國立臺灣大學工學院機械工程學系 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
應用奈米金粒子布朗運動結合粒子追蹤測速之 溫度量測參數最佳化
Parametric Optimization of PTV Based Temperature Measurement by Brownian Motion of Gold Nanoparticles
林均洋 Jun-Yang Lin
指導教授:孫珍理 博士 Advisor: Chen-li Sun, Ph.D.
中華民國 106 年 6 月
June 2017
誌謝
本論文能夠完成,首先要感謝我的指導教授孫珍理教授,在這段時間的細心 指導,讓我在研究與對於人生態度皆獲益良多,感謝口試委員 Bruno Le Pioufle 教授、Martinus H. V. Werts 研究員與王翔郁教授在口試中給予許多指正與建議,
在此表示深摯的謝忱。
感謝實驗室的淞哥學長給予我許多研究上的建議與鼓勵,感謝思緯、泓毅與 菩引學長的教導與照顧,感謝志豪、邵育與家宜在研究與課業上的協助與激勵,
感謝家璿、柳橙、佳諺與昇益的散播歡笑,能與你們一起相互砥礪與成長,真的 是難得又珍貴的回憶。
感謝家人給予我的支持,讓我在求學期間可以沒有後顧之憂的專心學習,並 在我失落的時候幫我加油打氣。
最後,衷心地感謝一路上陪伴我、幫助我的人們。
林均洋 謹致 中華民國 106 年 8 月 8 日
摘要
本研究中探討利用奈米金粒子布朗運動位移推估周圍流體溫度之技術中,各 項分析參數對於誤差之影響,以獲得最佳之參數及分析策略。我們使用內含直徑 150 nm 奈米金粒子之溶液,在不同的流體溫度與粒子密度下,拍攝並記錄粒子之 布朗運動影像,影像中粒子之直徑約為 11 px,並使用粒子追蹤測速法分析其位 移以估算流體溫度,進而探討觀察時間、時間間隔與方均位移量等參數對溫度估 算系統誤差與隨機誤差之影響,並找出最佳參數。
實驗之結果顯示,粒子密度對於溫度估算之系統誤差與隨機誤差並沒有明顯 影響。但當粒子密度小於 108 ml-1,觀察時間為 10 s 時,粒子運動較不易產生影 像重疊的情況,較適合進行溫度估算。當方均根位移量 (RMSD) 小於 1.5 px 時,pixel locking 現象會造成較大的溫度估算系統誤差與隨機誤差,但若增加 RMSD 或影像數量,則可有效降低 pixel locking 現象之影響;當 RMSD 介於 1.5 至 2 px 時,溫度估算之系統誤差有最小值。當 RMSD 大於 2 px 時,在固定觀察 時間條件下,RMSD 越大即代表時間間隔較大,影像數量減少,誤差主要受到影 像數量減少之影響而變大。但若在固定影像數量條件下,則 RMSD 小於 1.3 px 時,隨著 RMSD 增加,pixel locking 之影響變小,使溫度估算之系統誤差減少。
固定觀察時間下,當時間間隔為 0.06 s 時,溫度估算之總不確定性有最小值;固 定影像數量下,當時間間隔為 0.08 s 時,溫度估算之總不確定性有最小值。
從實驗結果可歸納出,當觀察時間為 10 s 時,最佳 RMSD 介於 1.5 至 2 px 之間,可使 pixel locking 之影響降到最低,同時獲得足夠的影像數量,而當影像 數量大於 166 時,溫度估算有較小之隨機誤差。最佳粒子密度介於 105 ml-1與 108 ml-1間,此時粒子運動不易產生影像重疊,且影像中有足夠的粒子可供分析。
中文關鍵字:溫度量測、奈米金粒子、布朗運動、粒子追蹤測速
Abstract
In this study, we explore the accuracy of using Brownian motion of gold nanoparticles to quantify the temperature of surrounding fluid. By employing the
particle tracking velocimetry (PTV), the displacement of gold nanoparticles is measured and used to estimate the temperature through Einstein’s theory. In the image, the
diameter of each particle is approximately 8 px. Influences of the tracking time, time interval, particle density and number of frames are investigated to obtain the optimal parameters, which minimize the total error.
The experimental results show that particle density plays a minor role in the temperature estimation. Nonetheless, particle density lower than 10-8 ml-1 is recommended in order to avoid overlap of particles. When the root mean squared displacement (RMSD) is smaller than 1.5 pixels, pixel locking is more severe, which leads to higher systematic errors and random errors. However, random error can be reduced by increasing the number of frames at small RMSD. When RMSD falls between 1.5 and 2 pixels, temperature estimation has the lowest systematic error. Once RMSD exceeds 2 pixels, error is majorly influenced by number of frames. For a given tracking time, longer time interval is required to obtain larger RMSD, which results in fewer images. Hence, both systematic and random error raise with the increase of RMSD.
For a given number of frames, on the other hands, systematic errors are nearly independent of RMSD if RMSD is larger than 1.3 pixel. Due to influence of pixel locking, systematic errors decreases with increasing RMSD if RMSD is smaller than 1.3 pixel. When tracking time is fixed, the optimal time interval is 0.06 s. When the number of frames is fixed, the optimal time interval is 0.08 s.
