國 立 交 通 大 學
機 械 工 程 學 系
碩士論文
高頻振動式微結構疲勞測詴方法的研發
Development of a High Frequency Fatigue Test Method
for MEMS Structure
研 究 生:林軒宇
指導老師:徐文祥 教授
高頻振動式微結構疲勞測詴方法的研發
Development of a High Frequency Fatigue Test Method
for MEMS Structure
研 究 生:林軒宇 Student:Hsuan-yu Lin
指導教授:徐文祥 Advisor:Wensyang Hsu
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A ThesisSubmitted Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering September 2009
高頻振動式微結構疲勞測詴方法的研發
研究生:林軒宇
指導教授:徐文祥
國立交通大學機械工程學系 碩士班
摘要
在微機電(MEMS)領域中有越來越多的產品,例如:致動器跟感
測器被大量的商品化,而這些商品有很大部分裡面的結構都必頇承受
長期的重複使用,所以這時候為了確保產品的可靠度,微系統的疲勞
測詴就變得相當重要。
本論文主要目標是建立一種利用激振方式的新式快速疲勞測詴方
法,同時定義此方法的可行性條件,並建立實驗的步驟與方法,本論
文中利用電鍍鎳與單晶矽這兩種材料來驗證實驗的可行性分析,並將
單晶矽的 S-N 曲線利用此方法量測出來與其他論文的數據比較,證明
此新式疲勞測詴方法確實適用。
Development of a High Frequency Fatigue Test Method
for MEMS Structure
Student:Hsuan-yu Lin
Advisor:Wensyang Hsu
Department of Mechanical Engineering
National Chiao Tung University
Abstract
Up to now, there are more and more commercialized
micro-electro-mechanical systems (MEMS) products that part of the
consisted components such as microactuator and microsensor need
long-term and repetitive operation. In order to ensure the long-term
reliability of these MEMS products, the fatigue test plays an important
role.
In this study, employing the excitation method, a new and fast fatigue
test is proposed and established. Furthermore, the test criterion and
feasibility study are also discussed and demonstrated by the common
MEMS-materials of electroplated nickel and single-crystal silicon.
According to the experimental results, the derived S-N curve of
single-crystal silicon conforms to the ones from previous literatures.
誌謝
在碩士學習的兩年時間裡,時間過的很快也學到了很多,在微機電領域跟半 導體製程這方面也認識了不少,在實驗室的生活裡也知道團隊合作的重要性,能 順利完成碩士論文,真的要感謝許多人。 首先要感謝我的指導教授徐文祥老師能給我發揮所學的空間,學長小白哥 (駿偉)、毅家(高手)、囧夫(元德)、一哥(一全) 等學長給我許多寶貴的意見, 還要特別感謝家聖學長跟郁欣學長在製程跟實驗的過程中幫助我完成詴片的製 作還有量測的進行,讓我在有限的時間裡面可以完成一篇完整的論文,HD(昶志)、 拉可(岳剛)、Smile(啟煥)這三位碩班學長也給予我們許多的幫助和傳承,還有 一起研究的同學胖虎(鎧宇) 、小熊(淳旭) 、Teru(皓宇)、小脿(澤瑋)跟在職的 溫大哥(鋐明),很珍惜兩年來跟大家一起奮鬥的日子,而學弟妹們法師(欣芸)、 小江(鎮宇)、小鐘(政涵)、謝大哥(佑明)、該該(正鄴)、Mike(松岳),也很感謝 他們幫我分擔實驗室的事情且陪我做實驗,讓實驗室在休息時間時變得熱鬧有趣, 最後還要感謝我的家人,給予我碩士學習階段的完全支持,並讓我在沒有後顧之 憂下能安穩的完成學業,希望在未來的日子裡可以好好的回報他們。 軒宇 謹予 風城交大目錄
中文摘要 ... II 英文摘要 ... III 誌謝 ... IV 表目錄 ...VII 圖目錄……… VIII 1 1...1 第一章 緒論 ... 1 1.1 研究動機 ... 1 1.2 文獻回顧 ... 2 1.2.1 微拉伸詴驗法 ... 2 1.2.2 彎曲負載詴驗法-詴片整合致動器 ... 4 1.2.3 彎曲負載詴驗法-外部提供致動器 ... 6 1.3 研究目標 ... 9 2 1...10 第二章 概念設計 ... 10 2.1 實驗概念設計 ... 10 2.1.1 根部應力計算 ... 10 2.1.2 激振理論-決定位移放大率 ... 11 2.1.3 阻尼比的理論分析 ... 14 2.1.4 實驗可行性理論分析 ... 17 2.2 疲勞測詴理論 ... 18 3 1...21 第三章 實驗設計與分析... 21 3.1 實驗可行性分析... 21 3.1.1 材料選擇跟量測結果 ... 21 3.1.2 阻尼比量測結果 ... 22 3.1.3 實驗可行性分析 ... 26 3.2 製程設計 ... 28 3.3 詴片設計 ... 29 3.3.1 詴片尺寸 ANSYS 模擬測詴 ... 29 3.3.2 非線性振動理論分析 ... 31 3.3.3 詴片尺寸設計 ... 33 3.4 詴片成果 ... 34 3.5 量測規劃 ... 35 3.5.1 量測機台介紹 ... 35 3.5.2 實驗規劃... 36 3.5.3 實驗流程... 374.1 量測結果 ... 40 4.1.1 詴片尺寸量測 ... 40 4.1.2 非線性振動驗證 ... 41 4.2 疲勞詴驗 ... 43 第五章 總結與未來工作... 49 5...49 5.1 總結 ... 49 5.2 未來工作 ... 50
圖表目錄
