大華科技大學
機電工程研究所
碩士論文
Halbach 與單極向排列所產生
磁浮力之分析比較
Analysis and Comparison of Repulsive
Forces between the Halbach and
Unipolar Magnetic Arrays
研 究 生:鄭 富 元
指導教授:曾 慶 祺 博 士
I
Halbach 與單極向排列所產生
磁浮力之分析比較
學生:鄭富元 指導教授:曾慶祺 博士 大華科技大學 機電工程研究所 摘要 本論文主要是針對 halbach 磁排列,與單極向磁排列作比較。在 halbach 磁排列方式下可以產生較大的磁浮力,比單極向磁排列的方 式更為穩定。可用較少的磁鐵運用新的排列方式,取代舊式的滾珠軸 承或單極向磁排列。 模擬時 halbach 磁排列的磁力線的密集度也比較好,單極向磁排 列會有分散的情形,整體的穩定性也是 halbach 磁排列較佳。力的輸 出會因磁鐵橫向間距大小而產生變化,磁鐵橫向間距變化影響單極向 磁排列最為嚴重。 關鍵字:磁浮軸承、Halbach 磁排列、磁浮力II
Analysis and Comparison of Repulsive Forces
between the Halbach and Unipolar Magnetic Arrays
Student:CHENG FU-YUAN Advisor:Dr. Ttseng Ching-Chi
Graduate Schoo of Mechanical Engineering Ta Hwa University of Science and Technology
Abstract
This thesis is dealing with the comparison between the flat Halbach array and the magnetic array with magnetization in the one direction (unipolar array) in their repulsive force. In flat Halbach array mode, magnetic flux can be superposed on one side and cancelled on the other side, which renders a better device than its contra one, e.g., stronger repulsive force, more stable array fixture and fewer magnets usage. With these many advantages, the new Halbach arrangement may supersede the traditional ball bearings or the single-sided maglev arrangement in the foreseeable future.
The simulation by computer software shows that Halbach array offers tighter, higher magnetic flux intensity and better overall stability than its counter case of unipolar array. Both cases reveal their repulsive force are strongly influenced by the size of magnets and their lateral spacing between them, and is more severe for the latter.
III
目錄
中文摘要 ... I 英文摘要 ... II 目錄 ... III 表目錄... V 圖目錄... VI 符號表... IX 一 緒論 ... 1 1-1 前言 ... 1 1-2 研究動機與目的 ... 1 1-3 本文架構 ... 2 二 磁懸浮和 Halbch 磁陣列法之介紹 ... 3 2-1 前言 ... 3 2-2 磁浮的歷史 ... 4 2-3 磁浮原理的分類 ...6
2-4 永磁材料特性介紹 ... 9 2-5 永磁材料的種類... 13 2-6 Halbach 陣列法的介紹 ... 16IV 三 磁場有限元素法基礎理論 ... 18 3-1 前言 ... 18 3-2 有限元素法之簡介 ... 20 3-3 電磁場基本理論 ... 21 3-4 Maxwell 軟體簡介 ... 33 3-5 永久磁鐵反斥基本理論... 34 四 有限元素模型建立 ... 37 4-1 研究方法與步驟... 37 五 結果與討論 ... 47 5-1 磁力線變化 ... 47 5-2 磁強度 H ... 68 5-3 磁感應強度 B ... 70 5-4 力與距離的變化特性 ... 76 六 結論 ... 77 參考文獻 ... 78
V
表目錄
表 1-1 年表 ... 4~5 表 4-1 磁鐵特性 ... 41 表 4-2 分配表 ... 43 表 4-3 N30 的 Halbach 數據... 44 表 4-4 N42 的 Halbach 數據... 45 表 4-5 N30 的單極向數據 ... 46VI
圖目錄
圖 1-1 Halbach 磁排列 ... 2 圖 2-1 磁浮種類圖 ... 7 圖 2-2 磁滯回線 ... 10 圖 2-3 退磁曲線(1、2)及磁能積曲線(3、4) ... 11 圖 2-4 Halbach 磁環磁路 ... 16 圖 2-5 Halbach 磁方向 ... 17 圖 2-6 Halbach 磁力線分佈 ... 17 圖 2-7 磁力線在不同情況下的分佈... 18 圖 2-8 各磁排列所產生的力 ... 18 圖 3-1 電機求解區域模型 ... 27 圖 3-2 三角形剖分單元 ... 28 圖 3-3 永久磁鐵箱斥配置模型 ... 34 圖 3-4 永久磁鐵的等值側面電流模型 ... 35 圖 4-1 前處理流程圖 ... 38 圖 4-2 磁排列結構剖面圖(A2B0) ... 39 圖 4-3 雙層磁排列網格劃分剖面圖(1) ... 40 圖 4-4 靜磁力計算系統 ... 42 圖 4-5 Halbach 磁極方向 ... 43VII
圖 4-5 Halbach-N30 力分布圖 ... 44
圖 4-6 Halbach-N42 力分布圖 ... 45
圖 4-7 N30 力分布圖 ... 46
圖 5-1 A2B0 磁力線(a)HalbachN30 和(b)N30 ... 48
圖 5-2 A2B0 磁力線(a)HalbachN30 和(b)HalbachN42H ... 49
圖 5-3 A2B5 磁力線(a)HalbachN30 和(b)N30 ... 50
圖 5-4 A2B5 磁力線(a)HalbachN30 和(b)HalbachN42H ... 51
圖 5-5 A2B10 磁力線(a)HalbachN30 和(b)N30 ... 52
圖 5-6 A2B10 磁力線(a)HalbachN30 和(b)HalbachN42H ... 53
圖 5-7 A5B0 磁力線(a)HalbachN30 和(b)N30... 55
圖 5-8 A5B0 磁力線(a)HalbachN30 和(b)HalbachN42H ... 56
圖 5-9 A5B5 磁力線(a)HalbachN30 和(b)N30... 57