In summary, the optimal RMSD falls between 1.5 and 2 pixels for a tracking time of 10s, so that number of frames are sufficient and the effect of pixel locking can be minimized. To reduced random errors, more than 166 frame should be taken with a RMSD larger than 1.5 pixel and smaller than 2 pixel.
Keywords: temperature measurements, gold nanoparticles, Brownian motion, particle tracking velocimetry
目錄
摘要 ... i
Abstract ... ii
目錄 ... iv
符號索引 ... vii
圖目錄 ... ix
表目錄 ... xiv
第一章 導論 ... 1
1.1 前言 ... 1
1.2 Brownian motion ... 2
1.3 文獻回顧 ... 4
溫度量測方式 ... 4
微觀尺度之溫度量測技術 ... 5
利用 Brownian motion 之溫度量測 ... 6
質點追蹤之位置分析 ... 7
1.4 研究目的 ... 8
第二章 實驗架構及不確定性分析 ... 10
2.1 實驗架構 ... 10
試片 ... 10
溫度控制平台 ... 11
影像擷取系統 ... 12
2.2 實驗程序 ... 13
2.3 不確定性分析 ... 17
奈米金溶液粒子密度之相對不確定性 ... 18
微腔體內工作流體溫度量測之相對不確定性 ... 19
粒子位移量之不確定性 ... 19
MSD 之相對不確定性 ... 20
粒子方均根位移量之不確定性 ... 21
粒徑量測之相對不確定性 ... 22
工作流體黏滯係數之相對不確定性 ... 22
微腔體內工作流體溫度估算之相對不確定性 ... 22
微腔體深度量測之相對不確定性 ... 23
第三章 實驗結果 ... 24
3.1 粒子位移量機率密度函數與 MSD ... 24
粒子位移量 PDF ... 24
MSD 與時間間隔之關係 ... 25
3.2 時間間隔對溫度估算誤差之影響 ... 25
系統性誤差 ... 25
隨機誤差 ... 26
3.3 觀察時間長度對溫度估算誤差之影響 ... 27
系統性誤差 ... 27
隨機誤差 ... 28
3.4 粒子影像重疊率計算 ... 29
3.5 粒子密度對溫度估算之影響 ... 30
3.6 RMSD 對溫度估算之影響 ... 31
系統性誤差 ... 31
隨機誤差 ... 32
3.7 溶液溫度對溫度估算之影響 ... 32
3.8 固定時間間隔與固定影像數量之比較 ... 33
系統性誤差 ... 33
隨機誤差 ... 34
總不確定性 ... 35
3.9 物鏡放大倍率之影響 ... 36
第四章 結論與建議 ... 37
4.1 結論 ... 37
4.2 建議 ... 39
參考文獻 ... 41
符號索引
D 粒子之擴散係數 (diffusivity),m s2 1
DOC 物鏡之相關景深 (depth of correlation),m DOF 物鏡之景深 (depth of field),m
e 高速攝影機像素點間的實際間距 (spacing between pixels),m k 量測之位移資料個數 (number of data)
k B 波茲曼常數 (Boltzmann constant),J K -1 M 物鏡放大倍率(Magnification of objective)
MSD 粒子在二維平面之方均位移 (2-D mean square displacement of the particle),m2
N 粒子之個數 (number of particles)
Nc 平均影像重疊次數 (average overlap rate )
Nf 分析時所使用之影像數量 (number of frames),frames
p 進行曲線耦合時所使用的像素數量 (number of pixel used in regression)
r c 有效碰撞半徑 (effective collision radius),m r p 粒子半徑 (radius),m
r img 粒子之影像半徑 (radius of particle image),m
RMSD 粒子之方均根位移量 (root mean square displacement),m
r 粒子在二維平面之位移 (2-D displacement of the particle),m2 t 時間 (time),s
t tr 實驗觀察之時間總長度 (tracking time),s
t 每次觀察之時間間隔 (observation time interval),s T 粒子之絕對溫度 (temperature of particle),K
T e 奈米金溶液之估算溫度 (temperature estimation),°C Ti 奈米金溶液之給定溫度 (imposed temperature),°C δT 溫度估算之隨機誤差 (random error),°C rand
δT sys 溫度估算之系統性誤差 (systematic error),°C
x 粒子在 x 方向上之位置 (x-position of the particle),m
[px]
x 粒子在 x 方向上之位置 (x-position of the particle),pixel
x 粒子在 x 方向上之位移 (x-displacement of the particle),m2
[px]
x 粒子在 x 方向上之位移 (x-displacement of the particle),pixel
y 粒子在 y 方向上之位移 (y-displacement of the particle),m2
[px]
y 粒子在 y 方向上之位移 (y-displacement of the particle),pixel
希臘符號
粒子之阻力係數 (drag coefficient)
流體之黏滯係數 (viscosity),kg s1m1
c 粒子密度之臨界值 (critical density of particle),m-3
p 奈米金溶液之粒子密度 (particle density of gold nanoparticles),ml1
有效碰撞截面積 (effective collision area),m2
圖目錄
圖 2.1 實驗架構圖 ... 48
圖 2.2 試片製作程序 ... 49
圖 2.3 試片上視圖 ... 50
圖 2.4 加熱平台與試片示意圖 ... 50
圖 2.5 不同粒子密度下拍攝之影像 ... 51
圖 2.6 粒子之原始影像與處理後之影像 ... 51
圖 2.7 不同溫度下,使用不同數量資料點進行 Gaussian fit 分析之 (a) 系統誤差與 (b) 隨機誤差 ... 52
圖 2.8 粒子位置分析示意圖 (a) x 方向上影像強度 array 與回歸分析所得之擬合曲 線 (b) y 方向上影像強度 array 與回歸分析所得之擬合曲線... 53
圖 2.9 粒子位置分析與溫度估算流程圖 ... 54
圖 3.1 不同溫度下,粒子在 x 與 y 方向之位移量分佈圖,時間間隔t= 0.01 s,觀 察時間t = 10 s,粒子密度tr p= 105 ml-1 ... 55
圖 3.2 不同溫度下,粒子在 x 與 y 方向之位移量分佈圖,時間間隔t= 0.01 s, 觀察時間t = 10 s,粒子密度tr p= 108 ml-1 ... 56
圖 3.3 不同溫度下,粒子在 x 與 y 方向之位移量分佈圖,時間間隔t= 0.06 s, 觀察時間t = 10 s,粒子密度tr p= 105 ml-1 ... 57
