I-Shou University Institutional Repository:Item 987654321/11388
51
0
0
全文
(2)
(3) 致謝 在這說不長也不短的兩年研究生生涯裡,感謝指導教授李青旻博士,給予了必要的 學術上指導,更教導了面對事情時應有的態度及方法,因此在這段時間裡,真的是收益 良多。而對於本論文的完成,感謝口試委員:中山大學機械與機電工程學系彭昭暐教授、 義守大學電機工程學系馮介川教授,在百忙之中,仍撥空前來並且給予寶貴的建議及指 正,使得本論文更臻完善。 在此感謝同實驗室的同儕國軒、振銘及影像處理實驗室裡的同儕銘輝、峰昇、博駿 還有學弟偉誠,在這段時間內給予的各方面協助,在處理一些事情上能較有效率的來進 行。 而最後要感謝父母在這段時間裡,在生活上的支持,使得學業上能得以順利的完成。. i.
(4) 中文摘要 網路型控制系統之延遲分析與設計. 研究生:鍾志明. 指導教授:李青旻 博士. 義守大學電機工程學系. 摘要 由於網路型控制系統的許多優點與挑戰,使其成為近年來重要的研究主題之一。 透過網路傳遞的訊息,因網路條件因素的影響或限制,造成傳遞延遲或封包遺失等的現 象,是在討論網路型控制系統時必須面對的挑戰。本論文針對網路型控制系統的時間延 遲進行相關討論,利用 Lyapunov 穩定理論結合線性矩陣不等式(LMI)的技巧,推導出對 應的穩定準則,進一步設計控制器。另以數值模擬說明所提出的方法是有效的。 關鍵字:網路型控制系統(NCSs)、時間延遲、線性矩陣不等式(LMI). ii.
(5) 英文摘要 Analysis and Design for Networked Control Systems with Delay. Graduate:Chih-Ming Chung. Advisor:Dr. Ching-Min Lee. Department of Electrical Engineering I-Shou University. Abstract Networked control systems (NCS) are important topics in recent years because of its advantages and challenges. The phenomena due to possible delay and lossy-measurements as a result of networked transmission constraints are main considerations when one analyzes or designs a networked control system. This paper intends to study the stability analysis and feedback controllers design problems for networked control systems with time delay due to networked transmission. Lyapunov based methods will be applied to find the corresponding time-delay conditions. We will try to convert all conditions to as linear matrix inequalities, for which numerical solutions are easily to find. Some numerical examples are given to show the effectiveness of proposed methods. keywords:networked control systems (NCSs), time delay, linear matrix inequalities (LMI). iii.
(6) 目錄 致謝....................................................................................................................................... i 中文摘要 .............................................................................................................................ii 英文摘要 ........................................................................................................................... iii 目錄..................................................................................................................................... iv 圖目錄 ................................................................................................................................. v 第一章 緒論 ....................................................................................................................... 1 1.1 前言....................................................................................................................... 1 1.2 研究的動機與目的 .............................................................................................. 1 1.3 文獻回顧 .............................................................................................................. 3 1.4 論文架構 .............................................................................................................. 3 第二章 網路型控制系統的延遲分析 ............................................................................... 5 2.1 網路型控制系統的延遲分析 .............................................................................. 5 2.2 節點驅動模式 ...................................................................................................... 8 2.3 取樣週期 ............................................................................................................ 10 第三章 數學的分析 ......................................................................................................... 12 3.1 系統的假設設定 ................................................................................................ 12 3.2 時間延遲的數學分析 ........................................................................................ 13 3.3 設計問題 ............................................................................................................ 17 3.4 穩定度分析與控制器設計 ................................................................................ 20 第四章 數值模擬 ............................................................................................................. 25 4.1 系統的數值模擬 ................................................................................................ 25 第五章 結論 ..................................................................................................................... 36 5.1 討論..................................................................................................................... 36 5.2 未來方向 ............................................................................................................ 36 参考文獻 ........................................................................................................................... 39 附錄.................................................................................................................................... 42. iv.
(7) 圖目錄 Fig. 1.1 點對點的控制系統 ................................................................................................ 1 Fig. 1.2 典型的網路控制系統架構 [3] ............................................................................. 2 Fig. 2.1 控制器區域網路跟乙太網路時序圖 .................................................................... 5 Fig. 2.2 含有時間延遲的網路控制系統 ............................................................................ 6 Fig. 2.3 時間驅動模式示意圖 ............................................................................................ 8 Fig. 2.4 事件驅動模式示意圖 ............................................................................................ 9 Fig. 2.5 被取樣的訊號(中間)和取樣後的訊號(兩邊)無交疊......................................... 10 Fig. 2.6 被取樣的訊號(中間)和取樣後的訊號(兩邊)交疊............................................. 11 Fig. 3.1 訊息傳遞總延遲時序圖 ...................................................................................... 12 Fig. 3.2 訊號 u(t)及延遲訊號 u(t − τ ) 的關係 .................................................................. 14 . Fig. 3.3 訊號 u(t)及延遲訊號 u(t − dh + h − τ ′) 的關係 ................................................... 15 Fig. 3.4 延遲時間大於取樣時間的系統方塊示意圖 ...................................................... 17 Fig. 3.5 網路型控制系統和網路時間延遲的迴路圖 ..................................................... 17 Fig. 3.6 一般化控制對象 .................................................................................................. 18 Fig. 4.1 使用 S 函式完成的系統 ..................................................................................... 25 Fig. 4.2 具時間延遲之系統零輸入狀態響應 ................................................................. 26 Fig. 4.3 數值模擬 1 的系統連接圖 ................................................................................. 27 Fig. 4.4 加入控制器後的系統零輸入狀態響應 ............................................................. 27 Fig. 4.5 數值模擬 2 的系統連接圖 .................................................................................. 28 Fig. 4.6 具/未具網路延遲之系統輸出 ........................................................................... 29 Fig. 4.7 加入控制器和無延遲之系統響應比較 .............................................................. 30 Fig. 4.8 時間延遲系統加入控制器前後之響應 ............................................................. 30 Fig. 4.9 無干擾及無延遲時之狀態響應 ......................................................................... 31 Fig. 4.10 有干擾及時間延遲之狀態響應 ....................................................................... 32 Fig. 4.11 數值模擬 3 的系統連接圖 ................................................................................ 33 Fig. 4.12 有干擾及時間延遲的 x1 狀態變數變化曲線(無控制器和有控制器) .......... 33 v.
(8) Fig. 4.13 有干擾及時間延遲的 x2 狀態變數變化曲線(無控制器和有控制器) .......... 34 Fig. 4.14 有干擾及時間延遲的 x1 狀態變數變化曲線(不同的 γ) ............................... 35 Fig. 4.15 有干擾及時間延遲的 x2 狀態變數變化曲線(不同的 γ) ............................... 35 Fig. 5.1 系統示意圖 [3] ................................................................................................... 37 Fig. 5.2 FC660 圖像.......................................................................................................... 38 . vi.
(9) 第一章 緒論. 1.1 前言 這個時代,不出門也能透過各種媒介來獲得資訊,如傳統的報章雜誌。新興媒 介網路的出現使得大量的資料或是資訊都可以透過網路作為資訊平台互相交流,提 供最新的訊息。 網路的歷史可溯及 60 年代,由當時的美國國防部所提的研究計劃,連接各大學 及國防承包商的電腦系統,完成 ARPANET 網路系統。雖然這個計畫是出自於軍事 考量,但是 ARPANET 的出現,的確提供了一個新的資訊交換方法。時至今日,網 路發展已經跟先前 ARPANET 有所不同,網路的影響也越來越大,網路在各領域的 利用,已是值得深入的議題。. 1.2 研究的動機與目的 . Physical plant. Actuator 1. …. Actuator m. Sensor 1. …. Sensor n. Controller. Fig. 1.1 點對點的控制系統 隨著網路技術和電腦科技的日益精進,傳統點對點結構 (point-to-point) 的控制 系統(Fig. 1.1)無法滿足複雜的工程系統對於控制系統的要求。由於網路的出現,提. 1.
