國立交通大學
資訊科學與工程研究所
碩 士 論 文
利用動態二進制轉譯技術
改善微架構內快取記憶體模擬:個案研究
Using DBT (Dynamic Binary Translation)
to improve performance of micro-architecture’s cache
simulations: a case study
研 究 生:陳君彥
指導教授:徐慰中 教授
利用動態二進制轉譯技術改善微架構內快取記憶體模擬:個案研究
Using DBT (Dynamic Binary Translation)
to improve performance of micro-architecture’s cache
simulations: a case study
研 究 生:陳君彥 Student:Chun-Yen Chen
指導教授:徐慰中 博士 Advisor:Dr. Wei-Chung Hsu
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A Thesis
Submitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
May 2013
Hsinchu, Taiwan, Republic of China
i
利用動態二進制轉譯技術
改善微架構內快取記憶體模擬:個案研究
研究生:陳君彥
指導教授:徐慰中博士
國 立 交 通 大 學 資 訊 科 學 與 工 程 研 究 所 碩 士 班
摘
要
本篇論文是透過動態二進制轉譯相關技術嘗試改良微架構內快取記憶體模 擬之機制。有鑑於快取記憶體在微架構模擬中影響效能的權重,此實驗將關注在 如何改善其效能。其中將修改 SimpleScalar 並透過此一平台進行實驗。當測試 的程式,例如迴圈等重複執行且內含許多需存取記憶體的指令時,其中會產生許 多不必要的快取記憶體模擬。經由本實驗設計的方法,可偵測並進一步減少快取 記憶體模擬的次數以使整體效能提升。實驗結果顯示,改良後的 SimpleScalar 在執行快取記體憶模擬時的平均時間比起原本快上了 3.4~3.9 倍
ii
Using DBT (Dynamic Binary Translation)
to improve performance of micro-architecture’s cache
simulations: a case study
Student: Chun-Yen Chen
Advisor: Dr. Wei-Chung Hsu
Degree Program of Computer Science
National Chiao Tung University
ABSTRACT
This thesis uses DBT techniques to improve the performance of
micro-architecture’s cache mechanism. This study will focus on how to improve
cache simulation’s performance due to the cache importance in micro-architecture
simulations. We modified the SimpleScalar and ran the experiment on it. When
running the test codes with many memory reference instructions, such as loops,
repeatedly, there are many redundant cache simulations. By our experiment method,
these redundancies will be detected and the times of cache simulations will be
reduced. With the enhancement and associated optimization, we have observed
iii
誌
謝
感謝指導教授-徐慰中教授,給予我指導與幫助,從老師身上學到很多。不 僅是知識方面,最重要的是風範令人景仰。感謝口試委員:單智君教授、吳真貞 教授、楊武教授,在口試時,指明了學生在做研究時沒想清楚的部份以及寫作的 問題,讓我了解自己在研究上還有許多可改善的空間。 感謝實驗室詹雅淇、李柏舉同學,有他們的打氣和陪伴是一件很幸福的事。 感謝歐冠翬同學,在我遇到問題時,給了我許多的建議及幫助。感謝實驗室的大 家,真的覺得一起努力的感覺很棒。另外,感謝在口試當天幫忙的學弟劉冠宏、 傅勝余,使得口試得以進行得相當順利、流暢。 感謝交大資工系羽的學弟妹們,給了我很大的精神支撐,在這最後的一年, 謝謝你們。最後,謝謝家人的信任及鼓勵,還有情同兄弟的好室友黃致遠及莊柏 毅。
陳君彥
2013/05/17 NCTU (Lab. 446A)iv
Table of Contents
摘 要... i ABSTRACT ... ii 誌 謝... iii Table of Contents ... iv List of Tables ... viList of Figures ... vii
I. Introduction ... 1 Motivating Example... 4 II. Background ... 9 2.1 Interpretation ... 9 2.2 Binary Translation ... 9 2.3 Micro-architecture Simulator ... 10 2.4 SimpleScalar ... 10
2.4.1 Sim-fast and sim-safe ... 13
2.4.2 Sim-profile ... 13
2.4.3 Sim-cache ... 14
2.4.4 Sim-outorder ... 15
III. Design and Implementation ... 18
3.1 Design Issues ... 18
3.2 Modify Cache Simulation Mechanism ... 19
3.3 Merge The Cache Simulations In The Same Cache ... 19
3.4 Address Overlapping Problem of Load/Store Instructions ... 23
IV. Experiments and Results ... 25
4.1 Experimental Environment ... 25 4.2 Case Studies ... 26 4.2.1 Array Addition ... 26 4.2.2 Memory Copy ... 26 4.2.3 Comparison ... 27 4.2.4 Linear Search ... 28 4.2.5 Bubble Sort ... 29 4.3 Preliminary Results ... 30
4.3.1 Array Initialization Problem ... 31
v
Cache miss rate ... 38 V. Conclusion and Future Work... 40 Reference ... 42
vi
List of Tables
Table 1 Code size of main functions in sim-outorder simulator ... 7
Table 2 Main components of SimpleScalar’s performance core ... 12
Table 3. Additional arguments of sim-cache level ... 14
Table 4 Read time of data cache simulation (in the main loop) ... 30
Table 5 Write time of data cache simulation (in the main loop) ... 30
Table 6 Read time of data cache simulation (Total) ... 31
vii
List of Figures
Figure 1 A simple C code example ... 5
Figure 2 Translated instructions: Interpreter vs. Micro-architecture
simulator (Add instruction with cache simulation only) ... 6
Figure 3 Code expansion problem ... 7
Figure 4 Simplescalar’s structure... 11
Figure 5 Simplescalar’s simulation levels ... 12
Figure 6 Set the cache hierarchy ... 15
Figure 7 Pipeline for sim-outorder ... 16
Figure 8 Code structure in sim-outorder ... 17
Figure 9 Execution flow of simplescalar ... 18
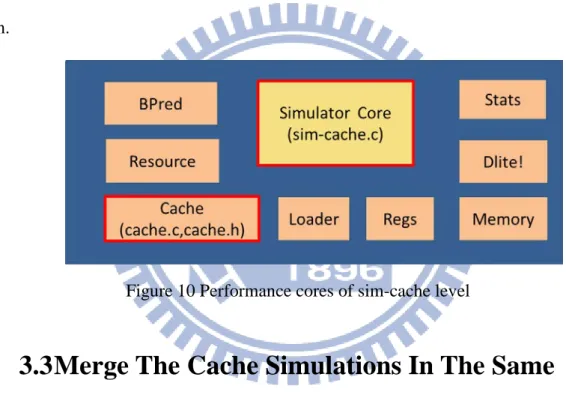
Figure 10 Performance cores of sim-cache level ... 19
Figure 11 The flowchart of implementation ... 20
Figure 12 Loop unrolling ... 21
Figure 13 Original implementation of instruction execution ... 22
Figure 14Modified implementation of instruction execution ... 23
Figure 15 Cache line’s status ... 23
Figure 16 Using clock gettime function to get the time of program
execution ... 25
Figure 17 Case: Array Addition ... 26
Figure 18 Case: Memory Copy ... 27
Figure 20 Case: Linear search ... 28
Figure 21 Case: Bubble Sort ... 29
Figure 22 code sequence of array initialization ... 32
Figure 23 Case : Array Addition (with default configuration of L1 data
cache) ... 33
Figure 24 Case : Memory Copy (with default configuration of L1 data
cache) ... 34
Figure 25 Case : Comparison (with default configuration of L1 data cache)
... 35
Figure 26 Case : Linear Search (with default configuration of L1 data
cache) ... 36
