國 立 交 通 大 學
電子工程學系 電子研究所碩士班
碩 士 論 文
IEEE802.16e OFDMA 上行及下行通道估測技術
之設計
Design of Channel Estimation Techniques for
IEEE802.16e OFDMA Uplink and Downlink
研 究 生:曾思衡
指導教授:陳紹基 博士
IEEE 802.16e OFDMA 上行及下行通道估測技術之設計
Design of Channel Estimation Techniques for IEEE802.16e OFDMA
Uplink and Downlink
研 究 生:曾思衡 Student:Szu-Heng Tseng
指導教授:陳紹基 博士 Advisor:Sau-Gee Chen
國 立 交 通 大 學
電子工程學系 電子研究所碩士班
碩 士 論 文
A ThesisSubmitted to Department of Electronics Engineering & Institute of Electronics College of Electrical and Computer Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Electronics Engineering July 2007
Hsinchu, Taiwan, Republic of China
IEEE802.16e OFDMA 上行及下行通道估
測技術之設計
學生: 曾思衡
指導教授: 陳紹基 博士
國立交通大學
電子工程學系 電子研究所碩士班
摘 要
802.16e 的通道估測最主要的挑戰就是,如何用有限的前導訊號
來估測出時變通道。在本篇論文中,所提出的通道估測方法基於適當
的數學模型假設。此數學模型可以有效減少所需估計的未知數並且解
決前導訊號不足的問題。因此,提出的方法可以估測出時變的通道,
更被設計為準確且可以實作的。
Design of Channel Estimation Techniques for
IEEE802.16e OFDMA Uplink and Downlink
Student: Szu-Heng Tseng
Advisor: Sau-Gee Chen
Department of Electronics Engineering & Institute of Electronics
National Chiao Tung University
Abstract
The main challenge of channel estimation in an IEEE 802.16e system is how to estimate time-variant channel by using limited pilot tones. In this thesis, the proposed channel estimation method is based on appropriate mathematical models. We can overcome the lack of pilot tones and reduce unknown parameters by using these mathematical models. Therefore, the channel estimation in time-variant channel is feasible, and it is designed to be accurate and practical.
誌 謝
首先要感謝我的指導教授 陳紹基博士。當我遇到研究上的疑惑與困 難時,能適時的給予指導以及提供思考方向,並且不厭其煩的在學問上給 予正確的觀念講解,使我能順利的完成本篇論文,在此致上由衷的感謝。 在碩士生涯的兩年多,我也要感謝實驗室的宅宅們:宜融老大、臭屁 徽和飛群叔叔,謝謝你們陪我一起宅,帶給我許多愉快的回憶與歡笑;感 謝致良和我一起合作討論,讓我學習到不少;感謝健全學長在計畫和生活 上面的指導,使我獲益良多;外特別感謝已經畢業的金融學長犧牲了寶貴 休假的時間解答我的問題並且給我建議和鼓勵。 最後感謝我的父母與家人,從小以來對我的呵護與栽培,讓我能順利 完成學業,並且擁有寶貴的人生經歷,在此獻上無限的感激與敬意。目錄
中文摘要 i Abstract ii 誌謝 iii 目錄 iv 表目錄 vii 圖目錄 viii 第一章 緒論 1 1.1 研究背景及動機 1 1.2 論文架構 4 第二章 正交分頻多工系統的基本原理 5 2.1 正交分頻多工(OFDM)系統模型 6 2.1.1 循環字首(CP)之觀念介紹 6 2.1.2 離散時間 OFDM 模型 7 2.2 無線通訊環境中的通道特性 9 2.3 次載波間干擾(ICI)的分析 10第三章 IEEE 802.16e OFDMA 規格簡介 14
3.1 802.16e OFDMA 中的符元架構 15 3.1.1 OFDMA 基本術語 15 3.1.2 頻域上的描述 16 3.1.3 主要參數的定義 16 3.1.4 推導出的參數 16 3.1.5 訊框架構 17
3.2.2 前導訊號的架構和調變 19
3.2.3 子載波的配置 20
3.2.4 嚮導訊號的調變 23
3.2.5 資料的調變 23
3.3 802.16e OFDMA 上行(uplink) 的傳送規格 24
3.3.1 資料配置規則 24
3.3.2 子載波的配置 25
3.3.3 嚮導訊號的調變 26
3.3.4 資料的調變 27
第四章 IEEE 802.16e OFDMA 的通道估測 28
4.1 非時變通道估測 29 4.1.1 頻域上的通道估測 30 4.1.1.1 最小平方通道估測法 30 4.1.1.2 DFT-based 內插法 31 4.1.2 時域上的通道估測 33 4.1.2.1 時域之基本通道估測法 34 4.1.2.2 時域之最小平方估測子 35 4.1.3 二維通道估測 38 4.1.3.1 降低雜訊 38 4.1.3.2 通道追蹤 39 4.1.3.3 滑動式窗口之線性與二次方程式通道 估測 41 4.2 時變通道估測 42 4.2.1 在一個 OFDM 符元中的時變通道估測法 44 4.2.1.1 Stamoulis 的通道估測法 45 4.2.1.2 Yeh 對於 Stamoulis 通道估測法的改進 49
4.2.1.3 Mostofi 利用 CP 的通道估測 49 4.2.2 利用鄰近 OFDM 符元的時變通道估測法 50 4.2.2.1 Yeh 的通道估測法 50 4.2.2.2 Mostofi 利用相鄰符元之通道估測 53 Chapter 5 提出的通道估測方法 56 5.1 提出的非時變通道估測方法 56 5.1.1 滑動式窗口之線性與二次 B-spline 56 5.1.2 非時變通道估測的計算量分析 59 5.2 提出的時變通道估測方法 60 5.2.1 對於 Yeh 的通道估測法之改進 60 5.2.2 對於 Mostofi 的通道估測法之改進 63 5.2.3 提出之時變通道估測流程 64 5.2.4 理論上的效能分析 66
5.3 提出之 IEEE 802.16e OFDMA 通道估測方法 68
5.3.1 802.16e 下行通道估測設計 69 5.3.2 802.16e 上行通道估測設計 71 Chapter 6 模擬結果 74 6.1 提出的非時變通道估測法之模擬結果 77 6.2 提出的時變通道估測法之模擬結果 80 6.3 提出的 802.16e 下行通道估測之模擬結果 86 6.4 提出的 802.16e 上行通道估測之模擬結果 88 Chapter 7 結論 90 參考文獻
92 簡歷 96
表目錄
表 3-1 OFDMA 下行之 PUSC 模式下的子載波放置 22 表 3-2 OFDMA 下行之子通道群的編制方式 22 表 3-3 OFDMA 上行之子載波放置範例 26 表 5-1 非時變通道估測之計算量比較 60 表 6-1 SUI-1 通道 75 表 6-2 SUI-2 通道 75 表 6-3 SUI-3 通道 75 表 6-4 ITU-R 運動測試環境通道 A 76 表 6-5 ITU-R 運動測試環境通道 B 76 表 6-6 OFDM 系統模擬參數 77圖目錄
圖 2-1 OFDM 符元中的循環字首 6
圖 2-2 離散時間 OFDM 模型 7
圖 2-3 不同 f 下的正規大小響應 nd 12
圖 2-4 OFDM 系統在時變通道的 SIR 相對於 f 之變化 nd 13
圖 3-1 OFDMA 的 data region 範例 15
圖 3-2 OFDMA 頻域上子載波的分配 16 圖 3-3 OFDM 在 TDD 模式下單一 segment 的訊框架構 17 圖 3-4 OFDMA 下行 PUSC 的資料配置範例 19 圖 3-5 OFDMA 下行的 cluster 之組態 20 圖 3-6 OFMA 系統用來調變嚮導訊號的 PRBS 產生器 23 圖 3-7 QPSK、16QAM 和 64QAM 星座圖 24 圖 3-8 OFDMA 上行之資料配置規則範例 25 圖 3-9 OFDMA 上行之 tile 示意圖 26 圖 4-1 非時變通道估測法之分類 30 圖 4-2 時間平均的嚮導訊號之示意圖 40 圖 4-3 sliding-window LAQ 的流程 42 圖 4-4 OFDM 通道估測分類圖 43 圖 4-5 fnd =0.1時某子載波的 ICI 對距離為∆ 的鄰近子載波之影響 47 圖 4-6 等距的嚮導訊號群 49 圖 4-7 Yeh 的通道估測法 52 圖 4-8 Mostofi 的通道估測法 54 圖 5-1 LAB 通道估測 58 圖 5-2 Quadratic B-spline 內插的脈衝響應 58
