國立臺灣大學工學院工程科學及海洋工程學系 碩士論文
Department of Engineering Science and Ocean Engineering College of Engineering
National Taiwan University Master Thesis
單軸追日太陽光發電系統最佳發電智能控制研究 Optimal Power Output and Smart Control of
One-Axis Sun Tracking PV System
鍾琦嶢 Chi-Yao Chung
指導教授:李坤彥 教授 黃秉鈞 教授 Advisor: Kung-Yen Lee, Ph.D.
Bin-Juine Huang, Ph.D.
中華民國 105 年 7 月
II
誌謝
短短兩年的碩士生涯宛如白駒過隙,轉眼即將告一段落,即將邁入人生下個里 程碑,在碩士期間有太多的要感謝的人…。
首先,衷心感謝指導老師 李坤彥教授與共同指導老師 黃秉鈞教授的諄諄教 誨,不只在學業上教導琦嶢專業知識,以及在面對問題時所應具備的態度與方法,
更傳受了許多可貴的人生哲理與經驗,使琦嶢受益良多。
接者,感謝吳大哥、葉大哥、伯賢大哥的耐心協助,宛亭姊姊的細心照料,阿 甘學長的用心教導。感謝學弟妹 傅喬、家翬、少樺 讓實驗室增添了許多歡樂。感 謝同儕 聖中、憲陽 兩年的互相扶持,並感謝同儕 家瑋、子喬、信宏 一年來的照 顧與協助。很高興能與你們一同努力打拼,完成這得來不易的碩士學位。
最後,琦嶢要感謝父母的辛勤栽培,不僅教導琦嶢在做人處事明白事理,更支 持琦嶢完成學業。
一路走來,接受大家很多幫助和照顧,非常感謝大家。最後,我要將此論文獻 給所有曾經幫助我、鼓勵我、關心我的家人及朋友們。
琦嶢 謹識 2016/07/21
單軸追日太陽光發電系統最佳發電智能控制研究
鍾琦嶢* 李坤彥** 黃秉鈞***
國立臺灣大學
工程科學及海洋工程研究所
摘 要
本研究旨在發展單軸追日太陽光電系統最佳發電控制技術(one-axis maximum- power generation),探討降低搜索頻率與搜索範圍對發電量之影響。並透過系統長 期搜索與學習,發展最佳太陽板姿態智能化學習與控制技術(smart learning and control of PV position)。另一方面,為改善時鐘 IC 與太陽時間之差異,加入智能型 太陽時鐘校正技術(smart solar clock)以提升系統可靠度。
本研究於兩種不同測試環境(住家和大樓)下進行兩種最佳發電控制方法:(1)降 低搜索頻率、(2)窄化搜索範圍。從測試結果可得知,採「降低搜索頻率」會使發電 量略為提升;採「窄化搜索範圍」則在住家環境下約可提升 21%的發電量,因本方 法可大幅減少隨機環境變因干擾所產生之誤判情形。
透過智能化學習與控制,可成功推測未來最佳太陽板姿態。此控制方法每周僅 需搜索三天,減少單軸裝置的磨耗率,提高系統可靠度與使用年限。
此外,智能型太陽時鐘校正技術在長期測試與失效模擬試驗下,皆能有效地將 時鐘 IC 校正為太陽時鐘,使追日裝置運作正常。
關鍵字:單軸追日控制技術;太陽板姿態智能化學習與控制;智能型太陽時鐘
* 研究生
** 指導教授
*** 共同指導教授
Optimal Power Output and Smart Control of One-Axis Sun Tracking PV System
Chi-Yao Chung* Kung-Yen Lee** Bin-Juine Huang***
Department of Engineering Science and Ocean Engineering, National Taiwan University
Abstract
This study proposes a development of one-axis maximum power generation technique (1A-MPG) and discusses the impact of the frequency and range on the power generation. From the long-term tracking and learning, we developed a smart learning and control technique for the PV position system. We further added the smart solar clock calibration technology to improve the stability of PV system.
Two developed control methods decreasing the frequency of tracking and narrowing range of tracking were used in two separated environments. The experimental results indicate that the power generation was slightly increased by using the method of decreasing the frequency of tracking. Also, through using the method of narrowing range of tracking in the home environment, the total power generation increased about 21%.
This result indicated that using the method of narrowing range can reduce the effects of the environmental disturbance.
The PV position can be inferred through optimizing the machine learning and control.
The one-axis tracking mechanism only needs three days for the sun tracking per week.
This technique decreases much needless moves of the one-axis tracking system and
improves the PV system reliability.
