國立臺灣大學工學院土木工程學系 碩士論文
Department of Civil Engineering College of Engineering
National Taiwan University Master Thesis
應用長期連續 GPS 觀測資料於坐標參考框架變異之研究 A Study on Reference Frame Variations Based on Long-term GPS
Measurements
余徐維 Syu-Wei Yu
指導教授:韓仁毓 教授 Advisor: Prof. Jen-Yu Han
中華民國 98 年 1 月
Jan. 2009
誌謝
終於完成碩士論文了,心中的感動無可言喻,在這二年多的研究所生活中,
經歷過許多的挑戰、伴隨著是多少個失眠的夜晚,想要放棄的聲音不曾停歇過,
雖然過程中的苦悶多於歡樂,但是經過這段期間的磨練與洗禮後,著實令我成長 不少。校園的生活即將告一段落,但內心的失落遠大於喜悅,除了校園內有我所 懷念的人、事、物之外,另一個原因是即將邁向人生的另一條道路,未來是未知 的,但只有自己可以選擇將來要走怎樣的路。
能夠完成碩士學位,首先要感謝我指導教授,韓仁毓老師。在學術研究上,
他對我不辭辛勞地教導,我從他的身上學習到學術研究所應有之嚴謹態度;他同 時給了我很大的空間及彈性,讓我可以依照自己的步調朝著目標前進;在生活上,
老師經常分享他的人生經驗與生活態度,都深深地影響了我。在學業上他是我的 良師,生活中更可謂是我的益友,由衷地感謝老師在研究所生活中對我的指導與 鞭策,使我在研究與工作態度上皆有所進步與成長,您對我的付出與照顧,學生 會謹記在心。同時也要感謝林老生教授、徐百輝教授與趙鍵哲教授三位口試委員 給予我論文上的寶貴意見及建議,使學生的論文能更臻完善。還要感謝許榮欣老 師在課業上的教導與人生態度的啟發。另外,我之所以能夠繼續念研究所,必須 要感謝政大黃灝雄與詹進發教授,在大學時期帶領我從事許多關於測量相關的學 術研究,並鼓勵我往研究所的目標邁進。感謝徐百輝老師與趙鍵哲老師在我剛進 來時,教導我許多測量專業知識及在研究工作時所應注意之事項,使我獲益良多。
在研究所的生活中,首要感謝的是彭念學長以及信宏學長對我的照顧,不論 是在課業上或是生活問題上,只要向學長請教,都可以獲得最有效的回應;感謝 Kevin 學長與子毅學長平時對我的照顧及關心;琇涵學姊總是能抽空幫我解決問
題;嘉玳學姊在我遇到困難時,也會義不容辭幫忙;正楷學長在研究室經常帶來 歡樂氣氛,並謝謝你的腳踏車。此外,雅婷學姊、小個學長、匯智學長、永安學 長及子龍學長在平時的關照。
感謝昱芸,因為有妳的大力協助,才能夠完成一年級時許多困難的報告,妳 的功勞最大;感謝小花在平時課業或生活上的幫忙,並分享研究心情的苦與樂;
君芸在學業上的認真態度,可作為學習的好榜樣。博涵總是在我遇到問題時,能 夠友情相挺,很幸運能夠有你這樣的好夥伴,祝你順利畢業;奕婷學姊只要有妳 在的地方,總是能夠充滿歡樂的氛圍,湘玲平常總是笑咪咪地,讓我也感染到妳 的好心情;則元雖然平常沈默,但是也都很認真地進行研究工作;小樂、煒哲感 謝你們在我口試時的情義相挺,研究團隊有你們的加入,相信將來可以更加茁壯;
寧軒、鈺珊與璧華,雖然與妳們接觸的機會不多,但是看到妳們平常認真學習的 態度,覺得將來測量組會愈來愈好。感謝韋翰,幫助我在 Linux 資料處理上所遇 到的問題,使我能夠順利完成實驗;感謝冠豪、小原,每當我心情鬱悶時,你們 總是可以給我精神上的支持。206 室的林國峰老師、李天浩老師、宗義學長、佑蓉 與慧萱學妹,與你們在同一研究室共事,將會成為我研究生活的美好回憶。感謝 林謙如老師的耐心教導,讓我從原本的不會游泳,到現在可以學會三種泳式;感 謝雅晴在我平淡無趣的研究所生活中增添美麗的色彩;還有感謝宏君、政諭、炳 瑜、煥智、之聖、冠廷、琨懿與逸帆平時的關心,以及支持我的親朋好友們,祝 大家一切順利。當然我能夠完成研究所的學業,最要感謝的就是我的家人,我的 爸爸、媽媽和妹妹,感謝有你們的支持與陪伴,讓我可以專心完成碩士學位,將 來我會盡我的努力,朝向目標邁進,不會讓你們失望。
摘要
根據板塊運動理論,地球表面可分為數個剛體板塊,板塊之間每年以數公厘 至數公分不等之速率相互移動,因此由地表控制點位所定義之坐標參考框架也會 隨時間而變動。以往透過傳統測量方式並無法得到地表點位之連續細微變化,但 隨著現代科技的發展與衛星大地測量技術的進步,加上全球定位系統( Global Positioning System, GPS )的問世,可對地表點位進行長期連續的觀測,有效偵測地 表動態行為,進而解算出點位空間資訊。而在不同時期或使用不同測量技術經觀 測解算得到之坐標與速度場,其所依據之參考框架定義亦不盡相同,一般可透過 以相似轉換為基礎之動態框架轉換模型,對不同坐標參考框架進行轉換,使其具 有共同基準,以利後續應用。
本研究主要目的為建立一套完整的動態框架轉換模型參數估計程序,包含從 GPS 原始觀測資料的處理開始,透過完整的 GPS 定位解算以及序列資料處理流 程,以獲得高品質的地表動態資料,作為後續應用之可靠依據;並採用嚴謹的參 數估計平差模型(包含廣義平差模型與虛擬觀測平差模型),選擇合適之動態框架轉 換模型進行轉換參數估計,評估參數顯著性,在不設限參考框架變異行為的情況 下,期望能夠透過這套流程有效建立變形框架間之動態轉換關係。
根據數值成果顯示,在以台灣 GPS 衛星追蹤站 2001 年至 2007 年 RINEX 資料 作為分析基礎下,本研究所建立的序列資料處理流程能夠顯著地提升所獲得的地 表動態行為估計品質,此外由於台灣地區地表點位存在不均勻的變形行為,若以 現有動態相似轉換模型加以模式,將會降低坐標及速度場轉換品質,而動態仿射 轉換模型則因為其可以有效處理非均勻變形場,對於台灣地區動態框架轉換參數
之顯著性以及坐標、速度場之轉換品質均將有明顯助益,可做為未來在變形區域 建立動態坐標系統時之主要參考模型。
關鍵字:全球定位系統、坐標參考框架、變形分析、動態坐標框架轉換
Abstract
According to the tectonic theory, the Earth’s surface can be divided into several rigid plates which move with respect to each other with velocities from millimeters to centimeters per year. Consequently, the coordinates of ground control points defining a terrestrial reference frame will also vary with time. In the past, detecting the tiny surface movements using traditional surveying technique is not an easy task. In recent years, with the advance of space geodesy techniques and the application of the Global Positioning System ( GPS ), the dynamical behavior of the Earth’s surface can be continuously observed and precisely determined. As soon as the time-variant coordinates and velocities of ground control points can be estimated, the geometric relations between terrestrial reference frames at different epochs can be established using a time-variant reference frame transformation model.
The purpose of this study is to develop a complete procedure for establishing a time-variant reference frame transformation model. First, the high quality information for the coordinates and velocities of ground control stations are obtained by an integrated GPS data processing and time-series improvement procedure. Then a rigorous parameter estimation approach ( including a general and a unified least-squares techniques ) is proposed for estimating the parameters of different time-variant transformation models. The estimated parameters are tested for their statistical significance and the actual geometric relations between time-variant reference frames can thus be identified.
In the numerical analysis, the RINEX data from 2001 to 2007 of seven GPS tracking stations in Taiwan area has been processed and analyzed. The results show that the quality of the velocity estimations can be significantly improved by applying the proposed time-series improvement approach. Furthermore, due to the non-uniform deformations in this area, a time-variant similarity transformation model does not provide an acceptable result. On the other hand, a time-variant affine transformation model can produce a coordinate and velocity transformation of a higher quality due to its capability on modeling non-uniform deformations. Consequently, a time-variant affine transformation model can serve as an eligible candidate model especially in establishing a time-variant reference system in a deforming area.