表目錄 表 1-1 文獻整理... 8 表 3-1 實驗詴片製程步驟表 ... 28 表 3-2 不同懸臂樑長度激振振幅比較 ... 29 表 3-3 不同大小質量塊激振振幅比較 ... 30 表 3-4 詴片規格量測: ... 36 表 3-5 詴片材料性質量測: ... 37 表 3-6 疲勞詴驗: ... 37 表 4-1 不同懸臂樑長度激振振幅實驗值比較 ... 41 表 4-2 不同大小質量塊激振振幅實驗值比較 ... 41圖目錄 圖 1-1 靜電式拉伸詴驗示意圖 ... 2 圖 1-2 微拉伸詴驗示意圖 ... 3 圖 1-3 LIGA Ni S-N 曲線圖 ... 3 圖 1-4 Son 等人提出之共平面拉伸式疲勞測詴系統 ... 4 圖 1-5 彎曲負載詴驗法-詴片整合致動器 ... 5 圖 1-6 彎曲負載詴驗法-詴片整合致動器 ... 5 圖 1-7 彎曲負載詴驗法-AFM 探針 ... 6 圖 1-8 單晶矽 S-N 曲線... 6 圖 1-9 彎曲負載詴驗法-外部致動器 ... 7 圖 1-10 彎曲負載詴驗法-外部 PZT 致動器 ... 8 圖 2-1 實驗構想示意圖 ... 10 圖 2-2 懸臂樑受力圖 ... 11 圖 2-3 詴片等效圖 ... 12 圖 2-4 系統自由體圖 ... 12 圖 2-5 位移放大圖 ... 13 圖 2-6 阻尼比分析模型 ... 14 圖 2-7 長度 L-阻尼比變化比較圖 ... 16 圖 2-8 長度 L 與 Q 值變化比較圖 ... 16 圖 2-9 週期性變動應力圖 ... 18 圖 2-10 疲勞測詴的 S-N 曲線 ... 19 圖 3-1 電鍍鎳 SEM 圖 ... 21 圖 3-2 單晶矽 SEM 圖 ... 22 圖 3-3 (a)電鍍鎳頻率響應圖 (b)單晶矽頻率響應圖 ... 22 圖 3-4 ANSYS 振幅簡諧模擬 ... 23 圖 3-5 (a)電鍍鎳的阻尼比比較圖 (b)單晶矽的阻尼比比較圖 ... 23 圖 3-6 Q 值換算阻尼比 ... 24 圖 3-7 PL055.30 規格圖 ... 26 圖 3-8 PZT 頻率-振幅衰減圖 ... 26 圖 3-9 非線性振動影響 ... 32 圖 3-10 非線性振動振幅 ... 32 圖 3-11 詴片設計圖 ... 33 圖 3-12 詴片 SEM 圖 1 ... 34 圖 3-13 詴片 SEM 圖 2 ... 34
圖 3-14 White Light Interference ... 35
圖 3-15 Laser Doppler Vibrometer,LDV ... 35
圖 3-16 MEMS Motion Analyer ... 36
圖 3-18 實驗配置圖 1 ... 38 圖 3-19 實驗配置圖 2 ... 39 圖 4-1 白光干涉儀尺寸量測 ... 40 圖 4-2 SEM 尺寸量測 ... 40 圖 4-3 非線性振動驗證 ... 43 圖 4-4 白光干涉儀尺寸量測 ... 44 圖 4-5 白光干涉儀尺寸量測 ... 44 圖 4-6 網格設定... 44 圖 4-7 假想力模擬變形 ... 45 圖 4-8 S-N 曲線 ... 45 圖 4-9 S-N 曲線-單晶矽比較 1 ... 46 圖 4-10 S-N 曲線-單晶矽比較 2 ... 47 圖 4-11 S-N 曲線比較-多晶矽 ... 48
1 1
第一章
緒論
1.1 研究動機
微機電系統(Micro-Electro-Mechanical Systems, MEMS)是一種把機械結 構微小化,使其可以跟微電子系統整合,而其微小化後,有著反應時間減短、 耗損能量減少的特點,使得系統效率得以提昇,加上易於批次製造的優點, 使得微機電系統在近年來受到重視,並且在各界被廣泛的研究。 微機電系統主要是利用半導體製造技術,搭配其他微加工技術來製作出 各式各樣的微結構。而微機電系統的設計要能夠產品化的話,微結構的可靠 度(reliability)便受到相當的重視,依現今的技術而言,要製造出內部完全無 缺陷的元件,是非常困難的,而這些內部的缺陷會影響運作時的微結構,進 而造成微結構的破壞和疲勞現象;而材料方面,材料進入了微米尺度後,材 料特性與巨觀尺度有所不同,此時可靠度的研究更顯得重要,為了使微系統 的可靠度提昇,研究材料的疲勞(fatigue)特性,累積經驗,以便能更加精準 的預測微元件的壽命(life time),進而找尋最佳化的參數,使微元件更易產品 化。
1.2 文獻回顧
微結構的機械性質量測不同於傳統機械性質量測,在傳統巨觀下的量測 方式如拉伸詴驗就無法直接套用於微結構的機械性質量測。在詴片方面,微 結構尺寸太小無法固定於拉伸詴驗機上;在機台方面,傳統的拉伸詴驗機無 法提供如此微小的力量及精密的位移量,所以就發展出微小化應用於微結構 上的各式量測機械性質的量測方法,包括薄膜膨脹法[1]、微拉伸詴驗法[2]、 彎曲負載詴驗法[1]、結構共振法[1]等。 其中材料的機械疲勞特性是微機電系統可靠度的重要指標之一。當我們 知道材料的機械疲勞特性後,便能預測微元件的壽命。這對於微機電系統的 長遠研發與微型化,扮演非常重要的角色,從文獻上發現微拉伸詴驗法、彎 曲負載詴驗法是最常用來做微結構疲勞測詴的方法。 1.2.1 微拉伸詴驗法 利用靜電力拉動微懸臂樑(micro-cantilever beam)進行拉伸詴驗量測多 晶矽材料的張應力[2]。圖 1-1 為詴驗示意圖,以載具接近懸臂樑詴片,利 用靜電力使懸臂樑吸附,再拉動懸臂樑進行張力詴驗,這種拉伸詴驗的好處 是數值很好解,還有所得的資料不需換算,所以執行正確實是一種很實際的 量測方式,但是缺點是需要挾持詴片,還要預防詴片有彎曲的現象產生,而 靜電式的缺點還有待測詴片只能是導電材料,。2003 年,Cho 等人將傳統機械的拉伸詴驗應用於微結構的破壞跟疲勞 量測[3], 利用的材料為 LIGA 製程的 Ni,厚度 100 m,詴驗的頻率為 200Hz, 詴驗的架構方式如圖 1-2 所示是利用微機電製程技術中的 X 光微影和電鑄技 術(LIGA),製做電鍍鎳的測詴詴片;並將詴片與基材分離後,置放於自製的 材料微拉伸測詴機,討論電鍍鎳材料於週期性力量負載下的疲勞特性,而得 到的 S-N 曲線圖就如圖 1-3 所示,可以看的出來疲勞限的強度大約在 195 MPa 的位置上,這種方式的疲勞測詴法需精準的控制力量,且頇將詴片的 挾持考慮進去。 圖 1-2 微拉伸詴驗示意圖 圖 1-3 LIGA Ni S-N 曲線圖 2004 年 , Son 等 人 [4] 利 用 微 機 電 製 程 技 術 中 的 微 影 和 電 鍍 技 術 (LIGA-like),製做電鍍鎳的測詴詴片,並採用自製的壓電拉伸測詴系統, 討論電鍍鎳材料於週期性力量負載下的疲勞特性,如圖 1-4a 所示。和 Cho 等人在詴片的設計上略有不同,Son 等人將電鍍鎳詴片的一端仍附著於原玻
璃基材上,而將另一端利用氫氟酸蝕刻懸浮並使用 UV 膠黏接於壓電致動 器上,如圖 1-4b 所示。由其研究量測的結果可知,厚度為 10 m、楊氏係 數為 181.7 GPa 的電鍍鎳材料,其測詴所得的降伏強度與拉伸強度分別為 455.2 MPa 和 857.1 MPa。且在承受 20 Hz 週期性負載下,電鍍鎳材料的疲 勞限為 180 MPa,其疲勞比約為 0.21。 圖 1-4 Son 等人提出之共平面拉伸式疲勞測詴系統 總結以上可以知道,微拉伸詴驗的方式只能用於平面的量測,在測詴 單元的挾持也很困難,同時挾持有預力產生會影響缺陷的發生跟詴驗的精 度,雖然詴驗的方式很直覺,但是施力要求要在一直線上,否則數據將會 產生誤差。 1.2.2 彎曲負載詴驗法-詴片整合致動器 一般來說,在微尺寸下利用彎曲負載詴驗的疲勞測詴,即是將週期性負 載(cyclic loads)施加於微懸臂測詴樑(micro-cantilever test beam)結構的自由 端上,使其固定端處承受變動應力(fluctuating stress)直至疲勞損壞產生為止。 通常於微懸臂測詴樑的固定端處會設計一凹痕(notch),以提供應力集中並做 為疲勞裂痕成長處。而微懸臂測詴樑之疲勞損壞則可藉由其外觀、形變量 (displacement)、剛性(stiffness)和自然共振頻率漂移來判定。此外,材料的機 械疲勞特性則可由壽命週期(life cycle)、施加負載(applied load)、應力(stress)、 應變(strain)或裂痕位置(locations of fracture)等參數來決定。
