行政院國家科學委員會專題研究計畫 成果報告
TFT-LCD 廠製程排氣系統之最佳化設計與節能運轉分析
研究成果報告(完整版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 96-ET-7-002-010-ET 執 行 期 間 : 96 年 01 月 01 日至 96 年 12 月 31 日 執 行 單 位 : 國立臺灣大學機械工程學系暨研究所 計 畫 主 持 人 : 陳希立 計畫參與人員: 博士班研究生-兼任助理:黃翔聖、鄭喬鴻、張至中 處 理 方 式 : 本計畫可公開查詢 中 華 民 國 97 年 02 月 18 日行政院國家科學委員會/經濟部能源局
「能源科技學術合作研究計畫」成果報告
計畫名稱
TFT-LCD 廠製程排氣系統之最佳化設計
與節能運轉分析
計畫類別:
■
個別型計畫 □ 整合型計畫
計畫編號:
96-ET-7-002-010-ET
執行期間:2007 年 1 月 1 日至 2007 年 12 月 31 日
計畫主持人:陳希立
計畫參與人員:
黃翔聖、鄭喬鴻、張至中
成果報告類型(依經費核定清單規定繳交): □ 精簡報告
■
完整報告
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究
計畫、列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,
□一年□二年後可公開查詢
執行單位:
國立臺灣大學機械工程學系暨研究所
中 華 民 國
97 年 2 月 25 日
摘要
本研究擬採用動態規劃法與回饋模擬法於 TFT-LCD 廠製程排氣 系統之創新設計方法,其結合電腦輔助設計與模擬的方式,來提供系 統最佳化設計與實際節能的全方位製程排氣系統設計方法。本研究首 先將動態規劃法應用於此案例之中,在滿足各種幾何、風量以及生命 週期成本最低等限制下,獲得系統的最佳化設計與設備規格選用,並 探討該案例在採用不同傳統設計方法時的設計結果,並比較動態規劃 法與傳統設計方法間優、缺點,而後利用回饋模擬法針對前一階段的 設計結果,進行系統在不同運轉策略下實際狀況的模擬,如以檔板控 制及變頻控制下,探討包括各管段的風速、全壓降及風機耗能狀況等 項目。以檔板與風機變頻控制之下,與機台全轉速運轉相比,節能效 益分別可達64 %和 63 %。 關鍵字:製程排氣系統、動態規劃法、回饋模擬法、最佳化設計Abstract
This study adopts Dynamic Programming Method (DPM) and Feedback Simulation Method (FSM) combing computer assisted design and simulation method to provide the total solution for both system optimal design and actual energy saving in the TFT-LCD manufacturing exhaust system. In this study, the actual running performance under each kind of the limitation of geometry, flow rate and the lowest life period cost is studied by DPM to get the optimal design and the best equipment size. The design results in this TFT-LCD system are also investigated by different traditional design methods and compared with DPM. From the results of DPM, using FSM simulates the actual system under different operating strategies, such as damper control and variable-speed fan control, including air flow velocity, total pressure drop and power consumption of fans in each pipe. The simulation results show that under damper control and variable-speed fan control, the energy saving benefit compared with full operating conditions can be achieved 64 % and 63 %, respectively.
Keywords: Feedback simulation method, Dynamic programming method, Optimal Design.
一、 前言
製程排氣系統為工業廠房中最有效控制空氣污染物的方法,製程 排氣系統設計的好壞不但關係到整個製程生產的良率,也牽動了製程 的穩定生產與否,尤其對於電子半導體產業而言,當製程排氣系統排 氣量不足時,導致整個製程良率急速的下降,造成生產成本的增加。 因此,如何設計一個最佳化的製程排氣系統對於工業廠房而言是十分 重要。 一個最佳化的製程排氣系統設計,必須同時決定系統設備的尺寸 與系統運轉的額定問題,系統設備尺寸的設計在各機台設備的風量要 求下與速度條件及空間大小的限制條件下,得到系統在全載運轉時, 起始成本與運轉成本最佳化的考量下,得到最佳化的風機設備規格與 管徑尺寸。系統運轉的額定問題,是針對已設計好或已存在的製程排 氣系統,在全壓平衡下,滿足各機台設備所需之風量,並可在降載的 運轉情況下,得到節約能源的控制策略。二、 研究目的