(10) 供了一個新的資訊交換的方式,在各個領域上也被廣泛的運用,例如,通訊、影像 傳輸、自動化控制等。“網路型控制系統 (networked control systems,NCS)"[1][2] 便是以此發展出來的控制概念與應用。文獻[3]對網路型控制系統的定義為:系統的 主要功能元件(感測器、控制器、制動器)透過網路相互連接,相關訊息 (如參考輸入、 實體輸出、控制輸入等) 和數據透過網路進行交換,並傳遞給控制迴路,促使各元 件產生動作。典型的網路控制系統架構如 Fig. 1.2 所示。. Physical plant. Actuator 1. …. Actuator m. Sensor 1. …. Sensor n. Controller :Network :Information. Fig. 1.2 典型的網路控制系統架構 [3]. 以下摘要說明網路型控制系統的優點及必須考慮的因素。 網路型控制系統的優點:網路型控制系統是使用現成的網路線路做為傳遞的方式, 因而能降低系統線路配置,易於安裝擴充。以網路作為開放平台,元件可共享資源; 在面臨突發情況時,有自我檢測、自我修復等功能,系統有較高的可靠度和彈性, 維修上也較為容易。 網路型控制系統的考量因素:因頻寬的侷限或同時間有眾多使用者使用網路,造成 網路負載量很大時,經由網路傳送的封包訊息,必須考慮傳送過程中封包的完整性 和相關時間延遲所造成的效應。封包的遺失或不完整,對於一個即時的控制系統來 說,有機會造成錯誤的控制結果;網路負載量越大,所需要花費的時間自然也會增 2.
(11) 加,延遲對於系統性能的影響也會愈明顯,甚至造成整個系統的不穩定。更廣泛的 歸咎造成時間延遲現象的發生,其原因當然不僅於此,當然有分析與進一步瞭解的 動機與分析的必要。如果不能從網路既有的架構上進行提升,便必須針對網路控制 系統的兩個影響系統響應的因素,進行必要的分析和討論,而能在控制器設計之初 便涵蓋相關可能性的裕度。. 1.3 文獻回顧 近年來,網路型控制系統的研究已逐漸成為國內外控制領域的重點之一[4-7]。 由於網路型控制系統有別於傳統控制系統,必須考慮時間延遲對於系統穩定度影 響,以及封包遺失對於控制的影響等,這使得在分析設計網路控制系統時更為複雜, 因此,學者們對這兩議題,有著不同程度的研究,如[8-11]是對網路控制系統常數的 時間延遲作為探討,並建立其穩定性的條件;[12][13]則是分別討論時變的時間延遲 以及隨機的時間延遲,針對時變的時間延遲可先定出其時間延遲上下限後,配合節 點設置緩衝區,再來做數學分析,而對隨機產生的時間,則可透過在各節點設置緩 衝區將隨機時間延遲轉變成確定性的時間延遲進行處理,由於兩者都必須在節點上 設置緩衝區,因此必須多做假設;[14][15]則是針對特定的情況,一起討論時間延遲 跟封包遺失的結果。本論文是以常數的時間延遲作為討論,除了考慮一個典型的網 路型控制系統外,也考慮含有外部干擾[21] [22]的網路控制系統,對於節點,只須選 取合適的驅動模式,不需另作緩衝區的假設,並依此提出穩定性的條件。. 1.4 論文架構 本論文共分五章。第一章,以簡短的方式敘述網路型控制系統 (networked. control systems,NCS)的基本概念及特色,包含分析設計時必須要考量的重要因素。 第二章,先了解網路型控制系統迴路中哪一個部份或因素造成訊息傳送的延 遲,再針對相關的延遲進行分析,並提出改善的建議和可能的方法。 第三章則延續第二章的延遲分析,提出網路型控制系統的合理的系統假設,以 3.
(12) 建立相關的數學表示式,支援爾後的討論,並提出對應的網路型控制系統穩定性條 件。 第四章,使用 MATLAB 來模擬含有網路延遲的控制系統,並和一個沒有網路 延遲的系統作為對照,說明網路延遲對於控制結果的影響,再將第三章推導出來的 數學結果導入此模擬網路控制系統中,驗證其輸出結果,以達到一開始的設計目的。 第五章,結論本論文的內容,檢討本論文未竟之處,針對本研究相關主題可能 的發展,提出個人的看法作為結尾。. 4.
(13) 第二章 網路型控制系統的延遲分析 2.1 網路型控制系統的延遲分析 對網路型控制系統而言,時間延遲的現象無法避免,除了影響性能表現,也會 影響整個系統的穩定度。對於網路型控制系統進行適當的延遲分析,是設計控制器 之前必要的前置工作。由於在網路型控制系統中,延遲現象的成因和種類多元,因 此,有必要進行相對的延遲分析。. (1) 延遲發生原因:網路型控制系統本身在訊號傳遞上本就存在特定的作用時間延 遲。而在網路的使用上,若有其它使用者或是訊號使用該網路,因資訊量的暴增或 頻寬的限制,就有產生需求衝突(collision)的可能情形產生,這會使得傳送的訊息變 得不完整或是遺失,甚至產生更大的延遲。為了盡量避免這樣的情形發生,需要先 進行位仲裁(bitwise arbitration)或是衝突檢測(collision detection)。 以控制器區域網路(controller area network,CAN)跟乙太網路(Ethernet)為例。Fig.. 2.1 可以解釋控制器區域網路跟乙太網路對於同時有兩個節點(node)訊息要發送 CAN. Ethernet. 節點 1. kh. (k+1)h. (k+2)h. kh. (k+1)h. (k+2)h. 節點 2. Fig. 2.1 控制器區域網路跟乙太網路時序圖 5.
(14) 時的作法:控制器區域網路的介質接取控制式方式是使用載波偵聽多路存取/位仲裁. (carrier sense multiple access with bitwise arbitration,CSMA/BA),因此當有兩個或是 兩個以上的節點要發送訊息時,會依據其優先順序,如 Fig.2.1 中,較高的節點 1 優 先使用網路傳送訊息,其次才是節點 2。乙太網路的介質接取控制式方式則是載波 偵 聽 多 路 存 取 / 衝 突 檢 測 (carrier sense multiple access with collision detection ,. CSMA/CD),針對同時有兩個或以上的訊息要發送訊息時,會立即停止發送,並送 出阻塞訊號,等待了一段隨機的時間,再進行訊息發送,Fig. 2.1 中,節點 1 跟節點. 2 同時發送產生衝突,在依據其內部演算法定義各自的等待時間後,才把各自的訊 息再透過網路送出。 簡單的說,網路上若有很多使用者或訊息需同時使用網路、衝突量很大時,可 能產生足以影響響應的延遲,也可能會有主動或被動的封包遺失狀況。充分瞭解延 遲發生的原因,便可適切地針對該項因素,進行必要的調整、補救或控制。. actuator. sensor. plant. τ aq. τ sq. network τ ca. τ sc. τ cq2. τ cq1. Controller. τc. analog signal digital signal Fig. 2.2 含有時間延遲的網路控制系統 (2) 延遲發生之處:對網路型控制系統而言,延遲現象的發生主要出現在控制器、 制動器、感測器三者間,彼此透過網路互相交換訊息時,因此,延遲發生的類別就 會有多樣性的討論空間以及不確定性。Fig. 2.2 為含有延遲因子的網路型控制系統示. 6.
(15) 意圖,標示相關的延遲發生類別及現象。圖中符號分別為: 下標符號說明:s(sensor)、a(actuator)、c(controller)、q(queue). τ sq :感測器訊號排隊等待網路傳輸的時間延遲; τ sc :感測器透過網路傳送訊息到控制器的時間延遲; τ cq1 :控制器訊號排隊等待接收的時間延遲; τ cq2 :控制器訊號排隊等待傳輸的時間延遲; τ c :控制器執行所花費的時間; τ ca :控制器透過網路傳送控制訊號到制動器的時間延遲;. τ aq :排隊等待致動器接收產生動作的時間延遲。. 進一步分析. τ sq 和 τ sc 兩者是屬於網路傳送過程的時間延遲,可以合併成一個項目運算: τ sq + τ sc = τ sc τ cq2 和 τ ca 也屬於網路傳送過程的時間延遲,可以合併成一個項目運算: τ cq2 + τ ca = τ ca 由於控制器每次計算量不盡相同,因此, τ c 通常是時變的,但相較於其他延遲 項,其數值偏小,且現階段中央處裡器單位時間的計算能力十分強大,因此,透過 適當軟硬體更新升級,便可使其影響降低,進而忽略不計。. τ cq1 和 τ aq 則可以透過節點驅動模式的選擇,一般可選用事件驅動模式的方 式,使得 τ cq1 和 τ aq 兩項等於零。關於節點驅動模式會在下一節作相關的描述。 整合以上分析,系統的總延遲可以簡化為:. τ = τ sc + τ ca. 7.