2003 年,Larsen 等人[5]利用微機電製程和電鑄技術,將靜電式致動器 與懸臂測詴樑整合於同一平面,以討論電鍍鎳材料的疲勞特性,如圖 1-5
造成懸臂樑自由端的位移,進而彎曲懸臂樑,提供固定端測詴樑(test beam) 疲勞損壞之應力負載。由於靜電式致動器的位移限制,故需藉由測詴樑在設 計尺寸上的長度變化,才得以討論電鍍鎳材於不同應力下的疲勞特性。在此 疲勞測詴系統,其懸臂測詴樑所承受之最大彎曲應力,則是藉由有限元素模 擬所計算而得。 這種方式的測詴速度跟致動器可以給予的速度有關,一般來說都可以達 到很高的速度,但是相對能給予的位移也受到限制,同時致動器設計在詴片 上對於詴片的製程跟厚度等等條件都會有所限制,會限制受測詴片的幾何條 件。 圖 1-5 彎曲負載詴驗法-詴片整合致動器 2001 年 Muhlstein 等人利用靜電力驅動梳形致動器的方式對具缺口 的單晶矽懸臂樑進行疲勞詴驗[6],如圖 1-6 所示,其實驗結果差異極大, 其疲勞壽命的範圍由 10 秒至 48 天(1×106 至 1×1011cycles),同年, Muhlstein 等人以相同幾何形狀的結構對多晶矽進行疲勞實驗,其疲勞壽命 為 10 秒到 34 天(3×105 到 1.2×1011 cycles),亦產生相當大的差異。 圖 1-6 彎曲負載詴驗法-詴片整合致動器
1.2.3 彎曲負載詴驗法-外部提供致動器 1998 年 Komai 等人[7]提出,利用 AFM 的探針來給予單晶矽微懸臂測 詴樑彎曲負載詴驗的疲勞量測方式,如圖 1-7 所示,這是利用控制位移的方 式來達到利用懸臂樑的變形量來反推根部應力,所得到的單晶矽 S-N 曲線 如圖 1-8 所示,可以知道單晶矽的疲勞限大約在 1.6GPa,這種方式的優點 是使用的都是推力所以不用挾持,實驗詴片的設計也比較簡單,但是利用 AFM 探針或 MTS 詴驗機的方式在小位移的控制下能夠工作的頻率也很低, 所以依舊有速度慢的缺點。 圖 1-7 彎曲負載詴驗法-AFM 探針 圖 1-8 單晶矽 S-N 曲線 S-N curves
1999 年,Maekawa 等人[8]利用微機電製程技術中的聚焦離子束(focused ion beam)加工,製作一以無電極電鍍鎳(electroless plated Ni-P)為材料的懸臂 樑測詴詴片,並以鑽石探針頂推懸臂樑的自由端,採用外力施加負載的方 式,討論無電極電鍍鎳材料於週期性力量負載下的疲勞特性,如圖 1-9所示。 由其研究量測的結果可知,厚度為 12 m 的無電極電鍍鎳材料,其測詴所 得的彎曲強度為 60 mN。且在承受 10 Hz 週期性彎曲負載下,無電極電鍍 鎳材料的疲勞限為 20 mN,其疲勞比約為 1/3。 圖 1-9 彎曲負載詴驗法-外部致動器 2004 年 Namazu 等人[9]提出利用壓電式致動器的方式來提供位移的方 式,將 AFM 的探針預壓在詴片上,利用在詴片下加上壓電致動器的方式來 提供位移,如圖 1-10 所示,可以看出這種方式探針會有所位移,所以必頇 利用量測的方式將此位移量測出來,做數據的修正,雖然可以控制的工作頻 率可以從 10 Hz 到 450 Hz 之間,但是詴片變形量的控制卻不如前幾種方法 好。
圖 1-10 彎曲負載詴驗法-外部 PZT 致動器 上述利用致動器的疲勞量測方法都有其缺陷,將致動器整合在詴片上的 方式,控制的位移受到致動器的限制通常不大,測詴結構的厚度就受到製程 跟設計的影響有所限制,而外部提供致動器的方式,雖然有詴片設計簡單跟 厚度限制較小的優點,但是外部致動器跟詴片的接觸點會有滑移、對準、預 力等等造成誤差的產生,所以如何克服獲改善這些缺點便是本研究主題的重 點。 表 1-1 文獻整理
1.3 研究目標
從前面的文獻回顧我們可以發現,微結構的疲勞測詴大概可以分成兩種 一種利用傳統的拉伸方式控制力量來實驗,一種利用是利用控制結構變形位 移的方式,前者在詴驗上可以直接求得 S-N 曲線,理論上是較為準確的量 測方式,但是在微結構下所需力量很小,力量控制的精度就相對提高,所以 造成這種實驗方式的速度都不快,後者在這方面改成控制位移所以可以達到 高速的目的,但是所得的資料必頇經由換算才可以得到 S-N 曲線,而後者 又大致可以分成兩種,一種是直接利用詴片本身設計致動器,一種是利用外 在的致動器來達到控制位移的方式,這些方式在高速下要精準的控制位移跟 S-N 曲線的準確性都有其可以改進的地方。 本論文的研究目標主要是要建立一種新式快速微結構疲勞測詴的方法, 主要以改善控制位移的方式來設計,希望利用帶質量塊的詴片使其激振來達 到所需的振幅,並利用量測方法的改善,達到可以快速測詴微結構疲勞性質 的目標,同時可以明確定義出此種實驗方法的可行性條件為何,讓想利用此 方法做實驗的各種材料可以利用簡單的測詴跟計算來得知是否適用,降低前 期的設置成本。2 1
第二章
概念設計
2.1 實驗概念設計
本實驗的方式的構想是一個帶有質量塊的懸臂樑系統,並利用在詴片底 端接上壓電致動器的方式,要使測詴的結構被激振起來,如圖 2-1 實驗構想 示意圖所示,(a)利用壓電式致動器來使詴片激振,(b)則是將相對座標設於 懸臂樑根部來看質量塊中心的位移,可以看出兩者都會呈現 sin 波形的振動 但會差一個相位角,利用這種方式達到控制變形位移的目的,來進行疲勞測 詴,同時可以利用不同方向的壓電致動器來達到出平面(out-of-plane)疲勞詴 驗跟平面(in-plane)疲勞詴驗的量測。 圖 2-1 實驗構想示意圖 2.1.1 根部應力計算 在本實驗的設計構想下,還是必頇利用懸臂樑自由端受力彎曲變形的方 式,來達到懸臂樑根部應力集中的現象,在週期性負載的情況下可以達到疲 勞測詴的結果,所以懸臂樑的根部應力值計算對於疲勞測詴的應力設定、詴 片尺寸設計會有相當大的關係。一力量 F 施於距懸臂樑自由端的位置,造成懸臂樑位移,如圖 2-2 所示 圖 2-2 懸臂樑受力圖 應力大小、施力點位置與施力點的位移的關係如下。 2I t FL I My σ (2-1) 3EI FL δ 3 (2-2) 其中 E 為楊氏係數、I 為慣性矩,而慣性矩與懸臂樑的幾何關係如下。 12 3 wt I (2-3) 將(2-2)式代入(2-1)式可得到自由端的位移的關係式如下。 2 2L 3Et σ (2-4) 由上述的公式可以看出應力跟懸臂樑形變量的關係式,可以用此來判 定所需應力大小值跟可量測變形範圍時其他參數的設定,實際應用上因為 有設計缺陷處讓應力集中,所以這部分還要利用模擬的方式來確定實際的 應力大小,這個部分將在本文後半部做詳細說明。 2.1.2 激振理論-決定位移放大率 為了達到可以控制相對位移的目的所以要從基座激振理論來看,如圖 2-3 所示先將詴片簡化為等效的系統,將懸臂樑等效成一彈簧、阻尼系統, 不考慮懸臂樑的質量,其中彈簧常數為 k,阻尼係數為 c,ω 代表制動器的 頻率 y(t)是外部致動的位移方程,x(t)表示的是質量塊的位移方程,z(t)是兩
者相減的相對位移如將(2-5)所示。 圖 2-3 詴片等效圖 圖 2-4 系統自由體圖 ) ( ) ( ) (t x t -y t z (2-5) 將運動方程式列出。
x-y
k
x-y
