行政院國家科學委員會補助專題研究計畫成果報告
※※※※※※※※※※※※※※※※※※※※※※※※※※
※ ※
※ ATM 網路 ABR 訊務管理及訊務源模型之研究 ※
※ ※
※※※※※※※※※※※※※※※※※※※※※※※※※※
計畫類別:□個別型計畫 ■整合型計畫
計畫編號:NSC89-2213-E-009-107
執行期間:89 年 8 月 1 日至 89 年 7 月 31 日
計畫主持人:楊啟瑞
共同主持人:
計畫參與人員:
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:國立交通大學資訊工程研究所
中 華 民 國 89 年 10 月 25 日
行政院國家科學委員會專題研究計畫成果報告
ATM 網路 ABR 訊務管理及訊務源模型之研究
ABR Tr affic Management and Sour ce Tr affic Modelling
計畫編號 : NSC89-2213-E-009-107
執行期限 : 89 年 8 月 1 日至 89 年 7 月 31 日
主持人 : 楊啟瑞
國立交通大學資訊工程研究所
1. 中文摘要 在這個計畫內,我們針對無線ATM網路提 出 了 一 個 新 的 智 慧 型 多 重 存 取 控 制 系 統 (IMACS),以支援不同於CBR和VBR訊務之 ABR和Signaling Control (SCR) 訊務。其最大 的目地是有效地滿足多種的服務品質 (QoS) 需求並能保持最大的網路產能。IMACS由三 部 份 組 成 : Multiple Access Controller (MACER) 、 Traffic Estimator/Predictor (TEP) 、 和 Intelligent Bandwidth Allocator (IBA)。計畫的重心是放在訊務源之評估與 ABR訊務之預測,亦即IMACS之TEP部份。 實驗結果證實採用TEP之設計,IMACS提供 不同之QoS保證,且隨訊務源之變化得到最 大之網路產能。 關鍵字:無線ATM網路、多重存取控制、頻寬 分配、品質服務、衝撞解決演算法、類神經 模糊技術、自我相似訊務源。 Abstr actIn the project, we have proposed a new Intelligent Multiple Access Control System (IMACS) for wireless ATM networks, supporting ABR and Signaling Control (SCR) traffic other than CBR and VBR traffic. It aims to efficiently satisfy their diverse Quality-of-Service (QoS) requirements while retaining maximal network throughput. IMACS is composed of three components: Multiple Access Controller (MACER), Traffic Estimator/Predictor (TEP), and Intelligent Bandwidth Allocator (IBA). The focus of the project is traffic estimation and prediction of ABR traffic, namely the TEP component of IMACS. Simulation results demonstrate that facilitated with TEP, IMACS offers various QoS guarantees and maximizes network throughput irrelevant to traffic variation.
Keywords: Wireless Asynchronous Transfer
Mode Networks (WATM), Multiple Access Control (MAC), Bandwidth allocation, Quality-of-Service (QoS), Collision resolution algorithm, Neural-fuzzy technique, Self-similar traffic.
2. Appr oaches and Results
IMACS is composed of three major components (see Figure 1): Multiple Access Controller (MACER), Traffic Estimator/ Predictor (TEP), and Intelligent Bandwidth Allocator (IBA). It supports four types of traffic- CBR, VBR, ABR, and SCR. IMACS has been designed to satisfy delay guarantees for CBR/VBR traffic while offering minimal access delay for ABR and SCR traffic. Accordingly, MACER employs a reservation-based access protocol for CBR and VBR traffic making use of a fixed amount of RC-type and
RV-type bandwidth (RC+RV= R) (in slots),
respectively. By contrast, for SCR and ABR traffic, MACER adopts a contention-based access protocol using CS-type and CA-type
bandwidth (CS+CA= C) (in slots), respectively.
In particular, due to the access-delay-sensitive
nature, SCR traffic is particularly governed by contention access using the DTS collision resolution algorithm parameterized by the optimal SD, denoted as DTS-d, if SD=d. The
focus of the report is the TEP component of the system.
TEP is responsible for the periodic estimation of the Hurst parameter (denoted as H), and the prediction of the short-term mean and variance of ABR traffic. Specifically, H is periodically estimated based on wavelet analysis [1,2]. The short-term mean and variance for the subsequent frame are predicted by means of an on-line neural-fuzzy approach [3]. Since the prediction of the variance can be similarly applied, in the sequel we describe the estimation of H and prediction of the short-term mean number of active MT's.