圖 5-10 A5B5 磁力線(a)HalbachN30 和(b)HalbachN42H ... 58
圖 5-11 A5B10 磁力線(a)HalbachN30 和(b)N30 ... 59
圖 5-12 A5B10 磁力線(a)HalbachN30 和(b)HalbachN42H ... 60
圖 5-13 A10B0 磁力線(a)HalbachN30 和(b)N30 ... 62
圖 5-14 A10B0 磁力線(a)HalbachN30 和(b)HalbachN42H ... 63
圖 5-15 A10B5 磁力線(a)HalbachN30 和(b)N30 ... 64
VIII
圖 5-17 A10B10 磁力線 a)HalbachN30 和(b)N30 ... 66
圖 5-18 A10B10 磁力線(a)HalbachN30 和(b)HalbachN42H ... 67
圖 5-19 A5B5 磁強度 H (a)HalbachN30 和(b)N30 ... 68
圖 5-20 A5B5 磁強度 H (a)HalbachN30 和(b)HalbachN42H ... 69
圖 5-21 A5B0 磁感應強度 B (a)HalbachN30 和(b)N30 ... 70
圖 5-22 A5B0 磁感應強度 B (a)HalbachN30 和(b)HalbachN42H .... 71
圖 5-23 A5B5 磁感應強度 B (a)HalbachN30 和(b)N30 ... 72
圖 5-24 A5B5 磁感應強度 B (a)HalbachN30 和(b)HalbachN42H .... 73
圖 5-25 A5B10 磁感應強度 B (a)HalbachN30 和(b)N30... 74
IX
符號表
符號 說明 J 電流密度矢量 D 電通密度(C/m2 ) B 磁感應強度(T) E 電場強度(V/m) A 矢量磁位 I 電流密度(A/m2) F 力(Nt) K 電流密度(A/m)1 第一章 緒論 1-1 前言 在現今市面上的軸承都只是將摩擦力減到最低,但無法將摩擦力 降至零。因為市面上的軸承滾子部分為滾珠和滾針兩種,也有雙 層滾珠(滾針)軸承,不外乎就是用兩層來降低摩擦係數,但在滾 子在跟定子跟轉子之間,還是會因為摩擦而產生熱及機械損耗, 及潤滑液的不同也會有差異。而磁浮軸承是要將摩擦力降為 0, 也因為現今永磁磁鐵的磁力強,以及激磁技術可以多方向激磁, 形狀也多樣性可以客製化。 1-2 研究動機與目的 本文研究是運用 Klaus Halbach 在 1980 年所發表的永久磁鐵排 列方式,來設計一種新式的磁浮軸承[1][2][3]。此種排列方式 會改變磁力線的路徑變化,磁力線會集中在其中一邊,且另一邊 會變得鬆散如圖(1-1),進而提升一邊的磁場強度,比一般的排 列方式優。在軸向軸承的強度上會有大幅度的增強,且他的穩定 性也較傳統的磁浮軸承優,在面積上也可用相同的排列方式作延 伸。現今多是用電激磁來做為磁浮軸承[4],運用 PID 控制磁的 強度,進而達到我們要的位置。而本文所探討是運用磁力相斥的
2 原理來平衡位置,因為它所產生出的相斥力相當大,且磁力線的 方向是呈現平躺的方式。 圖 1-1 Halbach 磁排列 1-3 本文架構 運用 Ansoft[5]磁場分析軟體,分析磁場的變化以及力在不同距 離的變化,用有限元素法來進行運算作為比對。而模擬的模型會有些 不同,為了要減少網格的複雜化,也探討軸向軸承的優化。先進行單 一磁排列的分析,在進行每一個距離間相對力的分析,分析狀態時要 了解磁力線的分布,將磁鐵特性內建於軟體內,以便分析時的特性的 一致性。 進行不同間距的比對數據,前提是運用以實體的數據來做相對應 的位置模擬,在磁鐵與磁鐵間距的改變,力的變化是否有相對應的變 化。
3 第二章 磁懸浮和 Halbach 磁陣列法之介紹 2-1 前言 在運輸及工業裡都有動力源,但在傳動時會產生震動和噪音,需 要定期的保養軸承以利作業。若是能使用非接觸方式的軸承,可以減 少摩擦、磨耗、震動、及噪音,可以超越傳統軸承達到超高速及長時 間免維護的優點。 非接觸式軸承具有下列優點 [4]: 非接觸化 非接觸可以減少摩擦與磨耗的問題,壽命可 以比傳統軸承更為久,維修簡易大幅減少震動,進而可以 增加速度,運動狀態更為流暢,減少能量的損耗。 控制性 可以運用主被動元件,控制位置和減少震 動的幅度,速度的控制及物件的鋼性。都可接電腦控制參 數的設定。 特殊環境使用 因無潤滑的問題,可以在真空、無塵室內、 高溫、低溫、水蒸氣、特殊氣體中或是特殊環境中使用。 特殊機能 運動狀態的監視、記錄、診斷機能等。 力的分佈 傳統軸承都是集中式的點或線接觸,而 磁浮軸承是面的接觸,可以將作用力分佈均勻。
4 2-2 磁浮的歷史 在古代,古希臘人就知道磁鐵礦會吸鐵,中國漢代就有能力使用 羅盤並且知道琥珀摩擦產生靜電能吸引輕物體。在現今科學技術進步, 以及電磁、永磁鐵的技術進步,建立使用磁浮軸承的基礎。表 1-1 記 載應用磁浮軸承之重要是項[4]。 表 1-1 磁浮軸承應用年表 年份 事項 1600 Gilbert(英),著作「磁鐵漫談」 1820 Dersted(丹麥)發現電流的磁作用 1820 比歐(法)、沙巴爾(法)提出比歐.沙巴爾定律 1831 法拉第(英)發現電磁感應 1842 安修(英)發表安修定理 1864 Maxwell(英)把電磁場理論集大成 1891 Fleming(英)發表電磁反斥論文 1906 德.佛雷斯特(美)發明 3 及真空管 1911 翁尼斯(荷蘭)發現超導體現象 1937 霍姆斯、比姆斯(美)以磁力軸承為目標而首度實驗主動形磁浮 1938 肯帕(德)以磁浮鐵路為目標而首度實驗主動型磁浮 1948 蕭克雷(美)發明電晶體
5 1958 GE 公司(美)發明閘流體 1960 卡爾曼(美),最適調節子理論 1966 雷斯威特(英)演講電磁感應型磁浮 1971 Intel 公司(美)開發 4 位元微電腦 4004 1976 成立磁力軸承專門公司 S2M 公司(法) 1977 召開第一屆 MAGLEV 國際會議(波士頓) 1979 日本國鐵創下 ML-500,517km/h 紀錄 1984 英國伯明罕機場採用磁浮式鐵路 1985 凡波科學博覽會展示 HS ST-03 行駛 1986 德國 TR-06 創下 400km/h 紀錄 1986 貝德諾斯、幕勒(美)發現氧化物高溫超導體性 1988 日本電氣學會成立磁氣浮上方式調查專門委員會 1988 召開第一屆磁力軸承國際座談會(蘇黎世)
6 2-3 磁浮在原理上的分類 能產生磁力的代表有永久磁體、常導體電磁體、超導體磁鐵。 易通電流或磁力線的物質有超導體、強磁性體、金屬導體。以上 6 種 物體組合產生各種磁浮方式,但都須有發生磁力的來源。[4] 常見的有下列十種: 1. 永久磁鐵與超導體之間反斥力的方式圖(2-1.1) 2. 永久磁鐵與強磁性體之間吸引力的方式圖(2-1.2) 3. 常導體電磁鐵與強磁性體之間吸引力的方式圖(2-1.3) 4. 超導體磁鐵與強磁性體之間吸引力的方式圖(2-1.4) 5. 常導體電磁鐵與金屬導體之間反斥力的方式圖(2-1.5) 6. 超導體磁鐵與金屬導體之間反斥力及吸引力的方式圖(2-1.6) 7. 超導體磁鐵與常導體電磁鐵之間吸引力的方式圖(2-1.7) 8. 常導體電磁鐵與永久磁鐵之間吸引力的方式圖(2-1.8) 9. 常導體電磁鐵之間吸引力的方式圖(2-1.9) 10. 永久磁鐵之間反斥力的方式圖(2-1.10)