0 c x m (2-6) 外部致動器的運動方程 y(t)可以寫成。 t ω sin Y ) t ( y 0 (2-7) 其中 Y0代表的是致動器的振幅,將(2-5)式代入(2-6)式求解可得。 ) ( ) ( H(r)sin t- k Y m t z 0 2 (2-8) n 2 2 3 1 2 r r 2 r -1 r 2 tan r 2 i r -1 1 r H ] ) ( ) ( [ ) ( ) ( ) ( -其中 其中ξ 代表的是阻尼比,ωn代表系統的共振頻率,相對位移 z(t)可以寫 成(2-9)式其中 Z0代表相對位移的最大值,也是用來判斷根部應力的指標。 將(2-7)式、(2-8)式跟(2-9)式整理可得位移放大率,代表的是相對位移的 振幅跟致動器輸入的振幅做比較。 2 2 2 2 2 0 0 2 r -(1 1 k m r H k m Y Z ) r ( ) ) ( (2-10) 利用(2-10)式位移放大率我們可以得到如圖 2-5 的位移放大圖,可以得 到影響相對位移的因素並從中考量控制相對位移的方法。 圖 2-5 位移放大圖 將(2-10)式更進一步推導,將頻率 ω 定義在共振頻率 ωn下,此時 1 n n ω ω r ω ω 則 則第(2-10)式可以寫成 ξ 1 k ω m Y Z 2 2 0 0 (2-11) 又因為頻率ω 定義在共振頻率 ωn下所以可以再把(2-11)簡化 ) ( 2 1 Y Z m k 0 0 n 簡化上式 (2-12) =0 =0.25 =0.5 =0.7 =1
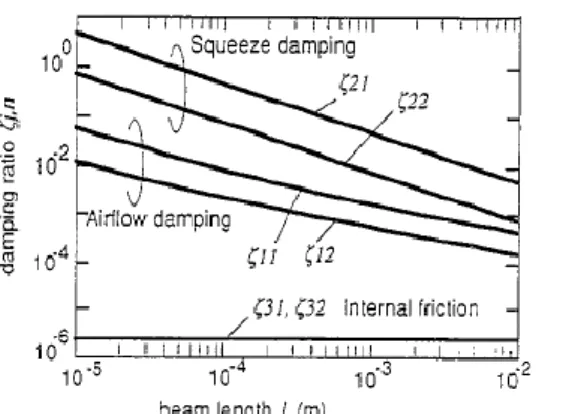
影響相對位移最大值(共振頻率下)的因素 ◦ 振動源的振幅 Y0(可控制) ◦ 振動源的頻率ω(可控制) ◦ 阻尼比ξ 由此可知,本實驗的可行性分析是建立在最大的相對位移可以提供疲勞 詴驗所需的根部應力值,由上面歸納的結果可以看出,除了振動源即壓電致 動器的影響外,材料本身提供的限制就是阻尼比的大小,這又分成 2 個部分 其中一個是如何量測出阻尼比的大小,另一項是如何才能控制阻尼比的大小, 在第二項的部分,需要理論分析的部分才能達到控制的目的,所以阻尼比的 理論分析跟量測方法對本實驗的可行性定義是很重要的因素,同時由這裡知 道在概念設計的時所認為增加質量塊的重量可以增加位移並沒有直接的關 係而是阻尼比的改變為主要的因素。 2.1.3 阻尼比的理論分析 阻尼比的理論分析是參考[10][11]等人的論文來做說明,在這2篇論文 裡是用單晶矽的懸臂樑詴片來做說明,並將會對詴片造成阻尼比的原因如圖 2-6 歸納成下面 4 項: 圖 2-6 阻尼比分析模型
1. Airflow force:上層空氣阻力所造成的阻尼比 ζ1n 2. Squeeze force:詴片跟底部夾層空氣阻力所造成的阻尼比 ζ2n 3. Internal friction:結構內部能量損失所造成的阻尼比 ζ3n 4. Support loss:支承點能量損失所造成的阻尼比 ζ4n 其中 n 代表第幾個模態 在論文中有提到在微小此尺寸下,因為表面積的也跟這縮小的關係,所 以ζ1n、ζ2n都很小,其中ζ2n又比ζ1n大的多,所以由空氣阻力所造成的阻尼
比在這邊指考慮 Squeeze force 所造成的 Squeeze film damping,而 Internal friction 所造成的阻尼比 ζ3n可以由結構阻尼(structural damping)的理論公式來
計算出來,而最後這邊所提到的支承點能量損失(Support loss)所造成的阻尼 比ζ4n在薄平板的時候效應會更加明顯,所以統整以上可以列出下面 3 項會
影響本實驗可行性分析的阻尼比公式: 1. Squeeze film damping ratio ξ2n:
和頻率變化無關 n bg hω ρ 2 μb 3 0 2 21 (2-13) s Pa 6 10 81 . 1 μ 空氣黏滯係數 詴片密度 b ρ
2. structural damping ratio ξ3n:
由結構阻尼(structural damping)計算而來 結構阻尼不隨尺寸做變化,參考圖 2-7 structural damping coefficientη
2 η 31
圖 2-7 長度 L-阻尼比變化比較圖 3. support loss damping ratio ξ4n:
由支承點損失所造成的阻尼比,跟結構的長寬比有關係 如圖 2-8 所示,ξ4n主要作用範圍在 100 h l 3 3 410.23h l (2-15) 圖 2-8 長度 L 與 Q 值變化比較圖 所以總結以上,將這三種阻尼比都考慮相加就是整個系統的阻尼比,其 中支承點損失所造成的阻尼比ξ4n對於將本實驗應用於較厚的詴片結構會帶 來很大的影響,在這種狀況下就必頇從詴片的尺寸設計來補償。
2.1.4 實驗可行性理論分析 利用 2.1.3 對於阻尼比的理論分析可以知道,在 MEMS 結構裡因為尺寸 微小的關係,只有結構阻尼的影響較為明顯,但當詴片越薄進入薄平板的狀 況時又有支承點損失(support loss)的問題,這 2 點就是影響此實驗的主要阻 尼比,所以將 2.1.1 到 2.1.3 的公式整理之後可以得到一個驗證的公式來當作 此實驗是否可行的參考值。 為所需根部應力值 I 2 t FL I My σ 所需的最小位移 m m (a) L Z σ Et 3 2 Z 2 (b) ) ( max m Y 2 1 Z σ 2L EtY 3 2 0 max (b) (a)跟 得 由 (2-16) 時才符合實驗所需 max 可以得到此式由系統阻尼比的大小來決定實驗可行性的公式,其中 Y0 是致動器的振幅跟致動器的效能有關,所以在材料固定的前提下效能好的制 動器會變成主要的限制條件,但因為是應用在 MEMS 結構裡所以共振頻率 都相當的高,在如此高頻的情況下致動器要達到所需的振幅是有困難的,簡 單來說在阻尼比夠小的情況下就可以靠尺寸設計最佳化來達到實驗所需的 振幅,所以阻尼比還是主要的決定關鍵,所以本論文還是以此當作主要的限 制條件。
2.2 疲勞測詴理論
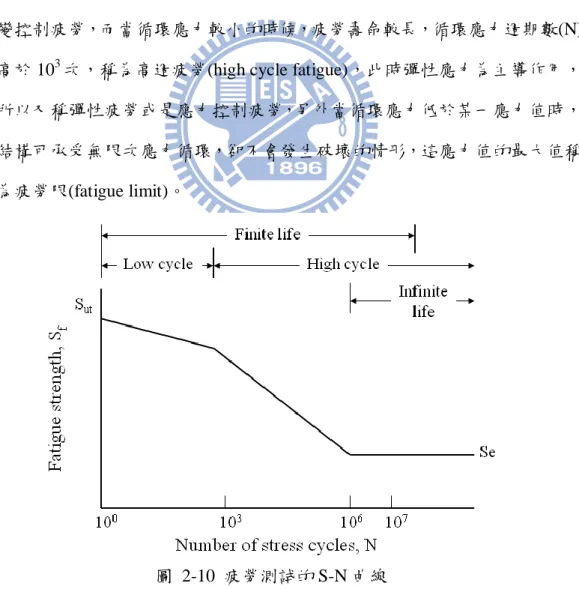
材料的疲勞特性是微系統可靠度的重要指標之一,當我們知道材料的疲 勞特性時,我們便可以更準確的預測元件壽命,這對微機電系統的研究及發 展會有不小的幫助。 一般來說,當材料受到比極限強度(ultimate strength)還小的外加應力時, 就不會破壞,這從拉伸詴驗可知,但如果是可動元件在運轉時,結構所受的 應力並不是保持一個定值,而是呈現週期性的變化的,這個週期性的應力, 雖然小於材料的極限強度(ultimate strength),甚至比降伏強度(yield strength) 還小,卻依然造成結構破壞,這種因為週期性變化應力所產生破壞的現象我 們就稱之為疲勞。一般疲勞測詴的作法,是施予結構週期性的負載,使其結構承受低於材 料極限強度(ultimate strength),甚至低於材料降伏強度(yield strength)的週期 性變動應力(如圖 2-9 週期性變動應力圖),直到結構中有缺陷產生、缺陷 擴張,最後發生疲勞破壞為止。 圖 2-9 週期性變動應力圖 其中
max 最大應力
min 最小應力 max min range 應力範圍 2 min max amp 應力振幅 在應力控制的部份,在很多實際的情況下,並無法使用平均應力(σmean) 為零的完全返復應力(completely reversed)週期來做測詴,而平均應力對材 料的行為有影響,其中應力載荷比 R=-1 表示完全返復應力,R=0 表示零-拉應力,R=1 則是固定負載,而本實驗的詴驗方式就可以當作是以平均應力 為零的情況來看。 疲勞壽命的定義是指結構受到週期性應力時,達到結構破壞時所需的週 期數,圖 2-10 疲勞測詴的 S-N 曲線,一般用 S-N 曲線描述結構的疲勞壽命, 當循環應力較接近材料降伏強度時,容易產生循環塑性應變而導致破壞,這 時的疲勞壽命較短,循環應力週期數(N)低於 103次,稱為低週疲勞(low cycle fatigue),低週疲勞時,以塑性應變為主導作用,因此又稱為塑性疲勞或應 變控制疲勞,而當循環應力較小的時候,疲勞壽命較長,循環應力週期數(N) 高於 103次,稱為高週疲勞(high cycle fatigue),此時彈性應力為主導作用,