Figure 27 Case : Bubble Sort (with default configuration of L1 data cache)
... 37
viii
Figure 29 Data cache miss rate (Modified) ... 39
Figure 30 Example: Pipeline stages ... 40
1
I.
Introduction
In the computer engineering field, new ideas are often evaluated and verified by
simulations before actual implementations. A micro-architecture simulator simulates
the detailed implementations of a computer system implementation such as the
processor, the memory hierarchy, and sometimes, the memory interconnections and
buses. In the design of micro-architecture, simulations are frequently used to predict
the performance and tradeoffs are often made to fine tune the design. This process has
been very effective in reducing the cost of design, increasing the reliability and
performance of the implementation. In micro-architecture simulations, performance
critical components such as caches, register modules, out-of-order instruction issue
mechanisms, re-order buffers, branch predictors, load/store buffers are often modeled
in details. Usually, the more implementation details modeled, the more accurate the
predictions, but the slower the simulations. With all micro-architecture modules, the
cache hierarchy is one of the most importance, since it is not only performance critical,
but also frequently invoked by every memory reference instruction during the
program execution.
Traditional cache simulations are usually based on interpretation. It means that
each is interpreted and the memory operation involved is going through the cache
2
slow. Over the past many years, JIT(Just-In-Time Translation) techniques [1] have
been used to speed up the interpretation of bytecode, and DBT(Dynamic Binary
Translation) techniques have been adopted to speed up interpretation of executables
[2]. It is quite natural to question why such techniques were not used for speeding up
micro-architecture simulations.
This thesis investigates how DBT techniques may be used for fast
micro-architecture simulations. We started from cache simulations, but the idea could
be extended to other micro-architecture simulations such as the pipeline simulations
and the load/store buffer simulations. Although DBT is not a new technology, but it
has not been used effectively on micro-architecture simulations. DBT has been quite
successfully applied for function simulation, for example, most high performance
functional simulators, such as QEMU, Simics, Shade and so on, are based on DBT.
DBT turns interpretation into native code execution, for example, instead of
interpreting an “ADD” instruction, DBT translate this ADD instruction to an
equivalent native add instruction on the host machine, and the execution of this “ADD”
instruction is now emulated by executing the translated native instruction instead of
the slow process of interpretation. Translation needs to be done only once, since the
translated code will be stored in a code cache so that subsequent execution of the
3
applied to micro-architecture simulations, one challenge might emerge.
Micro-architecture simulations often involve lots of details to emulate. Those details
are often coded as functions and are called when the activities are involved in one
instruction emulation. If we translate all these activities into native code, the degree of
code expansion may degrade the simulation speed instead of making it go faster. We
will further discuss this impact in next paragraph and use some experimental data to
support this point. To avoid this code expansion dilemma, this study chooses a
selected area to apply the idea of DBT on micro-architecture simulation. In this study,
the simulation goes through the same components many times, for example, each
memory operation will call the cache simulator. We propose to have the dynamic
translator chooses some critical blocks of these components, applies optimizations to
get rid of redundancies, converts the selected blocks to native instructions, and stores
the translated code in the code cache for subsequent simulations.
There are significant redundancies exist among multiple load/store instructions.
Due to spatial locality, multiple load/stores are likely reference data located on the
same cache line. Instead of calling the cache simulation multiple times, the simulation
activities might be combined into one transaction. This is particularly useful for
frequently executed loops. According to the fact mentioned above, the DBT could
4
activities.
Before starting our work, a proper platform must be chosen. Simplescalar is a
well-known open source computer architecture/micro-architecture simulator, and it is
a set of tools that model a virtual computer system with CPU, caches and a memory
hierarchy. In year 2000, more than one third of all papers published in top computer
architecture conferences used the SimpleScalar tool sets to evaluate their designs. [3]
That is why we choose it for the investigation study.
The purpose of this study is to come up with a method for identifying these
redundancies and let a DBT to eliminate such redundancies via code transformations.