(16) 2.2 節點驅動模式 網路型控制系統中節點驅動模式的選擇,具有改變延遲長度的關連性。節點驅 動模式,大致上可分成兩種類型:. (1) 時間驅動模式 (time-driven mode); (2) 事件驅動模式 (event-driven mode)。 在網路型控制系統中,感測器通常是採用時間驅動模式,其時脈跟控制器或系統是 相同的,而控制器和制動器可以是時間驅動模式或事件驅動模式兩者之一。但如果 控制器和制動器兩者,有其中之一是使用時間驅動模式,則會牽涉到時脈同步性的 問題。時脈同步性的實現可以透過硬體的方式或是軟體的方式來達到,一般而言, 時脈同步可使系統較容易分析。. A. 時間驅動模式 時間驅動模式的示意圖如 Fig. 2.3 所示。若控制器採用時間驅動模式,並且跟. 感測器有相同的取樣時間,則控制器會在每一次的取樣時間內,固定接收由感測器 傳送過來的訊息並加以處理,然後傳給制動器反應。但因為感測器到控制器這段的 時間延遲( τ sc )作用,可能會使得在接收訊息上產生一些問題,例如訊息拒絕(message. rejection)或空取樣(vacant sampling)。. vacant sampling. Sensor node. message rejection. Controller node Actuator node. (k-3)h. (k -2)h. (k -1)h. kh. Fig. 2.3 時間驅動模式示意圖 8. (k +1)h. (k +2)h.
(17) 訊息拒絕:當控制器會在已設定好的取樣時間內,接受由感測器發送的訊息, 並加以處理。如果此時有兩個或多個以上的訊息在同一取樣區域內被接受到,那麼 控制器將會以最新(newest)的訊息作為依據,而前一次的訊息則不會被使用到,這個 現象就被稱為訊息拒絕(message rejection)。Fig. 2.3 中,(k+1)h 至(k +2)h 這段區域時 間內有兩個訊息被控器接收到,但控制器最後僅處理(k +2)h 時的訊息。 空取樣:當控制器在某個取樣時間區域裡,沒有接到來自感測器發送過來的最 新訊息時,使得控制器在該取樣時間內可能沒有任何動作產生或是沿用感測器前一 次送來的訊息加以處理後輸出。這個現象被稱為空取樣(vacant sampling)。Fig. 2.3 中,(k-1)h 至 kh 這段時間內,由於訊息未能在這段時間內及時到達,使得控制器繼 續使用前一次,也就是(k-2)h 時,傳送過來的訊息,處理後作為輸出。. B. 事件驅動模式 當節點採取事件驅動模式,會依據每一次訊息的到達,做一個立即的運算處. 理,Fig. 2.4 所示。以控制器為例,當控制器每次接收到感測器送過來的訊息時,可 能會因為感測器至控制器的這段時間延遲( τ sc )的影響,使得訊息不會是最新(newest) 的狀態,但是控制器仍會針對每次訊息的到達來執行。如(k+1)h 至(k+2)h 這段時間 區域內,雖然有兩個訊息在同一取樣時間區域內被接收到,卻不會因為兩者之中誰 最後被接受,而產生訊息拒絕的現象。. Sensor node. Controller node Actuator node. (k-3)h. (k-2)h. (k-1)h. kh. Fig. 2.4 事件驅動模式示意圖 9. (k+1)h. (k+2)h.
(18) 因此,對於一個網路型控制系統而言,控制器和制動器採用事件驅動模式會是 比較好的選擇方式。除了不會產生訊息拒絕和空取樣的情形,也因為事件驅動模式 是依據訊息的到達來做立即的處理,能減少時間延遲,不必像時間驅動模式,必須 固定在每一個取樣時間內等待感測器傳送訊息。. 2.3 取樣週期 由於網路型控制系統涉及數位/類比系統,因此當類比訊號轉為數位訊號時,需 要經由取樣,而根據取樣定理(Shannon 定理)[16]指出,如果對一個具有有限頻譜. ( − ωmax < ω < ωmax )的連續訊號進行取樣,取樣角頻率(或者說是取樣頻率 f s > 2 f max ) 應該大於被取樣訊號中有意義振幅的最高頻率兩倍以上(Fig. 2.5),才不會發生交疊. (aliasing)的現象(Fig. 2.6),使得還原的信號產生失真。所以取樣頻率必須滿足:. 2π > 2 f max T 其中 f max 為被取樣信號的最高頻率。若滿足上式,則理論上一個連續訊號能夠從它 被取樣的訊號,經過一個低通續波器而被還原回來。. f s > 2 f max Fig. 2.5 被取樣的訊號(中間)和取樣後的訊號(兩邊)無交疊. 10.
(19) f s < 2 f max Fig. 2.6 被取樣的訊號(中間)和取樣後的訊號(兩邊)交疊 取樣定理賦予選擇取樣週期的基本原則,而通常愈小的取樣週期可以使得取樣 後的系統愈接近被取樣的連續訊號系統,對於系統控制過程的訊息了解便愈多,控 制的效果也會愈好。然而,設計一個網路型控制系統時,過於頻繁的取樣會增加網 路負載和不必要的計算負擔,可能導致訊息更大的延遲或是封包遺失,影響系統控 制品質 (quality of control)。因此,選取適當的取樣時間,才會給系統帶來較好的效 能表現。因為訊息是使用網路傳送,無可避免地,仍會發生前面章節所提到的訊息 時間延遲,所以,取樣週期的選取必須考慮到時間延遲。取樣週期(T)和總延遲時間 (τ)的關係,以取樣時間大於總延遲時間(h > τ)優先考慮,關於取樣週期(T)和總延遲 時間(τ)的分析討論,將在下一章,進行數學分析時再一次被提到,其中取樣週期(T) 將會以取樣時間(h)替換,以做為之後的討論。. 11.
(20) 第三章 數學的分析. . 3.1 系統的假設設定 關於所討論的網路型控制系統,有以下幾點假設條件的設定: 假設 1:網路型控制系統的三個主要功能元件,其節點驅動模式的選取,感測器採 取時間驅動模式,控制器與制動器皆採用事件驅動模式。因此, τ cq1 和 τ aq 皆為零, 而總延遲時間為: τ = τ sc + τ ca 。. x(kh). plant. kh. (k+1)h. (k+2)h. (k+1)h. (k+2)h. (k+1)h. (k+2)h. Controller τ sc kh. Actuator τ ca. kh τ. Fig. 3.1 訊息傳遞總延遲時序圖 12.
(21) 假設 2: 取樣時間大於總延遲時間 ( h > τ )。 假設 3:由於單純/複雜的封包遺失現象分別可以適當的 Bernoulli/Markov 分佈描 述,並融入具時間延遲現象的系統描述式中,因此,設定所討論的網路型控制系統 僅考慮時間延遲因素,而系統主要時間以控制器為依據。 由假設 1 跟假設 2 可以得到訊息傳遞總延遲時序圖,Fig. 3.1。. 3.2 時間延遲的數學分析 一般來說,連續系統經過固定的取樣時間,可用(3.1)來表示離散的系統:. x((k + 1)h) = Φx(kh) + Γu(kh). (3.1). h. 其中, Φ = e Ah , Γ = ∫ e Ah Bdt ,但因為網路型控制系統存在時間延遲,所以,接下 0. 來,我們針對以下兩種情形,討論具時間延遲的連續時間狀態方程式的取樣: 取樣時間大於總延遲時間 ( h > τ ); 取樣時間小於總延遲時間 ( h < τ )。 根據[17],具輸入時間延遲的方程式可表示為:. x& (t ) = Ax(t ) + Bu(t − τ ). (3.2). 從(3.2)式中可以得到 x ( t ) = e A (t − t0 ) x ( t 0 ) +. ∫. t. t0. e A (t − s ) B u ( s − τ )d s. (3.3). 考慮取樣時間大於總延遲時間 (h > τ )的情況。對(3.3)式作離散化的處理,其中 由於 u(t)在整個取樣時間是階段常數,所以,延遲的訊號 u(t − τ ) 也會是分段式的常 數,然而因為延遲的影響,使得訊號在取樣時間內有所改變,如 Fig. 3.2 所示。. 13.