本研究為解決傳統設計方法的缺點,提出以動態規劃法(dynamic programming method)針對 TFT-LCD 廠製程排氣系統進行最佳化設 計,並且利用回饋模擬法(feedback simulation method)以電腦輔助模擬的方式,分析 TFT-LCD 廠製程排氣系統在不同負荷下的實際運
轉狀況,並針對系統在不同運轉策略下的節能效益進行評估,依此提 出 有 效 的 節 約 能 源 運 轉 策 略 , 且 動 態 規 劃 法 與 回 饋 模 擬 法 於 TFT-LCD 廠製程排氣系統之創新運用,除了可使用於新設系統最佳 化設計與設備尺寸選用外,亦可針對已設計完成或既有之製程排氣系
統進行模擬,並提供最佳化的節能額定運轉策略,為一種可以同時滿 足系統設備最佳化設計與實際節能運轉策略的全方位空調設計方法。
三、 文獻探討
傳統的系統設備尺寸的設計方法如等速度法(velocity method)、
等摩擦法(equal friction method)[1]或靜壓再得法(static regain
method)[2,3],均是基於便於快速設計和不同系統需求的條件下所發 展出來的。這類的風管設計方法無法設計出一個全壓平衡的系統。 Tsal 等於 1988 年至 1998 年間陸續提出 T 設計方法[4-8],以嚴謹的數 學模式並藉由迭代之方式進行風管系統最佳化設計,可使系統設備尺 寸具有最小之生命週期成本及系統壓力平衡等優點,但是其計算程序 繁複且無法針對流速或管徑尺寸作控制,而無法獲得普遍使用。 Asiedu 等於 2000 年[9]提出遺傳演算法作為管路通風系統設備尺寸設 計,其概念亦加入了生命週期成本作為目標函數。 為了同時滿足風量的要求和流速限制、系統壓力平衡與成本最佳 化的條件,Chen [11]首先將動態規劃法應用於通風系統,並建立最小 生命週期成本的最佳化設計。陳等[11]與陳等[10]對於動態規劃法的 分析,將其研究成果應用於複雜的酸性氣體製程排氣系統,並與傳統 的設計方法作一比較,顯示動態規劃法於速度、尺寸以及全壓平衡等 限制條件下,可有效的得到最佳化的製程排氣系統。本文將以酸性製 程排氣系統為案例[10,11],說明動態規劃法應用於排氣系統設備尺寸 最佳化設計的特性、計算流程、最佳化策略與分析結果並作為回饋模 擬法之分析模型。 由於動態規劃法的設計結果,忽略了系統運轉的額定問題,使得
在設計階段無法瞭解系統實際運轉情形與運轉策略,必須藉由模擬分 析方法來解決此問題。在風管的模擬分析的技術上,Tsal 等於 1990 年[6]首先提出管路系統模擬的方法,主要包含了系統收縮、風機操 作點選擇及系統展開等步驟。此模擬方法採用開迴路模擬方式,只具 備單純模擬性能而缺乏修正的功能,故僅限使用於較單純之系統,而 對於複雜性高的製程排氣系統而言並不適用。Chen 等於 2001 年[12] 提出 3C 法,主要包含三個步驟(1)電腦輔助設計,(2)電腦輔助模擬, (3)修正程序。其以電腦輔助模擬方式進行風量的平衡與調整。由於 3C 方法所使用的修正程序,需要配合豐富實務經驗所建立的修正法 則,往往無法收斂至平衡狀態,且容易造成人為計算誤差。為了改進 3C 方法之設計缺失,本文將提出新的回饋模擬法,透過數學模式建 立自動的修正程序,可減少人為誤差,並減少對設計者經驗的依賴。 回饋模擬法是為了在設計階段,模擬與分析系統實際運轉情形與 運轉策略的額定問題,回饋模擬法之特性在於引入了回饋控制之觀 念,以改善傳統模擬方法單向性之缺點,並根據系統的特性,建立一 套系統修正準則,來修正下一次輸入的參數,如此反覆的回饋與修 正,直到系統平衡時模擬才結束。有別於傳統的模擬方法,回饋模擬 法中之修正法則是根據風機與排氣系統之特性而建立的,藉由此修正 法則進行模擬修正,可有效的減少模擬時修正次數,進而縮短所需時 間。本文以回饋模擬法,針對風門控制與風機變頻控制二種運轉策略 進行模擬,並比較節能效益,讓設計者除了以動態規劃法設計出一最 佳化製程排氣系統外,亦可於設計階段暸解系統實際運轉情形與運轉 策略,增加設計的彈性。
四、 研究方法
(一) 動態規劃法 動態規劃法是一種計量的運算技巧,用以分析各種複雜的多階段 決策程序,以尋求最有利的策略來解決連續性的決策問題,並在滿足 限制條件下使預期的目標函數為最大或最小。就製程排氣系統最佳設 計而言,是在各機台的抽風量為已知的條件下,找出系統全壓平衡 下,總壓降為最佳的管路組合,得到系統所需風機的規格與管徑尺寸 大小,以達到包括起始成本與運轉成本總成本的最佳化,因此需以系 統的生命週期成本(life-cycle cost)為最佳化目標函數,透過最佳管徑 及最佳風機全壓的選擇,使生命週期成本達到最低,目標函數可以表 示為: ( s p E=E +E PWEF) (1) s E 為初始成本,包括了風機、風管、管件與大小頭等設備之成本, 為運轉能源成本,包括了風機之耗電量, 為現值上升因子。系 統的初始成本為傳輸導管每單位面積成本乘上該管段的總表面積,對 於圓形管段可表示為: p E PWEF ( s d E =S πDL) (2) d S 為導管的單位面積成本(元/m2),L為管段長度(m),D為圓形管段之 直徑(m)。系統的能源成本主要來自風機,風機之運轉成本(元/year) 可表示為: 6120 fan fan p f e Q P c E E Y η η = ⋅ ⋅ (3) fanQ 為風機之風量(m3/sec),Pfan為風機全壓(kPa),ηf 為風機效率,ηe為
驅動馬達之效率, 為電力單價(元/kW-hr), 為系統年運轉時數
(hr/year)。
c