By eliminating the redundancies, the total time of data cache simulation, in this study,
would be decreased. We believe the same idea could also be applied to other
micro-architecture simulations. In our study, we modified the original sim-cache
simulator to include our proposed approach. Unmodified code will run as before, and
modified code will be executed as if the DBT has applied the transformation and
perform merged cache simulations.
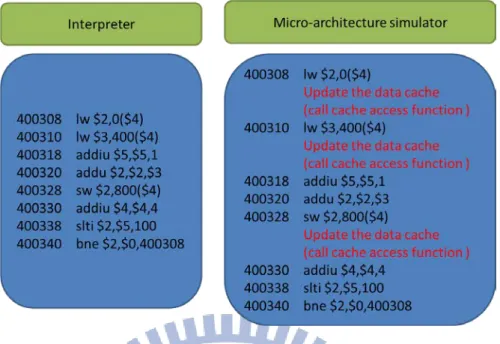
Motivating Example
In this paragraph, we will use real examples to point out the differences between
translating guest instructions to host instructions by interpretation or by DBT on
5
Use a short and simple code as example, as shown in Figure 1.
Figure 1 A simple C code example
In Figure 1, there are some arithmetic instructions in a loop. When we use
interpretation to emulate, the ADD and MUL instruction are emulated as a sequence
of instructions respectively, as shown in Figure 2. If we choose DBT to do the
emulation, the ADD and MUL instruction could be converted to native code, as
sample as one single native instruction, so the number of executed instructions in
emulation is much less than interpretation. Although the DBT is an effective way to
do emulation, but the speedup may not be realized when applied to micro-architecture
simulations. The reason is that micro-architecture simulators are not only translate
code like interpretation, but require many instructions to do the cache simulation,
6
Figure 2 Translated instructions: Interpreter vs. Micro-architecture simulator (Add
instruction with cache simulation only)
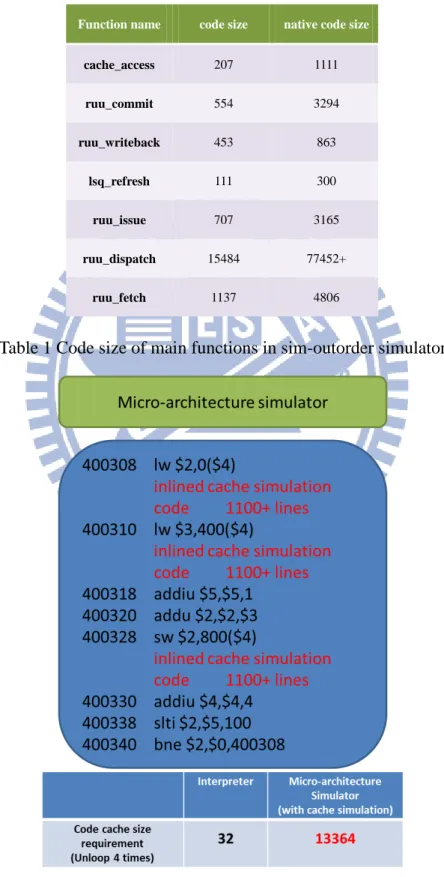
Code expansion problem
If we inline these function calls, the code expansion may slow down the program,
and the performance of simulation may be even less than the original one. Table 1
shows the code size of these functions. Even though the source C code is simple and
short, the translated code size of these functions is large. Based on this data, we take
Figure 2 and Figure 3 as examples; the number of instructions of micro-architecture
simulation (with cache simulation only) is about 3300 (according to Table1, each
cache access function translated to 1111 native instructions), it’s more than translated
code in interpretation. When the number of iteration is 100, the translated code size of
micro-architecture simulation with inlined cache simulation are much larger than
7
binary translation to translate the source instructions with native instructions, its
performance may be worse than original one.
Table 1 Code size of main functions in sim-outorder simulator
Figure 3 Code expansion problem
Function name code size native code size
cache_access 207 1111 ruu_commit 554 3294 ruu_writeback 453 863 lsq_refresh 111 300 ruu_issue 707 3165 ruu_dispatch 15484 77452+ ruu_fetch 1137 4806
8
In conclusion, instead of inline these functions, the better way to improve the
performance of micro-architecture simulation is to reduce the times of function calls.
Therefore, find a proper function to improve is important. Cache simulation is easier
and more potential than other functions to optimize.
The remainder of this thesis is as follows. In Chapter 2, we introduce the
background of this work. Chapter 3 shows the design and implementation of merged
cache simulations. In Chapter 4, we evaluate the performance of our design and
discuss the correctness and applicability of this approach. Chapter 5 summaries and
9
II. Background
In this chapter, we will introduce some important terms, which we could realize
and know their meanings in the following chapter. First, we discuss the translation
techniques between different ISAs and then explain what a micro-architecture
simulator need to do.
2.1 Interpretation
Interpretation is a straightforward emulation way. When a simulator uses
interpreter way from ISA1 to ISA2, it requires tens of native instructions to emulate
the execution of each source instructions.
2.2 Binary Translation
Binary Translation is a better way in emulation than interpretation, which makes
better performance during the translation. The reason is that binary translation
converts blocks of source instructions to native instructions and then stores these
native instructions in specific cache. Once the instructions are translated, we could use
and execute them repeatedly without doing the same translation again, it’s faster than
interpretation
There are two main types of binary translation, static and dynamic. Static binary
translation converts the guest binary code into code that runs on the target architecture
10
and code location problems. But, it can avoid some translation overhead at runtime.
Dynamic binary translation (DBT) takes a short sequence of code and then
translates it and caches the resulting sequence at runtime. Even though the overhead
of translation code is expensive, it significantly reduces the times of translation since
we can use the translated code in code cache repeatedly.