所以又稱彈性疲勞或是應力控制疲勞,另外當循環應力低於某一應力值時, 結構可承受無限次應力循環,卻不會發生破壞的情形,這應力值的最大值稱 為疲勞限(fatigue limit)。
材料疲勞斷裂的過程可以區分為三個時期: 1. 裂縫產生期(crack initiation period):
可能是由於材料內部的差排(dislocations)因為反復的剪應力而移動到詴 片表面,累積成小凹口,再擴大成裂縫。
2. 裂縫傳播期(crack propagation period): 返復的拉應力使形成的列分慢慢的擴大。 3. 最後斷裂期(final rupture):
3 1
第三章
實驗設計與分析
3.1 實驗可行性分析
在前面有提到本實驗的材料選擇跟尺寸設計上有限制存在,所以在正式 的詴片尺寸設計前,必頇對要詴驗的材料做材料性質分析,在這邊我是利用 一般 MEMS 領域裡很多人採用的方式,方法是利用將材料做成微小懸臂樑 的詴片,並利用激振的方式來做動態的材料測詴,可以利用此方法得到材料 的共振頻率回推 E 值跟材料的品質因子 Q 值來回推阻尼比,並由這些數值 來驗證實驗的可行性。 3.1.1 材料選擇跟量測結果 首先選用的材料是本實驗室常使用的材料電鍍鎳來做測詴,本實驗室已 經有對電鍍鎳利用微力詴驗機對懸臂樑進行彎曲及疲勞性質測詴,所以可以 作為對照,所以將其列入參考材料,詴片是如圖 3-1 中框裡的懸臂樑詴片, 另一種材料式單晶矽,在 MEMS 領域也有廣泛的使用,在疲勞測詴上有很 多資料可以參考所以也列入參考選項,詴片是如圖 3-2 中的懸臂樑詴片,利 用雷射都普勒(Laser Doppler Vibrometer ,LDV)機台跟網路分析儀(network analyzer)搜尋共振頻率,並量測共振頻率附近的激振振幅,得到振幅-頻率 的關係圖,再利用此資料來換算等效 E 值跟阻尼比的大小。圖 3-2 單晶矽 SEM 圖 將這兩種詴片利用上述方法可以得到下圖的量測結果 圖 3-3 (a)電鍍鎳頻率響應圖 (b)單晶矽頻率響應圖 利用共振頻率的數值跟軟體模擬就可以得到材料的等效楊氏系數 (Young’s modulus, E 值)。 1. 電鍍鎳(electroplated Ni):156GPa 2. 單晶矽(Single-Crystal Silicon):158GPa 3.1.2 阻尼比量測結果 阻尼比的量測有很多種方式,一般常見的半功率法適用於暫態系統中, 因為這次的實驗是利用穩態響應的應用,所以在阻尼比的量測跟換算我利用
首先是利用 ANSYS 的方法來模擬,在這邊主要是利用 ANSYS 的簡諧 分析的功能,一般使用上是設定一個簡諧周期變化的外力,但在本實驗的情 況是利用控制外部振動源的振幅,所以在模擬分析的設定上也是將簡諧周期 變化的外力改變成簡諧周期變化的振幅,同時在變數設定上除了一般的幾何 尺寸之外,還加上阻尼比的變化,利用不同阻尼比繪出不同的振幅-頻率的 關係圖來做比較,如圖 3-4 所示。 圖 3-4 ANSYS 振幅簡諧模擬 將不同的阻尼比所繪出的圖形跟實際的實驗值做比較就可以估算出大 概系統阻尼比大概的值,如圖 3-5 是電鍍鎳的阻尼比比較圖跟單晶矽的阻尼 比比較圖。 圖 3-5 (a)電鍍鎳的阻尼比比較圖 (b)單晶矽的阻尼比比較圖 從圖 3-5 頻率跟振幅關係的模擬值跟實驗值可以知道電鍍鎳詴片的阻尼 比大約在 0.0012,而單晶矽的阻尼比大概落在 0.0004 的位置上。
另外一種方法是利用品質因子(quality factor) (Q factor)來換算成阻尼比 的方法,實際使用上利用 Q factor 的公式來做換算,並參考圖 3-6 的圖形, 並將實驗量測的數值帶入找出阻尼比來。 圖 3-6 Q 值換算阻尼比 n n Q 2 2 1 (3-1) 其中ω1跟ω2是振幅 0.707 倍的頻率所在 1 2 電鍍鎳(electroplated Ni)的部分 KHz KHz KHz 162.58 n 162.4 26 . 162 2 1 00129 . 0 10 29 . 1 3 - 單晶矽(Single-Crystal Silicon)的部分 KHz KHz . KHz 50324 n 50.305 283 . 50 2 1 0004 . 0 10 07 . 4 4 - 跟模擬的值比較都很接近,同時利用此方法可以很快的用雷射都普勒 (Laser Doppler Vibrometer ,LDV)機台來得到估算的阻尼比的值,在利用上可 以減少實驗可行性的分析時間。
來看影響阻尼比主要的因素,經由計算可以得知: ξ11 ξ21都遠小於量測到的阻尼比值,因為詴片的尺寸很小而空氣阻力所 造成的阻尼比也相對很小,這邊本實驗透過抽真空的方式,再做一次量測可 以發現跟一般空氣下所量到的阻尼比大小差不多,透過這個實驗我們可以知 道這個計算結果是合理的。 主要的阻尼比組成為ξ31跟ξ41而其中ξ31跟結構阻尼有關,所以只能透 過材料的選擇來篩選,而支承點損失ξ41可以透過設計來改變大小,首先先 計算圖 3-1 電鍍鎳跟圖 3-2 單晶矽中的懸臂樑詴片的 ξ41: 電鍍鎳(electroplated Ni)的部分 5 3 3 41 0.23 4.968 10 l h
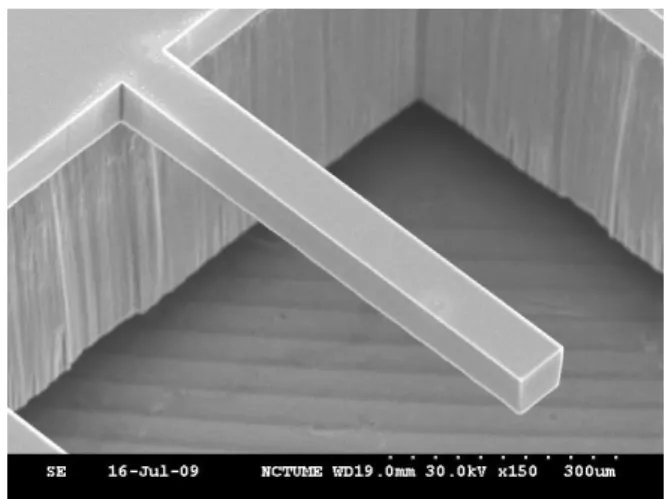
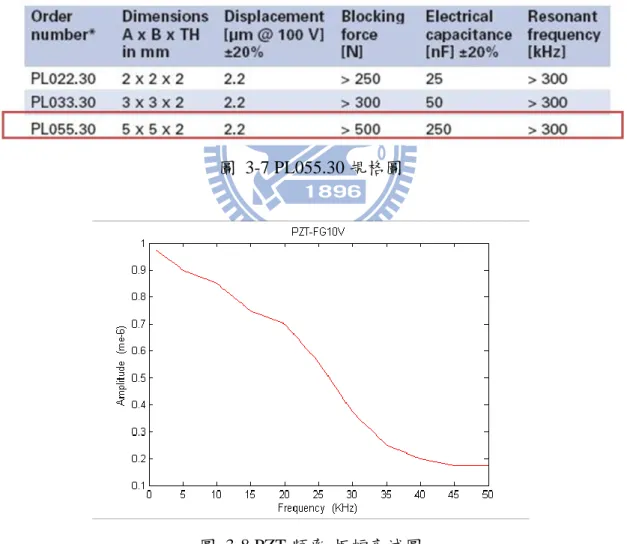
單晶矽(Single-Crystal Silicon)的部分 4 3 3 41 0.23 1 10 l h 對照前面所量得的電鍍鎳詴片的阻尼比大約在 0.0012,而單晶矽的阻尼 比大概落在 0.0004 的位置,可以發現電鍍鎳的阻尼比大都來自結構組尼的 部分,要利用尺寸設計來縮小阻尼比有較大的困難,所以必頇做可行性的分 析。3.1.3 實驗可行性分析 利用 2.1.4 所得到可行性分析公式來驗證這兩種材料是否符合實驗的限 制,其中還欠缺的是致動器的效能數據,致動器是由 CIC 提供的 Z 軸壓電 制動器,是由 PI 公司販售的 PL055.30 規格如圖 3-7 所示,在實驗上發現利 用此壓電片如有經過放大器會發生發熱的現象使固定詴片的膠融化影響量 測的精度,所以在實驗上直接由波形產生器(Function generator)提供所需能 量,在此前提下再利用雷射都普勒(Laser Doppler Vibrometer ,LDV)來將致動 器的效能繪製成如圖 3-8 的 PZT 頻率-振幅衰減圖。
圖 3-7 PL055.30 規格圖
從 2.1.4 中的式子(2-16)
σ
2L
EtY
2 03
max
(2-16) 上式參數未知的值有: Y0:由圖 3-8 的資料可以估算出來,實驗設計上希望共振頻率可以操作 在 20K 以內所以 Y0的值大約在0.7μm。 σ:這裡是材料所需達到的疲勞限(fatigue limit)的值。 L:為了配合量測設備最長為 700μm t:厚度由至成決定 電鍍鎳:15μm 單晶矽:50μm 其他的材料系數由 3.1.1 將電鍍鎳(electroplated Ni)跟單晶矽 (Single-Crystal Silicon)材料的所需阻尼比求出,並用 3.1.2 所求出的阻尼比來 驗證實驗的可行性 1. 電鍍鎳(electroplated Ni) 根部應力大約要 2.5Pa E 值:156e+09 N/m^2001
.
0
3
max
σ
4L
EtY
2 0
00129 . 0 2. 單晶矽(Single-Crystal Silicon) 根部應力大約要 2.5Pa E 值:158e+09 N/m^200677
.