(22) u(t). t. u(t − τ ) τ. (k-1)h. kh. (k+1)h. (k+2)h. t. Fig. 3.2 訊號 u(t)及延遲訊號 u(t − τ ) 的關係 因此,(3.3)的積分被分成兩段計算:. x ( (k + 1)h ) = e A (h) x(kh) + ∫ +∫. kh + τ kh. ( k +1)h kh + τ. e A ((k +1)h-s ) Bds ⋅ u(kh). e A ((k +1)h-s ) Bds ⋅ u ( (k − 1)h ). (3.4). 令 (k+1)h-s=t,則-ds=dt,(3.4)可改寫為,. x ( (k + 1)h ) = e A (h) x(kh) − ∫ −∫. kh + τ kh. (k +1)h kh + τ. e At Bdt ⋅ u(kh). e At Bdt ⋅ u ( (k − 1)h ). (3.5). 接著,可改寫積分上下限:. x ( (k + 1)h ) = e A (h) x(kh) + ∫ +∫. h. h−τ. h−τ 0. e At Bdt ⋅ u(kh). e At Bdt ⋅ u ( (k − 1)h ). (3.6). 最後,系統可以表示成. x ( (k + 1)h ) = Φx(kh) + Γ0u(kh) + Γ1u ( (k − 1)h ) 14. (3.7).
(23) 其中 Φ = e Ah , Γ 0 = ∫. h −τ 0. e Ah Bdt , Γ1 = ∫. h h−τ. e Ah Bdt ,在(3.7)中多了 u ( (k − 1)h ) 這項,. 它代表上一個取樣時間的控制訊號,若要表示成一般狀態空間表示式,則利用 u ( (k − 1)h ) ,將(3.7)式擴充成以下的狀態空間方程式. ⎡ x((k +1)h)⎤ ⎡ Φ Γ1 ⎤ ⎢ u(kh) ⎥ = ⎢ 0 0 ⎥ ⎣ ⎦ ⎣ ⎦. ⎡ x(kh) ⎤ ⎡ Γ0 ⎤ ⎢u((k −1)h)⎥ + ⎢ I ⎥ u(kh) ⎣ ⎦ ⎣ ⎦. (3.8). u(t). u(t − dh + h − τ ′). t τ′. (kh-dh) (kh+h-dh) (kh+2h-dh) (kh+3h-dh). t. Fig. 3.3 訊號 u(t)及延遲訊號 u(t − dh + h − τ ′) 的關係 考慮另一種情況,即系統中的總延遲時間大於取樣時間( τ >h)。分析與前述近 似,但必須加上一些修正。假設. τ = (d − 1)h + τ ′. 0 ≤ τ′ ≤ 1. 代入(3.3)式中,得到 x ( t ) = e A (t − t0 ) x ( t 0 ) +. t. ∫t. e A ( t − s ) B u ( s − d h + h − τ ′ )d s. 0. (3.9). 因延遲的訊號 u( t − dh + h − τ ′) 也是分段式的常數,且因延遲的緣故,使得訊號在取 15.
(24) 樣時間內有所改變,如 Fig. 3.3 所示。因此,(3.9)的積分被分成兩段計算:. x ( (k + 1)h ) = e A (h) x(kh) + ∫ +∫. kh + 2h − dh kh + h − dh + τ ′. kh + h − dh + τ ′ A (kh + 2h − dh -s ) kh + h − dh. e. e A ( kh + 2h − dh -s) Bds ⋅ u(kh + h − dh). Bds ⋅ u(kh − dh). (3.10). 令 kh+2h-dh-s=t,則-ds=dt,(3.10)可改寫為. x ( (k + 1)h ) = e A (h) x(kh) − ∫ −∫. kh + 2h − dh kh + h − dh + τ ′. e At Bdt ⋅ u(kh + h − dh). kh + h − dh + τ ′ At kh + h − dh. e Bdt ⋅ u(kh − dh). (3.11). 接著,可改寫積分上下限,. x ( (k + 1)h ) = e A (h) x(kh) + ∫ +∫. h. h− τ′. h − τ ′ At 0. e Bdt ⋅ u(kh + h − dh). e At Bdt ⋅ u(kh − dh). (3.12). 最後,系統仍可表示成如(3.7)式一般:. x ( (k + 1)h ) = Φx(kh) + Γ0u ( (k − d + 1)h ) + Γ1u ( (k − d )h ) 其中 Φ = e Ah , Γ 0 = ∫. h − τ ′ Ah. h. 0. h−τ′. e Bdt , Γ1 = ∫. (3.13). e Ah Bdt 。比較(3.7)和(3.13)兩式可以知. 道,當 d=1,(3.13)等於(3.7)。(3.13)式可仿效(3.8)找出對應的擴增狀態空間方程式:. ⎡ x( (k +1)h) ⎤ ⎡Φ Γ Γ L 1 0 ⎢ ⎥ ⎢ ⎢u( (k − d +1)h) ⎥ ⎢ 0 0 I L ⎢ ⎥=⎢ M M M O M ⎢ ⎥ ⎢ ⎢ u(kh − h) ⎥ ⎢ 0 0 0 L ⎢ ⎥ ⎢ u(kh) ⎢⎣ ⎥⎦ ⎣ 0 0 0 L. 其對應的系統方塊示意圖,如 Fig. 3.4。. 16. 0⎤ ⎡ x(kh) ⎤ ⎡0⎤ 0⎥⎥ ⎢⎢u((k − d)h)⎥⎥ ⎢⎢0⎥⎥ ⎥ + ⎢M ⎥ u(kh) M⎥ ⎢ M ⎥⎢ ⎥ ⎢ ⎥ I⎥ ⎢u((k − 2)h) ⎥ ⎢0⎥ 0⎥⎦ ⎢⎣ u((k −1)h) ⎥⎦ ⎢⎣I ⎥⎦. (3.14).
(25) Γ0. u(kh). + z. −1. z. −1. z. −1. Γ1. u((k+1-d)h). z −1. +. u(kh-h). C. z. + Φ. Fig. 3.4 延遲時間大於取樣時間的系統方塊示意圖. 3.3 設計問題 現考慮一個受控體的狀態方程式. x& (t ) = Ax(t ) + Bu(t ). (3.15a). 其中, x(t ) ∈ R a 為系統狀態向量, u(t ) ∈ R b 為輸入訊號,若和控制器. u(kh) = − Kx(kh), k = 0,1,2,3,L. (3.15b). 透過網路連結形成一閉迴路控制系統,如 Fig. 3.5 所示。. h Plant. x& (t ) = Ax(t ) + Bu(t ). Control Network τ ca. Control Network τ sc Controller u(kh) = − Kx(kh). Fig. 3.5 網路型控制系統和網路時間延遲的迴路圖 17.
(26) Fig. 3.5 中,由於該網路型控制系統已考慮時間延遲 τ sc 和 τ ca 兩項,因此,可以將整 個系統描述改寫成:. x& (t ) = Ax(t ) + Bu(t − τ ) u ( (k − i )h ) = − Kx ( (k − i )h ) , i = 0,1,2,L. (3.16a). 把其中的 u ( (k − i )h ) = − Kx ( (k − i )h ) 代入(3.7)式得到 (3.16b):. x ( (k + 1)h ) = (Φ − Γ0 K )x(kh) − Γ1Kx ( (k -1)h ) 其中, Φ = e Ah , Γ0 = ∫. h − τ Ah. h. 0. h−τ. e Bdt , Γ1 = ∫. (3.16b). e Ah Bdt ,K 為迴授控制器增益。設計. 的目的,便是設計一個適當的 K,使得整個閉迴路系統達到漸近穩定。. H ∞ 回授設計的結合 在 H ∞ 控制中,為了能統一使用同一結構來應付各種控制問題,會使用 Fig. 3.6 的回授系統。. w. z. P u. y K. Fig. 3.6 一般化控制對象 在 Fig. 3.6 中,P 為一般化的控制對象(generalized plant),而 K 則是需要設計的 控制器,若以狀態方程式描述. x& = Ax + Bu + B 2 w z = C1x + D11u + D12 w y = C 2 x + D 21u + D 22 w. 18. (3.17).
(27) 其中,x ∈ R a 為系統狀態訊號;u ∈ R b 為控制訊號;w ∈ R q 為參考訊號或外界擾動、 感測器雜訊等的輸入; z ∈ R r 為控制輸出; y ∈ R p 為觀測輸出,做為從控制器輸入 的量。輸入跟輸出的關係可以用(3.18)來描述. ⎡ z ⎤ ⎡ P11 P12 ⎤ ⎡ w ⎤ ⎥ ⎢ ⎥ ⎢y ⎥ = ⎢P ⎣ ⎦ ⎣ 21 P22 ⎦ ⎣ u ⎦. (3.18a). u = Ky. (3.18b). 若將(3.18b)代入(3.18a),可以得到 w 到 z 的轉移函數 Tw z = F( P , K ) = ( P11 + P12 K ( I − K P22 ) − 1 P21 ). (3.19). 欲設計控制器 K,以達成某一指標的最小值,亦即,使外部輸入 w 盡量不影響控制 輸出的結果。關於 Twz 大小的標準,使用 H ∞ 範數者,為所謂的 H ∞ 控制。 結合網路型控制系統和 H ∞ 控制概念,重新考慮系統表示式. x((k + 1)h) = Φx(kh) + Γ 0u(kh) + Γ1u((k − 1)h) + B 2 w (kh) z (kh) = Cx(kh) + Dw (kh). (3.20a). 其中, x ∈ R a 代表系統狀態, u ∈ R b 代表控制訊號, w ∈ R q 代表干擾輸入, z ∈ R r 代 表控制輸出;而 Φ 、 Γ 0 、 Γ1 等矩陣如同先前的定義。使用狀態回授控制器. u(kh) = −Kx(kh) , k = 0,1,2,3,L. (3.20b). (3.20a)式可改寫成 x((k + 1)h) = (Φ − Γ 0 K )x(kh) − Γ1Kx ( (k − 1)h ) + B 2 w (kh) z (kh) = Cx(kh) + Dw (kh). (3.21). 控制器 K 的設計,必須使其滿足(3.22)式: Tw z ≤ γ , γ > 0.. 19. (3.22).