圖 5-4 提出之方法一(proposed method 1) 62 圖 5-5 提出之方法二(proposed method 2) 63 圖 5-6 利用相鄰符元之通道估測的效能分析 67 圖 5-7 802.16e 上行的時間平均嚮導訊號產生之方法 69 圖 5-8 802.16e 下行通道估測流程圖 70 圖 5-9 802.16e 上行通道估測流程圖 73 圖 6-1 非時變通道估測之效能比較。
(a)max delay 16T . (b)max delay 32s T . (b)max delay 64s T s 78
圖 6-2 提出的方法在 fnd =0.05之效能。(a)MSE.(b)BER. 80 圖 6-3 提出的方法在 fnd =0.1之效能。(a)MSE.(b)BER. 81 圖 6-4 提出的方法在 fnd =0.05時,消除鄰近不同數量之子載波所造成的 ICI 之效能比較。(a)MSE.(b)BER. 83 圖 6-5 提出的方法在 fnd =0.1時,消除鄰近不同數量之子載波所造成的 ICI 之效能比較。(a)MSE.(b)BER. 84 圖 6-6 提出的 802.16e 下行通道估測法在不同車速下之比較。(a)MSE.(b)BER. 86 圖 6-7 提出的 802.16e 上行通道估測法在不同車速下之比較。(a)MSE.(b)BER. 88
第一章
緒論
隨著無線通訊技術的進步,人們對於多媒體服務的需求也相對增加,使得正 交分頻多工 (OFDM) 技術靠著其高速率傳輸的能力以及對抗多重路徑效應的能 力成為無線通訊中重要的技術之一。目前制定的 WiMAX 便是以 OFDM 技術為調變 技術,採用 IEEE802.16、802.16a…802.16d 和 802.16e 標準作為基礎。 802.16e 和之前的標準之不同處在於其提供了高速移動的服務持續性,期望 在時速 120km/hr 的車速下仍然能夠使用,另外規格中還提供了省電性;而其利 用的 OFDMA (orthogonal frequency division multiple access) 架構規格可 以在同一個時間內分頻支援多用戶來使用,是目前熱門的無線通訊規格之一。1.1 研究背景及動機
正交分頻多工 (OFDM) 系統在非時變的情況下,只要循環字首(cyclic prefix,CP)的長度大於最大通道延遲的長度,就可以把每個子通道(subchannel) 的頻率響應視為平坦響應(flat fading)。在這種狀況之下,對於通道估測
(channel estimation,CE)而言,可以利用穿插在資料中的嚮導訊號(pilots) 來內插出整個通道頻率響應;之後的資料偵測(data detection)可以使用 one-tap 等化器(equalizer)來消除通道的效應,使得整個系統的硬體架構變的 簡單且容易實現,如 IEEE 802.11n。 然而在 IEEE802.16e 的規格中支援了高速移動的行動傳輸。無可避免的,此 系統將遭受到在一個符元內的時變通道效應,而時變的通道將會破壞 OFDM 系統 子載波(subcarriers)之間的正交性而造成載波間的相互干擾(intercarrier interference),簡稱為 ICI。在此狀況之下對於通道估測而言,在時域上因為 是要估測時變的通道,所以未知數變多了;頻域上來看,時變通道所造成的 ICI 在頻域上面表現出來,所以除了估測出每個子載波上的頻率響應之外,還必須估 測出對於其他子載波造成的 ICI 影響,則未知數更加龐大。 對於緊接而來的訊號偵測來說,ICI 消除是必需的,相對的也會增加硬體的 複雜度。在頻域上做 zero-forcing 為最直觀的訊號偵測以及 ICI 消除方法,但 是會有雜訊增強(noise enhancement)和複雜度過高的問題;Yeh et al.[1]提出 遞迴式的決策回授(decision feedback)ICI 消除法,避免雜訊增強的問題且複 雜度也較低;Choi et al.[2]提出類似 V-BLAST 的訊號偵測方式,反而利用了通 道時變特性來獲得訊雜比(SNR)的增益,為目前最好的訊號偵測方法,但是複雜 度是 zero-forcing 的好幾倍;Jeon et al.[3]將通道矩陣切成許多小區塊,只 消除主要的 ICI 項,如此將原本 zero-forcing 的複雜度降低很多;而 Tsai et al. [4] 結合了 Choi 和 Jeon 的方法,獲得了高 SNR 和低複雜度,同時也指出通道估 測錯誤對於訊號偵測錯誤率(BER)的影響,並且說明必須要有準確的通道估測才 能真正利用通道時變特性去獲得高 SNR 的增益來降低錯誤率 (BER)。其中,準確 的通道估測代表通道的時變方式或者 ICI 的估測是必需的。 如前面所述,時變的通道因為未知數增加造成了通道估測的難度,如何在有 限的嚮導訊號(pilot tones)下完成準確的通道估測將會在支援行動傳輸的無線 通訊系統中扮演舉足輕重的腳色。在時變的通道估測方面,Yeh et al. [1]使用
無線通道在兩個符元內為線性變化之假設,利用每個通道路徑在時間上的平均值 來做兩個符元(symbol)之間的通道路徑追蹤,並且利用估測出的通道在頻域上進 行決策回授 ICI 消除;Y.Mostofi et al.[25]則使用類似的方法,但是多考慮了 下一個符元的影響,此兩種方法都是設計在時域通道上的估測。基本上,在時域 上通道估測主要的優點在於未知數比起在頻域上的通道估測少。但是必須多加入 通道路徑選擇機制,而能量比較低的通道路徑可能由於雜訊的影響解析不出來, 所以往往需要已知通道路徑延遲(channel path delay),才會在高雜訊和高 ICI 下有較好的效能。再者,如 802.16e 規格中,因為有相當長的保護區間(guard band) 以及使用 OFDMA 的分頻技術,所以接收端只能估測出一小段連續的通道頻率響 應,以這些資訊想要求出時域上的通道路徑是困難的。
在頻域上的通道估測沒有上述的缺點,所以適合採用作為 802.16e 的通道估 測方法,但是估測的未知數也相對的變多了。此外,對 802.16e 而言,每個符元 上的嚮導訊號又太過稀少,因此要利用稀少的嚮導訊號估測出多個未知數 (包含 ICI 項) 成為 802.16e 通道估測的挑戰。Lin [6]針對 802.16e 下行 (downlink) 的規格,利用現有符元 (current symbol) 的前一個和後一個符元的嚮導訊號平 均值作為現有符元的嚮導訊號,使得一個符元之中的嚮導訊號提升為兩倍,進而 提高通道估測準確度;Zheng et al. [7] 使用 kalman filter 來更新現有符元 的通道頻率響應。基本上,802.16e 現有的頻域之通道估測法大多類似,即參考 其它符元的頻率響應來調整現有符元的頻率響應,但這只能處理在一個符元內為 非時變的通道估測。對於時變的通道估測,Zhou et al.[24]設計出針對 802.16e 下行規格之通道估測方法,但是由於只在通道頻域上使用一階泰勒展開式,所以 無法支援高車速下的傳輸。
基本上無論是頻域上或者時域上的時變通道估測法,大多建立在假設通道變 化為線性的條件下,因為如此可以降低未知數的數量使得方程式有解,所以主要 的關鍵在於準確度和複雜度之間的取捨(trade off)。本篇論文的動機在於發展
法。
1.2 論文架構
本篇論文的架構如下,第二章描述 OFDM 系統的基本原理以及多重路徑雷立 衰弱 (multipath Rayleigh fading) 無線通道特性,之後討論 OFDM 系統在時變 通道下的次載波間干擾 (ICI) 的效應。第三章簡介 IEEE 802.16e OFDMA 的規 格,主要介紹和通道估測有關的符元中的基本架構,以及上行 (UL) 和下行 (DL) 的傳送規格。 第四章介紹通道估測的基本原理,並沒有特別指定要哪一種規格下的無線通 訊系統,大致區分為非時變通道估測和時變通估測。第四章的目的主要是介紹現 有的通道估測方法,以及其演進的關係,並且加以統整分類。第五章針對 802.16e OFDMA 上行和下行的規格需要設計出適當的通道估測方法。第六章為吾人提出的 通道估測方法之效能比較。第七章是結論以及未來的發展方向。
第二章
正交分頻多工的基本原理
OFDM (Orthogonal Frequency Division Multiplexing) 即正交分頻多工技 術,是一種無線環境下的高速傳輸技術。無線通道的頻率響應因為有多重路徑干 擾 (multipath effect),大多是非平坦的。而 OFDM 技術的主要思想就是在頻域 內將通道分成許多正交子通道,在每個子通道 (subchannel) 上使用 1 個子載波 (subcarrier) 進行調變,並且各個子載波並行傳輸。這樣,儘管整個通道之頻 率響應是非平坦的,具有頻率選擇性 (frequency selective fading) ,但是每 個子通道是相對平坦的 (flat fading)。在 OFDM 系統中各個子通道的載波相互 正交,於是它們的頻譜被設計成互相重疊的,因此不但減少了載波間的相互干 擾,同時又提高了頻譜效率 (spectral efficiency)。
2.1 正交分頻多工系統模型
2.1.1 循環字首(CP)之觀念介紹
CP (cyclic prefix) 是一個符元中最尾端的一段資料的複製,並且加在該 符元的最前端,如圖 2-1 所示。其主要的功能為對抗符元間干擾 (intersymbol interference ,ISI) 以及次載波間干擾 (intercarrier interference ,ICI)。