圖 3.4 不同溫度下,粒子在 x 與 y 方向之位移量分佈圖,時間間隔t= 0.06 s, 觀察時間t = 10 s,粒子密度tr = 10p 5 ml-1 ... 58
圖 3.5 不同溫度下,粒子在 x 與 y 方向之位移量分佈圖,時間間隔t= 0.02 s, 觀察時間t = 10 s,粒子密度tr = 10p 5 ml-1 ... 59 圖 3.6 不同溫度下,粒子在 x 與 y 方向之位移量分佈圖,時間間隔t= 0.2 s,觀
察時間t = 10 s,粒子密度tr = 10p 5 ml-1 ... 60
圖 3.7 Ti = 30°C 時,MSD 與時間間隔t之間的關係 ... 61
圖 3.8 Ti = 35°C 時,MSD 與時間間隔t之間的關係 ... 61
圖 3.9 Ti = 40°C 時,MSD 與時間間隔t之間的關係 ... 62
圖 3.10 Ti = 50°C 時,MSD 與時間間隔t之間的關係 ... 62
圖 3.11 Ti = 60°C 時,MSD 與時間間隔t之間的關係 ... 63
圖 3.12 Ti = 70°C 時,MSD 與時間間隔t之間的關係 ... 63
圖 3.13 不同溫度下,觀察時間間隔長度對於溫度估算系統誤差之影響 (a) Ti = 30°C (b) Ti = 35°C (c) Ti = 40°C (d) Ti = 50°C (e) Ti = 60°C (f) Ti = 70°C ... 64
圖 3.14 不同溫度下,時間間隔對於溫度估算系統誤差之影響 (a) Ti = 30°C (b) Ti = 35°C (c) Ti = 40°C (d) Ti = 50°C (e) Ti = 60°C (f) Ti = 70°C ... 65
圖 3.15 不同溫度下,時間間隔對於溫度估算隨機誤差之影響 (a) Ti = 30°C (b) Ti = 35°C (c) Ti = 40°C (d) Ti = 50°C (e) Ti = 60°C (f) Ti = 70°C ... 66
圖 3.16 不同溫度下,時間間隔對於溫度估算隨機誤差之影響 (a) Ti = 30°C (b) Ti = 35°C (c) Ti = 40°C (d) Ti = 50°C (e) Ti = 60°C (f) Ti = 70°C ... 67
圖 3.17 不同粒子密度下,觀察時間對於溫度估算系統誤差之影響 (a) = 10p 5 ml-1 (b) = 10p 6 ml-1 (c) = 10p 7 ml-1 (d) = 10p 8 ml-1 ... 68
圖 3.18 粒子密度 = 10p 8 ml-1,Ti = 30°C 時 (a)不同時間下之粒子影像 (b) 觀察 時間與溫度估算系統誤差之關係 ... 69
圖 3.19 觀察時間對於溫度估算系統誤差之影響 ... 70
圖 3.20 不同粒子密度下,觀察時間對於溫度估算隨機誤差之影響(a) = 10p 5 ml- 1 (b) = 10p 6 ml-1 (c) = 10p 7 ml-1 (d) = 10p 8 ml-1 ... 71
圖 3.21 觀察時間對於溫度估算隨機誤差之影響 ... 72
圖 3.22 (a)粒子之有效碰撞半徑計算 (b)在觀察時間間隔內,有效碰撞面積劃過的 空間 ... 73
圖 3.23 不同粒子密度下,流體溫度對於溫度估算系統誤差與隨機誤差之影響 ... 74
圖 3.24 不同流體溫度下,RMSD 與溫度估算系統誤差之關係 ... 75
圖 3.25 粒子密度 =10p 5 ml-1時,RMSD 與溫度估算系統誤差之關係 ... 76
圖 3.26 粒子密度 =10p 6 ml-1時,RMSD 與溫度估算系統誤差之關係 ... 76
圖 3.27 粒子密度 =10p 7 ml-1時,RMSD 與溫度估算系統誤差之關係 ... 77
圖 3.28 粒子密度 =10p 8 ml-1時,RMSD 與溫度估算系統誤差之關係 ... 77
圖 3.29 RMSD 與溫度估算系統誤差之關係 ... 78
圖 3.30 粒子密度 =10p 5 ml-1時,RMSD 與溫度估算系統誤差之關係 ... 79
圖 3.31 粒子密度 =10p 6 ml-1時,RMSD 與溫度估算系統誤差之關係 ... 79
圖 3.32 粒子密度 =10p 7 ml-1時,RMSD 與溫度估算系統誤差之關係 ... 80
圖 3.33 粒子密度 =10p 8 ml-1時,RMSD 與溫度估算系統誤差之關係 ... 80
圖 3.34 RMSD 與溫度估算系統誤差之關係 ... 81
圖 3.35 不同流體溫度下,RMSD 與溫度估算隨機誤差之關係 ... 82
圖 3.36 粒子密度 =10p 5 ml-1時,RMSD 與溫度估算隨機誤差之關係 ... 83
圖 3.37 粒子密度 =10p 6 ml-1時,RMSD 與溫度估算隨機誤差之關係 ... 83
圖 3.38 粒子密度 =10p 7 ml-1時,RMSD 與溫度估算隨機誤差之關係 ... 84
圖 3.39 粒子密度 =10p 8 ml-1時,RMSD 與溫度估算隨機誤差之關係 ... 84
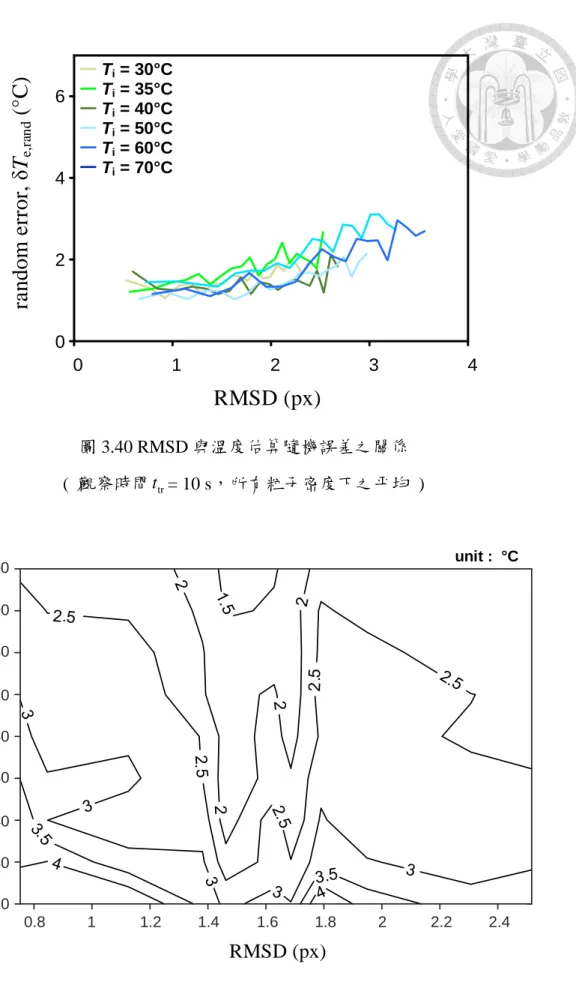
圖 3.40 RMSD 與溫度估算隨機誤差之關係 ... 85
圖 3.41 RMSD、影像數量與溫度估算隨機誤差之關係 ... 85 圖 3.42 粒子密度 =10p 5 ml-1時,觀察時間間隔與流體溫度對於溫度估算系統誤 差之影響( 觀察時間t = 10 s ) ... 86 tr 圖 3.43 粒子密度 =10p 6 ml-1時,觀察時間間隔與流體溫度對於溫度估算系統誤 差之影響( 觀察時間t = 10 s ) ... 86 tr 圖 3.44 粒子密度 =10p 7 ml-1時,觀察時間間隔與流體溫度對於溫度估算系統誤 差之影響 ( 觀察時間t = 10 s ) ... 87 tr
圖 3.45 粒子密度 =10p 8 ml-1時,觀察時間間隔與流體溫度對於溫度估算系統誤 差之影響 ... 87 圖 3.46 粒子密度 =10p 5 ml-1時,觀察時間間隔與流體溫度對於溫度估算系統誤 差之影響 ... 88 圖 3.47 粒子密度 =10p 6 ml-1時,觀察時間間隔與流體溫度對於溫度估算系統誤 差之影響 ... 88 圖 3.48 粒子密度 =10p 7 ml-1時,觀察時間間隔與流體溫度對於溫度估算系統誤 差之影響 ... 89 圖 3.49 粒子密度 =10p 8 ml-1時,觀察時間間隔與流體溫度對於溫度估算系統誤 差之影響 ... 89 圖 3.50 粒子密度 =10p 5 ml-1時,觀察時間間隔與流體溫度對於溫度估算隨機誤 差之影響 ... 90 圖 3.51 粒子密度 =10p 6 ml-1時,觀察時間間隔與流體溫度對於溫度估算隨機誤 差之影響 ... 90 圖 3.52 粒子密度 =10p 7 ml-1時,觀察時間間隔與流體溫度對於溫度估算隨機誤 差之影響 ... 91 圖 3.53 粒子密度 =10p 8 ml-1時,觀察時間間隔與流體溫度對於溫度估算隨機誤 差之影響 ... 91 圖 3.54 粒子密度 =10p 5 ml-1時,觀察時間間隔與流體溫度對於溫度估算隨機誤 差之影響 ... 92 圖 3.55 粒子密度 =10p 6 ml-1時,觀察時間間隔與流體溫度對於溫度估算隨機誤 差之影響 ... 92 圖 3.56 粒子密度 =10p 7 ml-1時,觀察時間間隔與流體溫度對於溫度估算隨機誤 差之影響 ... 93 圖 3.57 粒子密度 =10p 8 ml-1時,觀察時間間隔與流體溫度對於溫度估算隨機誤
差之影響 ... 93
圖 3.58 不同粒子密度下,流體溫度對於溫度估算系統誤差之影響 ... 94
圖 3.59 不同粒子密度下,觀察時間間隔長度對於溫度估算系統誤差之影響 ... 95
圖 3.60 不同粒子密度下,時間間隔對於溫度估算系統誤差之影響 ... 96
