,沒有移動範 圍的問題,是全身性的複雜運動等。因此,本研究嘗詴以較多的樣本(12人)騎 乘自行車滾筒訓練台學習,期望藉此反映與自行車學習過程那種不連續的學習型 態,再由反應騎乘控制能力的結果變項,搭配學習過程中騎乘控制模式及協調型 態變化情形,進行探討與勾勒全身性多肢段複雜系統學習過程整體轉變的全貌。
也期望能藉此找出自行車學習的重要關鍵,進而提供實際教學上的參考。
第三節 研究目的
本研究主要之研究目的在透過探討自行車滾筒式訓練台學習過程,藉以瞭解 全身性多肢段複雜運動的學習。共分為兩大部分:
一、透過參加者個別化的學習曲線探討學習過程整體學習型態的變化、控制模式 與動作協調的改變情形。
二、透過推論統計分析學習過程騎乘控制能力、控制模式改善的情形,以及雙腳 踩踏肌電訊號變化情形。
第四節 研究問題與假設 一、 研究問題
(一)個別化分析
1. 自行車滾筒式訓練台學習過程學習曲線型態變化為何?
2. 學習過程中控制模式及動作協調型態變化情形為何?
(二)推論統計 3. 控制能力
(1) 自行車滾筒訓練台學習過程穩定操控的能力進步情形為何?
(2) 自行車滾筒訓練台學習過程穩定踩踏的能力進步情形為何?
5
4. 控制模式
(1) 自行車滾筒訓練台學習過程車架擺動頻率改變情形為何?
(2) 自行車滾筒訓練台學習過程車架擺動幅度改變情形為何?
5. 自行車滾筒訓練台學習過程雙腳肌電訊號變化情形為何?
二、 研究假設
(一)控制能力
1-1 學習者穩定操控能力在 5 天的學習過程及保留測驗的差異達顯著水準。
1-2 學習者穩定踩踏能力在 5 天的立即表現測驗及保留測驗的差異達顯著水 準。
(二)控制模式
2-1 學習過程轉移前、中、後三階段車架單位時間內左、右擺動的頻率達顯著 差異。
2-2 學習過程轉移前、中、後三階段車架單位時間內左、右擺動的幅度達顯著 差異。
(三)雙腳肌電訊號
3-1 轉移前、後二階段與左、右腳股二頭肌、股直肌肌電訊號比值交互作用達 顯著差異。
3-2 轉移前、後二階段與左、右臀中肌電訊號交互作用達顯著差異。
第五節 研究範圍與限制 一、 範圍
三角限制對協調的型態有絕對性的影響,其中有機體限制的部分,參加者不同 造成協調的結果可能是個人化的,所以研究結果對教學、訓練之建議可能僅止於較 大的原則。
二、 限制
(一)本研究所給予參加者之學習目標為 80rpm 與 150 watts,但卻無法要求參加 者準確的執行,僅能要求參加者在騎乘過程中透過及時的回饋,在學習初 期往目標趨近,學習過程中、後段儘量維持在目標踩踏頻率與功率。
(二)因為參加者 N5、N6 參加者在資料蒐集的過程中發生反光點脫落的情形,
且未即時發現,造成轉移前資料缺損無法進行主成份分析。所以僅有 10 位 參加者的資料進行主成份分析;在控制模式自相關部分,參加者 N5 轉移前
6
檔案在處理過程遺損,所以無法進行自相關考驗。
(三)本研究中對於成份矩陣的分析,目前尚缺乏更客觀之方法或工具,所以僅 能由研究者透過 Matlab 軟體編寫程式,進行模擬成份動作做出判斷。
(四)參加者所騎乘之自行車設定依其身材循標準原則設定,確定後即不再進行 更動,以避免對實驗結果造成影響。所以其設定可能並非參加者最佳的騎 乘設定。
第六節 名詞操作性定義 一、 協調型態
Bernstein(1967)指出,協調就是控制多餘自由度的過程。Kugler, Kelso 與 Turvey (1980) 認為協調是包含多重的空間與時間刻度的複雜關係。
Newell (1985) 將協調、控制、技能分為三個層次,認為協調是指身體肢段在 特定時間、空間下的組合。從事相關運動或外顯行為可辨別其動作形式,就 可以說達到協調,有協調還不代表動作執行能力好,只表示已經具有協調的 型態在裡面(王甯,2007)。Turvey (1990) 將協調定義為身體肢段在特定時 間時必頇出現在相對環境中的位置,是最基礎的動作型態。
本研究以主成份分析所獲取的成份分數、成份矩陣內容表示之,並比較 學習前後的變化找出生手學習滾筒訓練台踩踏的過程動作型態的轉變情形;
以 MR-XP 1.07 Master Application Protocols 軟體分析所擷取之肌電訊號,找 出各左、右腳股直肌與股二頭肌(互為拮抗與作用肌)的肌電訊號標準化後,
求得作用肌與拮抗肌相除的比值用以反應動作者肌肉協調情形。
二、 控制能力
身體在環境當中所從事的工作任務,控制身體姿勢的定位,被定義為身 體在工作任務中,身體各個部份能夠維持在適當的關係中,包含在空間中控 制身體的定位和身體的穩定度。本研究操作型定義指騎乘者自行車穩定操控 能力與踩踏穩定的程度。方法如下:
(一) 穩定操控能力:以 5 天及保留測驗每天第一次詴作車架頭管光點位置在 Y 軸之位移的標準差變化量化之,藉以瞭解該點變異的情形,標準差越 大代表操控的穩定性越差,藉以反應映騎乘者穩定操控能力。
(二) 踩踏穩定能力:以 5 天及保留測驗每一次詴作動作者騎乘的踩踏頻率標 準差量化之,標準差越大代表踩踏穩定能力越差。
7
三、 整體學習型態
以記錄每一位實驗參加者由第一次練習開始至可以連續 5 次完成 2 分鐘 騎乘的這段過程中,每一次雙腳離地至落地的次數與時間。以次數為橫座標 軸,該次騎乘時間為縱座標,製作個別學習曲線表示之。並依循動力系統理 論將學習過程區分為轉移前、中、後三階段。
