ON
WEAK
RESIDUAL
ERROR
ESTIMATION*JINN-LIANG LIU
Abstract, A generalframework for weak residualerrorestimators applyingtovarioustypesofboundaryvalue problemsinconnectionwithfiniteelementandfinitevolumeapproximationsisdeveloped. Basic ideascommonly sharedbyvarious applications in error
estimation
and adaptive computationarepresentedand illustrated. Somenumericalresultsaregiventoshowthe effectiveness and efficiency of the estimators.
Keywords,adaptivity,aposteriorierrorestimates,finiteelement,finitevolume,variationalproblems
AMS subjectclassifications.65N30,65N50,35J20, 35J60
1. Introduction. Adaptivity is a trend incontemporarycomputationalscience. The re-markableadvances inadaptive methodologyfor finite elementapplicationssince thepioneer
workby Babuka and Rheinboldt [7] have had aprofound impact on practical, large-scale computations.
There are fourtypes ofadaptivitywhich can be identifiedby the letters r
(relocating
nodes),h
(mesh
sizehrefinement),p(spectralorder pincrement),andhp (both hrefinement and pincrement). Alladaptivemethodsrequiremoreor less aposterioriinformation aboutthecomputedsolutionforoptimizingoverallcomputationalefforts in the sense that the methods deliver agivenlevel ofaccuracywitha minimum ofdegreesof freedom.
In
essence, thea posteriorierror estimation canberegardedasthe heart of the adaptivemechanism. Inthedevelopmentof a posteriori error estimators, three main approaches maybe distinguished [22], [29], namely,those based on residual,postprocessing,orinterpolationtechniques. Our
estimatorsherefollow the firstapproach.
In
the firstapproach ithas becomepracticallystandardtospecifythe interior residuals intermsof thegoverningdifferentialequationandtomeasuretheboundaryresidualsbythejumps in the normal derivatives on the interfaces between elements; see [3], [4], [6], [7], [8], 11], 19]. The various error estimators then differessentiallyin theway thejumps are handled.
In
contrast, we considerhere error equations (or inequalities)in which the right side isaresidual of thecomputedsolution inweak form. It appears tobe naturaltocall theresultingerror estimatesweak residual estimators.
A
specialcase,ofthe estimators seemsto be firstproposed by AdjeridandFlahertyin 1]. The weak residualerrorestimators tendto be morewidely applicablesince, in many applications, the governingequation maynotbe available in differentialform.In
recentyears, there has beengrowingevidence, intheory aswellasin application, showingthepromiseof the use of weak residual estimators; see[1], [2], [9], [21], [25].
Thispaper attemptstogive an overall view of the weak residual error estimation in con-nection with theadaptiveprocess,different numericalmethods,and varioustypesofboundary
valueproblems. The numericalschemes ofparticularinterestbelongto twofamilies ofwidely
usedmethodsnthe finite element method
(FEM)
and the finite volume method(FVM).
All estimatorspresentedhere canbeextractedto twobasic components whichareweak residuals andcomplementaryfinite
element(FE)spaces. Twotypes ofcomplementary spacescanbe classified. One istheconforming typewhichtogetherwiththeoriginalFE
space preservesthecontinuity across adjacent
FEs.
This in turncorresponds to an elementwise error esti-mation using error residuals onlyinteriorto elements. The estimators used in [1], [2], [9],*ReceivedbytheeditorsMay24, 1993;acceptedfor publication(inrevisedform)April 24, 1995. Thiswork
wassupportedinpart by NSC grant82-0208-M-009-060, Taiwan,ROC.
tDepartment
of Applied Mathematics, National Chiao Tung University, Hsinchu, Taiwan (jinnliu@math. nctu.edu.tw).1249
[25] areof this type. The otheristhe nonconforming typewhichinstead uses both interior andboundaryresiduals foreach element. Itis shown in[21 that thenonconformingtype is
independentof the
FE
order used for thecomputedsolution, whereas the conforming typeconsiders more
closely
theeffect of the order of theFEs
1],[8]. While thisstudyisnotcom-prehensive,wedo illustrate thetwocomponentsin error estimation and theadaptive process byfour modelproblems; namely,weconsiderellipticboundaryvalueproblems, parametrized
nonlinear equations, symmetrichyperbolicequations, andvariationalinequalities.
In
2,
the error estimators are derived inageneralframeworkbymeansof abstract varia-tional formulations. Definitions, notation, and basic ideas are then introducedalongthe course of the derivation. Althoughthe estimators arenotrestrictedtoany particular typeofadaptivity,wealso discussbrieflyastandard h-refinementstrategyintwospacedimensions. In
3,
the four modelproblemsand thetwonumericalmethodsarespecificallyusedtodemonstrate howtheycan becastintothegeneralframework. Finally,in
4,
numerical results aregivenwithrespecttoeach subsection in
3
toshow the effectivenessandefficiencyof the estimators.2. Backgroundand basic ideas. The aim of thispaperistooffer,totheextentpossible,
aglobalviewof the use ofweak residual error estimators. Itisinstructivetosummarize some fundamental features which constitute variousadaptivemethods for various modelproblems
considered herein.
2.1. Abstract variationalproblems.
Let
f2 be a boundedregion in the plane with aLipschitz boundaryOf2
Of2z
U 0"2NandH
k(f2)andH (1-’), I" C 0, be theusualSobolevspaces equippedwith the norms
II"
Ilk
and].
Ir,
r, respectively.Let
H(f2) CLz(f2)
be a Sobolev space equippedwith the norm]1.
]].
For simplicity, we assumethat all functions inH()
satisfy a homogeneous Dirichletboundary condition on O f2z, ifany.Let
K
be a closed convex subset ofH(f2). Let FH()
--+ R be a continuous linear form. Let B(., .)H(S2)
xH(S2)
--+ Rbe a bilinear form such that there existtwopositiveconstants/3,
6and anonnegativeconstantofor which(2.1)
(2.2)
B(u,v) <
fl]]ul]
]]vll, u,v E H(f2), (u,u) >_allull
2-llullg,
u eWe
shall consideraclass ofvery general problemsinan abstract variationalsetting: Find u E Ksuch that(2.3)
B(u,v)
F(v)
> B(u,u)F(u)
’v
K.Dependingonthe definition of the closed convexset
K
and thepropertiesof the bilinear formB,
the abstract variationalproblem(2.3)
cangive various equivalentformulations ofproblems which willbe exemplifiedin
3.
Discussions ofwell-posedness of the problem(2.3),
in some selectivesettings,canbefound, e.g.,in[13], [18].2.2.
FE
spaces. To discretize(2.3),
we introduce S a finite-dimensional subspace ofH
()
characterizedbyamesh sizeh and associated with aregular,butnotnecessarily quasi-uniform,triangulation7-
onS2. To approximateK,
weconstruct aclosed convex subsetKs
ofS. Theapproximateproblemof(2.3)
isthentofindUs 6Ks
such that(2.4) B(us,
Our objectiveistopresent various error formulationsonwhich various aposteriorierror estimatorsassessingtheexacterrorbetween the solutionsuand
us
of(2.3)
and(2.4), respec-tively,arebased. All estimators can be extractedto twobasic components--weakresiduals andcomplementaryFE
spaces. Wefirstdiscussthecomplementary spaces.For
the sake ofefficiency,the estimatorswillbebasedonlocalcomputations. Weintroduce somelocal functionspacesthat we willrequire. Associated withT,
letSbe anotherlargerFE
subspace ofH(f2), i.e., S C.
Let
H(r) denote the restriction ofH()
to r 6 7-andHT-(S2)
l-IeT-
H(r)
denote thespace ofpiecewiseH(f2)
functions.For
instance, ifH (S2)
H
(f2),thenHT-
(f2)willbe thespace ofpiecewise H functions.For
v,winHT-
(f2),wedefinethe brokenL2innerproductand normby (v, w)
YeT-(v,
w),Ilvll
(v, v),analogously,
the brokenH(f2) norm,Ilvl[
2Yv7
Ilvll(.