From the long-term field and failure test, timer IC calibration can functionally work through the smart solar clock calibration technology. In conclusion, the research approved that the one-axis sun tracking PV system with the solar clock calibration technology is more reliable.
Keywords: One-axis tracking control; Smart learning and control of PV position;
Smart solar clock
* Graduate Student
** Advisor
目錄
誌謝 I 摘 要 II Abstract IV 目錄 VI 圖目錄 VIII 表目錄 XI
緒論 ... 1
1.1 研究動機 ... 1
1.2 文獻回顧 ... 2
1.3 研究目的 ... 3
1.4 研究內容 ... 4
單軸追日機構與追日控制系統設計 ... 5
2.1 單軸追日機構設計 ... 5
2.2 單軸追日最大功率發電控制系統(1A-MPG)設計 ... 9
2.2.1 控制系統架構 ... 9
2.2.2 控制器硬體設計 ... 13
2.2.3 控制器軟體設計 ... 19
2.3 單軸追日最大功率發電控制系統(1A-MPG)整合 ... 22
單軸追日智能化搜索對發電量之影響研究 ... 25
3.1 單軸追日發電量最佳化控制原理 ... 25
3.2 縮減搜索頻率對發電量之影響 ... 31
3.3 縮減搜索範圍對發電量之影響 ... 33
3.4 縮減搜索頻率與搜索範圍對發電量之影響 ... 37
最佳太陽板姿態智能化學習與控制 ... 41
4.1 最佳太陽板姿態智能化學習與控制設計概念 ... 41
4.2 最佳太陽板姿態智能化學習與控制測試分析 ... 43
智能型太陽時鐘(solar clock)技術研究 ... 49
5.1 日出日落智能診斷 ... 50
5.1.1 太陽電池特性測試 ... 50
5.1.2 日出日落診斷方法 ... 54
5.2 太陽時鐘智能校正 ... 56
5.2.1 太陽時間(solar time) ... 56
5.2.2 太陽時鐘校正方法 ... 57
5.2.3 太陽時鐘校正流程 ... 63
5.3 採智能型太陽時鐘的 1A-MPG 系統測試 ... 65
結論與未來展望 ... 68
6.1 結論 ... 68
6.2 未來展望 ... 69 參考文獻 70
圖目錄
圖 2.1-1 單軸追日機構設計圖 [4]... 5
圖 2.1-2 單支撐柱 ... 6
圖 2.1-3 太陽電池固定框架(H-frame) ... 7
圖 2.1-4 推桿致動器實際安裝 ... 8
圖 2.2-1 1A-MPG 單軸追日太陽光電系統架構 ... 9
圖 2.2-2 太陽光電系統充放電圖 [4]... 10
圖 2.2-3 充放電控制器控制流程圖 ... 11
圖 2.2-4 230Wp 太陽電池特性曲線 [16] ... 12
圖 2.2-5 1A-MPG 控制器實體圖 ... 13
圖 2.2-6 1A-MPG 控制器放至於防水盒並在接頭處加入 O 形環 ... 14
圖 2.2-7 1A-MPG 單軸追日控制器完整電路設計圖 ... 15
圖 2.2-8 推桿內部控制電路示意圖與對應之推桿長度 ... 16
圖 2.2-9 MCP79410 備用電源示意圖 [17] ... 17
圖 2.2-10 電流量測組件(包含防水接頭)... 18
圖 2.2-11 單軸追日太陽光電系統最佳發電控制流程圖 ... 19
圖 2.2-12 單軸控制器面板控制 ... 20
圖 2.2-13 1A-MPG 系統監測畫面 ... 21
圖 2.3-1 1A-MPG 追日系統實體架構 ... 22
圖 2.3-2 1A-MPG 系統架設於大樓頂樓(第一系統) ... 24
圖 2.3-3 1A-MPG 系統架設於住家平房(第二系統) ... 24
圖 3.1-1 單軸追日最佳發電控制概念 ... 25
圖 3.1-2 太陽光抵達太陽電池表面的變化示意圖 ... 26
圖 3.1-3 相鄰 1A-MPG 機座產生互相干擾情形 ... 27
圖 3.1-4 角度定義 ... 28
圖 3.1-5 直接搜索法控制流程圖 ... 29
圖 3.2-1 直接搜索法縮減搜索頻率對發電量之影響(第一系統)... 32
圖 3.3-1 三座 1A-MPG 朝東 50°傾角(下午時間) ... 33
圖 3.3-2 第三座 1A -MPG 轉動情形... 33
圖 3.3-3 第三座 1A –MPG 最佳停駐角 ... 34
圖 3.3-4 第二座 1A -MPG 轉動情形... 34
圖 3.3-5 第二、三座 1A –MPG 最佳停駐角 ... 34
圖 3.3-6 第一座 1A -MPG 轉動情形... 34
圖 3.3-7 第一、二、三座 1A –MPG 最佳停駐角 ... 35
圖 3.3-8 直接搜索法縮減搜索範圍對發電量之影響(第一系統)... 35
圖 3.3-9 直接搜索法縮減搜索範圍對發電量之影響(第二系統)... 36
圖 3.4-1 直接搜索法縮減搜索頻率及搜索範圍對發電量之影響(第一系統)... 37
圖 3.4-2 直接搜索法縮減搜索頻率與搜索範圍對發電量之影響(第二系統)... 38
圖 3.4-3 第二系統直接搜索法縮減搜索頻率與搜索範圍對發電量之影響(輻射量 小於 10MJ/m2 day) ... 39
圖 3.4-4 直接搜索法縮減搜索頻率與搜索範圍對發電量之影響(第二系統)... 40
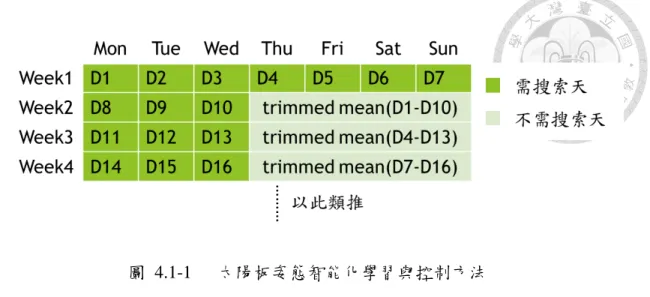
圖 4.1-1 太陽板姿態智能化學習與控制方法 ... 42
圖 4.2-1 最佳太陽板姿態智能化學習與控制對發電量之影響(第一系統)... 43
圖 4.2-2 2016/03/31-2016/06/15 三座單軸裝置不轉動搜索天的停駐角度平均值 ... 45
圖 4.2-3 1A-3P 一天當中的遮陰情形 [4] ... 45
圖 5.0-1 智能型太陽時鐘校正架構圖 ... 49
圖 5.1-1 太陽電池(460Wp)電流量測曲線 ... 51
圖 5.1-2 小型太陽電池(SC4112_AY)電壓量測曲線 [10] ... 51
圖 5.1-5 電流訊號判別法示意圖 ... 55
圖 5.2-1 台北地區每日時差圖 ... 56