7 圖 2-1.1 永久磁鐵與超導體 圖 2-1.2 永久磁鐵與強磁性體 圖 2-1.3 常導體電磁鐵與強磁性體 圖 2-1.4 超導體磁鐵與 強磁性體 圖 2-1.5 常導體電磁鐵與金屬導體 圖 2-1.6 超導體磁鐵與金屬體 圖 2-1.7 超導體磁鐵與常導體電磁鐵 圖 2-1.8 常導體電磁鐵與 永久磁鐵 圖 2-1.9 常導體電磁鐵與常導體電磁鐵 圖 2-1.10 永久磁鐵與 永久磁鐵 圖 2-1 磁浮種類圖 強磁性體 超導體 永久磁鐵 永久磁鐵 超導體磁鐵 強磁性體 強磁性體 常導體電磁鐵 超導體磁鐵 金屬導體 金屬導體 常導體電磁鐵 常導體電磁鐵 超導體磁鐵 永久磁鐵 常導體電磁鐵 永久磁鐵 常導體電磁鐵 永久磁鐵 常導體電磁鐵
8 以磁浮運動型態的分類為四種: 1. 靜止使用 2. 伺服使用 3. 直線運動 4. 旋轉運動 磁浮實際運用的種類有: 1. 磁浮式鐵路 2. 磁浮式搬運、裝卸裝置 3. 磁力軸承 4. 防震裝置 5. 定位裝置 6. 測定器 7. 制動器 8. 物理實驗 9. 教育研究用
9
2-4 永磁材料特性介紹
2.4.1 永磁材料的主要性能和磁滯回線
永磁材料(Permanent Magnet Material)的磁性能用一些磁參數表
示,如剩餘磁感應強度 Br、矯頑力 Hc、最大磁能積(BH)max等,這些 參數由退磁曲線決定,而退磁曲線是磁滯線的一部份,為了說明這些 參數,從磁滯回線形成過程開始。 在直角坐標系中,作 B-H 曲線,初始狀態從原點開始,逐漸增 加外界磁場強度 H 值,則磁感應強度 B 值由 O 點沿著曲線 OA 上升, 當磁性材料中 B 值到達 A 點時,B值達到飽和值,磁性才料被完全磁 化,OA 曲線被稱為初始磁化曲線。這時如果逐漸減少外界磁場強度 H 值,則磁感應強度 B 值將隨之下降,但磁感應強度 B 值按另一曲 線 AC 下降,當 H 值下降為零時,永磁體中 B 值並不會為零,而等 於 OC,對應 Br值則稱為剩餘磁感應強度。如果此時改變 H 值方向, 再往負方向上增加 H 值,則 B 值繼續下降,當 H 值下降到 Hc值時, B 值降為零,此時的 Hc值稱為矯頑力。繼續反方向上增加 H 值,B 值變為負值,逐漸增加到反方向飽和點 E 點,再在 H 值負方向上減 少 H 值到零,並在正方向上增加 H 值,則 B 值從負值逐步減少到零 後又在正方向上增加,最後達到飽和點 A 點此曲線如圖(2-2)所示, 由圖可見,隨著 H 值的反覆變化,B 值將沿著 ACDEFGA 變化,所
10 構成的閉合曲線稱為磁滯回線,磁滯回線要經過 2 或 3 次反覆磁化才 能完全重合。磁滯回線反映了磁性材料的許多特性,掌握永磁材料的 磁滯回線對應用永磁材料是十分重要的[3][5][6]。 圖 2-2 磁滯回線 2.4.2 退磁曲線和永磁材料的磁參數 永磁體的磁特性是當它被外界磁場磁化後,即使除掉外界磁場, 在永磁體周圍仍然保留著一個恆定磁場,永磁體本身還可以對外提供 磁能,此時永磁體本身將受到一個退磁磁場作用,該退磁磁場與原來 的外界磁場相反,因而永磁體工作點的位置將在磁滯回線的第二象限 部份上,即在退磁曲線上,如圖(2-3)所示曲線 1、2 分別表示非線性 與線性退磁曲線。圖中永磁體際工作點用P1、(P2)來表示,永磁材料 的磁能均可用退磁曲線上的物理量表示,如永磁體剩餘磁感應強度 Br、矯頑力Hc、永磁體實際工作時提供的磁感應強度BP1 (BP2)與磁場
11 強度HP1 (HP2)及永磁體的磁能積(BH)[4][6][7]。 B Br B P1 B P2 P1 P2 H C H P1 H P2 O (BH)max 2 (BH)max1 H BH 1 2 3 4 圖 2-3 退磁曲線(1、2)及磁能積曲線(3、4) 剩餘磁感應強度 Br及永磁體磁感應強度Bm 永磁體被充磁至飽和後,假設去掉外界磁場後永磁體仍有磁場存 在,永磁體具有的磁感應強度稱為剩餘磁感強度 Br,其單位用特 斯拉(T)表示。在永磁電機的磁路中,由於有磁性材料本身的磁 阻及電機氣隙的存在而存在磁位降,這對永磁體來說,相當於產 生一個反向磁場,這就是使永磁體的工作點由Br 點下降至P1或 P2點,而P1或 P2點所對應的 B值變為永磁體的工作點 BP1或BP2, 一般稱BP1或BP2為永磁體磁感強度[4][6][7]。 矯頑力Hc、內稟矯頑力 mHc及飽和磁場強度 Hs 永磁材料在反向磁場作用下,當剩餘磁感應強度Br下降到零時,
12 此時磁場強度稱為磁感應矯頑力,可用BHc表示,一般簡稱為矯 頑力Hc,單位用 A/m 表示。另外還有一個是磁化強度 M 下降為 零,即已經完全失磁的磁場強度值,稱內禀矯頑力,用 mHc表示, 單位也是 A/m,實際上此矯頑力才是真的矯頑力,但對於鋁鎳鈷 永磁材料,兩者差異很小,而對於釹鐵硼等稀土材料,兩者差異 很大。永磁材料被完全磁化所需要的外界磁場強度,稱為飽和磁 場強度,用Hs表示,單位也是 A/m,不同的永磁材料,飽和磁 場強度大不相同,鋁鎳鈷永磁材料和鐵氧體永磁材料的飽和磁場 強度是矯頑力的 3~6 倍; 而稀土永磁材料的飽和磁場強大約是 矯頑力的 2~3 倍[4][6][7]。 磁能積和最大磁能積 磁能積是指永磁體退磁曲線上每一點所對應的磁感應強度 B 值 與磁場強度H值乘積(BH)稱為磁能積,其單位為 J/m3 ,如圖(2-3) 所示曲線 3、4 表示之。它表明永磁體內部儲存能量的大小。由 於退磁曲線上各點位置不同,其(BH)值也不同,通常把(BH)值最 大的位置用(BH)max 表示,稱為最大磁能積 [4][6][7]。
13 2-5 永磁材料的種類 磁浮軸承之材料主要為永磁材料,一般又把永磁材料為三類,在 本章節作個簡單的說明。 2.5.1 鐵氧體永磁材料 鐵氧體永磁材料屬於非金屬永磁材料,目前在永磁電機中常用鋇 鐵氧體(BaO.6Fe2O3)和鍶鐵氧體(SrO.6Fe2O3),鍶鐵氧體 Hc 值略高 於鋇鐵氧體。鐵氧體不含貴金屬而價格低價,製造工藝簡單。使用時 不需要進行穩磁處理,因而在一般小功率永磁電機中應用最廣。但鐵 氧體最大的缺點是剩餘磁感應強度低,最大磁能積小,在設計時使用 材料較多,電機體積大。其次,剩餘磁感應強度溫度係數αBr和矯頑 力溫度係數αHc大,特別應指出的是,αHc為正值,即矯頑力隨溫度 升高而增大,隨溫度下降而減小,所以是需要進行低溫時最大去磁工 作點的核算,以防止在低溫時液生不可逆磁現象。再者,鐵氧體永磁 材料硬脆,可加工性差,只能用軟質砂輪進行磨削加工[4][6][7]。 2.5.2 鋁鎳鈷永磁材料 鋁鎳鈷(AlNiCo)永磁材料是於 20 世紀 30 年代研製成功的,由於 它的磁性能好,溫度係數小,因而取得廣泛應用。60 年代以後。隨 著鐵氧體永磁材料與稀土永磁材料相繼問世,鋁鎳鈷永磁材料逐步被 取代,所佔比重逐步下降。
14 按製造工藝不同,鋁鎳鈷永磁材料可分為鑄造成型和粉末燒結成 型兩種,鑄造成型磁性好,粉末燒結成型工藝簡單,在永磁電機中常 用的是鑄造成型。這種材料剩餘磁感應強度最高達 1.35T,且溫度係 數小,目前仍被廣泛應用在高精度的儀器儀表的永磁電機中。但是鋁 鎳鈷永磁材料也有它的缺點,首先鋁鎳鈷永磁材料矯頑力低,為了避 免造成不可逆退磁和磁通分布畸形,在設計時一定要合理選擇工作點, 在使用時避免和鐵磁性物質接觸。其次,它退磁曲線成非線性,因而 和回覆曲線不重合,在設計時除合理設計工作點外,還必對永磁材料 進行穩磁處理,可加工性差,即加工成型比較困難[4][6][7]。 2.5.3 稀土永磁材料 稀土永磁材料與釹鐵硼(NdFeB)永磁材料分別為不同類型的稀土 永磁材料,它們都是高剩餘磁感應強度、高矯頑力及及高磁能積的永 磁材料。稀土鈷(SmCo5)永磁材料產生於 1966 年,這種材料最大磁能 積已超過 191.04kJ/m3 (24MGOe)。到了 1979 年,又突破了技術上難關, 研制出 Sm2Co17永磁材料。目前這種永磁材料在工業產品中最大磁能積 可達 258.7kJ/m3 (32.5MGOe)。此外,上述兩種剩餘磁感應強度 Br 可 達 0.85~1.15T,矯頑力為 480~800kA/m,其退磁曲線均為一直線,溫 度係數低,即使高溫下使用也不怕退磁。但這兩種材料加工性能差, 另一點就是價格高。釹鐵硼(NdFeB)永磁材磁是在 1983 年問世的高磁