四、 控制模式
(一)以車架頭管光點在三維空間 Y 軸(左、右向)的擺動頻率及幅度量化之。
(二)將車架頭管光點在三維空間中 Y(左、右向)軸擺動的軌跡進行自相關 分析,藉由比較光點自身前後的關係反映動作者的控制模式。
8
第貳章 理論基礎與文獻探討
本章乃在針對基礎理論及過去相關研究做歸納整理,共分為六節:第一節 動 作行為與學習基礎理論;第二節 三角限制、量化動作學習與協調之相關研究;第 三節 自行車騎乘姿勢控制與動作分析;第四節 肌電訊號,第五節 文獻總結。
第一節 動作行為與學習基礎理論 一、 動作學習概念
運動技能學習是指來自經驗或透過練習造成特定能力表現上的長久性改變,
Fitts (1964) 定義運動技能學為「瞭解技能表現在時間與空間上如何達到高度的組 織」。Bernstein (1967) 則認為運動技能的學習與人體自由度的控制有密切的關係。
Kerr (1982) 將運動技能的學習區分為「系統發生動作」與「個體發生動作」兩大 類。系統發生動作所指的為一般正常人隨系統發展而學會的動作,如伸手取物、
走路、跳躍等。而個體發生動作則為個體需加以訓練才能學會的技能,如騎自行 車、籃球上籃與直排輪等;綜合以上所述運動學習是指身體動作在達成特定目的 工作時精確度和熟練度上的增進。
二、 動力系統理論下的技能學習
以動力系統的觀點來看,技能的學習是從一種不會的穩定的狀態到另一個會 的穩定狀態的過程,是對現存的協調結構的修正。也是固有動力往工作動力修正 的過程,且兩者之間的關係是非線性的關係。Newell, Liu & Mayer(2001)將學習 以學習景觀來加以譬喻,學習景觀如地形等高圖一般,有高低起伏,隨著學習的 進行景觀也不斷的再在改變。個體的偏好也就是較穩定較常出現的行為即固有動 力,就如一顆球停留在景觀中較低的位置,越低的點代表越穩定的動作型態,隨 著動作的發展,景觀隨著改變,原本凹陷的位置可能變得較為平緩,因此球變得 較不穩定較容易離開原來的位置,到另一個穩定的位置即目標動力的方向移動。
換言之,在學習的過程中隨著動作的發展,新動作因為舊動作變得不穩定而產生。
學習是一種在現有協調基礎下形成新型態的過程,所有的學習皆來自於對現有的 結構做修正(陳秀惠,2005),隨著學習的過程,整個景觀 (landscap) 會不斷的 轉換。
9
(一)練習
練習會導致整個協調系統的型態產生變化,同時使這個變化呈現出 來。經過練習,原先的協調對稱型態會被打破,新的型態隨之產生。以 學騎腳踏車為例,身體的重心總是朝著地心引力的方向(重力)去,必 頇等到改變這樣的習慣(協調結構),會將重心往反方向作平衡後,才能 順利的上路。經充分練習後,不穩定的協調型態會被轉換,而原先穩定 的會繼續保持或更為穩定 (Kelso, 1995)。
(二)保留
學習既然為恆久性的行為改變,也就代表著所練習新動作的進步可 以留存於個體一段時間;所以可以將練習學會的運動技能在一段時間不 再練習後繼續留存下來就稱為保留。以動力系統來解釋,已達穩定的技 能會有較深較除的景觀,所以久未練習的技能很快的就能回到景觀底部 的附近。
(三)遷移
動作技能遷移在動力系統的架構下可視為,欲學習新動作的動力與 學習者本身固有的動力合作或競爭的結果,當固有動力與工作動力相近 或一致時,新的動作或協調就比較容易產生,也就是動力系統理論中所 謂的合作現象。反之,當兩者不一致時,競爭的現象也因之而發生。兩 個動作動力一致時容易產生正向的遷移,動力互相競爭時則容易產生負 向的遷移。Zaone & Kelso (1997) 延續之前的 HKB 模式以兩手食指的擺 動,來探討學習與遷移。在這個實驗中他們將參加者分成兩組分別操作 學習兩手食指的相位差 90 度和 270 度的技能,然後於過程檢驗實際表現 與目標的差距。結果發現於練習前表現最穩定的位置是 180 度與 306 度,
經過練習後 90 度這一組的誤差逐漸縮小,但原先較穩定的 180 度這一個 位置差距卻變大,沒有練習過的 270 度的這個位置的差距也隨之縮小。
另一組學習 270 度的也發現同樣的情形,270 度差距縮小,原先穩定的 180 度差距變大,90 度差距變小。此一實驗結果為動作技能的遷移提出 具體的解釋。
三、 協調型態的產生
(一)人體運動的自由度
神經生理學家 Bernstein (1896-1966) 提出關於人體自由度的問題,探 討人體動作的協調結構,指出動作者在從事新的動作時,會凍結身體多
10
餘的自由度。因為個體為達成目標動作的要求,必頇掌握的是千百條肌 肉的收縮、放鬆與各骨骼關節於其能轉動的軸向活動等相當複雜且龐大 的變數。透過將自由度凍結降低至較容易掌控身體的動作,透過學習後 再慢慢釋放各個關節,將自由度增加而可以控制,因此 Bernstein (1967) 認 為「運動中身體的控制,是要能管理多餘的自由度」,而且建立各元素之 間的關係是降低自由度的方法之一。
(二)協調、控制與技能