當訊號在無線環境中傳輸時,因為通道的多重路徑 (multipath) 影響,使 得接收到的訊號是原本訊號乘上通道增益之後,在時域上的位移疊加,在通道為 非時變的狀況下,此現象稱為訊號和通道的折積 (convolution)。此時如果符元 和符元之間沒有足夠的空間存在,則接收到的訊號也將含有上一個符元的資訊, 稱為符元間干擾 (ISI)。解決此問題最直觀的想法就是在符元和符元之間空出一 段時間不傳任何資料,作為保護區間 (guard interval ,GI),而且此區間的長 度必須大於最大通道路徑延遲 (maximum channel path delay)。
但是對於 OFDM 調變而言,因為其訊號是用正交載波來調變的,在通道的多 路徑效應下,接收端收到的符元卻會因為保護區間而在這個符元中失去訊號的正 交性,產生次載波間干擾 (ICI,在此指因為 GI 而造成的 ICI,而非由 Doppler 效應所造成的 ICI)。ISI 和 ICI 兩個問題都可以藉由引入 CP 來解決,CP 的長度 和 GI 一樣,也必須要大於最大通道路徑延遲,才可以抵抗多重路徑的問題。 加入 CP 雖然有優點,但是也使得系統要付出傳送功率以及頻寬的代價,若 選擇較短的 CP 長度,則多重路徑的效應可能會造成影響;選擇較長的 CP,又會 Cyclic prefix 圖 2-1 OFDM 符元中的 CP
造成傳送功率和頻寬不必要的浪費,此即為在設計 OFDM 系統的一項取捨 (trade-off)。在 802.16e 規格中就定義了多種 CP 長度,分別為整個符元長度 的 1 32、 1 16、 1 8和 1 4。此外,將在下節的離散時間 OFDM 模型中,以另一個角度 來解釋 CP 的好處。
2.1.2 離散時間 OFDM 模型
1971 年,Weinstein 提出可以將 OFDM 系統的傳送端的調變器 (modulator) 和接收端的解調器 (demodulator) 分別使用 IDFT 和 DFT 來實現 [10]。並且隨 著 fast DFT (FFT) 和 fast IDFT (IFFT) 演算法的發展,使其可以應用在 OFDM 系統上,如圖 2-2 所示。
M
M
M
M
( )
w n
( , )
h n l
(0)
iX
(1)
iX
(
1)
iX N
−
(0)
ix
(1)
ix
(
1)
ix N
−
(0)
iy
(1)
iy
(
1)
iy N
−
(0)
iY
(1)
iY
(
1)
iY N
−
P/S
S/P
I
D
F
T
D
F
T
AWGN
i cpx
y
icp 圖 2-2 離散時間 OFDM 模型 首先,將頻域的訊號使用 IDFT 調變到時域,其中i 表示目前符元為第 i 個 符元,為了方便起見,以下討論將省略 i 參數。則時域的訊號可表為 2 1 0 ( ) ( ) j kn N N k x n − X k e π = =∑
(2-1) 其中X k 表示被第 k 個子載波 (subcarrier) 調變的訊號,且( ) 0≤ ≤ −n N 1。之channel) 傳送至接收端,此時接收到的訊號可表為 1 0 ( ) L ( , ) ( )N ( ) l y n − h n l x n l w n = =
∑
− + (2-2) 其中h n l 代表通道路徑( , ) l在取樣時間n的響應。本篇論文假設通道路徑延遲均 恰好落在取樣點上,才可表成 (2-2),對於未能落在取樣點上的通道延遲的情況 可參考 [14],此不在本論文的討論範圍中;( ) 表示一個以 N 為基數的循環位N 移 (cyclic shift) 運算子,這是由於加了之後 CP 所產生的效果;w n 為一( ) 個被取樣過後的複數可加性高斯白雜訊 (AWGN)。 接收到的訊號y n 在將 CP ( ) y 移除之後,便可經由串行至並行轉換器 cp(serial to parallel converter,S/P) 然後經過 DFT 解調,解調後在第 k 個 子載波的訊號如下所示 2 1 0 ( ) ( ) j kn N N n Y k − y n e− π = =
∑
(2-3) 以上即為 OFDM 離散模型之基本架構,值得注意的是,當(2-2)的通道為非時 變時,可以將接收訊號簡化成 1 0 ( ) L ( ) ( )N ( ) l y n − h l x n l w n = =∑
− + (2-4) 此時由於 CP 的作用使得接收訊號成為通道和傳送訊號的環狀折積 (circular convolution) 再加上雜訊,如(2-4)所示。由離散訊號處理的觀念得知[21],兩 個訊號在時域的環狀折積經過 DFT 後,等效於兩訊號在頻域的相乘。於是(2-3) 可表為 2 1 0 ( ) ( ) ( ) ( ) ( ) j kn N N n Y k − y n e− π H k X k W k = =∑
= + (2-5) 其中 2 2 1 1 0 0 ( ) ( ) ( ) j kn j kn N L N N n n H k h n e h n e π π − − − − = = =∑
=∑
(2-6) 為通道的頻率響應 2 1 0 ( ) ( ) j kn N N n W k − w n e− π = =∑
(2-7)為雜訊的頻率響應。明顯地,可以從(2-5)看出當通道為非時變時,靠著 CP 和 IDFT/DFT 運算使得在頻域的接收訊號僅為傳送訊號和通道響應相乘,此為 OFDM 系統可以對抗多重路徑通道的原因。關於通道為時變的情況,將在 2.3 節的 ICI 分析中描述。
2.2 無線通訊環境中的通道特性
各類訊號從發送端送出之後,在到達接收端之前所經過的所有路徑,我們 統稱為通道。在無線散射的環境下,通道行為可用多重路徑延遲模型 (multipath delay profile) 來表示,通道響應是時間(t )和多重路徑延遲(τ)的函數,表示 如下 1 0 ( , ) L l( ) ( l) l h t τ − α δ τ τt = =
∑
− (2-8) 其中αl( )t 為一個複數且時變的路徑增益 (path gain),τ 為這些路徑相對應的l 延遲時間 (path delay),共有L 條路徑。參考 [11] 和 [12] 中的αl( )t 定義如 下 , , (2 cos ) , 1 ( ) d n l n l M j f t l n l n t C e π γ φ α + = =∑
(2-9) 其中M 表示不可解析的路徑 (unresolvable path) 數目,由這些路徑來組成一個可解析的 (resolvable) 通道路徑l;C 為隨機路徑增益 (random path n,l
gain);γn,l為接收端和入射波的夾角 (angle of the incoming wave);φn,l為初 始 相 位 (initial phase) ; f 代 表 最 大 Doppler 頻 率 (maximum Doppler d frequency),定義如下 c d f v f C (2-10)
(2-10)定義為最大 Doppler 頻率的意義為,當移動端與入射波夾角γn,l為00
或180 時,因為此時兩端的相對速度最大,所以將產生最大的 Doppler 效應。另0
外從(2-9)和(2-10)也可以發現,若存在行動速度(mobile speed,v),則 fd ≠ ,0
此時通道為時變。而時變的大小與載波頻率(carrier frequencies, f )、行動c
速度(v)和 OFDM 符元週期(symbol duration)的大小成正比。
對於(2-9)隨機程序的模擬,已有許多機率估計模型 (simulation models) 被提出以符合 Jake's model [12]的機率特性,此非本論文的研究重點。在第五 章的模擬中,通道模擬方法參考自 [13],為一個在高階統計特性上仍然符合 Jake's model 的模型,並且只要給予路徑延遲能量 (power delay profile)和 延遲時間 (path delay),就可以輕易擴充至多重路徑模型,如(2-8)。
2.3 次載波間干擾 ( ICI) 分析
OFDM 系統中,當時變的通道破壞了載波間的正交性,使得在頻域上的子載 波 (subcarrier) 受到其他子載波的干擾之現象,稱為 Doppler 效應引起之次載 波間干擾(Doppler-induced intercarrier interference),簡稱 ICI。分析如 下,將(2-1)和(2-2)帶入(2-3)中,可得 1 0, ( ) ( , ) ( ) N ( , ) ( ) ( ) m m k ICI Y k k k X k − k m X m W k = ≠ =G +
∑
G + 144424443 (2-11) 其中, 2 ( ) 2 1 1 0 0 1 ( , ) ( , ) j r m k j lm N L N N r l k m h r l e e N π − − π − − = =∑∑
G (2-12) 比較(2-5)和(2-11)可發現,當通道為時變的情況下Y k 將受到 ICI 項( ) 1 0, ( , ) ( ) N m m k G k m X m − =∑
≠ 的干擾。而非干擾的部分如下所示 2 2 1 1 1 1 0 0 1 0 1 1 ( , ) ( , ) ( ( , )) j lm j lm N L L N N N r l l r k k h r l e h r l e N N π π − − − − − − = = = = =∑∑
∑ ∑
G (2-13)為第k個子載波上的通道響應。此時定義通道路徑l在一個符元內的時間平均值 如下 1 0 1 ( ) N ( , ) ave n h l h n l N − = =