圖 3.61 時間間隔對於溫度估算系統誤差之影響 ... 97
圖 3.62 不同粒子密度下,時間間隔對於隨機誤差之影響 ... 98
圖 3.63 不同粒子密度下,時間間隔對於隨機誤差之影響 ... 99
圖 3.64 時間間隔長度對於隨機誤差之影響 ... 100
圖 3.65 時間間隔對溫度估算不確定性、隨機誤差與系統誤差之影響 ... 101
圖 3.66 時間間隔對溫度估算不確定性、隨機誤差與系統誤差之影響 ... 101
圖 3.67 使用 5 倍物鏡,RMSD 對溫度估算系統誤差之影響 ... 102
圖 3.68 使用 10 倍物鏡,RMSD 對溫度估算系統誤差之影響 ... 102
表目錄
表 2.1 不同粒子密度下,奈米金溶液粒子密度之不確定性 ... 46
表 3.1 不同溫度之流體黏滯係數、粒子擴散係數 ... 46
表 3.2 時間間隔Δt=1 s 時,不同溫度之粒子 MSD 與 RMSD ... 47
表 3.3 不同粒子密度與溫度下,連續拍攝 10 秒,平均影像重疊次數 Nc ... 47
第一章 導論
1.1 前言
微流體技術 (microfluidics) 自 1980 年代開始,至今已發展超過 30 年,為一 結合了生物、物理、化學等多種領域的整合技術,伴隨著微機電系統技術 (microelectromechanical systems, MEMS) 也漸趨成熟,我們得以製作出具有多種 功能的微流體元件,在微觀的尺度下觀察與研究許多物理與化學以及生化反應,
並更深入的了解他們的機制。
微觀尺度下有許多反應都會受到溫度的影響,像是在聚合酶連鎖反應 (polymerase chain reaction, PCR)中,溫度即是一項非常重要的參數[1-3],因此反 應發生時,每個循環中的不同溫度階段都需要精準的溫度控制來達成較佳的反應 結果。在熱泳 (thermophoresis) 現象中,當粒子在具有溫度梯度的流體裡時,會 受到一個強度與溫度梯度成正比的熱介電泳力使粒子運動[4],常用來分析蛋白質 或分子間的相互影響[5, 6]。另外,溫度敏感突變型 (temperature-sensitive
mutant) 生物因為其在特定溫度範圍內具有與野生型不同的基因表現,常用來研 究基因的功能[7]。多種浮游藻類的生長速率亦受到環境溫度的影響[8, 9],當溫度 超出其適合生長的範圍時即減緩或停止生長。在進行這些相關的研究時,溫度控 制是非常必要的,而透過精準的溫度量測技術,良好的溫度控制才有可能被實 現。
溫度是熱力學中重要的參數之一,同時也是工業上最常被量測的物理性質 [10],目前也已經發展出各種不同的溫度量測方式,然而當所需要觀察的範圍逐 漸縮小,解析度的需求也逐漸升高時,一般的量測技術已經無法滿足需求,因此 許多適用於微觀系統溫度量測之新技術正不斷的被開發出來,像是微機電製程製 作之微型電阻式溫度感測元件[11, 12]及具有微尖端構造之熱電偶[13]的使用。
其中利用觀察 Brownian motion 來進行溫度量測是一項新穎且優異的技術,
因其具備非侵入性的量測特性,且不像其他化學探針技術(如螢光等)可能會影響 裝置的表面性質[14],因此非常適合用於量測微流環境內部的溫度分佈,且不用 擔心會對被量測的物體或細胞造成影響。
然而目前對於該技術之參數選擇以及誤差之間的關係並不是很了解,本研究 將透過分析奈米金粒子在不同環境溫度下之 Brownian motion,來探討粒子密度、
觀察時間之間隔及長度等實驗參數對溫度量測誤差的影響。
1.2 Brownian motion
懸浮在液體或氣體中的微粒,因為受到周遭液體或氣體分子的不平衡碰撞所 造成的不規則運動,即稱為 Brownian motion。1827 年英國植物學家 Robert Brown [15]在觀察懸浮水中的花粉時,發現從花粉中迸裂出之微粒會不斷的運 動,因而發現 Brownian motion 的存在。
在進行了許多謹慎的實驗觀察之後,他們獲得了許多和動力學理論相符的結 果,並歸納出 Brownian motion 具有以下這些特性[16]:
(1) Brownian motion 由平移和轉向所構成,運動不規則且其軌跡處處不相 切。
(2) 粒子間的運動是互相獨立的,即使當粒子間的距離小於他們的半徑,亦 不受鄰近粒子影響。
(3) 粒子越小時,則 Brownian motion 越強烈。
(4) 粒子所在的流體黏滯性越小時,則 Brownian motion 越強烈。
(5) 當溫度越高時,則 Brownian motion 越強烈。
1905 年,Einstein [17] 利用熱分子動力理論,提出了 Einstein relation,其廣 義的形式如式 (1.1) 所示。
kB
= T
D (1.1)
其中 D 為粒子之擴散係數 (diffusivity) ,kB為波茲曼常數,T 為粒子之絕對溫 度, 為粒子之阻力係數。
當粒子的形狀是圓形且其運動的速度極小時,由流體力學中的 Stokes' law 可 知,粒子之阻力係數如式 (1.2) 所示。
= 6rp
ζ (1.2)
將式 (1.2) 代入 (1.1) 即可得到 Stokes-Einstein equation,如式 (1.3) 所示。
p
k 6π r
BT
D (1.3)
其中kB為波茲曼常數, T 為流體之絕對溫度,為流體之黏滯係數,為一溫度的 函數,rp為粒子之半徑。
此處,由粒子擴散方程式,並給定粒子初始為原點 (x = 0) 的條件後,可以 得到在不同的時間 t 與位置 x 下,粒子出現的機率密度函數 (probability density function, PDF),如式 (1.4) 所示。
2
( , ) 1
4π
x
f x t = e 4Dt
Dt
(1.4)
因為粒子初始位置為原點,所以末位置之值也代表位移量,由式 (1.4) 即可得到 在時間 t 時,粒子位移量為 x 之機率為常態分佈。
利用此常態分佈的關係,即可計算出時間間隔為t時,粒子在 x 方向下之方 均位移 (mean squared displacement, MSD) x2 與擴散係數之間的關係,如式 (1.5) 所示。
2 2
x D t (1.5)
由於粒子在不同方向上的運動都是互相獨立的,因此可知粒子之 Brownian motion 在二維空間中的方均位移 MSD 如式 (1.6) 所示。
2 2
i i
2 i 1 2 2
( )
MSD = 4
N
x y
r x y D t
N
(1.6)利用式 (1.3) 與式 (1.6) ,即可將二維空間中的 MSD 表示為溫度的函數,
如式 (1.7) 所示。
B p
MSD 2k
3π r T t
(1.7)
因此透過偵測二維空間中的 Brownian motion,計算粒子 MSD 的大小,即可 利用式 (1.8) 計算出流體的溫度。
p B
3π r MSD T 2k
t
(1.8)
1.3 文獻回顧
本節將回顧微觀尺度之溫度量測技術及利用 Brownian motion 之溫度量測技 術發展之相關文獻。
溫度量測方式
溫度量測多是利用偵測與溫度相關的物理或化學性質變化來進行溫度推估,
如熱電效應 (thermoelectric effect)、螢光的強度與生命期 (intensity and lifetime of fluorescence)、電阻變化 (electrical resistor change) 等。主要可將這些技術分為侵 入性、半侵入性及非侵入性三種類型[18]。
在侵入性 (invasive) 量測中,量測裝置直接接觸被量測的介質,並藉由量測
裝置與被量測介質在達到熱平衡後,藉由量測性質上的變化來推算溫度,例如熱 電偶[13, 19, 20]與熱敏電阻[11, 12]等皆是屬於此類型。
在半侵入性 (semi-invasive) 量測中,藉由在被量測的物質表面鍍 (coating) 上一層對溫度相當敏感的材料如液晶(liquid crystal) [21]等,或是在觀察區域內通 入對溫度敏感之物質如磷光 (phosphorescence) [22]、螢光 (fluorescence) [23, 24]