Contention Access without
Collision Resolution CBR/VBR Traffic
Call-based Frame-based Frame-based
Intelligent Bandwidth Allocator ( IBA ) Traffic Estimator/ Predictor (TEP) Reservation Access Contentio n Access DTS Algorithm (DTS-d)
Multiple Access Controller (MACER) SD (=d) R-type (RC + RV) Bandwidth CS-type Bandwidth CA-type Bandwidth SCR Traffic ABR Traffic
NFTP performs on-line traffic prediction based on a self-constructing neural-fuzzy inference network [3]. It is involved in two phases of learning: structure and parameter learning. The structure-learning phase determines the structure of fuzzy if-then rules, and the parameter-learning phase tunes the coefficients of the rules adapting to the input traffic dynamics. Unlike existing neural-fuzzy models using sequential learning, NFTP performs the structure and parameter learning in parallel. This makes NFTP advantageous for fast on-line prediction.
NFTP is a six-layer network taking on a number of input nodes and one output node, as shown in Figure 2. Initially, there are no rules in the network other than input nodes (layer 1) and an output node (layer 6). Upon receiving on-line training data, the structure-learning process proceeds by dynamically self-constructing fuzzy if-then rules (layer 3) according to an input-output clustering-based space-partitioning algorithm [3]. Once a new rule is generated, the centers and widths of the corresponding set of Gaussian membership functions (layer 2 and layer 5) are assigned. The output of a layer 3 node corresponds to the firing strength of the corresponding fuzzy rule, which is in turn normalized in layer 4. Consequently, the predicted output value, y, is
given as:
i i
y
y=
∑
, i= fuzzy rule index, andi i i n i m f y x A x i = Then is and ... and is If : rule Fuzzy 1 1
where yi is the contribution of fuzzy rule i to
the predicted output value, xj is the jth input
value, Aij is the jth membership function of
fuzzy rule i, fi is the normalized firing strength
of fuzzy rule i, and mi is the center of the
membership function in layer 5 connected to fuzzy rule i. Meanwhile, in the
parameter-learning process, the centers and widths of input membership functions (layer 2) are dynamically adjusted based on the Least Mean Squares (LMS) algorithm [3], whereas those of output membership functions (layer 5) are tuned using the Back Propagation algorithm [6].
Figure 2 illustrates an NFTP network with three inputs. This network predicts the future CNF value (N ), which corresponds to theˆ4 mean number of active MT's in the subsequent frame, based on three input values taken from
three most-recent CNF values (denoted as Ni,
i= 1 to 3). At the end of each frame, in addition
to predicting the CNF value of the next frame, NFTP also performs the learning operation described above. This is indicated in Figure 6 by the arrowed link pointing from the CNF of Frame 4 to the NFTP output node.
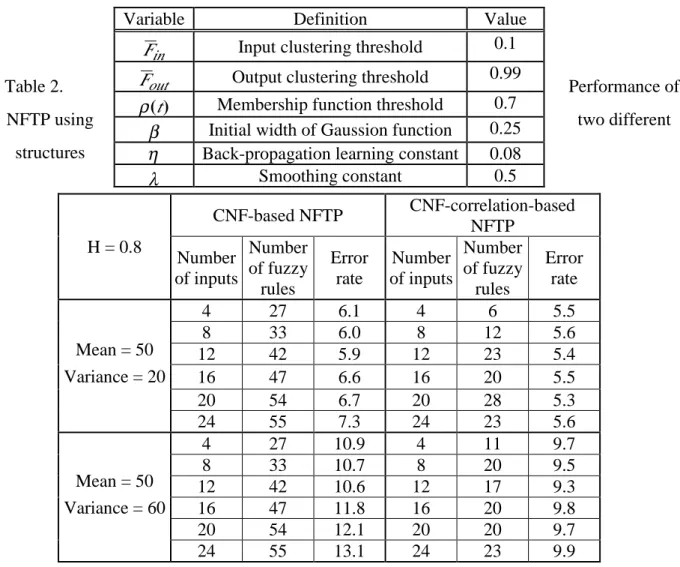
We experimented on two different NFTP structures using different types of inputs, respectively, via simulation. In the first structure, called CNF-based NFTP, the inputs
numbers of past CNF values (Ni), ranging from
4 to 24. In the second structure, referred to as
CNF-correlation-based NFTP, we adopted exponential-averaging k-lag correlation of
CNF values as inputs. Specifically, taking an example of NFTP with four inputsxk, k=1 to 4,
at the end of the ithframe, xk will be set as the
k-lag correlation Cˆ i defined as:
1 1− − + = i i i C C Cˆ λ ( λ)ˆ , where k i i i N N
C = × − , and λ is the smoothing constant (0<λ<1). With this structure, we also carried out 4 to 24 different numbers of inputs. In this simulation, we on-line predicted a set of 200 frames, using both structures of NFTP. All parameters used in the simulation are summarized in Table 1. In addition, the performance of NFTP is evaluated in terms of its prediction precision (error rate), time complexity, and space complexity. The error rate was computed as the normalized average
deviation between the actual and predicated CNF values. The space complexity was given in terms of the total number of fuzzy rules generated at the end of 200-frame prediction. Notice that, since such inference network can be implemented in hardware, we thus disregarded its time complexity. Simulation results are displayed in Table 2.