Keywords: Global positioning system, Reference Frame, Deformation Analysis,
Time-variant Transformation.目錄
口試委員審定書 ... i
誌謝 ... ii
摘要 ... iv
Abstract... vi
目錄 ... vii
圖目錄 ... ix
表目錄 ... xi
第一章 緒論 ... 1
1-1 研究背景... 1
1-2 研究動機與目的... 9
1-3 研究方法... 10
1-4 論文架構... 12
第二章 動態框架轉換模型相關研究 ... 13
2-1 動態框架轉換模型... 13
2-2 全球性參考框架轉換之應用... 14
2-3 全球性與區域性參考框架轉換之應用... 14
第三章 動態框架轉換模型 ... 17
3-1 動態相似轉換模型( Time-variant similarity transformation model )... 17
3-1-1 數學模型 ... 17
3-1-2 參數估計方式 ... 19
a. 參數估計 ... 20
b. 參數率估計 ... 22
c. 精度估計 ... 24
3-2 動態仿射轉換模型( Time-variant affine transformation model )... 25
3-2-1 數學模型 ... 25
3-2-2 參數估計方法 ... 29
a. 參數估計 ... 29
b. 參數率估計 ... 29
c. 精度估計 ... 29
d. 主成分參數誤差傳播 ... 29
3-3 數值模擬實驗... 31
第四章 長期連續 GPS 資料處理與分析... 36
4-1 GPS 資料解算 ... 36
4-2 GPS 序列資料品質提升 ... 39
4-2-1 不連續運動偵測 ... 41
4-2-2 速度場估計 ... 42
4-2-3 粗差偵測 ... 43
4-2-4 週期訊號處理 ... 44
4-2-5 統計檢定 ... 45
4-3 序列資料品質提升範例說明... 47
第五章 實際資料數值分析成果 ... 53
5-1 台灣追蹤站坐標與速度場解算成果... 53
5-2 動態框架轉換模型參數估計... 57
5-2-1 動態框架轉換模型參數估計(全區)... 57
5-2-2 動態框架轉換模型參數估計(五站)... 61
5-3 數值成果分析... 67
第六章 結論與建議 ... 70
6-1 結論... 71
6-2 建議... 72
參考文獻 ... 74 附錄 ... I A.1 台灣追蹤站 GPS 序列資料處理詳細成果 ... I A.1.1 FLNM 站 ... I A.1.2 YMSM 站 ... III A.1.3 KDNM 站 ... IV A.1.4 KMNM 站 ...V A.1.5 MZUM 站... VII A.1.6 PKGM 站...VIII A.1.7 TMAM 站 ... IX A.2 台灣追蹤站資料品質提升前之速度場估計 ...X A.3 台灣追蹤站資料品質提升後之速度場估計 ...XV
圖目錄
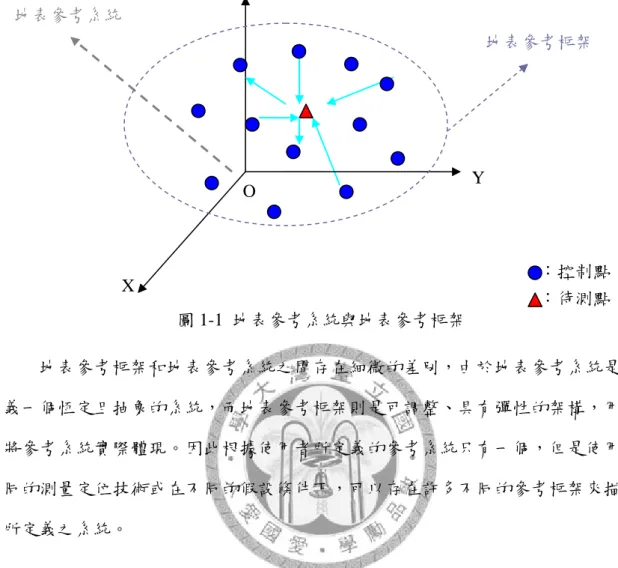
圖 1-1 地表參考系統與地表參考框架... 2
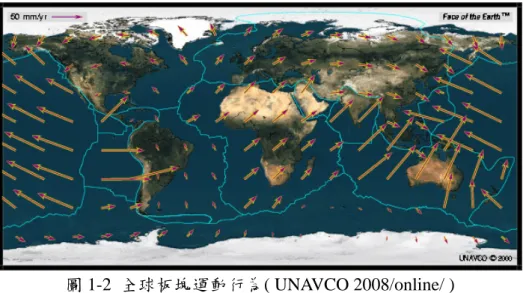
圖 1-2 全球板塊運動行為( UNAVCO 2008/online/ ) ... 7
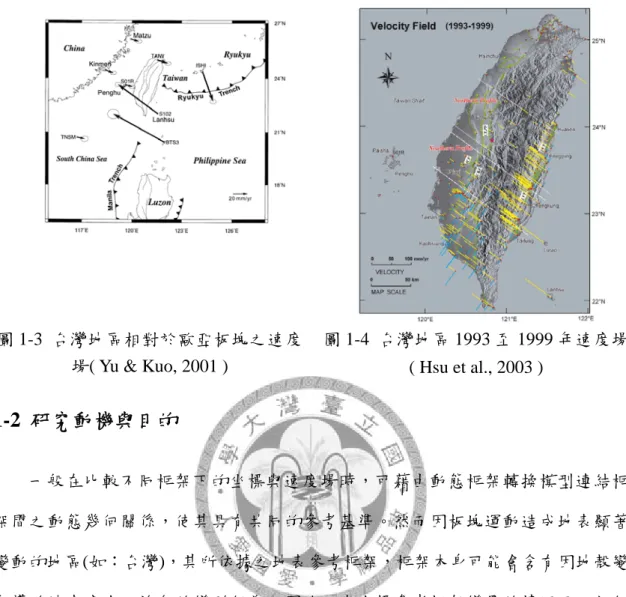
圖 1-3 台灣地區相對於歐亞板塊之速度場( Yu & Kuo, 2001 )... 9
圖 1-4 台灣地區 1993 至 1999 年速度場( Hsu et al., 2003 ) ... 9
圖 1-5 研究流程圖...11
圖 3-1-1 不同參考框架間之靜態坐標轉換 ... 18
圖 3-1-2 不同參考框架間之動態坐標轉換 ... 19
圖 3-2-1 原始點位(左)點位受到外力導致非均勻變形(右) ... 26
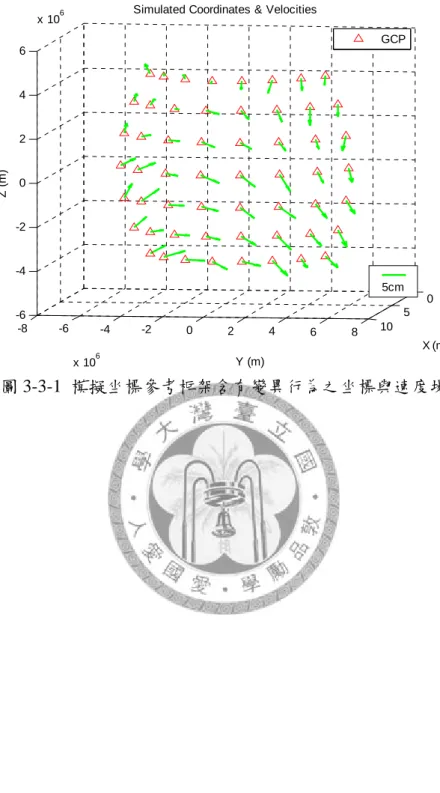
圖 3-3-1 模擬坐標參考框架含有變異行為之坐標與速度場 ... 32
圖 3-3-2 動態相似轉換模型轉換後之坐標誤差向量(左)與速度場誤差向量(右) ... 34
圖 3-3-3 動態仿射轉換模型轉換後之坐標誤差向量(左)與速度場誤差向量(右) ... 34
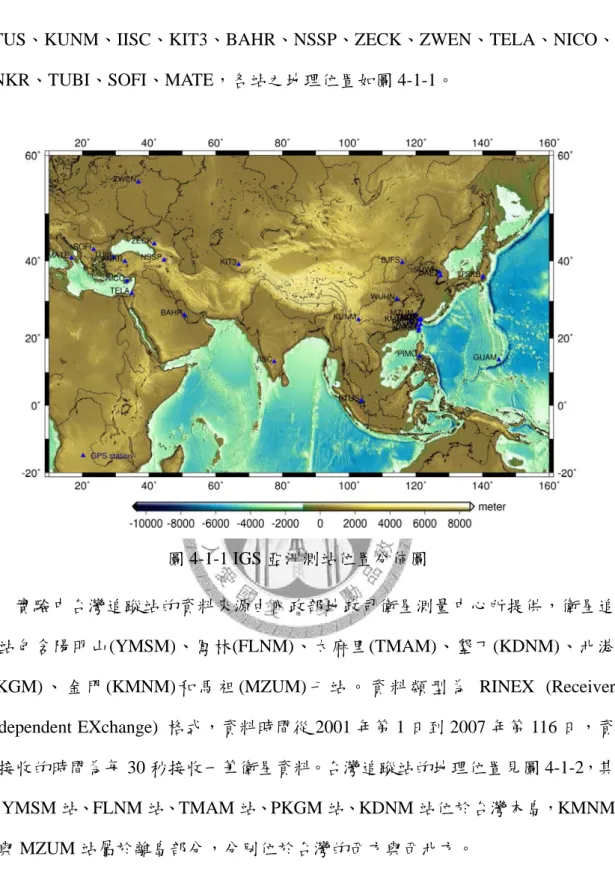
圖 4-1-1 IGS 亞洲測站位置分佈圖 ... 37
圖 4-1-2 台灣追蹤站地理位置分佈圖 ... 38
圖 4-2-1 長期連續 GPS 序列資料處理流程圖 ... 40
圖 4-3-1 原始資料速度場估計 ... 47
圖 4-3-2 原始資料殘差 ... 47
圖 4-3-3 序列資料每二點斜率估計 ... 48
圖 4-3-4 斷點偵測 ... 48
圖 4-3-5 第一段資料殘差 ... 48
圖 4-3-6 第二段資料殘差 ... 48
圖 4-3-7 第三段資料殘差 ... 48
圖 4-3-8 分段估計速度場 ... 48
圖 4-3-9 分段計算資料殘差 ... 49
圖 4-3-10 剔除第一段資料粗差 ... 49
圖 4-3-11 剔除第二段資料粗差... 49
圖 4-3-12 剔除第三段資料粗差 ... 49
圖 4-3-13 分析處理後三段資料速度場估計 ... 49
圖 4-3-14 分析處理後三段資料殘差 ... 49
圖 4-3-15 直線擬合斜率及其精度曲線圖 ... 52
圖 5-1-1 台灣追蹤站 2003 至 2007 年水平速度場 ... 56
圖 5-1-2 台灣地區 2003 至 2007 年內插水平速度場 ... 56
圖 5-1-3 台灣追蹤站 2003 至 2007 年垂直速度場 ... 56
圖 5-1-4 台灣地區 2003 至 2007 年內插垂直速度場 ... 56
圖 5-2-1-1 經動態相似轉換模型轉換後之坐標誤差(左)及速度場誤差(右)... 59
圖 5-2-1-2 經動態仿射轉換模型轉換後之坐標誤差(左)及速度場誤差(右)... 59
圖 5-2-2-1 經動態相似轉換模型轉換後之坐標誤差(左)與速度場誤差(右)... 64
圖 5-2-2-2 經動態仿射轉換模型轉換後之坐標誤差(左)與速度場誤差(右)... 64
圖 5-2-2-3 台灣地區於 ECEF 坐標系統下之三個主變形量與變形方向 ... 65
圖 5-2-2-4 台灣地區二維平面上之變形行為 ... 67 圖 A-2-1 FLNM 站於 2001 年至 2007 年之 XYZ 時間序列 ... XI 圖 A-2-2 YMSM 站於 2001 年至 2007 年之 XYZ 時間序列 ... XI 圖 A-2-3 KDNM 站於 2001 年至 2007 年之 XYZ 時間序列 ...XII 圖 A-2-4 KMNM 站於 2001 年至 2007 年之 XYZ 時間序列 ...XII 圖 A-2-5 MZUM 站於 2001 年至 2007 年之 XYZ 時間序列 ...XIII 圖 A-2-6 PKGM 站於 2001 年至 2007 年之 XYZ 時間序列...XIII 圖 A-2-7 TMAM 站於 2001 年至 2007 年之 XYZ 時間序列 ... XIV 圖 A-3-1 FLNM 站於 2001 年至 2007 年之 XYZ 時間序列 ... XVI 圖 A-3-2 YMSM 站於 2001 年至 2007 年之 XYZ 時間序列 ... XVI 圖 A-3-3 KDNM 站於 2001 年至 2007 年之 XYZ 時間序列 ... XVII 圖 A-3-4 KMNM 站於 2001 年至 2007 年之 XYZ 時間序列 ... XVII 圖 A-3-5 MZUM 站於 2001 年至 2007 年之 XYZ 時間序列 ...XVIII 圖 A-3-6 PKGM 站於 2001 年至 2007 年之 XYZ 時間序列...XVIII 圖 A-3-7 TMAM 站於 2001 年至 2007 年之 XYZ 時間序列 ... XIX