15 性的永磁材料,最大磁能積可達 397.9kJ/m3 (50MGOe),室溫下剩餘磁 感強度可達 1.47T,磁感應矯頑力可達 992kA/m,是目前磁性能最好 的永磁材料。 由於這種材料不含鈷這種戰略物資,而釹又比釤便宜很多,釹鐵 硼要比稀土鈷永磁材料的價格便宜。釹鐵硼永磁材料的不足之處,首 先是溫度係數過高、磁的穩定性差,一般在高溫下使用時,退磁曲線 下半部分產生彎曲,為此要使用此材料一定要校核永磁材料最大去磁 工作點。其次是工作溫度低,一般在 300~400℃左右,一旦在高溫時 易產生永久退磁。釹鐵硼化學穩定性差,所以必須在磁體外層加上一 層塗層,一般塗層厚度為 10~14μm,目前再外層塗層上有下列三種 方式,即為塗漆,電鍍、電泳等方式,不同的塗層,在抗腐蝕性也不 同,環氧樹脂噴塗抗鹽霧腐蝕能力、好抗沖擊能力好,電鍍則抗溶劑 [4][6][7]。 2-6 Halbach 陣列法的介紹 此排列方式是在 1980 年由物理學家 Klaus Halbach[1],提出一新 型的磁環磁路設計理念(Halbach 磁環),直接將永久磁鐵的磁化向量 (Magnetization Vector)加以配置,使得磁環表面磁通分佈呈現理想的 弦波分佈,如圖(2-4)所示。
16 將磁鐵的向量集中,可以把磁鐵的特性加強於一個面上。而另外 一面的磁性會減弱。強化的那一面磁力線會呈現跟面平行如圖(2-6), 而將相近的磁力線迴路會合併為一個,減弱另一邊的磁力線密集度, 且也可以減少漏磁的現象。 圖 2-4 Halbach 磁環磁路
← ↓ → ↑
圖 2-5 Halbach 磁方向17 圖 2-6 Halbach 磁力線分佈 Arvi Kruusing[2]在 2001 年做了磁鐵在相同大小下的強度分佈,在 單軸向磁排列,運用不同的磁方向做力的研究,在磁力線分佈來顯示 集中的位置。在磁方向為 45 度時為一般單極向的 1.38 倍,在用了 Halbach 磁排列也是呈現 1.26 倍,磁向最佳化時力可以達到 1.44 倍。 如圖(2-8)就可以看出力在不同角度下所產生的力,在磁力線的分布 如圖(2-7)分別為四種類型。
18 2-7a 磁向為軸向 2-7b 磁向為徑向 2-7c 磁向為軸向 45 度 2-7d 磁向為徑向與軸向 圖 2-7 磁力線在不同情況下的分佈 圖 2-8 各磁排列所產生的力
19 第三章 磁場有限元素法基礎理論 3-1 前言 磁分佈邊界值的問題從歷史發展的過程中來看,主要的求解方法 有四種類型包含圖解法、解析法、模擬法與數值計算法等。其中的數 值計算法又包括: 混合法、有限元素法、有限差分法、積分工程法、 邊界條件與邊界元素法等,目前在使用上最為普遍的是有限元素法, 所以有有限元素法被設計成商業套裝軟體。 本文是用由 Ansoft[5]公司所設計的 Maxwell 軟體,這是一套用 來分析電磁場之套裝模擬軟體,主要的功能在於利用有限元素法 (Finite element method, FEM)來計算電磁場之特性。本章對有限元 素法做個簡單的介紹,以及描述靜磁場模擬軟體 Maxwell 建構模型之 過程,進而瞭解磁浮軸承之磁場分佈的情形及所產生出與磁場相關的 特性。[5]
20
3-2 有限元素法之簡介
有限元素法(Finite element method, FEM)可以說是現代在科學 工程上一種具有高效率的工程計算法,有限元素法的發展和創立對於 現代科學工程計算上的應用,具有非常大的影響。 講到有限元素法(FEM)的歷史,應該從有計算機開始,計算機誕 生於 1940 年代,一直到 1950 年代才廣泛的使用。最早使用有限元素 法來計算約於 1950 年代,當時也是飛機與飛行器將從螺旋槳式飛機 改變成噴射式飛機的時代。故利用有限元素法來計算飛機或是飛行器 的結構進而改良飛機與飛行器之設計。 從有限元素計算法開始迄今約有 50 年,在這 50 年來應用有限元 素法的領域越來越廣泛。例如固體結構、土木建築、機械工程、流體 力學、電子應用、電機工程、生物領域等,多數領域都有有限元素法 的應用。現代由於科技在計算機的硬體與軟體上發展迅速,因些有限 元素計算法的商用套裝軟體多達上千種,包含的領域也很廣,並且已 經成為現代科學工程上不可或缺的工具。 現代的科學工程上,使用有限元素法已經是非常之廣泛,工業設 計上也列為標準之一,許多的工業設計都必須借由一些特定的有限元 素法軟體分析過才可被使用。借由使用有限元素法套裝軟體,設計者 在原本需要長時間才能完成的分析,變成只需要幾天就可以分析完成,
21 因此可以大大的減少設計者在設計工作上的時間與成本,進而提高了 設計上的效率以及品質,這對工程上是有非常大的幫助。 有限元素法是將連續性的場域,分成很多細小的元素,這些細小 的元素內之場量,可以視需要程度的不同而有所變化,並採用適合的 階次近似函數於以表示。在所有模型形狀的不同,其邊界的形狀也並 不相同,元素也可以依照不同形狀進行不同的分割,進而滿足所有各 種複雜的邊界條件問題。因有限元素法是將工程上的問題藉由微分方 程式轉變成積分方程式的形式,再把問題進行幾何的分割與變數內差 的近似之後,轉換成聯立代數的方程式,撰寫成為程式,撰寫為程式 之後再交由計算機(電腦)解出方程式之中的未知變數,做後續的處理。 因此有限元素法被公認為是一種非常強而有力的數值解析之工具 [5]。 3-3 電磁場基本理論 麥克斯威爾方程式可以表示為兩種形式:一種是積分形式,另一 種是微分形式。前者對應的求解方式為積分方程法,後者對應的則是 微分方程法。有限元素採用的正是微分方程法。通過位函數的選取和 邊界定條件的施加,可以唯一求解得到方程式的解[5]。
22 3-3.1 麥克斯威爾方程 19 世紀中期,麥克斯威爾在總結前人工作的基礎上,提出了適 用於所有宏觀電磁現象的數學模型,稱之為麥克斯威爾方程式。它是 電磁場理論的基礎,也是工程電磁場數值分析的出發點。麥克斯威爾 方程實際上由四個定律組成分別為: 安培環路定律 法拉第電磁感應定律 高斯電通定律 高斯磁通定律(亦稱磁通連續定律) 以下四種為麥克斯威爾方程式的四大積分定律。 安培定環路定律如下式:
S
d
t
D
J
l
d
H
(3.1) 法拉第電磁感應定律如下式:S
d
t
B
J
l
d
E
(3.2) 高斯電通定律如下式:
S vdv
S
d
D
(3.3) 高斯磁通定律如下式:23
SS
d
B
0
(3.4) 另外麥克斯威爾方程式中,有另外的微分形式,借由上述定律可 以導出處理有限元素電磁問題的微分方程式,這些導出之微分方程式 為下列方程式:t
D
J
H
(3.5)t
B
B
(3.6)
D
(3.7) 0 B (3.8) 上面方程式中包含兩個旋度方程式(3-5)、(3-6)和兩個散度方程 式(3-7)、(3-8)。 場量E、D、B、H 之間的關係由媒質特性決定。對於線性媒質, 其關係為: E D
(3.9)H
B
(3.10) E J
(3.11) 式中,對於各向同性介質,
是標量; 對於各向性介質, 它們是張量[5]。24 3-3.2 位函數及其微分方程式 在分析和計算電磁場問題時為了求出場量(E或 B)與場源(σ或 J)之間的關係,會經常引用位函數(或稱勢函數)作為輔助量,可以減 少未知數的個數,使問題得到簡化,有時也使物理概念更加清楚。在 無旋場(即旋度為零的場)中可以採用標量位函數,而在有旋場中,必 須用矢量位函數,不能用標量位函數。靜電場、電源以外區域的恆定 電流場以及電流密度為零的空間範圍內的磁場,都是無旋場,因此可 以引入標量電位