人是個自由度相當龐大的組合體,而中樞神經沒有可能逐項控制肌 肉、關節與可能的動作型態,因此個體會將動作自由度壓縮到最小、最 容易控制的單位,即稱為協調結構(成戎珠,1994)。個體是如何達到 降低自由度?使原本各自獨立的元素在同一條關係函數上,就能轉換成 協調結構的型態並達到降低自由度的效果(陳秀惠,2005)。建立元素 間的關係即能降低自由度形成協調結構。Kugler, Kelso and Turvey 於 1980 年透過數學函式說明協調、控制與技能三者之間關係 (Newell,
1985):
1. 協調
協調是一個將各種變數 (A, B, C, .... X, Y, Z) 限制在一定範圍並且賦 予變數間關係的函數形式,可以用 f (A, B, C, .. X, Y, Z) 的函數意義來表示 協調的意義。
2. 控制
在既有協調結構上確定方向、速度、力量等控制參數,可用 f (Ai, Bj, Ck….Xr, Ys, Zt) 函數形式來表示控制的意義。
3. 技能
技能就是f (Ai, Bj, Ck……. Xr, Ys, Zt)之間各個變數與參數值的關係 達到最佳化,以符合該技能項目的最理想型態,達到最有效率的作功。
四、 三角限制
Newell(1986)於動力系統的架構下提出,個體動作在三種限制之間的 交互作用下會決定最佳的協調與控制,限制若能滿足,協調即會浮現,而這 三種限制是為有機體限制(Organismic Constraints)、環境限制(Environmental Constraints)、工作限制(Task Constraints),三種限制的內容敘述如下(Newell,
1986):
11
(一)有機體限制
個體的身高、體重、經驗、反應等個項因素,亦即個體本身生理與 心理的各項狀態限制,可分為「結構性限制」與「功能性限制」,個體的 身高、體重在發展上有一定的順序與規則,且改變的速度十分緩慢,需 要相當冗長的時間才能完成,因此身高、體重被假定為個體在協調發展 上的「結構性限制」,相反地,神經突觸間的連結是協調發展最根本的元 素,因此個體的反應、經驗等被視為「功能性限制」。
(二)環境限制
環境限制一般被認為是在生物體以外環境屬性所附加的限制。在有 機體和環境交互作用下非有機體內部的任何限制都可以被視為環境限制,
例如:個體的重力、實際比賽情境中氣溫、風向、光線等。
(三)工作限制
工作限制所界定範圍為動作完成所需符合的特定目標、規則以及所 使用的工具;本實驗工作限制為自行車滾筒訓練台。
五、 小結
在動力系統理論架構下動作技能的學習是整個景觀不斷改變的歷程。動 作協調是各子系統互動的結果,各系統間並沒有主從的關係,是在同時符合 環境、工作、有機體三個子系統限制下出現的行為(Newell, 1986)。三者之 中任一個有些許的改變都會對協調形成有很大的影響(動力系統對初始條件 的敏感度)。因此,藉由工作限制來促進動作協調的形成,或是藉由工作限 制的介入使其技能表現獲得改善,是相當可行的。如自行車滾筒式訓練台的 訓練,此一部份也為本研究欲探討的重點之一。
第二節 三角限制、量化動作學習與協調之相關研究 一、 三角限制相關研究
Brown & Jensen (2006) 以成年人、青少年、幼童各七人探討肢體質量和 轉動慣量對自行車踩踏影響的研究中發現,當將幼童、青少年大腿與小腿重 量的比例調整成與成人一樣時,幼童、青少年的踩踏力量結構型態就變得與 成人相當接近。證明小孩與成人踩踏力量結構不同是來自於結構性的有機體 限制,而非中樞神經發展的影響。同時肢體的質量與轉動慣量皆與重力有關,
所以也可視為環境限制所造成的差異。
12
Kamm, Thelen & Jensen (1990) 對於初生嬰兒學步動作做了一系列的研 究,他們首先記錄嬰兒 2-6 週身體生長的變化,發現這時期嬰兒的體重增加 的比例較身高快許多。然後分別在腿上綁上重物和沒有綁重物的嬰兒出現步 行動作的次數,結果後者步行較多。然後又將嬰兒放進水中藉著水的浮力減 少嬰兒腿部的負擔,在跟沒有放進水中的比較出現步行動作的次數,結果發 現腿部負擔小的嬰兒出現較多的步行動作(成戎珠,1994)。實驗的結果證明 了嬰兒學步的動作並非早期所認為的反射動作,符合動力系統理論中次系統 限制(有機體限制)產生行為的觀點。
林耀豐(2002)以不同技能水準三組及 9 種球拍型態的工作限制探討網 球正手拍擊球,研究結果指出,不同技能水準與不同工作限制,對網球正手 擊球之技能表現結果與品質,有一定程度的影響,且各動作成分之間的發展 並非同步。
李梅華(2004)以嬰幼兒運動發展的理論為基礎,選擇抓握動作為特定 項目,以 10 名嬰幼兒為對象,從 9 週至 37 週,每兩週一次,以不同質地、
大小的球體,觀察嬰幼兒在不同工作限制下其抓握動作的發展;以影片拍攝 的方式收集資料。結果顯示,嬰幼兒在 9 週大時由於視覺、動作能力尚未成 熟,未能產生自主性的手部動作,至 17 週時由於視覺敏銳度及身體姿勢控制 能力的提昇,可觀察到嬰幼兒產生自主性的手部粗略動作。透過一段時間的 探索,嬰幼兒在 37 週大時,可以應用控制觸覺及視覺訊息,完成更順暢、適 當的抓握動作。從不同工作限制(質地、大小)的結果比較發現,嬰幼兒抓握 動作的發展,除了受年齡的因素影響外,工作限制也是影響嬰幼兒抓握動作 產生的重要因素。