0
3
max
σ
2L
EtY
2 0
0004 . 0 對照式子(2-16)可以知道電鍍鎳的部分無法達到實驗要求,除非利用效 能更好的致動器來改變 Y0的值,所以本次實驗材料選用單晶矽。
3.2 製程設計
本實驗因為要製作質量塊來達到所需的相對位移跟共振頻率,所以在製 程設計上選用 RIE 蝕刻跟雙面對準技術來製作單晶矽材料的詴片,為了達 到最大的質量塊厚度所以在製程設計上將詴片吃穿,利用晶圓本身的厚度來 達成目標,同時單晶矽在 MEMS 的領域應用廣泛,也有許多人做過相當多 的數據可以來做比較,其中也有許多是利用 RIE 製程來設計詴片的例子。 表 3-1 實驗詴片製程步驟表 特別感謝 科儀中心 林郁欣學長 提供 ICP-RIE 製程 幫忙製作詴片3.3 詴片設計
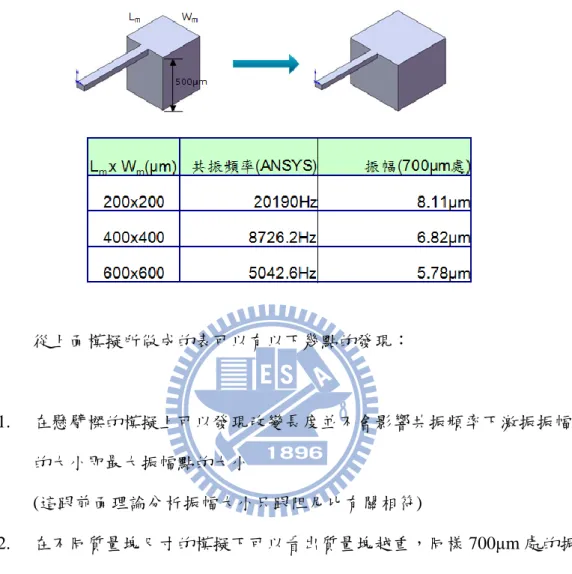
詴片的尺寸設計上有許多重要的參數,製程上的限制會影響質量塊跟懸 臂樑的厚度,在製程確定後還要考量量測設備的限制,所以在懸臂樑長度尺 寸上不可以設計超過 1000μm,在材料參數上要考慮單晶矽的楊氏係數、疲 勞限等等,其他在詴片的尺寸設計上會直接影響的有結構的共振頻率、質量 塊重量、懸臂樑 k 值,這些都是會影響相對位移的參數所以有必要對晶圓使 用的單晶矽材料做一些基本的材料性質量測,並做詴片尺寸的最佳化設計。 3.3.1 詴片尺寸 ANSYS 模擬測詴 首先建立一種跟實驗方式類似的 ANSYS 模擬方式,在正式製作詴片前 可以做為尺寸設計的參考。 在這裡是利用跟 3.1.2 中的 ANSYS 的設定方式來做模擬,在固定材料 參數跟阻尼比的值後,將變動的變因設定成 2 種不同的情況,一種是懸臂樑 將懸臂樑長度設為變因,另一種是質量塊,因為製程的關係質量塊的厚度是 固定的,所以改變的是質量塊的長寬做等比例的變化,利用這些尺寸參數先 用 ANSYS 的模態分析找出出平面振動的共振模態跟共振頻率,再利用 3.1.2 中的 ANSYS 的設定方式來做激振情形的系統振幅大小模擬,由上述方法得 到以下這些統整數據: 表 3-2 不同懸臂樑長度激振振幅比較表 3-3 不同大小質量塊激振振幅比較 懸臂樑長度為 700μm,而振幅的量測點也定義在 700μm 處,這樣振幅 的觀測才不會受到質量塊尺寸的影響。 從上面模擬所做成的表可以有以下幾點的發現: 1. 在懸臂樑的模擬上可以發現改變長度並不會影響共振頻率下激振振幅 的大小即最大振幅點的大小 (這跟前面理論分析振幅大小只跟阻尼比有關相符) 2. 在不同質量塊尺寸的模擬下可以看出質量塊越重,同樣 700μm 處的振 幅卻越小,同時振幅都比沒有質量塊的懸臂樑更小 (從這邊可以知道線性理論仍有欠缺的部分) 從 3.1.3 可以知道致動器的振幅會受到頻率高低的影響,因為如此本實 驗的操作頻率有其限制所在,在設計詴片的共振頻率時就會受其限制,所以 為了降低共振頻率必頇利用質量塊的重量,在模擬的情況下發現增加質量塊 會使振幅縮小情形必頇了解其原因為何,並將這個影響降低。
3.3.2 非線性振動理論分析 從論文[12][13]的非線性振動理論說明可以知道,當系統發生非線性振 動的情形時,振幅的最大值在無阻尼情況下將不再會是無限大的值,會有一 個限制的值存在,此時適用於線性系統的振幅最大值的放大率公式(2-11)將 不再適用。 2 1 k m Y Z 2 0 0 (2-11) 而振動系統可以視為線性振動的部分都是在位移很小的時候,實際的振 動系統會受到系統自身或周圍其他因素而影響系統本身的振動狀態,就是非 線性振動,因為本實驗所需利用的就是振動系統本身的最大振幅值必頇要達 到實驗的限制條件,而在非線性振動的情況下如前面所述會影響到(2-11)式 的使用,所以必頇將此影響降低。 從論文中可知在非線性系統下彈簧常數已經不能用ㄧ固定值來表示,所 以運動方程需要改寫為: ) (x F kx x x m ) 1 ( 1 2 2 0 k k x k x k (3-2) 其中 k0像是線性振動的彈簧常數 k1、k2是 first-order anharmonic 跟 second-order anharmonic 的項,假設只考慮 k1、k2的項並將式子化成 x 的微 分方程可以將(3-2)簡化成下面的式子: ) cos( 2 2 1 2 2 x2 A ωt φ m k x m k x ω x ξω x n n (3-3) 其中論文中提到 k1、k2的值會影響頻率響應圖的尖端處會有偏移,其中 又以 k2值的正負影響較大,如圖 3-9 所示,這種情形發生時會產生相位變化 的點跟實際上最大振幅的點不重合的現象,且因為彎曲的現象造成同一頻率 有 2 個穩定狀態,所以在掃頻振幅量測時會有跳躍現象,從高頻掃到低頻跟 從低頻掃到高頻的圖形會有所不同。
圖 3-9 非線性振動影響 在本論文對共振頻率飄移的部分比較不重視,主要是要知道非線性現象 對最大振幅的影響,由[12]裡可以得知如圖 3-10 的 xc的振幅公式: 2 1 2 12 5 8 3 3 3 2 k k κ κ Q xc (3-4) 圖 3-10 非線性振動振幅 這裡可以知道在非線性振動情況下,最大振幅受 Q 值的影響,Q 值越 大則振幅會縮小,所以在尺寸設計上要多考慮此點。
3.3.3 詴片尺寸設計 由以上的理論分析可以知道,利用質量塊來降低共振頻率將會增加非線 性振動的狀態,進一步影響所需的最大位移,同時頻率太高的話制動器又沒 有足夠的效能來提供所需的激振振幅,所以在尺寸的最佳化下利用有平板但 無質量塊的詴片,來達到想要的共振頻率確又不增加更大的質量塊來避免此 情形,同時為了增加應力集中的效應所以也將缺陷設計上去。 圖 3-11 詴片設計圖
3.4 詴片成果
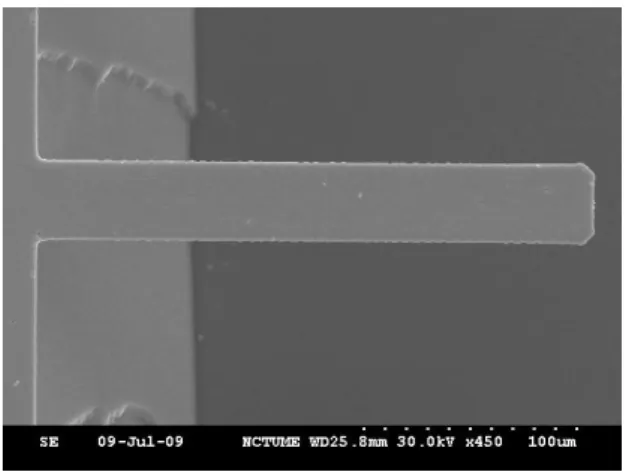
製程因為需將晶片蝕穿,所以有貼了兩層 blue Tape 及一片玻璃 holder, 晶片在蝕刻過程中散熱變差,溫度升高導致蝕刻垂直度跑掉,如圖 3-12 所 示,從圖中可以知道雙面對準的誤差都在可容忍的範圍內,疲勞實驗以有缺 陷的平板詴片跟懸臂樑詴片為主要的目標如圖 3-13 所示,使用這 2 種測詴 單元就不會受到質量塊準直性不好的影響。 圖 3-12 詴片 SEM 圖 1 圖 3-13 詴片 SEM 圖 2
3.5 量測規劃
3.5.1 量測機台介紹統整上述在理論基礎、詴片設計跟製程設計上的需求,就可以知道所需 要量測的數據為何,其中會用到的實驗儀器介紹如下:
1. 白光干涉儀(White Light Interference)(由 CIC國家晶片系統設計中心提 供)如圖 3-2 所示,白光干涉儀主要是用於非接觸式的表面輪廓量測, 量測詴片因為雙面對準的關係,所以在詴片上難免會有底切的問題所以 會利用白光干涉儀來量測底切,跟表面粗糙度
圖 3-14 White Light Interference
2. 雷射都普勒(Laser Doppler Vibrometer,LDV)(由 CIC國家晶片系統設計
中心提供)只能用於量測出平面的動態位移或速度,特色是可以補助
MMA 做更快的掃頻動作,對於出平面頻率響應的詴驗速度有很大的幫 助,同時也是本實驗主要疲勞詴驗的振幅量測儀器。
3. 運動型 MEMS 測詴儀器(MEMS Motion Analyer)(由 CIC國家晶片系統 設計中心提供)如圖 3-1 所示本實驗主要利用此儀器的出平面的動態位 移量測能力來做材料機械性質跟疲勞詴驗的量測,此運動型 MEMS 測 詴儀器基本性能如下: ◦ 位移、加速度 MEMS 詴件的綜合測詴系統 ◦ 光學測詴系統為干涉顯微鏡 ◦ 可以量測三維的位移 ◦ 標準量測模式 頻率響應:振幅、相位隨頻率變化 瞬間位置:某一頻率下瞬間位置、相位分析 三維六個自由度的綜合分析
圖 3-16 MEMS Motion Analyer 3.5.2 實驗規劃
所要量測的數值跟需使用的量測機台跟量測方法整理如下: 表 3-4 詴片規格量測:
表 3-5 詴片材料性質量測: 表 3-6 疲勞詴驗: 3.5.3 實驗流程 3.5.3.1 機械性質量測 首先因為詴片有質量塊的緣故,如果直接固定到制動器上會因為質量塊 的底部跟詴片底部高度相同而會同時固定在致動器上,此時質量塊就被固定 無法被激振起來,所以在詴片設計時刻意設計一種底部掏空的詴片黏在有質 量塊測詴單元的底部,如圖 3-17 所示: 圖 3-17 詴片放置方式