∑
(2-14) 則(2-13)可改寫為 2 1 0 ( , ) ( ) j lk L N ave l k k h l e π − − = =∑
G (2-15) 此外,為了方便分析可以將(2-11)改寫成矩陣形式 1 H N = + Y QHQ X W (2-16) 其中Y [ (0), , (Y Y N−1)]T L 、X [ (0), , (X X N −1)]T L 、W [ (0), , (W W N−1)]T L , ( , )n m h n n m( ,( − ) )NH 為 circular toeplitz matrix。Q( , )n m e−j2πmn N代表
DFT 矩陣。定義 1 H N G QHQ ,則(2-16)可簡化為 = + Y GX W (2-17) 我們可發現,在通道為非時變 (time-invariant) 的狀況下,矩陣H 可被矩 陣Q 對角化,此時 OFDM 系統抵抗了多重路徑干擾,如(2-5);但是在通道為時變 (time-variant) 的狀況下,矩陣G將存在非對角線項,此時對於接收訊號產生 ICI。由 2.2 節可知,決定通道是否為時變的參數在於通訊的兩端是否有相對速 度產生,(2-10)中隱含著相對速度越大則通道變化越快,理論上也將產生更嚴重 的 ICI,並且當觀測時間t 越長則通道總變化量越大。為了方便比較,定義正規
化 Doppler 頻率 (normalized Doppler frequency) f 如下 nd
nd d ob
f f T (2-18)
其中T 為觀察時間 (observation duration),本篇論文中將觀察時間定為一個ob
OFDM 符元的時間,如(2-19),其中T 定義為一個 OFDM 符元的時間(OFDM symbol s
time)。 f 越大時,OFDM 系統將承受更大的 ICI。 nd
nd d s
要了解一個子載波中的訊號產生的 ICI 影響其他子載波之程度,定義 [ 0, 1, , N -1]N N× G g g K g ,其中g 為i G矩陣中第i+1個行向量 (column), 0,1,..., 1 i= N− ,則(2-18)可改寫如下 (0) (1) ( 1) X X X N = o + 1 + + N-1 − + Y g g K g W (2-20) (2-20)表示資料X i 藉由( ) g 將其能量散到其他的子載波,而影響其上所傳送的i 資料,而g 的大小分佈和i f 的關係如圖 2-3 所示。橫軸代表 i jnd − ,其中 j 為g 裡i 面的 row index, j=0,1,...,N− 。 1 -40 -30 -20 -10 0 10 20 30 40 10-3 10-2 10-1 100 Subcarrier Index Nor m al iz ed M ag ni tu de fnd = 0.1 fnd = 0.083 fnd = 0.04 圖 2-3 不同 f 下的正規大小響應 [3] nd
另外從(2-12)可以定義 SIR (signal to interference ratio)如下
2 1 2 1 0 0, ( , ) ( ) ( , ) ( ) N N k m m k k k X k SIR k m X m − − = = ≠
∑
∑
G G (2-21) ,意即訊號和干擾的比值,SIR 與 f 之關係圖如 2-4 所示。 nd0 0.02 0.04 0.06 0.08 0.1 0.12 15 20 25 30 35 40 SI R (dB) nd f 圖 2-4 OFDM 系統在時變通道的 SIR 相對於 f 之變化[4] nd
第三章
IEEE 802.16e OFDMA 規格簡介
802.16e 專注在行動運用上,以非直視路徑 (Non Line of Sight;NLOS) 特 性為基礎,制定出相容 802.16d 的行動傳輸規格。可以自由選擇 TDD 或 FDD 等雙 工方式,並採用 OFDM、OFDMA 方式傳輸,且支援 128、512、1024、2048 個子載 波調變方式。中心頻率在 2GHz~6GHz 之間,每個通道佔用 1.5MHz~20MHz 之頻寬, 傳輸距離在 1~2km 左右。 本章介紹 802.16e OFDMA 架構之定義,並且選擇與通道估測技術相關的規 格來說明,詳細的資料可參考 [8] 和 [9]。
3.1 802.16e OFDMA 中的符元架構
3.1.1 OFDMA 基本術語 (OFDMA Basic Terms)
本節介紹 OFDMA PHY 中的一些基本定義,幫助我們了解 802.16e OFDMA 中 子載波的分配和傳送配置的情況。
z Slot:為一個二維的單位,由時間和子通道 (subchannel) 所組成,並且定 義為資料 (data) 可以被配置的最小單位。在下行 (downlink) PUSC 的排 列方式下,一個 slot 為一個子通道加上兩個 OFDMA 符元時間;在上行 (uplink)的情況,一個 slot 為一個子通道加上三個 OFDMA 符元時間。 z Data Region:為一個由連續的子通道和連續的 OFDMA 符元所組成的二維放
置單位,如圖 3-1 所示。
圖 3-1 OFDMA 的 data region 範例 [8]
z Segment:為天線蜂巢架構中所分出的扇形涵蓋區域,在 802.16e 中定義三 個 segment,分別為 segment 0、segment 1 和 segment 2。由頻域上定義 可使用的子通道群組 (subchannel group),做為切割方式。
3.1.2 頻域上的描述 (Frequency Domain Description)
OFDMA 的一個符元是由頻域上的子載波 (subcarriers) 所組成,載波可大 概分為三類,如圖 3-2 所示,並說明如下:
z Data subcarriers:用來傳送資料。
z Pilot subcarrier:傳送已知的訊號,可利用來做一些估測。
z Null subcarriers:不傳送任何訊號,分為頻域上的保護區間 (guard bands) 和直流子載波 (DC subcarrier)。 圖 3-2 OFDMA 頻域上子載波的分配 [8]
3.1.3 主要參數(Primitive Parameters)的定義
定義系統基本參數如下: z BW:通道頻寬,隨不同的 FFT 點數而變。 z Nused:有被使用的子載波數目 (包含 DC subcarrier)。 z n:取樣參數 (sampling factor),其大小由頻寬(BW)來決定,詳細情況 可參考 [9]。z G:為 CP time 和 useful time 之比值,可支援1/ 32,1/16,1/ 8 和1/ 4的大小。
由 3.1.4 節的定義,可推導出以下的系統參數:
z NFFT :使用的 FFT 點數,為 2 的冪次並且大於Nused之最小值。
z Sampling frequency:Fs = floor n BW( ⋅ / 8000) 8000× z Subcarrier spacing:∆ =f F Ns/ FFT
z Useful symbol time:Tb = ∆ 1/ f z CP time:Tg = × G Tb
z OFDMA symbol time:Ts = + Tb Tg z Sampling time:T Nb/ FFT
3.1.5 訊框架構 (Frame Structure)
802.16e OFDMA 每個 frame 為多用戶正交分頻多工系統符元架構 (OFDMA symbol structure),如圖 3-3 所示。
802.16e 中 DL 和 UL 之間的傳送模式可分為 TDD 和 FDD 兩種。TDD 表示 DL 與 UL 是在時域上做為區隔的,如圖 3-3 所示,一個 frame 的前半段時間為 DL 傳收的區間,之後的 TTG 為讓基地台 (BS) 從傳送模式轉到接收模式的時間,然 後再來是 UL 傳收的區間,之後的 RTG 為讓基地台 (BS) 從接收模式轉到傳送模 式的時間;而 FDD 模式表示 DL 與 UL 是在頻率上做區隔。 802.16e 在縱軸的頻譜上區分為三個 segment,即在蜂巢架構上區分為三個 部分,避免此三個頻段互相干擾,圖 3-3 就是單一個 segment 的訊框架構,並且 為 TDD 模式。其中 Preamble 包含一些已知資訊可做為同步所用,而 FCH、DL-MAP 和 ULMAP 則定義個用戶資料區的開頭和區段等等資訊。DL burst 和 UL burst 分別為上行和下行的用戶資料區,此兩個區塊分別由一個或一個以上的 cluster 和 tile 建構而成。其中,Cluster 和 tile 的組態分別在 3.2 節和 3.3 節中定義。
3.2 802.16e OFDMA 下行 (downlink) 的傳送規格
下行為基地台傳送到手機端接收的行為,本節將對 802.16e OFDMA PUSC downlink 傳送規格做一個簡介。
3.2.1 資料配置規則 (data mapping rules)
Downlink PUSC 模式的資料配置規則如圖 3-4 所示。說明如下:
z 將資料分割且轉成區塊的形式來符合一個 OFDMA slot 的形式,如 3.1.1 節 說明的形式 (1_subchannel by 2_OFDMA_symbol)。
z 由編號較小的 subchannel 開始配置 slot。
z 當到達 Data region 的邊緣時,跳到下一個 symbol 最小編號的 subchannel 開始配置 slot,直到 data region 的最底端為止。