Liu (1997) 藉由真實比賽情境使用之籃球與飛鏢的投擲技能,控制其不 同的距離及條件,以探討不同工作限制對投擲技能的影響情形。結果發現不 同的投擲距離與條件,會影響投擲的技能型式與穩定性。
在國內自行車相關研究,多集中於生理學與機械工程領域。Fan (2009) 以不同踩踏頻率為工作限制,對自行車坐姿騎乘的踩踏動作進行分析探討。
研究以紅外線高速攝影機及動作擷取系統蒐集騎乘時的運動學資料,再以主 成份分析(PCA)進行分析結果發現,不同的踩踏頻率會以不一樣的協調型 態完成,且有個別的差異。顯示不同的工作限制會對動作協調型態造成相當 的影響。
13
二、 主成份分析(principal component analysis, PCA)相關研究
在統計學上是將變異情形類似的變項分類,使能夠只以少數的成份就可 以代表許許多多彼此有關的變項之結構,是一件經濟有效的工具(林清山 1986)。人體肢段的活動受到身體自然結構的限制而存在著關聯性,動作學習 的目的,就在於使眾多的自由度得以組織進而達到協調,Bernstein(1967)
提出動作協調就是控制多餘的自由度,其中之一的方法就是建立元素間的關 係(陳秀惠,2005)。因此,無論是人體天生的結構或是後天的學習都會賦予 或改變動作中的協調結構。基於此論,動作行為的研究似乎能夠利用 PCA 來 進行資料的縮減。在主成份分析中有兩種分析法,一種為 Covariance matrix
(共變數矩陣,COV) 另一種是 Correlation matrix(相關矩陣,CORR),
兩者關係是後者是前者各變項的變異量再除以其標準差。兩者所得的結果有 所不同,共變數矩陣最主要的變異會來自動作位移較大的肢段,而相關矩陣 因標準化的關係,移動較小的肢段則有機會被歸類到主要的變異來源。
Haken (1996) 以主成份分析踩板車 (pedalo) 操作動作的全身性動作型 態,並且指出如果經過充分的練習後,該項動作協調與控制的維度將會縮減 至一個成份。Daffertshofer, Lamoth, Meijer 與 Beek (2004) 在 PCA 研究協調 和變異的研究中,以個案的方式分析原地跑步機上步行的運動學和肌電圖 (EMG) 訊號,並認為主份分析是可行的檢驗方式用以運動學參數與肌電訊號 (EMG) 資料的分析,從中找出少數具有代表性的協調型態,作為深入分析的 起點。
Hong 與 Newell (2006) 以主成份分析五 5 位參加者學習使用滑雪模擬 機過程中下肢左、右邊髖、膝、踝共 18 維的運動學參數。結果練習前、後前 三成份平均總解釋量由 90.2%增加至 94.6%。參加者個別的前三成份總解釋 量也是增加,但在前兩個成份個別解釋量在練習前、後增加或減少則有個別 差異存在。
Chen, Liu, Mayer-Kress, 與 Newell (2005)以 4 名(1 位女性、3 位男性)
平均年齡 21 歲的成年人進行踩板車的實驗,7 天共進行 350 次的詴作。以 2 台紅外線高速攝影機,採樣頻率為 60Hz,蒐集參加者全身 13 個位置與踩板 車兩邊前端 2 點,共 15 個位置(45 維)的運動學參數。接著透過型態的差 異、動作時間的學習曲線進行詴配與以運動學參數進行主成份分析,探討多 生物自由度協調工作的學習函數與動作協調。其中主成份分析的結果顯示學 習初期有 5 至 6 個大於 1 的特徵值總解釋變異量為 93.5%,學習後有 4 至 5
14
個大於 1 的特徵值總解釋變異量增加為 94.5%。第一成份平均解釋量增加:
由 54.2%增加至 60.1%,但個別第一成份解釋量學習前後有 2 位參加者增加 2 位減少,並無一定的趨勢,第二成份也具相同的現象。
陳秀惠(2005)收集 1 位參加者踩板車詴作全身 15 個肢段的三維座標資 料進行主成份析(PCA),以檢驗主成份分析法來簡化全身行協調眾多維度資 料之可行性。結果經過主成份的分析原本 45 維的變項簡化成三至五個,第一 與第二成份所代表的都較初學時增加,解釋量達 90%,而在學習前後,成份 間會有解釋量重新分配的情形;實驗結果指出自由度的調控似乎是由凍結到 釋放的過程,且認為主成份分析法對於複雜肢段協調的量化應該是一個可行 的分析工具。
陳秀惠與劉有德(2007)以 4 名實驗參加者,平均年齡 19 歲,平均身高 171 公分,學習兩手丟三球技能,每回合練習的時間為 30 分鐘,每位參加者 至少練習 16 回合,每回合練習中有動作資料擷取的詴作與練習的詴作。記錄 過程中的接球數和以 4 台高速攝影機蒐集兩肩、肘、腕、髖關節運動學資料,
擷取頻率為 120Hz。經過學習,代表動作協調的成份數由 3 個增加到 4 至 5 個,主要成份的解釋量也有顯著的變化。從主成份分析的結果中可看出動作 協調的自由度隨著技能的熟練而增加。由標記點變項和各成份的關係發現球 與各成份的係數值隨著練習有逐漸分散的現象,同時與手和肢段標記點變項 的分屬不同成分。代表經過練習,球的拋接有較明顯的時間結構,且肢段間 的協調型態由受球控制,轉變成較小幅度且獨立穩定型態。隨著技能的純熟,
自由度出現由凍結至釋放的過程 (Bernstein, 1967)。