(28) 3.4 穩定度分析與控制器設計 基於系統(3.15)的討論,這一節將分別針對基本的網路型控制系統(3.16),以及 帶有外部干擾的網路型控制系統(3.20)或(3.21),討論其閉迴路系統的穩定度條件, 並提供滿足 H ∞ 性能要求之控制器的設計方法。為了方便數值模擬與計算,我們透 過將問題轉化成線性矩陣不等式(LMI)的形式加以討論。過程中會利用以下的輔助定 理 1。 輔助定理 1 (Schur Complement) [18]. Q(x),R(x)和 S(x)都是變數 x 的線性函數矩陣,Q(x)和 R(x)皆為對稱矩陣,則 ⎡ Q(x) S(x) ⎤ ⎢ T ⎥<0 ⎣S (x) R(x)⎦. 等價於. R(x) < 0, Q(x) − S(x)R−1(x)ST (x) < 0.. 或. Q(x) < 0, R(x) − ST (x)Q−1(x)S(x) < 0.. 一、考慮基本網路型控制系統 (3.15),K 是欲設計的控制器增益: 定理 1. 若存在矩陣 V、對稱矩陣 R > 0 及 S > 0,滿足線性矩陣不等式(3.23). ⎡ −R + S 0 RΦT − VTΓ0T ⎤ ⎢ ⎥ −S −VTΓ1T ⎥ < 0 0 ⎢ ⎢ΦR − Γ V −Γ V ⎥ −R 0 1 ⎢⎣ ⎦⎥. (3.23). 其中, Φ 、 Γ0 、 Γ1 為系統(3.16)已知的矩陣,則系統(3.7)可藉由 u(kh) = − Kx(kh) , 達到漸近穩定,而控制器增益 K = VR −1 。. 20.
(29) 證明: 考慮(3.16),選擇 Lyapunov 函數 V (x(kh)) = xT (kh)Px(kh) + x T ( (k − 1)h ) Qx ( (k − 1)h ) ,. 其中, P > 0, Q > 0 。那麼. ΔV (x(kh)) = V ( x ( k + 1)h ) ) − V ( x(kh) ) = xT ( (k + 1)h ) Px ( (k + 1)h ) + xT (kh)Qx(kh) − xT (kh)Px(kh) − xT ( (k − 1)h ) Qx ( (k − 1)h ) T. ⎡ x(kh) ⎤ ⎡ x(kh) ⎤ =⎢ Π⎢ ⎥ ⎥ ⎣ x ( (k − 1)h ) ⎦ ⎣ x ( (k − 1)h ) ⎦ 其中 ⎡( Φ − Γ K )T ⎤ 0 ⎥ P ⎡⎣Φ − Γ0K Π=⎢ ⎢⎣ − (Γ1K )T ⎥⎦. ⎡Q − P 0 ⎤ − Γ1K ⎤⎦ + ⎢ − Q ⎥⎦ ⎣ 0. 若 Π < 0,則 ΔV (x(kh)) < 0 ,即表示系統(3.16)滿足漸近穩定。假設不等式(3.23)成立, 令 P = R −1 , Q = PSP , K = VP ,將(3.23)前後各乘上 diag{P,P,I}後,可得到不 等式:. ⎡ −P + Q ⎢ ⎢ 0 ⎢ ⎢Φ − Γ0 K ⎣. ( Φ − Γ0 K ) T − ( Γ1K ). 0 −Q − Γ1K. 由輔助定理 1 可知,該不等式相當於 Π < 0 。. 21. − P −1. T. ⎤ ⎥ ⎥<0 ⎥ ⎥ ⎦ □.
(30) 二、考慮具外部干擾的網路型控制系統 (3.20) 或 (3.21),K 是欲設計之控制器增 益。設計適當的 K,使得系統為漸近穩定,且當狀態初始值為零時,滿足(3.22)之 H ∞ 範數性能要求。 定理 2. 針對一純量 γ > 0,若存在矩陣 V、對稱矩陣 R > 0 及 S > 0,滿足線性矩陣不等式(3.24). ⎡ −R + S 0 0 RΦT − VTΓ0T RCT ⎤ ⎢ ⎥ −S −VTΓ1T 0 0 0 ⎥ ⎢ ⎢ ⎥ 0 0 −γ 2I BT2 DT ⎥ < 0 ⎢ ⎢ΦRT − Γ V −Γ V B −R 0 ⎥ 0 1 2 ⎢ ⎥ ⎢⎣ CRT 0 D 0 −I ⎥⎦. (3.24). 其中,Φ、Γ 0、Γ1 為系統(3.20) 之已知矩陣。則系統(3.20),可藉由 u(kh) = − Kx(kh) , 達到漸近穩定,且當系統狀態初始值為零時,滿足(3.22)之 H ∞ 性能要求。此時,控 制器增益 K = VR −1 。 證明: 考慮(3.20)。當 w = 0 時,選擇 Lyapunov 函數 V (x(kh)) = xT (kh)Px(kh) + xT ( (k − 1)h ) Qx ( (k − 1)h ) ,. 其中, P > 0, Q > 0 。該系統漸近穩定條件的推導,如定理 1 所述。利用輔助定理 1 兩次,不難發現,當不等式(3.24)成立,其子矩陣. ⎡ −R + S 0 RΦT − VTΓ0T ⎤ ⎢ ⎥ T T − − 0 S V Γ ⎢ ⎥ <0 1 ⎢ T ⎥ −R ⎣⎢ΦR − Γ0V −Γ1V ⎦⎥ 成立,亦即, ΔV (x(kh)) = V ( x ( k + 1)h ) ) − V ( x(kh) ) < 0 成立,即表示系統漸近穩定。 22.
(31) 而 H ∞ 性能要求 (3.22) 相當於,在狀態初始值為零時,要求針對任意的非零向量. w ∈ L2 [0, ∞ ) ,滿足 z. JN = =. 2. ≤ γ w 2 , γ > 0 。因此,讓. N −1. ∑ ⎡⎣ z T (kh)z(kh) − γ 2 w T (kh)w (kh) ⎤⎦. k =0. N −1. ∑ ⎡⎣ z T (kh)z(kh) − γ 2 w T (kh)w (kh) + V ( x ( k + 1)h ) ) − V ( x(kh) ) ⎤⎦ + V ( x(0) ) − V ( x(Nh) ). k =0. =. N −1. ∑ ⎡⎣ z T (kh)z(kh) − γ 2 w T (kh)w (kh) + V ( x ( k + 1)h ) ) − V ( x(kh) ) ⎤⎦ − V ( x(Nh) ). k =0. ≤. N −1. ∑ ⎡⎣ z T (kh)z(kh) − γ 2 w T (kh)w (kh) + V ( x ( k + 1)h ) ) − V ( x(kh) ) ⎤⎦. k =0. ⎡ ⎡ x(kh) ⎤ T ⎡ x(kh) ⎤ ⎤ ⎥ = ∑ ⎢ ⎢⎢ x ( (k − 1)h ) ⎥⎥ Π ⎢⎢ x ( (k − 1)h ) ⎥⎥ ⎥ k =0 ⎢ ⎢ w (kh) ⎥⎦ ⎢⎣ w (kh) ⎥⎦ ⎥⎥ ⎣⎢ ⎣ ⎦ N −1 ⎢. 其中,. ⎡( Φ − Γ K )T 0 ⎢ T Π = ⎢ − ( Γ1K ) ⎢ BT2 ⎢ ⎣. CT ⎤ ⎥ P 0 Φ−Γ K ⎡ ⎤⎡ 0 ⎥ 0 ⎢ ⎥ ⎢ ⎥ ⎣0 I⎦ ⎣ C DT ⎥ ⎦. ⎡Q − P 0 0 ⎤ − Γ1K B 2 ⎤ ⎢ ⎥ +⎢ 0 −Q 0 ⎥. ⎥ 0 D⎦ ⎢ 0 0 −γ 2 I ⎥⎦ ⎣. 很明顯,若 Π < 0 ,則對任意的 N > 0 , J N < 0 成立,當然包含 J ∞ < 0 。亦即,針 對 γ > 0 ,滿足 z. 2. ≤γ w 2。. 因不等式(3.24)成立,令 P = R −1 , Q = PSP , K = VP ,將(3.24)前後各乘上 diag{P,. P,I,I,I}後,可得到不等式: ⎡ Q−P ⎢ ⎢ 0 ⎢ 0 ⎢ ⎢ ⎢Φ − Γ0K ⎢ C ⎣. 0. 0. −Q. 0. ( Φ − Γ0K ) T − ( Γ1K ). 0. −γ 2 I. BT2. − Γ1K. B2. − P −1. 0. D. 0. 由輔助定理 1 可知,此不等式相當於 Π < 0 。 23. T. CT ⎤ ⎥ 0 ⎥ ⎥ DT ⎥ < 0 ⎥ 0 ⎥ − I ⎥⎦. □.