表目錄
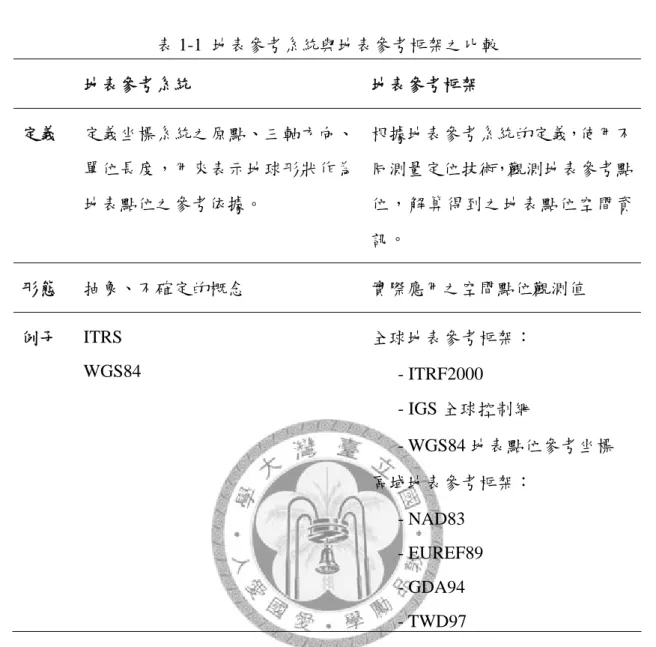
表 1-1 地表參考系統與地表參考框架之比較... 6
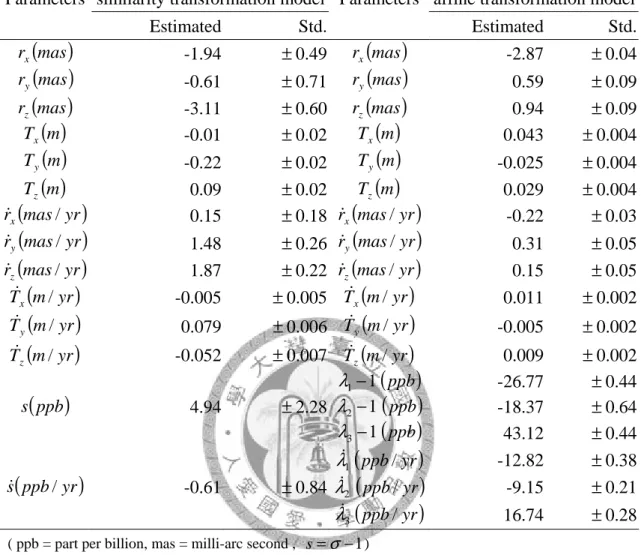
表 3-3-1 動態轉換模型參數估計成果 ... 33
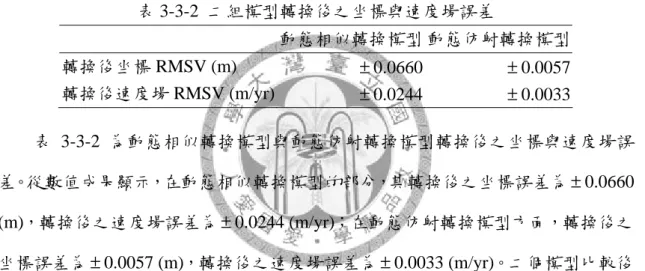
表 3-3-2 二組模型轉換後之坐標與速度場誤差 ... 35
表 4-1-1 GPS 資料介紹 ... 39
表 4-3-1 KDNM 站在 2001 年至 2007 年 Y 方向速度場估計 ... 50
表 4-3-2 台灣追蹤站 2001 至 2007 年 GPS 序列資料分析處理前後精度比較表 ... 51
表 5-1-1 台灣追蹤站在 2003.2 與 2007.1 時刻下的坐標與速度場 ... 54
表 5-2-1-1 動態轉換模型參數估計成果(全區) ... 57
表 5-2-1-2 二組動態框架轉換模型轉換後之坐標與速度場誤差 ... 59
表 5-2-2-1 動態轉換模型參數估計成果(五站) ... 62
表 5-2-2-2 二組動態框架轉換模型轉換後之坐標與速度場差誤差 ... 64 表 A-1-1-1 FLNM 站 2001 年到 2007 年 X 方向序列資料處理成果 ... I 表 A-1-1-2 FLNM 站 2001 年到 2007 年 Y 方向序列資料處理成果 ... I 表 A-1-1-3 FLNM 站 2001 年到 2007 年 Z 方向序列資料處理成果...II 表 A-1-2-1 YMSM 站 2001 年到 2007 年 X 方向序列資料處理成果 ... III 表 A-1-2-2 YMSM 站 2001 年到 2007 年 Y 方向序列資料處理成果 ... III 表 A-1-2-3 YMSM 站 2001 年到 2007 年 Z 方向序列資料處理成果... III 表 A-1-3-1 KDNM 站 2001 年到 2007 年 X 方向序列資料處理成果 ... IV 表 A-1-3-2 KDNM 站 2001 年到 2007 年 Y 方向序列資料處理成果 ... IV 表 A-1-3-3 KDNM 站 2001 年到 2007 年 Z 方向序列資料處理成果... IV 表 A-1-4-1 KMNM 站 2001 年到 2007 年 X 方向序列資料處理成果...V 表 A-1-4-2 KMNM 站 2001 年到 2007 年 Y 方向序列資料處理成果...V 表 A-1-4-3 KMNM 站 2001 年到 2007 年 Z 方向序列資料處理成果 ... VI 表 A-1-5-1 MZUM 站 2001 年到 2007 年 X 方向序列資料處理成果 ...VII 表 A-1-5-2 MZUM 站 2001 年到 2007 年 Y 方向序列資料處理成果 ...VII 表 A-1-5-3 MZUM 站 2001 年到 2007 年 Z 方向序列資料處理成果 ...VII 表 A-1-6-1 PKGM 站 2001 年到 2007 年 X 方向序列資料處理成果...VIII 表 A-1-6-2 PKGM 站 2001 年到 2007 年 Y 方向序列資料處理成果...VIII 表 A-1-6-3 PKGM 站 2001 年到 2007 年 Z 方向序列資料處理成果 ...VIII 表 A-1-7-1 TMAM 站 2001 年到 2007 年 X 方向序列資料處理成果 ... IX 表 A-1-7-2 TMAM 站 2001 年到 2007 年 Y 方向序列資料處理成果 ... IX 表 A-1-7-3 TMAM 站 2001 年到 2007 年 Z 方向序列資料處理成果 ... IX
第一章 緒論
1-1 研究背景
大地測量的主要目的之一,是盡可能準確估計地表點位的空間位置,但由於 地球並非一個規則球體,為了估計地表點位的三維空間資訊,必須要定義一個表 示 地 球 形 狀 的 參 考 系 統 作 為 地 表 點 位 的 參 考 依 據 , 因 此 衍 生 地 表 參 考 系 統 ( Terrestrial Reference System, TRS )的概念,用以描述地表點位的空間位置。然而 地表參考系統本身為一抽象的概念,在實際套用地表參考系統定義時,則需要經 由一些觀測方法及技術進而獲取控制點位的三維空間位置,並以數學模式和地表 參考系統之基本定義作連結,此即為地表參考框架( Terrestrial Reference Frame, TRF )。換言之,地表參考框架乃是利用測量技術所求出的觀測量,將地表參考系 統本身的抽象、不確定性予以具體化。地表參考系統與地表參考框架的示意圖如 圖 1-1 所示。圖 1-1 中,紅色三角點代表空間中的待測定點位,藍色圓點代表根據 地表參考系統定義,經測量技術所得到之地表控制點位,待測點位的空間位置決 定,需藉由地表控制點位以測量的方式,進而估計待測點位的坐標。
由於地表參考框架是經由地表點位的觀測量而來,當點位變動時,所定義之 框架亦會隨之改變,因此在考量地表實際動態行為的情況下,可透過全球定位系 統( Global Positioning System, GPS )對地表控制點位進行長期連續觀測,獲取地表 空間資訊,進而建立一組動態坐標參考框架用以描述框架之變動行為。然而依據 不同參考系統或不同測量技術所定義之地表參考框架,彼此間通常存有系統性的 差異,因此在實用上,可藉由動態框架轉換模型建立不同框架間之動態轉換關係。
在不同參考框架下之地表點位坐標與速度場,可透過動態框架轉換模型估計轉換 參數,經過轉換之後,而擁有共同的參考基準,進行後續之應用。
圖 1-1 地表參考系統與地表參考框架
地表參考框架和地表參考系統之間存在細微的差別,由於地表參考系統是定 義一個恆定且抽象的系統,而地表參考框架則是可調整、具有彈性的架構,用來 將參考系統實際體現。因此根據使用者所定義的參考系統只有一個,但是使用不 同的測量定位技術或在不同的假設條件下,可以存在許多不同的參考框架來描述 所定義之系統。
在分析使用大地測量技術所獲得的資料前,首先都要了解它本身地表參考系 統的定義。根據不同之坐標參考系統定義或是在同一坐標參考系統定義下,但經 由不同觀測技術的情況下,會衍生出各種不同的地表參考框架。而為使全球各地 使用者能有一共同的參考基準,國際大地測量及地球物理協會( International Union of Geodesy and Geophysics, IUGG )和國際大地測量協會( International Association of Geodesy, IAG )對在地球科學領域方面的應用上採用唯一的一組地表參考系統,
稱為國際地表參考系統( International Terrestrial Reference System, ITRS ),ITRS 的 原點定義在地球的質量中心,包括海洋與大氣;它的長度單位為公尺(SI 制),對地 心區域框架來說,尺度與 TCG ( Temps-coordonnée géocentrique )時間坐標一致 ( Altamimi et al., 2002 )。