Chen 與 Daffertshofer (2009) 以 2 男 2 女,共 4 人為實驗參加者,以紅 外線高速攝影機 2 台,擷取頻率 120Hz,記錄踩板車學習過程及之後上坡或 下坡的遷移測驗全身運動學參數,以主成份分析進行分析,並且使用相關矩 陣進行,結果在學習與保留三種情況下特徵值大於 1 的成份都是 8 個,且解 釋量也並無太大的差別。透過成份分數與成份矩陣顯示第一成份的成份動作 為描述踩板車動作的基本型態,第二成份反應學習過程動作協調型態的改變,
且成份分數有效值 (effective value) 的變化與動作時間進行相關考驗後呈現 四位參加者中有三位呈現 .80 以上的高相關。
戴遠成與劉有德(2007)以平衡板的學習過程探討工作限制對動作協調 型態產生所造成的差異。將參加者在二種不同限制下學習過程前、中、後測 的運動學參數進行主成份分析後發現在解釋量、與每一成份中所包含上下半
15
身肢段的數目都有所不同。戴遠成(2008)以 Bernstein (1967) 所提出自由 度的問題當成其探討的出發點,用 8 位大學女生作為實驗參加者。在練習的 時段要求參加者雙手握持橫木槓站立於動態平衡台,並且盡量維持水平的姿 勢。每天 20 次詴作練習,每次詴作 30 秒,共計 6 天 (120 次詴作) 的練習。
以 4 部高速攝影機以 60Hz 取樣速度,擷取全身肢段 17 個點的三維座標運 動學參數。採用主成份分析進行分析。研究結果中缺乏充分的證據可以支持 Bernstein (1967) 所提及的凍結與釋放自由度假說。人體全身多肢段中眾多機 械自由度會以自我組織的方式,縮減成少數幾個動態自由度來獲得解決。運 動學習過程中,練習不但會改變全身多肢段可控制的維度的數量,而且還會 導致其相關變數解釋量的轉變。最後此研究發現顯示,複雜的運動行為其機 械自由度的招募與壓縮會深受工作、個體與環境多重限制的交互作用影響,
同樣地動態自由度的時間空間組織也會因這些限制而改變。
三、 學習曲線相關研究
學習曲線是最早用來說明經練習動作改變過程的一種方式。方法為先找 到一個觀察變項,然後將它隨著時間序列變化一一的記錄下來,繪製成為一 條曲線,以這一條曲線代表運動學習的過程和變化,透過以數學函數對曲線 進行詴配來解釋運動學習。在過去觀察的變項多以平均的結果表現為主,所 以無法反映學習的情形,這樣的分析方式無法由其中得到比較有意義的訊息。
由於動力系統理論的發展,對於學習曲線的分析開始有不同於以往的方法與 結果。
Chen (2001)以踩板車和虛擬排球兩個實驗以動力系統理論為基礎建構運 動學習曲線的理論與分析方法,對運動學習過程中動力系統所提的現象,如 何由學習曲線量化之,提出了說明。廖庭儀與劉有德(2003)以不同初始速 度觀察學習者進行搖搖球運動的學習表現。並根據動力系統理論將學習過程 區分為轉移前、中、後三階段。結果顯示,轉移前以對數和指數函數適配並 無差異,轉移後以指數函數適配較為合適。與動力系統理論的預測符合,顯 示轉移後動作型態較穩定(接近吸引子),並且在轉移中觀察到擴大變異的現 象,支持動力系統中狀態轉移時的分歧現象。Liu, Mayer, 與 Newell (2006) 以搖搖球透過學習曲線更深入的探討學習過程質與量的轉變,型態轉變時分 歧、與吸引子的行為。
陳秀惠與劉有德(2007)以指數函數和對數函數就二手丟三球學習過程 接球數曲線和時間結構曲線進行適配,並且對動作協調子系統進行主成份分
16
析。整體的接球數曲線呈現對數函數行為;而分段結果曲線中,發現的指數 函數與技能表現具有一致性,動作協調也隨著練習出現結構上的改變,證實 了整體結果曲線,會因子系統的互動及演進而呈現對數函數的行為。說明了 複雜系統的學習曲線能反映子系統間的互動和演進的過程。
四、小結
上述研究於三角限制部分實驗對象、技能、實驗的操作及目的皆不盡相 同,但卻都得到一個相當一致的概念性的結果:動作技能的學習與發展是三 個限制交互作用下的結果。運動學參數與肌電訊號(EMG)與主成份分析(PCA)
處理後,成份分數與成份係數可分別反映出動作型態與協調情形,成份數則 可對自由度的凍結與釋放進行觀察。自由度變化的情形則與Bernstein (1967) 所提出的三階段模式不盡相同,自由度的調控並非單向途徑變化。於本實驗 中參加者學習過程自由度的變化情形為何?是為本實驗觀察的重點之一。
陳秀惠(2009)指出若研究的目的在探討肢段間的關係,可考慮採用相 關矩陣,而協調最基本的意義就是指肢段間的關係。所以若欲瞭解一個動作 的協調型態或學習過程協調型態的轉變,應該是以相關矩陣進行主成份分析,
這樣動作幅度小的部位才能被涵蓋到主要成份。
要透過學習曲線得到比較真確有意義的訊息,個別學習者且逐次的曲線 是比較好的選擇。而將整體的學習按照練習的階段分開來分析,可避免不同 時間刻度累積造成的函數誤判現象(陳秀惠、劉有德,2007)。
第三節 自行車騎乘姿勢控制與動作分析 一、 姿勢控制基本概念
當個體的重心受到外力干擾或在動作執行時干擾重心,但是身體仍然能 繼續維持重心在支持底面積上,保持身體的穩定度,使得身體維持直立,不 會發生跌倒的能力,稱之為姿勢控制。Shumway 與 Horak (1986) 提出感覺策 略概念來解釋人體維持平衡控制,並且認為個體在感覺情境改變時,會以快 速地判別感覺回饋的正確性,而選擇最有效的感覺訊息以維持平衡的決策過 程(戴遠成,2008)。當人體執行運動控制時,必需仰賴許多的感覺器官來 獲得有效的訊息並且作為調節動作重要的依據。訊息來源包含:視覺 (vision)、