圖 5.2-2 第一系統每日量測太陽午時誤差圖 ... 57
圖 5.2-3 第二系統每日量測太陽午時誤差圖 ... 59
圖 5.2-4 日出日落天氣型態對量測太陽午時影響之示意圖 ... 60
圖 5.2-5 第一系統每週太陽午時誤差變化(平均值與標準差)... 61
圖 5.2-6 第二系統每週太陽午時誤差變化(平均值與標準差)... 61
圖 5.2-7 智能型太陽時鐘校正流程圖 ... 64
圖 5.3-1 第一、第二系統智能診斷系統皆選擇 No.2 太陽電池做為感測器 ... 65
表目錄
表 2.3-1 兩套獨立太陽光電系統詳細規格 ... 23
表 4.2-1 2016/03/31-2016/06/15 第一系統 No.1 太陽板停駐角度... 46
表 4.2-2 2016/03/31-2016/06/15 第一系統 No.2 太陽板停駐角度... 47
表 4.2-3 2016/03/31-2016/06/15 第一系統 No.3 太陽板停駐角度... 48
表 5.2-1 第一系統每日量測太陽午時與誤差 ... 58
表 5.2-2 第二系統每日量測太陽午時與誤差 ... 59
表 5.3-1 第一系統調慢時鐘之失效實測校正前後誤差表 ... 66
表 5.3-2 第二系統調快時鐘之失效實測校正前後誤差表 ... 67
緒論
1.1 研究動機
傳統固定式太陽板多半設置在寬廣且地面平坦地區,因架設空間上較不需考 量空間限制,所以在設計上往往搭載了相當數量的太陽電池,才能有足夠的發電 量,然而如此大型裝置難以架設在空間有限的都市地區。
因此,為改善太陽板安裝在都市地區空間有限之問題,台大於 2007 年發表建 築一體化的單軸三角度追日發電技術(one-axis 3-position sun tracker, 1A-3P) [1, 2, 3],
採與建築整合設計(Building-Integrated Photovoltaic, BIPV),可直接與女兒牆或樓 梯間立面牆作結合,使太陽板高於建築物可有效降低遮蔭,進而提升發電量。此技 術安裝不佔空間,適合應用於空間有限的都市地區,且每座機構可搭載兩片 230Wp 太陽板,分散式地安裝在各處,在現有裝置基礎下,利用推桿伸縮轉動太陽板增加 太陽輻射接受量。追蹤機構簡單輕巧、控制動作單純、安裝容易,但若裝設在不同 環境下,太陽能板則容易受到周遭建築物遮蔭影響。
單軸三角度追日發電技術(1A-3P)是透過每日定時改變太陽板轉動角度,與搭 載之太陽板的發電情況無關,若安裝環境較複雜則容易受遮陰影響,使太陽光電系 統無法發揮最大效益。因此發展出單軸最大功率發電控制(one-axis maximum power generation, 1A-MPG) [4],利用 1A-3P 的單軸機構裝置,以時鐘 IC 做為基準,定時 控制自動搜索(每天九次),找到最大太陽板發電量的停駐角度,使環境影響降至最 低,進而提升發電量。同時,過於頻繁搜索過程中會產生較多耗能,使故障率隨之 提高,再加上時鐘 IC 錯亂、故障等問題。有鑑於此,本論文以單軸最大功率發電 控制為研究主題,致力於解決前述 1A-MPG 之問題並提升系統的可靠度。
1.2 文獻回顧
過去團隊成員鄭宏彥 [4]、楊煌偉 [5]所發展的單軸追日最大功率發電控制技 術(1A-MPG),有別於以往對太陽進行全天候追蹤的控制方法 [6, 7, 8],不僅可降 低系統的複雜性以及高故障率等問題,而其利用「定時智能搜索」1 之控制方式改 變太陽板的停駐角度,並加入時鐘 IC 作為控制元件。全系統無光感測器,減少感 測器所需之成本以及降低感測器故障、易受環境干擾等問題。
最大功率發電控制技術有兩種控制方法:直接搜索法(direct search method)、最 大功率追蹤法(maximum-power tracking method),皆採整點追蹤控制(08:00 ~16:00),
每日轉動搜索次數共九次。以十年來計算,每座單軸轉動搜索次數高達 32,850 次,
再加上每次轉動搜索範圍廣(-50°~+50°),對系統裝置的磨耗性是一大考驗。過於頻 繁的搜索大大增加系統裝置的磨耗,進而提高汰換率。因此,本研究為解決前述之 1A-MPG 缺失,優化控制策略,採縮減搜索頻率、搜索範圍,並探討此方法對發電 量之影響。而本研究將此控制技術延伸發展,加入智能化學習法,使 1A-MPG 在 縮減搜索頻率的同時亦能維持其發電量。
另一方面,時鐘 IC 在長時間使用下可能會累積誤差,儘管十年僅有 30 分鐘 的誤差 [2],但其仍有故障之可能;又時鐘 IC 是依據標準時間(standard time)所設 定,與太陽時間(solar time)不符相同,少則數十分鐘,多則數小時(如新疆地區)。
前述種種原因都有可能影響到 1A-MPG 系統的性能,使系統無法發揮最佳效益。
故,過去團隊成員丁偉倫 [9]、黃伊成 [10]分別利用熱電晶片及小型太陽電池 作為感測器,觀察太陽的日出日落時間,當時鐘累積誤差超出容許範圍,即進行智 能校正。但,前述之兩種方法皆需額外加裝感測器才能進行校正,不僅增加成本也 可能受到環境干擾。因此,本研究另一研究重點為利用系統所搭載的太陽板作為感 測器,發展智能型太陽時鐘校正技術,來消弭時間誤差,此方法不需要額外佈線,
並可減少感測器本身的耗費成本、衰退等問題,且能在不同地區使用,進一步提高
1.3 研究目的
單軸追日太陽光電系統最大功率發電控制(one-axis maximum power generation, 1A-MPG)是一項相當重要的技術,可實地應用於都市地區。透過之前的研究證明其 可適應於不同安裝環境下。本系統具設計簡單、組裝容易、安裝不佔空間(BIPV)之 特點,但在控制方法上尚有些缺失待改進:搜索頻率過於頻繁、時鐘 IC 在長時間 使用下會產生累積誤差等問題。因此,本研究將針對單軸控制技術進行改善,並加 入智能型太陽時鐘使時鐘 IC 能夠在長時間下正常運行。
具體而言,本研究主要研究目的共有兩項:
(1) 發展單軸追日最佳發電控制技術(1A-MPG),減少追日動作與耗能、並降 低故障率。
(2) 發展智能型太陽時鐘(solar clock)修正時鐘 IC,消除時鐘誤差提升系統可 靠度。
1.4 研究內容
本研究沿用過去團隊成員鄭宏彥 [4]、楊煌偉 [5]所架設兩套獨立型的太陽光 電系統,針對直接搜索法進行縮減搜索頻率與搜索範圍之控制方法,探討在不同安 裝環境、控制方法對發電量之影響,力求在縮減頻率下依然能維持系統發電量。同 時,在直接搜索法控制基礎下,延伸發展最佳發電的太陽板姿態智能化學習與控制 技術,藉由長時間的搜索以建立資料庫,並以簡單運算方式預測未來太陽板停駐角 度,使 1A-MPG 不需啟動轉動搜索功能也可推算出最佳太陽板姿態。
