國 立 交 通 大 學
交 通 運 輸 研 究 所
碩士論文
建立巨微觀機車混合車流模式
A Macro-Micro Model of Mixed Traffic Flow
of Cars and Motorcycles
指導教授: 邱裕鈞 教授
研 究 生: 孫晟安
建立巨微觀機車混合車流模式
A Macro-Micro Model of Mixed Traffic Flow of Cars and Motorcycles
研究生:孫晟安
Student: Chen-An Sun
指導教授:邱裕鈞
Advisor: Yu-Chiun Chiou
國 立 交 通 大 學
交 通 運 輸 研 究 所
碩 士 論 文
A Thesis
Submitted to Institute of Traffic and Transportation College of Management
National Chiao Tung University In Partial Fulfillment of the Requirements
For the Degree of Master
in
Traffic and Transportation June 2013
Taipei, Taiwan, Republic of China
i
建立巨微觀機車混合車流模式
學生:孫晟安 指導教授:邱裕鈞 博士 國立交通大學交通運輸研究所碩士班摘要
按照詳細程度來分,車流模式可以分為:巨觀(Macroscopic)、中觀(Mesoscopic)與 微觀(Microscopic)三種模式,分別應用時機關係到準確性與效率之間的權衡。巨觀車 流模式在於求解大量車流行為之描述,優點在於處理時間效率高但準確性較為觀車流 模式低;而微觀車流模式則針對於車輛與車輛間之刺激與反應,優點在於資料之詳細 程度。為了呈現於長廊路段單純之車流行為與接近路口的複雜的車隊等候,分別利用 巨觀模式描述單純的長廊路段與利用微觀模式描述鄰近路口路段可確保同時具有準確 性與時效性。然而,如何求得最佳之巨微觀中間介面位置與如何設計界面資訊轉換機 制即是巨微觀模式的核心問題。再者,為了解釋亞洲市區道路內主要小客車與機車混 合車流,建立巨微觀混合車流模式有其必要性。 基於上述觀點,本研究嘗試建立一巨微觀車流模式以描述台灣混合車流。本研究 所提出之巨微觀混合車流模式的創新思維有三點:1. 結合兩種模式的優點,並可正確 流暢傳遞車流之資訊;2. 考慮機車插空隙的性質,並透過車種比例決定車種的擁擠密 度;3. 加入多車道的模式,並考慮車道之間車輛的互動與變換車道。在模式驗證上, 本研究以兩架攝影機自高樓拍攝一段長度為 300 公尺之三車道都市公路,並透過每秒 擷取畫面記錄每輛小客車與機車之位置軌跡於長廊路段與鄰近路口路段。 本研究於不同介面設置位置比較所提出之模式的表現差異。準確性之評估準則係 利用對稱平均絕對誤差百分比(SMAPE)比較實際資料與模擬流量每秒之結果於不同車 道之小客車與機車。如同預期,介面越靠近路口,效率性越高但準確性則降低。然而, 效率性改善與準確性降低的程度皆隨著介面越靠近路口而降低。小客車車流與機車車 流均有合理之模擬結果。研究結果發現模擬機車車流之誤差率較小客車流量大,可能 造成原因為受到轉向車流和路邊停車之影響。此外,長廊路段之誤差大於鄰近路口路 段之誤差,因為車流於鄰近路口路段受到號誌影響。內車道之誤差較其他車到小,因 為快車道禁止機車行駛。整體而言,本研究所提出之巨微觀模式表現是可靠的。 關鍵字:混合車流、機車、多車道、巨微觀轉換。ii
A Macro-Micro Model of Mixed Traffic Flow of Cars and Motorcycles
Student: Chen-An Sun Advisor:Dr. Yu-Chiun Chiou
Institute of Traffic and Transportation National Chiao Tung University
Abstract
In light of the level of details, three categories of traffic flow models: macroscopic, mesoscopic, and microscopic, are independently adopted for the trade-off between simulation accuracy and efficiency. The macroscopic models accounting for the behaviors of a group of vehicles are obviously more efficient but less accurate than the microscopic models which replicate the movements of individual vehicles. However, to replicate the traffic movement behaviors along a corridor containing segments with simple traffic behaviors and intersections with complex queuing, weaving and turning behaviors, it is rationale to use of macroscopic models to simulate traffic behaviors moving along segments and use of microscopic models to replicate traffic behaviors approaching intersections for compromising simulation accuracy and efficiency. However, how to determine the optimal location of the interface of macro- and microscopic models and how to design the interfacing mechanism to convert macroscopic flows into microscopic flows are at the heart of the integrated models, namely, the macro-micro models. Furthermore, to acknowledge the prevailing mixed traffics of cars and motorcycles on Asian urban streets, mixed macroscopic and microscopic models are considered.
Based on these, this study attempts to develop a macro-micro model which can account for the mixed traffic condition in Taiwan. The novelties of the proposed macro-micro model are threefold: 1) Ability to convert upstream macroscopic traffic flow into downstream microscopic flow. 2) Consideration of the lateral drifts and transverse crossings of motorcycles by determining the jam density and free flow speed according to car-motorcycle density ratio. 3) Consideration of lane changing behaviors at the roads with more than three lanes. To calibrate and validate the proposed models, a video-taking of a three-lane urban street was conducted. Trajectories of all cars and motorcycles within the study segment (300m in length) and intersection were then frame by frame traced and recorded.