或標量磁位
m。它們與場強的關係如下:
E
(3.12)
H
m (3.13) 式中的負號表示電位(或磁位)梯度與電場(或磁場)強度方向相 反。從矢量分析可知,任何標量函數的梯度的旋度恆等於零,所以這 樣的位函數總是滿足無旋場的條件。 對於電場而言,利用式(3-12)可以確定電位函數與電荷密度之間 的關係,從而可以根據電荷分佈找出相應的位函數,再從它求出電場 強度,為此,在式(3-12)兩端取散度,得:
E
(3.14)25 再利用靜電學的高斯定律得到:
(3.15) 這就是靜電場的泊松方程式,在沒有自由電荷區域
0
,式 (3-15)變為:0
(3.16) 這個特殊情況下的泊松方程式稱為拉普斯方程式。合併起來得:
0
(3.17) 上式稱作電位場的微分方程式。 又於磁場,因 B 0,對式(3-13)兩邊取散度,得:
m 0 (3.18) 所以在沒有電流的區域,標量磁位恆滿足拉普拉斯方程式。當解 出
m 後,再從它求出磁場強度。 對於有電流的區域,因H J ,屬於有旋場,因此必須引 入矢量磁位A,一般它是空間坐標和時間的函數,包含三個空間分量。 在國際單位制中,A 的單位是 Wb/m; 自從採用矢量磁化之後,;應使 用麥克斯威爾方程式仍就能夠滿足,這只要使用 A與B之間滿足: A B (3.19)26 關係,便能符合要求。因為
0
)
(
B
A
(3.20) 即表示磁通連續性的條件永遠滿足,對於沒有電流存在的區域,矢量 磁位同樣能夠應用[5]。 3.3.3 電磁場之有限元素法 電機在數值求解區域模型時如圖 3-1 所示,由於所分析電機為四 極結構電機的磁場對稱分佈,所以僅取了電機的四分之一作說明,以 減少其工作量和求解的規模,另一方面也不失其代表性。 因求解區域有電流源存在,計算時必須採用矢量磁位來求解。為 了建立電機內部磁場的微分方程,確定求解區域和有限元素法求解的 邊界條件,提出以下假設: (1) 採用二維場模擬實際磁場; 選取直角坐標系和國際單位 制。 (2) 對定子槽口、定子扇形片的圓角及磁極沖片部份圓角、倒 角等細微之處作近似處理。 (3) 忽略端部效應,磁場沿軸向均勻分佈,即電流密度矢量J 和磁位矢量A只有軸向分量,J=Jz,A=Az。27 圖 3-1 電機求解區域模型 (4) 電機外部磁場所占分量甚小,可以忽略。定子外表面圓周 和轉子內表面圓周為零矢量位面。 (5) 不計交變磁場在導電材料中如定子線組、鐵心沖片及機座 中的渦流反應,因此同步電機的磁場可作為非線性恆定磁 場來處理。 矢量磁位Az表達時,場域內滿足邊值問題:
C B z D A z D C B A z z z ZA
A
A
J
y
A
y
x
A
x
0
1
1
,
(3.21) 上式等介於以下變分問題:
0
min
2
1
2 1 2 2 z z z z z zA
dxdy
J
A
y
A
x
A
A
W
(3.22) 二維有限元素法就是從式(3-22)出發,將求解區域剖分小的三角28 形區域,這些細小的三角形區域又稱為單元,在單元內構造出矢量磁 位的插值函數,然後利用插值法將式(3-22)的條件變分問題單元化為 多元函數的極值問題, 即化為一組關於各個節點矢量磁位的代數方 程式,求解,得矢量磁位的數值解。 採用三角形剖分單元,見圖 3-2,在單元e 內採用線性插值方法, 可得矢量磁位的線性插值函數: m m j j i i
A
N
A
N
A
N
A
(3.24) 式中,下標 i、j、m 表示三角形剖分單元 e 的三個頂點,它們 之間是逆時針排列的。N是形狀函數,它的表達式是:
a
b
x
c
y
N
k k k e k
2
1
(3.25) 圖 3-2 三角形剖分單元 式中29
i j m m i j j m ix
x
c
x
x
c
x
x
c
i j j i m m i i m j j m m j iy
x
y
x
a
y
x
y
x
a
y
x
y
x
a
j i m i m j m j iy
y
b
y
y
b
y
y
b
(3.26)
m m j j i i i j j i ey
x
y
x
y
x
c
b
c
b
1
1
1
2
1
2
1
(3.27) 式中,
e表示三角形單元 e 的面積。 將式(3-24)對x和 y分別求偏導數,可得:
m m j j i i e m m j j i i eA
c
A
c
A
c
y
A
A
b
A
b
A
b
x
A
2
1
2
1
(3.28) 已知整個求解區域的三角形單元的總數為 E,那麼能量泛函可表 示為:
E e E e Z Z Z Z Z e ZA
J
dxdy
y
A
x
A
A
W
A
W
1 1 2 22
1
)
(
)
(
(3.29) 將式(3-24)、(3-28)代入式(3-29)中,單元 e 的能量泛函可表示 為:
i j m
e z m m j j i i m m j j i i e Z eA
A
A
J
A
c
A
c
A
c
A
b
A
b
A
b
A
W
3
8
1
)
(
2 2
(3.30) 求上式對三節點A 的一階偏導,則有:30
e e e m j i m j i mm mj mi jm jj ji im ij ii m e j e i eP
A
K
P
P
P
A
A
A
K
K
K
K
K
K
K
K
K
A
W
A
W
A
W
(3.31) 其中,
l s l s
e lsb
b
c
c
K
4
1
,P
l eJ
3
,l
,
s
i
,
j
,
m
。 對 E 個單元的(3-31)式進行總體合成,則有:
K
A
P
P
P
P
A
A
A
K
K
K
K
K
K
K
K
K
A
W
A
W
A
W
N N NN N N N N N
2 1 2 1 2 1 2 22 12 1 21 11 2 1 (3.32) 式中,N 表示節點總數。若令:
) (0
0
0
1
0
0
0
1
0
0
0
1
0
0
0
m n m j i eh
(3.33) 則係數矩陣[K]和右端列向量﹛P﹜與三角形單元 e 的K
lse 和 e lP
)
,
,
,
(
l
s
i
j
m
存在以下關係:31
E e E e e e T e E e E e e e e T eP
P
h
P
K
h
K
h
K
1 1 ' 1 1 ' (3.34) 式(3-34)中,
e mm e jm e im e mj e jj e ij e mi e ji e ii eK
K
K
K
K
K
K
K
K
K
'
e m e j e i eP
P
P
P
' (3.35) 虛線處未寫出的元素皆為零,E 為求解區域離散三角單元總數。 由泛函數極值條件可知:
K
A
P
P
A
K
0
(3.36) 鐵心導磁材料的磁化曲線呈非線性,即式中μ不是常數,為磁感 應強度的非線性函數,由式(3-30)可知,式(3-36)所示的代數方程式 為一組非線性方程式,係數[K]是未知量矢量磁位{AZ}的非線性函 數。 非線性方程式的求解一般歸結為多次迭代求解同階的線性代數 方程式。常用的解法有欠松馳迭代法、最速下降法、牛頓-拉夫遜迭 代法、共軛梯度法與波前法等。本說明是採用波前法求解非線性方程32 式,波前法仍然是高斯消元的一種形式,只是該方法中組裝單元剛度 矩陣與消元是同時進行的。在實際消元過程中,它不是等到有單元全 部組裝進整個剛度矩陣後再進行,而是將與此節點相關的所有單元 (即連接此節點的單元)組裝進整個剛度矩陣就開始消元了,把已完成 消元的結果寫入文件,釋放占用的內存,再存放其他數據,再進行消 元,最後從文件中讀出消元結果求節點移位。這種交替進行的方法, 占用計算機內存小,可以求解大規模問題,在求解電機內部電磁場時, 它具有求解時間短、收斂性好的特點[5]。下面將有限元素法的全過 程簡要地歸納成四個步驟: 列出與偏微分方程邊值問題等價的條件變分問題。 將區域作三角形單元剖分,併在單元中構造出線性插值函 數。 將能量泛函的極值問題轉化為能量函數的極值問題,建立線 性代數方程式。 求解線性代數方程式。