本研究另一研究重點為利用系統所搭載的太陽板作為感測器,發展智能型太 陽時鐘校正技術,用來校正標準時間與太陽時間之誤差,提升單軸追日太陽發電系 統的可靠度。
總結上述重點,本論文研究的主要內容可歸納如下:
1. 智能化搜索對發電量之影響研究
(1) 智能化縮減直接搜索法的搜索頻率對發電量之影響 (2) 智能化縮減直接搜索法的搜索範圍對發電量之影響 2. 最佳發電的太陽板姿態智能化學習與控制
3. 智能型太陽時鐘(solar clock)技術研究
本文章中的第二章節主要介紹兩個系統的架構,再來第三章針對智能化搜索 對發電量之影響研究,以找到最佳搜索方法。而第四章則是延伸發展最佳發電的太 陽板姿態智能化學習與控制之研究,藉由長期蒐索結果推算未來的停駐角度。最 後,第五章則是針對系統加入智能型太陽時鐘(solar clock)技術,並探討可否成功發 揮其功效,目的為提升系統可靠度。
單軸追日機構與追日控制系統設計
2.1 單軸追日機構設計
本研究機構部分,延續第五代單軸追日裝置的模組化設計 [5],係由簡單的三 大組件構成(如圖 2.1-1):(1)單支撐架、(2)太陽電池固定框架、(3)致動器(推桿)。
一座追日機構可搭載 2 片 230~250Wp 太陽電池,使其有效地利用空間。
圖 2.1-1 單軸追日機構設計圖 [4]
(1)
單支撐架(T-Bar)
單支撐架(T-Bar)用來與牆面結合,而固定於牆面方式採左右排列,藉由力矩平 衡將主支撐軸緊緊固定在女兒牆上,減少在強風吹襲下左右搖晃之情況。在 T-bar 中間採用ㄇ字型角鐵,使支架更牢固,以提升整體追日機構的強度,如圖 2.1-2 所 示。
而軸承組直接固定於 T-bar 上,只需透過搭配螺絲、螺帽即可與 H-frame 結合 組裝。目的為使機構簡單、具有高支撐強度特性,而材料及表面處理上具防鏽效果、
耐候性極佳等特性。
圖 2.1-2 單支撐柱
(2)太陽電池固定框架
太陽電池固定框架組件是用來連結主支撐軸與太陽電池之用,為了使空間有 效率地被利用,同時提高 PV 發電量,每座追日裝置可放置兩個 230Wp 太陽電池。
固定框架則採用 H-frame 式的支撐方式(如圖 2.1-3),由 PV 扣具與支撐架藉由螺 絲、螺帽去作結合,使 PV 扣具與太陽電池能緊密地結合,如圖 2.1-1 編號 1 所示。
此設計優點是組裝便利,可縮短安裝時間,且不必破壞太陽電池的外框。因固 定框架彼此互相連結,兩個太陽板間的縫隙極小,使結構上更加穩固,如圖 2.1-1 編號 3 所示。
圖 2.1-3 太陽電池固定框架(H-frame)
(3)致動器(推桿)
本研究主要利用推桿伸縮的長度變化來改變太陽板姿態,採用技術成熟的市 售線性推桿。推桿內建可變電阻定位器,根據其伸縮長度可回傳相對應之訊號值,
再利用幾何關係計算出停駐角度所對應的推桿長度,並可利用可變電阻定位器之 訊號作控制動作。
由於成本考量,選用恰好符合機構設計及強度之推桿,但長期使用後發現部分 推桿內建的可變電阻定位器有進水之現象,造成定位器異常。推斷其原因為防水膠 條受到氣候變化及強颱風雨影響而斷裂,失去防水的效果,造成下豪大雨時,雨水 易經由推桿伸縮處流入下方的主控制處。為防止上述現象發生,在防水膠條上面再 額外塗上一層防水膠,使其多一層保護機制,且為避免雨水滲入影響電阻定位器之 功能,安裝方式則採用倒裝方式,如圖 2.1-4 所示。
圖 2.1-4 推桿致動器實際安裝 推桿
2.2 單軸追日最大功率發電控制系統(1A-MPG)設計
2.2.1 控制系統架構
本研究將單軸追日裝置所承載的太陽光發電系統設計採用 nMPPO 技術,系統 架構如圖 2.2-1 所示。此系統分為六大部分:(1)太陽板、(2) 1A-MPG 控制器、(3) 電池充放電控制器、(4)蓄電池、(5)負載、(6)監控設備。
圖 2.2-1 1A-MPG單軸追日太陽光電系統架構
本研究所架設之實驗場所均採圖 2.2-1 之系統架構,設置地點分別為大樓頂樓 與住家環境。兩套太陽光電系統所使用太陽電池、蓄電池及負載(燈泡;冷氣機)均 使用現成的市售產品。
本小節將針對充放電控制器方面做詳細介紹:大樓頂樓採用實驗室自行研發 的 i-Scon2 充放電控制器,並具有量測充電電壓和電流之功能;住家環境則使用實 驗室開發之隔離混合型太陽光發電系統(hybrid photovoltaic system, HyPV) [11]以及 其電力切換控制技術,讓太陽光電系統在市電與太陽能兩種供電模式切換,並搭配
逆變器將直流轉交流來驅動負載。
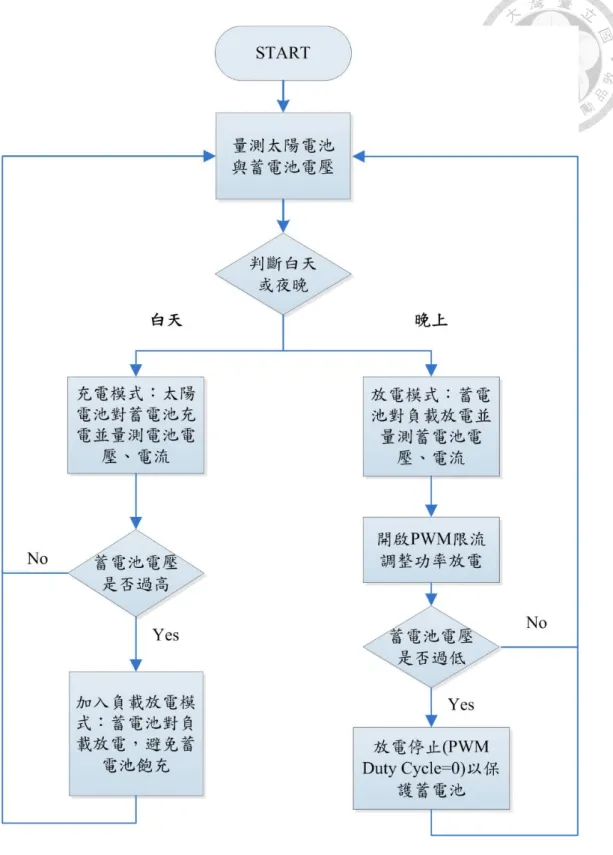
雖然這兩套系統採用兩種不同充放電控制器,但這兩種控制器皆藉由量測太 陽電池與蓄電池的電壓進行充放電切換,因此不影響 1A-MPG 控制器的追日性能 測試。圖 2.2-3 為頂樓所採用之 i-Scon2 充放電控制器針對單軸追日控制流程圖,
其充放電模式分為白天與夜晚兩種:
(1) 白天充放電模式
日出時,太陽電池電壓由低電壓漸漸升高,當高於蓄電池電壓時,充放電控制 器即判斷為白天,開始進入充電模式,同時量測蓄電池的電壓與電流。若蓄電池電 壓升高到飽充電壓,此時控制器開啟金氧半場效電晶體(MOSFET)來降低充電電流,
如圖 2.2-2 所示,以保護蓄電池避免因過度充電造成損壞。而在本研究單軸追日性 能測試時,不希望蓄電池進入飽充階段,造成發電損失,因此,當充電電壓快升高 到飽充點時,同時加入負載放電的方式,避免蓄電池進入飽充階段。
(2) 晚上放電模式
日落時,太陽電池電壓漸漸下降,當低於蓄電池電壓時,控制器會判斷為夜晚,
開始進入 PWM 負載放電模式 [12]。若蓄電池在放電一段時間後,電壓降低到過 放點,為避免蓄電池過度放電而造成毀損,控制器會中斷放電以保護電池,直到次 日白天時,蓄電池才開始進行充電。
圖 2.2-2 太陽光電系統充放電圖 [4]
圖 2.2-3 充放電控制器控制流程圖
由於太陽電池的輸出功率受操作電壓影響,因此本研究採用 nMPPO 系統設計 方法 [13, 14, 15],不採用傳統的最大功率追蹤控制器(MPPT)進行最大功率發電。
nMPPO 需要匹配太陽電池與蓄電池的電壓,因此需慎選太陽電池,使其最大功率 點剛好落在蓄電池的操作電壓範圍(23.6~28.8V),如圖 2.2-4 所示。由圖可觀察出 蓄電池操作範圍最好保持在最大功率點的左側,避免發電功率下降。
圖 2.2-4 230Wp太陽電池特性曲線 [16]
2.2.2 控制器硬體設計