:待測點 地表參考系統
X
Y Z
O
地表參考框架
:控制點
除了 ITRS 之外,WGS84 ( World Geodetic System of 1984 )亦是定義地表空間 位置的坐標參考系統。WGS84 坐標系統由美國國防部之 National Imagery and Mapping Agency ( NIMA )組織所建立及維護,其原點定義在地球質量中心,Z 軸與 國際地球旋轉組織( International Earth Rotation Service, IERS )所定義之慣用地球北 極( Conventional Terrestrial Pole, CTP )方向相平行,X 軸為 IERS 所定義之零子午 圈(首子午圈)相平行之參考子午面與慣用地球北極赤道平面之交線方向,Y 軸則為 與 X 軸垂直並在赤道面上而與 X、Z 軸形成右旋地心地固直角坐標系統之方向(東 經 90 度之方向) (曾清涼、儲慶美,1999)。
在選定合適之地表參考系統後,便可透過地表參考框架將地表參考系統的概 念予以實現。自 1980 年起,由於衛星大地測量技術的發展,地表點位的觀測精度 大幅提昇,依據同一地表參考系統定義所建立但具有更新技術且高品質的地表參 考框架已被逐步建立起來( Altamimi et al., 2002 )。目前最具代表性之一組動態參考 框架是源自於 IERS 所提供之國際地表參考框架( International Terrestrial Reference Frame, ITRF )。在定義 ITRF 時是採用一組基本測站所組成之全球網,該類測站之 坐標值須採用最精確之空間定位技術予以測定。在考慮點位會受地殼變動之影響 而產生坐標改變之現象,ITRF 坐標參考框架除了公佈一組地面測站坐標值之外,
還提供測站坐標變化速度場。ITRF 的基本概念是使用大地測量技術所得到的觀測 值,結合測站位置和速度場的計算,加以綜合分析,定義出一個完整的資料組。
由 於 測 量 定 位 技 術 的 日 益 精 進 , 如 : 極 長 基 線 干 涉 術 ( Very Long Baseline Interferometry, VLBI )、衛星雷射測距( Satellite Laser Ranging, SLR )、月球雷射測 距( Lunar Laser Ranging, LLR )、全球定位系統( Global Positioning System, GPS )以 及 DORIS ( Doppler Orbitography and Radiopositioning Integrated by Satellite )等多項 之高精度定位技術,其應用需要結合在一組定義良好之全球性坐標參考系統。如 不同空間定位技術所建立之各組坐標資料( Sets of Station Coordinates, SSCs ),能予 以綜合分析後,將各組之坐標成果資料合併形成一個單一之資料組,則此一包含
測站坐標與地球定向參數( Earth Orientation Parameters, EOP )之地球參考系統即可 定義完成並視為一個大地應用所需之參考框架( reference frame ) ( Altamimi et al., 2002;曾清涼、儲慶美,1999 )。
ITRF 可利用 IGS ( International GNSS Service )公佈之全球 GPS 測站之連續追 蹤資料,而 IGS 分析中心亦可採用 ITRF 所公佈之坐標進行 GPS 之軌道計算 ( Boucher & Altamimi, 1996 )。現階段當利用 GPS 進行高精度之定位應用時,由於 GPS 能夠提供公分等級之全球性測站坐標資料,因此 ITRF 之採用便顯現出其必然 性。ITRF 所使用的網形是由分佈在全球各地的測站所構成,計算出來為最準確且 最廣大的解算成果,其中 ITRF2000 控制網的測站約 800 個,分佈在全球約五百處,
其中精度比較高的測站主要分佈於北美與西歐。ITRF2000 全球框架下約有 50%的 測站位置精度優於± 1 cm,以及大約 100 個測站之速度場精度在 ± 1 mm/yr 以下 ( Altamimi et al., 2002 )。
此外,IGS 透過分佈世界各地的 GPS 測站所建構成之全球控制網,估計得到 之每週解算成果( Ferland, 2004 ),以及 World Geodetic System ( WGS84 ) ( National Imagery and Mapping Agency, 2000 )所獲得之地表點位參考坐標,亦可視為全球性 之坐標參考框架。
除了上述之全球參考框架外,區域性的地表參考框架也在世界各地逐漸建立 起來。美國於 1974 至 1986 年間進行大量的測量施測計畫後,採用了 1,500,000 個 以上之大地觀測量進行平差解算,根據解算得到之精密成果用以建立北美洲大地 基準( North American Datum of 1983, NAD83 ) ( Schwarz ed., 1989 );歐洲在 IAG 所 屬之 EUREF ( EUropean REference Frame )工作小組於 1989 年規劃 GPS 外業測量 計畫,進行為期二週的觀測,藉此建構歐洲之三維大地基準,其最後解算成果用 以定義 European Reference Frame 89 ( EUREF89 ) ( Overgaauw et al., 1994 );澳洲在 1994 年對澳洲框架網( Australian Fiducial Network )及國家基本網( Australian
National Network ),利用 GPS 測定其在 ITRF92 框架下之坐標值,另外再加上於其 它 GPS 控制網上施測 GPS 所得到之成果,共同進行平差計算,所獲得之精密坐標,
作為澳洲大地基準( Geocentric Datum of Australia 1994, GDA94 ) ( Steed, 1995 );台 灣目前所採用之地表參考框架,是內政部於 1995 年至 1997 年之間,由台灣地區 8 個衛星追蹤站聯合 51 個分佈於全球之 IGS 國際追蹤站一起進行追蹤站網形分析,
該坐標參考框架是架構於 ITRF94,並以這 8 個站的坐標作為框架,約制台灣 105 個一等衛星控制點進行網形平差,最後解算的坐標成果,用以建立台灣地區大地 基準( Taiwan Datum 1997, TWD97 ) ( Chang & Tseng, 1999; 曾清涼、儲慶美,
1999 )。這些地表坐標參考框架之目的皆是希望能夠提供該地區最精確且符合現況 之坐標參考框架,以作為求解地表空間資訊時之可靠依據。地表參考系統與地表 參考框架基本定義整理如表 1-1 所示。
表 1-1 地表參考系統與地表參考框架之比較
地表參考系統 地表參考框架
定義 定義坐標系統之原點、三軸方向、
單位長度,用來表示地球形狀作為 地表點位之參考依據。
根據地表參考系統的定義,使用不 同測量定位技術,觀測地表參考點 位,解算得到之地表點位空間資 訊。
形態 抽象、不確定的概念 實際應用之空間點位觀測值
例子 ITRS WGS84
全球地表參考框架:
- ITRF2000 - IGS 全球控制網
- WGS84 地表點位參考坐標 區域地表參考框架:
- NAD83 - EUREF89 - GDA94 - TWD97