本文將以酸性氣體之製程排氣系統為例,說明動態規劃法設計程 序與步驟,並得出最佳化製程排氣系統所需設備規格與尺寸,做為回 饋模擬法之分析模型。圖1為酸性氣體製程排氣系統配置圖,包含了 煙囪、風機與管段配置及編號,本系統中共有56條管段,各管段長度 與抽風量如表1所列。系統中包含了14台機台,分別配置於各管段末 端處,由風機至各機台處可劃分成14條路徑,酸性氣體製程排氣系統 各路徑資料如表2所列。本系統所使用之工作流體為空氣,密度為1.2 kg/m3、黏度為1.54 10 m s× −5 2 ,系統使用圓形風管,風管絕對粗糙度為 0.00015m,限制條件為管段的直徑或風速,本系統中最大管段直徑值 為1.5公尺,最大風速為15 m/s,最小風速為5 m/s。 動態規劃法計算的法則是將問題依照程序分解為許多彼此相連 的局部問題,而使問題簡化。所以計算的程序首先為設置節點,節點 的設置原則為「管路分歧點以及回風口處必須設置節點」。圖2為依 據此原則所設定之系統節點配置圖。接著進行系統的層級配置,進行 層級配置時,第一層必定是與出氣口(或回風口)端有關,而最後一層 則是風機側,分層的原則為「第n+1 層節點所需的資料需包含第n 層 的已知結果」,依據此原則本系統中共分成10層級,層級1中包含節 點1至節點14,而此14個節點分別與大氣連接,因此這14個節點的壓 力值均為0,層級2中包含節點15、16、17及18,層級3中包含節點19 及20,層級4中包含節點21及22,層級5中包含節點23,層級6中包含 節點24,層級7中包含節點25,層級8中包含節點26,層級9中包含節 點27,層級10中包含節點28。 進行計算時,首先由管段末端處的節點開始計算,並逐層計算至 靠近風機側的節點。考慮第 n 層中節點 i 的全壓為 k 時,表示成 ,(k 的範圍設定為 1 至 600 Pa,並以 1 Pa 作為每次計算的增量), , k i n P = k
且 最大值必須大於本系統設計風量下所提供之全壓,故選定 600 Pa 作為最大值。而計算第 n 層節點的資料時,需以第 n-1 層的計算結 果作為基礎,則第 n 層節點 i 與其相連接的第 n-1 層節點 j 間全壓損 失表示為 , k i n P , , , k k i j n i n j n P− P P Δ = − −1 ( k , 0 i j n P− Δ > n = 2 ~ 10) (4) 在管路系統中,全壓損失等於摩擦損失與動態損失總合,則上式可表 示為
(
)
(
)
(
(
)
)
2 2 0.25 , , , , , 2 4 , 2 4 , , , , , 16 16 17 0.11 2 2 k k k k i j n i j n i j n i j n k k i j n k k k k i j n k i j n i j n i j n i j n i j n Q Q D L P C D Q D D D π ν ε ρ ρ π π − − − − − − − − − − − ⎡ ⎛ ⎞ ⎛ ⎞⎤ ⎛ ⎢ ⎜ ⎟⎥ ⎜ Δ =⎢ ⎜⎜ + ⎟⎟ ⎜ ⎟⎥+ ⎜ ⎝ ⎠ ⎝ ⎠ ⎝ ⎣ ⎦ ⎞ ⎟ ⎟ ⎠ (5) 於(5)式中,ε 為絕對粗糙度 (m),ν 為運動黏度 ( 2 m s),ρ為密度 ( 3 kg m ), 為第 n 層節點 i 至節點 j 間管段水力直徑 (m), 為 第 n 層節點 i 至節點 j 間管段內流量 ( , i j n D− Qi j n− , 3 m s), 為第 n 層節點 i 至 節點 j 間管段長度(m), 為第 n 層節點 i 至節點 j 間配件之局部損 失係數。而(5)式中等號右邊第一項為節點 i 至節點 j 間摩擦損失,等 號右邊第二項為節點 i 至節點 j 間動態損失。 , i j n L− , i j n C− 藉由式(4),只要知道層級n中節點i的
全壓值後,即可算出節點 i至節點j間的管徑與風速,若是所計算的管徑或流速不在限制條件 內,將被剔除,若是在限制條件內,即可藉由式(2)計算初始成本 , , k s i j n E − 。接著再以k值每1 Pa的增量,計算出節點i在其它全壓值下所對 應之管徑、流速與初始成本,如表3所示,由此並可得到節點i在滿足 所有限制條件下最小初始成本。 當第 n 層的節點均計算完成後,接著計算第 n+1 層之節點,並以 第 n 層中最小初始成本的計算結果做為基礎,重複上面的計算步驟, 每一層級的計算結果中,僅有最小初使成本者可以被保留,並逐步向 上層依序計算後,直到靠近風機側的最後一層級,計算結束。將最後一層級所計算的結果代入目標函數中,經比較即可選取具有最小目標 函數值。此即為本系統在生命週期內之最小運轉成本及初始成本,並 為本製程排氣系統動態規劃法之設計結果,如表4 所示。 (二) 節能策略-回饋模擬法 為瞭解系統實際運轉情形與操作策略,本文以回饋模擬法針對動 態規劃法設計完成的系統進行分析,以模擬系統實際運轉的額定問題 (rating problem)。製程排氣系統回饋模擬法模擬流程如圖 3 所示,首 先步驟1 為起始參數的輸入,起始參數包括了工作流體的性質與導風 管的幾何性質,接著步驟 2 為模擬模型相關參數輸入,此步驟需將動 態規劃法設計完成之系統配置(如圖2 所示)、各管段長度與風機性 能曲線逐一輸入,並於步驟 3 輸入系統所需的限制條件,包括了安全 流速的上、下限或管徑的上、下限,接著則是進行步驟4 模擬理論的 建立,而回饋模擬法所使用的風管模擬理論係參考 Tsal 等[7]所提出 系統模擬方法,其主要包含了系統收縮、風機操作點選擇及系統展開 三個部分。 系統收縮主要目的為將一複雜的管路系統,收縮到只剩一虛擬管 段,並求出單一虛擬管段的等效流量傳導係數。於 Darcy-Weisbach 方程式中 2 2 8 t fL P C Q D ρ π 4 D− ⎛ ⎞ Δ =⎜ + ⎟⋅ ⋅ ⎝
∑
⎠ (6) 定義一係數μ,且 fL C D D μ =⎛⎜ + ⎞⋅ ⎝∑