本研究單軸追日太陽光電系統控制器(1A-MPG)選用 Microchip 公司生產的 PIC18F26K22 微處理器,其功能強大並具有整合諸多功能於一身的特性。不但節 省開發時間,在降低體積與成本上也有相當大的助益,適合作為控制器之核心組 件,未來如需要擴充額外功能也極為方便。圖 2.2-5 為單軸追日控制器實體圖,此 控制器具有以下特點:
(1) 低成本:一台控制器控制可三座單軸追日裝置。
(2) 符合用電需求:本研究兩套系統皆裝設三座單軸追日發電量約 1.5 kWp,滿足 一般家庭之用電量。
(3) 功能:在控制器上可直接量測 PV 電流訊號以進行最大發電控制。
圖 2.2-5 1A-MPG控制器實體圖
為了避免控制器受到外在氣候條件影響,將單軸控制器放置於耐候高、防水性 佳的塑膠盒中,可以大幅減低陽光曝曬或風雨吹襲的機會。另外,本研究在 1A- MPG 控制器外殼的貫穿接頭上加入 O 形環,防止空氣中的水氣或下雨時雨水滲透 至電路板,進而影響控制器,如圖 2.2-6 所示。
圖 2.2-6 1A-MPG控制器放至於防水盒並在接頭處加入O形環
圖 2.2-7 為 1A-MPG 單軸追日控制器的完整電路設計圖,將針對三大重點部 分進行更詳細地說明:(1)推桿定位、(2)時鐘計時、(3)PV 電流訊號量測。
O 形環
圖 2.2-7
1. 推桿電流回授與定位控制 2. 時鐘 IC 計時 3. PV 電流訊號量測
(1)推桿定位
利用推桿具有可變電阻定位器之功能,在不同的推桿長度下,可變電阻值會隨 之改變,並利用分壓定理得出其電壓來當作輸出訊號,如圖 2.2-8 所示。再將所得 到之輸出訊號值對應至推桿長度,即可利用幾何關係計算出不同推桿長度所對應 之停駐角度。因此,本研究最主要是利用推桿伸縮,以轉動太陽能板的角度,並可 藉由其回傳之電壓訊號推算出當下太陽能板的停駐角度,並加以進行控制。
圖 2.2-8 推桿內部控制電路示意圖與對應之推桿長度
另一方面,若追日的過程發生異常情況,如:與建築物發生碰撞、強風吹襲、
外部電源故障使推桿電流過大,可能會造成推桿的毀損。因此,特別針對推桿異常 狀況做了下列三重的保護工作:
第一層防護 單晶片的回授控制電路:
在追日裝置切換停駐姿態的過程中,同時利用回授電路來量測推桿的工作電 流,如圖 2.2-7 編號 1 電路圖所示,進行主動的防護措施,若電流過大,立即關閉 電路停止動作。
第二層防護 追日裝置的保險絲設計:
在控制器上加裝了保險絲(耐電流的安培數略小於推桿的最大電流上限)的被
第三層防護 推桿自我的過載保護:
當上述兩道防護關卡皆失效後,才使用推桿本身的過載斷電保護。
上述三重保護措施,係為避免在異常突發的狀況下,造成推桿的毀損。
(2)時鐘計時
本研究追日裝置其動作主要是以時間為基準,當時間到達設定時間點,驅動推 桿伸縮使太陽電池進行轉動,因此需要較精準的時間。若使用微處理器的內建計時 器計時,長期使用下會產生相當大的累積誤差,因此選用時鐘 IC 作為計時元件(型 號:MCP79410)。且當控制器電源發生異常停止供電時,可自動偵測並切換至備用 的電源(如:水銀電池)來繼續供電,使時鐘 IC 在控制器斷電下也能正常運行,如 圖 2.2-9 所示,增加使用上的便利性。[17]
圖 2.2-9 MCP79410備用電源示意圖 [17]
(3) PV 電流訊號量測
1A-MPG 的追蹤方法是利用太陽板作為感測器,量測太陽板電流作為判定最 大功率的停駐角度,因此量測電流訊號是系統相當重要的ㄧ環。如圖 2.2-7 編號 3
為量測電流之電路圖,本研究選用 ACS712 做為電流量測 IC,精準度可達 0.01 安 培。
為了將電流訊號傳輸至控制器作為判斷依據,將其製作成一組件,考量到環境 及氣候因素,將電流量測 IC 組件放置於防水盒,具密封圈之接頭,防止下雨時雨 水滲透至電路板造成損毀,增加可靠度,如圖 2.2-10 所示。
圖 2.2-10 電流量測組件(包含防水接頭)
2.2.3 控制器軟體設計
圖 2.2-11 為單軸追日太陽光電系統最佳發電控制(1A-MPG)流程圖。開始時可 選擇是否要進入設定模式。進入主程式後,則會讀取時鐘 IC 並判斷是否到達追蹤 時間,若到達追蹤時間,則開始執行追蹤策略。在追蹤的同時也會檢查推桿電流是 否過大,以免推桿燒壞,以此不斷循環達到單軸追日控制的方式。
圖 2.2-11 單軸追日太陽光電系統最佳發電控制流程圖
為了讓使用者方便以及直覺化設定控制器,並可依據不同安裝環境設定控制 器。在控制器上設有三個按鈕以及一個 LCD 顯示面板:左上按鈕為確定鍵,右上 按鈕為選擇鍵,右下按鈕為重啟(初始)鍵。控制器剛啟動時,顯示面板上會跑出如 圖 2.2-12 所示,直到’-’符號結束前,若按下確定鍵,就會進入設定模式;反之,
若在開機時未按下確定鍵,則會進入主控制程式。開機完成後若需重新進入設定模 式,則必須按重啟鍵,使控制器重新啟動,在按下確定鍵進入。
圖 2.2-12 單軸控制器面板控制
單軸控制器的設定模式主要有二大功能:
(1) 設定單軸最大發電量追蹤東西角度極限:
控制器出廠時,將追蹤東、西角度極限分別設定為推桿的最小伸長量和最大伸 長量,但因不同架設環境的考量,單軸追日裝置有碰撞建築物或障礙物的可能,為 了避免此情況發生,可分別設定三座 1A-MPG 的東、西極限轉動角度。若無設定 則預設為東 45 度與西 45 度。
(2) 設定時間:
由於時鐘 IC 使用 5V 水銀電池作為備用電源,不會造成斷電,因此設定時間
確定鍵 選擇鍵
重啟鍵
前幾代 1A-MPG 在長期運轉測試中,不定時會出現異常情況。其時常發生在 搜索最佳角度時必須判斷推桿位置是否轉動至最東/西傾角,而回傳的推桿定位值 因環境干擾造成不定時會有飄移的情況,使控制器無法正確地判斷當下推桿的位 置。為了防止上述情況發生,本研究加入兩項保護措施:
(1) 電壓準位定時更新:
每一段時間就會自動重新設定電壓準位,以減少推桿值的漂移情況。
(2) 增加計時的功能:
控制器在判斷是否轉動至最東/西傾角時,若是停留時間過久,則自動跳出程 式(Bypass),確保系統可持續運行,提高系統穩定性。
單軸追日裝置不論是採用何種追蹤法皆使用相同的硬體電路設計。其最佳停 駐角是利用搜索過程所獲資訊,微處理器依不同控制方法計算,再由微處理器送出 控制指令完成最佳停駐角控制。因此本系統僅需透過修改軟體設計,即可達到不同 種追蹤控制方法。
另外,為了紀錄此系統的每日發電量,將每秒量測到的電池電壓、電流、推桿 角度,透過 RS485 傳輸至電腦,如圖 2.2-1 所示。利用 Visual Basic 軟體撰寫系統 顯示介面,便可更新顯示即時發電量等其他資訊,以便隨時監控系統狀態。如圖 2.2-13 所示,推桿角度顯示正為東邊,負為西邊。
圖 2.2-13 1A-MPG系統監測畫面