Note
thatH(f2) C HT-(f2) CL2()
and the above definitions reducetothe usual ones whenever v, ware inH(f2).Let
be split intotwosubspaces
S
S,
SC)S{0}. Let
S
denote therestrictionofS to r 6T
and letSr
1--It,7-
s.
We
shall consider inparticularthe splitting(2.5)
7-
SS,
SfqS-
{0},
Sr
7 0.Thespaces
S
and $7- arespacesof piecewise polynomialslocallydefined ineach element r in7-.
Note
the inclusions C7
C HT-(f2) and S CSr.
The error estimatorsgivenin
3
willbe calculated in thecomplementary spaceS-.
We assumethat the bilinear formBcan define an innerproduct B(.,
.)
on7
and with it theenergynormIwl
2 B(w,w).
Allerrorestimatorsbelow aremeasured in this norm,although,intheory, theyarenotstrictly
restrictedtothisnorm.
2.3. Abstract variational error formulation. Lete u Usdenote theexact errorof the approximate solution
us.
Wenow derive ageneralformulationfor theexacterror interms of theapproximatesolution. Substitutingu e+
us
intoproblem (2.3),wehaveB(e,v) F(v)
+
B(us, v)> B(e,e)
+
B(e,us)
+
B(us,e)
+
B(us,Us)
F(e) F(us)Vv
K.
Note
that the bilinear formB
can be nonsymmetric.By
rearranging terms in the aboveinequality,we can rewrite this as
B(e,v Us) [F(v
> B(e,e)
[F(e)
B(us,e)] Vv6 K.The left-hand side of theinequalityclearly suggests thatwe can definethe following new closed convex subsetby translating the original convexsetK with respecttothecomputed
solution us"
K’--
K-Us C H(f2).Moreover,
byvirtueof the boundedness of the bilinear formB and the linear functionalFonH (f2),the Rieszrepresentationtheorem shows that there exists auniquelinearfunctional
G
on
H
(f2) definedby(2.6)
G(w)
F(w) B(us,w)’w
H(S2).
We
callGaweak residual in contrasttothe usual formulation in which the residual is interms of thegoverningdifferential equation usedby manyauthors [8], [11], [19].The error estimation is then based on the following new variational (error) problem:
Determine e 6 K such that
(2.7) B(e,w) G(w) > B(e,
e)
G(e)
The reason we use the weak residual formG instead of the governing equationistwofold. First, since
us
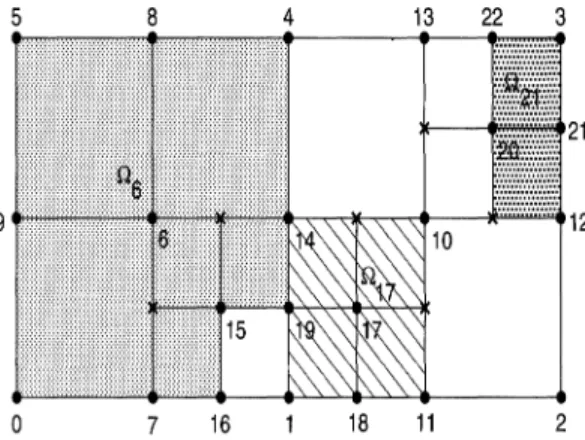
is itself anapproximatesolution, its second derivative, for second-orderpartial5 8 4 13
0 7 16 18 11 2
FIG. 2.1. 1-irregular meshrefinement.
differentialequations (PDEs), in thesense of distribution willfurther incur error. Second,
formany applications, thegoverning differential equation may not be available, i.e., only
theintegralform is available. Forsuch cases, the formulation of errorproblemslike
(2.7)
is certainly moregeneral.2.4.
A
mesh refinementstrategy.
There aremany refinement strategies proposedin the literature. The error estimatorspresentedhere arenotrestrictedtoanyparticularadaptiverefinement.
In
fact,it has been shown in[21 that there isnoorder restrictionfor theFE
spacesused in theapproximatesolutionorin the error estimation; thatis, theerrorestimators canbe used in connection withanyone of theh-, p-, orhp-versions of the
FEM. In
the numericalexperiments,to test ourerrorestimators(see
4),
weuse inparticularthe so-called 1-irregular mesh refinementstrategyfirstproposedin[7] and later detailed in 14]. Sincethe refinement scheme hasbeen extendedtoincludeadaptivefinitevolumecomputations,webriefly discuss its basicfeatures.Recall thatanode is calledregularifit constitutesa vertexfor each of theneighboring
elements; otherwise it is irregular.
Figure
2.1 shows a particular 1-irregularmeshwhere irregular nodes markedby areallof index-1 irregularity,that is, the maximum number ofirregularnodesonanelement side is one.
In
implementation,nodegreesof freedom will be associatedwiththeseirregularnodes.Hence,
supportsof theshapefunctionsdefiningabasis for anFE
spacechange adaptivelywith mesh refinements; forexample,theshaded subdomainsf26, f217,and
f2el
arethesupportsoftheshapefunctionscorresponding, respectively,totheregularnodes6, 17,and 21 inFig.2.1. The
FE
spacessoconstructedpreservethe conformalityrequired bythe standard
FE
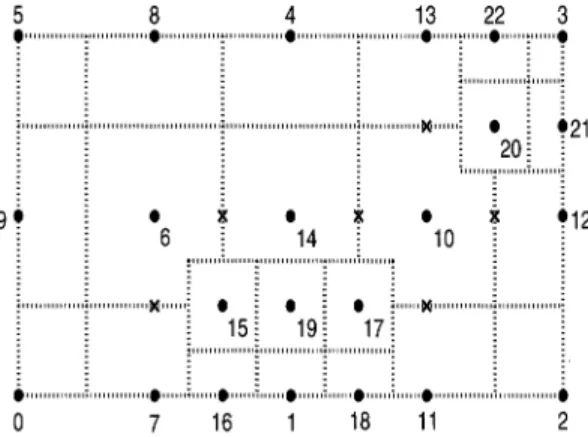
approximation provided that some special element constraint methods are usedtoinvokecontinuityacross interelement boundariesofelements of different sizeand withshapefunctionsofdiffering polynomialdegree [14].For finite volume approximation, control volumes have to adapt accordingly to their dual elements. Let/ denote the dual mesh for7-.
Note
that theFVM requires a control volume foreachregularnode wheredegreesoffreedom are defined. Thus,inparticular,23 control volumesin the dual mesh of Fig. 2.1 are constructed andshown, bydotted lines, inFig. 2.2. Notice that thepatternof the boundaries of control volumes appearinginelements
maydifferelementbyelement. Thisplaysan essential role in theimplementationsincemost
computations, approximations,aswellaserror estimations, aretobeperformedelementwise before the assemblingprocess.
3. Modelproblemsand numerical methods.
We
nowapplythe
generalformulations and the basic ideas discussed above to four modelproblems in connection withFEM
andFVM.
5 8 4 13 22 3 0 o .21 20i
9.
o i o i o:
.12 6 14 10 o o o 15 19 17: +, I, 0 7 16 18 11 2FIG.2.2. Adaptive control volumes.
Sincethe aposteriorierror estimation isthe heart of acomplete selfadaptivemechanism, we stressparticularlyvarious errorequationsorinequalitieson which the errorestimatorsare based. Some rigoroustheories ofthe estimators can be found in [2], [21 ].
We
first note that if theclosed convex set Kin(2.3)
isitself the Sobolev space H(f2),then theinequality
(2.3)
reducestoa variational equation. In3.1-3.3,
3.5 wewilladdress thisequalityform.3.1. Elliptic boundaryvalueproblems. Considertheboundaryvalueproblem
Lu
:--
-V.(aCx)VuCx))
+
bCx)uCx)
f
Cx) in(3.1) Ou
u--0 on
O’D,
a(X)-’--g(x)
onO"N.