2.3 Micro-architecture Simulator
Differ with functional simulator, a micro-architecture simulator not only maintain
the program’s correctness but also go through the cache and use pipeline mechanism,
just like run a program in a true hardware environment. Therefore, the
micro-architecture simulator is more sophisticated than functional simulator and
implements more detail, so we need consider more problems if we want to modify it.
2.4 SimpleScalar
SimpleScalar is an open source micro-architecture simulator developed by Todd
Austin, which is a set of tools that model a virtual computer system with CPU, cache
and memory hierarchy. The early versions of tool set included contributions by Doug
Burger and Guri Sohi. [4] Today, SimpleScalar is developed and supported by
11
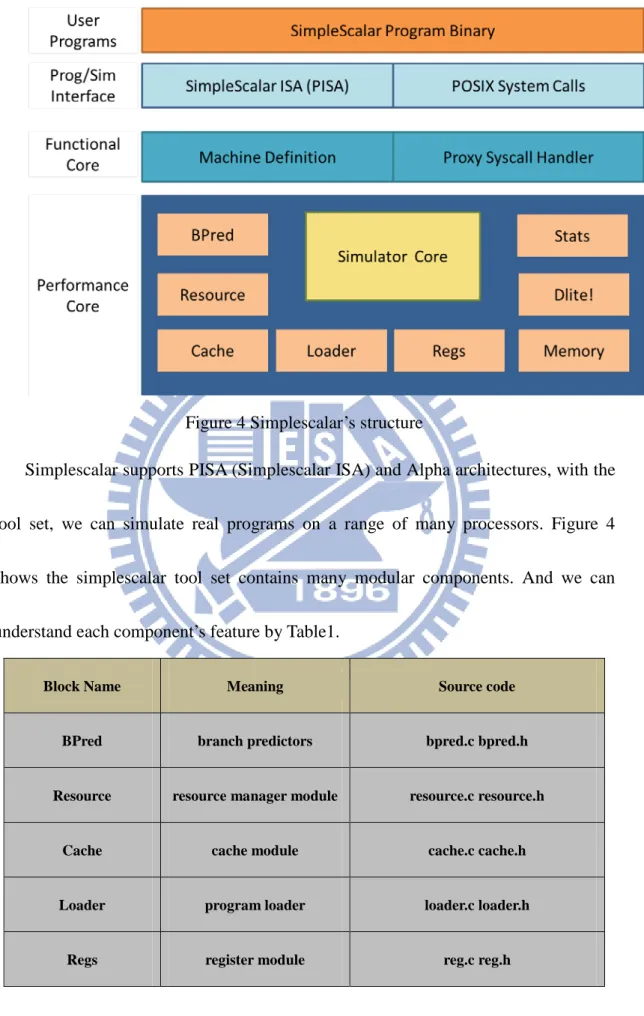
Figure 4 Simplescalar’s structure
Simplescalar supports PISA (Simplescalar ISA) and Alpha architectures, with the
tool set, we can simulate real programs on a range of many processors. Figure 4
shows the simplescalar tool set contains many modular components. And we can
understand each component’s feature by Table1.
Block Name Meaning Source code
BPred branch predictors bpred.c bpred.h
Resource resource manager module resource.c resource.h
Cache cache module cache.c cache.h
Loader program loader loader.c loader.h
12
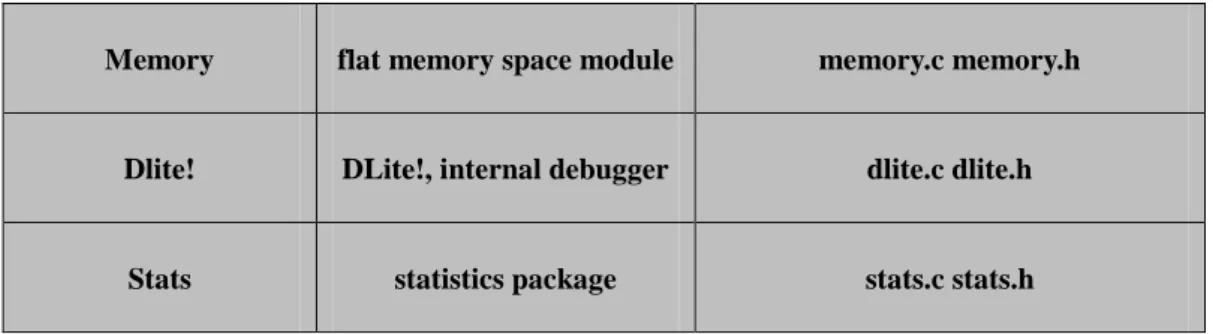
Memory flat memory space module memory.c memory.h
Dlite! DLite!, internal debugger dlite.c dlite.h
Stats statistics package stats.c stats.h
Table 2 Main components of SimpleScalar’s performance core
The above mentioned are lower layer (component layer) of simulator’s structure.
Now we introduce upper layer (simulator layer) of simulators. There are five levels in
Figure 5. It’s a trade-off between performance and detail. Each simulation level needs
corresponding performance core’s components to support it. In the following lines, we
will further describe the details of each simulation model.
13
2.4.1 Sim-fast and sim-safe
The sim-fast level resides in sim-fast.c .It executes each instruction serially.
Sim-fast is optimized for speed, and assumes no cache, instruction checking, and
doesn’t support for DLite!. DLite! is an internal in SimpleScalar tool set, which is a
lightweight debugger and could help us to trace the code structure.
Sim-safe is another version of sim-fast, and it also simulates functional
simulation, but checks for correct alignment and access permissions for each memory
reference. These two simulators cannot accept any additional command-line
arguments; both versions are very simple, therefore they are good starting points for
us to understand the internal works of the simulators.