The performances of the proposed model under various locations of the interface are compared. Accuracy index is measured by the SMAPE values between real and simulated second-flows of cars and motorcycles at different lanes and distances to the intersection. Efficiency index is of course measured by the simulation times. As expected, the closer to
iii
the intersection of the interface is, the higher efficiency but the lower accuracy it has. However, the improvement in efficiency and deterioration in accuracy is diminishing as the distance to the intersection decreases. Both flow of cars and motorcycles are well simulated. It is also found that the error rates of simulated motorcycle flows at different lanes are higher than those of simulated car flows. One of the reasons for that may be the influence of turning flow and parallel illegal parking. Furthermore, the error rates at the mid-road section are higher than at the intersection because the traffic flows are restricted by the signal control. The error rates of traffic flows in inner lanes are lower than those of outer lanes because of the prohibition of motorcycles in using the inner lane. Overall, the performance of the proposed model is promising.
iv
誌謝
從一開始的起頭想法到之後論文的完成,絕對不是一個人可以辦到的。因為有許 多人的幫助才有辦法完成。同時發現自己的能力實在有限,常常會因為遇到問題而失 望。 謝謝邱裕鈞老師平日的教導與意見,總是覺得老師在研究上很認真,也在課堂上 給予許多的幫助。在論文上的指導也是多鼓勵學生去嘗試看看,並在適時的時機將我 們導正回來。也感謝所上的所有老師,有他們在任教的課程上也提供各樣的幫助,讓 我們知道原來還有很多不懂的東西。感謝所辦的柳小姐和何小姐,除了日常的打工以 外還幫我們處理許多行政事務,還願意包容我們這群什麼都要慢個幾天才能處理的小 夥子們。 感謝這兩年一起努力的夥伴們,因為有你們,我的研究生生活多了很多樂趣。同 一家的史蒂芬大力相挺,還有學園辦公室願意出借辦公大樓攝影。人很好的得政也在 口試中幫了許多忙,統計很厲害的奎安在運輸實務上也提供了很多的點子。很會焦慮 的育瑄雖然很少露面,一直提醒我們重要期限快到了。很快就考上了的榕芳也是非常 厲害的把一切事情都處理妥當,帥哥豪邁的笑聲總是引起大家的歡樂。感謝家內的 RFTG 小組在忙碌的生活中帶來樂趣,還有第一研究室衝鋒陷陣的好夥伴。感謝一直 陪我吃潛艇堡的冠宇,感謝很能聊的阿龍和提供點心的紹谷。謝謝很會拍照的丁丁, 還有其他的同班同學。謝謝會一直來關心大家的 Victor,還有幫忙找尋有用電腦程式 的 Jose。謝謝螃蟹學長辛苦帶我們做計劃,也提供了不少論文上的意見。感謝清潔阿 姨的用心、鄭小姐、陳小姐的幫忙。 最後要感謝自己的父親給予很大的支持,無論是在程式上或是想法上,否則沒有 辦法完成論文。還有母親的每日無時無刻的照顧,令我沒有後顧之憂。感謝弟弟平常 的關心,聊許多事情。謝謝在這段時間很關心我也很愛我的子慧,傾聽我任何的難過 和喜樂,能在這段時間認識妳真的是恩典。謝謝所有為我禱告的人,還有最有力的天 父爸爸。帶我到這邊念書、學習、讓我經歷這一切。 孫晟安 謹誌於 國立交通大學交通運輸研究所 中華民國一二年六月v
目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iv 表目錄 ... vii 圖目錄 ... viii 第一章 緒論 ... 1 1.1 研究背景與動機 ... 1 1.2 研究目的 ... 2 1.3 研究流程 ... 3 1.4 研究內容 ... 4 第二章 文獻回顧 ... 6 2.1 微觀車流模式 ... 6 2.1.1 微觀均質車流模式 ... 6 2.1.2 微觀混合車流模式 ... 7 2.2 巨觀車流模式: ... 8 2.2.1 巨觀均質車流模式 ... 9 2.2.2 巨觀混合車流模式 ... 11 2.5 巨微觀混合介面轉換 ... 18 2.6 小結 ... 20 第三章 模式建構 ... 21 3.1 巨觀混合車流模式 ... 21 3.2 巨微觀轉換模式 ... 27 3.3 微觀混合車流模式 ... 29 3.4 模式流程 ... 30 第四章 實驗分析 ... 32 4.1 實驗模擬 ... 32 4.2 實驗路段選擇 ... 41 4.3 資料處理 ... 42 第五章 模式驗證 ... 51 5.1 參數推估 ... 51 5.2 模式結果與驗證 ... 52 第六章 結論與建議 ... 66 6.1 結論 ... 66 6.2 建議 ... 67vi
vii
表目錄
表 2.1 巨觀混合車流模式彙整表 ... 17 表 3-1 模式變數參數註釋表 ... 21 表 4-1 模擬參數設定表 ... 33 表 4-2 實地道路指示物 ... 46 表 5-1 參數推估表 ... 51 表 5-2 微觀模式參數表 ... 52 表 5-3 模擬道路長度分界表 ... 52 表 5-4 模式模擬情境時間效率 ... 53 表 5-5 SMAPE 數值評估準則 ... 54 表 5-6 路口處之 SMAPE 值 ... 55 表 5-7 距路口 100 公尺處之 SMAPE 值 ... 55viii
圖目錄
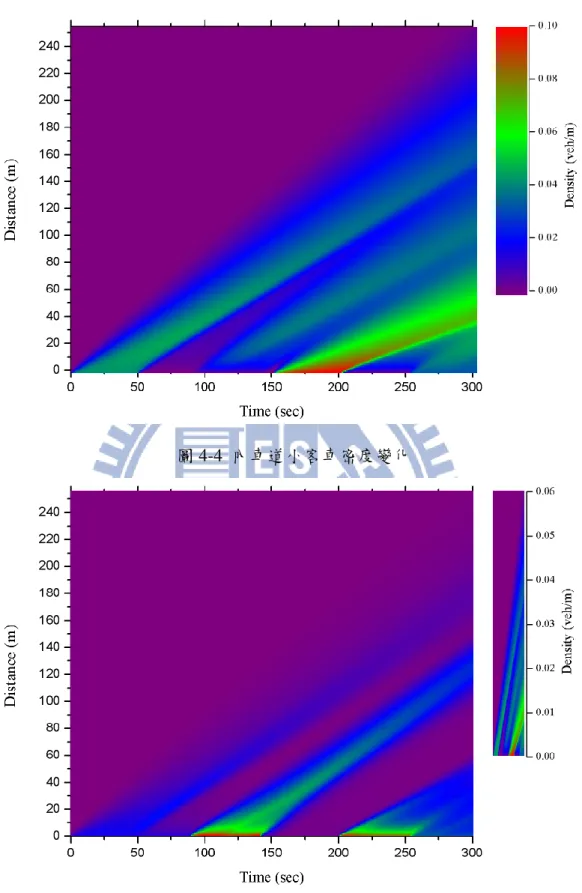
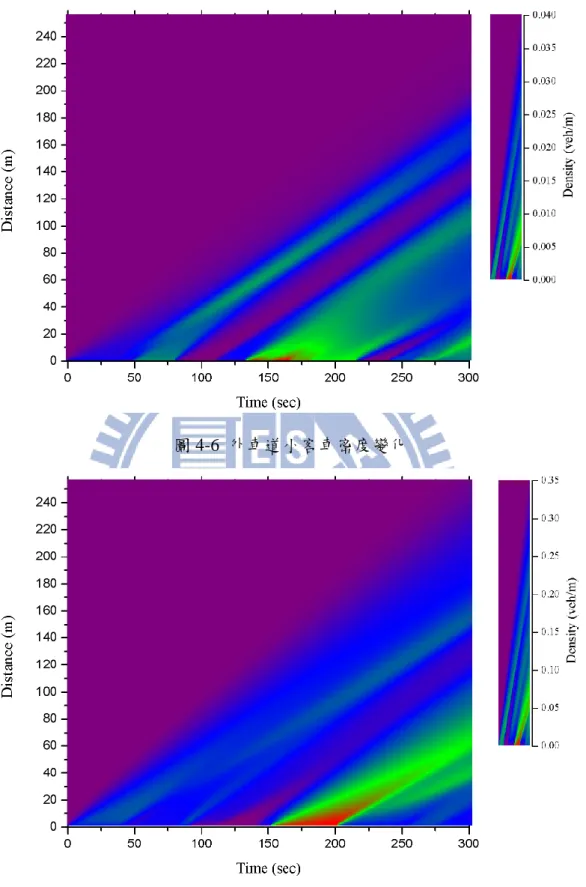
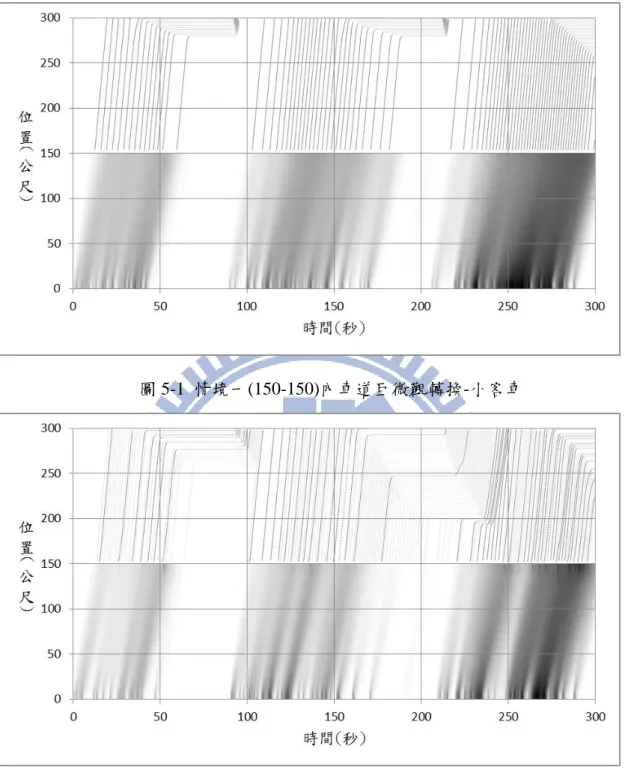
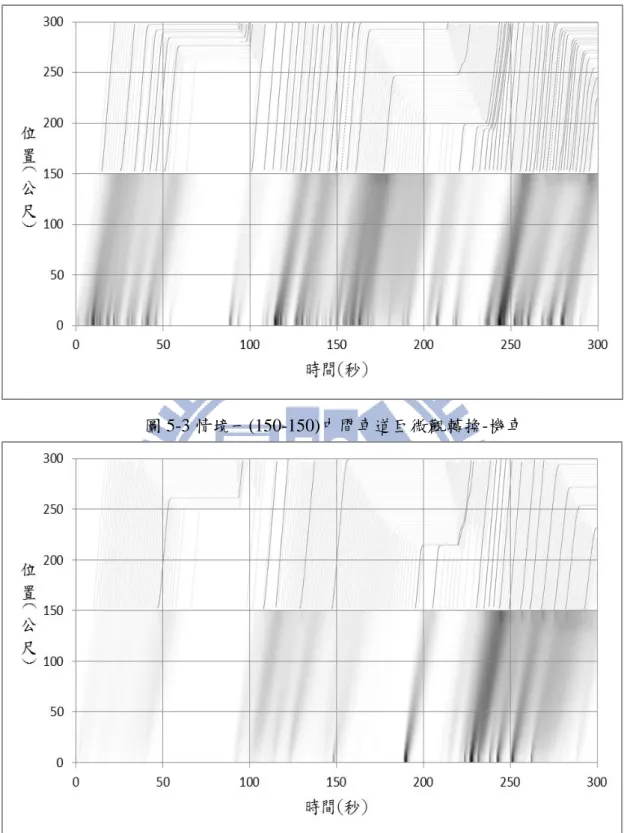
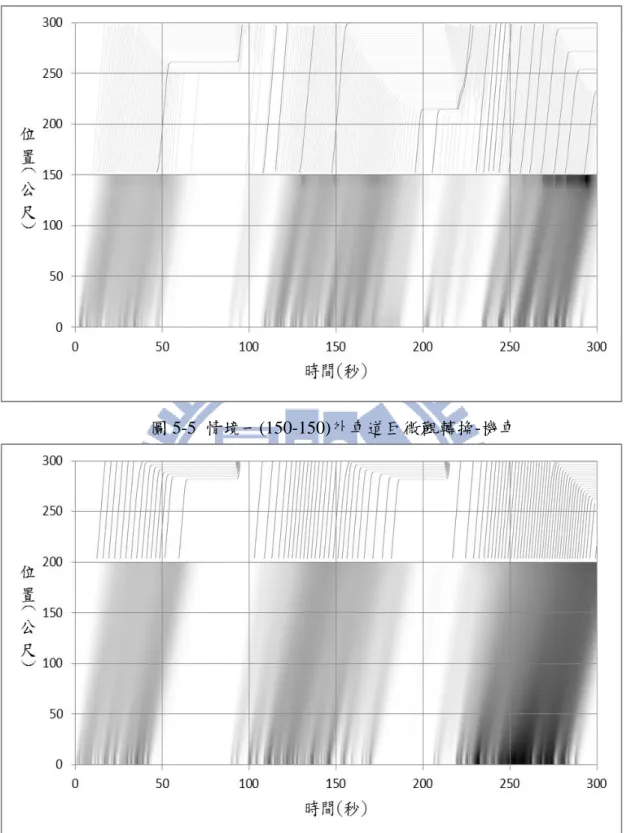
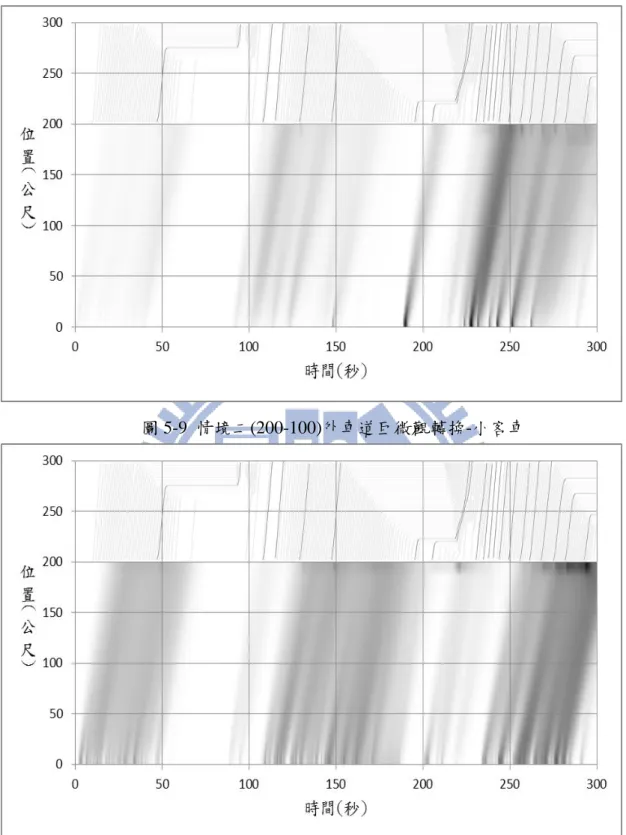
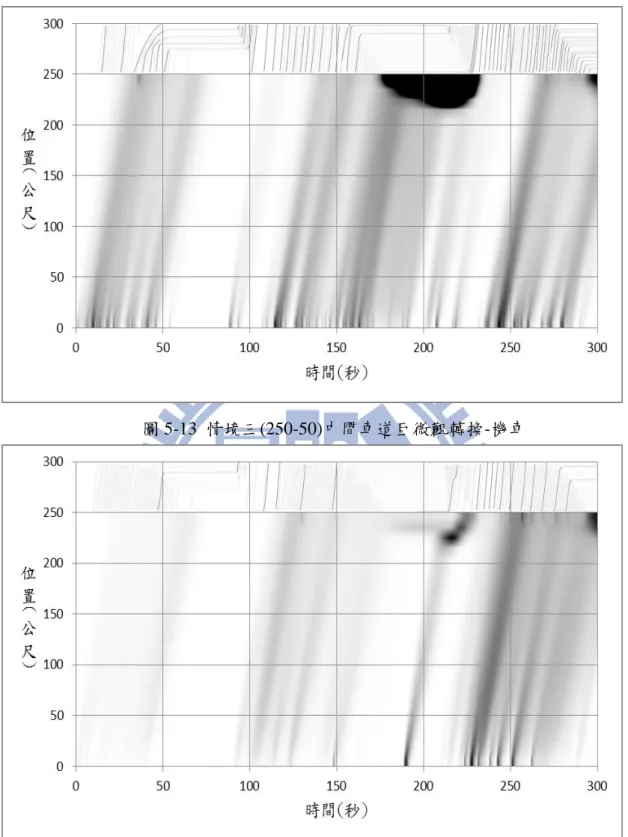