圖 3-4 OFDMA 下行 PUSC 的資料配置範例 [9]
3.2.2 前導訊號的架構和調變 (preamble structure and
modulation)
如圖 3-3 所示,DL 訊框的第一個符元為前導訊號 (preamble),主要用來做 同步 (synchronization) 和 基地台搜尋 (cell search)。其擺放的形式依照不 同的 segment 分成三種形式,定義如下:
PreambleCarrierSetn = + n 3 k (3-1)
其中, 0,1, 2
n= :分別代表 segment 0、segment 1 和 segment 2。
0, ,567
k= K :代表每個 segment 各佔了 568 個交錯的子載波。
所以圖 3-3 的 preamble 部分僅有1
3為該 segment 的 preamble,其他 2
3為另外兩
個 segment 所有,這是 preamble 與其他資料不同之處。至於 preamble 的內容則
為一組特定的 pseudo-noise(PN) code,以 BPSK 調變並且增強(boost)2 2倍,
如(3-2)所示: 1 {Pr } 4 2 ( ) 2 k eamblePilotModulated w ℜ = − {PreamblePilotModulated} 0 ℑ = (3-2) 其中w 為 PN code。另外要注意的是,DC subcarrier 必須為k 0,所以剛好落在 DC subcarrier 上的 preamble 值都必須設定為0。
3.2.3 子載波的配置 (subcarrier allocations)
OFDMA downlink PUSC 裡面子載波的配置除了放 zero subcarriers 的 guard band 之外,資料 (包含 pilot subcarriers 和 data subcarriers) 以 cluster 為單位擺放,如圖 3-5 所示。
圖 3-5 OFDMA 下行的 cluster 的組態
一個 cluster 中有 14 個子載波,內有 2 個嚮導訊號 (pilot subcarriers) 和 12 個 data subcarriers,其擺放方式根據現有的符元是偶數符元 (even symbol) 或者奇數符元 (odd symbol) 而定,接在 preamble 之後的第一個符文定義為偶
數符元,其後為奇數符元,依此類推。
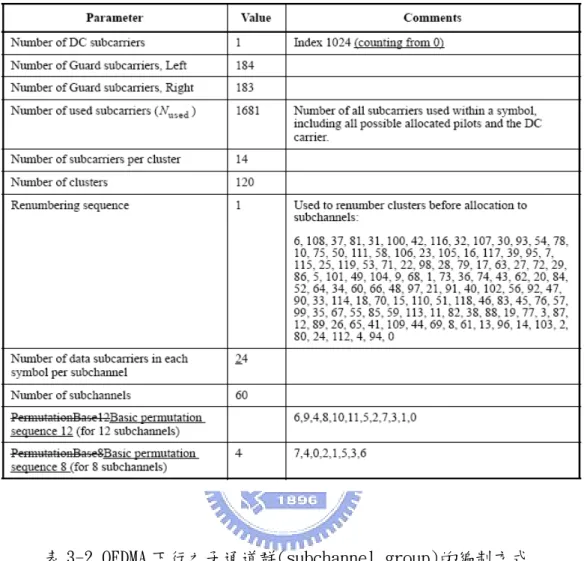
802.16e 共支援 128、512、1024 和 2048 點的 FFT 點數,在 DL PUSC 的模式 中,不管是哪種點數都是以 cluster 為單位擺放,使得硬體的設計上會較有一致 性。而在 DL FUSC 模式,雖然在相同 FFT 點數下支援較多的 data subcarriers, 但是 pilot subcarriers 也相對減少許多,再加上不同點數的情形下擺放資料的 方式也不盡相同,使得通道估測在硬體設計上較無一致性,少量的 pilot subcarriers 也使得通道估測的準確度受到挑戰,使得 FUSC 模式主要在良好的 傳輸環境下使用。本論文著重在高車速下的通道估測設計,所以選擇 DL PUSC 為通道估測設計的主題之一。 表 3-1 為 2048 點 DL PUSC 的資料放置情形,裡面共有 120 個 clusters,60 個 subchannels (1 個 subchannel=2 個 clusters)。
至於其中不同 segment 之間的分割方式可參考表 3-2,首先將 PUSC 內的子 通道分成子通道群(subchannel group),之後分給不同的 segment 來使用。其中 segment 0 內至少要有 subchannel group 0,segment 1 內至少要有 subchannel group 2,segment 2 內至少要有 subchannel group 4。
表 3-1 OFDMA 下行之 PUSC 模式下的子載波放置
3.2.4 嚮導訊號的調變 (pilot modulation)
類似於 preamble 的調變方式,嚮導訊號以一個虛擬隨機二位元序列產生器 (pseudo-random binary sequence generator:PRBS generator)來產生,如圖
3-6 所示。內容為 BPSK 並且有 2.5dB(4 3倍)的增強,表示如下: 8 1 { } ( ) 3 2 k k c w ℜ = − { } 0ck ℑ = (3-3) 圖 3-6 OFMA 系統用來調變嚮導訊號的 PRBS 產生器
3.2.5 資料的調變 (data modulation)
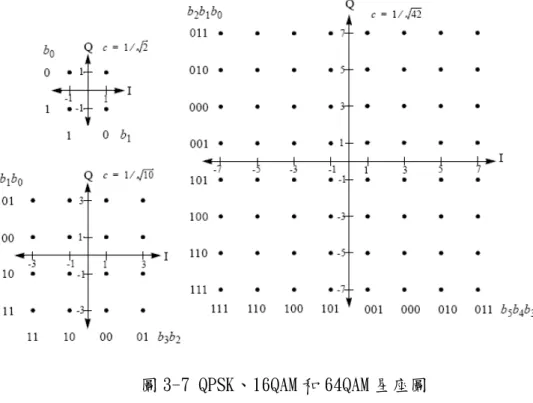
如圖 3-7,資料的調變方式有 QPSK、16QAMQ 和 64QAM,皆為格雷編碼方式 (Gary-mapped),其中 64QAM 為選擇性的(optional)。圖 3-7 QPSK、16QAM 和 64QAM 星座圖
3.3 802.16e OFDMA 上行(uplink)的傳送規格
下行為手機端傳送到基地台接收的行為,本節將對 802.16e OFDMA PUSC uplink 傳送規格做一個簡介。
3.3.1 資料配置規則 (data mapping rules)
Uplink 資料配置和 downlink 類似,都是以 slot 為最小單位開始擺放,到 達 data region 的邊界為止。主要不同之處有二,第一個是 slot 的維度變成了 1 個 subchannel 乘以 3 個 symbols;其次為整個 data region 的結構不必像 DL 一樣必須為長方形的結構,如圖 3-8 所示。
圖 3-8 OFDMA 上行之資料配置規則範例
3.3.2 子載波的配置 (subcarrier allocations)
在 UL 中以 tile 來當做配置的單位,如圖 3-9 所示。Tile 由連續 4 個子載
波和連續 3 個 OFDMA 符元時間所組成,其中含有 4 個 pilot subcarriers 和 8 個 data subcarriers。詳細的配置以 2048 點為範例,如表 3-3 所示。在 UL 中 1 個 burst 為 3 個符元時間和 1 個子通道 (subchannel)構成,而 6 個 tile 在頻域 上組成一個子通道,因此每個 burst 有 48 個 data subcarriers 和 24 個固定點 的 pilot subcarriers。
嚴格來說,即便是同一個 segment 中的用戶和基地台之間經歷的通道也會不 同,所以在 UL 中的 brusts 應該視為個體分別估測出其經歷的通道響應,不可全 部視為同一種通道下的響應來處理。對於 DL 而言,因為用戶端所接收的訊號都 來自於同一個通道影響,故沒有上述的問題存在,但是為了硬體設計上的一致性
位。另外,在 UL 的通道估測設計將以一個 burst (slot)為單位。
圖 3-9 OFDMA 上行之 tile 示意圖
表 3-3 OFDMA 上行之子載波放置範例
3.3.3 嚮導訊號之調變 (pilot modulation)
嚮導訊號的產生方法如同在 DL 的方法,不同之處有二。第一個是 PRBS 的初 始序列 (initialization sequences) 不同;其次是 pilot 的大小沒有增強 (boost)的效果,如(3-4)所示:
1 { } 2( ) 2 k k c w ℜ = − { } 0ck ℑ = (3-4)
3.3.4 資料的調變 (data modulation)
如圖 3-7 所示,資料的調變方式有 QPSK、16QAMQ 和 64QAM,皆為格雷編碼 方式(Gary-mapped),其中 64QAM 為選擇性的(optional)。第四章
現有嚮導訊號輔助通道估測技術之介紹
當我們在空氣中傳送電磁訊號時,這些訊號會因為環境中的物體,如建築 物、樹、車輛甚至空氣中的灰塵微粒等等,而產生反射、繞射和散射等情形。這 些隨機事件和雜訊使得接收到的訊號和傳送的訊號明顯地不同,因此我們需要無 線通道的資訊才能還原出原始的傳送訊號,而得到通道資訊的方式或手段稱為通 道估測 (channel estimation)。 OFDM 的通道估測技術大致上可分為兩類,第一種稱為嚮導訊號輔助 (pilot symbol aided estimation;PSAE),是利用被傳送的已知訊號做為估測的基礎, 如 802.11n [15][16] 和 802.16e 均為此類,也是本論文討論的重點;另外一種 稱為盲式估測 (blind estimation;BE),是以訊號的結構特性做為估測的基礎, 本論文中不討論此架構。在 PSAE 中,若以 802.16e 為例,已知訊號又以是否可傳送資料(data)分類 為前導訊號 (preamble) 和嚮導訊號 (pilot)。一個符元中若傳送的訊號皆為已 知的,則這些訊號稱為前導訊號:反之,若只有一部分的訊號為已知,則這些訊 號稱為嚮導訊號。由於 preamble 在接收端將帶有較多的通道資訊,所以可以獲 得較 pilot 準確的通道估測結果,但是也僅限於該符元中的通道。在非時變的通 道下(如 802.11n),我們僅僅需要在 preamble 符元中設計出準確的通道估測方
法即可給後面的 data 符元使用;但是當通道為時變(如 802.16e)時,preamble 就起不了太大的作用,此時就必須依靠 pilot 來做通道估測,至於 preamble 則 可能用來做通道的初步估測或者完全不予使用。 OFDM 的通道估測若以估測出的通道類型來區分,可分為時域上的通道估測 和頻域上的通道估測。此外,在非時變的通道中,時域和頻域通道的轉換方式如 (2-6)所示: 2 2 1 1 0 0 ( ) ( ) ( ) j kn j kn N L N N n n H k − h n e− π − h n e− π = = =