2.3 單軸追日最大功率發電控制系統(1A-MPG)整合
單軸追日最大功率發電控制系統為整合 2.1、2.2 節的機構及硬體設計,分別在 兩種不同環境下裝設太陽光電系統進行實地測試:(1)大樓頂樓、(2)住家平房。每 一套系統共有三座追日裝置,每一座追日裝置的實體架設情形如圖 2.3-1 所示。本 研究將架設在大樓頂樓之系統稱為第一系統;架設在住家平房之系統稱為第二系 統。而兩套系統的機電設備詳細規格如表 2.3-1。
圖 2.3-1 1A-MPG追日系統實體架構 太陽能板
太 陽 能 板 固 定 框架(H-frame)
單支撐架(T-Bar)
蓄電池與單軸、
充放電控制箱 推桿
負 載 (燈具)
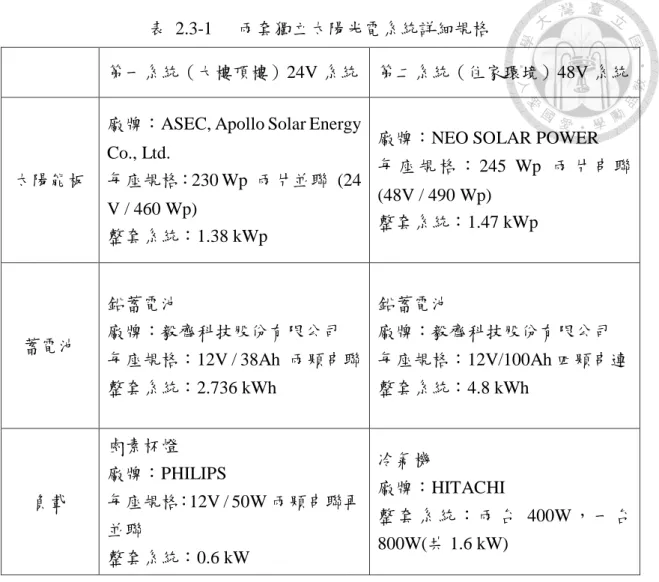
表 2.3-1 兩套獨立太陽光電系統詳細規格
第一系統(大樓頂樓)24V 系統 第二系統(住家環境)48V 系統
太陽能板
廠牌:ASEC, Apollo Solar Energy Co., Ltd.
每座規格:230 Wp 兩片並聯 (24 V / 460 Wp)
整套系統:1.38 kWp
廠牌:NEO SOLAR POWER 每 座 規 格 : 245 Wp 兩 片 串 聯 (48V / 490 Wp)
整套系統:1.47 kWp
蓄電池
鉛蓄電池
廠牌:毅齊科技股份有限公司 每座規格:12V / 38Ah 兩顆串聯 整套系統:2.736 kWh
鉛蓄電池
廠牌:毅齊科技股份有限公司 每座規格:12V/100Ah 四顆串連 整套系統:4.8 kWh
負載
鹵素杯燈 廠牌:PHILIPS
每座規格:12V / 50W 兩顆串聯再 並聯
整套系統:0.6 kW
冷氣機
廠牌:HITACHI
整 套 系 統 : 兩 台 400W , 一 台 800W(共 1.6 kW)
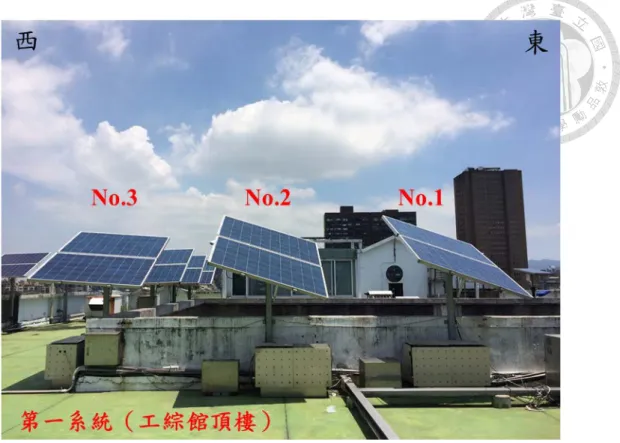
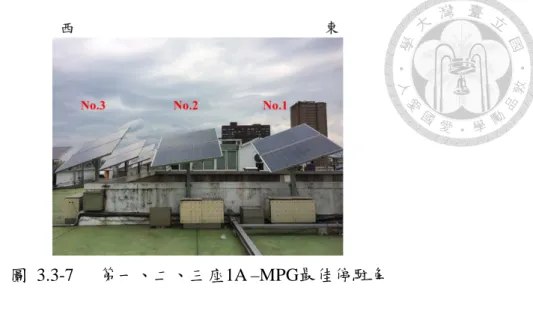
第一系統設於國立臺灣大學工學院綜合大樓頂樓,進行長期戶外的實測。依據 裝置設置方位而定,由東至西依序命名為 No.1、No.2、No.3,如圖 2.3-2 所示。第 一系統架設於頂樓較不亦受都市高樓影響,讓承載在上面的太陽板可以吸收較多 的太陽輻射,增加發電量。
第二系統架設於溫州街住家平房,單軸追日機構在本實驗環境同樣安裝三座,
如圖 2.3-3 所示。因住家環境較為複雜,No.1 裝在住家之後陽台,遮陰較少,No.2 與 No.3 兩座是相鄰安裝在馬路旁的女兒牆上,與頂樓安裝有很大不同,易受大樓 反射、樹木遮陰、兩座互相遮陰干擾,因此相當適合測試與研究此系統的可靠度,
以及在不同裝設環境下對系統發電量之影響。
圖 2.3-2 1A-MPG系統架設於大樓頂樓(第一系統)
單軸追日智能化搜索對發電量之影響研究
3.1 單軸追日發電量最佳化控制原理
單軸追日發電量最佳化控制原理為利用2.1節所介紹的單軸追日的機構平台,
增加量測搭載在上面太陽電池的發電狀況,進行停駐角度的調整控制,使其獲得最 大發電量,稱之為單軸追日最大功率發電控制。
單軸追日最大功率發電控制方法應用於自用型的太陽光電系統(含蓄電池),採 近最大功率點操作設計 [14],有別於傳統最大功率追蹤控制器需額外加裝控制器,
增加系統成本。nMPPO將太陽電池與蓄電池特性進行匹配,其操作電壓通常設定 在蓄電池的高低電壓,以保護蓄電池不會過放或飽充,如2.2.1節所述。
單軸追日裝置為可轉動的平台,透過轉動太陽板來躲避或減小遮陰面積來降 低發電損失,藉以獲得最佳總發電量,而其靈活度遠高於 1A-3P 技術(僅固定的三 個停駐角)。此控制技術不管有無遮陰,都可以搜尋到一個使太陽電池產生最大發 電功率的停駐角度(天空視角),如圖 3.1-1 所示。
圖 3.1-1 單軸追日最佳發電控制概念
圖 3.1-2 太陽光抵達太陽電池表面的變化示意圖
太陽運行角度則隨早晚時間移動(東西向),隨季節緩慢改變(南北向),為了找 出單軸追日最佳發電控制方式,必須先了解太陽光在抵達太陽電池前所遇到的環 境干擾。
太陽光在進入大氣層前是直射光,一進入大氣層便受到大氣的吸收、漫射、繞 射,抵達地面時又受到地表上各種阻擋物的反射,如圖 3.1-2 所示。圖中實線箭頭 代表太陽光無受到任何干擾,虛線箭頭則代表太陽光受到大氣及各種阻擋物所影 響產生不同變化,現象非常複雜,變化性也相當地高。故在探討單軸追日最佳發電 控制時,必須先掌握「環境因素」以及「價值函數」,才得以擬定控制策略。
(1) 環境變因探討
本研究將影響入射至太陽電池表面太陽輻射的環境變因分成三大類,如圖 3.1-2 所示:
A 類(固定不變):建築、物體、山、地形
B 類(定型變化):太陽運行角度、季節變化、相鄰 1A-MPG 機座的互相干擾 C 類(隨機變化):天氣變化(雲朵、水氣)、汙染物、飛行物
因此,在尋求最佳追蹤控制邏輯時,將優先處理 A 類與 B 類的環境變因,至 於 C 類變因發生時間快而不定,不易掌握,因此一動不如一靜,條件成熟時才進 行處理(例如強烈白雲堆反射出現時,也可能提升發電量,德國慕尼黑展覽中心的
(2) 價值函數探討
因每一座 1A-MPG 安裝環境都不同,因此無法以統一的控制系統來運作,故 本研究將採用智能化控制,設計一系列標準的轉動動作,對每一座 1A-MPG 定期 進行線上識別(on-line identification),以找出運作模型,求出最佳條件再加以控制停 駐角度。實務上,1A-MPG 可能並排安裝,如果受限於建築空間使相隔距離不足,
相鄰機座便可能產生互相干擾,如圖 3.1-3 所示,這也是遮陰的一種。
圖 3.1-3 相鄰1A-MPG機座產生互相干擾情形
根據本團隊成員鄭宏彥 [4]所推算出的價值函數,經過簡化並代入後,可將第 一系統及第二系統的價值函數分別寫成(3.1-1)及(3.1-2):
Pt = P1(θ1,θ2) + P2(θ1,θ2,θ3) + P3(θ2,θ3)
= VbatI1(θ1,θ2) + VbatI2(θ1,θ2,θ3) + VbatI3(θ2,θ3) (3.1-1)
Pt = P1(θ1) + P2(θ2,θ3) + P3(θ2,θ3)
= VbatI1(θ1) + VbatI2 (θ2,θ3) + VbatI3(θ2,θ3) (3.1-2)
上式中 θ1,θ2,θ3代表三個相鄰機座 1A-MPG 太陽能板的法角與地面法線的 夾角,如圖 3.1-4(A)、(B)、(C)分別定義太陽能板朝西邊為負角度、水平角度為零 度、朝東邊為正角度。P 包括相鄰 1A-MPG 與建物的干擾以及太陽角度影響,即 A 類與 B 類環境變因。