The associated variationalproblemis tofindu
H(2)
such that(3.2)
BCu,
v)(f,
v)+
(g,V)Oau
’V’V
H(f2),
where
H(fl)
{u
eHI()
u 0onOD}, B(u, v) "=f
(aVuVv+
buy)dx,(f
v)"=fa
f
vdx, {g,V}aau
"=f
gv ds. "UTo
beginwithandtoavoid technical details, wealways assumetheuniquesolvability of the variationalproblemsconsidered here and below.Note
thatwedonot assumethe coefficient functionb(x)in(3.1)
tobestrictly positiveinS2, hence the error estimatorstobegiven applytoindefiniteproblemsaswell[21 ].
Correspondingto
(2.4)
and(2.7),theapproximationand errorproblemsfor(3.2)
areto determineUs 6 Sande 6 H (f2) such that(3.3)
B(Us,V)Cf, v)
+
(g,v}OaN
’V’V
e Sand
(3.4)
BCe,
v)-BCus, v)
+
(f, v)
+
(g,V}Oau
YV
HCf2),respectively,wherethecomputed
FE
solutionUs canonlybe assessedaposteriori, i.e., after itsavailability.Since thespace H() is still infinite dimensional and the discretization of(3.4)inthe
original
FE
space S only producestrivial estimated errors,(3.4)
has to be solved in alarger space S.However,
thiswould cause the error calculationtobeimpractically expensive since(3.4)will result in a larger
system
ofequationsthan that of(3.3). Hence,
the use of thecomplementary subspaces appears tobe natural. Nevertheless, if thesubspaceis chosento be S
c,
the error calculationmay involve aglobalsolutionto asystemof equations.We
are thereforeledtoconsider thecomplementary subspacesS-
C HT-(S’2) and, consequently,to solve thefollowingreducedproblem: Determine 6S(ri),
ineach element"giIT,
such that(3.5)
B(g,v)
-B(u,,v)
+
(f,
v)+
(g,V)Oau
YVSr(ri).
Note
that ifS-
CH
(),aconformingsubspace, theunique solvabilityof(3.5)
can be ensured as that of(3.3)
andonlythe interior residual in each element will be used. Onthe otherhand,ifS-
CHT-(S2)
but not inH
(2),anonconformingsubspace,then(3.5)
results in anonconforming solution scheme [13] and the estimation willinclude both interior andboundaryresidualsforeach element. With some moderate assumptions on the bilinear form and thecomplementary spaces(sufficientlylarge),itis shownin
[21
that theuniquesolvability for suchproblemsstillholds.As noted already, the error residuals can be expressed in either differential or weak form.
We
brieflydescribe thedifferences between thesetwoapproaches. Formoredetailed theoreticalinvestigationwereferthereaderto 11],[21 ].Let
Ebe the collection ofcurves which forms anedgeof an element r in T.Thesetofedges maybedecomposedasthe unionoftwodisjointsetsE
EB
UEI,
whereEB
istheset ofedgesonOandE1
isthesetofedgesin the interior of.
ForeachedgeeinE,
we define anormal directionnne.
More
specifically,n
istheusual outward normal when e 6E
while, for e6EI,
its choice isarbitrary.Let
tin,’out be two elementssharinganedgeeinEz
andsupposethat the normalnisoutward fromtin. Then, for xone, thejump and theaverageof v onearedefined,respectively,by
1
[V]J(X)
)(X)]out-
)(X)ll-in
and [VJA(X{)(X)l-gou
+
)(X)lz’in
},Substituteu e
+
us
into(3.1)
andmultiply bya test functionv;then we obtain, in each element r,(3.6)
(Le, v)r -(Lus,v)r
+
(f,
v)r,where
Lus
is definedin thesense
of distributions. Now integration by partsofthe lefttermin(3.6)
yields(3.7)
(ge,v)r
B(e, v)a-n,
v+
a--n
vEr Er
andaftersumming
(3.6)
overall elements, we find that(3.8)
B(e, v)(f
Lus,
v)+
g-a-n
V+
a--n
vON J E1
This isthe standard formulation forestimatingerrorsusedby manyauthors[7],[8], 11], 19]. Onthe otherhand,if theterm(Lus,
v)
in(3.6)
isrewritten as in(3.7),then in each elementr, we obtain
B(e,v)r a_-SS v -B(u,v)r
+
(f,
v)r.Hence
a summationoverall elementsleadstoB e,v a
-n
V F,
a-n
j[V]A)
-B(us,v)+
(f,
v), E1whichgives
(3.4)
with more generaltest functions v E HT-(f2) if theexact solutionu isinH2(2).
It
isnecessarytoreusethe differentialoperator Lwhen the estimators arecalculated based on(3.8). In
contrast, intermsof(3.4),
the same bilinear formulation(3.2)
canbe used in bothapproximationand error estimation. This is certainlypreferable,from the
user’s
viewpoint, inadaptive implementation.
Moreover,
theformalapproachcanonlyutilizethecomplementary spacesS-
in anonconforming settingwhilethe weak residualapproach maybeused in either aconformingoranonconformingsetting. Finally,in 11],thefollowingsaturation condition isintroducedfor thespaces used in the erroranalysis:(3.9)
Ilu
ulll
+
h/2
[
aOu-ul
I
_<p(h)211u
ull2,
On J
where
.
u
istheapproximatedsolution(for analytical purposes only) soughtinthelarger spacesIt
isassumed thatlimh-0
p 0; that is, hashigherorder than S. Onthe otherhand, in weak form, the saturation condition is asfollows:Ilu-ullpllu-u,ll, 05p<l.
Thus the condition
(3.10)
is somewhat weaker than(3.9)
sinceitallows theFE
ordersofSand tobeequal (see, e.g., [21] andExample4.2
below).
The introduction of thejumpsin thenormal derivative of thecomputedsolutionsatinterelement boundariesactuallyforces p tobecomelargerand hence deteriorates the quality of the error estimator[21]. Almost alldifferential-typeresidual error estimators[3], [4], [7], [8], 11], 19] requiresomecompatibility
conditionsorauxiliarylocalproblemstoovercome this intrinsicdifficulty simplybecausethe distributionandjumptermsare included inthe residual, i.e., theright-handsideof
(3.8).
These conditions orproblemsaresomewhat ad hoc dependingstronglyonthe modelproblemunder consideration; see the above references. Thecomplementary spaces are essential for both differentialand weak residualapproaches. Withthe weak residualform, one canconcentrateprimarilyonthe construction of theshapefunctionsof
Sr,
which can stillhandlejumpsacross element boundaries(withanonconforming setting),iftheyare dominant errors.The norm
II1111;
--: Oi, for eachelementz’i E’,
is called theerror indicatoroftheelement which assesses thequalityof theapproximatesolution
us
inthiselement and indicates whether theelement needstobe refined, derefined, orunchanged. Summingoverallelements,theerror estimatorforUscanbe definedby
II1111
Y]iTheerrorestimator canserve as one ofthemajor stoppingcriteria for an entireadaptive process.
Thequalityof aproposederror estimator isusuallytestedbyvarious modelproblemstowhich
theexactsolutions areexplicitlyknown.
A
computableeffectivity index 0=isusuallyintroducedtoquantifythequalityof the estimatorand,consequently,thequalityof theapproximatesolution.