(32) 備註 1 若 γ > 0 ,γ 不是一給定數值而為變數時,求解定理 2(3.24)式,使得 Tw z 達到最小, 此為 H ∞ 最佳化問題。基於(3.24)式,關於最佳化的問題可用以下來描述. min γ 2. γ 2 ,R ,S , V. ⎡ −R + S 0 0 RΦT − V T Γ 0T ⎢ 0 0 −S − V T Γ1T ⎢ ⎢ s.t. ⎢ 0 0 B T2 −γ 2 I ⎢ΦR T − Γ V − Γ V B −R 0 1 2 ⎢ T ⎢⎣ CR 0 D 0. RCT ⎤ ⎥ 0 ⎥ ⎥ DT ⎥ < 0 0 ⎥ ⎥ − I ⎥⎦. (3.25). 而對於上述求解 H ∞ 最佳化的問題,可以 Matlab LMI-Toolbox 所提供的 mincx 指令 來求解。. 24.
(33) 第四章 數值模擬. . 4.1 系統的數值模擬 我們使用 MATLAB Simulink 來模擬網路型控制系統,首先建立一個沒有網路 時間延遲的系統,作為和網路型控制系統的對照,以說明時間延遲對於系統性能的 影響;並將所設計的控制器加入網路型控制系統進行比較。 因 S 函式(S-function)允許使用者將自己的演算法加到 Simulink 模型中,且 S 函 式是 Simulink 運作的核心,每個方塊圖都有一個與其相同名稱的 S 函式,這也是. Simulink 在模擬與分析中相互作用的函數。在 MATLAB 的環境中,使用者也可以用 C 語言或 C++來編寫 S 函式,其形式十分通用。因此,我們使用 S 函式建立控制系 統。 數值模擬 1. ⎧ x& (t ) = Ax(t ) + Bu(t ), ⎡ 0.1 −0.8⎤ ⎡ −1⎤ 考慮系統 ⎨ 其中 A = ⎢ , B = ⎢ ⎥ , C = [1 0] 。設取 ⎥ ⎩ z (t ) = Cx(t ). ⎣ −1 0.2 ⎦ ⎣1⎦ 樣時間(h)為 0.2 秒,則系統離散化後,(3.1)中相關系統矩陣為. ⎡ 1.0367 −0.1658⎤ ⎡ −0.2195⎤ Φ=⎢ , Γ=⎢ ⎥ ⎥ ⎣ −0.2072 1.0574 ⎦ ⎣ 0.2256 ⎦ 使用 S 函式(程式碼可參照附錄)描述上述系統,配合 Simulink 的使用,完成得到. Fig.4.1。. Fig. 4.1 使用 S 函式完成的系統 25.
(34) 系統離散化前,該系統的特徵值 eig ( A) 為-0.7458 和 1.0458,因此,系統本身不 穩定。假設狀態初始值 x0 = [1 −1] ,且因網路傳遞所造成的總延遲時間(τ)為 0.15 T. ⎡ −0.1607 ⎤ ⎡ −0.0587 ⎤ , = Γ 秒,則可求出對應於(3.7)的 Γ0 及 Γ1 : Γ 0 = ⎢ 1 ⎥ ⎢ 0.0614 ⎥ 。而系統零輸 ⎣ 0.1642 ⎦ ⎣ ⎦ 入狀態響應如 Fig. 4.2。. Fig. 4.2 具時間延遲之系統零輸入狀態響應. 從上圖可知,加上了網路的總時間延遲後,這個不穩定的系統,仍是不穩定的。因 此,利用定理 1 設計使系統滿足漸近穩定的控制器。利用 Matlab LMI-Toolbox,求 解其對應的 LMI 條件(3.23),可得到對應的變數矩陣,分別為. ⎡ 0.9710 − 0.2525⎤ ⎡ 0.4352 − 0.2796 ⎤ R=⎢ ,S=⎢ ⎥ , V = [ −4.1977 4.1729] . ⎥ ⎣ −0.2796 0.4107 ⎦ ⎣ − 0.2525 0.9265⎦ 利用關係式 K = VR −1 ,得到對應的控制器增益為. K = [ −3.3923 3.5797 ] . 26.
(35) 最後,利用 Simulink 所提供的功能方塊來完成系統建立,如 Fig.4.3 所示。模擬的結 果展現於 Fig.4.4。加入該控制器後,原本不穩定的系統變成穩定的系統。. Fig. 4.3 數值模擬 1 的系統連接圖. Fig. 4.4 加入控制器後的系統零輸入狀態響應. 27.
(36) 數值模擬 2. ⎧ x& (t ) = Ax(t ) + Bu(t ) ⎡ 0 1⎤ ⎡1⎤ , B = ⎢ ⎥ , C = [1 − 1] 。其特徵 考慮系統 ⎨ 其中, A = ⎢ ⎥ ⎩ z (t ) = Cx(t ). ⎣ −8 − 6 ⎦ ⎣1⎦ 值 eig(A)為-2 和-4,系統為穩定。令取樣時間(h)為 0.2 秒,則系統離散化後對應. (3.1) 的系統矩陣為 ⎡ 0.8913 0.1105⎤ ⎡0.2056 ⎤ Φ=⎢ ,Γ=⎢ ⎥ ⎥. ⎣ −0.8840 0.2283⎦ ⎣ 0.0018⎦ 如同前例一般,使用 S 函式建立系統。考慮網路傳遞所造成的時間延遲(τ)為 0.1 秒,. ⎡ 0.1030 ⎤ ⎡ 0.1026 ⎤ 可求得(3.7)中 Γ 0 = ⎢ , Γ1 = ⎢ ⎥ ⎥ ,並利用 Simulink 提供的功能區塊完 ⎣ 0.0413⎦ ⎣ −0.0395⎦ 成該系統的建立,如 Fig. 4.5。令狀態初始值 x T0 = [1 −1] ,其輸出響應結果顯示於. Fig.4.6。. Fig. 4.5 數值模擬 2 的系統連接圖. 28.