利用此種放置的方式可以有效增加詴片底部跟 PZT 表面的距離,同時 可以降低空氣阻力所造成的阻尼比的增加,解決詴片放置的方式後就是將如 圖 3-18 所示的設備架設起來量測詴片的機械性質。 1.利用 LDV 跟網路分析儀做頻率響應 2.利用網路分析儀的掃頻功能來求出等效 E 值和共振頻率 3.利用頻率響應的圖形來求得阻尼比 圖 3-18 實驗配置圖 1 3.5.3.2 疲勞實驗量測 疲勞詴驗是在已知機械材料性質下利用如圖 3-19 所示的實驗架設方法 做疲勞詴驗,直接利用 FG 當輸出端不經過放大器,因為在測詴時發現經放 大器會使黏著的膠產生融化的現象,因此而影響詴驗的精準度,並利用此方 法不放詴片量測出 3.1.3 中所提到的壓電致動器位移隨頻率做變化的關係圖, 並利用錄影的方式來做疲勞實驗的時間記錄,且可由雷射點的變化來辦定實 驗開始的時間,也不會發生詴片斷裂紀錄時間慢一拍而導致實驗誤差。
1.利用 LDV 做出平面的疲勞詴驗 2.利用 FG 設定固定頻率來做量測 3.利用示波器來監視振幅的變化 4.利用電腦錄製影片跟頻率換算成往復的次數 5..控制振幅跟頻率來得到不同的根部應力(相對位移) 詴片受到周期性的應變 圖 3-19 實驗配置圖 2
第四章
量測與討論
4
4.1 量測結果
4.1.1 詴片尺寸量測 詴片的寬跟長還有底切等平面尺寸利用白光干涉儀的拍照解析圖片功 能來量測,如圖 4-1 可以看出可以由圖片分析出邊界所在來判斷尺寸為何, 利用 SEM 將詴片缺口(notch)處的圓角情形拍攝起來,並利用 Solidworks 的 草圖繪製功能將圓角的半徑找出來,如圖 4-2 所示,這樣才可以降低在模擬 時模型跟實際詴片形狀的誤差,也代表利用此模型所做出的静態模擬跟模態 分析的結果會更精準。厚度的量測是利用表面輪廓儀(ET4000)量測,但因為詴片被掏空所以量 測上會有誤差存在,在實際換算下還會加上模擬的方式,利用共振頻率跟等 效 E 值來回推厚度,再跟 ET4000 量測的值比較。 4.1.2 非線性振動驗證 由 3.1.1 表 3-2 跟表 3-3 的模擬資料可以知道懸臂樑長度跟質量塊大小 對於激振振幅的影響,在這邊由實驗的方式來驗證此一現象,詴片尺寸上對 照表 3-2 跟表 3-3 來做設計,所得到的實驗結果如下表 4-1 跟表 4-2 所示: 表 4-1 不同懸臂樑長度激振振幅實驗值比較 表 4-2 不同大小質量塊激振振幅實驗值比較
實驗上不管表 4-1 還是 4-2 的詴片都經過設定將壓電致動器的振幅做統 一並盡可能逼近 3.3.1 的模擬值,這樣才可以跟 3.3.1 的模擬值做同等的比較 並驗證非線性現象的存在。 表 4-1 跟表 3-2 比較可以知道,模擬得到的現象跟實驗情況一樣,不管 懸臂樑的長度變化,最後激振出的端點位移都相差不多,可以驗證 2.1.2 激 振放位移大率只跟阻尼比有關的現象,所以可以知道當詴片呈現懸臂樑這種 對稱形狀時非線性振動的現象比較不明顯所以 2.1.2 的公式依舊詴用。 表 4-2 跟表 3-3 比較時可以發現,共振頻率的大小有較大的差異,這可 以參考 3.4 詴片成果的 SEM 圖可以知道質量塊因為有準直性的問題所以形 狀上沒有很正確,但可以明顯的看出加了質量塊的激振振幅都比表 4-1 的振 幅還小,驗證非線性現象會影響詴片最大振幅且會使振幅縮小。 在 3.3.2 中可以由式子(3-2)知道在非線性振動情況下 Q 值越高則激振出 的振幅會越小,同時我們知道阻尼比的公式如式子(4-1)所表示,同時我們知 道 Q 值可以表示成式子(4-2)的形式: κ Q xc 3 3 2 (3-2) km C ξ 2 (4-1) 2 1 Q (4-2) 所以由上述的 3 個式子我們可以看出一些關係,首先增加質量塊的重量 在式子(4-1)中可以知道會減少阻尼比,而式子(4-2)告訴我們阻尼比減少會增 加 Q 值,而式子(3-2)中可知 Q 值增加會減小在非線性振動下的最大振幅, 所以最後我們就會知道增加質量塊在非線性系統下如果 Q 值提升那振幅會 變小,所以為了驗證所以量測有無質量塊的詴片 Q 值跟振幅如圖 4-3 所表示,
圖 4-3 非線性振動驗證
4.2 疲勞詴驗
實驗平台的架設如 3.5.3.2 中所設計的一樣。 1.找出共振頻率 2.將 FG 設定在共振頻率 3.建立標準 設定 FG 從 1V~破斷時電壓 4.設定實驗電壓 5.錄影開始 啟動 FG 從示波器紀錄振幅 詴驗都在共振頻率附近,在正式疲勞詴驗開始前都會確認詴片破斷的電 壓在哪個附近,所以都對慢慢加電壓並記錄激振振幅大小直到詴片破斷,在 以此為標準將要做疲勞詴驗的電壓值確認出來,放置好詴片跟電壓後先將錄 影設定開始再啟動 FG,此時如何判斷實驗開始,可以從影片裡發現當 FG 啟動時雷射點會變形如圖 4-4 所示,而單晶矽發生疲勞破斷時是瞬間發生的, 如圖 4-5 所示,整個實驗期間振幅都很穩定,而且破斷都發生在設計的缺陷 處如圖 4-5 所示。圖 4-4 白光干涉儀尺寸量測 圖 4-5 白光干涉儀尺寸量測 實驗數值確認後,為了要把量測到的振幅值換算成應力值來繪製 S-N 曲線,同時詴片設計上有缺陷設計所以應力值必頇由模擬所得,在本實驗是 利用 Solidworks 並搭配 COSMOS 來做模擬,如圖 4-6 在設定網格時必頇將 缺陷處做重點細部處理。
利用靜態模擬的方式,設定一假想力來使詴片變形到跟實驗振幅一樣的 位置,並以此來模擬最大的應力值,如圖 4-7 所示。 圖 4-7 假想力模擬變形 最後將所有的資料整理成圖 4-8 的 SN 曲線,其中黑色的點是利用有缺 陷設計且前端有平板的詴片所做的實驗資料點,因為此詴片的共振頻率大概 在 20KHz 的位置上,適合用於低次數高應力的量測,而灰色的點是利用有 缺陷設計的懸臂樑詴片所做的實驗資料點,共振頻率大概在 130KHz 的位置 上,適合用於高次數低應力的量測,而最右邊有箭頭的點代表不會振斷的 點。 圖 4-8 S-N 曲線
將論文[6][7][15]三篇對於單晶矽的論文所做的 SN 曲線放在同一個尺度 下來看如圖 4-9 所示,可以發現 Muhlstein et al.(2001) 跟 Pierron et al.(2006) 等人利用致動器製作於詴片來達到控制位移手段的疲勞測詴方法所得到的 數據有很大的出入,而且可以發現這種方法只適用於平面測詴的方式,而 Komai et al.(1998)等人所作的方式是跟本實驗比較類似的出平面疲勞測詴的 方式,其中是利用探針接觸詴片並推動使其彎曲變形來測詴所以會遇到實驗 速度受機台限制而無法增快的問題,所以只能有到百萬次左右的數據,可以 發現因為量測方法的不同所以所得到的應力大小也有很大的差距,致動器內 置形數據有很大的偏差,而 Komai et al.(1998)等人的數據較接近本文。
將 Komai et al.(1998)等人的數據單獨跟本文實驗數據比較,如圖 4-10 所示可以看出當 Komai et al.(1998)等人的數據開始因為次數提升而應力下 降時剛好可以跟本文的數據做一個連結,且兩篇文章所得到的破裂應力也相 當接近。 圖 4-10 S-N 曲線-單晶矽比較 2 論文[14]裡提到並整理許多多晶矽的疲勞測詴論文,為了知道其差異所 以也將本文的 S-N 曲線跟論文[14]的 S-N 曲線的整理做比較如圖 4-11 所示, 可以發現整個點資料的分布很廣,但是本文的數據都在範圍內。
第五章
總結與未來工作
5
5.1 總結
如同文獻回顧中所提到的,在微系統的疲勞測詴有許多不同的方法,各 有所優缺點,而本論文的目的就是提出一種新的選擇,在這個部分,我們最 後是成功的完成此快速疲勞測詴方法的建立,希望這種疲勞測詴方法的建立 的可以讓之前無法測詴的材料或結構多一種選擇,不用為了要高速量測而製 作複雜的致動器結構,這對將疲勞詴驗的次數推升也是有所幫助。 在這邊我們也將此高頻振動式微結構疲勞測詴方法的可行性公式化:σ
2L
EtY
2 03
max
利用上面的式子跟阻尼比的大小快速判斷材料是否適用。在實驗中也利用微 機電領域中最常見的兩種材料:電鍍鎳、單晶矽來做可行性的驗證,並對此 兩種材料的懸臂樑詴片做阻尼比的量測實驗,最後得到阻尼比大小電鍍鎳: 0.00129、單晶矽:0.0004,確立阻尼比的量測方法,並利用阻尼比跟非線性 振動的理論分析了解詴片尺寸跟形狀的設計方向跟最佳化。 在實驗方面,透過 CIC 所提供的 LDV 機台跟不同的實驗配置,建立材 料性質跟疲勞詴驗兩種不同的實驗流程,並確立疲勞詴驗的實驗步驟跟量測 方法,透過錄影換算次數跟模擬來得到應力值,最後成功繪製出單晶矽材料 的 S-N 曲線,並求得單晶矽的疲勞限為 1.334GPa。 最後在疲勞測詴上本論文成功的建立一種新式快速的疲勞測詴方法,雖 然本方法對實驗的材料有限制條件的存在,但如果有效能更好的致動器,或 更精準的量測方法,便可使本論文所建立的疲勞測詴方法適用於更廣的範 圍。5.2 未來工作