3.2. Parametrized nonlinearequations. Stationary problemsformany scientific and
engineeringproblemsaremodeledbyaparameter-dependent equation
(3.11)
F(u,)) =0,where u is a state variable, 2 is a d-dimensional parameter vector, and F denotes some differentialoperatoronasuitablestate space. Typically,the solution set
M
F
-1(0)
turns outtobe a differentiable submanifold
M
of dimension d of theproductX
of the statespaceandtheparameter space. This can beensured, for instance, when
F
is aFredholmmapof indexd onX [23].Allstandard discretizations of aparametrized boundaryvalueproblem
(3.11)
leave the parametervectoruntouched and henceapproximatetheequationsbysomefinite-dimensional system Fs(us,)
0.Hence,
under suitable conditions, we may expect the solution setMs
F-I
(0)
to be ad-dimensional submanifold of some discretizationspaceXs.
Frequently,Xs
canbe embedded in X and then the discretization errorrepresentssome measure of the distancebetweenM
andMs
inX.Our
goalnow is to estimatethe discretization error. There aretwomajorissuesfor the error estimationofMs.
The first issueisefficiency.It
isintrinsicallymoreexpensivefor nonlinearparametrizedproblemsthan it is for linearproblems. Thesecond issue isconsistency.
It
is wellknown [23]that the parameterdependencecausesthe discretization errortobecome a local concept whichdependsonthe choice of the local coordinatesystemon themanifold.For
instance, in the continuationmethod,wemustoften fix a local coordinatesystemforcalculating
severalpointsonthe manifold and thenchangethe coordinatesystemasneeded, and so on.
However,
for error estimation, the coordinate system isusually fixed, [23], throughoutthe entiremanifoldand hence isnotapplicablenearany foldpointwithrespecttotheparameter space. Themainwaytoresolve these difficulties istouse linearizationand a local coordinatesystem.
At
anyx0 (u0,)0) 6M,
we define alocal coordinatesystemthat satisfiesthefollowingconditions:
(3.12)
X=WT,
dimT=d,WkerDF(xo)={O}.
it isshown in[25]that the constrained linearized(infinite-dimensional) problem
(3.13)
F
(Xs)+
D F (Xs)CO O, rc(CO)
O,
for
(3.11)
has auniquesolutionco x0 Xs 6 Wwhichistheexact errorofthe approximate solutionxs
(Us,)s).Here
7r 6L(X)
is anaturalprojectionofX
ontoT
alongW.
TheFE
approximation of
(3.11)
isofinteresthere.We
consider, inparticular, thefollowingmildly nonlinearproblem: Find(u, .) 6H
(f2) xA
such that(3.14)
(F(u,)), v) :=
j
[a(k,)Vu Vv
+
g(u,),)v]
d
0Yv
6H0(fl),
whereF
X
H
(S2) xA
--+Y
H
-1(f2)
and the coefficient functionsa and g aregivensothat theproblemiswellposed.
Apparently, the nonlinearproblem
(3.14)
does not fit into the general variational for-mulationgivenin theprevious section.However,
itsweak residual form can becastinthe framework of the variational errorsetting.In
weak form(3.13)
requiresthe deterrnination of(w,/x)
EHd
x Asuchthat(3.5)
(3.16)
B(w,v)+
C(#,v) -(F(us, ‘ks),v)
Yv eH
(f2), rr(w,t)
=0, where B(w, v):=
Ja(.a(‘ks,
)Vw
Vv+
gu(us,‘ks,)wv) d,
c(..
.) .= .)v.,v,
+
(gz(Us,,ks,)
#)v)d.
At
any computedpoint (us, ‘ks) eMs,
our aposteriorierrorestimates thusrequirethe determinationof(t,/2)
6Sr(ri)
x A such that(3.17)
B(t,
v)+
C@,
v) -(F(us, ‘ks),v) Yv
S("ci)
(3. 8)
zr(,)
=0.The choiceof the local coordinate systematany pointx0on.Misarbitraryaslongas it
satisfiesthe conditions in
(3.12). By
definition, the local coordinate system(3.12)
and hence the constraint7r(co,/x)
0 canchange frompointto pointonthe solution manifold.We
choose T
kerDF(xo)
inparticular. The constraint(3.18)
is then equivalentto(t,/2)
6Ws
Xs
C) Wwhichis orthogonalto the d-dimensionalsubspaceT
kerDFs(xs) ofXs
correspondingtothetangent spaceof
Ms
atthecomputed pointXs. IfA
is one dimensional and astandard continuationprocessisused, then a normalizedtangentvector isusuallyavailable ateachcomputed point. Analogously,inthemultiparametercase, if atriangulationofMs
iscomputed bythe method of[24],thenagainorthonormal bases of thetangent spaceareavailable at the computed points onthe manifold. This uniform treatment of the aposteriori error estimation alongthecomputedmanifold
Ms
avoids aforementioneddifficulties. Moreover,
the introductionof the linear,local,solutionscheme ensures that the method iscomputationally relatively inexpensive.
An
aposteriorierror estimation has beendevelopedforstronglynonlinearequationswith ascalarparameterin[27]. There theasymptoticexactnessof a residual estimator wasprovedunder suitablehypotheses. Tsuchiya’s approach requiresone to fix the local coordinatesystem
intwostages.
In
the firststagebefore the turning point, the system is definedbythenaturalparameter.
In
the secondstagewhen the continuationprocess is nearand after theturning point,thesystemisthenrotatedby90degreesthusallowingamoreelaborate error estimate neartheturning point.In
the senseof the definition of the local coordinatesystem,this is aspecialcase of ourapproach.
Moreover,
Tsuchiya’sapproach requiresaglobalsolutiontothe linearizedresidualequationsfor error estimation.3.3. Symmetric hyperbolic equations.
In
thetheory ofPDEs
thereis afundamental distinctionbetween those ofelliptic, hyperbolic,andparabolic types. Thetheoryofsymmetric positivedifferentialequations developed byFriedrichs 17]isknown for its unified treatment,analytically aswell asnumerically,for
PDEs
thatchangetype within the domain of interest such as the Tricomi problem and forward-backward heat equations.In
the developmentof the error estimator for the Friedrichs system, we use inparticularthe
FEM proposed
byLesaint[20].
An
unknown p-dimensional vector-valued function defined on f2 is given by u(ul,u2
Up)
r.
Let
f(fl,
f2
fp)
Tbeagiven p-dimensional vector-valued functiondefinedonf2. Lettheoperators
L
andM
be definedbyand consider the followingsystems: 2Ou
(3.19)
Lu(x)
:--E
Ai(x)-ff--
+
Ao(x)IIf(x)
for xi=1
(3.20)
Mu(x)
:= (#(x)(x))u(x)
0 forxwhere/3
Y=I
niAi, theni’s
beingthecomponentsof theouternormalon0f2. ThematricesAi, 1,2,aresymmetric, Lipschitzcontinuousinx (xl, x2)for x
f.
The coefficients of the matrixA0
(x)
ofL (RP) arebounded in f2. Thematrix/z (x)
ofL
(Rp) is defined for xa
sothat theboundarycondition(3.20)
is admissibleand theoperatorL
is positive in the sense of Friedrichs 17];i.e.,(i) #(x)
+/z*
(x)
ispositive semidefinite on0f2, (ii) Ker(/z-/3)
@Ker(/z,+/3)
R
pon0f2, and (iii)A0
+
a
-’=l
oai >_Co1 Yx6,where/z*
andA
areadjointmatricesof/z
andA0, respectively,co
isapositiveconstant,andIisthe identity matrix.
Theadjoint operators L*andM*of
L
andM
are defined,respectively, by(3.21)
(3.22)
2 0,
L*v(x)
"=-/.=
xi
(Ai(x)v(x))at-Ao(x)v(x)
Vx
M*v(x)
:=(/z*(x)
+/3(x))v(x) ’v’x
6Let
(q, g) :=fa
q(x). g(x)dx and(q, g) "=f0a
q"gds,whereq.g=1
qigi.One variational formulationof(3.19)and(3.20)
istofindu 6(H
(f2))p such that1
(3.23)
B(u,v)
(Lu,
v)+
(u,
L’v)
+
(/zu,
v)
(f,
v)Vv
6(HI())
p.