2.4.2 Sim-profile
Just like its name, sim-profile can generate detailed program profiles on
instruction classes and addresses, text symbols, memory accesses, branches, and data
segment symbols. There are some extra options to show many different kinds of
profile information. For example, if we type the “-taddrprof” command-line argument
additionally, the terminal will show the execution profile by text address. In addition,
14
2.4.3 Sim-cache
Sim-cache is an ideal for fast simulation of cache and it generates one- and
two-level cache hierarchy statistics and profiles. In addition to universal arguments,
sim-cache accepts the arguments in Table3. The cache size is the product of <nsets>,
Table 3. Additional arguments of sim-cache level
Argument’s name Meaning
-cache:dl1/dl2 <config> level 1 / 2 data cache configuration
-cache:il1/il2 <config> level 1 instruction cache configuration
-tlb:dtlb <config> data TLB configuration
-tlb:itlb <config> instruction TLB configuration
-flush <config> flush caches on system calls
- icompress remaps 64-bit inst address to 32-bit equivalent
-pcstat <stat> record statistic<stat> by text address
<config> <name>:<nsets>:<bsize>:<assoc>:<repl>
<name> cache name
<nsets> number of sets
<bsize> block size
<assoc> associativity(number of “ways”)
15
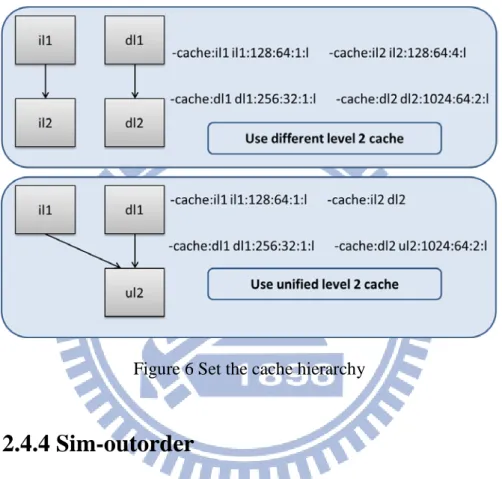
<bsize>, and<assoc>. As an example, “-cache:il1 il1:1024:32:2:l” will set a
2-way associative, 64K byte, level-1 instruction cache which uses LRU replacement
policy. To have a unified level in the hierarchy, “point” the instruction cache to the
name of the data cache in the corresponding level, as shown in Figure 6.
Figure 6 Set the cache hierarchy
2.4.4 Sim-outorder
Sim-outorder is the most complicated and detailed simulator, the main code file is
about 4000 lines. This simulator supports out-of-order issue and execution, based on
the Register Update Unit. The RUU renames the registers and hold the results, then
retires completed instructions in program order in each cycle. This simulator also uses
a load/store queue (LSQ unit). If the store is speculative, the values of store are placed
16
previous stores are known. Otherwise, it may generate cache misses.
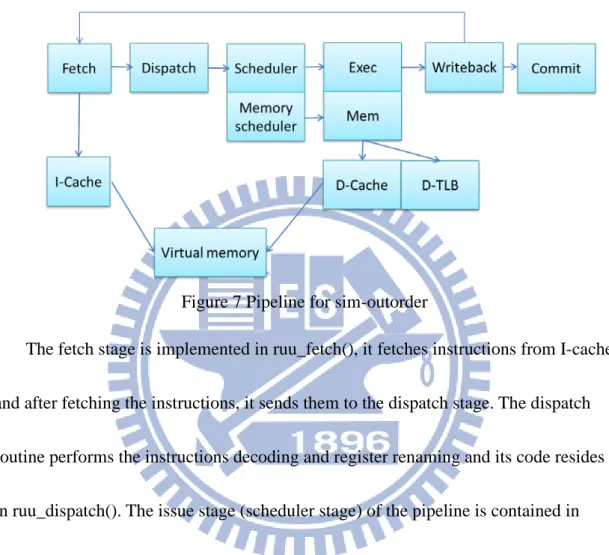
Figure 7 shows the pipeline of sim-outorder, there are six main stages for which
are fetch, dispatch, issue, execute, writeback and commit.
Figure 7 Pipeline for sim-outorder
The fetch stage is implemented in ruu_fetch(), it fetches instructions from I-cache
and after fetching the instructions, it sends them to the dispatch stage. The dispatch
routine performs the instructions decoding and register renaming and its code resides
in ruu_dispatch(). The issue stage (scheduler stage) of the pipeline is contained in
ruu_issue() and lsq_refresh(). These functions issue instruction to the functional units,
tracking register and memory dependencies. The execute stage is also maintained in
ruu_issue(). The routine receives as many ready instructions as possible from last
stage, and schedules writeback events by using the latency of the functional units. The
writeback stage is contained in ruu_writeback(), and it scans the event queue. When
17
instruction outputs to mark instructions that are dependent on the completed
instruction. This routine makes the dependent instruction as ready to issued when it
only waiting the completion. The ruu_commit() routine handles the instructions from
writeback stage that are ready to commit. It does committing instructions, updating of
the data caches and handling date TLB miss. When an instruction is committed, its
result is placed to the architected register file, and the RUU and LSQ states must be
updated.
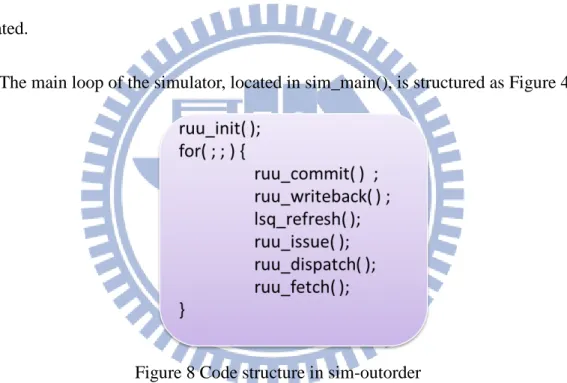
The main loop of the simulator, located in sim_main(), is structured as Figure 4.