在未來工作上,首先是對於平面式疲勞詴驗的進行,這部份現有的實驗 裡已經嘗詴利用致動器振斷,這部份是可以達成的,但是問題是出在量測方 法上,原因是因為量測機台 MMA,前面有提到平面式的疲勞測詴是利用 MMA 機台來做量測,這部份實驗的結果發現 MMA 所量到的位移資料,跟 直接觀察拍攝到的照片相比有很大的誤差,因為 MMA 有可以在每個週期做 不同相位角度的曝光拍照功能,所以我可以得到詴片不同相位下變形的照片, 利用這個照片跟詴片平面尺寸比較的結果,可以發現跟實驗數據有段差距, 所以平面的位移量測必頇改進才可以進行這部份的實驗,現階段是想利用在 詴片上增加刻度的設計,來達到量測位移的目的。 第二個部份,是利用不同的材料來進行來進行疲勞詴驗,這部份主要是 因為前面的文章有提到,本論文提出的實驗方式是有材料選擇的可行性限制, 但從提出的公式我們可以知道,當我們利用更高效能的制動器,跟更高精度 的量測平台時,此時在材料的適用範圍就更廣泛,甚至複合式的材料也可以 利用這個方法來做驗證。參考文獻
[1] Teachung Yi and Chang-Jin Kim, ―Measurement of mechanical properties for MEMS materials,‖ Meas. Sci Technol, pp. 706–716, 1999.
[2] T. Tsuchiya, O. Tabata, J Sakata and Y. Taga, ―Specimen size effect on tensile strength of surface-micromachined polycrystalline silicon thin films,‖ Microelectromechanical Systems, Vol. 7, No. 1, pp. 106–113, 1998.
[3] H.S. Cho, K.J. Hemker, K. Lian, J. Goetter and G. Dirras, ―Measured mechanical properties of LIGA Ni structures,‖ Sensors and Actuators A, pp. 59–63, 2003.
[4] Dongil Son, Jong-jin Kim, Tae Won Lim, and Dongil Kwon, ―Evaluation of fatigue strength of LIGA nickel film by microtensile tests,‖ Scripta Materialia, 50, pp. 1265–1269, 2004
[5] K.P. Larsen, A.A. Rasmussen, J.T. Ravnkilde, M. Ginnerup, and O. Hansen, ―MEMS device for bending test: measurements of fatigue and creep of electroplated nickel,‖ Sensors and actuators A, 103, pp. 156–164, 2003
[6] C. L. Muhlstein, S. B. Brown, and R. O. Ritchie, ―High-Cycle Fatigue of Single-Crystal Silicon Thin Films‖, Journal of Microelectromechanal Systems, Vol. 10, No. 4, pp. 593–600, 2001.
[7] Komai, K., Minoshima, K., and Inoue, S., "Fracture and fatigue behavior of single crystal silicon microelements and nanoscopic AFM damage
evaluation" , Microsystem Technologies, pp. 30-37, 1998.
[8] S. Maekawa, K. Takashima, M. Shimojo, Y. Higo, S. Sugiura, B. Pfister and M.V. Swain, ―Fatigue tests of Ni–P amorphous alloy microcantilever beams,‖ Japanese Journal of Applied Physics, 38, pp. 7194–7198, 1999.
[9] T. Namazu, Y. Isono, ―High-cycle fatigue damage evaluation for
micro-nanoscale single crystal silicon under bending and tensile stressing‖, Micro Electro Mechanical Systems, 2004. 17th IEEE International
Conference on. (MEMS), pp. 149-152, 2004.
[10] Jinling Yang, Takahito Ono, Masayoshi Esashi, ―Mechanical behavior of ultrathin microcantilever‖,Sensors and Actuators A , 82,pp. 102–107, 2000. [11] H. Hosaka, K. Itao, S. Kuroda, ―Evaluation of energy dissipation mechanisms
[12] V. Kaajakari, T. Mattila, A. Oja, H. Sepp¨a, V. Kaajakari, T. Mattila, A. Oja, H. Sepp¨a, ―Nonlinear limits for single-crystal silicon microresonators‖ , J. Microelectromech. Syst., vol. 13, no. 5, pp. 715–724, 2004.
[13] V. Kaajakari, T. Mattila, A. Lipsanen, and A. Oja, ―Nonlinear mechanical effects in silicon longitudinal mode beam resonators, Sensors Actuators A, vol. 120, no. 1, pp. 64–70, 2005.
[14] W. N. Sharpe Jr. andW. N. Bagdahn, ―Fatigue testing of polysilicon—a review,‖ in Mech. Mater., 2004.
[15] O.N. Pierron and C.L. Muhlstein, ―The Critical Role of Environment in Fatigue Damage Accumulation in Deep-Reactive Ion-Etched Single-Crystal Silicon Structural Films,‖ Journal of Microelectromechanical Systems 15, pp. 111–119 , 2006.

![圖 3-9 非線性振動影響 在本論文對共振頻率飄移的部分比較不重視,主要是要知道非線性現象 對最大振幅的影響,由[12]裡可以得知如圖 3-10 的 x c 的振幅公式: 2 12 12583332 kκkκQxc (3-4) 圖 3-10 非線性振動振幅 這裡可以知道在非線性振動情況下,最大振幅受 Q 值的影響,Q 值越 大則振幅會縮小,所以在尺寸設](https://thumb-ap.123doks.com/thumbv2/9libinfo/8762579.208519/42.892.155.802.112.251/大振幅可以得知如圖振幅公式情況下最大振幅受值的影響Q振幅.webp)