依據板塊構造學說,地球表面可分為數個剛體板塊,地殼板塊會受到地球內 部具流性的物質帶動而相互運動,並以每年數公厘至數公分不等之速率互相移動 中,造成全球性的板塊運動,板塊之間的運動行為模式見圖 1-2,圖中紅色箭頭代 表板塊運動的速度場。由板塊運動行為可以看出,在不同區域下所受到之板塊作 用力並不一致,在不同地區的地表點位會依據所屬板塊運動的方式,而有不一樣 的動態行為,導致地表上任一點位之空間位置的變動情形亦有所差異( DeMets et al., 1990 )。
圖 1-2 全球板塊運動行為( UNAVCO 2008/online/ )
由於地表參考系統是透過地表參考框架之觀測量來予以體現,而地表參考框 架通常是由觀測所得之參考點位坐標值來定義,然而地球板塊隨時都在運動,點 位位置也隨時間而變化。近年來,由於高精度之大地測量技術應用,可偵測出地 表點位的細微變動,因此在考慮地表參考點位移動的情況下,必須加以考量地表 參考框架之時間變化,因此衍生出時間動態坐標參考框架之概念。自 1988 年起,
依據 ITRS 所定義出之 ITRF88,即以點位坐標隨時間變動的概念,加入參考點位 坐標的速度場的動態坐標框架。ITRF 其中包含速度場的資料,也就是在構成 ITRF 網形中的每一測站都具有速度向量,用來表示它由於地殼板塊運動所造成的測站 所在點位的時間相依( time-dependent )絕對位移( Soler, 1998 )。
隨著動態框架的建立,使用者可以藉由參考框架的動態行為進而推估在此參 考框架下地表點位的動態行為。前述提到地表點位會受到全球性的板塊運動影 響,導致點位位置的改變,尤其在一些板塊交接處,其地表因板塊運動導致之變 形行為更為明顯。台灣地區位處西太平洋海域歐亞板塊與菲律賓海板塊的交界 處,東南面對琉球弧溝系統( Ryukyu arc-trench system ),西臨呂宋島弧-馬尼拉海 溝系統( Luzon arc-Manila Trench system ),板塊運動的結果造成菲律賓海板塊隱沒 到歐亞板塊下方,而部分的歐亞板塊也隱沒在周遭附近因板塊運動而形成的地殼 之下( Yu et al., 1997; McIntosh et al., 2005 )。此外由於板塊運動過程之相互擠壓作
用,導致此區域明顯地殼變形與斷層活動,依近年來相關研究結果顯示,台灣地 區在東部縱谷區域每年有高達 20~30 mm 的相對運動( Yu et al., 1997 );而在台灣西 北部的苗栗三義地區,則是可明顯觀測到由板塊運動所造成的地形變化及斷層活 動( Ota et al., 2006 )。另外從台灣本島和周圍區域所發生的規模大小不一的地震,
亦可以看出地殼運動的現象,例如近年來所發生規模最大及損傷最嚴重的集集大 地震(1999 年 9 月 21 日,Mw=7.6,其中 Mw 代表地震矩規模( Moment Magnitude )),即在台灣的中部地區,沿車籠埔斷層約八十公里的周遭範圍造成顯 著的地表破裂情形( Chen et al., 2007 )。
根據台灣地區關於地殼板塊運動的相關研究顯示,在不同區域下所受到之板 塊作用力並不相同,導致地表變化有所差異,例如:在中央山脈區域每年有 18~35 mm 的相對運動,海岸山脈區域每年則有 28~68 mm 的相對運動( Yu & Kuo, 2001;
Hsu et al., 2003 )。藉由台灣地區 GPS 觀測資料解算得到之測站速度場,可獲得台 灣地區的地表運動行為模式,是屬於西北-東南方向夾縮的運動方式。圖 1-3 與圖 1-4 分別代表台灣地區相對於歐亞板塊的運動方向以及台灣地區在 1993 至 1999 年 之間的 GPS 測站速度場,從圖 1-3 與圖 1-4 即可看出台灣地表點位運動的複雜程 度,東、西部的速度場方向與大小皆有所差異。透過上述這些頻繁且活躍的板塊 運動現象證實台灣地區存在複雜的地表變形行為,由於台灣地區地表點位變動行 為顯著,連帶的,用來定義此區域地表坐標框架的參考點亦隨之變動,因此於台 灣地區建立動態框架轉換模型有其必要性。
圖 1-3 台灣地區相對於歐亞板塊之速度 場( Yu & Kuo, 2001 )
圖 1-4 台灣地區 1993 至 1999 年速度場 ( Hsu et al., 2003 )
1-2 研究動機與目的
一般在比較不同框架下的坐標與速度場時,可藉由動態框架轉換模型連結框 架間之動態幾何關係,使其具有共同的參考基準。然而因板塊運動造成地表顯著 變動的地區(如:台灣),其所依據之地表參考框架,框架本身可能會含有因地殼變 動導致地表產生不均勻的變形行為。因此,在坐標參考框架變異的情況下,如何 建立一套完整、嚴謹的動態框架轉換參數估計的處理程序,藉由合適之動態框架 轉換模型來模式框架的動態行為,進而建立框架間正確的動態幾何關係,是本研 究所要探討的重點。
目前一般常用之動態框架轉換模型,大多是以相似轉換作為基礎 (如:Soler, 1998; Altamimi et al., 2002 ),假設不同框架間僅有存在一個均勻尺度、旋轉和平移 變化的關係。然而在實際應用上,框架之間並非都是均勻縮放的尺度變化關係,
其中可能含有不同方向的非均勻變形,尤其是在因板塊運動造成地表劇烈變化的 區域,例如位於歐亞板塊與菲律賓海板塊交接處的台灣地區,或是北美板塊與太 平洋板塊之間的區域,都會因板塊運動的關係,造成不同地殼板塊上的地表點位
產生相對運動( Yu et al., 1997; Snay, 2003 ),因而導致參考框架含有變形行為。因 此,當框架間含有非均勻縮放的變形行為時,如果沒有藉由精確可靠的地表控制 資訊,及選用合適之動態框架轉換模型進行參數估計,便無法有效描述出框架間 的動態幾何關係,進而估計出正確的地表動態行為。本研究考慮實際地表可能發 生的物理現象,造成影響框架動態行為的可能原因,透過完整的 GPS 觀測資料處 理程序及嚴謹之數學模式進行動態框架轉換模型參數估計,過程中並不設限參考 框架的變形行為,進而建立正確動態框架之間的轉換關係。
1-3 研究方法
本研究首先將建立動態框架轉換模型,其中包含傳統的動態相似轉換模型與 適用於變形區域的動態仿射轉模型,並針對 GPS 序列資料進行分析與處理,提升 序列資料的品質,進而獲得較可靠之地表資訊,以應用於動態框架轉換模型估計 轉換參數。目標為建立一套完整、嚴謹的方式,進行動態框架模型的參數估計,
藉以獲得可靠的數值成果。在實際資料處理方面,以台灣追蹤站 2001 年至 2007 年的 RINEX 資料作為分析基礎,使用 GPS 資料處理軟體( GAMIT & GLOBK )進 行處理,獲得台灣追蹤站於 IGS 框架下之初步成果,並對解算得到之序列資料,
作進一步的分析,目的在提升資料品質與可靠性,作為後續參數估計之資料來源 依據。最終處理解算獲得在不同時刻下之坐標與速度場,再用來進行動態框架轉 換模型數值分析實驗,比較動態相似轉換模型與動態仿射轉換模型的轉換參數估 計成果,評估參數顯著性及轉換成果,藉此探討動態框架轉換模型的於變形框架 下之適用性。在進行參數估計時,採用嚴密的數學模式來進行平差計算,包含廣 義平差模型與虛擬觀測平差模型,避免因為使用不嚴謹之平差模式,造成參數估 計成果的不正確。本研究所進行之研究流程如圖 1-5 所示
IGS 區域框架解
IGS 全球框架解
地表點位於不同時刻下 之坐標與速度場 長期連續GPS序列資料
處理與分析 長期連續GPS
觀測量
轉換參數估計
動態相似轉換模型 動態仿射轉換模型
評估參數顯著性 評估參數顯著性
GPS 資料解算
坐標與 速度場分析
動態框架 轉換模型 參數估計
圖 1-5 研究流程圖
1-4 論文架構