Figure 8 Code structure in sim-outorder
As shown in Figure 8, the pipeline is executed reversely. By this method, the
18
III. Design and Implementation
3.1 Design Issues
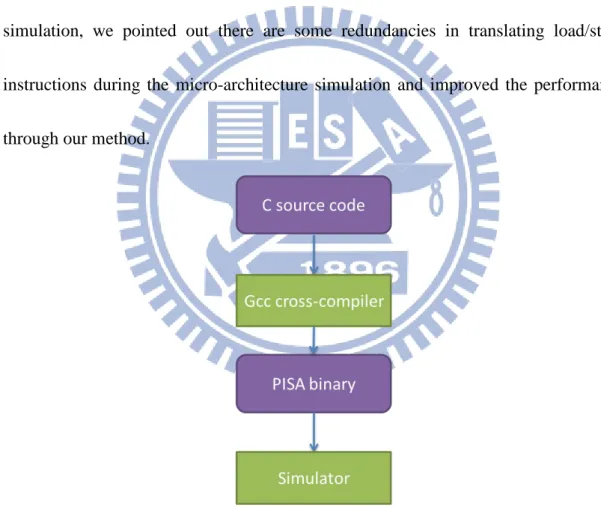
As shown in Figure 9, if we want to run a program in SimpleScalar’s instruction
set, it must be compiled to PISA binary first. Then the simulator can run this binary
code to help us analysis the cache line’s information, cache miss rate and load/store
instructions count etc... Since this report aims to reduce the overhead of cache
simulation, we pointed out there are some redundancies in translating load/store
instructions during the micro-architecture simulation and improved the performance
through our method.
19
3.2 Modify Cache Simulation Mechanism
As mentioned previously, this study aims to reduce the cache simulation’s time.
Therefore, we choose the sim-cache simulator to implement our method and modify
the cache mechanism in it. As shown in Figure 10, the simulator implements the way
of the cache simulation’s function call, it contained in sim-cache.c, and the cache
model resides in cache.c and cache.h. The above files are the target that we will focus
on.
Figure 10 Performance cores of sim-cache level
3.3 Merge The Cache Simulations In The Same
Cache
Sim-cache translates and executes the instructions serially. Since that, the same
translated code is executed repeatedly when the program has loops in it. Take forloop
as example, programmers usually use forloop to deal with computations, memory
copy, searching algorithm and string comparison. The data are stored continuously in
20
continuous. Each load or store instruction implicitly calls a cache access function to
handle the data cache simulation and the accessed locations are consecutive in this
situation. Based on this conclusion, we could merge the simulations into one when the
accessed cache blocks are in the same cache line.
The following steps are used to achieve our goal, as proposed in Figure 11.
Figure 11 The flowchart of implementation
First, we create some variables to record the old PC (program counter) and check
whether there is a loop or not during the simulation’s routine. If the value of old PC is
bigger than current PC, and the address of current PC is always equal to the one of
last comparison, the loop exists. Then record the instruction sequences between these
two program counters. After checking the continuity of memory addresses, the
21
cache line. Use the default configuration in sim-cache as example, the data cache line
size is 32 bytes, each load word instruction accesses 4bytes data from the data cache.
Therefore, the maximum number of unrolling is 8 in this case.
Loop unrolling is a loop transformation technique that attempts to upgrade a
program’s performance. After unrolling, the loop is expanded. There are repeat
instruction sequences in the unrolled loop, as shown in Figure 12.
Figure 12 Loop unrolling
The arrowed instructions is the same instruction in each loop iteration, these
instructions call the cache access function, accessing the data cache continuously after
unrolling the loop.
Now we can merge these simulations into one. In our modified routine, the first
load or store instruction calls a cache access function which accesses four times of
22
the original simulator’s routine uses switch statement and macro functions to do the
implementation of instruction execution. This switch statement uses an enumerated
type “op” which is passed as argument here and its value corresponds to opcode’s
name. SYMCAT is a macro function which combines the OP’s name and the string
‘IMPL’ to a macro function. Take lw (load word) instruction as example, the
SYMCAT returned a combined string “LW_IMPL”, it has been defined in the
“machine.def” and this function call multilevel macro calls to finish the instruction
execution.
Figure 13 Original implementation of instruction execution
Figure 14 shows a part of code of modified version of sim-cache simulator.
LW_CACHE_IMPL represents a multilevel path of optimized cache simulation, and
the LW_MEM_IMPL updates memory status but not goes through the data cache. The
branch flag is set to count the stall of load word instructions, because after merged the
23
Figure 14Modified implementation of instruction execution
Figure 15 shows the difference between original and modified way. In ideal
situation, the speedup of cache simulation time is 4.
Figure 15 Cache line’s status
3.4 Address Overlapping Problem of Load/Store
Instructions
In the above paragraph, we explain our method in detail. However, there is a big
24
addresses which be accessed by load/store instruction must be continuous first, so the
cache line’s value can be the same as the original one after executing the modified
routine. But there is a special case that the program will choose the original routine to
25
IV. Experiments and Results
In this chapter, the experimental result using different cases is shown. Each case’s
number of iteration is 10 to 100000 times; hence the result could show the
performance from small to large. We use SimpleScalar 3.0, SimpleScalar PISA GNU
GCC compiler and SimpleScalar PISA GNU binary utilities which are required for
users to use the PISA instruction set and build their own binaries.
4.1 Experimental Environment
Our experiments run on an Inter i5-760 @ 2.80GHz with 4GB RAM desktop
machine. The operating system is 32-bit Ubuntu 12.04 LTS. The test cases are
mentioned behind; these cases are compiled with –O3 flag by SimpleScalar compiler
tools that are based on GNU GCC. The program execution time is measured by
clock_gettime function. It is accurate to nanosecond that is more precise and proper
than the gettimeofday function, since the cache simulation time is usually hundreds of
nanoseconds. Figure 16 shows how to use this function to calculate the execution
time.