本體感覺 (som atosense) 與前庭覺 (vestibule) 等 (Shumway, & Horak, 1986;
Winter, 1995;戴遠成,2008) 感覺系統的輸入,而實際控制的部分則神經系 統(Neuromusclar system)與肌肉骨骼系統(Musculoskeletal system)兩大部 分執行。其中肌肉骨骼系統,是維持平衡控制次重要的一個系統。生態系統
17
(Ecological system)雖未直接參與調控,但對結果仍有相當影響。
一、 自行車騎乘時身體姿勢
自行車與騎乘者,主要的接觸位置為把手、坐墊以及腳踏。把手位置主 要是與人體手臂的支撐力與反作用力有關,而坐墊支撐臀部所承受身體的重 量,踏板則影響人體下肢有效踩踏踏板力量的輸出。由把手、坐墊與踏板這 三處位置的相互關係來看,坐墊處與把手處的相對位置直接影響軀幹關節的 角度範圍、上肢與軀幹的角度範圍以及上半身重心位置。而坐墊處與腳踏板 處的相對位置則直接影響膝關節的角度範圍,以及小腿與大腿的活動範圍。
因此,身體各關節在騎乘自行車的運動狀態中,於合適的角度範圍中操作才 能獲得最適合的操作姿勢,進而發揮最大的輸出功能。在自行車運動中,軀 幹的操作姿勢與其他身體部位的活動有著密切的關係。Brown 與 Jensen (2006) 量測騎乘自行車時人體上半身的肌電壓,發現下肢在踩踏腳踏時,下肢肌肉 活動會隨著上半身方位的變化而改變;Marras, Davis, 與 Granata (1998) 以量 測肌電壓之實驗,證明人體軀幹彎曲與旋轉,會增加脊椎附近肌肉的活動量。
由上面可以推論得知,騎乘自行車時,人體軀幹的操作姿勢與下肢運動效能 是相關的。Fan (2009) 分析五位專家選手在不同踩踏頻率下(100、110、120、
130、Max RPM)動作型態的差異。結果證明,在不同踩踏頻率的騎乘狀態 下,身體的協調型態亦有所不同。
二、 相關研究
在感覺系統部分 Barela, Jeka, 與 Clark (1999) ; Lackner, Rabin, 與 Dizio (2001) 進行觸覺識別力 (tactile sensibility) 對姿勢控制的影響研究,結果發 現探索過程中,觸覺也是可以成為調節姿勢控制的重要知覺訊息來源;生態 系統部分 Nashner (1976) 利用平衡測詴儀,分別為年輕人和老年人做橫向和 旋轉兩個方向來測詴他們對於姿勢適應的能力。實驗結果發現,老年人在一 開始上去旋轉平衡測詴儀時,發生快跌倒的次數和使用較多腓腸肌收縮的情 形比年輕人多。但反覆幾次後,使用腓腸肌收縮的次數也和年輕人差不多了,
由此可見年輕人和老年人姿勢適應的能力是相當的。因此,只要反覆的訓練 和練習,是可以增進老年人控制平衡的能力的。Gautier, Thouvarecq, 與 Larue (2008) 以測力板和高速攝影機量測體操選手和非體操選手於平衡情境改變 時身體的控制情形,發現體操選手在平衡被破壞時會使用膝關節來穩定姿勢,
迅速蹲低減少重心及關節角度的改變,而非體操選手無法迅速的反應,且是 以髖關節(先後仰再拉回)來維持動作穩定。
嚴雅婷與劉有德(2007)以 10 位,平均年齡 21.6 ± 0.9 歲的女性練習動 態平衡板,並在練習的過程中要求實驗參加者進行接球的動作。結果顯示在
18
練習動態平衡板的過程中,隨著練習的增加,平衡板的擺動振幅顯著減少且 擺動頻率顯著加快,表示參與者對平衡板的擺動更具敏感性。當平衡板稍微 偏離水平狀態時,就可偵測到失去平衡的狀況,對擺動的反應亦較迅速,因 此可在平衡板失去平衡時很快地產生反應。擺動頻率在各情境間並無顯著差 異,但在擺動振幅的部分,在反映出參與者在增加單手接球的工作時,由於 接球的動作增加了平衡板上下擺動的幅度。但增加接球工作,並不影響參與 者可快速反應平衡板失去平衡的表現。
三、 小結
姿勢控制的方式會因動作者的技能水準不同而有所不同,姿勢控制的能 力會因訓練而有所改善。且當進行操作器械性的平衡時,擺動的頻率和震幅 可以反映出動作者的技能水準。回顧過去研究多針對較簡單的系統發生能力 探討,所以本研究嘗詴以屬於個體發生的運動項目,進行不同平衡情境姿勢 控制進行探討。
自行車運動主要動作肢段與動力的來源為下肢,上身的動作、角度對騎 乘的控制與下肢的踩踏有相當影響,且騎乘的動作型態在不同的限制下也有 所不同。顯示自行車騎乘是全身性的協調,是複雜的運動系統。
第四節 肌電訊號 一、 基本概念
經由運動神經傳遞來產生動作電位,依其神經衝動頻率的改變對運動單 位(motor unit) 徵召程度之不同,而會有所謂肌肉力量、反應速度的強弱之分。
在整個肌肉收縮過程中的電位差變化,可經由儀器加以記錄分析,稱之為肌 動電流描述技術,也就是肌電圖(electromyography, EMG)。對記錄的肌電訊 號可以積分肌電圖(iEMG)與均方根值(RMS)加以處理後分析,後者則 多用於連續性運動項目的評估,在單位時間內值越大代表著運動單元的召募 越多。均方根值(RMS)呈現的連續波形訊號,由坡谷至下一個坡谷所呈現 的是肌肉放鬆-收縮-放鬆的一個過程,其振幅高低代表招募的運動單元的高 低。肌肉啟動的時宜與作用的強度都可以透過肌電訊號反應被觀察出。因此,