33 3-3 Maxwell 軟體簡介 Maxwell 是由 Ansoft 公司所開發出的一套方便以及簡單使用的電 磁場模擬套裝軟體,此軟體是以有限元素法(FEM)做基礎,可以模擬 磁場與電場相關領域之特性,其中包含靜磁場、瞬態磁場、暫態磁場、 靜電場、瞬態電場及暫態電場等 6 種與電跟磁相關的模擬,可借由選 擇不同物理特性之線性、非線性、等向性與非等向性之材料進行模擬。 Maxwell 可用來應用於以下幾項地方:工業、運輸、資訊設備等,例 如工業機器人、半導體製程設備、自動化設備、電梯、冷氣機、捷運 電動列車、電動汽車、影像掃描器、電射印表機…等等。不管是在工 作上或是生活上,馬達、發電機已成為不可或缺的物品,這些用到電 的物品都可以使用 Maxwell 套裝軟體進行模擬[5]。 因此本論文將使用 Maxwell 套裝軟體,對磁浮軸承進行模擬,並 且觀查磁浮軸承斷面的內部磁場變化,以便使磁浮軸承在製造前,能 夠預先知道磁浮軸承之力的分布的變化,以利於磁浮軸承的後續製造 作業。
34 3-4 永久磁鐵反斥基本理論 永久磁鐵反斥浮上是利用永久磁鐵同級間的磁反斥力為磁浮力 圖(3-1 a),在反斥浮上方式,上浮方向 z 的本質是安定,但橫向 y 的方向是不穩定,所以需要在橫向 y 的方向加上電磁鐵或磁鐵控制, 使運作穩定。圖(3-1 a)為永磁式磁鐵反斥浮上 z 的基本模型,在圖 (3-1 a)是單一永久磁鐵,在位置上浮方向 z 是安定的,但橫向 y 為 不安定。圖(3-1 b)為兩永久磁體配置減低橫移力 y 的變化。在下圖 中永久磁鐵的中央為座標原點,設行進方向為 x、橫移方向為 y、上 浮為 z。 a.一對一磁鐵配置解析模型 b.二對一磁鐵配置模型 圖 3-1 永久磁鐵箱斥配置模型 分析永久磁鐵時當成圖的電流模型。打永久磁鐵定量化的方式以體積 電流密度 I[A/mm2 ]和表面電流密度 K[A/m]表示永久磁鐵的磁化 J[T], 則各電流密度為,m 為垂直於磁鐵表面的單位向量。[4]
35 圖 3-2 永久磁鐵的等值側面電流模型 運用稀土磁鐵時屬於高保持性磁鐵,所以磁鐵的全體均勻磁化。因永 久磁鐵為直方體,體積電流密度 I 為零,在非磁極面上(A,B,C,D)繞 一圈的面電流值是設 J=︱J︱,成下式 [A/m2 ] (3.1) [A/m] (3.2) K=J/ 0 (3.3) 如此以等值側面電流表現永久磁鐵。 任意位置 P(x,y,z)的磁束密度 B[T]可用 Biot-Savart 定律計算,用於 上下磁鐵面電流間的電磁力,對永久磁鐵全體球得斥力 F[N]。分別 計算上磁鐵和下磁鐵的力,把他們合成可求得在圖(3-1 b)磁鐵配置 的斥力,關係式如下:
36 F=[Fx,Fy,Fz] [N] (3.4) Fx=0 (3.5) Fy=k[[[[A-C] ] ] ] +k[[[[ [A-C] ] ] ] 3.6) Fz=k[[[[A-C] ] ] ] +k[[[[[ A-C] ] ] ] (3.7) k=a1(J1J2/4 0) A=2(z1-z2) z1-z2)/(y1-y2)} B=2(y1-y2) z1-z2)/(y1-y2)} C= (y1-y2) (y1-y2) 2 +(z1-z2) 2 } D=(z1-z2) (y1-y2) 2 +(z1-z2) 2 } 由上式得知斥力取決於磁鐵尺寸(長 a1、寬 b1b2、厚 c1c2、間隔 d)、 磁化強度 J1J2、上磁鐵位置(橫移位移 y、高度 h)。圖(3-2)磁鐵配置 是(3.4)~(3.7)設 d=0。 斥力特性為磁鐵尺寸的函數,把永久磁鐵的尺寸、配置等最適化, 藉永久磁鐵間的互作用力即可安定懸浮,永久磁鐵反斥浮上系統會成 為理想的浮上系統。[4]
37 第四章有限元素模型建立 4-1 研究方法與步驟 本文所研究的 Halbach 磁排列方法,所產生的力與傳統的來做為 比較,在相同的環境因素下所產生的磁力線分布,與磁鐵強度分佈圖 來分析為何 Halbach 會較傳統的優良[1][2][3]。就以現有的實體模 型作為基準來建立模型,實體模型較為複雜所以將模擬的模型簡化, 也將做理想化的磁排列做分析。 軟體模擬主要可分為前處理、軟體計算和後處理等三個部份,前 處理部份是將 Halbach 建立模型、網格劃分、相關參數設定與邊界條 件設定等。前處理完成後進行模擬求解,求出其力的負載[1][2][3]。 完成求解後再進行後處理,後處理的部份就是將求解所求得的數據結 果資料轉變成為圖型以利研究與分析。 運用 Anaoft 的繪圖程式畫出圖形,將圖形建檔置於圖庫內,以 方便所有圖形的一致性[1][2][3]。將所需要的磁鐵特性建檔置於模 組內。
38 1. 前處理(Preprocessing) 在前處理階段部份,配合實體所做的實驗作為基準,決定了 9 組磁排列(表 4-1)與 2 種磁鐵特性,建立斷面的磁鐵排列模型, 對模型進行網格劃分、設定相關參數與邊界條件,完成設定後將 模型進行模擬分析。處理流程如圖 4-1 所示。 圖 4-1 處理流程圖 建立模型 網格劃分 相關參數設定 設定邊界條件 後處理 結果與討論
39 建立模型 將搭配不同之參數的磁排列模型,利用軟體本身的 建模工具進行建模,如圖 4-2 所示)。在磁鐵原型式較為 複雜的形狀,是因為要在組裝時容易安裝在我們要的位 置上,所以在模擬時將磁鐵精簡到一個較為相等的立方 體,再來進行程式的模擬。精簡外型是為了要減少網格 的產生,模組的變化減到最低。 圖 4-2 磁排列結構剖面圖(A2B0)
40 網格劃分 磁排列之模型建立後,將模型作網格的劃分,如圖 4-3 所示,在網格的劃分上可以分為兩種,一種是手動 劃分,另一種是自動劃分。手動劃分就是自行設定網格 劃分的大小,自動劃分也就是讓軟體自行決定網格的大 小,在此將使用軟體手動劃分網格大小。 圖 4-3 雙層磁排列網格劃分剖面圖(A2B0)
41 相關參數設定 在磁排列模擬時,必須於軟體中輸入相關的設定參 數,例如:永磁體的磁向,永磁體的材料及所在的空間。 表 4-1 磁鐵特性 設定邊界條件 磁排列的邊界條件設定上,採用無窮邊界條件,在 磁場模擬時,無窮邊界的條件定義上,就是說磁排列的 週圍,並無可以干擾磁場或者是其它的因素,如果在模 擬考慮過多的因素,將導致模擬的變數過大,因此本研 究都不考慮其它的因素,只針對磁排列的磁鐵本身進行 模擬實驗。 Grad e
Br Hcj (min) Hcb(min) (BH)max
Max-te mp T kGs kA/m kOe kA/m kOe kJ/m3 MGOe ℃
30H 1.08~1. 13 10.8~1 1.3 1353 17.0 796 10.0 223-24 7 28-31 120 42H 1.28~1. 32 12.8~1 3.2 1353 17.0 955 12.0 318~34 2 40~43 120
42 後處理 Maxwell 2D 運用虛功的原理來計算靜磁力,如圖 4-4 所 示移動平板在虛位移 s 方向所受的力可運用下式表達: (4.1) 在式中,W(s,i)為系統的磁場儲能,i 為建立磁場的電 流為恆定值,在靜磁力計算過程中,平板實際並未移動, 平板外表的三角形剖分單元發生虛變,因此靜磁力的計 算只需要一次的求解。 圖 4-4 靜磁力計算系統