∑
=∑
而在時變的通道中,時域和頻域通道的轉換方式如(2-12)所示: 2 ( ) 2 1 1 0 0 1 ( , ) ( , ) j r m k j lm N L N N r l k m h r l e e N π − − π − − = =∑∑
G 此外,本章將分別討論非時變(time invariant)通道估測和時變(time varying)通道估測之現有的方法,並且加以統整分類。最後在第五章會基於 802.16e OFDMA 系統實作上的考量設計出合適的通道估測架構。4.1 非時變通道估測(CE for time-invariant
channel)
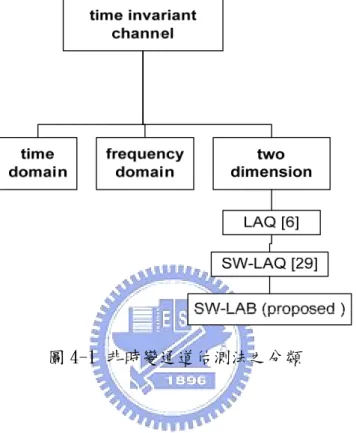
本節中介紹 OFDM 系統中對於非時變通道估測的估測子(estimator)。若通道 在一個符元時間內為非時變的,則稱此通道為半穩態(quasi-static),此為 OFDM 系統中對於非時變通道之定義的極限。只要通道比半穩態通道變化小,對於通道 估測的設計來說都是相當容易的;反之,時變通道將存在 ICI,使得通道估測的 設計相對複雜。 本篇論文討論的通道估測基於 PASE,其中已知訊號(pilot)擺放在頻域上, 為較常見的 OFDM 系統擺放方法。對於在時域加上已知訊號的通道估測法可參考 [5]的 super-imposed training sequence,此不在本論文的討論範圍中。OFDM 通道估測主要有兩個常見的估測子(estimator),分別為 LS 和 MMSE 估 測子。然而 MMSE 估測子需要已知通道機率特性,所以其價值主要在於理論分析 上,因此本節只討論 LS 估測子。以下則將非時變通道估測法分為時域、頻域和 混合時域和頻域的二維(2 dimension)通道估測法,如圖 4-1 所示。
圖 4-1 非時變通道估測法之分類
4.1.1 頻域上的通道估測 (frequency domain approach)
顧名思義,目的為估測出(2-18)中的矩陣G。對於非時變的狀況下,矩陣G 將退化為對角矩陣,此時的討論就在於如何使用 pilot 準確內插出整個頻域上的 通道響應。 4.1.1.1 最小平方(least-square)通道估測法 最小平方(LS)估測法在 OFDM 系統中被廣泛使用,並且也常常用來做為其它 通道估測方法的基礎。假設通道在該符元中為非時變 (time-invariant),則在 頻域上的接收訊號可表為(2-5),其中H k( )=G k k( , )為矩陣G之對角線元素。由 (2-5)
2 1 0 ( ) ( ) ( , ) ( ) ( ) j kn N N n Y k − y n e− π k k X k W k = =
∑
=G + (4-1) 則估測G( , )k k 之方法可以直觀地看出。假設 M 個 pilot 的位置放置在p k 上,( ) 則有 ( ( )) ( , ) ( ) ( ( )) 0,1, 2, , 1 Y p k =G k k P k +N p k k = L M − (4-2) 則通道對第k個子載波的頻率響應可被粗略估測如下 ˆ ( ( ), ( )) ( ( )) ( ( ), ( )) ( ( )) ( ) ( ) Y p k N p k G p k p k G p k p k P k P k = = + (4-3) 至於其他未放置 pilot 的子載波則可以使用內插法來估測其頻率響應,例如常見 的線性內插、二階多項式內插、cubic 內插和 spline 內插,更多進階的內插法 可參考[4][14]。本論文將於下一節介紹其中一種 DFT-based 內插法。 4.1.1.2 DFT-based 內插法 DFT-based 內插法在[17][18]中被提出,此方法必須建立在等間距(equal spaced)的 pilot 下,才能夠利用快速傅立葉轉換演算法來降低計算複雜度。 首先,在 pilot 上的 M 點通道響應可以由最小平方(LS)估測子算出,如 (4-3)。之後對於這 M 個通道頻率響應做 M 點的 IDFT,如下所示: 2 1 0 1 ˆ ( ) M ˆ( ( ), ( )) j nk, 0,1, 2, , 1 M p k h n G p k p k e n M M π − − = =∑
= L − (4-4) 我們可以將這 M 個等間距的通道頻率響應視為整個通道在頻域上的取樣 (down sample),如此(4-4)中的 ˆh n 將會是真正的通道在時域上的多個複製位移相加p( ) 的結果(overlapped version),在不發生膺頻(aliasing)效應的前提之下(在這 個例子就是: NM ≥ maximum path delay sample),我們可以將時域上的響應取
出然後經過 DFT 到頻域上完成整個頻域上通道的內插,如(4-5)和(4-6)。 ˆ ( ), 0 1 ˆ( ) 0, 1 1 p h n n M h n M n N ⎧ ≤ ≤ − ⎪ = ⎨ − ≤ ≤ − ⎪⎩ (4-5)
2 1 0 ˆ ˆ ( , ) ( ) 0,1, 2, , 1 nk N j N n G k k − h n e− π k N = =
∑
= L − (4-6) 嚴格來說,此方法可視為頻域和時域通道的混合估測法,但它主要是處理頻域上 的內插問題,所以吾人將此方法歸類在頻域的通道估測之中。 DFT-based 內插法因為有轉換到未知數較少的時域上作估測,所以在較長的 delay spread 下(frequency-selective fading 較嚴重時),會比直接在頻域上 作內插的方法更為精準。其主要的問題有二: z 雜訊放大 將(4-3)帶入(4-4)如下: 2 1 0 2 1 0 1 ( ( )) ˆ ( ) [ ( ( ), ( )) ] ( ) 1 [ ( ( ), ( ))] +w(n) 0,1, 2, , 1 nk M j M p k nk M j M k N p k h n G p k p k e M P k G p k p k e M n M π π − − = − − = = + = = −∑
∑
L (4-7) 假設雜訊 ( ( )) ( ) N p k P k 之能量為 1,則w(n) 之能量為 1 M 。對於直接在頻域上作內插 的方法來說,假設未擺放 pilot 的 tone 內插後一樣受到能量為 1 之雜訊N k 影( ) 響,此時轉換到時域上如下: 2 1 0 2 1 0 1 ˆ( ) [ ( , ) ( )] 1 [ ( , )] +w'(n) 0,1, 2, , 1 nk N j N k nk N j N k h n G k k N k e N G k k e N n N π π − − = − − = = + = = −∑
∑
L (4-8) 則w'(n) 之能量為 1 N ,所以(4-4)將把雜訊的能量放大 N M 倍。此結果導致(4-5) 上出現一些由於雜訊造成的假通道路徑,若是誤判了這些通道路徑將造成通道估 測的準確度降低。反過來說,若能設計出準確的通道路徑選擇架構,就會有降低 雜訊的效果,通道路徑選擇的設計也是使用 DFT-based 內插法在實作上要多付出 的代價。z 非等距嚮導訊號(nonequal-spaced pilot) 和保護區間(guard effect)的問 題
DFT-based 內插法的好處在於可以直接利用快速傅立葉演算法來實現,存在 equal-spaced pilot 下,(4-4)才成立。 在沒有等距嚮導訊號的情況下,我們可以在頻域上使用內插法製造出一組間 接的等距嚮導訊號,然後套用 DFT-based 內插法。因為間接得來的等距嚮導訊號 較不準確,所以效能的降低是可以預期的,而多花計算在內插出間接的 pilot tone 上面也是缺點之一。 另外 IEEE 802.11 和 802.16 系列的規格中都存在保護區間,尤其是 802.16e 中在 FFT 點數大時有相當長的保護區間,造成通道在頻域上有一大段的資訊無法 被獲得,此情況下也無法順利執行(4-4)。對於此情況,Cheng et al.[14]提出 了兩個解決方法,第一個方法是對於這些未知通道響應的保護區間作外插,可想 而知,在保護區間過長或者頻率選擇性衰弱(frequency-selective fading)較高 時,這些間接得來得嚮導訊號準確度相當差;第二個方法為修正(4-4)中的 IFFT 形式,使其可以不受限於 equal-spaced pilot 的前提。由於時域上通道的資訊 只有L 個,若不考慮雜訊的問題,理論上取頻域之任意 M 點( M > )都可以解L 出時域上的通道,所以此方法準確度相當高。然而,修正過後的(4-4)就無法使 用快速傅立葉演算法來達成,所以也就不能稱作 DFT-based 內插法。對於修正過 後的 IDFT 如何設計成為硬體上可實作的架構(如 partial IFFT/FFT),本篇論文 將此當作 future work。Cheng et al.[14]之方法二稱為 partial DFT matrix inversion,因為其牽涉到頻域和時域的轉換關係,故吾人放在 4.1.2 節的時域 通道估測深入討論之。對於存在保護區間或者非等距嚮導訊號的 OFDM 系統中, 吾人認為不適合再利用 DFT-based 內插法來作通道估測。
4.1.2 時域上的通道估測 (time domain approach)