For
any given approximatesolutionu, 6(S)
p C(H
(f2))p of(3.23),againanalogousto(2.7),the error estimator
(3.23)
canthen be calculatedby solvingthe reduced errorproblem:Determine 6
(S-)
psuch that(3.24) B(fi, v)
(f,
v) B(u,v)
Vv(Sr)
p.
Since the boundary conditions
(3.20)
and(3.22)
for test and trial functions u and v, respectively, are different, this would make itimpossible toshow thecoercivityin asimplemanner iftheadjoint operator L*werenotincluded in
(3.23).
Withthe formulation of(3.23)
and Friedrichs’s identities 17],thecoercivityisguaranteedin[20]butonlyinthe lower-order norm, i.e.,
II0, instead
of thegeneral Grding-type inequality (2.2).3.4. Variationalinequalities.
In
theprevioussubsections, in terms of abstractsettings,theclosed convexset
K
isthe SobolevH(S2)
itself. This inturnleads to variationalequationsfor theprecedingmodelproblems.
In
this subsection, we deal with variational inequalitiesformulated in thegeneral form(2.3)where now the
K
is indeedaclosed convex subset ofH (). As
we would inatypicalproblem,weshall now also consider the abstractminimization
problem: Findu 6 Ksuchthat
(3.25)
J (u) inf J (v),vEK
ONWEAK RESIDUAL ERROR ESTIMATION 1259
where the functional J H(f2) --+ R is definedby
1
J(v)
-
(v, v) F(v),providedthat the bilinear formB(., .)is symmetric andH(f2)-elliptic,i.e.,ot 0 in
(2.2).
Correspondingto
(2.4),
(3.25)
reducestothe finite-dimensionalapproximate problem(3.26)
J(us) inf J(vs),Vs Ks
which, under suitable conditions on the approximate convexset
K
[16], [18]canbe solvedbymathematicalprogramming subjecttoa finitenumber of constraints inducedby
Ks.
Clearly, the variational error problem (2.7) suggeststhe needed formulation for error
estimation;that is, determine
Y
6 K such that(3.27)
B(,
w)-G(w)
>B(, )- G(,)
VwK.,
where
K
is acomplementary closed convexsetofSr
under similar conditions as those ofKs.
Inequality(2.7)
alsosuggeststhat a new functional can be defined intermsof theweak residualG, namely,1
E(W)
-
B(w, w) a(w).Consequently,wehavethefollowingreduced minimizationproblem: Determine 6 K such that
(3.28)
E(g) inf E(w).weKc
3.K The finite vlume element method. There aremanyvariantsof
FVMs. We
con-siderspecificallythe finitevolume element method(FVEM). As
noted in[12], the FVEMwas developedas anattempttouse
FE
ideas tocreate amoresystematicfinitevolume(FV)
methodology. The basicideais toapproximatethe discrete fluxes needed inFV by replacingthe unknownPDEsolutionby,an
FE
approximation. Itturns outthattheapproximatesolutionby FVEMis infactsoughtina standard
FE
trial function spacewhereas thecorrespondingtestfunctionspaceconsists of volumewiseconstantstepfunctions
(zero-order
polynomials). In [10],Bank andRosetermed theFVEMthe box method and showed that, under reasonablehypotheses,the solutionubgenerated bythe
FVEM
isofcomparable accuracytothe solutionu
generated bythe standard GalerkinprocedureusingpiecewiselinearFEs.
More precisely,the apriorierrorsofub and
u
are of the same order intheenergynorm.As
far asaposteriori error estimation is concerned,there are surprisinglyfewer results available for theFVMs
than for theirFE
counterparts.From
theabove
observationsandbythe actualimplementationfeaturesof the
FVEM,
wecan seethatFEMs
andFVMs
dohavemany importantsimilarities in error estimationandtheadaptive, process.
Firstofall,theFVEMsolutionubis itself anelement of the standard
FE space
Sassociatedwiththeregularmesh
7-.
Therefore,it isperfectlyallrighttoreplaceu
byu
in(2.6)
sothat the weak residualGisnow in terms of theFV
solutionub. Second, since the solutionubwascomputedwithdegreesoffreedom definedatthe nodalpointsof elements instead ofvolumes,
itisquitereasonabletodo the error estimationonanelement-by-elementbasis. Third,most
computationsinpracticearecustomarilycarriedoutelementwise,includingcontrol volumes which are constructedaccording to theirdual elements; see, e.g., [10], [12]. Finally, it is
interesting to explore how the well-established adaptive features of
FE
technology canbe utilized inFV
computations.In
short,it isplausibletodeveloperror estimators fortheFVEM
elementwise insteadof volumewise.
We
consideragain the selfadjoint elliptic boundaryvalue problem(3.1).
Forthe FVelement approximationof(3.1), we follow,the formulation proposedin [10] which is in a moregeneral settingthan that in[12]. TheFVEM (orthe boxmethod)for(3.1)isdefined as follows: Findub 6 Ssuch that
(3.29) where
?(u,
)+
(b,)
(L
)w
eP0(t),
OUb
[1
(Ub,f)Z
a f;ds, biE bi Oiland
P0
(/3)
denotes thespaceof discontinuouspiecewiseconstants withrespecttothe control volumes(or
boxes),whose elements are zeroon0f2z).Note
thattoavoidanondiagonal(and generallynonsymmetric) matrix,b
isused instead ofUbinthe secondtermontheleft-handside of(3.29); see [10].
Here,
thetb
isdefinedas avolumewiseconstantandhas thesame values asUbatverticesofT.
From
the above observation, we see that the error estimator of theFV
solutionUb is proposed bydeterminingY
6S-(ri)
such that(3.30)
B(Y,
v) --B(Ub,v) q-(f,
v)+
(g,V)Oau
’V 6(’gi),
wherethe bilinear formB is definedexactlyas in(3.5).
TheFVsolutionUbis obtainedquite differentlyinthe sense of the abstract setting(2.4).
Nevertheless, the error estimation based on (3.30) is still inthe unifying theme presented
so far. Notealso that there is no direct linkbetween
(3.29)
and(3.30).
Itis preciselyour intention to use the weak residual error estimation. Otherwise, if the boundary integrals/}
were used in (3.30), we would then be forced to perform the estimation volumewise.However,
the theoretical investigationof the estimators wouldcertainlyinvolve the aprioriresults concerningub andyetremainsopen. Equation
(3.30)
is inexactlythe same form as(3.5).
Asaresult, the error indicators and estimators can be calculated inexactlythe samewayasthose of theFEM. Further,the remarks made in
3.1
applyhere.4. Numericalexamples. The numericalexamples presentedinthissectioncorrespond
with those of theprevious subsections. Some exampleswere also considered in the places
cited. Althoughweintendto stress theperformance
(the
effectivityindex)of the respective error estimators, some adaptivecomputationalresults are alsopresented.There aretwodifferenttypesof thecomplementary spaces. Theconformingshape func-tionsof
S-
vanish on boundariesofelements; consequently,theerrorindicators ignore in-terelementjumpsin fluxes. Theshapefunctions for thenonconformingcasearediscontinuousacrosselement boundaries and hence the error indicators will include both the interior errors andthejumpsin, ofcourse, weak form.
Althoughmostapplications require onlythe use ofconforming shapefunctions 1],[9], [25],thereare somecases in which thisapproachwould fail(see Example
4.1)
if theFEorder ofS werenotproperly considered [1], [8].We
shall illustrate both conforming (Examples 4.2,4.3)
and nonconforming(Examples 4.1,4.4,4.5)
error calculations. Generalalgorithmsinimplementingthese error estimators, forequality-type problems,aredetailed in [21 ],[25].