We observed during the experiment that the prediction error rate using either structure is irrelevant to the Hurst parameter (H), but highly sensitive to the variance. This can be perceived by the fact that by and large, H manifests only long-term behavior, whereas variance greatly reflects short-term fluctuation. In essence, as shown in Table 2 under traffic H=0.8, the error rate greatly increases with the variance. Furthermore, compared to CNF-based NFTP, CNF-correlation-based NFTP achieves greater precision (lower error rate) and lower space complexity (less number of fuzzy rules).
Legend: CNF= Common Notification Field; tc= Current time; Time CNF CNF CNF CNF
.
.
.
Frame 1 Frame 2 Frame 3 Frame 4
.
.
.
CNF Frame 5 tc NFTP 1 N 2 N 3 N 4 N 4 Nˆ R1 R2 R3 R4We finally discovered in the table that NFTP (either structure) with 12 inputs invariably exhibits better performance under both variances. Namely, small or large numbers of
inputs yield inferior performance for on-line prediction.
Table 1. NFTP parameters used in simulation
Table 2. Performance of NFTP using two different
structures CNF-based NFTP CNF-correlation-based NFTP H = 0.8 Number of inputs Number of fuzzy rules Error rate Number of inputs Number of fuzzy rules Error rate 4 27 6.1 4 6 5.5 8 33 6.0 8 12 5.6 12 42 5.9 12 23 5.4 16 47 6.6 16 20 5.5 20 54 6.7 20 28 5.3 Mean = 50 Variance = 20 24 55 7.3 24 23 5.6 4 27 10.9 4 11 9.7 8 33 10.7 8 20 9.5 12 42 10.6 12 17 9.3 16 47 11.8 16 20 9.8 20 54 12.1 20 20 9.7 Mean = 50 Variance = 60 24 55 13.1 24 23 9.9
3. Mer it Review of the Pr oject
The design and experimental results have been published in IEEE Journal of Selected Area on Communications. Moreover, we have designed several networking control systems making use of the mechanism, which has been
presented in various conferences (IEEE ICC’00).
4. Refer ences
[1] P. Abry, and D. Veitch, “Wavelet Analysis of Long-Range Dependent Traffic,”IEEE Trans. Inform. Theory, vol. 44, no. 1, Jan. 1998, pp. 2-15.
Variable Definition Value
in
F Input clustering threshold 0.1
out
F Output clustering threshold 0.99
) (t
ρ Membership function threshold 0.7
β Initial width of Gaussion function 0.25
η Back-propagation learning constant 0.08
[2] S. Giordano, S. Miduri, M. Pagano, F. Russo, and S. Tartarelli, “A Wavelet-based Approach to the Estimation of the Hurst Parameter for Self-similar Data,”Proc. DSP, 1997, pp. 479-482.
[3] C. Jung, and C. Lin, “An On-line Self-Constructing Neural Fuzzy Inference Network and Its Applications,” IEEE Trans. Fuzzy Systems, vol. 6, no. 1, Feb. 1998, pp. 12-32. [4] J. Beran, “Statistical Methods for Data with
Long-Range Dependence,”Statistical Science, 7(4), 1992, pp. 404-427.
[5] J. Beran, R. Sherman, M. Taqqa, and W. Willinger, “Long-Range Dependence in Variable Bit Rate Video Traffic,”IEEE Trans. Comm., vol. 43, no. 2/3/4, Feb./Mar./Apr. 1995, pp. 1566-1579.
[6] M. Yuang, P. Tien, and S. Liang, “Intelligent Video Smoother for Multimedia Communications,”IEEE JSAC, vol. 15, no. 2, Feb. 1997, pp. 136-146.
[7] V. Paxson, “Fast, Approxmate Synthesis of Fractional Gaussian Noise for Generating Self-Similar Network Traffic,” Proc. ACM/SIGCOMM, 1997, pp. 5-18.
[8] R. Addie, M. Zukerman, and T. Neame, “Broadband Traffic Modeling: Simple Solutions to Hard Problems,” IEEE Comm. Magazine, vol. 36, no. 8, Aug. 1998, pp. 88-95.
[9] R. Addie, D. Platt, and M. Zukerman, “Performance of a Pi Persistence Protocol Subject to Correlated Gaussian Traffic,”
Proc. IEEE INFOCOM, 1996, pp.