⎠⎟ ,則體積流量與壓力損失之關係可 表示為 0.5 5 8 t D Q π μρ ⎛ ⎞ = ⎜ ⎟ ⋅ ⎝ ⎠ ΔP (7) 又定義一流量傳導係數 0.5 5 8 s D K π μρ ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ ,則(7)式可表示為s t Q=K ΔP (8) 藉由(8)式可開始進行系統收縮的步驟,系統收縮主要目的為將一複 雜的管路系統,收縮到只剩一虛擬管段,並求出單一虛擬導管的等效 流量傳導係數,不論多複雜的管路系統中,管路與管路相連接方式皆 為串聯、並聯與 T 型連接三種方式,以下將針對此三種管路相連方式 進行系統收縮步驟。 首先考慮串聯管路的系統收縮方式,如圖 4 中為一個兩管段串聯 的系統,將串聯的管路 1 與管路 2 收縮成單一虛擬管段 1-2,則此虛 擬管段1-2 須滿足以下限制條件 1 2 1 2 Q− =Q =Q (9a) 1 2 1 2 P− P P Δ = Δ + Δ (9b) 將(8)式帶入(9a)中 1 2 1 2 2 2 1 2 1 2 2 2 2 2 s s s Q Q Q K − K K − = + (10) 又將(9a)式帶入上式中,可得到串聯時虛擬管段 1-2 的等效流量傳導 係數
(
1 2 1 2 0.5 2 2 s s s K − = K − +K −)
− (11) 如圖 4(b)所示,考慮兩管段並聯的系統,將並聯的管路 1 與管收 2 收縮成單一虛擬管段 1-2,則此虛擬管段 1-2 須滿足以下限制條件: 1 2 1 2 Q− =Q +Q (12a) 1 2 1 2 P− P P Δ = Δ = Δ (12b) 由(8)式與(12a)式可得到並聯時虛擬管段 1-2 的等效流量傳導係數 1 2 1 2 s s K K K − = + s (13)如圖 4(c)所示,考慮一個由三管段以 Y 型或 T 型連接的系統, 欲將此系統收縮成單一虛擬管段 1-3,則此系統可視為管段 2 與管段 3 並聯後再與管 1 串聯,則收縮後虛擬管段等效流量係數為:
(
)
1 3 1 2 3 0.5 2 2 s s s s K K K K − − − − ⎡ =⎢⎣ + + ⎤⎥⎦ (14) 當系統收縮完畢後,複雜系統被簡化到只有風機與單一虛擬管 段,此虛擬管段之流量係數為Ksys,此時系統之風量與壓降的關係為sys sys sys
Q =K ΔP (15) 藉由(15)式即可得到系統流量與壓降之關係,並求得系統之阻抗曲 線,藉由系統阻抗曲線與風機性能曲線之交點即可求出風機的操作 點,而得到風機操作時所提供之全壓Pfan及風量Qfan。當風機之操作點 決定後,則開始進行系統展開的步驟,系統展開之目的為將收縮後的 系統展開成原系統,並根據各管段等效流量傳導係數Ksys將風機風量 分配到各管段,直到整個系統都展開為止,系統展開計算的方向恰與 系統收縮方向相反。當模擬理論的三個步驟(系統收縮、操作點選擇 與系統展開)建立完成後,即可開始進行模擬,模擬值與需求值於步 驟5 中所得之誤差必須介於 0 至 5%之間,若大於 5 %或小於零時, 則進行步驟6 的修正程序。 回饋模擬法步驟 6 修正程序的建立是基於全壓平衡的條件,假 設一排氣系統中有 N 條路徑,而各路徑中所需之風量分別為 、 …、 ,則系統需求之總風量為 1 Q 2 Q QN 1 n N sys n n Q = = ∑ = Q (16) 假 設 各 路 徑 上 由 於 管 段 與 閥 件 所 產 生 之 全 壓 損 失 分 別 為 、 …、 ,各路徑由於擋板開啟所產生之壓力損失分別為 ,1 T P Δ ,2 T P Δ ΔPT N, ΔPD,1、 ,2 D P Δ …、ΔPD N, ,則各路徑之總壓力損失為
, n T n D P P P Δ = Δ + Δ ,n 其中 n=1、2…N (17) 而在排氣系統中風車運轉時所提供之風量必須滿足各路徑所需風量 的總和,故風車運轉時所提供之總風量為 1 n N fan sys n n Q Q = Q = ∑ = = (18) 由於風車運轉時所提供之風量為已知,藉由風車性能曲線即可得到在 此操作狀況下風車之操作點,而藉由此操作點即可查出風車運轉時所 提供之全壓Pfan,各路徑所獲得之壓力也為Pfan fan n P = ΔP , (19) 為了滿足各路徑全壓平衡條件,則各路徑之全壓損失與擋板開啟所造 成壓力損失總合需等於風車運轉時所提供全壓 , fan T n D n P = ΔP + ΔP (20) 故在各路徑中擋板開啟所造成之壓力損失即可由(20)式中求得 , v n D C =Q ΔP n (21) 藉由(21)式中所得結果即轉換得到各路徑中擋板開啟角度,再回到步 驟4 內進行系統模擬步驟,完成固定機台負載的回饋模擬法的分析之 後,於步驟7 進行改變製程排氣機台負載的模擬。
五、 結果與討論
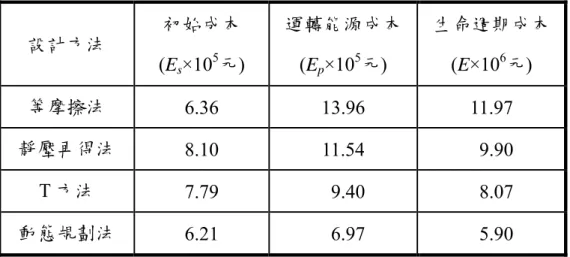
(一) 動態規劃法之最佳化設計 動態規劃法與傳統設計方法(等摩擦法、静壓再得法與T方法)設 計結果之差異,可針對系統中各路徑壓力損失、初始成本、能源運轉 成本與生命週期成本進行討論,以比較動態規劃法與傳統設計方法之 優缺點。圖5為各設計方法於不同路徑全壓損失比較圖,由圖中可看 出動態規劃法所設計之系統各路徑的全壓損失是最平衡的,這是因為其基本限制條件為全壓平衡,其次為T方法,雖然T方法亦可設計出 全壓平衡系統,但是必須在沒有流速或管徑等限制條件下,否則將無 法得出最佳化解。靜壓再得法設計的系統,是設定靜壓再得因子為 1.0,也就是設定分歧管上下游的靜壓相等,因此可以得到壓力均衡 但非最佳化的系統。等摩擦法所設計的系統壓力最不平均,這是因為 等摩擦法的基本假設為系統內所有管段的單位長度全壓損失都相 同。而本系統中各路徑的長度均不相等,因此當每條路徑總等效長度 相差很多時,所設計出的系統必然有嚴重的壓力不平衡性。 表5為各設計方法初始成本、能源運轉成本與生命週期成本比較 表,初始成本中導管單位面積價格為650 元/m2,能源運轉成本電價 以每千瓦小時1.96 元計算,風機與馬達效率則為80 %,假設此系統 將使用10 年,現值上升因子為8.567,年運轉時數則為8760 小時。 由各設計方法所設計之管徑所得出之風管的總表面積大小代表了初 始成本的高低。由動態規劃法設計之管徑的系統初始成本最低,這是 因為動態規劃法在管徑和風速做了最佳化的選擇,故初始成本最低, 等摩擦法次之,這是由於等摩擦法設計時,假設所有管段的單位長度 壓力損失皆相同,且流速由上游往下游處逐漸下降,所以管徑往下游 處也逐漸遞減而降低成本。而靜壓再得法所設計的系統初始成本較 高,這是因為其流速較低,所需管徑大,因而使初始成本較高。 表5所示之能源運轉成本以動態規劃法所設計的系統為最低,等 摩擦法為最高,這是因為動態規劃法所設計的系統,其風機操作點壓 力乘以風量為最低,而等摩擦法設計出壓力不平衡的系統,由於其是 依據全壓損失最大的路徑選用風機規格,造成風機提供的全壓力相對 的也較高,所以會有較高的能源運轉成本。生命週期成本為初始成本 與運轉能源成本的總合,由表5中可知,動態規劃法所設計的系統有