43 2. 模擬結果 經由軟體的計算,可以得到兩個磁性和一個不同的磁排 列九組模擬後的數據,九組數據位置如表 4-2 所示。分別為 單極向和 Halbach 磁排列,個別取軸向間距 A 為 2mm 和 5mm 及 10mm,及磁鐵間橫向間距 B 為 0mm 和 5mm 及 10mm 進行力 的比較結果如表 4-3 至表 4-5 及圖 4-6 至圖 4-8 所示。上述 諸圖反應出因高度 A 間距 B 的改變所產生力的變化,曲線運 用後處理去顯示磁力線的分布與密度,進而去了解磁場的密 度分佈[2]。 圖 4-5 Halbach 磁極方向 表 4-2 分配表 單位:mm B A 2 5 10 0 x x x 5 x x x 10 x x x
44 磁鐵特性為 N30H 的 Halbach 數據 表 4-3 N30H 的 Halbach 數據 B A 2 5 10 0 529.13 405.09 261.19 5 395.63 304.82 222.35 10 330.9 252.07 181.44 單位:牛頓(N) 圖 4-6 Halbach-N30H 力分布圖 0 100 200 300 400 500 600 0 2 4 6 8 10 12 磁力 (N ) A間距 (mm)
Halbach-N30H
B間距0 B間距5 B間距1045 磁鐵特性為 N42H 的 Halbach 數據 表 4-4 N42H 的 Halbach 數據 B A 2 5 10 0 1228.1 969.37 641.43 5 937.88 742.8 554.94 10 789.59 618.17 456.44 單位:牛頓(N) 圖 4-7 Halbach-N42H 力分布圖 0 200 400 600 800 1000 1200 1400 0 2 4 6 8 10 12 磁力 (N ) A間距(mm)
Halbach-N42H
B間距0 B間距5 B間距1046 磁鐵特性為 N30H 的單極向數據 表 4-5 N30H 的單極向數據 B A 2 5 10 0 121.94 103.66 75.52 5 129.4 86.19 54.45 10 175.15 92.4 51.6 單位:牛頓(N) 圖 4-8 N30H 力分布圖 0 20 40 60 80 100 120 140 160 180 200 0 2 4 6 8 10 12 磁力 (N ) A間距(mm)
N30H
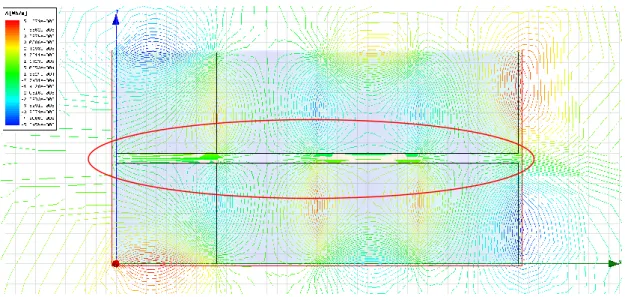
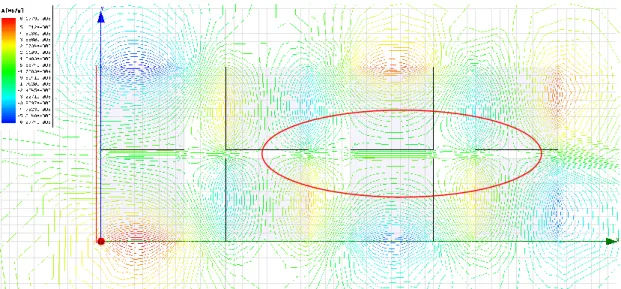
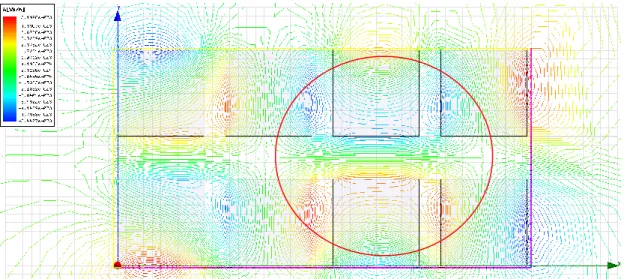
B間距0 B間距5 B間距1047 第五章結果與討論 5-1 磁力線變化 磁力線在圖(5-1)2mm 和 B 間距 0mm 時 Halbach[1][2]排列法比一 般的排列法密集,但是在間距變大時會遞減磁力的強度。分別取磁力 線 A 做比較時圖(5-1),可以看見因排列方法的不同會有磁力線集中 的問題,一般的磁排列會因為強制並排會使他成為一個單一的磁鐵特 性圖(5-1 b),但如將排列改變鬆散時磁力線會變為獨立迴圈的磁力 線,不過強度會有變化,但變化也沒有固定性所以才沒有被廣泛使 用。 反觀 Halbach[1][2][3]的排列放法的穩定性較佳,也較有規則 性,在緊密排列時強度為最強的狀態,而在變鬆散時會規律的遞減, 在磁鐵特性不同時也會有相同的規律,在強力永久磁鐵的製作完善, 才可以加以運用在磁力軸承上,在集中性也較為平坦不會有不規則狀, 而在強化的那一面現今廣泛的用在發電機及電動機上,是因為要將磁 力線集中一邊加以的利用,而較弱的一面也不會影響到機器的運作。 磁力線 A 當位置在 A2B0 時三種的強度是 HalbachN42H 為最強其次是 HalbachN30H,最弱是一般單向排列。在相同的排列下位因為磁鐵的 強度會有所改變,並也會改變其密集度。如下圖(5-1)顯示在改變橫
48 向間距 B 距離時從 0mm 變為 5mm 和 10mm 所改變如下圖: (a)HalbachN30H (b)N30H 圖 5-1 A2B0 磁力線 (a)HalbachN30H 和 (b)N30H 磁力線的密集度不相同進而影響力的集中度圖(5-1 a b),且集中的 位置也不盡相同圖(5-1 a b)紅色所框的位置。 A2B0 HalbachN30H-529.13Nt 和 N30H-121.92Nt
49
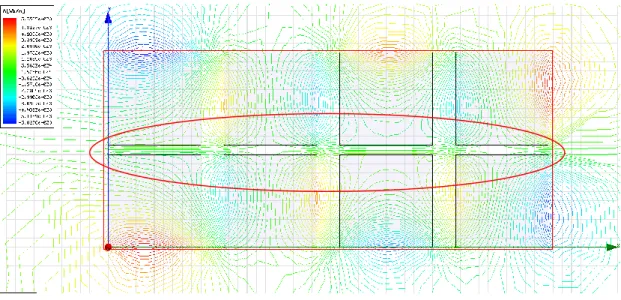
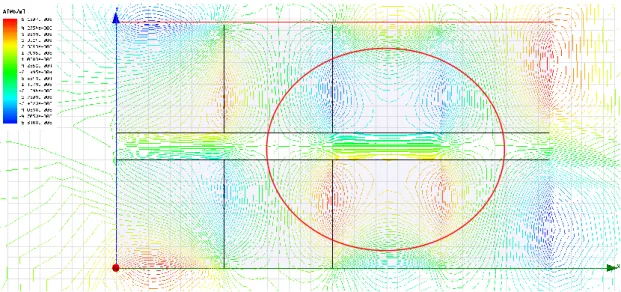
(a)HalbachN30H
(B)HalbachN42H
圖 5-2 A2B0 磁力線(a)HalbachN30H 和 (b)HalbachN42H
在相同的排列下會因材料的不同,而產生最大值上的差異。如圖(5-2 a)最大值為 5.358e-003 Wb/m 則圖(5-2 b)最大值為 8.5329e-003 Wb/m。
50
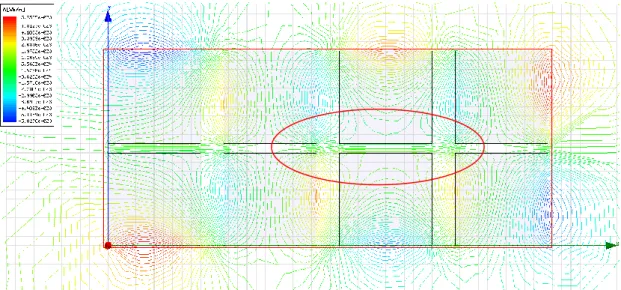
(a) HalbachN30H
(b)N30H
圖 5-3 A2B5 磁力線(a) HalbachN30H 和(b)N30H
在圖(5-3 b) 橫向間距 B 為 5mm 時會改變圖(5-1 b)磁力線的密集度 及位置,而圖(5-3 a)只是比圖(5-1 a)鬆散而已,磁力線密集的位置 不會改變。
51
(a) HalbachN30H
(b) HalbachN42H
圖 5-4 A2B5 磁力線(a) HalbachN30H 和(b) HalbachN42H 在圖(5-4) 橫向間距 B 為 5mm 強度是也是圖(5-4 b)最大值
5.7585e-003 Wb/m 比圖(5-4 a)最大值 9.3765e-003 Wb/m2 的數值大。 A2B5 HalbachN30H-395.63Nt 和 HalbachN42H-937.88Nt
52
(a) HalbachN30H
(b) N30H
圖 5-5 A2B10 磁力線(a) HalbachN30H 和(b)N30H
在圖(5-5 b ) 橫向間距 B 為 10mm 時變化就更明顯在一般的排列磁力 線都集中在磁鐵間,但圖(5-5 b)磁力線集中的方式還是集中在上下 的縱向間距 A 內。
53
(a)HalbachN30H
(b) HalbachN42H
圖 5-6 A2B10 磁力線(a)HalbachN30H 和(b) HalbachN42H 在圖(5-6) 橫向間距 B 為 5mm 強度是也是圖(5-6 b)最大值
1.0018e-002 Wb/m 比圖(5-6 a)最大值 6.1779e-003 Wb/m 的數值大。 A2B10 HalbachN30H-330.9Nt 和 HalbachN42H-789.59Nt
54
在縱向間距 A 變化為 5mm 時所產生的變化對應 A=2mm 時,因為高 度的改變會使磁斥力減弱,但磁力線圈的密度就沒有之前的密集。在 橫向間距 B 也在改變時磁力上也有變化,不過整體上跟 A=0 時大致相 同。
55 (a)HalbachN30H (b) N30H 圖 5-7 A5B0 磁力線(a)HalbachN30H 和(b) N30H 在圖(5-7 b)橫向間距 B 為 10mm 時變化就更明顯在一般的排列磁力線 都集中在磁鐵間,但圖(5-7 b)磁力線集中的方式還是集中在上下的 縱向間距 A 內。 A5B0 HalbachN30H-405.09Nt 和 N30H-103.66Nt
56
(a)HalbachN30H
(b)HalbachN42H