圖 1-1 研究流程圖 ... 3 圖 1-2 實際研究範圍界定圖 ... 5 圖 3-1 小客車與機車密度關係圖(一) ... 25 圖 3-2 小客車與機車密度關係圖(二) ... 25 圖 3-3 小客車速率與密度關係圖 ... 26 圖 3-4 機車速率與小客車密度關係圖 ... 27 圖 4-1 內車道車種密度資料之輸入 ... 33 圖 4-2 中間車道車種密度資料之輸入 ... 34 圖 4-3 外車道車種密度資料之輸入 ... 34 圖 4-4 內車道小客車密度變化 ... 35 圖 4-5 中間車道小客車密度變化 ... 35 圖 4-6 外車道小客車密度變化 ... 36 圖 4-7 中間車道機車密度變化 ... 36 圖 4-8 外車道機車密度變化 ... 37 圖 4-9 小客車於不同時階之密度分布圖 ... 38 圖 4-10 機車於不同時階之密度分布圖 ... 39 圖 4-11 內車道車輛產生時間 ... 39 圖 4-12 中間車道車輛產生時間 ... 40 圖 4-13 外車道車輛產生時間 ... 40 圖 4-14 小客車密度衝擊變化(A)左車道(B)中間車道(C)外車道 ... 40 圖 4-15 機車密度衝擊變化 (A)中間車道(B)外車道 ... 41 圖 4-16 影像銜接圖 ... 42 圖 4-17 觀測座標系統變換示意圖 ... 43 圖 4-18 由量測點計算觀測者到原點之距離 ... 45 圖 4-19 實際拍攝之影像 ... 47 圖 4-20 車輛點擊程式使用畫面 ... 48 圖 4-21 車道線之空間座標圖-調整前... 49 圖 4-22 車道線之空間座標圖-調整後... 49 圖 5-1 情境一(150-150)內車道巨微觀轉換-小客車... 56 圖 5-2 情境一(150-150)中間車道巨微觀轉換-小客車... 56 圖 5-3 情境一(150-150)中間車道巨微觀轉換-機車... 57 圖 5-4 情境一(150-150)外車道巨微觀轉換-小客車... 57 圖 5-5 情境一(150-150)外車道巨微觀轉換-機車... 58 圖 5-6 情境二(200-100)內車道巨微觀轉換-小客車... 58 圖 5-7 情境二(200-100)中間車道巨微觀轉換-小客車... 59 圖 5-8 情境二(200-100)中間車道巨微觀轉換-機車... 59ix 圖 5-9 情境二(200-100)外車道巨微觀轉換-小客車... 60 圖 5-10 情境二(200-100)外車道巨微觀轉換-機車 ... 60 圖 5-11 情境三(250-50)內車道巨微觀轉換-小客車 ... 61 圖 5-12 情境三(250-50)中間車道巨微觀轉換-小客車... 61 圖 5-13 情境三(250-50)中間車道巨微觀轉換-機車... 62 圖 5-14 情境三(250-50)外車道巨微觀轉換-小客車... 62 圖 5-15 情境三(250-50)外車道巨微觀轉換-機車... 63 圖 5-16 實際道路路口流量變化圖 ... 63 圖 5-17 情境一(150-150)路口流量變化圖 ... 64 圖 5-18 情境二(200-100)路口流量變化圖 ... 64 圖 5-19 情境三(250-50)路口流量變化圖 ... 65
1
第一章 緒論
1.1 研究背景與動機
車流理論的貢獻在於透過模式來描述車流在現實中的不同行為。從早期的跟車模 式到近年來的連續流模式,許多研究致力於模式的建立。不同的模式所注重的行為也 不盡相同。由觀察角度來區分,車流理論可以分為:巨觀、中觀與微觀。微觀車流所 描述的是車與車之間的相互刺激與反應,視周遭情況來決定自身的加減速度;巨觀車 流則能描繪整體車流的特性與變化。中觀車流模式則近似於巨觀,能夠描述個體對於 前方道路密度的反應情形。在微觀車流模式中,所使用的變數為個體速度、車間距和 加速度,最著名並廣泛被應用的模式為 GM 跟車模式。反之,巨觀則使用車流平均速 度、密度、流量等車流整體變數,較為知名的模式為 LWR 連續流模式。然而,巨觀 模式的不足在於無法提供詳細的互動行為,微觀則是無法於時間上有效率的處理大量 的路網資料。因兩者的使用時機不同,若在不同面向之間能夠相互連結,則能夠依照 不同需求以呈現車流,故巨微觀模式之建立有其必要性。此為本研究之動機之一。 早期的車流模式專注在均質車流和單一車道環境,日後有許多研究開始對混合車 流和多車道的模式進行研究。儘管均質車流易於模化,卻於生活中較為少見,故混合 車流有其發展性,也較符合現實情況。其解釋不同車種的理想速度和車體大小有所差 異,使得車流間產生不同之行為與干擾。多車道的問題帶出轉換車道和超車等特殊行 為,也相對增加模式的複雜度。國內車流最大的特色在於機車數量眾多,因其車身較 小故其行為模式也較特殊。國外的研究相對較少提及機車行為,多數為探討大貨客車 與小客車、快車與慢車之互動。機車體積小,故於道路壅塞時仍可藉由穿梭行為 (filtering)繼續前進;機車並無車道分隔的概念,同一車道上能同時有一輛以上的機車 並行前進。若單純以小客車當量來進行計算流量則會產生偏誤,並且機車超車時不一 定需要變換車道。顯然國外之混合車流研究不適用於描述國內機車混合車流問題,故 有發展機車混合車流模式之必要性。此為本研究之動機之二。 當考慮到機車與小客車之混合車流密度,就必須將多車道環境一併考慮。早期車 流模式多是建立於單車道問題,但現實生活中車道數量往往與車流量成正比,。多車 道環境將會影響到車輛的轉移,並可討論變換車道之原因,可能是因為密度過高而使 駕駛者無法達到滿意的速度,或是駕駛員本就已有轉彎之預期而變換車道。此為本研2 究之動機之三。 本研究針對不同的巨觀、微觀車流模式之回顧,比較各模式之特色。並檢視過去 研究中是否有針對機車之混合車流,將機車與小客車之互動行為考慮進模式中。選擇 其中適合用以處理混合車流之成熟模式,嘗試進行轉換。於建立巨微觀模式後也能針 對其特性進行分析與驗證,以確保模式之貢獻與實用性。最後,對於此模式提出未來 可以延續之研究與日後於號誌化路口之幫助。
1.2 研究目的
本研究將從過去的研究中,引用發展成熟之巨觀、微觀車流模式,並定義介面的 轉換。其中需要考慮到混合車流,包含小客車和機車。在國內機車數量龐大且行為特 殊,故必須將其考慮在內。在研究中也需要顧及多車道的形式,進而產生的變換車道 行為。本研究所研究之道路範圍為市區路口與路口間之路段,如圖 1-2 所示。因此, 本研究的目的如下: 1. 找尋現有發展成熟之微觀混合車流模式,並能夠適用於國內機車車流行為的描述。 將其使用於巨微觀混合車流模式中。 2. 於文獻中找尋發展成熟之巨觀混合車流模式,將其使用於巨微觀混合車流模式之 中,並加入機車混合車流所帶來之影響與相互作用。 3. 界定巨觀與微觀混合車流模式間之介面,解決車流與車輛之間的轉換問題,以因 應不同資料需求,並期望模式可以應用於國內市區鄰近路口之道路。 4. 經由車流模擬軟體所得結果,驗證模式之準確性。並選定特定實驗路段,蒐集實 際車流資料,利用兩者之車流特性變數,例如密度,來驗證模式。 5. 分析介面設置位置不同而造成之差異。透過道路中不同處的介面設置後的結果進 行比較,檢視不同情境之下的效率與準確性,並解釋其差異之原因與結果。3
1.3 研究流程
本研究之流程如圖 1-1 所示。 研究目的確認 文獻回顧 巨微觀車流模式 微觀車流模式 巨觀車流模式 · 均質車流模式 · 混合車流模式 · 均質車流模式 · 混合車流模式 研究方法 · 轉換介面方法 模式建構 巨微觀轉換方法 微觀車流模式 巨觀車流模式 模式驗證 實地車流資料蒐集 車流模擬模式 模式特性探討 結論與建議 圖 1-1 研究流程圖4
1.4 研究內容
依據前述之動機與目的,本研究之內容為建構適用於國內機車混合車流之巨微觀 模式,參考國外相關文獻已進行模式之調整,並進行參數之推估,最後驗證模式之適 用性,探討巨微觀介面之時空分析。故將研究內容分成下列項目: 1. 確認問題方向與研究目的 透過問題之觀察,確立研究之動機與目的。從國內現形之車流中找找出問題,並 找出研究之動機,從建立本研究之五項研究目的,根據此方向逐步完成。 2. 回顧相關文獻 根據研究目的,閱讀相關研究與文獻。其中包含三個子部分:巨觀混合車流模式、 巨微觀混合車流模式和微觀混合車流模式。了解現有之研究對於車流模式之發展與異 同,並了解其所欠缺之部分與無法適當解釋國內機車混合車流行為。分別從巨、微觀 兩面向回顧,並找出發展成熟之現有模式作為建立模式基礎。最後回顧關於巨微觀轉 換之方法與模式,了解車流資訊如何順利傳遞。 3. 巨微觀機車混合車流模式之建立 透過文獻之回顧,依據不同面向找出合適之混合車流模式,並檢視其所欠缺之處, 探討機車混合車流與非機車混合車流之差異,進行模式的調整。同時將多車道納入考 慮,探討車道間之變換車道與超車行為於模式中,進而將三組模式結合,完成模式之 建立。 4. 實地資料蒐集與模式驗證 為探討模式建立後之適用性,本研究將蒐集國內市區道路之實地機車混合車流資 料。將於模式確認後進行參數之估計與模式配適度之探討。 5. 巨微觀介面之時空分析 在確認模式之完整性,則可探討於一市區道路上應如何設立巨微觀轉換介面,了 解不同設置點所造成之差異,並分析其差異產生之原因。5
6. 結論與建議
針對研究之結果,做研究結論總整理,歸納研究之貢獻,並對於尚未探討或不足 之處,提出後續研究之建議。
6
第二章 文獻回顧
本研究將針對不同面向之車流模式間的連結作處理,故需要回顧現有的不同車流 模式。其中可以分作巨觀車流模式與微觀車流模式兩項,並且將之細分為均質車流與 混合車流兩類,並回顧機車車流相關之文獻。中觀車流性質較貼近巨觀車流,故將一 並討論之。其中巨觀車流中較常被提出的模式有三類,分別是由 Lighthill 和 Whitham (1955) 並 Richards (1956)所提出的 LWR 連續流模式、由 Payne(1979)和 Whitham(1974) 建立的高階 PW 模式、由 Prigogine(1960)所提出的氣體動力車流模式。此外,也包括 對巨觀微觀之連結單獨出來進行文獻的回顧,檢視目前轉換介面上之處理方式。本研 究文獻彙整如下:2.1 微觀車流模式