We
shallpresentan algorithm for the variationalinequalitiesinExample4.4.Example4.1. Following
15]
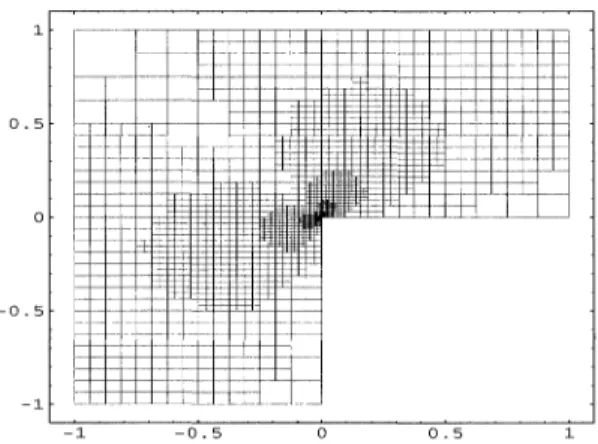
weconsiderLaplace’sequation on anL-shapeddomain: Au=0 in f2 (-1,1) x(-1,1)\(0,1)
x (-1,0),(4.1) Ou
u =0 on0f2D, =g on0f2N,
On
where
OD
{(X, y) X E [0, 1], y0}tO
{(X, y) X 0, y E [--1,0]},
O’N
O"\O’D
and g is defined sothat,inpolarcoordinates, theexactsolutionubecomesu r2/3sin and hence hasapoint singularityattheorigin.For
our computations, bilinear elements are used todefine S.Hence,
bythenature of theproblem,thecomputedsolutionus
is a harmonic function in each element and therefore satisfies(4.1)
on each element. This means that the errors occur purely on the edges ofelements;that is, thecomplementary space
S-
hastobe nonconforming.For
this, weconstruct fouredge midpointbasis functions defined, on the reference elementz*
{(, r/)
I[
_<1,
Irl
_<1},
by(4.2)
lilt
(, r])
(12)(1
r/)/2,
3(, r/)
(12)(1
-t-r/)/2,
2(, 7)
(1
q-)(1
72)/2,
4(, r/)
(1)(1
r/2)/2.
For
the p-versionFEM,
thistypeof construction for thecomplementary spacescanbereadilyextendedtohigh-order shapefunctions. Forinstance, given basis functions defining Soneachelement, one cansimplyaddoneormoreshapefunctionstothe elementby higher-order side mode or internal modeorboth(see [26])for
S.
Inessence, thiscorrespondsto a hierarchical basismethod [2].Of course, theconforming-type shapefunctions can still beused forthis kindofproblem
provided that theoriginalspace Sischosensothat the effects of theboundaryresidualsare negligible. In [8]it wasshownthat forlinearellipticproblemsthe discretization error of odd-orderFEsolutionsismainlyduetothejumps,whilethat of even-orderapproximationsoccurs
principallyinthe interior of the elements,allowingthe jumps across element boundariestobe
neglected. Inlinewith this,eight-node biquadratic FEswereusedin for theapproximation
whiletwofifth-degreepolynomialswereintroduced forthe error estimationinweak residual form.
Figure4.1 is a giveninitial meshon the domain. Theadaptive computation shown in Fig. 4.2 is very similar to those using the code FEARS (finite element adaptive research
solver);
see,e.g., [6]. Our approachhoweveris muchsimplerin terms ofimplementing the error indicators. Dependingon the modelproblem, the location ofsingularity, the quantity ofinterest (displacement, stress,etc.), and the spectralorder of theFE,
different extraction expressions for anauxiliary problemassociatedwith themodelproblem should be chosenaccordinglyforBabugka-Millerindicators; see[6]for more details. Ourerror indicators arenot confinedbythe aboveeffects;namely,oursdonotdependonsingularityandspectralorderand there arenoauxiliaryproblems. In fact,basedonthe ideas in thepresent paper,weareableto
developaverygeneraland robust code whichwecallAdaptC++. So far,wehavesuccessfully
testedourcode forlinearelasticityproblems, mixed-type problems,flows inporousmedia, obstacleproblems,Navier-Stokesequations, and semiconductor device simulationwith
FE,
FV,
andleast-squaresFE
methods.Among
otherthings, one of itsadvantageousfeaturesis thesimplicityinimplementingthe error indicators which disregardinputmodelproblemsand seeonlyaverygeneral settingof linear and bilinear forms andboundaryconditions. Fromtheuser’s
viewpoint,use ofthecode is evensimplerpartlyduetothe refinement scheme and the object-oriented programminglanguage. All numerical datapresentedin this sectionexcept that inExample4.2 wereproduced by AdaptC++.Tables4.1 and 4.2show thatadaptive computationsareclearly superiortouniformmesh reductions.Forinstance, ifatolerance isset to3 %of the relative error(r.e. Illelll the uniform
approach requires over 10 times the degrees offreedom
(DOF)
of the adaptive approach. Also, theeffectivity indices 0 show reliableerrorestimatorsfor both uniform and adaptive approximations.-o.5;
-I -0.5 0 0.5 1
FIG.4.1. Initial meshforExample 4.1.
o.
-o 5
-i -0.5 0.5 1
FIG. 4.2. Adaptivefinalmesh(FEM)forExample4.1.
TABLE4.1
Example 4.1 usinguniformmeshes(FEM).
DOF Illelll r.e. 0 8
-0.284368
0.210 0.732 21 0.196695 0.145 0.801 65 0.128699 0.095 0.821 225 0.082777 0.061 0.830 833 0.052781 0.039 0.835 3201 0.033493 0.025 0.837Example4.2. The discussions in
3.2
are illustratedbythe nonlinearboundary valueproblem
-Au=le
u,
u=u(x,y) (x,y) 6f2=(O, 1)
x(O, 1),(4.3)
u=O on o’3. The weak formulation of
(4.3)
isgivenas(4.4)
(F(u,X), v).=
f.(.xux
-’-blyl)y-)eUv)dxdy
=0 Vv eH(fl)
and we assumethat) e
R1,
whichmeansthat the solutions of(4.4)
formaone-dimensional manifoldM.TABLE4.2
Example4.1 using adaptive meshes(FEM).
DOF 8 21 34 53 78 119 301 469 765 1024 1847 Illelll r.e. 0 0.284368 0.210 0.732 0.196695 0.145 0.801 0.135229 0.100 0.849 0.096849 0.071 0.869 0.072604 0.053 0.877 0.054446 0.040 0.905 0.031254 0.023 0.945 0.024136 0.017 0.957 0.018578 0.013 0.966 0.010675 0.011 0.973 0.011501 0.009 0.980
Weuse auniformmesh,
T,
of 16biquadraticelements on f2. Forthecomputationof the one-dimensional solution manifoldMs
of the discretizedproblem,a continuationprocess
(PITCON[23])
is applied starting from(u,
;s
)
(0, 0), and ouraim is to determine aposterioriestimatesof the error betweenM and
Ms
atallcomputedsolutions (Us, ,ks)Ms.
Inline with
(3.15)
and (3.16),the linearizedproblemat (Us,)s)Ms
is to determine(w,/z)
H
(f2) xA such that(4.5)
fo
[11)x13
x -1I-Wyl)y)seU"wv
+
eU#v]
dxdyfa(UhxVx
+
blhyl)y-)seU"v)dxdy Yv
6Hd(f2),
(4.6)
((w, tz),ts)
=0.As
noted,thets
arechosen as normalizedtangentvectorsonMs
at(us,)s).
Suchtangentvectors are available ateach step of the continuationprocess and hence theequation
(4.6)
involves little additionalcomputationalcost.
For
local solutions each one, Z" ]", of the 16 elements of f2 is divided into m(k
+
1)2
biquadraticsubelements withk 1,4. That meansthaton eachsubelement,rij,16, j 1 m,abubble-shapedfunction
l[rij
(X, y)isconstructed via themappingof theshapefunction
1/t(,
1])
(1
2)(1
1]2defined onthe reference element.