與雷射誘發螢光 (laser-induced fluorescence) [25, 26]等,並量測電磁波強度與生命 期 (lifetime),因此可以在不直接接觸被量測物質的情況下量測溫度。
在非侵入性 (noninvasive) 量測中,主要是量測目標物所發出電磁波或影 像,因此量測裝置不需要接觸到被量測的物質即可量測溫度,例如紅外線量測儀 (infrared radiation thermometry)[27, 28]即是屬於此類型。
微觀尺度之溫度量測技術
在微觀尺度的溫度量測技術方面,2002 年 Yamamoto 等人[11]製作出一可控 制溫度之微反應器陣列,他們利用一種可導電的玻璃-氧化銦錫 (indium tin oxide, ITO) 來製作加熱器以及電阻式溫度感測元件,並使用微型熱電偶來進行校正。
2005 年 Arata 等人[12]利用微機電製程將鎳金屬蒸鍍至玻璃表面製作電阻式溫度 感測元件。但這些微型溫度感測器只能針對特定區域進行單點量測,若要量測二 維平面的溫度場,則螢光染劑是另一種常見的方式。
2001 年,Ross 等人[23]利用一發光強度會隨溫度變化的螢光染劑來量測微流 道系統內的流體溫度,其實驗設備簡單且有良好的空間與時間解析度,缺點是螢 光染劑會因為光漂白現象 (photobleaching) 導致其發光強度隨時間逐漸減弱,而 且可能在流道中殘留對生物樣本具有毒性的物質。
封裝熱致變色液晶珠 (encapsulated beads of thermochromic liquid crystals) 可 被用於量測溫度,且具有良好的精準度。1998 年,Chaudhari 等人[21]利用封裝熱 致變色液晶珠來量測微結構內流體的溫度,其溫度量測之解析度可到 0.1°C。但
因為液晶珠本身的大小約為 0.25~1 mm,因此量測之空間解析度受到限制且無法 被使用在更微小的流道之中。
利用 Brownian motion 之溫度量測
目前利用觀察 Brownian motion 來量測溫度的技術主要有三種,分別是質點 影像測速法 (Particle Image Velocimetry, PIV)、質點追蹤測速法 (Particle Tracking Velocimetry, PTV) 及低影像密度質點影像測速法 (Low Image Density Particle Image Velocimetry, LID-PIV)。
質點影像測速法是一種流場量測技術,具備良好的精準度以及非侵入式測量 的特性,因此應用非常廣泛。當我們所要觀察的流場流速非常低且流體中粒子的 粒徑又相當微小時,粒子存在的 Brownian motion 會使分析結果產生隨機的雜 訊,這些雜訊限制了 PIV 技術量測結果的精準度,卻同時也隱含了與溫度相關的 資訊。
2000 年,Olsen 與 Adrian [29]研究了 Brownian motion 對於 micro-PIV 分析 結果影響之理論,發現 Brownian motion 的存在會減弱相關函數信號強度
(correlation signal strength),使得相關函數信號峰值變得更寬。Olsen 與 Adrian [29]據此提出一新參數來量化 Brownian motion 所造成的影響,透過相關函數信號 峰值的分析,可將質點影像測速技術應用至溫度量測。2002 年,Hohreiter 等人 [30]利用前述的理論進行研究,並提出了利用質點影像測速(PIV)來量測溫度的技 術可達約±3°C 的誤差。
質點追蹤測速法也是一種常見用來量測速度的技術,其與質點影像測速法不 同的地方在於,質點追蹤測速法聚焦在單一粒子的影像來追蹤其位置,透過量測 粒子的位移,這項技術也可以用來量測溫度。2005 年,Park 等人[31]使用顯微鏡 拍攝奈米粒子之光學繞射影像,並利用質點追蹤測速法來分析粒子的三維運動並 估算溫度,其溫度量測之不確定性約為±1°C,Park 等人[31]同時也比較了一維、
二維與三維運動分析結果的差異,發現三維運動軌跡分析的結果與理論值最為接 近。2008 年,Chung 等人[32]利用質點追蹤測速法技術,量測二維與三維空間之 溫度場與模擬的結果進行比較,並提出一個可以在沒有生化因素干擾下,量測細 胞周圍空間溫度分佈的技術。
低影像密度質點影像測速法[33]是利用影像訊號之間的交互關聯 (cross- correlation) 來分析單一粒子的位移,其與質點追蹤測速法皆屬於 Lagrangian 方 法。2009 年,Chamarthy 等人[34]進行研究,比較了三種利用 Brownian motion 來 量測溫度的技術,發現低影像密度質點影像測速法具有較佳的精準度,其溫度量 測之不確定性約為 ±1.5°C。
質點追蹤之位置分析
利用影像偵測粒子位置目前主要的方式有矩量法 (moment method) [35-37]及 曲線擬合法 (fitting methods) [35, 37, 38]兩種,都是利用點光源通過光學系統後產 生的模糊影像來計算粒子位置,準確度可達到次像素 (sub-pixel) 的等級。
相較於曲線擬合法,矩量法所需的計算時間比較少且不失其精確性,因此被 廣泛使用於分析大量資料,其計算的方式類似於重心的計算。2007 年 Ivanov 等 人[35]比較了矩量法與其他方法對於實驗與模擬之粒子影像位置分析上的準確 性,發現即使在有雜訊的情況下,矩量法所得的方均根誤差(root-mean-square error)可以達到 0.3 像素以下,若是在採用矩量法前先將影像去除背景並用空間濾 波器進行處理,則方均根誤差可以達到 0.2 像素以下。
透過顯微鏡觀察一微小的光源,因為光學元件之像差與光繞射的特性,其成 像並不是一個點,而是一模糊的圖案,稱為點擴散函數 (point spread function)。
點擴散函數可透過物鏡的數值孔徑 (numerical aperture) 及物鏡與被觀察物間介質 特性等資訊來計算,其中較有名的有 Richards-Wolf 模型[39]與 Gibson-Lanni model 模型[40]。
雖然有這兩種模型可以用來計算點擴散函數,但因為其計算的過程非常繁 複,許多人轉而使用 Airy 函數來近似點擴散函數。當點光源通過理想透鏡時,其 繞射產生的成像為明暗相間的同心環狀條紋,可以用 Airy 函數來描述。儘管 Airy 函數已經是較為簡化的方式,但在使用上依然複雜,因此許多人使用計算上更容 易的其他函數像是 Gaussian 函數來近似點擴散函數[41]。
利用曲線擬合法偵測粒子之位置,須將取得的粒子影像使用特定的函數來進 行擬合,其峰值位置即為粒子之位置。其中較常被使用的函數為 Gaussian 函數。
2005 年 Nobach 與 Honkanen [38]利用一新的迴歸分析方法來計算耦合之二維 Gaussian 函數,並將其與一維 Gaussian 函數近似之結果進行比較,發現使用濾波 器將影像進行處理後,二維 Gaussian 函數法有較高的準確度,且在使用一維 Gaussian 函數進行計算之下,會有較明顯的 pixel locking 現象發生。
Pixel locking 現象又稱為 peak locking,指的是當利用影像分析粒子位置或位 移時,因為有限數量之取樣像素點造成失真,使分析結果傾向集中在特定的值,
並造成位置或位移量分析誤差之現象,不論是在 PIV、PTV 或是電腦視覺之相關 分析中,pixel locking 現象皆會影響分析結果的精確度[36, 38, 42, 43]。
此現象會受到影像品質以及次像素位置分析方法之影響[44],透過粒子位置 或位移量分析結果之機率統計長條圖,可確認此現象對於分析結果之影響[45]。
1.4 研究目的