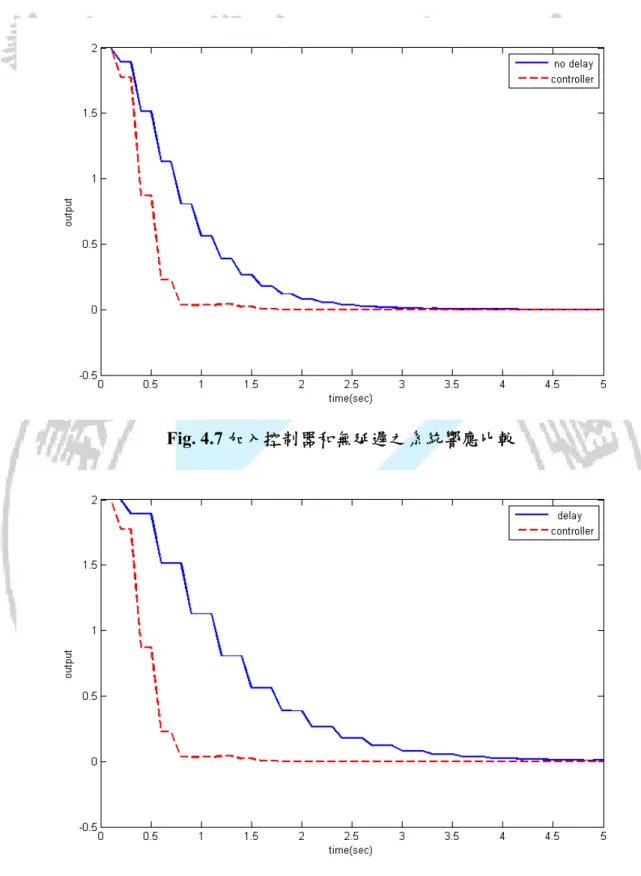
(37) Fig. 4.6 具/未具網路延遲之系統輸出. 從 Fig. 4.6 可以得知,一個穩定的系統在一定程度內的時間延遲之下,雖然仍 可以保持穩定,但是系統性能明顯會變差,因此,需要考慮設計一個控制器,以改 善時間延遲的影響。利用定理 1 設計使系統滿足漸近穩定的控制器。利用 Matlab. LMI-Toolbox,求解其對應的 LMI 條件(3.23),得到對應的變數矩陣 ⎡ 2.7513 −2.1325⎤ ⎡ 0.6997 −0.3166 ⎤ R=⎢ ,S=⎢ ⎥ , V = [ 5.6174 1.0273] . ⎥ ⎣ −0.3166 4.0456 ⎦ ⎣ −2.1325 9.4010 ⎦ 利用關係式 K = VR −1 ,得到對應的控制器增益為. K = [ 2.5800 0.6945] . 再使用 Simulink 提供的功能方塊,以完成一個含有上述控制器的網路控制系統。比 較加入控制器前後之系統響應,如 Fig.4.7 及 Fig.4.8 所示。可以發現,加入所設計 的控制器後,系統響應的穩定速度比沒有延遲,以及具有延遲但沒有控制器的系統 的穩定都來得快。. 29.
(38) Fig. 4.7 加入控制器和無延遲之系統響應比較. Fig. 4.8 時間延遲系統加入控制器前後之響應. 30.
(39) 數值模擬 3. 3⎤ ⎧ x& (t ) = Ax(t ) + Bu(t ) ⎡0 ⎡1⎤ , B = ⎢ ⎥ , C = [ 4 5] 。其特徵 考慮系統 ⎨ 其中, A = ⎢ ⎥ ⎩ z (t ) = Cx(t ). ⎣ −4 −7 ⎦ ⎣0⎦ 值 eig(A)為-4 和-5,系統是穩定的。假設取樣時間(h)為 0.2 秒,則系統離散化後,. (3.1) 對應之系統矩陣為 ⎡ 0.8473 0.2984 ⎤ ⎡ 0.1886 ⎤ Φ=⎢ , Γ=⎢ ⎥ ⎥. ⎣ −0.3979 0.1509 ⎦ ⎣ −0.0509 ⎦ 使用 S 函式建立系統,考慮網路傳遞所造成的時間延遲(τ)為 0.1 秒,可求得(3.7)中. ⎡ 0.0983 ⎤ ⎡ 0.0903 ⎤ Γ0 = ⎢ , Γ1 = ⎢ ⎥ ⎥ ,假設系統處於具有干擾的環境,且其對應於(3.20) ⎣ −0.0159 ⎦ ⎣ −0.0350 ⎦ ⎡ 0.04 ⎤ 的系統矩陣為 B 2 = ⎢ ⎥ , D = 0 。利用 Simulink 提供的功能區塊完成該系統的建 ⎣ 0.05⎦ 立,給予步階輸入,其狀態響應(狀態初始值皆為 0)如 Fig.4.9 所示。. Fig. 4.9 無干擾及無延遲時之狀態響應. 31.
(40) Fig. 4.10 有干擾及時間延遲之狀態響應 從 Fig. 4.9 及 Fig. 4.10 可獲知外部干擾與時間延遲影響系統狀態響應,因此, 可以設計一個控制器,以降低外部干擾與時間延遲對系統的影響。假設 γ =1,利用 定理 2,設計使系統滿足漸近穩定,同時滿足 H ∞ 性能要求的控制器。利用 Matlab. LMI-Toolbox,求解對應的 LMI 條件(3.24),得到對應的變數矩陣 ⎡ 9.2763 −7.3915⎤ ⎡ 2.7727 −2.2189 ⎤ R=⎢ ,S=⎢ ⎥ , V = [ 3.1598 2.6331] . ⎥ ⎣ −2.2189 1.7809 ⎦ ⎣ −7.3915 5.9141 ⎦ 利用關係式 K = VR −1 ,得到對應的控制器增益為. K = [ 3.4229 4.7232] . 完成後系統如 Fig.4.11 所示,加入此控制器前後之系統狀態響應結果,分別顯示於. Fig.4.12 和 Fig.4.13,從圖中可看出加入控制器後,狀態變數變化值變小,同時也較 快達到穩態。. 32.
(41) Fig. 4.11 數值模擬 3 的系統連接圖. Fig. 4.12 有干擾及時間延遲的 x1 狀態變數變化曲線(無控制器和有控制器). 33.
(42) Fig. 4.13 有干擾及時間延遲的 x2 狀態變數變化曲線(無控制器和有控制器) 當 γ2 為一變數,而不是一固定數值時,可重新考慮數值模擬 3 為 H ∞ 最佳化的問題。 利用(3.25)式,經由 Matlab LMI-Toolbox,以 mincx 求解對應的 LMI 條件(3.25),可 得到最佳化後之 γ = 0.5698 及對應的變數矩陣. ⎡ 0.0497 −0.0220 ⎤ ⎡ 0.0092 −0.0031⎤ R=⎢ ,S=⎢ ⎥ , V = [ 0.0997 ⎥ ⎣ −0.0031 0.0076 ⎦ ⎣ −0.0220 0.0277 ⎦. 0.0640] .. 利用關係式 K = VR −1 ,得到對應最佳化控制器增益:. K = [ 4.6847 6.0364] . 相關結果顯示於 Fig.4.14 和 Fig.4.15,從圖中可比較出 γ=1 及最佳的 γ,其狀態變數 變化值的差別。. 34.
(43) Fig. 4.14 有干擾及時間延遲的 x1 狀態變數變化曲線(不同的 γ). Fig. 4.15 有干擾及時間延遲的 x2 狀態變數變化曲線(不同的 γ). 35.
(44) 第五章 結論 . 5.1 討論 第四章數值模擬結果,可以當成第三章所推論數學式對於一個網路型控制系統 設計的驗證。在本論文中,對於網路型控制系統的時間延遲討論,僅以取樣時間大 於總延遲時間( h > τ )的狀況作為分析的前提,從第四章的數值模擬中,可知有不錯 的成果。當面臨延遲時間可能會大於已設定好的取樣時間( τ < h)時,第三章也曾經 提到相關的分析。可以補充的是,延遲時間會增加狀態矩陣的維數(dimension),而 增加的維數可由下式取最小整數判斷[20]。. n≥. τ h. 例如,取樣時間大於延遲時間,則 n = 1。因此,延遲時間大於取樣時間會使得系統 複雜化,對於穩定性的分析條件也會更加困難,若是要處理這一類的問題,建議可 以先做 MADB (maximum allowable delay bond )或者稱作 MATI(maximum allowable. transfer interval)分析[19],確定系統時間延遲的上限,如此一來可以在不違反取樣定 理情況下,選擇適當的取樣時間,使得大於延遲時間,讓先前的分析設計仍可繼續 沿用且保證網路控制系統的穩定性。. 5.2 未來方向 本研究未來可行的研究方向,概可分成幾個方向來進行:. (1) 對於網路控制系統的兩個主要議題,時間延遲和封包遺失上,進行更多的討論。 由於封包遺失是發生在網路傳送接收的階段,除了可以透過選用合適的協定,來減 低這樣的情形外,同時可以在設計的階段時,作為一個項目被考慮進去;在時間延 遲方面上,基於本論文所推出的結果,可再考慮其它的情形,例如,系統存在著不 確定的參數時,同時在穩定性分析階段上,結合 MADB,在選擇 Lyapunov 函數時, 為了能得到更好的非保守性的結果,可配合新的假設、條件、狀態等,運用已知的 36.