最低的生命週期成本,這是由於動態規劃法進行設計時考慮了生命週 期成本的觀念,所以會有一最低的生命週期成本。在比較其他傳統設 計方法的生命週期成本,可發現T方法也有一較低的生命週期成本, 但是T方法卻無法針對在限制條件下,進行一最佳化的設計,因此無 法兼顧到成本和流速的要求。 綜合上述所討論的結果,在製程排氣系統設計的考量因素中,包 含了流速限制、管徑限制、全壓平衡與成本最佳化。在傳統的設計方 法中,如等摩擦法與靜壓再得法,此兩種方法皆無法針對設計的考量 因素設計一最佳化系統,但等摩擦法的設計程序都相當簡易,對時間 較為緊迫且風量等設計的要求並不嚴苛時,可以考慮採用這種設計方 法,而靜壓再得法則可得到壓力平衡性不錯的系統,且所需的風機全 壓也較小,可減少系統運轉成本。 比較 T 方法與動態規劃法分析的結果可知,T 方法固然可以設計 出最小生命週期成本的風管系統,然其最佳化的基礎是建立在初始成 本與能源成本的兩者的擇佳結果,對於管徑及流速的要求較難兼顧。 因此,設計時若加入限制條件,各路徑的壓降也會有不平衡的現象發 生,且運算方法相當繁複。動態規劃法包含了生命週期成本最小化的 觀念,以致於所得出之設計結果,相較於其它方法能有較小的成本負 擔。其中,動態規劃方法於運算過程中可加入管徑與流速的限制,若 流速與管徑超過允許的範圍,將會被剔除。因此,所得結果均能滿足 所要求的管徑與流速範圍。如此,可設計出最接近實際狀況的系統。 過去動態規劃法的缺點為所須計算時間較長,已可由今日之電腦運算 能力補足,故以動態規劃法進行設計,是十分好的選擇,相對於其他 傳統設計方法,動態規劃法具有設計全壓平衡、最低初始成本、最低 運轉成本和生命週期成本等等優點,是相當好的設計方法。
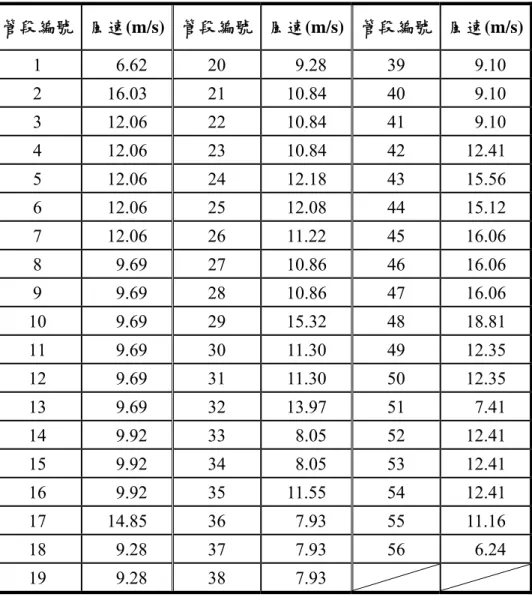
(二) 回饋模擬法的運轉策略 為瞭解系統實際運轉情形與運轉策略,以回饋模擬法針對動態規 劃法設計完成系統進行模擬,並分別模擬全部機台運轉與部分機台運 轉兩種情況。圖6 所示為製程排氣系統所使用的風機轉速分別於 100 %及 65 %運轉下之性能曲線,表 6 為當全部機台運轉時,第一次模 擬代表各路徑之風門為全開的情況,由表中可看出,路徑編號 13 有 最大風量誤差 29.77%,這是由於路徑 13 中管段 55 位於系統遠處末 端,容易造成計算誤差。另外將回饋模擬法各管段之風速列於表7, 由表7 可看出流速大部分落於限定範圍內,這是因為設計時動態規劃 法即可對流速作一範圍上之限制,經模擬後的結果亦顯示符合原設計 時的設定。 由於模擬的最大風量誤差大於 5 %,接著再使用回饋模擬法修正 程序進行修正。由各路徑所需求的風量可知總需求風量為 10.62 3 / m s ,再經由風機性能曲線,如圖 6 所示,可得到此時風機操作點 壓力為504 Pa。藉由(20)式可得到各路徑擋板之壓降ΔPD n, 。由(21) 式可以得到各路徑擋板 值,並將 值帶入軟體內進行第二次模擬, 得到如表8 之模擬結果。經過一次的修正程序後,即可使最大誤差降 到10 %以下,為了使各機台風量誤差皆小於 5%,接著進行第三次修 正調整,模擬結果如表9 之所列,各機台風量平均誤差均小於 5%。 本次模擬過程中,由模擬開始至模擬結束共花費了五分種,與實際現 場進行風量平衡與調整時,需 1 至 2 個月的時間比較,更可大大節省 許多時間與金錢。 v C Cv 接著針對部分機台運轉時進行模擬,並分別以風門控制與風機變 頻控制兩種不同運轉策略進行模擬。本文分別針對 1/2 和 1/3 機台運 轉時進行模擬,以驗證回饋模擬法的可用和迅速。首先將路徑2、3、
4、5、7、8、9 的機台關閉,以模擬系統在 1/2 機台停止運轉的情況。 表10 代表第一次模擬結果,最大風量誤差高達 125.46 %。此時以修 正程序進行修正。當 1/2 機台運轉時,各機台所需風量總和為 4.41 m3/s,藉由風機性能曲線可知道風機在此風量運轉下可提供之全壓為 685 Pa。根據本文所建立的修正準則,則各路徑風門所造成之壓降可 由式(20)求出,並藉由式(21)即可得到各擋板所需開啟角度,再 輸入於軟體中,即可以得到第二次模擬結果,如表11 所示。由表 11 之模擬結果,可看出風量平均誤差均在5 %以下,如圖 7 所示,而此 時風機所消耗功率為3.051 kW。接著將路徑 1、2、3、4、5、7、8、 9、10、11 共 10 條路徑關閉,以模擬 2/3 機台關閉的情形。表 12 為 風機全轉速下第一次模擬,誤差均大於 5 %。利用修正式(20)與 (21)可以求得各閥件所需之 並代入軟體模擬,可以得到如表 13 之結果,誤差均小於5%,此時風機消耗之功率為 2.202 kW。在 1/2 機台運轉和1/3 機台運轉情況下,由於風量需求較全部機台運轉所需 風量為小,故風機所需功率較少,而 1/3 機台又較 1/2 機台所需功率 為少。 v C 接著以風機變頻之運轉策略進行模擬,以比較風機變頻運轉時之 節能效益。由於風機所提供之壓力必須能使流體克服路徑中由於管路 和風門所造成得全壓損失,故在選擇風機轉速時須考量風機是否足以 提供適當的壓力,以克服管路中之全壓損失。由風機性能曲線可知當 風機轉速為940 rpm時,若提供 4.41 m3/s的風量,則風機提供之壓力 仍大於240 Pa,若風機轉速小於 940 rpm時,則不足以克服系統之全 壓損失。故風機轉速選擇在 940 rpm進行控制,再輔以風門控制風量。 表14 為風機變頻控制的模擬結果,各機台風量誤差皆小於 5%,如圖 7 所示,此時風機消耗功率為 1.093 kW,因此以風機變頻控制之方式