圖 3.1-4 角度定義
單軸追日最大功率發電追蹤控制的目的即在找尋各個機座最佳停駐角θ1,θ2, θ3,使 Pt為最高。數學上就是解下列聯立方程式:
𝜕𝜕𝑝𝑝𝑡𝑡
𝜕𝜕𝜃𝜃1 = 0 , 𝜕𝜕𝜃𝜃𝜕𝜕𝑝𝑝𝑡𝑡
2 = 0 , 𝜕𝜕𝜃𝜃𝜕𝜕𝑝𝑝𝑡𝑡
3= 0 (3.1-3)
綜合上述,單軸追日最大功率發電追蹤控制共發展出兩種控制方法:直接搜索 法(direct search method)、最大功率追蹤法(maximum-power tracking method) [4]。而 本研究將針對直接搜索法進行最佳發電研究,以下將針對直接搜索法進行更詳盡 地說明。
「直接搜索法」依據太陽軌跡而發展設計的,從上午八點開始,每隔一個小時 就會執行一次追蹤控制,直到下午四點結束,若時間在上午八點以前或下午五點以 後,則不需進行追蹤,單軸處於水平狀態。
早上及中午整點時間,三座都依序停駐在朝東50°傾角,由最東邊No.1開始進
束後經由控制器所記錄的電流值,找出最大電流所對應之停駐角度,再以控制器調 整至該角度,即完成No.1控制,接著No.2、No.3重複進行前述動作;下午時間都依 序停駐在朝西50°傾角,由最西邊no.3開始動作,轉至最東邊50°傾角,轉動過程中 如同上午及中午時間的控制方式,先針對No.3進行控制,接著No.2、No.1重複進行 一系列動作。如圖 3.1-5所示。
圖 3.1-5 直接搜索法控制流程圖
本研究採智能化搜索,為了減少產生不可預測之環境變因,所使用之直接搜索 法皆包含本團隊成員楊煌偉 [5]對C類環境變因作修正之控制方法。然而,其判斷 方法是利用鄰座靜止1A-MPG進行判斷是否產生C類環境變因,但因容易受到鄰座 轉動時所產生的遮陰互相干擾進而導致誤判,因此本研究將判斷基準點修正為較 遠的單軸裝置,以減少誤判情形,例如:在上午時段,No.1在搜索的過程中,同時 記錄No.3的電流值變化,若是No.3電流值變化過大,則判定此次搜索結果無效,則 以1A-3P作為停駐角度。
另一方面,針對「直接搜索法」耗能進行探討。搜索採每小時一次的方式,一 天共九次,每次皆由東50°至西50°(或西50°至東50°),完成一次轉動需時約20秒,
馬達耗電15 W,每座每次耗能300 J,因此每天九次共2.7 kJ (單一座);若是使用單 軸三角度(1A-3P)一日追蹤三次,每次耗能180 J,一日的總耗能為540 J。在台北,
460 Wp太陽電池如採用水平固定式安裝平均每天可發電約1.26 kWh,假設1A-MPG 與1A-3P皆可提高發電量約25%以上 [10],約315 Wh。台大陳冠宇證明單軸轉動耗 電量遠小於1A-MPG的發電提升量 [16],因此單軸提高的發電量1,134 kJ遠遠大於 馬達轉動所產生耗能2.7 kJ。
然而,單軸裝置在長時間的頻繁轉動下,磨耗率相當地高。為此本研究將致力 於在減少蒐索頻率的同時,又能維持系統發電量的最佳控制方法,以減少單軸裝置 的磨耗率以及其產生的耗能,如 3.2、3.3、3.4 節所述。
3.2 縮減搜索頻率對發電量之影響
雖然不論是 1A-3P 或是 1A-MPG 提高的發電量皆遠大於其耗能,但 1A-MPG 的耗能依然比 1A-3P 高出許多,且每日不斷進行搜索對單軸追日機構之磨耗日益 增加,提高損壞的可能性,為此本研究將探討減少搜索頻率但又不影響發電量的方 法。為了能夠達到此效果,採何種追縱控制較佳,視現場的環境而定,找出最佳的 平衡點是本研究的探討重點。
本研究將探討 1A-MPG 縮減搜索頻率對發電量之影響,針對直接搜索法採縮 減「搜索頻率」或「搜索範圍」兩種變因進行控制。此小節將針對縮減搜索頻率進 行探討,實地於第一系統進行測試分析。
原 始 直 接 搜 索 法 的 搜 索 時 間 採 取 每 小 時 搜 索 一 次 的 方 式 , 每 日 共 九 次 (8:00~16:00)。而本研究為縮減搜索頻率,將每日轉動搜索次數減少為五次(8:00、
10:00、12:00、14:00、16:00)或三次(8:00、11:00、14:00),探討減少搜索次數對發 電量之影響。
透過縮減搜索頻率之控制方 式,單軸轉動耗能可從原本的單一座每天九次 2.7 kJ 降低至每日五次 1.5 kJ 或每日三次 0.9 kJ。亦可減少單軸追日機構磨耗次數,對 設備的可靠度亦能有所提升。
圖 3.2-1 為十月到十二月之間在第一系統下針對直接搜索法縮減搜索頻率之 比較圖。圖中的斜直線是以最小平方法產生一條直線,此直線使得各點和線之間的 離差平方和為最小,並利用此一直線代表其發電效率。圖中顯示在此季節,低輻射 量時發電量無明顯之差異;較高輻射量下,隨著搜索次數的增加,系統發電效率略 為下降。造成此結果,推測為直接搜索法在搜索過程中容易受到干擾導致誤判,有 可能發生在上午時段太陽能板卻停駐在西傾角之情況,造成發電量損失。因此有時 過於頻繁地搜索太陽能板的停駐角度,反而會使產生誤判的情況較為嚴重。
圖 3.2-1 直接搜索法縮減搜索頻率對發電量之影響(第一系統)
3.3 縮減搜索範圍對發電量之影響
此小節將針對縮減搜索範圍進行探討,實地於第一、第二系統進行測試分析。
原始直接搜索法的搜索範圍為 100°(由東 50°至西 50°),搜索時間約為二十秒。本 研究為了降低搜索耗能以及長時間的搜索過程對於環境變因之干擾可能提升,將 搜索範圍減半,以減少搜索誤判機率,讓早上時間的停駐角度會在東邊,下午時間 的停駐角會在西邊,使搜索時間減半即十秒可完成。耗能部份,從原始直接搜索法 2.7 kJ 減低一半至 1.35 kJ。
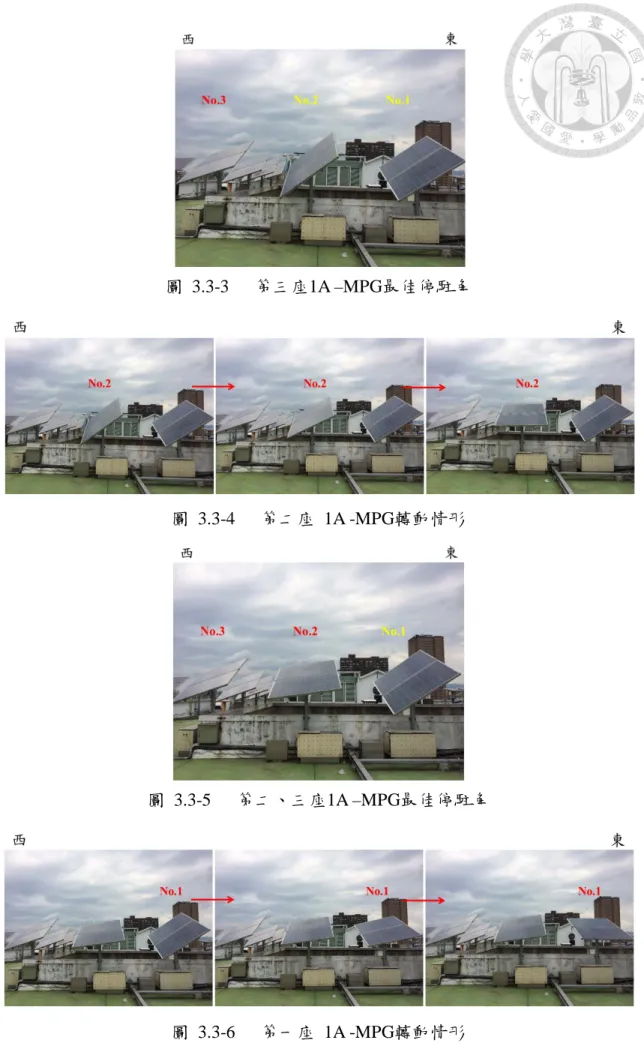
縮減搜索範圍之方法為上午時間由東 50°傾角轉至水平 0°角,中午時間由東 25°傾角轉至西 25°傾角,下午時間由西 50°傾角轉至水平 0°角。以下午時間的搜 索轉動作為例子,先讓三座 1A-MPG 都先停駐在朝西 50°傾角,如圖 3.3-1 所示,
然後先從最西的一座 1A-MPG(No.3)開始,將其由最西傾角(-50°),緩慢轉動至水 平角度(0°),如圖 3.3-2 所示。最後進行最佳角度搜索控制,如圖 3.3-3 所示。接 著重複進行 No.2,如圖 3.3-4、圖 3.3-5 所示,再進行 No.1,如圖 3.3-6、圖 3.3-7 所示。
圖 3.3-1 三座1A-MPG朝東50°傾角(下午時間)
圖 3.3-2 第三座 1A -MPG轉動情形
圖 3.3-3 第三座1A –MPG最佳停駐角
圖 3.3-4 第二座 1A -MPG轉動情形
圖 3.3-5 第二、三座1A –MPG最佳停駐角
圖 3.3-7 第一、二、三座1A –MPG最佳停駐角