微觀車流模式主要在探討車與車之間之互動。其所使用之動態變數包含了個體速 度、時間車距與空間車距。其以車輛為單位,並以下方原則呈現車輛之反應: 𝑅𝑒𝑠𝑝𝑜𝑛𝑠𝑒 = 𝑆𝑒𝑛𝑠𝑖𝑡𝑖𝑣𝑖𝑡𝑦 ∙ 𝑆𝑡𝑖𝑚𝑢𝑙𝑢𝑠 由車輛自身之敏感度與外在所施予之刺激,而導致車輛的加減速度。微觀車流模式係 建立在單車道環境,故車子無法超越前車,只能對前車之行為作出行動。 2.1.1 微觀均質車流模式 早期微觀車流模式發展較知名的為 GM 跟車模式,其亦為相關跟車模式之基礎。 以簡易的形式呈現車子的動態加速度: 𝑎𝑛(𝑡) = 𝑐𝑣𝑛𝑚(𝑡) Δ𝑣(𝑡 − 𝑇) Δ𝑥𝑙(𝑡 − 𝑇) 由此式可得知跟車模式為連續型模式。其描述加速度受到自身速度、與前車相對速度、 與前車相對距離影響。不同的𝑚值與𝑙值能夠與不同的巨觀模式相連結。 Bando et al.(1995)將各車輛的理想速度列入考慮,解釋個體以達到自身理想速度 的方式決定加速度的改變,亦即 OVM(Optimal velocity model)模式:𝑑𝑣𝑛(𝑡)
7
其中𝑙𝑛為車輛𝑛之車長,𝑠𝑛為車輛𝑛與前車之間距。然而理想速度模式所遭遇的問題為
出現不實際的加減速度值,車輛可能產生突然急停至速度完全為零的情況,此現象並 不符合實際。
Helbing 和 Tilch(1998)提出了 GFM(Generalized Force Model)模式,亦即廣義力模 式,目的是為了改善原有的 OVM 模式的缺陷。OVM 模式中有時會出現過大的加速度 或減速度值,卻依然產生事故的情形。其模式中之參數數量相對較少且意義明確,校 估也相對容易。使用之參數包含:理想速度、加速時間、車間距、最小車距、剎車時 間、加速減速互動範圍。車子之加速度是由廣義力的總和來決定,其不符合作用力等 於反作用力之牛頓定理。其形式如下: 𝑑𝑣𝑛 𝑑𝑡 = 𝑘(𝑣𝑚− 𝑣𝑛(𝑡)) + 𝑘(𝑉(𝑠) − 𝑣𝑚) + 𝜆Θ(−∆𝑣)∆𝑣 右手項之前兩項為加速力,後者為互動力。研究中發現此模式所模擬之結果與實際車 流資料較符合,此模式也能夠延伸到多車道上。 Jiang et al.(2001)認為 GFM 模式仍有問題存在,最大的問題即其模式對於相對速 度的敏感度不佳。經過模擬的結果,作者認為 GFM 模式在後車速度較前車慢時,兩 車之速度差的影響不顯著,並不符合現實狀況。因此以 GFM 模式為基礎,建立 FVDM(Full Velocity Difference Model)模式。其加速度式如下:
𝑑𝑣𝑛 𝑑𝑡 = 𝑘(𝑣𝑚− 𝑣𝑛(𝑡)) + 𝑘(𝑉(𝑠) − 𝑣𝑚) + 𝜆Θ(−∆𝑣)∆𝑣 + 𝜆Θ(∆𝑣)∆𝑣 透過增加最後一項使得在跟車速度較慢時也得以產生影響。經模擬發現,其最大加速 度不會超過 GFM 模式的值,並且能夠模擬較正確的延誤值。 2.1.2 微觀混合車流模式 在微觀車流模擬中,細胞自動機(Cellular Automata)被廣泛應用。因其操作簡易卻 仍有效率的演算法能夠用以描述車流特性,最早用於車流領域的為 Nage 和 Schreckenberg(1992)所建立之模式。其模式演算程序為 1.加速 2.減速 3.隨機性 4.車輛 移動,此四項步驟同時間應用到所有車輛上。而細胞的排列為一維並排,每個細胞最 多只會有一輛車在其中,且為單一車種。其模擬結果散佈在車流基本關係圖中有不錯 的表現。日後有許多相關研究將之應用在不同的路面幾何上,甚至是二維的多車道情
8 境。 Meng et al.(2007)使用細胞自動機模擬混合車流,其中包括機車跟小客車。此研究 將單一車道分為三條子車道,因機車體積較小,故可同時存在於同一車道上。在模擬 的過程中,將小客車的優先行駛的因素考慮進去。其模式給定一機車變換車道機率, 以描述機車變換車道之行為,卻僅適用於單車道上。 Lan et al.(2009)利用細胞自動機模擬包括機車之混合車流與其無規律的行為。有鑑 於機車體積與小客車不同,則設定小客車佔用 12(2x6)個格位,機車則只佔用 2(1x2) 個格位。以此設定進行車流的模擬有助於描述機車的特殊行為,單一車道為三格之寬 度,故得以呈現機車與小客車並行的情況。除了加減速等程序,另外包含平行的移動 邏輯,如超車與變換車道。此研究能以能夠模擬多車道的行為,其中同時考慮機車和 小客車的變換車道行為。 Lee et al.(2009)等人提出一微觀機車混合車流模式,用以應用於都市區域。主要針 對機車之行為進行模式建立,並找到幾項重要與小客車相異之處,並以倫敦市中心之 實地資料驗證模式。第一點差異為跟車距離,因考慮到機車體積小,能夠在前車緊急 剎車時平行移動以避免擦撞,故其安全距離相較於小客車小,並以其煞車距離來計算。 第二點為側向時空車距,因為機車超車與變換車道行為較小客車容易,故機車也會受 到前方側邊車輛之影響。最後一點為機車之路徑選擇方法,其使用羅吉特模式決定其 駛車行為。每個選項之效用受到前車與後車之距離、車種、速度等因素影響,並且又 受到上一個時階的決定影響有關,以確保機車行為不會突然改變過大。
2.2 巨觀車流模式:
巨觀車流模式在於描述整體車流之特性與行為,其中包含車流之平均速率、密度 與流量。三個變數之間互有關係且能以下式表示: 𝑞 = 𝑘𝑢 流量為密度與速率之乘積。因此關係式,即為車流的基本關係式。將實地車流資料繪 製到座標圖上,則可分別觀察密度與速率、密度與流量、流量與速率之關係。在此前 提下使得許多的巨觀模式被建立。9
2.2.1 巨觀均質車流模式
連續流的模式最早係由 Lighthill 和 Whitham (1955) 並 Richards (1956)所提出。藉 由流量守恆的關係,視車流作流體處理。其中包含流量守恆式: 𝜕𝑘 𝜕𝑡 + 𝜕𝑞 𝜕𝑥= 0 對密度作時間的偏微與對流量作空間的偏微,等號右邊於流量守恆之下為零。此外加 上車流的基本關係,意即車流速度為密度之函數: 𝑢 = 𝑢𝑒(𝑘) 然而此模式因簡單,故有些缺點存在。其在低流量時的準確性不佳,且車子會有突然 加速或減速的狀況發生。最大的問題即車流行為受限於基本關係式上的一對一關係, 只能描述均衡下的車流行為,並且無法對車速有更流暢的呈現。Payne(1979)和 Whitham(1974)建立了 PW 模式,其中加入了加速度的動量公式: 𝜕𝑢 𝜕𝑡 + 𝑢 𝜕𝑢 𝜕𝑥= 1 𝜏(𝑈𝑒(𝑘) − 𝑢) − 𝑐𝑜2 𝑘𝑥 𝑘 加速度之動量守恆式能夠描述車輛大部分時間並處於非均衡之狀態,以描述車輛之加 速度是受到前方車群之密度所影響。另外 Kerner 和 Konhauser(1994)則建立的另一形 式,能夠解釋更多的車流現象。其中包含紓解效果(relaxation)、壓力效果(pressure)和 黏性效果(viscosity): 𝜕𝑢 𝜕𝑡 + 𝑢 𝜕𝑢 𝜕𝑥= 𝑢𝑒(𝑘) − 𝑢 𝜏 − 𝑐02(𝑘) 𝑘 𝜕𝑘 𝜕𝑥+ 𝑣 𝜕2𝑢 𝜕𝑥2 此動量守恆式能描述車流的動態行為,可以解釋車流對均衡速度的反應、走停行為。 然而其模式仍有欠缺,Daganzo(1995)批評 PW 模式的缺失,即其無法呈現車流的非等 向性。流體和車流的不同點為流體粒子受到各個方向的刺激,而車體只受前方刺激影 響。再者,車與車之間的互動是不對稱的,並且車有各自的特性。因此使得日後有許 多新的車流理論被建立。 Denos(1962)提出於多車道的情境中,各個車道間的密度會相互作用影響,因此車 道之密度並不會受限於均衡情形下。在車流行進時,密度會上下震盪。而解決方法為 建立一兩車道交互作用之流量守恆式,並且考慮到反應時間在內。其假設條件為整個 高速公路系統內之車輛總數並無增加或減少,意即沒有出入口的設置;並車道密度假
10 設於縱段位置各自獨立。透過設定每個車道有各自之均衡流量外,並以自身車道與鄰 近車道之密度差做為主要影響因子。最後函數需要加上一敏感係數進行調整,若車流 量保持在少量時則敏感係數可為定值;反觀於車道擁擠時,就算有意願變換車道但受 限於車道擁擠而無法執行,故此時必須考量到敏感係數數值之增加。其研究顯示敏感 係數最大不得超過 0.9。 Zhang(1998)提出於非均衡下的車流模式,因為車流大多時間是處在非均衡狀態下。 其有三個假設,一為存在一均衡的速度密度基本關係;二為駕駛者對其前方的反應存 在著延滯;三為密度是車速的函數。並建構一微觀承接巨觀車流模式: 𝑑𝑥𝑛+1(𝑡 + 𝑇) 𝑑𝑡 = 𝑣𝑒(𝜌(𝑥𝑛+1+ ∆, 𝑡)) 其中 T 為舒緩時間。以泰勒展開式處理,而小客車會呈現時間跟空間上的反應。 其形式如下: 𝜕𝑢 𝜕𝑡 + 𝑢 𝜕𝑢 𝜕𝑥 = 𝑢𝑒(𝑟) − 𝑢 𝜏 − 𝛼𝑘(𝑢𝑒′(𝑘))2 𝜕𝑘 𝜕𝑥