圖 5-8 A5B0 磁力線(a)HalbachN30H 和(b) HalbachN42H 在圖(5-8)橫向間距 B 為 0mm 強度是也是圖(5-8 b)最大值
8.3539e-003 Wb/m 比圖(5-8 a)最大值 5.1307e-003 Wb/m 的數值大。 A5B0 HalbachN30H-405.09Nt 和 HalbachN42H-969.37Nt
57 (a)HalbachN30H (b) N30H 圖 5-9 A5B5 磁力線(a)HalbachN30H 和(b) N30H 在圖(5-9)橫向間距 B 為 10mm 時變化就更明顯在一般的排列圖(5-9 b) 磁力線都集中在磁鐵間,但圖(5-9 a)磁力線集中的方式還是集中在 上下的縱向間距 A 內。 A5B5 HalbachN30H-304.82Nt 和 N30H-86.19Nt
58
(a)HalbachN30H
(b)HalbachN42H
圖 5-10 A5B5 磁力線(a)HalbachN30H 和(b) HalbachN42H 在圖(5-10)橫向間距 B 為 5mm 強度是也是圖(5-10 b)最大值
8.9639e-003 Wb/m 比圖(5-10 a)最大值 5.4672e-003 Wb/m 的數值大。 A5B5 HalbachN30H-304.82Nt 和 HalbachN42H-742.8Nt
59 (a)HalbachN30H (b) N30H 圖 5-11 A5B10 磁力線(a)HalbachN30H 和(b) N30H 在圖(5-11)橫向間距 B 為 10mm 時變化就更明顯在一般的排列圖(5-11 b)磁力線都集中在磁鐵間距 B 內,但圖(5-11 a)磁力線集中的方式還 是集中在上下的縱向間距 A 內。 A5B10 HalbachN30H-252.07Nt 和 N30H-92.4Nt
60
(a)HalbachN30H
(b)HalbachN42H
圖 5-12 A5B10 磁力線(a)HalbachN30H 和(b) HalbachN42H 在圖(5-12)橫向間距 B 為 5mm 強度是也是圖(5-12 b)最大值
9.7679e-003 Wb/m 比圖(5-12 a)最大值 5.9833e-003 Wb/m 的數值大。 A5B10 HalbachN30H-252.07Nt 和 HalbachN42H-618.17Nt
61
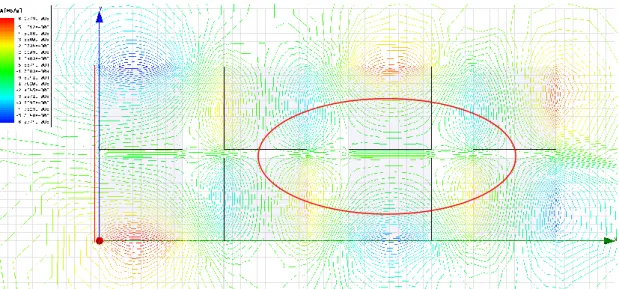
如圖(5-13)縱向間距 A 為 10mm 時變化的情形更為明顯,磁力線 的密集度和平整性都大幅度的變化。可以看見間距 A 上的變化變大時, 會出現磁力線空缺的的方開始變多變大,變的更不平整。
62 (a)HalbachN30H (b) N30H 圖 5-13 A10B0 磁力線(a)HalbachN30H 和(b) N30H 在圖(5-13)橫向間距 B 為 10mm 時變化就更明顯在一般的排列圖(5-13 b)磁力線都集中在磁鐵間距 B 內且偏集中在外側,但圖(5-13 a)磁力 線集中的方式還是集中在上下的縱向間距 A 內。 A10B0 HalbachN30H-261.19Nt 和 N30H-75.52Nt
63
磁力線(a)HalbachN30H
磁力線(b)HalbachN42H
圖 5-14 A10B0 磁力線(a)HalbachN30H 和(b) HalbachN42H 在圖(5-14)橫向間距 B 為 5mm 強度是也是圖(5-14 b)最大值
9.7888e-003 Wb/m 比圖(5-14 a)最大值 5.6447e-003 Wb/m 的數值大。 A10B0 HalbachN30H-261.19Nt 和 HalbachN42H-641.43Nt
64 磁力線(a)HalbachN30H 磁力線(b) N30H 圖 5-15 A10B5 磁力線(a)HalbachN30H 和(b) N30H 在圖(5-15)橫向間距 B 為 10mm 時變化就更明顯在一般的排列圖(5-15 b)磁力線都集中在磁鐵間距 B 內,但圖(5-15 a)磁力線集中的方式還 是集中在上下的縱向間距 A 內。 A10B5 HalbachN30H-222.35Nt 和 N30H-54.45Nt
65
磁力線(a)HalbachN30H
磁力線(b)HalbachN42H
圖 5-16 A10B5 磁力線(a)HalbachN30H 和(b) HalbachN42H 在圖(5-16)橫向間距 B 為 5mm 強度是也是圖(5-16 b)最大值
8.6032e-003 Wb/m 比圖(5-16 a)最大值 5.1998e-003 Wb/m 的數值大。 A10B5 HalbachN30H-222.35Nt 和 HalbachN42H-554.94Nt
66 磁力線(a)HalbachN30H 磁力線(b) N30H 圖 5-17 A10B10 磁力線 a)HalbachN30H 和(b) N30H 在圖(5-17)橫向間距 B 為 10mm 時變化就更明顯在一般排列圖(5-17 b) 磁力線都集中在磁鐵間距 B 內,但圖(5-17 a)磁力線集中的方式還是 集中在上下的縱向間距 A 內。 A10B10 HalbachN30H-181.44Nt 和 N30H-51.6Nt
67
磁力線(a)HalbachN30H
磁力線(b)HalbachN42H
圖 5-18 A10B10 磁力線(a)HalbachN30H 和(b) HalbachN42H 在圖(5-18)橫向間距 B 為 5mm 強度是也是圖(5-18 b)最大值
9.1916e-003 Wb/m 比圖(5-18 a)最大值 5.5897e-003 Wb/m 的數值大。 A10B10 HalbachN30H-181.44Nt 和 HalbachN42H-456.44Nt
68 5-2 磁強度 H 圖形變化跟始量磁位的變化相似。在此可以看檢磁鐵內部強的變 化形式,在強度上都集中在磁場方向為水平的那兩顆磁鐵的單邊上, 不過一邊集中在一個點上而已,也沒有很大的範圍。如下圖所示: 磁強度 H (a)HalbachN30H 磁強度 H (a) N30H 圖 5-19 A5B5 磁強度 H (a)HalbachN30H 和(b) N30H
69
磁強度 H (a)HalbachN30H
磁強度 H (a)HalbachN42H
圖 5-20 A5B5 磁強度 H (a)HalbachN30H 和(b) HalbachN42H 在上列圖(5-20 b)所示在 Halbach 的排列方式磁場強度都集中在 幾個鄰境的角落,而圖(5-20 a)一般的排列就集中在上下兩邊。
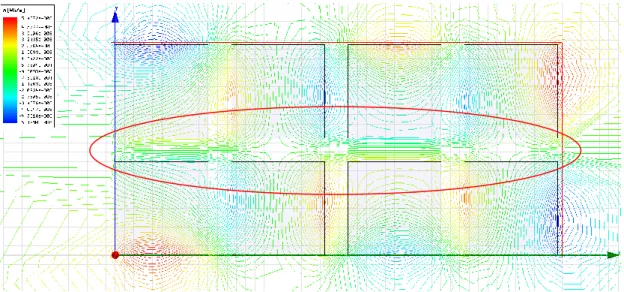
70 5-3 磁感應強度 B 主要時顯示外在的磁的密度變化,也是位因為 A B 的變化而改變 集中和強度的範圍。如下圖所示: 磁感應強度 B (a) HalbachN30H 磁感應強度 B (b) N30H 圖 5-21 A5B0 磁感應強度 B (a)HalbachN30H 和(b) N30H 由上圖(5-21 a)可以看出磁感應強度都集中在是下縱向 A 的間距 內,但圖(5-21 b)就集中在兩側。
71
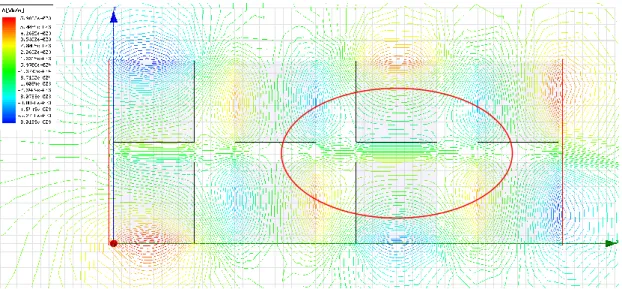
磁感應強度 B (a)HalbachN30H
磁感應強度 B (b)HalbachN42H
圖 5-22 A5B0 磁感應強度 B (a)HalbachN30H 和(b) HalbachN42H 在圖(5-22)相同的排列下影響的因素就只有材料的不同而已,強 度也集中在縱向 A 之間。以及幾個小角落。