利用 Brownian motion 之溫度量測技術具有良好的精準度、非侵入性的量測 特性,且不需要昂貴的分析儀器,對於量測微流道中細胞樣本周圍的溫度是非常 重要的技術。然而目前對於各實驗參數與實驗誤差之間的關係並不清楚,因此本 研究旨在探討奈米金溶液之粒子密度、時間間隔與觀察時間等實驗參數與溫度量 測誤差間的關係,希望能為未來利用 Brownian motion 量測溫度時之實驗參數設
計提供一依據來降低實驗誤差。
第二章 實驗架構及不確定性分析
本章將介紹本研究所使用之實驗設備、實驗架構、實驗程序以及分析方法,
並探討如何計算溫度量測的不確定性。
2.1 實驗架構
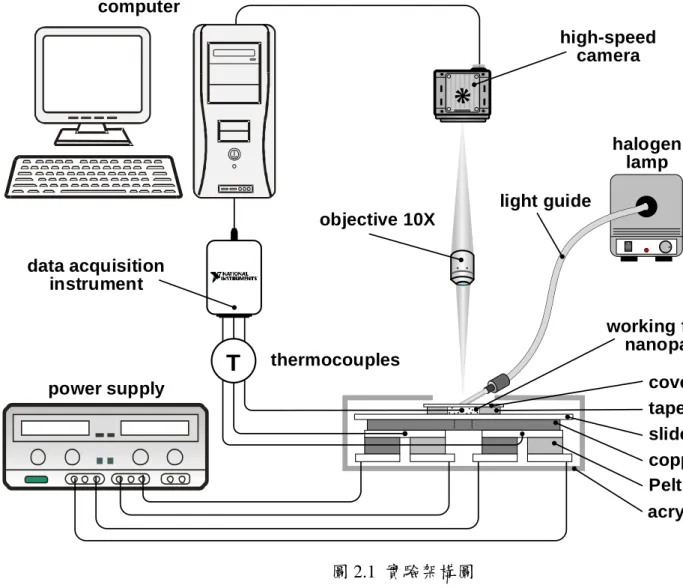
Brownian motion 量測實驗中,首先將製作好之試片水平放置於溫度控制平台 上,透過金相顯微鏡搭配影像擷取系統將影像傳送至電腦並紀錄。所使用之實驗 架構如圖 2.1 所示,可分為試片、溫度控制平台與影像擷取系統三個部分,茲分 述如下:
試片
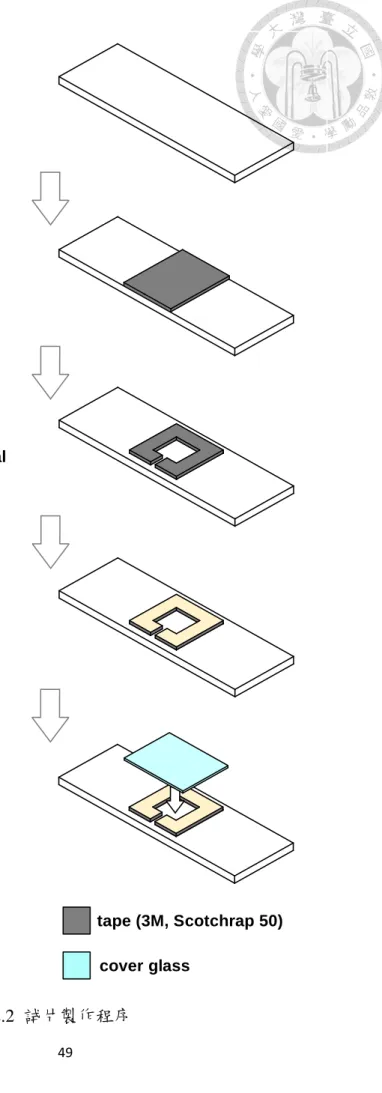
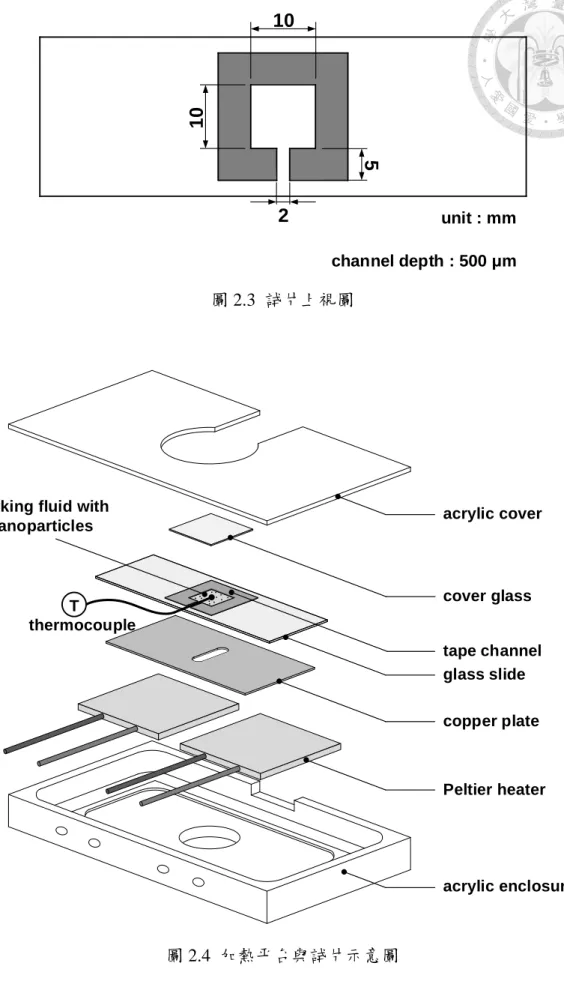
本研究所使用的試片,製作程序如圖 2.2 所示,尺寸如圖 2.3 所示,試片之 詳細製作步驟如下:
A. 玻片清洗
首先將蓋玻片與載玻片放入裝有酒精的容器內,以超音波清洗機 (ultrasonic cleaner, DC80H, Delta New Instrument) 清洗 5 分鐘後吹乾。
B. 膠帶黏貼
黏貼防腐蝕膠帶 (corrosion protection tape, Scotchrap 50, 3M) 至載玻片的中央 區域,過程中輕輕擠壓膠帶,避免膠帶與載玻片之間產生氣泡。
C. 切割出微腔體 (microchamber)
使用美工刀在膠帶中央刻畫一尺寸為 10 mm×10 mm 的方型區域,製作出一 微腔體,並在邊緣刻出一寬度約 2 mm 之開口,最後將欲移除區域的膠帶撕起。
D. 黏貼蓋玻片
使用透明指甲油 (nail polish, Star Wing industry) 均勻塗抹至膠帶表面後,將 蓋玻片覆蓋其上,靜置於室溫下 4 小時,待乾燥後即完成試片的製作。
溫度控制平台
在本研究中,我們使用一溫度控制裝置來調控微腔體中的流體溫度。溫度控 制平台主要由熱電晶片、溫度擷取系統以及電源供應器組成,詳細配置如圖 2.4 所示,詳細製作步驟如下:
A. 熱電晶片安裝
首先製作一厚度為 3 mm 之壓克力外殼,用於減少外在流場干擾,加速微腔 體內溫度之穩定。將熱電晶片 (Thermoelectric Cooling Modules, TES1-12703, 勝特力) 放置至壓克力外殼中後,使用黏土 (clay, PB-7202, 上海擁立膠粘) 固定位置,其中兩熱電晶片間的間距為 4 mm,使觀察時之光源得以穿過試 片,避免熱電晶片表面反射光源影響擷取之粒子影像。將兩熱電晶片之電源 線連接至電源供應器 (Switching DC Power Supply , GPC-3060D, GW Instek),
透過調整電源供應器輸出至熱電晶片之電壓,即可控制熱電晶片之熱面溫 度。
B. 銅片製作
裁切一尺寸為 60 mm×30 mm×1 mm 之銅片,在銅片中央以電鑽鑽出兩個直 徑為 4 mm,圓心距離為 8 mm 之圓孔,接著使用線鋸去除兩圓孔間的材料,
製作出一孔洞,使用銼刀與砂紙將銅片剩餘的毛邊去除,並將銅片清洗乾 淨。
C. 銅片安裝
使用酒精清洗熱電晶片表面,將導熱膏 (thermal compound, MX-4, ARCTIC)
均勻塗抹至熱電晶片上,蓋上銅片並稍微向下擠壓,使銅片完全貼合熱電晶 片之表面,去除銅片邊緣擠壓出之多餘導熱膏。
D. 熱電偶黏貼
將兩組 K 型熱電偶 (thermocouple wire, TT-K-30-D-100, OMEGA) 之熱端使 用黏土 (clay, PB-7202, 上海擁立膠粘) 黏貼固定在兩熱電晶片邊緣之表面,
並連接至資料擷取卡 (data acquisition card, NI 9213, National Instrument),透 過資料擷取卡將熱電偶之電壓訊號傳至電腦中,並搭配 LabVIEW 軟體[46]
將量測到之電壓訊號轉換為溫度資料,使用溫度校正器 (temperature
calibrator, Fluke 724, Fluke) 進行校正後,以圖形介面顯示並紀錄熱電晶片表 面之溫度。
影像擷取系統
粒子觀察使用金相顯微鏡 (metallurgical microscopes, BX51M, Olympus) 搭配 兩個放大倍率分別為 5 與 10 倍之物鏡 (objective lens , MPLN 5/10x, Olympus),其 中 5 倍物鏡只在討論放大倍率之影響時使用,其餘之實驗皆使用 10 倍之物鏡。
使用鹵素光源箱 (light source, LA-150UE, HAYASHI) 外接光纖導管 (light guides, MSG3-1100S-SD, Moritex)作為光源,入射光與試片之夾角約 40°,由試片的斜上 方往試片打光。
影像之拍攝使用高速攝影機 (high speed camera, MotionPro NX7-S1, Integrated Design Tool)之每一個像素點大小為 7.24 × 7.24 m2,搭配相機控制軟體
(MotionPro X Studio 2.02.01, IDT vision)將影像擷取後傳送至電腦儲存。
物鏡的相關景深 (depth of correlation, DOC) 如式 (2.1) [47]所示。
2 2 # 4 1 2# 2 2
p 2
5.95 +1 λ DOC 2 1- ε d
ε
M f
f M
(2.1)
其中為門檻值 (the threshold value),我們依照文獻中之設定為 0.01。 f # 為焦比 (f-number),引用 Bourdon 等人[48]之定義 f # n 2NA。n 為蓋玻片及物 鏡鏡片間介質之折射率,NA 為物鏡之數值孔徑(numerical aperture), λ 為光源之 波長,M 為放大倍率,dp為質點直徑。本實驗中使用之 10 倍物鏡 (objective lens , MPLN 10x, Olympus ) 其 NA 值為 0.25,蓋玻片及物鏡鏡片間介質為空氣 (n = 1.00),實驗光源為鹵素燈光源,波長以 620 nm 計算,粒子之直徑為 150 nm,則由式 (2.1) 可知物鏡之相關景深約為 39.97 μm。
2.2 實驗程序
本節將簡述實驗程序,包含奈米金粒子溶液的調配、去除溶液內預溶氣體、
加熱平台的預熱、試片準備、溫度調整與影像分析程序。
A. 奈米金粒子溶液調配
奈米金粒子溶液由蒸餾水 (蒸餾水, 皓峰) 以及奈米金粒子 (150 nm stabilized gold nanoparticles, Cytodiagnostics) 原液調配而成,粒子之粒徑使用動態光散射粒 徑分析儀 (dynamic light scattering particle size analyzer, Zetasizer Nano, Malvern) 在 25°C 下進行量測,量測之平均粒徑為 159.3 nm,粒徑分佈之標準差為 41.87 nm。
由於實驗所需之粒子密度範圍極大,為了降低奈米金粒子溶液粒子密度之不 確定性,先使用粒子密度為3.6 10 9ml-1之奈米金粒子原液調配粒子密度為109ml-
1之溶液 15 ml 與5 10 7ml-1之溶液 50 ml。接著使用粒子密度為5 10 7ml-1之溶液 調配粒子密度為106ml-1與105ml-1之奈米金粒子溶液各 50 ml;再使用粒子密度為 109ml-1之溶液調配粒子密度為108ml-1與107ml-1之奈米金粒子溶液各 50 ml。各 粒子密度之溶液在實驗中所拍攝之影像如圖 2.5 所示。