與 1/2 機台全轉速運轉相比,節能效益可達 64 %。接著以風機變頻 方式進行風量控制,由圖6 可看出利用 65%轉速風機來提供 2.87 m3/s 的風量,則風機可以提供之壓力為289.33 Pa,大於 240 Pa,再以風 門控制風量,利用式(21)求出各風門 值後進行模擬,可以得到表 3-15 各路徑之誤差均小於 5%之結果,如圖 7 所示,此時風機所耗功 率為0.816 kW,比較風機全速運轉可以節能達 63 %。 v C 在部份機台停止運轉的情形下,利用式(21)修正程序,以風門和 風機變頻的控制策略,使風量均落在誤差的範圍內。在廠房實際建造 完成開始運轉後,往往僅能以風門來調整,而無法對管路管徑做其他 的變動,故利用回饋模擬法修正程序對於實際運轉情形的確有很大的 便利性。 綜合本章,Chen 等[10,12]所提出之動態規劃法,設計了具有全 壓平衡、滿足風量需求與成本最佳化之酸性氣體製程排氣系統,並在 全部機台運轉下,利用回饋模擬法所得之模擬值和設計值比較得到相 同之結果,代表於全載時,動態規劃法是一全壓平衡最佳化設計方 法。但於機台降載的情況下,動態規劃法無法得出其運轉性能,此部 分有賴模擬來達成分析額定運轉的功能。本章利用了回饋模擬法進行 模擬,以分析實際運轉時的狀況,再藉由修正程序進行風量修正。同 時針對部份機台停止運轉的情況,選用最佳的風機變頻策略以達到節 能的效果。因此,結合動態規劃法和回饋模擬法所設計之製程排氣系 統,較其他設計方法更有成本最佳化與節能運轉策略的競爭優勢,能 提供一全方位最佳化的製程排氣系統設計的方法。
六、 計畫成果自評
本研究所提出創新設計方法,可將廣泛應用於製程排氣系統,除 了可應用於系統的設計階段之外,亦可針對既有之製程排氣系統提供 最佳化的運轉策略,為一種可以同時滿足設備最佳化設計與實際節能 運轉的全方位解決方法,達到生命週期成本最小與省時省力之全方位 解決工具。綜合動態規劃法最佳化分析與回饋模擬法節能運轉策略, 將可用以評估製程排氣系統之節能效益,進而作為未來製程排氣系統 最佳化節能設計之參考。參考文獻
[1] Carrier, W. H., Cherne, R. E. and Grant, W. A., 1940, Modern Air Conditioning, Heating and Ventilating, New York/Chicago, Pitman Publishing Corporation. [2] Shieh, C. L., 1983, “Simplified Static-Regain Duct Design Procedure”, ASHRAE
Transactions, Vol. 89, Part 2A, pp. 78-94.
[3] Tsal, R. J. and Behls, H. F., “Fallacy of the Static Regain Duct Design Method”, ASHRAE Transactions, Vol. 94, Part 2, pp.76-89.
[4] Tsal, R. J., Behls, H. F. and Mangel, R., 1988, “T-Method Duct Design Part I: Optimization Theory”, ASHRAE Transactions, Vol. 94, Part 2, pp.90-111.
[5] Tsal, R. J., Behls, H. F. and Mangel, R., 1988, “T-Method Duct Design Part II: Calculation Procedure and Economic Analysis”, ASHRAE Transactions, Vol. 94, Part 2, pp.112-150.
[6] Tsal, R. J., Behls, H. F. and Mangel, R., 1990, “T-Method Duct Design Part III: Simulation”, ASHRAE Transactions, Vol. 96, Part 2, pp.3-31.
[7] Tsal, R. J., Behls, H. F. and Varvak L. P., 1998, “T-Method Duct Design Part IV: Duct Leakage Theory”, ASHRAE Transactions, Vol. 104, Part 2, pp.85-97.
[8] Tsal, R. J., Behls, H. F. and Varvak L. P., 1998, “T-Method Duct Design Part V: Duct Leakage Calculation Technique and Economics”, ASHRAE Transactions, Vol. 104, Part 2, pp.98-113.
[9] Asiedu, Y., Besant, P.E. Robert W. and Gu, P., 2000, “HVAC duct system design using genetic algorithms”, HVAC&R Research, Vol. 6, No. 2, pp. 149-173.
[10] Chen, H. J., Shiu, H. R. and Chen, S. L., 2003, “Process Exhaust Duct System Design Using Dynamics Programming Method”, Journal of the Chinese
Institute of Engineers, Vol. 26, No. 2, pp. 155-164,
灣大學機械工程學研究所,民國九十一年一月.