We
thus haveS(ri)
span{Ttij}jm=l
CH(ri)
for each elementri 67"
and henceS-
CHd
(f2)is aconformingFE
subspace. The more subelements areused,the moreaccurateauxiliarycondition(4.6)
becomes and a betterqualityestimator canbe obtained.Theresultingerrorestimates are shown in.Table4.3, where
IwL
denotes thecomputederror normsfor thetwo casesof k. Thecomputationsarevery
cost-effectiv
sinceeachlocalprobleminvolvesonlyafixednumberofdegreesof freedomdependingonthe value of k. The table also showsthat,asexpected,the estimated errorsvarysmoothly alongthe solutionpath
Ms
and show no sudden increases near the limitpoint) 6.804524.As
mentionedearlier, if the natural coordinatesysteminducedbytheparameter spaceA
ischosen,then weexpecttheresultingerror estimates
Itbl
tobecomeunduly largenearthe limitpoint. This isindeed the case as thelast column of Table 4.3 shows.At
the same time, it shouldbenotedthat thecomputationalcostof thetwoapproachesispracticallyidentical.
TABLE4.3
Example4.2 usinguniformmeshes.
9
IIIwl III
IIIw4111
II1111
5.907655 6.193552 6.434373 6.620862 6.745397 6.804524 6.800451 6.740221 6.633252 6.489009 6.328924 0.017914 0.018368 0.019144 0.020640 0.023317 0.027539 0.033461 0.041066 0.050283 0.061065 0.072480 0.019054 0.019562 0.020404 0.021986 0.024787 0.029185 0.035345 0.043255 0.052838 0.064041 0.075894 0.022905 0.024439 0.027792 0.041992 0.159595 0.176171 0.086353 0.069906 0.065171 0.065099 0.067672
Example4.3.
For
mixed-typePDEs,
we considertheforward-backward heatequation(4.7)
xt(x, t)xx(X,
t)f(x,
t)V(x,
t)
f2 (-1,1)
x (0, 1.),b(_+l,t)--0 Yt 6[0,1],
(4.8)
4)
(x,0)
0Yx
6 [0, 1],b(x,
1)=0Yx
6[-1,0].Note
that the equation changes typeasx changes sign in f2. There have been a number ofpapers
addressingthis kindofmixed-typeheatequation;for further references see[5], [28].For
ourcomputations,theexactsolutionb
ischosen asq(x, t) (x2
1)tz[(t
1)2-4x2]
Vx
>O,
[0, 1],4)(x, t)
(x
21)(t
2-4x2)(t
1)2’x
< 0, [0, 1].Denote
theboundary
Of by11
U...U176,171
{(x,
t) x 6 [-1,0],0},
172
{(x,
t) "x -1, 6 [0,1]},173
{(x, t)’x
[-1, 0],1},
174
{(x,
t)’x [0,1],1},
175={(x,t)’x=l, t6[0,1]},
176
{(X,
t) x 6 [0,1],0}.
By
achangeofdependentvariables,II.
(Ul)--
(
e-O’lt
)
bl 2
e-O.ltx
(4.7)
can then beexpressedin symmetricpositiveform(4.9)
Lu
A
lllxq--Aztlt
-t--A0u
f,with
boundary
condition(4.10)
Mu
"=(/z
fl)u
0 (x, t) 6 0f2,TABLE4.4
Example4.3: Boundarymatrices.
F1 0
o)
1-’3 0 1"4 X 0 1"6 X 0(;
o)
x 0-x,
0)
0 0Oot
-x0)
0 0 0 0 0 x 0 TABLE4.5Example4.3 using adaptive meshes.
DOF Illelll r.e. 0 20 1.310 0.804 1.035 72 0.344 0.211 0.985 156 0.155 0.096 0.972 272 0.087 0.054 0.966 420 0.056 0.034 0.963 600 0.039 0.024 0.961 812 0.029 0.017 0.961 where
()
-x -1()()
x(
e-O’ltf
)
Ao=
O.Ix x f=A
-1 0A
0 0 1 0/x,/3,
andMaregiven inTable 4.4.It
canbereadilyshown that the system(4.9),(4.10)
is symmetricpositive.Theadjoint operator L*of
L
isdefinedbyL*v:=(
))Vx-( )vt+(O’lX+lx O1)v.
Now,
the weak formulationcorrespondingto(3.23)
for(4.7),
(4.8)
iscomplete.For
FE
approximationof(3.23),a uniformmesh is introduced onf2 and bilinear elements areused. Onthe otherhand,thebubble-shapedfunctions(4.11)
!/r(:, r/)
:(1
:2)(1/4
:Z)r/(1 -/72)(1/4
r]2)
areusedtodefine
(Sr)2.
Theeffectivityof error estimatesusing(3.24)
isshown inTable4.5.In
view of error equations(3.5)
and(3.24),
the calculation oferror indicators for thepresent example proceedsinasimilarwayasthat ofExample4.1exceptthat we nowhave,in eachelement,a2 x 2systeminducedby
(3.24)
andbythecomplementaryfunctions(4.11)
forthevector-valued functions.
However,
bythenatureof symmetricpositivelinear differentialequations,the bilinear form associated with thesystemis coerciveonlyinthe
L2
norm
instead of in the usualH norm forelliptic problems.Hence,
there is noequivalenceof theenergyTABIF4.6
Example4.4 using adaptive meshes.
DoF
Illelll e. 0 32 0.0223’0.1930
0.890 92 0.0117 0.1015 0.956 345 0.0053 0.0462 0.958 1489 0.0024 0.0211 0.980 5156 0.0012 0.0108 0.986 6833 0.0011 0.0096 0.987normfound inellipticproblems. Ournumericalexperiencehas shown that thequadraticorder of thecomplementarybasis functions used as inExample4.1 gives ratherpessimistic error estimates. Theonly remedy to this difficulty seems tobe to usehigher order
(Sr)
2,
e.g.,(4.11). Note
that this willnotcause morecomputationalcost, infact, thecost isalmost the same aswhen lowerorders are used. Apparently,the aposteriorierroranalysisformixed-typePDEs
remainslargelyto befurther investigated.Example4.4. Ourerror estimatorsfor variationalinequalities
(2.3)
aretestedbythe modelproblemgiven in[4]withthe convexsetK
{v(x,
y) H (f2) v(x, y) >0andv(x, y) g(x, y) on0f2},
where fa (0,7)
x(0, 1) and g is chosen so that we have theexactsolution0, if
(X
-[-1)2
..[_y2
>_ 2,u 1 1 1
ln{ (x
+
1)
2or
22]
otherwise.[(x
+
1)
2+
y2]
2 2
The bilinear and linear forms are definedby
B(u,
v) :=
f
VuVv
dxdy,F(v) :=
f
vdxdy. ALGORITHM.1. Givenaninitialmesh
fah
on2. Constructaconvexset
Ks
withlinearshapefunctionsonf2h.
3.
Use
theGauss-Seidel-SORmethod 18]withthe relaxationparameterandthe rela-tive errorchosentobe 1.2 and 10-6,
respectively,toobtainanapproximatesolutionus
Ks
of the minimizationproblem(3.26).
4. Constructthecomplementaryconvex set
Kc
"={w
S-
C HT-(f2)and w>-Us},
where
S-
isdefined via(4.2).
5.
In
each elementri,usethe method inStep
3 to solve thereducedproblem(3.28)
forY
6Kc’,
which involvesonlyfourequationswithfourunknowns,and then calculatethe error indicator?]i for that element. Calculatethe error estimator for Us. Ifr.e.
> 0.01 then refine allelements withOi _>
0.1tlmax,
t]max max/r]i andgoback toStep
2,otherwisestop.The numerical results are shown in Table 4.6.
Example 4.5.