26
4.2 Case Studies
First, we will introduce some cases in a loop and implement our speedup methods
on them in this part and explain the common problems in these cases. Then explain
how to solve or avoid them.
4.2.1 Array Addition
As shown in Figure 17. This case is a simple add instruction in a loop. It loads
data from two addresses, then adds it and stores the result in another memory address.
Figure 17 Case: Array Addition
4.2.2 Memory Copy
In this case, we only copy the data from an address to another one. Since there is
one load and one store word instruction, the times of data cache access are two for
27
Figure 18 Case: Memory Copy
4.2.3 Comparison
It is a common case when we try to determine a variable’s value by a comparison.
Such as A equals B, A is greater than B and A is not equal to B etc… In Figure 19, we
make array c’s value 0 when the value of array a and b are equal, otherwise the value
of array c is 1. The lower right corner of Figure 19 shows the translated code, the first
and second line are normal load instructions, we could use our optimization on them,
but the store instructions in the following lines cannot be optimized. Since we don’t
know whether the comparison is taken or not, we cannot merge the cache simulation
28
Figure 19 Case: Comparison
4.2.4 Linear Search
This case is a very simple search method which we often used it to find specific
number in an array. All the value in array arr[] are produced randomly, so did the
value of “search”. After found the target number, this case set array arr2 and flag is 1.
29
4.2.5 Bubble Sort
This case is a bubble sort which works by comparing each element of the list with
the element next to it and then swapping them if required. Since this case uses a
comparison before swapping the array data, the sequence of translated code is similar
to comparison case one which is mentioned above. Figure 21 shows the source c code
and the translated code sequence of this case. There are two store word instructions
after branch equal instruction in the fourth line of translated code. When this branch is
taken, these store instructions have been jumped, therefore them cannot be optimized
by our implementation way. As expected, the performance gain may be lower than
array addition and memory copy and be close to comparison case.
30
4.3 Preliminary Results
This section shows the early result of our experimental method. We choose array
addition case to verify our method. Table 3 and 4 shows the read time and write time
of data cache simulation in the main optimal loop respectively. The ratio of original
version to modified one is about 3.3x to 3.8x, which means the speedup of data cache
simulation. It’s close to the theoretical value as mentioned previously.
Iteration times Original(nsec) Modified(nsec) Ratio
100 124508 32513 3.82
1000 12339431 333466 3.72
8000 10486522 3106978 3.38
Table 4 Read time of data cache simulation (in the main loop)
Iteration times Original(nsec) Modified(nsec) Ratio
100 63209 18015 3.51
1000 598556 179722 3.33
8000 5050219 1500883 3.36
Table 5 Write time of data cache simulation (in the main loop)
The following tables show the total time of data cache simulation with original
and modified version. As shown in Table5, the speedup is only about 1.5 and the
31
Iteration times Original(nsec) Modified(nsec) Ratio
100 457357 349692 1.31
1000 2779136 1830592 1.52
8000 21107228 13715219 1.54
Table 6 Read time of data cache simulation (Total)
Iteration times Original(nsec) Modified(nsec) Ratio
100 2485621 2407451 1.03
1000 3962573 3518010 1.12
8000 17512895 13812644 1.27
Table 7 Write time of data cache simulation (Total)
4.3.1 Array Initialization Problem
After profiling, we found the bottleneck of the total cache simulation. In these
test codes, the arrays are initialized before using. The compiler implicitly initializes
these arrays iteratively, just like copying memory data from an array to another one in
a forloop. Figure 22 shows the translated code sequence of array initialization. There
is a little different to those cases mentioned previously. The memory address is
continuously with load/store word instructions in each loop, so we don’t need to
unroll the loop to improve it. To reduce the total time of cache simulation, a feature
32
shown in Figure22, merging load’s cache simulation into one, so do store’s. Therefore
the total time of cache simulation is decreased significantly. In the next chapter, this
study will show the this optimization’s influence
Figure 21 code sequence of array initialization
4.4 Experiment Results
This section shows the final results of above cases. First we display the data of
each case in default of cache and make some explanations of these results, then
compare the performance of cache block size. After the performance issue, the
analyses of cache miss rate of each case are shown to ensure the correctness of our
modified version. Finally we briefly conclude the effect of our optimal method in
micro-architecture simulator’s cache.
33
default configuration (with 256 sets, 32 bytes for each block and the associative of set
is 1) and its size is 8KB. As the first case, we introduce the parts of this diagram in
detail. In the bottom of this diagram, the horizontal axis shows the number of loop
iterations and in the left of this figure, the vertical axis shows the ratio of original
Simplescalar’s data cache access time to modified versions. There are 4 columns in
fixed iterations of loop. The left hand side is the collections of read/write data in the
optimal scope and the right hand side is the collections of read/write data during the
whole program. This study will use the same format to perform the results in the
following figures.
Figure 22 Case : Array Addition (with default configuration of L1 data cache)
As shown in Figure23, the speedups are not consistent when the loop iteration’s
34
by experimental error. The largest test data displays the modified version’s speedup is
about 3.4x to 3.5x and the experimental results between the optimal loop and the
whole program are more and more closely when the iteration’s number goes from
small to big; in other words, the charts which consist of 4 columns are getting more
and more smoothly from left to right.
Figure 23 Case : Memory Copy (with default configuration of L1 data cache)
Figure 24 shows the case 2 results. The purple charts show the improved
performance of write data cache access during the whole program time. When the
iterations go from small to big, the dark red charts which mean the modified write
data cache performance of the optimal loop scope look like as the purple chart. And
the same phenomenon is shown in blue and green chart. It means that the results are
getting more stable of large test case. In conclusion, the speedup is about 3.3x to 3.5x
3.33 3.38 3.21 3.35 3.19 3.39 3.45 3.53 3.18 3.34 3.34 3.43 3.39 3.4 3.59 3.54 0 0.5 1 1.5 2 2.5 3 3.5 4 100 1000 10000 100000 Speedup
The number of loop iterations
Memory Copy
35
in the largest case.