[12] Chen, W. L., Chen, H. J., Ting, C. C. and Chen, S. L., 2002, “Application of 3C Duct Design Method in Semiconductor Factory Process Exhaust Systems”,
表1 酸性氣體製程排氣系統輸入條件 管段編號 風量 (m3/sec) 管段長度 (m) 管段編號 風量 (m3/sec) 管段長度 (m) 1 10.62 1.0 29 1.72 21.4 2 8.28 38.0 30 3.05 1.0 3 0.37 3.8 31 3.05 13.4 4 0.37 3.0 32 1.72 21.4 5 0.37 1.5 33 1.33 1.0 6 0.37 9.6 34 1.33 6.0 7 0.37 12.6 35 0.72 18.0 8 7.91 0.5 36 0.61 1.0 9 7.91 2.5 37 0.61 14.4 10 7.91 4.5 38 0.61 22.4 11 7.91 10.5 39 2.34 1.0 12 7.91 14.7 40 2.34 3.2 13 7.91 4.0 41 2.34 2.0 14 2.11 0.5 42 0.82 2.0 15 2.11 6.4 43 1.52 15.0 16 2.11 20.4 44 1.17 3.0 17 1.06 23.0 45 0.70 1.0 18 1.05 2.0 46 0.70 7.0 19 1.05 47.6 47 0.70 12.0 20 1.05 20.2 48 0.47 12.0 21 5.80 0.5 49 0.33 17.5 22 5.80 57.0 50 0.33 8.6 23 5.80 6.0 51 0.33 10.4 24 0.53 22.0 52 0.82 21.5 25 5.27 16.0 53 0.82 15.0 26 0.50 22.0 54 0.82 24.0 27 4.77 1.0 55 0.56 5.0 28 4.77 5.4 56 0.26 10.2
表 2 酸性氣體製程排氣系統各路徑說明 號徑 編號 模擬路徑方向 1 Fan←1←2←3←4←5←6←7 2 Fan←1←2←8←9←10←11←12←13←14←15←16←17 3 Fan←1←2←8←9←10←11←12←13←14←15←16←18←19←20 4 Fan←1←2←8←9←10←11←12←13←21←22←23←24 5 Fan←1←2←8←9←10←11←12←13←21←22←23←25←26 6 Fan←1←2←8←9←10←11←12←13←21←22←23←25←27←28←29 7 Fan←1←2←8←9←10←11←12←13←21←22←23←25←27←28←30←31←32 8 Fan←1←2←8←9←10←11←12←13←21←22←23←25←27←28←30←31←33←34←35 9 Fan←1←2←8←9←10←11←12←13←21←22←23←25←27←28←30←31←33←34←36←3 7←38 10 Fan←1←39←40←41←43←44←45←46←47 11 Fan←1←39←40←41←43←44←48 12 Fan←1←39←40←41←43←49←50←51 13 Fan←1←39←40←41←42←52←53←54←55 14 Fan←1←39←40←41←42←52←53←54←56 表 3 動態規劃法計算陣列 1 i P Di j1− 1 i j V− Es i j1,− +Es jmin, =E1s i, 2 i P Di j2− 2 i j V− Es i j2,− +Es jmin, =Es i2, -- -- -- -- -- -- -- -- k i P Di jk− k i j V− Es i jk,− +Es jmin, =Es ik,
表 4 酸性氣體製程排氣系統動態規劃法設計結果 管段編號 水力直徑 (m) 風速 (m/s) 管段編號 水力直徑 (m) 風速 (m/s) 1 1.5 6.23 29 0.4 12.66 2 0.8 15.21 30 0.6 10.06 3 0.2 12.38 31 0.6 10.06 4 0.2 12.38 32 0.4 12.20 5 0.2 12.38 33 0.5 7.37 6 0.2 12.38 34 0.5 7.37 7 0.2 12.38 35 0.3 10.43 8 1.0 9.17 36 0.3 7.44 9 1.0 9.17 37 0.3 7.44 10 1.0 9.17 38 0.3 7.44 11 1.0 9.17 39 0.6 8.24 12 1.0 9.17 40 0.6 8.24 13 1.0 9.17 41 0.6 8.24 14 0.5 10.52 42 0.3 10.81 15 0.5 10.52 43 0.4 14.36 16 0.5 10.52 44 0.3 14.00 17 0.3 15.47 45 0.2 15.08 18 0.4 10.02 46 0.2 15.08 19 0.4 10.02 47 0.2 15.08 20 0.4 10.02 48 0.2 17.08 21 0.9 9.88 49 0.2 10.66 22 0.9 9.88 50 0.2 10.66 23 0.9 9.88 51 0.2 10.66 24 0.2 12.36 52 0.3 10.81 25 0.8 10.89 53 0.3 10.81 26 0.2 11.26 54 0.3 10.81 27 0.8 9.68 55 0.3 8.59 28 0.8 9.68 56 0.2 7.48
表 5 酸性氣體製程排氣系統各設計方法成本比較 設計方法 初始成本 (Es×105元) 運轉能源成本 (Ep×105元) 生命週期成本 (E×106元) 等摩擦法 6.36 13.96 11.97 靜壓再得法 8.10 11.54 9.90 T 方法 7.79 9.40 8.07 動態規劃法 6.21 6.97 5.90 註:本表所列之成本估算是以十年為計算年限 表6 回饋模擬法(第一次模擬)各機台需求、模擬風量與誤差值 機台編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.37 0.38 2.70 2 1.06 1.11 4.72 3 1.05 1.13 7.62 4 0.53 0.54 1.89 5 0.50 0.51 2.00 6 1.72 1.92 11.63 7 1.72 1.97 14.53 8 0.72 0.80 11.11 9 0.61 0.65 6.56 10 0.70 0.75 6.29 11 0.47 0.52 10.64 12 0.33 0.38 15.15 13 0.56 0.73 30.36 14 0.26 0.30 15.38 Total 10.62 11.69 10.07
表 7 回饋模擬法(第一次模擬)各管段之風速模擬值 管段編號 風速(m/s) 管段編號 風速(m/s) 管段編號 風速(m/s) 1 6.62 20 9.28 39 9.10 2 16.03 21 10.84 40 9.10 3 12.06 22 10.84 41 9.10 4 12.06 23 10.84 42 12.41 5 12.06 24 12.18 43 15.56 6 12.06 25 12.08 44 15.12 7 12.06 26 11.22 45 16.06 8 9.69 27 10.86 46 16.06 9 9.69 28 10.86 47 16.06 10 9.69 29 15.32 48 18.81 11 9.69 30 11.30 49 12.35 12 9.69 31 11.30 50 12.35 13 9.69 32 13.97 51 7.41 14 9.92 33 8.05 52 12.41 15 9.92 34 8.05 53 12.41 16 9.92 35 11.55 54 12.41 17 14.85 36 7.93 55 11.16 18 9.28 37 7.93 56 6.24 19 9.28 38 7.93