To
compareFV
andFE
computations, we consideragainthe L-shaped problem(4.1).
For
any particular (1-irregular) mesh, e.g., Fig. 4.3,onf2, theFV
elementapproximationof
(4.1)
istofindut, 6 Ssuch thatOut,
ds
O,
b B b
where the
FE
space Sis defined as inExample4.1.Note
that the test functions defined on the volumesbi
B
areequaltoone.-i -0.5 0 0.5 1
FIG. 4.3. Adaptivefinalmesh(FVEM)forExample4.5. TABLE4.7
Example4.5 usinguniformmeshes(FVEM).
DOF Illelll r.e. 0 8 0.293127 0.217 0.748 21 0.199400 0.147 0.795 65 0.130269 0.096 0.817 225 0.083735 0.062 0.827 833 0.053375 0.039 0.832 TABLE4.8
Example4.5usingadaptive meshes(FVEM).
DOF Illelll r.e. 0 8 0.293127 0.217 0.748 21 0.199400 0.147 0.795 34 0.136928 0.101 0.852 53 0.098177 0.072 0.874 78 0.073441 0.054 0.884 119 0.055017 0.041 0.910 188 0.041540 0.031 0.930 301 0.031497 0.023 0.947 459 0.024512 0.018 0.960 749 0.018927 0.014 0.965 1188 0.014646 0.011 0.973 1801 0.011699 0.009 0.979
CorrespondingtoTables4.1and 4.2, the data of the
FV
computationsare shown inTables 4.7 and 4.8,respectively. The finaladaptivemesh isshown inFig.4.3.Acknowledgment. Theauthor would liketoexpresshisgratitudetothe referees formany
valuablecomments onthepaper.
REFERENCES
S.ADJERIDANDJ.E.FLAHERTY,Second-orderfiniteelement approximations anda posteriori error estimation
fortwo-dimensional parabolic systems,Numer.Math.,53(1988),pp.183-198.
[2] S. ADJERID, J. E. FLAHERTY,ANDY. J. WANG, Aposteriorierrorestimation withfiniteelementmethodsoflines forone-dimensional parabolic systems,Numer.Math., 65(1993), pp. 1-21.
[3] M. AINSWORTHANDJ. T. ODEN, Aunifiedapproachtoaposteriorierrorestimationusing element residual methods,Numer.Math., 65(1993), pp.23-50.
[4] M. AINSWORTH, J. T. ODEN,ANDC. Y.LEE,Localaposteriorierror estimatorsforvariationalinequalities, Numer.Methods Partial Differential Equations, 9(1993), pp.23-33.
[5] A. K.AzIzANDJ.-L. LIU,Aweighted least squares methodforthebackward-forwardheat equation,SIAM J. Numer.Anal., 28(1991),pp. 156-167.
[6] I. BABUKAANDA.MILLER,The post-processingapproachinthefiniteelementmethods,Part1: Calculation
ofdisplacements,stressesand other higher derivativesofthe displacements,Internat. J. Numer.Methods
Engrg.,20(1984),pp. 1085-1109;Part2: Thecalculationofstressintensityfactors, Internat. J. Numer. MethodsEngrg., 20(1984), pp. 1111-1129; Part3: Aposteriorierror estimatesand adaptive mesh
selection,Internat. J.Numer.MethodsEngrg.,20(1984), pp.2311-2324.
[7] I.BABUgKAANDW. C. RHEINBOLDT, Errorestimatesforadaptivefiniteelement computations,SIAM J. Numer. Anal., 15(1978), pp.736-754.
[8] I. BABUKAANDD.Yu,Asymptoticallyexactaposteriorierrorestimatorforbi-quadratic elements, Finite ElementsAnal. Design, 3(1987),pp. 341-354.
[9] EL. BAEHMANN, M. S. SHEPHARD,ANDJ.E.FLAHERTY, Aposteriorierror estimationfortriangular and tetrahedral quadratic elements usinginteriorresiduals,Internat. J. Numer.MethodsEngrg.,34(1992), pp.979-996.
[10] R. E. BANKANDD. J. ROSE, Someerror estimatesfortheboxmethod,SIAMJ.Numer.Anal., 24(1987), pp.777-787.
11] R.E. BANKANDA. WEISEP,, Someaposteriorierrorestimatorsforelliptic partialdifferentialequations,Math. Comp.,44(1985), pp. 283-301.
[12] Z. CAI, Onthefinitevolume elementmethod,Numer.Math., 58(1991), pp.713-735.
13] P.G. CIA,LET,TheFiniteElement MethodforElliptic Problems, North-Holland,NewYork, 1980.
14] L. DEMKOWICZ, J. T. ODEN, W. RACHOWICZ,ANDO.HARDY,Towardauniversalh-p adaptivefiniteelement strategy.Part1.Constrainedapproximation and datastructure,Comput.MethodsAppl.Mech.Engrg.,
77(1989), pp.79-11Z
[15] B. EDMANN, R. ROTZSCH,ANDF. BORNEMANN, KASADENumericalexperiments, TR91-1 Konrad-Zuse-ZentrumBerlin(ZIB),1991.
[16] R. S. FALK, Errorestimatesforthe approximation ofaclass ofvariational inequalities, Math. Comp., 28(1974), pp.963-971.
17] K.O. FmDCHS,Symmetric positivedifferentialequations,Comm.Pure Appl.Math., 11(1958),pp. 333-418. [18] R. GLOWNSKI, J. L. LIONS,ANDR.TP,flMOLIflRES, Numerical AnalysisofVariational Inequalities,
North-Holland, Amsterdam, 1981.
[19] D.W. KELLY,The self-equilibrationofresidualsandcomplementaryaposteriorierror estimatesinthefinite
elementmethod,Internat. J. Numer.MethodsEngrg.,20(1984), pp.1491-1506.
[20] P. LESAINT,Finiteelement methodsforsymmetrichyperbolic equations,Numer.Math.,21(1973),pp. 244-255. [21] J.-L. LIUANDW. C. RHEINBOLDT,Aposteriorifiniteelementerror estimatorsforindefiniteellipticboundary
valueproblems, Numer. Funct.Anal. Optim., 15(1994), pp.335-356.
[22] J.T. ODEN, L. DEMKOWICZ, W. RACHOWICZ,ANDT. A. WESTERMANN,Towardauniversalh-padaptivefinite
elementstrategy,Part2.Aposteriorierrorestimation,Comput.MethodsAppl.Mech.Engrg.,77(1989), pp. 113-180.
[23] W. C. RHEINBOLDT,Numerical AnalysisofParametrizedNonlinear Equations,J.Wiley&Sons,NewYork, 1986.
[24] Onthe computationofmulti-dimensional solutionmanifoldsofparametrized equations,Numer.Math., 53(1988), pp.165-181.
[25] W.C.RHEINBOLDTANDJ.-L.LIu,Aposteriorierrorestimatesforparametrizednonlinearequations, in Nonlin-earComputationalMechanics,EWriggers andW.Wagner,eds., Springer-Verlag, Berlin, 1991, pp. 31-46. [26] B.A.SA3OANDI.BABUKA,FiniteElement Analysis, Wiley,NewYork, 1991.
[27] T. TSUCHIYA, APrioriandAPosterioriErrorEstimatesofFiniteElementSolutionsofParametrizedNonlinear Equations, Ph.D. thesis,Dept.ofMath., Univ. ofMaryland, CollegePark,MD,1990.
[28] V.VANA3AANDR.B. KELLOGG,Iterativemethodsforaforward-backwardheat equation,SIAMJ.Numer. Anal., 27(1990), pp.622-635.
[29] O.C.ZIENKIEWICZANDJ. Z.ZHU,Asimpleerror estimatorand adaptiveprocedureforpractical engineering analysis,Internat. J. Numer.MethodsEngrg.,24(1987), pp.337-357.