其優點是除了改善原有 LWR 模式的問題之外,也解決反向車流(wrong way travel)的行 為,並 LWR 模式可視為其中一個特例。 Gupta 和 Katiyar(2007)建立一套非等向性連續流模式。在許多高階連續流模式中經 常存在逆向行駛的現象,而此模式包含一速度梯度項。其優點是能夠將等向性消除。 一般而言為了減少複雜度,常會視時間車距(headway)為密度之倒數,而此模式建立於 改善之跟車理論上,將時間車距以微擾級數的方式呈現之。並且進一步延伸,將之修 改成適用混合車流的形式。其原本加速度公式如下: 𝑑𝑣𝑛(𝑡) 𝑑𝑡 = 𝑎(𝑢𝑒(𝑏𝑛) − 𝑢𝑛(𝑡)) + 𝛼𝜆𝛥𝑢 𝜕𝑢 𝜕𝑡 + 𝑢 𝜕𝑢 𝜕𝑥 = 𝑎(𝑈̅(𝑘) − 𝑢) + 𝑎𝑈̅′(𝑘) ( 1 2𝑘 𝜕𝑘 𝜕𝑥+ 1 6𝑘2 𝜕2𝑘 𝜕𝑥2 − 1 2𝑘3( 𝜕𝑘 𝜕𝑥) 2 ) − 2𝛽𝑐(𝑘)𝜕𝑢 𝜕𝑥 再者,令整體的密度為各車種之密度加總,進而將式子改寫成: 𝑘(𝑥, 𝑡) = ∑ 𝑘𝑚(𝑥, 𝑡) 𝑀 𝑚=1
11 𝜕𝑢𝑚 𝜕𝑡 + 𝑢𝑚 𝜕𝑢𝑚 𝜕𝑥 = (𝑈̅𝑚(𝑘) − 𝑢𝑚) 𝜏 + 𝑎𝑈̅𝑚(𝑘) ( 1 2𝑘𝑚 𝜕𝑘𝑚 𝜕𝑥 + 1 6𝑘𝑚2 𝜕2𝑘 𝑚 𝜕𝑥2 − 1 2𝑘𝑚3 ( 𝜕𝑘𝑚 𝜕𝑥 ) 2 ) − 2𝛽𝑐(𝑘)𝜕𝑢𝑚 𝜕𝑥 其中𝛽為等向性指標。當𝛽趨近於無限大時,可以消除等向性特性。 Jin(2010)嘗試建立一連續流變換車道模式,用以描述高速公路的匯入與匯出。變 換車道通常都是因為兩車道上的情況不平衡,而透過修改基本關係式: 𝑢 = 𝑈(𝑘̅) = 𝑈(𝑘(1 + 𝜖)) 其中ϵ(x, t) =𝑁𝐿𝐶𝑡𝐿𝐶 𝑘𝐿𝑇 為變換車道強度變數。在微觀ϵ為駕駛的特性,巨觀裡則是地理位 置。將上式帶入到流量守恆式則成為: 𝑘𝑡+ (U((1 + ϵ)))𝑥 = 0 變換車道之車輛的基本關係圖形會因ϵ的加入而降低,代表道路容量下降、擁擠密度變 小,並多車道之換道行為於車流量稀少時可以忽略。 2.2.2 巨觀混合車流模式 Zhang 和 Jin(2002)提出一延伸的混合車流運動波模式。將自由車流速度設定成為 整體車流速率為各車種流量之加總,除以總車流密度: 𝑢𝑓= ∑𝑛 𝑘𝑖𝑢𝑓𝑖 𝑖=1 ∑𝑛𝑖=1𝑘𝑖 (𝑘𝑘1 2)𝑡+ ( 𝑘1𝑢(𝑘1, 𝑘2) 𝑘2𝑢(𝑘1, 𝑘2))𝑥= 0 最後將模式修改成守恆式樣式,並以三角形式的基本關係式呈現自由車流速率與雍塞 情況時之情形。此模式需要假設任何車種均以同一速度行駛,此為較不合理之處。而 其優點在於滿足先進先出規則,並且具有非等向性之特性。經由 Riemann 問題中求解, 得知其可描述特徵波與衝擊波之表現。 Logghe 和 Immers(2008)指出原本的連續流理論無法解釋走停行為和混合車流。則 其建立一混合車流的架構,流量守恆式的建構如下:
12 𝜕𝐾 𝜕𝑡 + 𝑄𝑒′ 𝜕𝐾 𝜕𝑥 = 0 其中 𝐾 = [𝑘⋮1 𝑘𝑛 ] , 𝑄𝑒′ = [ 𝜕𝑄𝑒1 𝜕𝑘1 … 𝜕𝑄𝑒1 𝜕𝑘𝑛 ⋮ ⋱ ⋮ 𝜕𝑄𝑒𝑛 𝜕𝑘1 … 𝜕𝑄𝑒𝑛 𝜕𝑘𝑛] 同時該研究以不同車種的道路使用程度作區分,其原理近似於車種密度上的差異。假 設車種 i 使用道路段的比例表示為𝛼𝑖,同等於車種的密度比例,在不同的模式中會以 不同的形式表現之。則可以將其與基本關係式結合: 𝑞𝑖 = 𝛼𝑖∙ 𝑄𝑒𝑖ℎ ( 𝑘𝑖 𝛼𝑖) 其針對混合車流以不同定義的𝛼𝑖之運動波模式做分類。可分成 7 種類別,分別是: 1. 多車種類別:當不同類的車種之駕駛行為都是固定時,可直接令𝛼𝑖 = 𝑘𝑖 𝑘𝑡𝑜𝑡。 2. 特別車道: Daganzo(1997)將 LWR 模式擴展成兩種車種,不同的車種可以行駛的 車道也有不同,其中𝛼𝑖 = 𝑚𝑖𝑛 ( 𝑘𝑖 𝑘𝑡𝑜𝑡, 𝑚𝑑 𝑚),𝑚為車道總數,𝑚𝑑則為可行駛的道路數。 3. 等空間:每種車有其各自的基本關係式,而車流量等於 𝑞𝑖 = 𝑘𝑖𝑄𝑒𝑖 ℎ(𝑘 𝑡𝑜𝑡) 𝑘𝑡𝑜𝑡 。 4. 等間距:由 Benzoni-Gavage 和 Colombo(2002)中所提出,假設不同種車之間的間距 都一樣,𝛼𝑖 = 𝑑𝑘𝑖+ 𝐿𝑖𝑘𝑖。 5. 車間距與車長成比例:Chanut 和 Buisson(2003)之作法令𝛼𝑖 = 𝑘𝑖 𝑘𝐽𝑖 ∑ 𝑘𝑛 𝑘𝐽𝑛 𝑁 𝑛=1 ,以擁擠密度 作為解釋可用之路段。 6. 等速率:如 Zhang 和 Jin(2002)的模式,將關係式寫成:𝑄𝑒𝑖ℎ(𝑘𝑖) =𝜏1 𝑖− 𝑘𝑖𝐿𝑖 𝜏𝑖 。此類表 示不同車種在道路上的占有比例和車輛密度的關係。 7. 使用者均衡:藉由 Wardrop 所提出的使用者均衡,最小化旅行時間並最大化其速度 的模式建構,意即沒有車輛能不透過影響慢車的速度來加速。再者,用三角形式的 基本關係式建構兩種車種的密度流量關係。
13 𝑄𝑒𝑖ℎ(k) = { 𝑘 ∙ 𝑢𝑓𝑖 𝑘 ≤ 𝑘𝑀𝑖 𝑘𝑀𝑖𝑢𝑓𝑖 (𝑘𝑀𝑖− 𝑘𝐽𝑖)∙ (𝑘 − 𝑘𝐽𝑖) 𝑘 > 𝑘𝑀𝑖 } 將情形分成三種:自由車流、半擁擠(semi-congestion)和擁擠。於自由車流時,各種車 輛皆由自由車流速率在移動,由流量偏微式可得到兩特徵波為各自之自由車流。半擁 擠的情形下,在使用者均衡的原則下慢車依然是處於自由車流速率行駛,而快車已經 經歷擁擠狀態,但依然可以在不影響慢車速度的情形下行駛最大速率。在擁擠狀態時 兩種車都無法以自由車流速率行駛,並小於慢車的自由車流速率。第一個特徵波就等 同於車流速率,第二個則為(weighted congestion branch)。其中提及 Newell(1998)的移 動瓶頸理論,將較緩慢的車形容成移動的瓶頸,其他車輛為了要超越慢車而產生了延 滯和容量降低。並探究了不同的情境下衝擊波的移動與改變。本篇研究係利用使用者 均衡之原則建構模式,並檢視於自由車流(Free flow)、同步流(Synchronized flow)、壅 塞車流(Wide moving jam)三種不同車流現象中的模式表現。
Colombo(2002)建立 2x2 雙曲線車流模式,其模式如下: 𝜕𝑞 𝜕𝑡 + 𝜕((𝑞 − 𝑞∗) ∙ 𝑢) 𝜕𝑥 = 0 𝑢(𝑘, 𝑞) = (1 𝑘− 1 𝑘𝑀𝑎𝑥) ∙ 𝑞 藉由最大密度𝑘𝑀𝑎𝑥和動量門檻𝑞∗使模式能夠描述車流特性。藉由檢視特徵波 (characteristic wave)可得知在高密度時剎車會產生衝擊波、加速會產生紓解波;密度低 時則相反。Gavage 和 Colombo(2003)進一步建立混合車流模式: 𝜕𝑘 𝜕𝑡 + 𝜕𝜓(𝑟)(𝑘1𝑈1, ⋯ , 𝑘𝑛𝑈𝑛) 𝜕𝑥 = 0 𝑢𝑖 = 𝜓(𝑙1𝑘1+ ⋯ + 𝑙𝑛𝑘𝑛)𝑈𝑖 其中𝑈𝑛為車種 n 的最大速度,𝜓(𝑟)為前方密度對車速的影響程度。由不同車種的車長 決定速度,但不同車種之間距皆固定。其可對於大小不同的車種進行應用。 Wong 和 Wong(2002)從 LWR 模式為基礎,發展出一具有異質性駕駛的混合車流 模式。每位駕駛會針對自己理想的速度來行駛,在特定車流密度之下會有一速度機率 分佈。當密度越高,速度的變異也會越小,因為越擁擠車輛的速度會被迫趨於一致。 整體車流的密度為各車種密度之加總,而所有車種都將遵守車流之基本關係式。文獻
14 中提到各車種的速度不僅受到自身密度影響,同時也受其他車種之密度影響。最後所 得出之流量守恆式如下: 𝜕𝑘𝑚(𝑥, 𝑡) 𝜕𝑡 + ∑ (𝑈𝑚𝛿𝑚𝑛+ 𝑘𝑚 𝜕𝑈𝑚 𝜕𝑘𝑛) 𝑀 𝑛=1 𝜕𝑘𝑚(𝑥, 𝑡) 𝜕𝑥 = 0, ∀𝑚, 𝑛 = 1,2, … , 𝑀 其中𝑈𝑚𝛿𝑚𝑛+ 𝑘𝑚𝜕𝑈𝑚 𝜕𝑘𝑛 為車種 m 對車種 n 的反應波速,亦即表現不同車種的特性。當 M=1 時就縮減成原本的 LWR 模式,也就是在均質之駕駛的情況下。其因以 LWR 模式 為基礎,故優點為方便執行,而能夠解釋的行為也相對較少。 Zhang(2003)認為在多車道的車流並沒有辦法維持等向性的特性,並且提出了一套 準則用以判定車流模式是否擁有此特性。等向性的特性出現係因波速度快過於車流的 速度,單車道的模式因沒有超車和變換車道的行為,故較具有非等向性之特性。 Ngoduy(2011)提到大部分的一階連續流模式因為簡單之特性而被廣為應用,卻仍 然無法描述散佈點(Widely scattered)形式的流量密度基本關係。經文獻得知高速公路之 容量對交通情形最為敏感,故以隨機變數的方式處理道路容量。令容量以 Weibull 形 式分佈,能描述非線性的車流現象如容量驟減。將整體的容量、擁擠密度和臨界密度 依據各個車種之小客車當量和車種比例決定。此以小客車當量之作法常被用於混合車 流模式中,卻無法正確描述機車在車流之間的行為。儘管高階的模式皆能描述非線性 隻車流事件,但因此方法之簡易程度,依然有其貢獻。 除連續流模式之外,尚有氣體動力模式之研究。氣體動力是在描述一群回小的氣 體分子在空間中產生隨機的行為。此類模式可被視為巨觀層級,其利用波茲曼公式描 述車流行為,並將車流視作氣體看待。最早由 Prigogine(1960)提出,以位置、速度、 理想速度、時間為變數解釋車流的相位空間密度。Wanger et al.(1996)建構一二階連續 流模式,其以類波茲曼模式(Boltzmann-like model)為基礎,將微觀的二階車流模式做 積分,進而導出巨觀車流模式。其形式如下: 𝜕𝑘 𝜕𝑡 + 𝑈 𝜕𝑘 𝜕ℎ Helbing(1997)以同樣方法進行多車道模式理論的探討。多車道模式必須考慮車與 車之間的互動行為,包括車道變換和超車行為。作者建立之流量守恆式如下:
15 𝜕𝑘̂𝑖 𝜕𝑡 + 𝜕 𝜕𝑟(𝑘̂𝑖𝑢) + 𝜕 𝜕𝑢(𝑘̂𝑖𝑓𝑖0) = (𝜕𝑘̂𝑖 𝜕𝑡)𝑎𝑑 + ( 𝜕𝑘̂𝑖 𝜕𝑡)𝑣𝑑+ ( 𝜕𝑘̂𝑖 𝜕𝑡)𝑖𝑛𝑡+ ( 𝜕𝑘̂𝑖 𝜕𝑡)𝑙𝑐+ 𝑢̂𝑖+(𝑥, 𝑢, 𝑢0, 𝑡) − 𝑢̂𝑖−(𝑟, 𝑢, 𝑢 0, 𝑡) 等號左邊第三項為加速度對相位空間密度的影響。等號右邊共有四部分:速度適應(ad): 藉由理想與實際的速度分佈差描述車流為追求理想速度對密度造成的影響。速度擴散 (vd):其中包含速度擴散函數,能夠描述因駕駛受到外在因素導致的速度波動。互動(int): 快慢車在相遇的時候有一定之超車機率。車道變換(lc):表示因車輛變換車道導致的密 度降低。車輛進出系統比率:則是表示系統中若有車輛進出亦影響整體車流密度。 然而其模式屬於微觀研究,巨觀則可將相位空間密度積分。則於巨觀中:𝑘𝑖(𝑥, 𝑡) = ∫ 𝑑𝑢 ∫ 𝑑 𝑢0𝑘̂𝑖(𝑥, 𝑢, 𝑢0, 𝑡) 𝑢𝑖(𝑥, 𝑡) = ∫ 𝑑𝑢 𝑢𝑃𝑖(𝑢; 𝑥, 𝑡) 最終所導出之單方向多車道車流模式,其考慮了車流的加減速、速度擴散、超車和換 道行為。Helbing(1998)解釋 PW 模式和 Bando 模式之間的關係。透過密度和車間距的 倒數關係自行假設車間距的分佈,並代入到高階的氣體動力模式中,完成巨觀和微觀 中間的連結: 𝜕𝑘 𝜕𝑡 + 𝑈 𝜕𝑘 𝜕ℎ= −𝑘 𝜕𝑈 𝜕ℎ 𝜕𝑈 𝜕𝑡 + 𝑈 𝜕𝑈 𝜕ℎ ≈ − 1 𝑘 𝜕(𝑘𝜃) 𝜕ℎ + 1 𝜏[𝑈𝑒(𝑘) − 𝑈] + 1 𝜏 𝜕𝑈𝑒 𝜕𝑘 ( 𝜕𝑘 𝜕ℎ𝛿ℎ + 𝜕2𝑘 𝜕ℎ2 𝛿ℎ2 2 ) 𝜕𝜃 𝜕𝑡 + 𝑈 𝜕𝜃 𝜕ℎ= −2𝜃 𝜕𝑈 𝜕ℎ− 2 𝜏𝜃 Hoogendoorn 和 Bovy(2000)提出以混合車流連續流模式。其中所用到的變數有三 種,分別為:速度、速度變異、密度。其偏微分公式如下: 𝜕𝑘𝑢 𝜕𝑡 + 𝑢 𝜕𝑘𝑢 𝜕𝑥 + 𝜕 𝜕𝑢(𝑘𝑢 𝑤𝑢(𝑢, 𝑢0) − 𝑢 𝜏𝑢 ) = ( 𝜕𝑘𝑢 𝜕𝑡 )𝑖𝑛𝑡 − + (𝜕𝑘𝑢 𝜕𝑡 )𝑖𝑛𝑡 + 於等號右邊兩項分別為與慢、快車之互動。各個車種以自己的理想速度作決策,並反 應到同一車流密度上。其中又可分成兩個部分,連續過程與非連續過程。連續過程包 含加速與調整到理想速度,非連續過程則為更換車道和減速。其加速度公式為:
16 𝑑𝑢 𝑑𝑡 = 𝑤𝑢 − 𝑢 𝜏𝑢 ≜ (1 − 𝜃𝑢) 𝑢0− 𝑢 𝜏𝑢0 + 𝜃𝑢 𝑤𝑓− 𝑢 𝜏𝑓 Cho 和 Lo(2002)更進一步建構動態多車道混合車流模式,其將道路視作二維空間, 其好處是可以考慮到機車並非一部接一部在行駛。此研究於右手項列入兩項,分別為 紓解(relaxation)和互動(interaction)。同樣是為了解是理想與現實速度之差距和車輛間 的相互影響。研究中以交通域(traffic field)來描述每輛車個體都有自己的區域,且會間 接影響到其他車輛。當兩車過於靠近時,車速會受到改變以避免碰撞發生。其形式如 下: 𝐸 =𝑒 𝜀∫ ((𝑘 − 𝑘𝛺 𝑠)/‖𝑋‖2)𝑑𝛺 模式如下: ∫ 𝜕𝑓(𝑥, 𝑢, 𝑡) 𝜕𝑡 𝑢 𝜒(𝑥, 𝑢, 𝑡)𝑑𝑢 + ∫ [𝑢 ∙ ∇𝑥𝑓(𝑥, 𝑢, 𝑡)]𝜒(𝑥, 𝑢, 𝑡)𝑑𝑢 𝑢 + ∫ [𝑒𝐸 ∙ ∇𝑢𝑓(𝑥, 𝑢, 𝑡)]𝜒(𝑥, 𝑢, 𝑡)𝑑𝑢 𝑢 = ∫ (𝜕𝑓(𝑥, 𝑢, 𝑡) 𝜕𝑡 )𝑐𝑜𝑙𝑙 𝑢 𝜒(𝑥, 𝑢, 𝑡)𝑑𝑢 等號左邊項為車與車遮間之互動關係。模式透過不同形式的𝜒(𝑥, 𝑢, 𝑡),分別代入 1, 𝑢, ‖𝑢 − 𝑢𝑒‖2可求得零次、一次、二次偏微的方程。文中提到一階式為流量守恆式, 二階為動量守恆式,三階為速度變異式,而更高階的方程於車流中已不具任何實質意 義,故沒有繼續開發之必要。其模式可延伸成混合車流之模式,透過兩個假設分別為: 各自車種皆有其自身的守恆式;道路上之空間皆被各車種所共用。故此,許多複雜的 變換車道問題可以被包含在內。 Minh et al.(2005)提到儘管距觀車流特性已被熟悉,卻很少有研究探討關於機車之 車流特性。其利用攝影機蒐集不同路段之機車車流資料,其中地點包含了機車專用道、 機車混合車流。在描述機車之速率、流量關係時因考慮到混合車流時,以機車當量處 理差異。同時針對機車速率與時間車距之分佈進行探討,結論指出不同的車流組成會 導致速率高低差異,包含機車專用道之地點的平均速率比其他地點高出約 10(公里/小 時);而平均時間車距則被測出為 1.16 秒,其範圍從 0.34 秒到 4.31 秒不等,其標準差 為 0.65 秒。
17 表 2.1 巨觀混合車流模式彙整表 作者 年分 模式基礎 車種間互動之處理 模式特性 Colombo, Gavage 2003 LWR 𝑢𝑖 = 𝜓(𝑙1𝑘1+ ⋯ + 𝑙𝑛𝑘𝑛)𝑈𝑖 考慮不同車種之車長 Wong, Wong 2002 LWR 𝜕𝑘𝑚(𝑥, 𝑡) 𝜕𝑡 + ∑ (𝑈𝑚𝛿𝑚𝑛+ 𝑘𝑚 𝜕𝑈𝑚 𝜕𝑘𝑛) 𝑀 𝑛=1 𝜕𝑘𝑚(𝑥, 𝑡) 𝜕𝑥 = 0 考慮不同個性之駕駛 行為 Ngoduy 2011 LWR 𝑞𝑐𝑎𝑝 = 𝑞𝑐𝑎𝑝0 ∑ 𝛼𝑛 𝛾𝑛 𝑁 𝑛=1 , 𝑟𝑐𝑟 = 𝑞𝑐𝑎𝑝 𝑣𝑐 = 𝑟𝑐𝑟 0 ∑ 𝛼𝑛 𝛾𝑛 𝑁 𝑛=1 密度與車道容量以隨 機變數呈現 Hoogendoorn, Bovy 2000 Gas kinetic 𝜕𝑘𝑢 𝜕𝑡 + 𝑢 𝜕𝑘𝑢 𝜕𝑥 + 𝜕 𝜕𝑢(𝑘𝑢 𝑤𝑢(𝑢, 𝑢0) − 𝑢 𝜏𝑢 ) = ( 𝜕𝑘𝑢 𝜕𝑡 )𝑖𝑛𝑡 − + (𝜕𝑘𝑢 𝜕𝑡 )𝑖𝑛𝑡 + 均考慮不同類車與同 類車種的互動 Gupta, Katiyar 2007 High
order 𝜕𝑢 𝜕𝑡 + 𝑢 𝜕𝑢 𝜕𝑥 = 𝑎(𝑈̅(𝑘) − 𝑢) + 𝑎𝑈̅′(𝑘)𝑇 − 2𝛽𝑐(𝑘) 𝜕𝑢 𝜕𝑥 非等向性 只適用單車道 Logghe, Immers 2008 LWR 𝑢𝑠𝑙𝑜𝑤𝑒𝑠𝑡 = min [𝛼1 𝑘1∙ 𝑄𝑒1ℎ ( 𝑘1 𝛼1) , 1 − 𝛼1 𝑘2 ∙ 𝑄𝑒2ℎ 𝑘2 1 − 𝛼1] 非等向性 以使用者均衡處理速 度競爭 Cho, Lo 2002 Gas kinetic 𝐸 =𝑒 𝜀∫ ((𝑘 − 𝑘𝛺 𝑠)/‖𝑋‖2)𝑑𝛺 交通域概念處理車流 互動 考慮速度變異
18
2.5 巨微觀混合介面轉換
本節將回顧巨微觀轉換介面過去研究之相關文獻,大部分著重在於介面前後資訊 是否對等,是否有資訊遺失。不同的研究對於介面的處理方式也不同。 Bourrel 和 Lesort(2003)提出以 LWR 模式和 LWR 模式之跟車理論進行巨微觀轉換。 其提到兩項限制:即轉換介面上之車輛必須守恆且資訊的傳遞必須正確。而巨微觀模 式遭遇的問題往往為巨觀圍觀模式之相容性,並如何成功地轉換資訊。此研究之環境 設定為單車道且為均質車種,目的為簡化問題。其模式透過供給需求之概念,並於介 面間設定一轉換空間。巨觀轉微觀之空間中,給定一連續之生產時間,當時間到達且 前方空間車距大於最小值時,則產生新的車輛。並藉由其與前方車輛之空間車距計算 其車輛速度。因為從流量轉換成車輛,故所產生之車輛數不一定為整數,但不影響到 轉換空間外的車輛情形。微觀轉巨觀之轉換空間中,則需要使用到虛擬車輛,以便顯 示空間車距。虛擬車輛之速度係以前方巨觀車流密度算出。經由模擬不同車流狀況, 發現仍然有少許不符合現實之情形產生,原因受到時階大小之影響。 Laval 和 Daganzo(2006)指出公路上的車間有車道轉換的行為,但很少有模式可以 解釋。故其建構一簡易之模式,其中包含易得到之參數分別是:理想的變換車道比率、 理想的直行比率、道路容量。模式中各車道均有其自身之流量守恆式,首先定義 l 車 道之淨車道變換率Φ𝑙,因此車道流量守恆式如下: 𝜕𝑘𝑙 𝜕𝑡 + 𝜕𝑞𝑙 𝜕𝑥 = Φ𝑙 微觀的面向則是考慮到將道路分段,以供給(道路容量)、需求(變換車道率)之概念銜接 格與格之間。在時間不連續之下,流量守恆式則如下所示: 𝑘𝑖𝑙𝑗+1− 𝑘𝑖𝑙𝑗 Δt + 𝑞𝑖𝑙𝑗 − 𝑞𝑖−1,𝑙𝑗 Δx = ∑ Φ𝑖−1,𝑙′𝑙 𝑗 − Φ 𝑖𝑙𝑙′ 𝑗 𝑙′≠𝑙 其混合模式所需要之參數只有紓解時間、自由車流速率、容量、擁擠密度,均於實地 方便取得,故為其優點。