表 8 回饋模擬法(第二次模擬)之各機台需求、模擬風量與誤差值 機台編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.37 0.38 2.70 2 1.06 1.12 5.66 3 1.05 1.11 5.71 4 0.53 0.54 1.87 5 0.50 0.52 4.0 6 1.72 1.84 6.97 7 1.72 1.84 6.97 8 0.72 0.74 2.77 9 0.61 0.65 6.56 10 0.70 0.72 3.39 11 0.47 0.48 2.13 12 0.33 0.35 6.06 13 0.56 0.58 2.68 14 0.26 0.27 3.84 Total 10.62 11.14 4.89 表 9 回饋模擬法(第三次模擬)之各機台需求、模擬風量與誤差值 機台編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.37 0.38 2.70 2 1.06 1.11 4.72 3 1.05 1.10 4.76 4 0.53 0.54 1.89 5 0.50 0.52 4.0 6 1.72 1.80 4.65 7 1.72 1.79 4.07 8 0.72 0.74 2.77 9 0.61 0.64 4.92 10 0.70 0.72 2.86 11 0.47 0.48 2.13 12 0.33 0.34 3.03 13 0.56 0.58 3.57 14 0.26 0.27 3.84 Total 10.62 11.01 3.67
表10 回饋模擬法部份機台運轉模擬結果 (1/2 機台-風機全速-第一次模擬) 路徑編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.37 0.49 32.43 2 0.00 0.00 0.00 3 0.00 0.00 0.00 4 0.00 0.00 0.00 5 0.00 0.00 0.00 6 1.72 3.88 125.58 7 0.00 0.00 0.00 8 0.00 0.00 0.00 9 0.00 0.00 0.00 10 0.70 0.89 27.14 11 0.47 0.62 31.91 12 0.33 0.46 39.39 13 0.56 0.87 55.36 14 0.26 0.27 3.84 Total 4.41 7.48 69.61
表11 回饋模擬法部份機台運轉模擬結果 (1/2 機台-風機全速-第二次模擬) 路徑編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.37 0.38 2.70 2 0.00 0.00 0.00 3 0.00 0.00 0.00 4 0.00 0.00 0.00 5 0.00 0.00 0.00 6 1.72 1.80 4.65 7 0.00 0.00 0.00 8 0.00 0.00 0.00 9 0.00 0.00 0.00 10 0.70 0.73 4.28 11 0.47 0.49 4.26 12 0.33 0.33 0 13 0.56 0.57 1.78 14 0.26 0.27 3.85 Total 4.41 4.57 3.63
表12 回饋模擬法部份機台運轉模擬結果 (1/3 機台-風機全速-第一次模擬) 路徑編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.00 0.00 0.00 2 0.00 0.00 0.00 3 0.00 0.00 0.00 4 0.00 0.00 0.00 5 0.00 0.00 0.00 6 1.72 4.05 135.46 7 0.00 0.00 0.00 8 0.00 0.00 0.00 9 0.00 0.00 0.00 10 0.00 0.00 0.00 11 0.00 0.00 0.00 12 0.33 0.56 69.70 13 0.56 0.93 66.07 14 0.26 0.28 7.69 Total 2.87 5.82 102.78
表13 回饋模擬法部份機台運轉模擬結果 (1/3 機台-風機全速-第二次模擬) 路徑編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.00 0.00 0.00 2 0.00 0.00 0.00 3 0.00 0.00 0.00 4 0.00 0.00 0.00 5 0.00 0.00 0.00 6 1.72 1.80 4.65 7 0.00 0.00 0.00 8 0.00 0.00 0.00 9 0.00 0.00 0.00 10 0.00 0.00 0.00 11 0.00 0.00 0.00 12 0.33 0.34 3.03 13 0.56 0.58 3.57 14 0.26 0.27 3.85 Total 2.87 2.99 4.18
表14 回饋模擬法部份機台運轉模擬結果 (1/2 機台-風機 65%轉速) 機台編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.37 0.38 2.70 2 0.00 0.00 0.00 3 0.00 0.00 0.00 4 0.00 0.00 0.00 5 0.00 0.00 0.00 6 1.72 1.75 1.75 7 0.00 0.00 0.00 8 0.00 0.00 0.00 9 0.00 0.00 0.00 10 0.70 0.73 4.28 11 0.47 0.49 4.26 12 0.33 0.34 3.03 13 0.56 0.57 1.78 14 0.26 0.26 0 Total 4.41 4.52 2.72
表15 回饋模擬法部份機台運轉模擬結果 (1/3 機台-風機 65%轉速) 路徑編號 需求風量(cms) 模擬風量(cms) 誤差(%) 1 0.00 0.00 0.00 2 0.00 0.00 0.00 3 0.00 0.00 0.00 4 0.00 0.00 0.00 5 0.00 0.00 0.00 6 1.72 1.73 0.58 7 0.00 0.00 0.00 8 0.00 0.00 0.00 9 0.00 0.00 0.00 10 0.00 0.00 0.00 11 0.00 0.00 0.00 12 0.33 0.34 3.03 13 0.56 0.58 3.57 14 0.26 0.27 3.85 Total 2.87 2.92 1.74
圖1 酸性氣體製程排氣系統配置圖
模擬時間 逐時移動 Step 1 初始參數輸入 工作流體性質 導管幾何性質 風管阻力係數 擋板流量係數 Step 2 模擬模型建立 如圖3-1所示 Step 3 限制條件輸入 速度限制 幾何限制 Step 4 系統模擬理論 系統收縮 操作點選擇 系統展開 Step 6 修正程序 壓力平衡 No Yes Step 7 機台負荷的變動 輸出結果 Step 5 Error detector 模擬值與需求值誤 差小於5%大於0% Yes No 圖3 製程排氣系統回饋模擬法模擬流程圖
Fan
1
2
1-2
圖4(a) 兩管段串聯系統Fan
1
2
1-2
圖4(b) 兩管段並聯系統Fan
1
2
3
1-3
2-3
圖4(c) 三管段 T 形連接Total Pressu re Loss (Pa) Path Number 圖5 不同風管設計方法下各路徑全壓降比較[11] 100% Fan Speed 65% Fan Speed Pressure (Pa) Q(m3/s) 圖 6 不同轉速下之風機性能曲線
Power(kW)
1/2 terminals closed 2/3 terminals closed Terminal Load