共有L 條通道路徑在N個時間點上的值,所以未知數共有N L× 個。而頻域上對 於(2-17)的G矩陣的通道估測,未知數則有N N× 個,且N >>L,所以在時域 上的通道估測最主要的好處就是未知數的數目比在頻域上的通道估測少很多;而 當通道為非時變時,時域估測的未知數變成了L 個,而頻域上的G矩陣也將退化 為對角矩陣,變成只有N個未知數。 4.1.2.1 時域之基本通道估測法 假設通道為非時變 (time-invariant),參考(2-4): 1 0 ( ) L ( ) ( )N ( ) l y n − h l x n l w n = =
∑
− + 其中0≤ ≤ −n N 1,如果在時域上的訊號x n 為已知,則(2-4)可進一步改寫如下: ( ) = + y Xh w (4-9) 其中 [ (0), , (y y N−1)]T y L 、 [ (0), , (h h L−1)]T h L 、 [ (0), , (w w N−1)]T w L 且 (0) ( 1) ( 1) (1) (0) ( 2) ( 1) ( 2) ( ) N L x x N x N L x x x N L x N x N x N L × − − + ⎡ ⎤ ⎢ − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − − − ⎥ ⎣ ⎦ X L L M M O M L 如此便可藉由收到的y 來求得 h ,如下所示: ( ) ∧ = + = + = + + h X y X Xh + w h X w (4-10) 其中X 為矩陣 X 的虛擬反矩陣(pseudo inverse):+ X = (X X) X + H -1 H 基本上此方法的優點在於未知數較頻域的通道估測少,所以若在相同的資訊 量下,此方法的準確度較高。缺點主要可分三方面: z 第一,(4-10)的運算量是非常大的,尤其是在像 802.16e 規格中大量 FFT 點數下操作。 z 第二,(4-10)顯示此方法有雜訊增強(noise enhancement)的效果,一旦出 現了能量較小的通道路徑將會大大的影響估測結果。z 第三,通道的最大延遲 L 必須為已知才可決定矩陣 X 之大小。 此外,此方法只適用在以 preamble 為基礎的非時變通道估測,因為只有在 傳送 preamble 的時候,擺放在頻域上的 pilot 才能在時域上被完全已知,對於 用於資料傳送(data transmission)的時域通道估測技術將在 4.1.2.2 節介紹。 4.1.2.2 時域之最小平方(LS)估測子 同 4.1.1.1 節介紹之 LS 估測子,在時域上也有等效的 LS 版本。因為本論文 討論的 OFDM 之嚮導訊號皆放在頻域上,所以處理時域上的 LS 估測法可以分成兩 個步驟。第一步為 4.1.1.1 中介紹的 LS 估測法,解出 pilot 位置上的通道響應; 第二步再將這些解出來的響應轉回時域的通道路徑,此兩步驟的結合就可稱為時 域版本的 LS 估測子。 我們可以發現 DFT-based 內插法中的(4-4)為第二個步驟在等距的嚮導訊號 下之情形,在此吾人不再使用等距的嚮導訊號來說明時域的 LS 估測子,順便探 討 Cheng et al.[14]的 partial DFT matrix inversion 如何解決保護區間的問 題(guard band effect)。首先,我們寫出非時變通道的時域和頻域之間的轉換 式(2-6): 2 2 1 1 0 0 ( ) ( ) ( ) j kn j kn N L N N n n H k h n e h n e π π − − − − = = =
∑
=∑
改寫如下: 0,0 0,1 0, 1 1,0 1,1 1, 1 1,0 1,1 1, 1 1 1 _ (0) (0) (1) ( 1) (2) 0 0 ( 1) N N N N N N N N N N N N N N N N N FFT Matrix N N h H W W W H W W W h L H W W W H N − − − − − − × × × ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ − ⎥ ⎣ ⎦ ⎣ ⎦ L L M M O M M M O M M M L L 14444444244444443 (4-11) 其中 2 , j kn k n N N W =e− π ,假設嚮導訊號隨機落在p p0, ,1 K,pM−1的位置上,在 M>L 之情況下必可解出時域的通道路徑,此時要將(4-11)的 FFT Matrix 修正如下: 0 0 0 1 1 1 1 1 1 0 ,0 ,1 , 1 1 ,0 ,1 , 1 2 ,0 ,1 , 1 1 1 1 ( ) (0) ( ) ( ) ( 1) 0 ( ) 0 M M M p p p N N N N p p p N N N N p p p N N N N M N M M N L zeros N H p h W W W H p W W W H p h L W W W H p − − − − − − × − × − × ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ L L M M O M M M O M M M L L 14243 (4-12) 注意在此我們並未限制 pilot 擺放的位置,所以適用於存在保護區間或者存 在非等距的嚮導訊號之情況。(4-12)中因為已知方程式不夠,所以無法解出時域 的通道路徑,修改如下: 0 0 0 1 1 1 1 1 1 0 ,0 ,1 , 1 1 ,0 ,1 , 1 2 ,0 ,1 , 1 1 1 1 ( ) (0) ( ) ( ) ( 1) 0 ( ) 0 M M M p p p M N N N p p p M N N N p p p M N N N M M M M M L zeros M H p h W W W H p W W W H p h L W W W H p − − − − − − × − × − × ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ L L M M O M M M O M M M L L 14243 (4-13) → Wh = H 因為 M>L,所以(4-13)可以成立。所以通道路徑就可以直接以反矩陣求得如 下: -1 h = W H (4-14) 此即為 Cheng et al.[14]的 partial DFT matrix inversion。雖然可以有效解 決 Guard Effect 和 non-equal spaced pilot 問題,但其有兩個主要的缺點: z 計算複雜度高 (4-14)的計算複雜度為O M ,由於變成了 partial DFT matrix,所以不( 2) 能套用快速傅立業轉換演算法來降低複雜度。 z 反矩陣不存在的問題 Cheng[14]認為(4-14)W中的 pilot 間隔必須要小心選取,否則將造成W不 存在反矩陣。但是吾人認為(2-6)中頻域通道H k 的 N 個值是由時域通道 h(l) 的( )
L 個值轉換得來,所以我們在頻域上任取 M>L 個值必可以轉換回時域上的 L 個通 道路徑。而模擬上也未出現此類問題。 將頻域上的 LS 估算子結合(4-14)我們可以得到時域的 LS 估算子,如下所示: 0 0 0 1 1 1 1 1 1 1 ,0 ,1 , 1 0 ,0 ,1 , 1 1 ,0 ,1 , 1 1 1 1 0 0 (0) ( ) 1 0 ( 1) ( ) 0 0 1 0 0 0 ( ) M M M p p p M N N N p p p M N N N p p p M N N N M M M M L zeros M h X p W W W W W W h L X p W W W X p − − − − − − − × − − × ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢⎣ ⎦ L L L M M M O M M O M O M M L L L 14243 0 1 2 1 1 ( ) ( ) ( ) ( M )M M M Y p Y p Y p Y p− × × ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎥ M M (4-15) $ → -1 p p p h = W X Y = QY (4-16) 其中,Y為訊號經過 FFT 之後在 pilot 位置上的值;p X 為一個對角矩陣,其對角p 元素為 pilot 的倒數(在此我們假設 pilot 皆為實數,LS 估算子才有此結果);Q
則為 partial DFT matrix inversion 和X 的合成效果: p
-1 p Q = W X (4-17) 時域上的 LS 因為不用處理頻域上內插的問題,所以沒有內插法所造成的誤 差,理論上要比頻域上的 LS 和內插法精準。代價就是(4-16)的計算複雜度很高, 吾人認為若能巧妙的設計W和X 的結構,使得矩陣p Q有辦法利用類似快速傅立業 轉換的想法來達成,應可解決此問題。 另外,若考慮 pilot 數目小於通道路徑的情況(M<L),則頻域上的內插法仍 可以進行通道估測,此時(4-15)卻無法解出通道路徑。此情形通常發生在 OFDMA uplink 時,每個用戶對於基地台之間的通道都不相同,並且每個用戶傳送的 pilot 數量有限的情況下。
4.1.3 二維通道估測(two dimensional approach)