Figure 24 Case : Comparison (with default configuration of L1 data cache)
In Figure 25, the blue charts are more evident than the others. The reason is that
the modified routine only change the load mechanism in the optimal loop and it
account for a small rate of the total load instructions. Therefore, the dark red charts
are all close to 1 because the write data cache mechanism is the same; and the green
charts grow slightly when the number of iterations changed from 100 to 100000.
There is only one kind of charts hasn’t be mentioned above – the purple charts. It
shows the total time of write data cache access is reduced, but it looks like
unreasonable since the write data cache efficiency in the optimal loop is almost the
same as before. There is a complete explanation in the following sentences.
In the previous chapter, there is another optimized way to accelerate the load or
4.13 4.06 3.75 3.72 1.04 0.98 0.91 1.06 1.03 1.07 0.96 1.07 1.61 1.17 1.02 0.98 0 0.5 1 1.5 2 2.5 3 3.5 4 100 1000 10000 100000 Speedup
The number of loop iterations
Comparison
36
store instructions, and this method is out of the optimal loop. After traced the
assembly code, we found that there are some consecutive store instructions in certain
loop which didn’t vary even though array size and loop iterations changed. That’s the
reason that purple charts show some speedup when test data is small but make rarely
improvement in the large test.
Figure 25 Case : Linear Search (with default configuration of L1 data cache)
In Figure 26, the read data cache time is improved in the optimal loop, the
speedup is about 3.5x to 3.8x. Due to the ratio of load instructions in the loop to other
loads, the performance of total read time decreased when the iterations had increased.
Since the write data count is different between original Simplescalar and modified one,
it makes no sense to put the ratio of write data cache time in the optimal loop in this
figure. The purple charts show the same trend as previous case, the write data access
3.81 3.98 3.51 3.81 1.35 1.26 1.15 1.13 2.56 1.72 1.2 1.11 0 0.5 1 1.5 2 2.5 3 3.5 4 100 1000 10000 100000 Speedup
The number of loop iterations
LinearSearch
37
is improved out of the loop. Even though the optimization made 2.56 speedup in small
test data, the speedup is rare when the program iterations grew.
Figure 26 Case : Bubble Sort (with default configuration of L1 data cache)
Figure 27 shows the last case in our study. Compare the read data cache
efficiency in the loop and the total runtime, there is a strong relevance between them.
When the test data get bigger, the green chart is closer to the blue chart. It means the
load instructions are almost in the optimal loop when the number of loop iterations
raised, so the speedup in the loop is almost identical to the total execute time’s
speedup. The purple charts show the same results with last two cases, it is no more
explanation here. 4.09 3.69 3.93 3.89 0 0 0 0 0.96 1.76 3.7 3.81 2.53 1.31 1 0.98 0 0.5 1 1.5 2 2.5 3 3.5 4 10 100 1000 2000 Speedup
The number of loop iterations
BubbleSort
38
Cache miss rate
Figure 27 Data cache miss rate (Original)
Figure 30 and 31 show the data cache miss rate with original and modified
version. The miss rates are almost the same in these cases with different cache
configuration. Still, there is a little difference between these two versions when the
cache block size is 16 bytes. The difference is very small and do not influence the
correctness of our study results.
0.2499 0.2498 0.039 0.0565 0.0002 0.125 0.1249 0.0206 0.0292 0.0001 0.0625 0.0625 0.0126 0.0166 0.0001 ArrayAddition MemCopy Comparison LinearSearch BubbleSort
Miss rate
Loop Size : 100000
39
Figure 28 Data cache miss rate (Modified)
0.2493 0.2489 0.0389 0.0563 0.0002 0.125 0.1249 0.0206 0.0292 0.0001 0.0625 0.0625 0.0126 0.0166 0.0001 ArrayAddition MemCopy Comparison LinearSearch BubbleSort
Miss rate
Loop Size : 100000
40
V. Conclusion and Future Work
In this thesis, we presented a simple method to improve the micro-architecture’scache simulation performance, and used some general test code as case studies to
verify our hypothesis. After discussing the possible problems of implementing such a
method in modified Simplescalar, many experiments have been done. The results are
presented and discussed in the previous chapter. As expected, the results show the
average speedups are about 3.4x to 3.9x when memory read operations dominate the
execution with default data cache configuration.
This study makes a good case for using DBT to speed up micro-architecture
simulations; we could also extend the same idea to other micro-architecture features
such as pipeline or load/store buffer simulations. For example, the DBT could try use
similar optimizations in upper levels, such as merging the behavior of same stage in
the pipelines.
41
In other ways, the current modified Simplescalar leaves much room for
improvement. Now the merge mechanism is pre-set before running the simulation,
and the speedup factor is fixed to 4. In simulations of future processors, the actual
speed up could be greater when the cache line size is more than 4 words, as is rather
42
Reference
[1] Ebcioglu, K. (2001, Jun). Dynamic binary translation and optimization. Computers, IEEE Transactions on, pp. 529-548.
[2] Krall, A. (1998, 12 18). Efficient JavaVM just-in-time compilation. Parallel Architectures and Compilation Techniques, 1998. Proceedings. 1998 International Conference on, pp. 205-212.
[3] T Austin, E Larson, D Ernst. (2002, Feb). SimpleScalar: an infrastructure for computer system modeling. Computer, pp. 59-67.
[4] D. Burger and T. Austin. (1997, June). The Simple, Scalar tool set, version 2.0. ACM SIGARCH Computer Architecture News, pp. 13-25.