本論文共分為六章。第一章緒論,介紹研究背景,研究動機與目的,並提出 研究之方法。第二章為文獻回顧,介紹動態框架轉換模型的相關研究,包含目前 常見的動態框架轉換模型及不同框架間之相關應用。第三章為動態框架轉換模 型,介紹適用於均勻縮放框架行為之動態相似轉換模型以及適用於非均勻縮放框 架變形行為之動態仿射轉換模型,以及說明參數估計時所採用之平差模式,包含 廣義平差模型與虛擬觀測平差模型,並透過數值模擬實驗比較動態相似轉換模型 與動態仿射轉換模型之間的差異,驗證模型之可行性。第四章為 GPS 資料處理與 分析,透過不連續運動、粗差偵測等方式,對長期連續 GPS 序列資料進行處理,
以提升坐標與速度場的品質,並藉由實際資料的處理範例,說明整個分析處理流 程。第五章為實際資料數值分析,針對台灣地區追蹤站在 2001 至 2007 年間 GPS 觀測資料為基礎,藉由不同動態框架轉換模型進行轉換參數估計,比較不同轉換 模型之參數顯著性及轉換成果,探討在框架含有變異行為時的模型適用性。第六 章為根據本研究的數值分析成果所作之結論及建議。
第二章 動態框架轉換模型相關研究
2-1 動態框架轉換模型
由於地球內部和外部之地質動態過程,引發地殼板塊運動,產生地殼表面的 變形行為,點位位置隨著時間的變化及板塊運動的方向,而發生位置變化。一般 傳統的靜態坐標轉換已經無法精確表達出點位坐標與地表參考框架之幾何關係。
因而衍生出動態框架轉換的數學模型,即在原本的靜態模型參數外,另外加上原 始參數的時間相依( time-dependent )變化,用來描述動態框架間坐標與速度場之轉 換關係( Han & van Gelder, 2006 )。
然而動態相似轉換模型可能因為假設條件、或是參數估計方式之不同,而導 致嚴密程度不一的轉換模型。如:Soler (1998) 假設框架間的旋轉是屬於微小變化 的情況下,並且將地表點位之動態行為假設為一線性之運動過程,點位速度場為 固定常數值,於此條件下推導轉換模型之數學式,因此在使用動態框架轉換模型 估計參數率( Parameter Rate )時,以線性運動之方式進行參數率估計。Altamimi et al.
(2002) 認為在一般正常情況下,板塊的運動過程屬於連續緩慢的行為。因此在地 表沒有劇烈變化的情形下,假設框架間之尺度微變量和旋轉量皆為微小數值,在 動態框架轉換模型的數學公式推導的過程中,將旋轉量與尺度微變量之乘積予以 忽略,對於參數估計的結果並不影響,於是根據上述的假設條件,建立動態框架 轉換模型。該模型在進行不同框架的轉換參數估計時,使用線性平差的方式,解 算轉換參數。Han & van Gelder (2006) 考慮參考點位在不同框架、不同時刻及剛體 運動情況下之動態框架轉換關係,對參數沒有進行任何假設,推導動態相似轉換 模型的數學式,以嚴謹之數學模式連結不同坐標參考框架間之動態幾何關係,並 提出不變函式( Invariant function )的概念應用於動態相似轉換模型的參數估計上,
其研究成果顯示,在嚴謹的數學模式下,不論轉換參數數值是否限定範圍,皆能 正確估計轉換參數。
2-2 全球性參考框架轉換之應用
全球性的地表參考框架可提供使用者,考量全球性地表動態行為點位之坐標 與速度場,進而獲取所需地表點位之空間資訊。依據不同測量定位技術或是不同 時期所定義之全球性參考框架,可透過動態框架轉換模型,估計不同框架間之轉 換參數,獲得框架之間的動態轉換關係。
ITRF2000 結合了從地殼板塊運動模型而來之空間大地解算成果。利用分佈全 球大約 500 個地點,包含約 800 個測站所建構之 ITRF2000 參考框架,提供了高精 度之測站資訊。近年來,國外學者透過動態框架轉換模型進行不同 ITRF 版本的轉 換參數估計,針對 ITRF2000 和 ITRF97 以及 ITRF2005 與 ITRF2000 不同框架的轉 換參數估計,獲得新舊框架之間的轉換關係( Altamimi et al., 2002; Altamimi et al., 2007 )。即便在不同參考框架下的坐標與速度場,也可以藉由轉換參數進行轉換,
獲得精確之轉換成果,依附在共同的參考基準下,進行後續應用。
2-3 全球性與區域性參考框架轉換之應用
對於使用特定區域的地表空間資訊使用者來說,採用區域坐標參考框架有時 會比全球參考框架更能夠描述該區域之地表空間資訊與動態行為模式,因為它是 針對該地區的地表形狀、板塊的運動行為模式所定義之地表參考框架,在此定義 下之地表的空間資訊,能夠比在全球框架的定義下所描述該區的地表資訊,更貼 近實際的地表現況,例如:北美的 NAD83、歐洲的 EUREF89 等。動態框架轉換 模型於全球性與區域性的地表參考框架的應用方面,如:Soler & Snay ( 2004 )針對 ITRF2000 與 NAD83 二個框架之間的坐標與速度場轉換,估計轉換參數,提供給 使用者進行轉換的參考依據。
在全球性參考框架與區域性參考框架的轉換應用方面,主要是考量整體框架 間的動態行為來進行轉換,因此框架的動態行為屬於大範圍區域。然而在框架中 的部分區域,可能無法藉由整體框架間的轉換,獲得符合該區域的點位動態資訊。
Snay (2003) 的研究中發現,位於太平洋中的小島,在水平速度場上,相對於北美 板塊,每年有高達數公分之相對位移,但使用 NAD83 與 ITRF2000 之間所估計得 到之轉換參數進行轉換,卻無法正確呈現太平洋區域中點位與北美板塊之相對運 動情形。因此針對太平洋地區的框架轉換,提出分區轉換的方式,將太平洋區域 分成二個地表參考框架,分別是位於太平洋地殼板塊( Pacific tectonic plate )的 NAD83 框架與馬里亞納地殼板塊( Mariana tectonic plate )的 NAD83 框架,之後再 用這二個區域框架分別與 ITRF2000 進行轉換,估計不同框架間轉換參數,描述框 架間之動態幾何關係。
除了大範圍的區域框架轉換外,動態框架轉換模型亦可應用於小範圍的區域 框架上。如:台灣地區定義 TWD97 作為台灣大地參考基準,點位坐標參考於 ITRF94,屬於區域性的參考框架。沈三齊(2005)針對台灣地區中,陽明山(YMSM)、
金門(KMNM)與馬祖(MZUM)三個台灣追蹤站,探討框架變換對台灣區域所造成之 影響,使用 Molodensky-Badekas 動態框架轉換模式,估計 ITRF2000 與 TWD97 於 1997.0 時刻下之轉換參數,獲得二個框架間的轉換關係。邱元宏、史天元(2008) 探討在不同版本之 ITRF 框架中的共同測站,點位絕對位置之變化情形,並就時間 因素與台灣地區 GPS 衛星追蹤站於 TWD97 之坐標成果可能因不同框架版本而造 成之系統誤差進行分析。
根據上述研究得知,動態框架轉換模型能夠有效連結不同參考框架間的動態 幾何關係,進而推估框架下地表點位的運動行為趨勢,尤其是應用於大範圍區域 的框架轉換方面,具有相當的成效。目前傳統上所採用之動態框架轉換模型大多 以相似轉換為基礎,藉由一個尺度、三個旋轉與三個平移參數及其參數率,用以 描述框架之間轉換關係。但是當地表內部發生相對不均勻的變動時,該區域所依
據之坐標參考框架,框架的動態行為勢必會跟著改變。此時,若使用動態相似轉 換模型可能無法有效建立框架間的動態關係。因此,當參考框架含有非均勻的變 形行為時,可以考慮採用適用於變形區域的動態框架轉換模型,例如:以仿射轉 換為基礎的動態框架轉換模型,該模型同時考量地表點位的變形行為及框架之間 的轉換關係,並透過主軸元素來描述不同方向的尺度變化,藉此模式框架間之變 形行為,可用於非均勻之變形區域下,建立變形框架之間的轉換關係。
第三章 動態框架轉換模型