並於模擬比較後,驗證其可解釋瓶頸路段的流量下降,和移 動瓶頸之速度與其容量之關係。 Leclercq(2007)建立一混合 LWR 模式,其優點在於可以結合巨觀和微觀車流行為。19 巨觀和微觀之車流模式皆有其優點,而在龐大的路網下需要因應不同的需求,此時需 要使用混合模式。其研究以微觀和巨觀的層級解析 LWR 模式,並和理想速度模式產 生連結。以尤拉座標(Eulerian grid)描述巨觀模式,敘述觀察者在定點觀察車流狀況; 微觀層級則使用拉格朗日座標(Lagrangian grid)呈現,即觀察者隨著車流移動。利用 Daganzo(1995)和 Lebacque(1996)所提出的供給需求概念得知介面的流量,建立巨觀微 觀之轉換介面機制。並設置一儲存容量於介面上,以確保流量的守恆。隨著時間變化, 模式會更新巨觀之密度以及微觀車輛位置。此模式之特色在於介面點定義容易,不需 要一間格的轉換區域,也不需要使用虛擬車輛。在模擬的結果中可以清楚的看到衝擊 波的傳遞,且無延遲發生。 Leclercq 和 Moutari(2007)建立兩個高階混合模式,其基礎建立於微觀之主從模式 (Follow-the-leader model)和巨觀 AR 模式。因所檢視的面向不同,第一個混合模式為巨 觀-微觀 AR 模式,第二個則為中觀-微觀 AR 模式。從微觀看 AR 模式,令車輛(j-1)為 車輛 j 之領導者,空間車距對時間的變化為兩車之速度差除以空間變化。故時間和空 間的更新規則如下: 𝑠𝑗𝑛+1 = 𝑤 𝑗𝑛+1− 𝑉𝑚𝑎𝑥+ 𝑉𝑒( 1 𝜏𝑗𝑛+1) 𝑥𝑗𝑛+1 = 𝑥 𝑗𝑛 + Δ𝑡𝑢𝑗𝑛 其中w𝑗 = 𝑢 + 𝑉𝑚𝑎𝑥 − 𝑉𝑒(1𝜏)。而中觀的定義為描述車隊之行為,以車隊為單位,且令車 對中有 N 輛車。在離散的時空關係中,中觀的 AR 模式建構如下: {𝑠𝑖𝑛+1= 𝑠𝑖𝑛+ Δ𝑡 NΔ𝑥(𝑢𝑖−1𝑛 − 𝑢𝑖𝑛) 𝑤𝑖𝑛+1 = 𝑤 𝑖𝑛 在微觀轉巨觀的介面,以𝑄𝑖𝑛Δ𝑡 = min (𝑑 𝐷, Δ𝑋 Δ𝑥(1 − 𝜌𝑚𝑎𝑐𝑛 ))計算流入之流量。d 為潛在距離; D 為真正距離。再者更新下游車流密度和上游車輛位置。最後更新介面儲存容量,與 一階模式不同的部分在於,上個時階之容量加上流入流量後,假使大於 1,則需要扣 除整體的最小值,而巨觀轉微觀的介面則是以相反的邏輯運算。第二種混合模式為中 觀轉微觀,意即車隊轉換為車輛。其方法將中觀車隊拆平均切割空間,拆解成 N 個子 空間。
20
2.6 小結
回顧車流模式相關文獻,得知於不同面向之車流模式近期發展。於微觀車流模式 多屬於跟車模式之改善,或是針對細胞自動機之研究,較少研究將混合車種作為考量 要素。而細胞自動機之應用較多,因其簡易性緣故,具有較高的使用率。多篇研究也 使用細胞自動機描述機車車流行為。而反觀巨觀模式則因其能解釋整體車流特性,故 較容易建構多車道和混合車流模式。結構上巨觀車流理論可分為三大類:連續流模式、 高階模式、氣體動力模式。連續流模式之最大優點為其簡單,能延伸不同的情境設定。 而其最大缺點在於與實際車流情形不相符,且多數車流行為無法描述。高階模式則解 決此問題,卻也令模式複雜度增加,而近期模式多以此類為主。氣體動力模式則偏向 中觀層級,其好處即能夠對於車流間的相互影響(如變換車道、超車等)考慮在內,並 將速度變異表示能量守恆之關係,能更明確的描述車流。然而其問題為參數數量過多, 使用不易。而混合車流之研究,多數利用各車種擁有自身之理想速度、以車體長度或 占用道路比例區隔不同車種。巨觀微觀混合模式之研究有幾項議題被探討,一為巨觀 與微觀模式之相容性問題,二為兩模式之間的轉換過程是否流暢。然而,尚未有研究 同時顧及到巨微觀的轉換與混合車流和多車道環境,特別是包含機車混合車流,故此 處具有研究價值。本研究期望將機車混合車流納入考慮並探討機車與小客車之互動關 係,最後連結巨觀微觀之車流模式。並探討因受到號誌干擾之車隊等候與車隊消散之 行為。
21
第三章 模式建構
本研究之模式可分成巨觀、轉換介面、微觀三部分。為研究市區道路及相鄰近路 口之車流研究,靠近路口的車流行為較為複雜,故必須因應不同的地區特性採用不同 之車流模式。市區道路路段長度長且無側向干擾,故適合使用巨觀模式;反觀路口部 分,車輛行為較為複雜,故適合使用微觀車流模式驗證。而表 3-1 為本章註釋表。 表 3-1 模式變數參數註釋表 符號 意涵 符號 意涵 符號 意涵 𝑘𝑖 i 車種密度 𝑡𝑐 變換車道之時間 𝑢𝑓 條件自由車流速 率 𝑞𝑖 i 車種流量 𝑇 行駛實驗路段之總 時間 𝑘𝑗𝑚𝑎𝑥 擁擠密度 𝑢𝑖 i 車種速率 𝐿 實驗路段總長 𝑘𝑗 條件擁擠密度 𝜂 變動小客車當量 𝛼𝑙 𝑙車道之平均換道 次數 𝑘𝑚∗ 機車剩餘密度 𝜎 固定小客車當量 𝑁𝑐 變換車道車流之密 度比例 𝐼(𝑡) 儲存函數 𝛾 小客車當量最大 增量 𝛽𝑚 平均變換車道參數 𝜀 變換車道強度 𝑢𝑓𝑚𝑎𝑥 自由車流速率3.1 巨觀混合車流模式
為涵蓋長路段區域,需以巨觀車流模式處理。在巨觀混合車流模式中,可由車流 基本關係式𝑞 = 𝑘𝑢來描述車流的整體密度。此外,為求解包含三個變數之模式,令車 流速率為密度之函數,意即𝑢 = 𝑈(𝑘),此函數有多種不同形式。而其中車流包含機車 與汽車兩類車種,故將會分別得到兩者個別之密度。混合車流內車種間之相互互動和 變換車道之行為也需要被考慮在內。在國內市區道路中,機車無法行駛於內車道,小 客車則內外車道皆可行駛,故需要將不同車道分開考慮:22 𝜕𝑘𝑙 𝜕𝑡 + 𝜕𝑘𝑙𝑢𝑙 𝜕𝑥 = 𝑠𝑙(𝑥, 𝑡), ∀𝑙 ∑ 𝑠𝑙(𝑥, 𝑡) = 0 𝑙 此式表示車流之流量守恆,等號右邊項為各車道之淨變換車道率,其可表現出變換車 道的行為。另外假設此道路為封閉系統,故淨變換車道率之總和為零。其中流量為密 度與速率的相乘,而整體的車流密度可以被視為兩種車種之加總,整體流量則以變動 車當量來計算。為計算各車道之淨變換車道率𝑠𝑙(𝑥, 𝑡),將其形式寫作下式: 𝑠𝑙(𝑥, 𝑡) = 𝜑 ((∑ 𝑘𝑙′ 𝑙′≠𝑙 − 𝑘𝑙) − (∑ 𝑘𝑒𝑙′ 𝑙′≠𝑙 − 𝑘𝑒𝑙)) 其中𝜑為敏感係數,𝑘𝑙為車道𝑙之密度,𝑘𝑙′為鄰近車道𝑙′之密度,𝑘𝑒𝑙為車道𝑙之均衡密度。 當自身車道之密度低於兩旁鄰近車道時,鄰近車道之車輛會希望變換車道至本車道, 故此函數可描述車流會傾向變換到密度較低的車道上。而均衡密度表示車道自身於均 衡時之車道密度,故其為定值,以描述不同車道之特性。然而於近乎自由車流情形下 則不符合現實狀況,故須令敏感係數為一變動量,並取決於兩車道間之密度差。在求 解過程中,需要求解整體車流特性變數時,整體車流之密度與流量可以由下式表示: 𝑘 = 𝑘𝑎+ 𝜂𝑘𝑚 𝑞𝑖 = 𝑘𝑖∙ 𝑢𝑒 for 𝑖 = 𝑎, 𝑚 其中𝑘𝑎表示小客車之車流密度,𝑘𝑚表示機車車流密度。而車流整體密度為參考謝志偉 (民 99)所提出變動小客車當量之概念,用以描述機車混合車流。其中𝜂為一隨兩車種密 度之比例而變動之小客車當量,用以呈現整體車流密度。以往的機車混合車流研究都 以固定小客車當量轉換機車對於整體車流之貢獻,然而機車車流有穿梭和並排行駛之 行為,故此方法會造成計算上之偏誤,低估實際道路之密度。至於各車種之流量,則 可藉由各自之密度乘上均衡速率而得知。其中變動之小客車當量(𝜂)之形式,係以熵值 𝐻(𝑘𝑖)概念描述之,並呈現兩車之間密度比例關係。其考慮到當兩種車種分布情況均勻 時,表示車種間之互動越頻繁,變動車當量也越高;反之,當密度比例懸殊時則影響 較小,故可以呈現出混合車流車種間之互動影響。 𝜂 = 𝜎 + (𝛾𝐻(𝑘𝑖)) = 𝜎 − (𝛾 ∑ 𝑝𝑖(𝑘𝑎, 𝑘𝑚) log 𝑝𝑖(𝑘𝑎, 𝑘𝑚) 𝑖 ) 此變動小客車當量可用於求解車道間之變換車道率。另外,於多車道之環境中車輛能