二維通道估測指的是綜合頻域和時域的通道估測,在此時域的通道估測定義 和 4.1.2 不同,是利用相鄰符元之間的關係,使得現有符元頻域上的通道估測更 準確。其中又可細分成兩個目的來討論,第一個目的是做雜訊消除(noise reduction) , 第 二 個 目 的 是 在 半 穩 態 的 通 道 變 化 下 做 通 道 追 蹤 (channel tracking),詳述在以下兩節中。 4.1.3.1 降低雜訊 舉例來說,在非時變通道的系統中(如 802.11n),我們往往只需要在前導訊 號(preamble)估測出準確的通道就可以用來解出整個訊框(frame)中的資料。此 時若在其他的符元上再繼續處理通道估測,目的即是為了做雜訊消除,說明如下: 由(4-3)可得到 pilot 位置上的頻域通道響應如下: 1 1 ˆ ( ( ), ( )) ( ( ), ( )) ( ( )) ˆ ( ( ), ( )) ( ( ), ( )) ( ( )) I I I I G p k p k G p k p k N p k G + p k p k G p k p k N + p k = + = + (4-18) 其中 ˆG p k p k 表示第I( ( ), ( )) I 個符元上第 ( )p k 個子載波所受到的通道影響; ( ( )) I N p k 表示表示第 I 個符元上第 ( )p k 個子載波所受到的雜訊,假設其能量為 1。我們可以使用平均的方式來降低雜訊影響如下: ( ( ), ( )) 1( ( ), ( )) ˆ ( ( ), ( )) 2 ( ( ), ( )) ( ( )) I I G p k p k G p k p k G p k p k G p k p k N p k + + = + (4-19) 如此雜訊N p k 的能量變成只有原來的( ( )) 1 4,達到降低雜訊的效果。4.1.3.2 通道追蹤 對於在半準態(quasi-static)假設下的通道而言,每個符元仍需要重新估測 一次通道,作為該符元 data detection 的依據。既然假設半準態,代表通道隨 時間的變化非常的細微,並且相鄰的符元所遭受到的通道影響必定存在一些關係 可循,所以我們可以利用鄰近的幾個符元估測出來的通道使得現有符元的通道估 測更準確。值得注意的是,此類方法看似對時變通道進行估測,事實上通道在一 個符元中仍是非時變的,因為不存在針對一個符元之內的通道變化做處理的機制 (沒有處理 ICI 的估測),所以吾人將此分類在非時變的通道估測之中。
對於此類通道追蹤的方法可使用 kalman filter[7],或者設定 forgetting factor 來追蹤下個符元的通道等等,皆可使估測的準確度增加。在此吾人介紹 Lin [6]在 2006 年所提出之 802.16e downlink 的通道估測法。
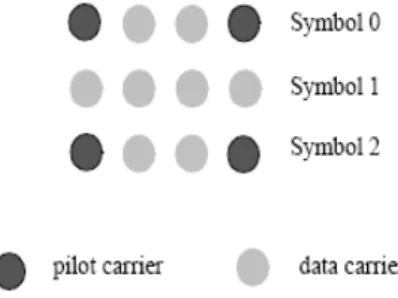
如圖 3-5 所示,802.16e 下行以一個 cluster(14 個子載波)作為單位,偶數 符元 pilot 放置在第 5 和第 9 個子載波上,而奇數符元 pilot 放置在第 1 和第 13 個子載波上。如此 pilot 只佔了一個 cluster 中的1 7 ,若以此條件做頻域上 的內插,在無線通道延遲擴散(delay spread)較大的時候將產生較高的錯誤率。 為了解決 pilot 數目不足之問題,Lin 利用了前後兩個的符元嚮導訊號之平均來 當做現有符元(current symbol)的嚮導訊號,如此可將一個 cluster 中的嚮導訊 號數目增加至 4 個,如圖 4-2 所示。
圖 4-2 時間平均的嚮導訊號之示意圖 接著我們必須利用這些嚮導訊號來估測出位於傳送資料之子載波上的通道 響應,也就是另外一個維度(頻域)的處理,而增加了嚮導訊號的數目代表對於通 道在頻域上的變化之估測可以更準確。Lin et al.[6]在這方面使用二次多項式 的最小誤差解來內插這些位於資料訊號的通道響應,假設頻域上之通道變化可用 一個二次多項式表示如下 2 2 1 0 ( ) 1, 2, ,14 y x a x a x a x = + + = K (4-20) 則在擁有四個已知點(嚮導訊號)的情況下有 Y = Xa (4-21) 2 0 0 0 0 2 1 1 1 1 2 2 2 2 2 2 3 3 3 ( ) 1 ( ) 1 ( ) 1 ( ) 1 y x x x a y x x x a y x x x a y x x x ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ (4-22) 其中{ , , , } {1, 5, 9,13}x x x x0 1 2 3 = 代表嚮導訊號在一個 cluster 內擺放的位置,則 係數a 可由(4-22)解得,此為 Vandermonde matrix 的最小誤差解。
T -1 T
a = (X X) X Y (4-23)
之後再把解到的係數a 帶入(4-20)即可完成該 cluster 的通道估測。由於在時域
的維度上使用線性平均,頻域的維度使用二次多項式之最小誤差解來做內插,所 以稱此二維通道估測方法為 LAQ (Linear and Quadratic)。
理論上對於半準態的通道變化而言,因為符元和符元之間的通道變化不大, 所以使用時間平均之嚮導訊號(time-averaged pilot)是合理的,同時也可以收 到 4.1.3.1 節中降低雜訊的效果並且增加嚮導訊號的數目來抵抗通道的延遲擴 展(delay spread)。另外由於使用最小誤差解來做內插,使得 LAQ 抵抗雜訊的能 力較其他內插法強,以上為其優點。
4.1.3.3 滑動式窗口之線性與二次方程式(sliding-windowed LAQ)通道估測 LAQ 雖然有不錯的效能,但是考慮到 802.16e 下行每個 cluster 之間通道響 應的連續性,我們有機會可以利用鄰近 cluster 上的嚮導訊號進而改善 LAQ 的效 能。2007 年 Kao[29]所提出的 sliding-windowed LAQ (SW-LAQ)就是這個例子, 如圖 4-3 所示。
首先從編號最小的子載波開始處理,選擇窗口(window)的大小之後,每次拿 取 4 個嚮導訊號作 LAQ 的內插,並且決定輸出區域(output region)。之後滑動 窗口到下一個可以獲得 4 個嚮導訊號資訊的位置,拿取 4 個嚮導訊號作 LAQ 的內 插,決定輸出區域。重複以上的動作直到窗口達到編號最大的子載波為止。
圖 4-3 sliding-window LAQ 的流程
4.2 時變通道估測(CE for time-varying channel)
OFDM 訊號若傳送在時變的通道中,接收到的訊號將受到次載波間干擾 (ICI),造成系統效能降低。所以在時變的通道下,ICI 消除(ICI cancellation) 是必要的,此方面的方法可參考[2][3][4]。然而大多數的 ICI 消除法都必須建 立在準確的 ICI 估測上,使得 ICI 估測(也就是時變通道估測)變得十分重要,此 為本節討論的重點。 本節將討論許多現有的時變通道估測法,並且分析其優缺點,最後就實作上 的考量設計出適合 802.16e OFDMA 的通道估測法。此外,為了方便說明起見,我 們將第四章所討論的組織架構列在圖 4-4。
圖 4-4 OFDM 通道估測分類圖 如圖 4-4 所示,圖右邊的非時變通道估測在 4.1 節中描述,而圖左邊的時變 通道估測則在本節作介紹。在時變的通道估測部分,對於 ICI 消除我們可以有兩 種想法。 z 第一種想法為,直接把 ICI 估測出來,再以此來做 ICI 消除。而時變通道的 估測未知數過多,所以我們需要對通道變化作出一些假設以減少未知數。 1999 年 Jeon[3]假設一個符元中,通道變化在 fnd <0.1時可近似為線性變
![圖 3-1 OFDMA 的 data region 範例 [8]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643061.138235/26.892.138.749.401.907/圖31OFDMA的dataregion範例8.webp)
![圖 3-3 OFDMA 在 TDD 模式下單一 segment 的訊框架構 [9]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643061.138235/28.892.132.729.100.1097/圖33OFDMA在TDD模式下單一segment的訊框架構9.webp)
![圖 3-4 OFDMA 下行 PUSC 的資料配置範例 [9]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643061.138235/30.892.169.736.140.731/圖34OFDMA下行PUSC的資料配置範例9.webp)

![圖 4-2 時間平均的嚮導訊號之示意圖 接著我們必須利用這些嚮導訊號來估測出位於傳送資料之子載波上的通道 響應,也就是另外一個維度(頻域)的處理,而增加了嚮導訊號的數目代表對於通 道在頻域上的變化之估測可以更準確。Lin et al.[6]在這方面使用二次多項式 的最小誤差解來內插這些位於資料訊號的通道響應,假設頻域上之通道變化可用 一個二次多項式表示如下 2 2 1 0( ) 1, 2, ,14y xa x a x ax=++ = K (4-20) 則在擁有四個已知點(嚮導訊號)的情況下有 Y =](https://thumb-ap.123doks.com/thumbv2/9libinfo/7643061.138235/51.892.142.754.112.473/外一個維度這方面使二次多項最小誤差內插則在擁有四個已知=.webp)