本章主要分成三個部分,第一個部分是介紹二種目前常見之動態框架轉換模 型,第一種是適用於框架具有均勻變形行為之動態相似轉換模型,第二種是適用 於非均勻變形區域之動態仿射轉換模型;第二個部分是參數估計的部分,說明在 進行動態框架轉換模型參數估計時,所採用之嚴密平差數學模式,其中包含廣義 平差模型與虛擬觀測平差模型,以及在動態仿射轉換模型中進行參數估計時的特 徵值參數誤差傳播方式;第三部分為數值模擬實驗,假設在框架含有非均勻變形 行為的情況下,估計不同動態框架轉換模型的參數估計成果及評估模型的適用性。
3-1 動態相似轉換模型( Time-variant similarity transformation model )
3-1-1 數學模型
雖然地表參考系統的定義屬於恆常不變,但依據不同觀測技術及實際體現方 式所建立的地表參考框架之間仍會存在系統性的差異。目前在實用上多採用以相 似轉換( Similarity Transformation )為基礎的坐標轉換模型,藉以建立兩種不同框架 間之動態幾何關係。在典型的相似轉換公式中,利用七個獨立參數轉換描述在二 個參考框架所定義的尺度、旋轉和平移的關係(圖 3-1-1)。在圖 3-1-1 中,TRF-A 與 TRF-B 分別代表二個不同的坐標參考框架,其中二個框架間的轉換關係可以透過 一個均勻尺度參數、三軸的旋轉參數及二個框架原點之間的平移參數來描述。其 轉換模式可表示如(3.1.1)式。
[ ]
''
R X T X
v v v+
=
σ
(3.1.1)其中 Xv
代表點位在原始框架下的坐標向量、
X
v'代表轉換後框架下的坐標向 量,σ 代表兩框架間的尺度因子,
[ ] R
代表具有三個獨立參數r (對 X 坐標軸旋轉)、 x
r (對 Y 坐標軸旋轉)、 y r z
(對 Z 坐標軸旋轉)的旋轉矩陣,T v ' = { T x ' , T y ' , T z ' } t
代表在兩框架間原點的平移向量。
圖 3-1-1 不同參考框架間之靜態坐標轉換
靜態坐標轉換模型於實際應用上,可透過選取兩組坐標框架中之適當參考 點,以求取彼此間之轉換參數,並利用這些參數進行不同框架間點位之坐標轉換。
然而根據板塊運動理論,地表點位並非固定,會隨著時間而變動,因此其所依據 之參考框架亦會跟著改變,原本框架間屬於靜態的轉換關係,會隨著地表行為的 變動,轉變為動態框架。不同坐標參考框架之動態行為如圖 3-1-2 所示。在圖 3-1-2 中,TRF-A 與 TRF-B 分別代表不同之坐標參考框架,從
t 時刻到 t 時刻,TRF-A 0
框架與 TRF-B 框架皆有本身框架之動態行為。當考慮二個參考框架皆隨著時間而 變動時,可透過動態框架轉換模型來連結二個參考框架的動態幾何關係。X t
靜態框架轉換
Z t
Y t
z t
y t
x t
O o
A
TRF
−TRF
−B
圖 3-1-2 不同參考框架間之動態坐標轉換
為了描述框架的動態行為,可藉由對坐標轉換公式中的參數進行偏微分,得 到速度場轉換公式(3.1.2)式。
[ ] [ ]
( ) [ ]
''
'
X R R X R X T V
v &v & & v &v &v + ++
=
=
σ σ σ
(3.1.2)其中
X&
v'代表轉換後框架下的速度場,σ
&
代表尺度速率,[ ] R& 代表旋轉速率, X&v
代表轉換前框架的速度場, 'T&
v
代表平移速率。
(3.1.1)式與(3.1.2)式即代表動態相似轉換模型坐標與速度場轉換公式,作為不 同參考框架之間轉換。
3-1-2 參數估計方式
在動態相似轉換模型中,一共包含 14 個參數( 7 個參數
σ [ ] R T
v加上 7 個參數率
σ
&[ ] R& T
&v ),然而這 14 個參數並非全部獨立,因為參數率是由參數考量時間
演變而來,參數與參數率之間具有相依性( Han & van Gelder, 2006 )。假如使用最
小二乘平差法一次解算,用在(3.1.1)式與(3.1.2)式中,法方程式中的秩( rank )只有
x t
動態框架轉換
t
0Z z t
0t
0y
t
0x A
TRF
−TRF
−B
t
0X
Z t
t
0Y
t
0O o t
0X t
Y t
O t
y t
o t
z t
7,而非 14。為了避免在求解參數和參數率時有秩虧的情形發生,在本研究中使用 分段式的參數估計方式,先估計 7 個參數,再估計 7 個參數率。
a. 參數估計
根據動態相似轉換模型中的坐標轉換公式((3.1.1)式)和速度場轉換公式((3.1.2) 式),可用以進行轉換參數與參數率之估計。在坐標轉換公式中可看到等式左邊 '
X
v 為轉換後坐標向量,等式右邊的 Xv為轉換前坐標向量,二者分別代表在不同框架 下的點位坐標觀測量。由於坐標觀測量是經過測量技術獲得,而觀測量本身具有 誤差,因此在平差的過程中,應該考慮觀測量的精度,作為平差時權矩陣的參考 依據。然而一般平差常用的間接平差模型,在處理觀測量時,其觀測量的偏微分 係數矩陣須為單位矩陣,但是在動態相似轉換模型中,由於坐標轉換公式為觀測 量的非線性函式,等式二邊都含有觀測量,使用間接平差模型,勢必會將等式右 邊的觀測量視為常數,而不把它視作觀測量處理。因此從嚴謹的數學觀點來看,
應於平差的過程中同時考慮等式左右二邊之觀測量精度。所以在參數估計時,採 用廣義平差模型( General Least Squares Model ) ( Mikhail & Ackermann, 1976, pp.
110-115 )作為平差的數學模型。此模型是將轉換前後的坐標和速度場皆視為觀測 量,並考慮其精度作為平差時觀測量權矩陣之依據。它有別於一般傳統平差的處 理方式,將等式右邊的坐標觀測量視為常數,不考慮其精度,直接進行平差。廣 義平差模型在進行參數估計時,可以更完整、嚴謹地描述觀測量在平差過程中的 角色。
廣義平差模型之平差模式如下:
( ) l , x = 0
F
(3.1.3)其中
l
代表觀測量,x
代表參數。(3.1.3)式經線性化後,可得
( l v ) B d
A + + Δ =
(3.1.4)其中
l A F
∂
=∂ ,代表觀測量的偏微分係數矩陣,
x B F
∂
=∂ ,代表參數偏微
分係數矩陣,
v
代表觀測量的殘差(residuals),Δ 代表參數x
的改正數,d
代表線性 化之常數向量。將(3.1.4)式重新整理後,可得到
f B
Av
+ Δ= (3.1.5)其中
Al d
f
= − (3.1.6)廣差平差模型中權矩陣的給定方式為
( ) 1
1 −
−
==
e t
e Q AQA
W
(3.1.7)其中 Q 代表觀測量的餘因子矩陣( cofactor matrix )。
根據最小二乘平差原理,令 Wv
v t
為最小,可推導出(3.1.8)式( B t W e B ) (
Δ=B t W e f )
(3.1.8)上式可簡化為
t
N Δ =
(3.1.9)其中
N
=B T W e B
,t
=B T W e f
。t N − 1
=
Δ (3.1.10)
殘差的計算方式如(3.1.11)式
( B f )
W QA
v
=t e
− Δ+ (3.1.11)後驗單位權中誤差計算式如下:
( )
r t f W f r Wv
v t
=t e
−Δt
=
2
ˆ
0
σ
(3.1.12)其中 r 代表自由度。
b. 參數率估計
由於參數與參數率之間具有相依性,在平差的過程中,會造成法方程式秩虧 ( rank deficiency )問題,而無法一次估計所有參數與參數率( Han & van Gelder, 2006 )。因此在進行參數估計時,透過分段步驟的方式求解,先估計參數,待參數 估計完成後,再估計參數率。因此在動態相似轉換模型進行參數率估計時,除了 採用廣義平差模型,將轉換前後之速度場皆視為觀測量之外,另外再引入虛擬觀 測平差模型( Unified Least Squares Model ) ( Mikhail & Ackermann, 1976, pp.