23 夠變換車道,整體車流密度和限制變換車道之情況會不同,故實際之密度並無法直接 帶入車流基本關係式中計算。Jin(2010)提出變換車道行為對於車流而言假設密度會增 加,進而將所有變換車道之車輛於變換車道時間內以兩倍計算。其所使用之變換車道 模式已能夠描述於兩車道上之車流行為,然而尚未考慮到多車種問題。其研究中導入 有效密度之概念,將變換車道之車輛以兩倍計算,其形式如下: 𝑘̅ = 𝑘(1 + 𝜀(𝑘)) 其中𝜀(𝑘)為變換車道強度函數,用以呈現因變換車道所產生之差異。有效密度會比原 有之車流密度高。在非混合車流情況下,其形式可被為表示如下: 𝜀 = 𝛼𝑘𝑐𝑡𝑐 𝑘𝑇 其中𝑘𝑐為變換車道車輛之密度,𝑡𝑐為變換車道所花費之時間,𝑇為平均車輛行經路段所 花費之總時間,故其可被視為耗費在變換車道的時間佔所有行駛時間之比例。變數𝑘𝑐之 求解可藉由變換車道率求得,透過車種之車流密度乘上變換車道率即可求得,需要注 意因前述比率係由車道總密度計算而得,故換算機車變換車道密度𝑘𝑐𝑚則須除以變動 小客車當量以還原其密度。而變換車道強度函數應受到機車與汽車之密度影響,則形 式如下式所推算: 𝜀𝑖𝑙(𝑘𝑎, 𝑘𝑚) = 𝑡𝑐𝑁𝑐 𝑘𝐿𝑇 = 𝛼𝑙 𝑘𝑐𝑡𝑐 𝑘𝑇 = 𝛼𝑙 𝑘𝑐𝑡𝑐 𝑘𝐿𝑢 = 𝛼𝑙 𝑘𝑐𝑡𝑐𝑢 𝑘𝐿 = 𝛼𝑙 (𝑘𝑐𝑖𝑡𝑐𝑖)𝑢 (𝑘𝑎+ 𝜂𝑘𝑚)𝐿 , ∀ 𝑖 其中𝑡𝑐𝑎和𝑡𝑐𝑚為小客車和機車變換車道之時間,可經由文獻中取得相關數值並且代入 計算。𝑘𝑐𝑖為𝑖車種變換車道之密度可由淨變換車道率求得,𝑘𝑐𝑖 = 𝑘𝑖 ∙ 𝑠(𝑥, 𝑡);α為一密 度之函數,可被解釋成平均每車變換車道次數且受車道密度影響,𝐿為測量之路段長 度。然而於多車道情境下不同車道之車輛平均變換車道次數有差異,故需要分開來討 論。以一般三車道公路而言,分別以𝛼𝑙𝑒𝑓𝑡、𝛼𝑐𝑒𝑛𝑡𝑒𝑟、𝛼𝑟𝑖𝑔ℎ𝑡代表各車道車輛平均變換車 道次數。以𝛼𝑟𝑖𝑔ℎ𝑡為例,其位於道路最右端,變換車道只有一種行為,即移動至中間車 道。本研究假設車輛變換車道之原因為自身車道之速率不能滿意駕駛者,且鄰近車道 之密度較低。為求模式之簡化,故以線性形式考慮α,且以車流密度替代速率建構之。 此外需要考慮到其車道之均速率以下列形式描述: 𝛼𝑟𝑖𝑔ℎ𝑡 = 𝛽𝑟𝑖𝑔ℎ𝑡+ 𝛽1(𝑘𝑐𝑒𝑛𝑡𝑒𝑟− 𝑘𝑟𝑖𝑔ℎ𝑡) 𝛼𝑙𝑒𝑓𝑡則位置相反;至於𝛼𝑐𝑒𝑛𝑡𝑒𝑟則可以變換至兩旁的車道,需考慮到兩旁車道之個別密 度,分別以下式描述:
24 𝛼𝑐𝑒𝑛𝑡𝑒𝑟 = 𝛽𝑐𝑒𝑛𝑡𝑒𝑟+ 𝛽2(𝑘𝑟𝑖𝑔ℎ𝑡− 𝑘𝑐𝑒𝑛𝑡𝑒𝑟) + 𝛽3(𝑘𝑙𝑒𝑓𝑡− 𝑘𝑐𝑒𝑛𝑡𝑒𝑟) 𝛼𝑙𝑒𝑓𝑡 = 𝛽𝑙𝑒𝑓𝑡+ 𝛽4(𝑘𝑐𝑒𝑛𝑡𝑒𝑟 − 𝑘𝑙𝑒𝑓𝑡) 依據上述對於α之描述,可對參數進行假設。求得變換車道強度函數後,則可以進一 步代入得到整體車流受到變換車道情況下之密度與速率: 𝑢 = 𝑈(𝑘̅) 速度的函數有很多種不同的形式,本研究以 Greenshields(1935)所提出之線性車流基本 關係模式納入考慮,其優點為方便計算,其形式如下: 𝑢 = 𝑢𝑓(1 − 𝑘 𝑘𝑗) 其中𝑢𝑓為自由車流速率,𝑘𝑗為擁擠密度。因形式簡易故易於應用,然則此線性模式僅 適用於均質車流上。為考慮機車混合車流之車流特性,必須找出小客車與機車密度關 係式。可預期其型式為非線性,於小客車擁擠密度下,機車仍可以藉由穿梭而增加密 度。並考慮個別車種速率對於兩車種密度比例之關係,即可得到對應密度與速率關係。 首先考慮小客車平均速率與兩車種密度之比較,以往對於混合車流研究常以車種所佔 道路面積大小決定車種密度之關係,其可被解釋成線性關係: 𝑢𝑖 = 𝑢𝑖𝑓(1 − 𝑘̅𝑖 𝑘𝑗(𝑘𝑎, 𝑘𝑚)) Greenshields 所提出之速度密度關係式包含擁擠密度與自由車流速率兩參數,於均 質車流中為定值;於一般混合車流模式中則多以加權比例方式處理。然而因機車混合 車流之特性,假設於不同小客車與機車比例下之擁擠密度均不同。擁擠密度表示於壅 塞情況下到路上之車輛密度,而於機車混合車流因為機車體積小,而導致於小客車無 法移動的情況下,機車依然能夠繼續穿梭前進,故考慮兩車種間假設密度關係並非完 全線性。假設其關係圖如下:
25 圖 3-1 小客車與機車密度關係圖(一) 圖 3-2 小客車與機車密度關係圖(二) 在車流擁擠情況下,密度關係呈現負斜率,而小客車密度最大處,機車密度仍不 固定。假設任一時間點下之個別車種擁擠密度為當下車種密度比例之放大,意即從原 點延伸一直線經過當前車種密度比例點,與密度關係圖之交會點,此點為(𝑘𝑎𝑗, 𝑘𝑚𝑗)。 此處表示在目前車種密度比例下的擁擠密度。將此關係寫作函數則如下式所示: 𝑘𝑎𝑗(𝑘𝑎, 𝑘𝑚) = { 𝑘𝑎𝑗𝑚𝑎𝑥 , 𝑖𝑓 𝑘𝑎/𝑘𝑚≥ 𝑘𝑎𝑗/𝑘𝑚∗ 𝑘𝑎𝑘𝑎𝑗𝑚𝑎𝑥𝑘𝑚𝑗𝑚𝑎𝑥 𝑘𝑎(𝑘𝑚𝑗𝑚𝑎𝑥− 𝑘𝑚∗) + 𝑘𝑚𝑘𝑎𝑗𝑚𝑎𝑥 , 𝑖𝑓 𝑘𝑎/𝑘𝑚< 𝑘𝑎𝑗/𝑘𝑚∗ 其中𝑘𝑚∗代表機車剩餘密度,當小客車之密度到達擁擠密度時,機車因其體積小 且可穿梭於車陣中之特性,故機車密度上可持續增加,而可增加之密度差額即為機車 剩餘密度𝑘𝑚∗。然而此函數需要注意到邊界條件,當機車密度為零之情況則不適用,
26 並直接以小客車擁擠密度計算。而從機車速率與密度關係式中可求得密度𝑘𝑚∗時之速 率𝑢𝑚∗,如下列所示: 𝑢𝑚∗ = 𝑢𝑚𝑓(1 −𝑘𝑚∗ 𝑘𝑚𝑗) 當小客車與機車密度比例高於小客車均質車流擁擠密度除以機車剩餘密度時,道 路最多可承受之小客車擁擠密度同等於小客車均質車流擁擠密度;當比例較低時,則 道路最多可承受之小客車擁擠密度則會減少,而減少比例取決於小客車與機車面積比 例決定。當擁擠密度決定後,尚有自由車流密度尚未決定,考慮於機車密度固定時, 小客車平均速率與小客車密度之關係圖如下: 圖 3-3 小客車速率與密度關係圖 此情況之自由車流速率受到機車密度之影響,機車數量越多,小客車自由車 流速率越低。假設其影響關係函數如下: 𝑢𝑎𝑓= 𝑢𝑎𝑓𝑚𝑎𝑥(1 − 𝑘𝑚 𝑘𝑚𝑗) 計算出自由車流速率與擁擠密度後,即可決定當下之小客車速率。以相同方法可 以算出該時間點下之機車速率,並分別計算各車種下一時階之密度與流量。但有些許 差異,在密度比例較大時,機車擁擠密度為當時之機車密度。為求機車速率則以當時 之機車條件擁擠密度計算,意即當兩車種密度比例固定下之機車擁擠密度。其算式列 於此:
27 𝑘𝑚𝑗(𝑘𝑎, 𝑘𝑚) = { 𝑘𝑚𝑘𝑎𝑗𝑚𝑎𝑥 𝑘𝑎 , 𝑖𝑓 𝑘𝑎/𝑘𝑚 ≥ 𝑘𝑎𝑗/𝑘𝑚∗ 𝑘𝑚𝑘𝑎𝑗𝑚𝑎𝑥𝑘𝑚𝑗𝑚𝑎𝑥 𝑘𝑎(𝑘𝑚𝑗𝑚𝑎𝑥 − 𝑘𝑚∗) + 𝑘𝑚𝑘𝑎𝑗𝑚𝑎𝑥 , 𝑖𝑓 𝑘𝑎/𝑘𝑚 < 𝑘𝑎𝑗/𝑘𝑚∗ 圖 3-4 機車速率與小客車密度關係圖 在此考慮三角形式之車流基本關係,以臨界車流狀況作分段。故可將流量表示為: 𝑄(𝜀, 𝑘) = { 𝑢𝑖𝑓𝑘𝑖 𝑘𝑖∗ 𝑘𝑖𝑗 − 𝑘𝑖∗𝑢𝑖𝑓 𝑘𝑖𝑗− 𝑘𝑖(1 + 𝜀) (1 + 𝜀) 𝑖𝑓 0 ≤ 𝑘𝑖 ≤ 𝑘∗ 𝑖𝑓 𝑘∗ ≤ 𝑘 𝑖 ≤ 𝑘𝑗 其中𝑢𝑖𝑓為𝑖車種之自由車流速率,𝑘𝑖∗為𝑖車中之臨界密度。其中考慮多車道時變換車道 對於基本關係的影響,將上述之𝜀(𝑘𝑎, 𝑘𝑚)代入關係式內。考慮到汽機車混合車流時, 分別設定各車種之臨界參數值。
3.2 巨微觀轉換模式
在巨微觀介面轉換處,必須考慮到資訊的傳遞能夠順利,並且在車流與車輛間找 出轉換關係。回顧相關文獻之研究多以密度與空間車距(spacing)進行轉換,用兩者互 為倒數之關係來連結巨觀和微觀之車流理論。密度之概念為每公里佔有多少車輛;而 空間車距則是代表車與車之間的距離差距,雖然兩者並不全然相等,卻: 𝑘𝑖(𝑥, 𝑡 → ∆𝑡) = 1 𝑠𝑖𝑡(𝑥, 𝑡) 在處理巨觀轉微觀之介面處,Leclercq(2007)提到以介面兩邊之供給需求作為連結。其28 模式適用於單車道均質車流上,優點在於介面點上,在上游之需求量與下游之供給量 中取最小者為該處之車流流量,意即: 𝑞(𝑥, 𝑡) = 𝑚𝑖𝑛 (∆(𝑥−, 𝑡); 𝛺(𝑥+, 𝑡)) 其中上游需求可被寫作: ∆(𝑘) = { 𝑘𝑈(𝑘) 𝑖𝑓 𝑘 ≤ 𝑘𝑞∗ 𝑖𝑓 𝑘 > 𝑘∗∗ 下游供給可被寫作: 𝛺(𝑘) = {𝑞 𝑘𝑈(𝑘) 𝑖𝑓 𝑘 > 𝑘∗ 𝑖𝑓 𝑘 ≤ 𝑘∗∗ 當上游車流量尚未達臨界情況,表示此時道路尚未出現擁擠情況,則需求可被定義為 即將進入下游之車輛數;反之則因擁擠狀況產生,流量無法超過車流臨界流量而以最 大值代表。而供給量可被視為下游能夠通過之車輛數,以道路容量為基礎。當車流尚 未到達臨界狀況時,所供給的容量持續保持最大量;反之則會因擁擠而降低。在微觀 模式中則以空間車距作為輸入量,以∆(𝑥, 𝑡)為上游輸入量,Ω(𝑥, 𝑡)為下游供給量: ∆(𝑥, 𝑡) = { 𝑞∗ 𝑖𝑓 𝑠 𝑛 < 𝑠∗ 𝑈(𝑠1 𝑛) 𝑠𝑛 𝑖𝑓 𝑠𝑛 ≥ 𝑠∗ Ω(𝑥, 𝑡) = { 𝑈(𝑠1 𝑛) 𝑠𝑛 𝑖𝑓 𝑠𝑛 < 𝑠∗ 𝑞∗ 𝑖𝑓 𝑠 𝑛 ≥ 𝑠∗ 於巨觀轉微觀之介面上因需要產生車輛,則給予保存函數𝐼(𝑡),其數值介於零到一之 間,意即𝐼(𝑡)𝜖[0,1]。當𝐼(𝑡)超過 1 時則於介面間產生車輛,並令𝐼(𝑡) = 𝐼(𝑡) − 1重新計 算。然而此模式只適用於均質車流中,故必須將模式擴充成為混合車流模式。為同時 考慮機車的產生,故將不同車種之產生方式分開考慮。其中保存函數受到該車種流量 影響,隨時間累積。其形式如下: 𝐼𝑖(𝑡 + ∆𝑡) = 𝐼𝑖(𝑡) + 𝑞𝑖(𝑥, 𝑡)∆𝑡 在道路壅塞之情形下可能會發生機車流量過高。導致機車之保存函數大於 2 的情 況,此時同時生產兩輛機車於介面,並令𝐼(𝑡) = 𝐼(𝑡) − 2。車輛產生之位置決定則需要 考慮到鄰近下游路段之車流狀況,而微觀混合車流模式之部分將於 3.3 章節說明。不 同的車種會使用各自車種之流量以進行車輛之產生,而個別密度則是作為整體車流密