B. 去除溶液內預溶氣體
為了避免實驗中的加熱過程使溶液在微腔體中產生氣泡影響觀察,必須先去 除溶液內之預溶氣體。取出欲使用之奈米金粒子溶液約 10ml 倒入燒杯中,使用 鋁箔紙覆蓋燒杯之開口避免水分蒸發,利用加熱板 (hot plate, C-MAG HS 10, IKA) 將燒杯以溫度 70°C 加熱 10 分鐘,去除溶液中之預溶氣體。
C. 預熱加熱平台
將連接至兩熱電晶片之電源供應器電壓調整至 5 V 預熱加熱平台,時間約 10 分鐘。
D. 試片準備
輕輕搖晃燒杯中之奈米金粒子溶液,使沉積於容器底部之粒子均勻分佈在溶 液中,使用注射器(hypodermic syringes, Terumo)將奈米金粒子溶液從微腔體開口 處注射並填滿微腔體,再將 K 型熱電偶從微腔體開口嵌入,另一端連接至資料擷 取卡並進行校正,使用黏土(clay, PB-7202, 上海擁立膠粘) 將微腔體完全密封,
避免實驗過程中溶液的蒸發與外界空氣的擾動。將試片水平放置在加熱平台上,
並調整微腔體使之對齊銅片上的孔洞。
E. 溫度調整
藉由嵌入微腔體與黏貼在熱電晶片上之熱電偶,即可使用 LabVIEW 軟體顯 示並記錄微腔體內工作流體與兩熱電晶片表面之溫度,作為工作流體溫度調整之 依據。
待微腔體內之奈米金溶液溫度接近所需溫度時,小心微調電源供應器之輸出 電壓,以保持微腔體內工作流體達到實驗所需之溫度,並注意兩熱電晶片表面之 溫度必須相同使微腔體內之工作流體溫度均勻。待微腔體內之奈米金溶液溫度維 持穩定時,即可進行影像擷取。
F. 影像擷取
以顯微鏡觀察微腔體內奈米金粒子,確認所有粒子的運動皆為隨機並沒有特 定之運動方向時,代表微腔體內之流體為靜止狀態,即可開始擷取影像。
在討論放大倍率之影響時,以拍攝速率 50 fps (frame per second) 連續拍攝 60 秒來得到一組影像(共 3000 張影像),影像解析度為 1920 1080 像素,8 位元深 度(bit depth)。
其餘實驗以拍攝速率 100 fps (frame per second) 連續拍攝 10 秒來得到一組影 像(共 1000 張影像),影像解析度為 1920 1080 像素,8 位元深度(bit depth)。
G. 影像前處理
為了方便進行後續分析,我們使用 ImageJ 軟體[49]將原始影像組(每組含 1000 張影像)裁剪成許多尺寸較小的粒子影像組,使每組影像內只包含一顆待分 析之粒子,並捨棄粒子在過程中靜止(沉降至微腔體底部)與粒子從影像中消失(位 移過大或是超出物鏡對焦之景深)的影像組,再從這些粒子影像組中選擇十組光線 較均勻之影像組資料進行後續處理與分析。
粒子影像中若有明顯影響分析結果之亮點,則使用 ImageJ 軟體[49]來清除。
由於後續分析使用影像中的最亮點來做為位置分析之參考,這些不屬於粒子亮點 會造成粒子中心位置的誤判。
接著將粒子影像組中的每一張影像分別以 Matlab 軟體[50]讀取成影像陣列 後,獨立進行正規化處理,使每一張影像的強度值範圍由 0 至 255 調整成 0 至 1。此處定義正規化之影像陣列 I,如式 (2.2) 所示。
max
max min
I I I I I
(2.2)
其中 I 為原始影像 array,Imin為原始影像 array 之影像強度最小值,Imax為原始影 像 array 之影像強度最大值,原始影像與處理後之影像如圖 2.6 所示。
H. 粒子位置分析
在分析粒子位置時,我們嘗試使用 2×3, 2×5 與 2×7 個像素點 (pixel, px) 來進 行 Gaussian fit,其結果如圖 2.7 所示,可知當使用 2×3 px 的 Gaussian fit 時,得 到的分析結果有較小誤差,因此在後續所有的資料分析皆使用 2×3 px 的 Gaussian fit 方法。
2×3 px 的 Gaussian fit 方法中,首先找出影像 array 中亮度最高的像素,以此 像素的位置作為中心點,分別在 x 與 y 方向上取出兩個大小為 1×3 與 3×1 px 的 array,使用 MATLAB 軟體[50]內的 fit 函式進行曲線擬合,結果如圖 2.8 所示。
本研究所使用之擬合曲線為一維 Gaussian 函數,其函式如式 (2.3) 所示。
[px] 0, [px]
2[px] 0 2
G( ) I exp
2 x
x x
x
(2.3)
其中 G 為陣列各元素的強度值,x [px]為陣列各元素所對應的座標位置,I0為
Gaussian 函數之峰值,x0, [px]為 Gaussian 函數峰值之座標位置, 為 Gaussian 函x 數之標準差。藉由已知的 G 與x [px]即可進行曲線擬合來求得I0、x0, [px]與 。 x
I. 計算 MSD 與平均溫度
將 x 與 y 方向上之兩個 array 進行曲線擬合後,即可由擬合得到之 Gaussian 函數峰值座標。由於此峰值座標為以最亮像素點位置為原點之增量座標,因此將 峰值座標再加上最亮像素點的位置即可求得第 i 與 i+1 張影像之粒子中心位置
0 0 i
( ,x y ) 與( ,x y0 0 i+1) ,進而計算出粒子的位移,如式 (2.4) 所示。
[px ] [px ] i 0 0 i+1 0 0 i
(x ,y ) ( ,x y ) ( ,x y ) (2.4)
得到以像素為單位之粒子位移後,須將其單位轉換為公尺。根據 2.1.3 小節 之影像擷取系統資訊可知,粒子位移之單位轉換如式 (2.4) 所式。
[m] [px ]
7.24 10 6
x x
M
(2.5)
接著利用 1.2.3 節之式 (1.6) 計算出粒子之 MSD 後,再利用式 (1.8) 即可求 出微腔體中工作流體之溫度。在使用式 (1.8) 計算工作流體之溫度時,由於流體 之黏滯係數亦為溫度之函數,因此需要先給定工作流體之溫度猜值,再使用迭代 法重複計算,詳細流程如圖 2.9 所示。其中工作流體之黏滯係數是在壓力為 0.101 MPa 下,溫度介於 278 K 至 373 K 之間,以間隔 5 K 由套裝軟體 NIST database – Refprop [51]計算得到,再利用 cubic spline interpolation 方法計算所需的值供迭代 使用。
最後將 10 組影像計算得到之溫度,剔除與平均值相差超過兩個標準差以上 的結果後,計算溫度估算之系統誤差與隨機誤差。
2.3 不確定性分析
由於實驗過程中諸多因素會導致實驗結果的誤差,因此藉由不確定性分析來 估算實驗量測的誤差,以證明實驗結果的可信度。
實驗量測誤差可分為隨機誤差 (random errors) 及系統誤差 (systematic errors) 兩種。系統誤差取決於量測設備本身的精確度及量測的方式所決定,可藉由設備的 校正來降低。隨機誤差為不可預期因素所產生之誤差,可藉由重複量測來降低。
量測誤差與隨機誤差及系統誤差的關係式如式 (2.6) 所示。
sys2 ran2
1 2δz δz δz (2.6)
其中δz代表整體量測誤差,δz 代表系統誤差,sys δzran代表隨機誤差。
實驗量測結果通常受到不同獨立變數的影響,即z f z z
1, ,..., 2 zn
,其中 z 代 表量測數據,而 z1, z2, …, zn代表影響 z 之各獨立變數。由於受到誤差傳遞 (errorpropogation) 的影響,z 的相對系統誤差如式 (2.7) 所示。
2 1 2
sys sys
sys 1 sys
δ n i δ i
i i i
z z z z
z z z z
(2.7)其中δ zi代表各項獨立量測變數之系統不確定性。
z 的相對隨機不確定性如式 (2.8) 所示。
ran
1 2
δz 1 z z z n
(2.8)
其中z代表 z 量測 n 次所得之樣本標準差 (standard deviation)。本章節將敘述實驗 中各項量測之不確定性。