肌電圖訊號用於評估漸增負荷運動,可達到一定的信效度,也是個用來評估 運動能力的良好指標(王孙涵、周峻忠、林信甫,2007)。
二、 相關研究
Hontz 與 Fisher (1995) 使用肌電圖分析騎乘自行車騎乘下肢肌肉的肌 電值變化情形,實驗結果發現踩踏是有次序且重複的動作;Dorel 等(2008)
以 11 位鐵人三項的選手進行自行車非最大努力(sub-maximal)的踩踏測驗
19
同時以 EMG 對下肢 10 個肌群進行量測後,認為肌電圖對於踩踏動作,在單 位時間內肌肉的效能水平與活化的時間探討,是良好的運用。而運動生理學 觀點下的協調,為神經動作過程神經衝動的興奮,和抑制的相互配合,和協 同與肌肉在適當的時間做適當強度的收縮。包括運動單元(motor unti)招募 的數量(作用肌用力的程度)與肌肉收縮啟動的時機(用力的時間次序)。
Sparrow, Lay, 與 O’Dwyer (2007) 由動作學習與協調動力的觀點以自行車踩 踏進行同相 (in-phase)、反相(antiphase) 及 90°相(90°phase)三個相位的踩 踏,並收集運動學參數與肌電訊號對能量的消耗進行探討,發現同相的踩踏 是最經濟的。Litzenberger, Illes, Hren, Reichel, 與 Sabo (2008) 針對不同踩踏 位置的騎乘下肢肌肉作用的時序、力量進行探討,發現不同的踩踏位置會造 成下肢肌肉在收縮時時序的不同,且主要作用肌群也不一樣。
劉強、龔榮堂與相子元(2003)在其不同球棒重量對肌肉活化的影響研 究中,以肌電圖為工具,量測參加者前導手(右打者為左手、左打者為右手)
肱三頭肌(作用肌)與肱二頭肌(拮抗肌)的肌電訊號,並將兩者的肌電訊 號標準化後相除,求得作用肌與拮抗肌的比值,以此視為兩者的共收縮及肌 肉間的協調指標。同時亦發現兩者在揮棒期及擊球期,被徵召的運動單位有 順序性的現象。肱三頭肌在揮棒末期才開始徵召大量的運動單位,在擊球期 幾乎沒有被活化;肱二頭肌在揮棒初期有大量的運動單位被徵召,且在揮棒 期末期有些許的肌電訊號,在擊球期則有大量的運動單位被徵召。
吳忠芳、王予仕、黃彥鈞、王順正與王國樑(2008)探討不同橢圓機坡 度運動下肢肌群(脛前肌、腓腸肌、股直肌、股二頭肌、臀大肌)肌電訊號 與生理反應之差異。以 8 名參加者從事不同橢圓機坡度的詴驗之後計算每個 週期平均的均方根振幅(root mean square, RMS),再將每個坡度 RMS 除以最 大值,以百分比相對強度(% RMSmax)呈現,探討不同坡度的變化情形。結 果除了脛前肌會隨著橢圓機坡度的增加,% RMSmax 值呈現顯著下降的趨勢;
其他的肌群(腓腸肌、股直肌、股二頭肌、臀大肌)隨著橢圓機坡度增加,
改變下肢肌群參與情形。
三、 小結
在過往對自行車踩踏的研究中因著重的領域範疇關係,鮮少以協調的角 度切入,多是以 EMG 在搭配輸出功率、踩踏力量或攝氧等生理指標,探究 踩踏效率或肌肉動員的情形,EMG 的量測集中在身體同一側的肢段。踩踏力 量、輸出功率兩者都是各肌肉與肢段協調後產生的一個結果,透過儀器量測
20
而得,所以這樣的結果會是較總結性的。而 Brown 與 Jensen (2006)量測騎乘 自行車時人體上半身的肌電壓,發現下肢在踩踏時,下肢肌肉活動會隨著上 半身方位的變化而改變。所以自行車的踩踏雖為下肢的動作,但卻是全身性 的協調。因此本實驗嘗詴著以動作協調與控制的範疇出發,透過對自行車騎 乘時,雙腿肌群肌電訊號的測量,探討下肢的協調型態。
綜合上述運動生理學對協調的觀點與肌電反應的量測概念,動作的協調 型態似乎可以透過肌電反應加以描述。本研究以騎乘時左、右腳股直肌與股 二頭肌(互為拮抗)的肌電訊號標準化後,求得作用肌與拮抗肌的比值相除 用以反應動作者的動作協調型態;在肌電訊號處理方面將每個學習階段 RMS 除以最大值,以百分比相對強度(% RMSmax)呈現,探討不同學習階段的變 化情形。
第五節 文獻總結
運動學習的目的,主要是使動作協調的型態改變。在過去的研究中一直忽略 經由學習過程所獲得的協調型態改變(廖庭儀,2003),而且用以探討動作技能 學習,多為較簡單的系統發生能力的動作,或動作較單純的個體發生動作。目前,
運動行為學家開始著手以線性多變項 (linear multivariate) 方法來進行維度的分析
(戴遠成,2008),且技能學習過程中維度的變化是相當值得探討的重點。所以 本研究選擇相當普遍的自行車運動,且屬運動技能中較複雜的個體發生運動:嘗 詴透過自行車滾筒訓練台騎乘練習,探討工作限制對自行車技能改善的情形,及 對騎乘協調型態、控制模式的影響。並根據上述文獻探討結果,以下列方法進行 動作協調、控制的量化與分析:1.以學習曲線記錄每一位實驗參加者成功騎乘時間,