(45) 數學理論,形成 LMI 的問題,藉由求解 LMI 來引導出非保守狀態下的結果,例如 與時間延遲相依的穩定條件等議題。. (2) 利用文獻 [3] 所提供的概念,將兩台電腦分別當作為受控體和控制器,利用 MATLAB 進行數值計算,透過 C++撰寫的程式,和網路連結,接收相關的參數設定 及資訊(如圖 Fig.5.1),形成一個即時的網路控制系統。. plant computer plant computation (MATLAB) activeX automation plant (C++ program). controller (C++ program) activeX automation controller computation (MATLAB) controller computer. Fig. 5.1 系統示意圖 [3] 在兩台以上的電腦彼此通訊方面上,選擇使用頻寬大的網路來連結,傳輸協定 則是使用傳輸控制協定(Transmission Control Protocol,TCP),和 UDP 相比,TCP 屬於連接導向,能做流量控制和阻塞管理,以及對遺失的封包進行重傳等,提供了 較高的可靠度。未來,將可從這個實驗中,了解真實網路傳輸的情形,同時也可將. 37.
(46) 前面章節的所設計的控制器放入,並觀察其輸出結果,與電腦模擬結果相互比較, 可作為往後階段的參考及修正。. (3) 使用具有網路功能的可程式控制器(PLC)來控制實際元件,它們可以稱為網路型 可程式控制器,如 FESTO 的 PLC (Fig.5.2) 所能提供的網路功能。只要給予正確的. IP,就能透過 IP 位址遠端下載和監控遠端。同時利用網路和集線器做資料的擷取形 成分散式的控制;可以和其他軟體(如 EXCEL)或是多台 PLC 透過網路作動態資料交 換(DDE)。. Fig. 5.2 FC660 圖像. 總結來說,網路已經在人們生活之中佔有很大的部份,同時隨著通訊科的日益 月新,近年來所發展的無線網路,使得網路使用更加便利、容易,關於無線網路運 用與控制的相關議題,預期也將會是可見的未來,國內外學者研究的重點。. 38.
(47) 参考文獻 [1] L. Wei , D-Y. Xue and D-Z. E ,“Some basic issue in networked control systems,” 2nd IEEE Conference on Industrial Electronics and Applications, ICIEA’07, Harbin, China, 2007, pp. 101–105.. [2] Z.H. Huo, H. Fang, and C. Ma,“Networked control system: state of the art,” Fifth World Congress Intelligent Control and Automation, WCICA’04., Hangzhou, China, 2004, pp.1319–1322.. [3] W. Zhang, M. S. Branicky, and S. M. Phillips , “Stability of networked control systems,” IEEE Control Systems Magazine, vol. 21, pp. 84–99, 2001.. [4] Z. Chen, L. Liu, and J. Zhang ,“Observer based networked control systems with network-induced time delay,” IEEE International Conference on Systems, Man and Cybernetics, ICSMC '04, Tianjin Univ. of Technol., China, 2004, pp. 3333–3336.. [5] Y. Zhang, Q. Zhong, and L. Wei,“Stability of networked control systems with communication constraints, " Chinese Control and Decision Conference, CCDC '08, Beijing, China, 2008, pp.335–339.. [6] F. Xia, Z. Wang, and Y. Sun,“Design and evaluation of event-driven networked real time control systems with IEC function blocks," IEEE International Conference on Systems, Man and Cybernetics, ICSMC '04, Hangzhou, China, 2004, pp. 5418–5153.. [7] Z. Qixin, H. Liu, S. Chen, and S. Hu, “Exponential stability of networked control systems with short time delay," 27th Chinese Control Conference, CCC’08, Kunming, China, 2008, pp. 316–319.. [8] J. Wu, Q. Zhu, G. Lu, and S. Hu,“The output feedback control of deterministic networked control systems," Fifth World Congress Intelligent Control and Automation, WCICA’04, Hangzhou, China, 2004, pp. 1334–1337.. 39.
(48) [9] Z. Li and Y.C. Pan, “Robust controller design for a class of networked control systems," 27th Chinese Control Conference, CCC’08., Kunming, China, 2008, pp. 541–544.. [10] X. Liu and H. Xu,“Stability analysis of networked control system," Fifth World Congress Intelligent Control and Automation, WCICA’04., Hangzhou, China, 2004, pp. 1316–1318.. [11] L. S. Hu, T. Bai, P. Shi and Z. Wu,“Sampled-data control of networked linear control systems," Automatica, vol. 43, pp. 903–911, 2007.. [12] W.-A. Zhang and L. Yu, “New approach to stabilization of networked control systems with time-varying delays," IET Control Theory & Applications, vol. 2, pp. 1094–1104, 2008.. [13] Y. Sun and J. Xu, “Stability analysis and controller design for networked control 9th International Conference Electronic. systems with random time delay, ". Measurement & Instruments, ICEMI '09., Beijing, China, 2009, pp. 3-136-3-141.. [14] G. R. Matías and A. Barreiro, “Analysis of networked control systems with drops and variable delays,” Automatica, vol.43, pp. 2054-2059, 2007.. [15] D. L. Wen and G. H. Yang , “Stability analysis and controller design for Networked Control Systems," Chinese Control and Decision Conference, CCDC '09. Guilin, China, 2009, pp. 510–514.. [16] C. E. Shannon, “Communication in the presence of noise,” Proc. Institute of Radio Engineers, vol. 37, pp. 10-21, 1949.. [17] K.J. Àström and Wittemark, Computer Controlled System, Theory and Design, Prentice-Hall, Englewood Cliffs, N.J., 1984.. [18] S. P. Bord, L. Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix Inequalities in System and Theory, SIAM, Philadelphia, 1994. 40.
(49) [19] J. Sun, G. P. Liu, and J. S. Chen,“State feedback stabilization of networked control systems," 27th Chinese Control Conference, CCC’08., Kunming, China, 2008, pp. 457–461.. [20] 李宜達,控制系統設計與模擬,全華科技圖書股份有限公司,台北市,2004. [21] S.H. Bi, C.C. Gao, and Q.F. Ren, “State feedback H-infinity control of discrete singular systems with state and input Delays,"Chinese Control Conference, CCC’06., Harbin, China, 2006, pp. 688 – 692. [22] J.B. Burl, Linear optimal control/ H2 and H∞ methods, Addison-Wesley, Menlo Park, Calif., 1999.. 41.
(50) 附錄 數值模擬 1. S 函式程式碼 function [sys,x0,str,ts] = dsone(t,x,u,flag) ad=[1.0367. -0.1658 ;-0.2072. 1.0574];. bd=[-0.2195 ; 0.2256]; Cd=[1 0]; switch flag, case 0, [sys,x0,str,ts]=mdlInitializeSizes(ad,bd,c); case 2, sys=mdlUpdate(t,x,u,ad,bd,c); case 3, sys=mdlOutputs(t,x,u,ad,bd,c); case {1,4,9}, sys=[] otherwise DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag)); sys=[]; end function [sys,x0,str,ts]=mdlInitializeSizes(ad,bd,c) sizes = simsizes; sizes.NumContStates = 0; sizes.NumDiscStates = 2; sizes.NumOutputs. = 1;. sizes.NumInputs. = 1;. sizes.DirFeedthrough = 0; 42.
(51) sizes.NumSampleTimes = 1; sys = simsizes(sizes); x0=[1 ; -1] str = []; ts = [0.2 0]; function sys=mdlUpdate(t,x,u,ad,bd,c) sys = ad*x+bd*u; function sys=mdlOutputs(t,x,u,ad,bd,c) sys=c*x;. 43.
(52)
數據




+7





Outline
相關文件
When? Where? What? A Real-Time System for Detecting and Tracking People.’’ Proc. International Conference on Face and Gesture Recognotion, April, pp. Pentland, “Pfinder:
[16] Goto, M., “A Robust Predominant-F0 Estimation Method for Real-time Detection of Melody and Bass Lines in CD Recordings,” Proceedings of the 2000 IEEE International Conference
LAN MAN Standards Committee of the IEEE Computer Society(1999), “ Wireless LAN Medium Access Control(MAC) and Physical Layer(PHY) Specifications,” International Standard ISO/IEC
Chen, “Adjustable gamma correction circuit for TFT LCD,” IEEE International Symposium on Circuits and Systems, vol. Kan, “Implementation of the Gamma (γ) Line System Similar
Li, The application of Bayesian optimization and classifier systems in nurse scheduling, in: Proceedings of the 8th International Conference on Parallel Problem Solving
Plumbley, “Beat Tracking with a Two State Model,” IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2005), vol. Honing, “Computational
Gu, “Corner Block List: An Effective and Efficient Topological Representation of Nonslicing Floorplan,” IEEE/ACM International Conference on Computer-Aided Design, pp.8–12,
[3] Ke Xiaolong, “Study on Software and Hardware Control of High-precision Measurement Platform for Optical Aspheric Surface”, 2009 IEEE International Conference on