奈米金溶液粒子密度之相對不確定性
為了計算奈米金溶液粒子密度之相對不確定性,我們使用高速攝影機在常溫 下,拍攝粒子密度p為 105 ml-1、106 ml-1、107 ml-1與 108 ml-1之溶液影像。每個 粒子密度下皆拍攝 10 張影像。在每一張影像中光線均勻的位置,裁剪出面積分 別為 300×300 px、960×540 px、1080×960 px 與 1920×1080 px 之影像,進行二值 化處理去除在景深之外不清晰的粒子影像,並使用 ImageJ 軟體[49]內的粒子分析 功能,計算影像中粒子面積介於為 5 px 至 15 px 間的粒子個數,即為觀察之溶液 體積內所含的奈米金粒子數量。
欲由影像估算奈米金溶液之粒子密度,可利用式 (2.9) 進行計算。
p
N N
V A DOF
(2.9)
其中 N 為溶液中粒子之個數,V 為溶液之體積,A 為影像之實際面積,DOF 為物 鏡之景深 (depth of field),可使用式 (2.10) [52]計算,其值約為 12.8 μm。
2
n n e
DOF NA NA M
(2.10)
其中 e 為高速攝影機像素點之間的實際間距,其值為 7.24 μm 。
由式 (2.9) 可得不同粒子密度下影像所得的系統不確定性與隨機不確定性,
如表 2.1 所示,故奈米金溶液粒子密度之相對不確定性為 ±60.13%。
微腔體內工作流體溫度量測之相對不確定性
本研究使用 K 型熱電偶量測微腔體內工作流體之溫度,其系統誤差δTi, sys =
±0.5°C。
欲知溫度之隨機誤差δTi, rand,以取樣時間 1 秒、取樣頻率 100 Hz 的條件,
量測實驗使用之溫度最大值 70°C 與最小值 30°C 下之微腔體內工作流體之溫度,
將量測結果使用式 (2.7) 計算,可得各溫度下之溫度量測隨機誤差,取其中之最 大值作為微腔體內工作流體溫度量測之隨機誤差δTi, rand約為 ±0.045°C。
根據隨機誤差與系統誤差之值,帶入式 (2.5) 即可得到微腔體內工作流體之 溫度量測之相對不確定性δ /T Ti i皆小於 ±0.17%。
粒子位移量之不確定性
由式 (2.5) 可知,位移量 之系統誤差如式 (2.11) 所示。 xi
2 2 1/2
i i
i,sys i 1 i
i 1 i
2 2 1/2
i 1 i
δ δ δ
δ δ 2 δ
x x
x x x
x x
x x
x
(2.11)
其中xi與xi+1分別為第 i 與 i+1 張影像中之粒子中心位置, 為第 i 組位移量xi 資料。因為位置之計算皆使用同樣之影像擷取系統與分析方法,故在此假設每一
筆位置中心之不確定性皆相同,即δ = δxi xi+1 = δx。
使用 2×3 px Gaussian interpolation 來判斷粒子之位置,根據 Nobach 與
Honkanen 的研究[38]可知,粒子之影像直徑接近 8 px 時,粒子中心位置之系統不 確定性約為xsys = ysys = ±0.065 px。
接著,若欲估算粒子中心位置之隨機不確定性與粒子位移量之不確定性,我 們針對一個沉降至微腔體底部而靜止不動的質點,以拍攝速率 100 fps (frame per second),擷取 1000 張影像。由此 1000 張影像可分析得到 1000 筆粒子中心位置 資料,再從位置中心計算得到 999 筆位移資料。則粒子在 x 與 y 方向之中心位置 隨機不確定性可由 1000 筆粒子中心位置之標準差來估算,其值分別為 δxrand = ± 0.019 px 與 δyrand = ±0.039 px。粒子在 x 與 y 方向之位移量隨機誤差可由 999 筆 位移之標準差來估算,其值分別為 δxrand = ±0.026 px 與 δyrand = ±0.048 px。
將xsys、xrand、ysys與yrand之代入式 (2.5) 可得x與y分別為 ±0.068 px 與 ±0.076 px,將x與y之代入式 (2.10) 可得到粒子在 x 與 y 方向位移量之系統 不確定性分別為δxsys = ±0.096 px 與δysys = ±0.11 px。將δ x sys、xrand、
δysys 與yrand代入式 (2.5) 可得x與y為±0.099 px 與 ±0.11 px。
MSD 之相對不確定性
本研究中之 MSD,是透過計算粒子在不同時間時在影像上之位置與 N 筆 x 與 y 方向之位移資料x1,...,xN,y1,..., ,代入式 (1.6) 進行計算所得。故可以yN 知道MSD = MSD(x1,...,xN,y1,...,yN),其相對不確定性如式 (2.12) 所示。
2 2 1/2
i i
i 1 i i
δMSD MSD δ MSD δ
MSD MSD MSD
N x y
x y
(2.12) 因為位移之計算皆使用同樣之影像擷取系統與分析方法,故在此假設每一筆位移資料之不確定性皆相同,即δxi = δ 且x δyi = δ ,則由式 (2.12) 可進一y 步得到式 (2.13)。
2 2 1/2
i i
i 1
2 2 1/2
i i
2 i 1
2 2
2 2
i i
2
i=1 i=
δMSD 2 δ 2 y δ
MSD MSD MSD
= 4 δ δ
MSD
4 1 1
= (δ ) (δ ) MSD
N
N
N
x x y
N N
x y
x y
N N
x x y y
N N N
1/21
N
(2.13)
假設粒子 x 與 y 方向之位移為隨機分佈且 N 之數量足以使資料之統計分析呈 現總體性,因此滿足式 (2.14)。
2
2
i2 i2
i i
i 1 i 1 i 1
1 1 1 1
= MSD
2 2
N N N x y
x y
N N N
(2.14)將式 (2.14) 代入式 (2.13) 可得 MSD 之相對不確定性如式 (2.15) 所示。
1/2
2 2
2
1/2
2 2
δMSD 4 1 1
(δ ) ( MSD) (δ ) ( MSD)
MSD MSD 2 2
2 (δ ) (δ ) MSD
x y
N
x y
N
(2.15)
由前一小節計算得到之粒子 x 與 y 方向位移量之不確定性δ x 與δ y ,代入 式 (2.15) 可計算出 MSD 之最大相對不確定性δMSD
MSD 約為 ±1.24%。
粒子方均根位移量之不確定性
由於粒子之方均根位移量 (root-mean-square displacement, RMSD) 為 MSD 之 平方根,故本研究中 RMSD 之不確定性如式 (2.16) 所示。
2 1/2
δRMSD RMSD δMSD MSD
1 δMSD 2 MSD
(2.16)
由式 (2.16) 可計算出 RMSD 之最大不確定性δRMSD為 ±1.07×10-8 m。
粒徑量測之相對不確定性
由量測可知奈米金粒子粒徑之系統不確定性δrp, sys為 9.3 nm,隨機不確定性
p, rand
δr 為 41.62 nm,使用式 (2.5) 可計算得知,粒徑之相對不確定性 δr /r 約為 p p
±28.43%。
工作流體黏滯係數之相對不確定性
工作流體之黏滯係數由套裝軟體 NIST database – Refprop[51]計算得到,軟 體中使用模型所計算出之工作流體黏滯係數相對不確定性可參考 IAPWS (The International Association for the Properties of Water and Steam) 於 2008 年所釋出的 文件[53]。可知當工作流體溫度在 273 K 至 573 K 之間且壓力在 0 至 100MPa 之 間時,黏滯係數之相對不確定性δ 為 ±1%。
微腔體內工作流體溫度估算之相對不確定性
微腔體內工作流體之溫度由式 (1.8) 計算得到,故Te Te( , r , MSD) p ,則工 作流體溫度估算之相對不確定性如式 (2.17) 所示。