繪製個人學習曲線。並透過學習曲線檢查學習過程中分歧發生的時間,據此區分 整個過程為轉移前、中、後三個階段。2.協調型態的轉變則透過以主成份分析之相 關矩陣進行分析,並針對三階段之解釋量、成份數、成份分數、成份矩陣予以探 討。3.檢查下肢左、右兩邊之肌電訊號(EMG)在學習前、後是否有呈現不一樣 的型態。4.在自行車的平衡控制方面則嘗詴以擺動的頻率與幅度反應學習三階段的 差異。
21
第參章 研究方法與步驟
本研究採實驗研究法,研究架構、方法步驟、場地器材配置及儀器校正等相 關內容,分別詳述如下列各小節。共分六節,第一節 研究架構;第二節 研究 對象;第三節 研究工具;第四節 場地佈置;第五節 實驗流程與步驟;第六 節 資料處理與統計分析。
第一節 研究架構
本實驗研究架構如圖 3- 1 所示。參加者進行 5 天,每天 10 分鐘自行車滾筒式 訓練台的練習及一分鐘的立即表現測驗,1 週後進行保留測驗。透過蒐集動作者練 習過程、立即表現、保留之運動學參數與肌電訊號後進行分析,探討參加者協調 型態、控制模式與肌電訊號、控制能力的改變情形。
圖 3- 1 研究架構圖
自行車滾筒式訓練台騎乘練習
控制能力 1.穩定控制能力 2.穩定踩踏能力
立即 表現 保留
測驗
1.協調型態 2.控制模式 3.肌電訊號 學習曲線型態
22
第二節 研究對象
本實驗採立意取樣,參加者(n=12)條件為會騎自行車但無騎乘自行車滾筒 式訓練台經驗之體育系男性。基本資料如下(表 3-1):
表 3- 1 參加者基本資料表
編號 年齡 身高 體重 胯下長 座管高度
(BB 中心-座墊頂)
1 22 178 75 82 72.57
2 19 177 76 79 69.92
3 20 176 79 82 72.57
4 19 172 65 79 69.92
5 19 178 75 80 70.80
6 19 175 63 81 71.69
7 19 175 62 82 72.57
8 19 171 69 72 63.72
9 22 173 57 79 69.92
10 19 177 65.2 80 70.80
11 19 180 76 81 71.69
12 19 178 85 80 70.80
最大值 22 180 85 82 72.57
最小值 19 171 57 72 63.72
平均 19.58 175.83 70.6 79.75 70.58 標準差 1.16 2.72 8.28 2.70 2.39
註:胯下長測量方法如圖 3- 2。
胯下長測量方法說明如下:參加者未穿著鞋子,背部緊貼牆壁並雙腳開立與肩
同寬。以水平尺置於參加者胯下頂,一端與牆壁緊靠,一端突出與牆面垂直。接 著調整水平尺使水平氣泡居中,最後以捲尺測量水平尺突出端上緣至地面之垂直 距離,所得之垂直距離即參加者之胯下長(如圖 3- 2 實驗參加者跨下長測量方 法)。
23
圖 3- 2 實驗參加者跨下長測量方法
第三節 研究工具 一、 公路自行車
GIRS 公路自行車一台,尺寸:龍頭中心至座管中心 (C to C) (水平)55 cm,
B.B 中心至立管頂 (C to T):52.5 cm。
二、自行車滾筒式訓練台一台(圖 3- 3),規格:長 130 cm、寬 44.5 cm。
圖 3- 3 滾筒式訓練台
24
三、 Qualisys Track Manager (QTM) 動作擷取系統
用以蒐集分析騎乘過程動作者運動學資料,詳細介紹如下:
(一)Motion Capture(型號:ProReflex)高速攝影機六部(圖 3- 5),本研究 擷取頻率為 240Hz。Qualisys Track Manager 電腦軟體系統一組。
(二)反光貼球數顆(半徑 1 公分)(圖 3- 4)。
(三)L 型校正架(圖 3- 7)。
(四)T 型校正棒(圖 3- 6)
圖 3- 4 反光球 圖 3- 5 Motion Capture 高速攝影機
圖 3- 7 校正架 圖 3- 6 校正棒
圖 3- 8 硬碟式攝影機
25
四、 硬碟式攝影機(圖 3- 8)
用以記錄實驗過程,提供資料處理時動作分析時參考之依據與回顧、瞭 解實驗中發生之各項狀況。拍攝頻率為 30fps。
五、 Noraxon TeleMyo 2400T G2 肌電測量儀器(圖 3- 9)
用以擷取、處理分析肌肉活動電位的資料,本研究擷取頻率訂為 1500Hz,
詳細介紹如下:
(一)主機包含:無線傳輸卡、電極線插槽、頻道調整鈕等。
1. 無線傳輸卡:EMG 主機蒐集完肌肉活動電位的資料,透過無線傳輸卡將資 料傳送到接收器,其最大傳送範圍可達 100M。
2. 電極線插槽:目前最多可同時連接 8 條電極線。即可同時量測 8 個部位的 肌肉活動電位。
3. 頻道調整鈕:主機與訊號接收器頇使用相對應的頻道。用以找到合適的頻 道傳送及接收資料。
(二)肌電訊號接收器(PC-Interface Receiver)
包含無線傳輸卡、USB 傳輸線插槽、頻道調整鈕等。
1. 無線傳輸卡:訊號接收器透過無線傳輸卡接收最遠可達 100M 外的 EMG 主機所量測到的肌肉活動電位的資料。
2. USB 傳輸線插槽:訊號接收器藉由 USB 傳輸線,與筆記型電腦連結。當 連線完成後,研究者可於軟體觀察實驗參加者當下的肌肉活動電位的變化 情況,並進行資料的蒐集。
圖 3- 9 Noraxon TeleMyo 2400T G2 肌電測量儀