333-342 ),也就是將在先前估計得到之參數作為虛擬觀測量,在平差的過程中,考 慮這些參數的精度。
虛擬觀測平差模型如下:
( ) l , x = 0
F
(3.1.13)其中
l
代表觀測量,x
代表參數。上式經線性化,可得
f B
Av
+ Δ= (3.1.14)其中 A 代表觀測量
l
的偏微分係數矩陣, B 代表參數x
的偏微分係數矩陣,v
代表觀測量的殘差,Δ 代表參數x
的改正數,f
=−[ F ( ) ( ) l 0,x 0
+A l
−l 0 ]
,代表線性
化後所留下之常數向量。
虛擬觀測方程式為
x
x x x f
v
−Δ=0
− = (3.1.15)其中 Δ 代表參數 的改正數,
0
(3.1.14)式與(3.1.15)式可合併改寫如(3.1.16)式
f B v
A
+ Δ= (3.1.16)其中 ⎥
⎦
⎢ ⎤
⎣
=⎡
I A A
0
0 ,
⎥
⎦
⎢ ⎤
⎣
= ⎡ v x
v v
, ⎥⎦
⎢ ⎤
⎣
⎡
= −
I
B B
,⎥
⎦
⎢ ⎤
⎣
= ⎡ f x
f f
。平差過程中的餘因子矩陣( cofactor matrix )為
⎥ ⎦
⎢ ⎤
⎣
= ⎡
Q xx
Q Q 0
0
(3.1.17)其中 Q 代表觀測量餘因子矩陣,
Q 代表參數的餘因子矩陣。 xx
經過合併推導後,餘因子矩陣可以表示為⎥ ⎦
⎢ ⎤
⎣
= ⎡
⎥ ⎦
⎢ ⎤
⎣
= ⎡
=
xx e
xx t t
e Q
Q Q
A AQA Q A
Q 0
0 0
0
(3.1.18)根據最小二乘平差原理,令 Wv
v t
為最小,經推導後可得( t e xx ) ( xx )
e
t W B B W B W N W
B
N
= = + = + (3.1.19)( t e xx x ) ( xx x )
e
t W f B W f W f t W f
B
t
= = − = − (3.1.20)參數的改正數為(3.1.21)式
( N W xx ) ( t W xx f x )
t
N = + −
=
Δ − 1 − 1
(3.1.21)其中
N
=B t W e B
,t
=B t W e f
,W 代表參數的權矩陣。 xx
殘差計算方式如(3.1.22)式
(
− Δ)
=
QA W f B
v t e
(3.1.22)其中
Q e
=AQA t
,W e
=Q e − 1
。後驗單位權中誤差為
( )
r v W v Wv
v t
+t x xx x
=
2
ˆ
0
σ
(3.1.23)其中 r 代表自由度。
c. 精度估計
根據誤差傳播原理( Mikhail & Ackermann, 1976, pp. 72-87 ),方差-協方差矩陣 ( variances-covariances matrix )的計算方式如(3.1.24)式所示。
t yx xx yx
yy = J Σ J
Σ
(3.1.24)其中Σ 代表 y 向量的方差-協方差矩陣,
yy
Σ 代表xx x
向量的方差-協方差矩陣,J 代表 yx y 對 x
的全微分係數矩陣( Jacobian matrix )。因此在廣義平差模型中的精度估計方面( Mikhail & Ackermann, 1976, pp.
116-118 ),分別如下:
參數的餘因子矩陣如(3.1.25)式
( ) ( )
1
1 1
1 1
−
−
−
− ΔΔ −
=
=
−
−
=
N
BN W B N
BN W A Q A W B N Q
e t
e t e
t
(3.1.25)
殘差的餘因子矩陣如(3.1.26)式
( )
AQ W B BQ W QA AQ W QA
AQ W B BN W W QA Q
e t e
t e
t
e t e
e t vv
ΔΔ
−
−
=
−
= 1
(3.1.26)
平差後的觀測量餘因子矩陣計算如(3.1.27)式。
vv vv
vl lv l ll
l Q Q Q Q Q Q
Q ˆ ˆ
= + + + = − (3.1.27)由於在虛擬觀測平差模型中,考慮了參數本身的精度,因此在估計參數精度 時,需要加入考慮參數精度的權矩陣( Mikhail & Ackermann, 1976, pp. 349-352 )。
參數的改正數見(3.1.21)式,經過誤差傳播公式所推導出的參數餘因子矩陣如 (3.1.28)式。
( ) − 1
ΔΔ = N + W xx
Q
(3.1.28)其中
N
代表法方程式矩陣、W 代表參數的權矩陣。 xx
3-2 動態仿射轉換模型( Time-variant affine transformation model )
3-2-1 數學模型
假設一均勻材質的物體,因為受到外力導致非均勻( non-uniform )的變形,可 以透過仿射模型來描述上述之變形行為。圖 3-2-1.代表原本規則排列的點位受到均 勻外力而導致不等向之變形,其中圖左為原始點位,圖右為點位受一外力導致點 位位置改變。從圖 3-2-1 上可以看出,原本為排列規則的點位,經過外力導致變形 後,點位的位置即跟著改變,其中點位所受到三個不同之
λ 1
,λ 2
,λ 3
變形量影響,變 形方向分別用紅色、青綠色與綠色三個向量來表示(圖 3-2-1)。動態仿射轉換模型 透過變形張量元素,描述沿著主軸方向的不同尺度變形來描述內部的變形行為,因此在描述變形行為上比相似轉換模型更具有彈性。
-30 -20 -10 0 10 20 30 -30 -20
-10 0
10 20
30
-30 -20 -10 0 10 20 30
Y (m) Original
X (m)
Z (m)
-30 -20 -10 0 10 20 30 -30
-20 -10
0 10
20 30
-30 -20 -10 0 10 20 30
Y (m) Deformation
X (m)
Z (m)
λ1-1 = -0.15 (ppb) λ2-1 = 0.05 (ppb) λ3-1 = 0.2 (ppb)
圖 3-2-1 原始點位(左)點位受到外力導致非均勻變形(右)
動態仿射轉換模型假設在一個均勻變形情況下,連結二個不同參考框架下的 坐標與速度場。模型中同時考慮了主動運動( active motion )的變形行為和被動運動 ( passive motion )的參考框架轉換行為。
假設因外力造成地表變形的情況下,藉由沿著主軸方向的不同尺度變形來描 述主動變形的行為。針對在均勻材質區域中的坐標向量,受到外力導致位置改變,
可透過變位張量( displacement tensor )矩陣來描述其變形行為( Billington & Tate, 1981 ),如(3.2.1)式。
[ ] A X
X
v v=
' (3.2.1)
其中
[ ] A
代表變位張量矩陣,它是一個滿秩( full rank )矩陣; Xv代表變形前坐 標向量,
X
v'代表變形後坐標向量。
因 為
[ ] A
為 一 個 可 逆 矩 陣 , 所 以 根 據 極 分 解 理 論 ( Polar decomposition theorem ),可分解成一個3 × 3
的對稱矩陣( symmetric matrix ),和一個正交矩陣 ( orthogonal matrix )的乘積,其物理意義表示點位的變形可藉由主動變形和剛體運 動描述。[ ] [ ][ ] A = ε A R A
(3.2.2)其中
[ ] ε A
代表3 × 3
對稱矩陣,[ ] R A
代表正交矩陣。將上式代入(3.2.1)式中,可得
[ ][ ] R X
X
vA A
vε
=
' (3.2.3)
(3.2.3)式代表由主動運動所造成的均勻變形區域中的坐標。將變形前後的坐標 視為在二個不同的框架下,套用相似轉換的公式,可得到(3.2.4)式
[ ][ ] [ ] { ' }
'
A R A s R s X T s
X
v v v+
=
ε σ
(3.2.4)其中
σ s
,[ ] R s
,T
vs
代表連接二個不同框架的相似轉換參數。將上式展開後,得
[ ] [ ] [ ] { }
[ ] [ ] [ ] [ ] [ ] [ ] [ ]
''
' '
T X R
T R X
R R
T X R R
X
s A A s
A A s
s s
s A A
v v
v v
v v v
+
=
+
=
+
=
ε
ε ε
σ
σ ε
(3.2.5)
其中
[ ] ε
=σ s [ ] ε A
,[ ] [ ][ ] R
=R A R s
,T
v'=[ ][ ] ε A R A T
vs '
。(3.2.5)式代表連結具有均勻( homogeneous )變形行為的二個不同坐標參考框架 的關係式。在此模型中,用一個單一的正交矩陣連結剛體旋轉和參考框架旋轉的 關係。由於變形所包含的對稱變形張量矩陣和因為相似轉換所造成的尺度變化也 結合在一起,變成一個對稱的張量矩陣。因此可利用上述模型的參數來描述主動 運動(由於變形所造成的)與被動運動(由不同參考框架間之轉換)行為。
另外,由於(3.2.5)式中的
[ ] ε
為一個對稱矩陣,因此可利用特徵值分解方法,將它分解成主軸元素及其所對應之特徵向量乘積,如(3.2.6)式。
[ ] [ ] [ ][ ] ε
=S T λ S
(3.2.6)其中
[ ] S
為一個3 × 3
的矩陣,它的列向量是[ ] ε
的特徵向量,[ ] λ
是由[ ] ε
的三個特徵值所構成的
![圖 3-1-2 不同參考框架間之動態坐標轉換 為了描述框架的動態行為,可藉由對坐標轉換公式中的參數進行偏微分,得 到速度場轉換公式(3.1.2)式。 [ ] [ ]( ) [ ] '''XRRXRXTVv&v&&v&v&v+++==σσσ (3.1.2) 其中 X&v '](https://thumb-ap.123doks.com/thumbv2/9libinfo/9607736.633436/32.892.145.750.144.761/不同參考框架間之動態坐標轉換為了描述框架動態行為可藉由對坐標.webp)