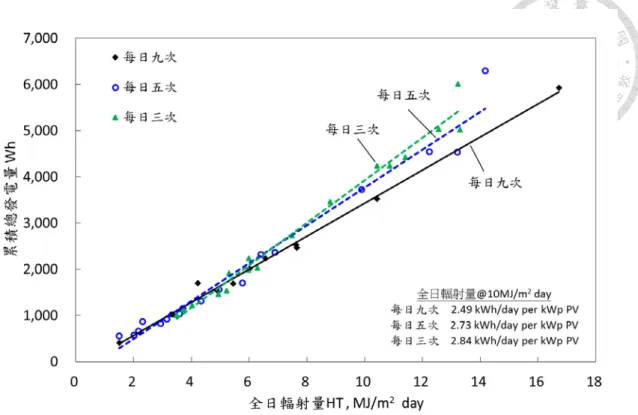
圖 3.3-8 為在第一系統分別採直接搜索法與縮減搜索範圍之直接搜索法的測 試結果。從圖中可發現,在日照平均每日為 10MJ/m2 的總輻射量下,兩種方法的 發電量幾近相同,兩斜直漸進線也幾近重疊。從此結果可以了解縮減搜索範圍並不 會影響發電效率,並可減少長時間搜索受到 C 類環境變因干擾的可能性,降低誤 判的可能。
圖 3.3-8 直接搜索法縮減搜索範圍對發電量之影響(第一系統)
第二系統則在七月到十二月份以縮減搜索範圍之直接搜索法進行測試,七到 十月及十一到十二月份搜索方式略有不同,分別為直接搜索法與縮減搜索範圍之 直接搜索法。圖 3.3-9 測試結果顯示在日照平均每天為 8 MJ/m2 的總輻射下,利用 縮減搜索範圍之直接搜索法(十一到十二月份)可得到 2.96 kWh/day PV,而原始直 接搜索法(七月到十二月份)可得到 2.43 kWh/day PV,大約提升 21%的發電量。因 住家環境較為複雜,容易受到環境變因所干擾。若採用縮減搜索範圍之直接搜索法,
可以明顯減少環境變因所產生之誤判情形,對發電量有顯著之提升。因此,在複雜 環境下建議採用縮減搜索範圍之直接搜索法可有效降低誤判率。
圖 3.3-9 直接搜索法縮減搜索範圍對發電量之影響(第二系統)
3.4 縮減搜索頻率與搜索範圍對發電量之影響
將前述 3.2、3.3 節的方法合併使用,同時採用縮減搜索頻率與搜索範圍之直接 搜索法,使耗能部份更為減少,從原始直接搜索法 2.7 kJ 減為 1.35 kJ,若將每日 縮減搜索頻率,則每日五次 1.5 kJ 減為 0.75 kJ,或每日三次 0.9 kJ 減為 0.45 kJ。
圖 3.4-1 為冬季時在第一系統採縮減搜索頻率與搜索範圍之控制方法,並與同 季節 1A-3P 的發電量進行比較。從圖中可知,在平均全日為 10MJ/m2 的總輻射量 下,1A-MPG 不論每日搜索幾次皆比 1A-3P 的發電效率高出 33%以上的發電量。
造成此結果是因在此一季節太陽的仰角最低,所產生的遮陰現象最為嚴重,1A-3P 無法應付此情況。相對 1A-MPG 來說,隨著搜索次數的增加,系統發電效率略為 上升,但整體而言,不論每日搜索幾次,其效率差異並不大,因此 1A-MPG 在此 季節若皆採用搜索範圍,改變每日搜索次數並不會對系統發電量造成很大的影響。
圖 3.4-1 直接搜索法縮減搜索頻率及搜索範圍對發電量之影響(第一系統)
圖 3.4-2 則是在住家環境下測試縮減搜索頻率與搜索範圍對發電量之影響,每 日搜索九次與每日搜索五次(皆有縮減搜索範圍)測試期間分別為十一、十二月份及 一、二月份。測試結果顯示,在平均全日輻射量為 8MJ/m2 時,利用每日搜索五次
與縮減搜索範圍之直接搜索法(一、二月份)可得到 2.69kWh/day PV,而縮減搜索範 圍之直接搜索法(十一、十二月份)可得到 2.96kWh/day PV,大約降低 10%的發電 量。
造成此現象之原因在於高輻射量時,若停駐角度沒有隨太陽運行角度即時變 化,就會使系統發電量產生較大的損失。從圖 3.4-2 中可以看出在全日總輻射量在 10 MJ/m2 可作為一個分界,在小於 10MJ/m2 的情形繪製於圖 3.4-3,顯示出兩者 的發電效率差異不大;大於 10 MJ/m2 的情況下,每日搜索九、五次之直接搜索法 皆有損失。因此,在輻射量不高的季節裡,每日搜索九、五次之直接搜索法皆足夠 應付住家用電所需。
圖 3.4-2 直接搜索法縮減搜索頻率與搜索範圍對發電量之影響(第二系統)
圖 3.4-3 第二系統直接搜索法縮減搜索頻率與搜索範圍對發電量之影響(輻射量 小於10MJ/m2 day)
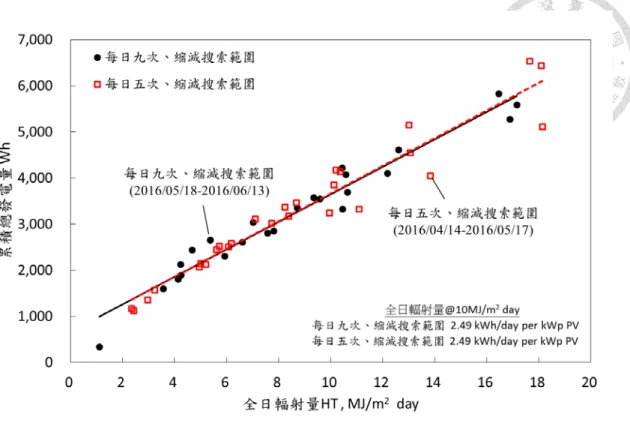
圖 3.4-4 則是四到六月份在第二系統下進行測試,當控制方法皆使用縮減搜 索範圍時,探討縮減搜索頻率對於發電效率之影響,每天耗能從原本的 1.35 kJ 降 低至 0.75 kJ。四到五月中及五月中到六月份分別測試每日搜索五次與每日搜索九 次之直接搜索法,從圖中可得知,在平均全日輻射量為 10MJ/m2 時,利用每日搜 索五次與每日搜索九次,皆使用縮減搜索範圍之直接搜索法得到相同發電量為 2.49kWh/day PV,兩條線趨勢線重疊。結果顯示在此季節,低輻射量時的發電效率 無明顯之差異。
圖 3.4-4 直接搜索法縮減搜索頻率與搜索範圍對發電量之影響(第二系統)
由前述種種的測試結果可知,在全日總輻射量較低的情況下,縮減搜索頻率對 於發電效率影響不大。但是採縮減搜索範圍之方法可以明顯減少隨機環境變因所 產生之誤判情形,並可提升發電效率。
另一方面,可靠度測試部分,在長期運轉測試中,藉由軟硬體的改良如 2.2.2、
2.2.3 節所述,目前在第一、二系統已測試十個月(從 2015/10 至今)皆可正常運行,
大幅提高系統的穩定性。
最佳太陽板姿態智能化學習與控制
4.1 最佳太陽板姿態智能化學習與控制設計概念
在相同季節裡類似的天氣型態總是不斷地重覆出現,再加上每天的太陽軌跡 及行走時間變化不大(B 類環境變因),因此各時段之最佳太陽板姿態每日變化不大。
本研究利用前述之概念,發展最佳發電太陽板姿態智能化學習與控制技術,讓此技 術可因應不同裝設環境,且可適用於裝設在各種不同地區。此方法主要是透過前段 時間的搜索並將結果記錄之,再透過一套演算方法預測未來可能之停駐角度加以 進行控制,讓控制器智能化學習與控制。因此,此方法不需每天搜索,可減少單軸 裝置的磨耗,並降低搜索頻率、耗能。
原始直接搜索法每天每隔一小時就會自動搜索找出最佳太陽板姿態,而本研 究採智能化學習法,可大幅減少搜索動作,使控制器不必每天進行搜索也能找到最 佳太陽板姿態。
此技術的控制方法為第一星期每天皆需搜索,如圖 4.1-1 所示。從第二週開始,
只需搜索前三天,後四天是利用前幾天(D1-D10)的搜索結果進行推斷。而前幾天各 座太陽板在各時段所得到的搜索結果則是透過微處理器的內部記憶體(EEPROM) 記錄之,不需額外傳值至電腦進行溝通與記錄,降低傳值過程信號受干擾之可能。
推算方法為將所蒐集到十天的各座各時段的停駐角度,先在同時段中找出最大及 最小值,並將兩者去除後求平均(trimmed mean),作為不搜索天(後四天)的停駐角 度。以此類推,第三週先去除第一週的前三天記錄之停駐角,再搜索三天並記錄之,
後四天的停駐角同樣利用控制器所記錄十天(D4-D13)之停駐角做推算。相當於除 了第一週外,每星期僅需追日三天。
圖 4.1-1 太陽板姿態智能化學習與控制方法
從圖 4.1-1 可看出第四週不需搜索天是透過整個月份(D7-D16)的搜索結果平 均而得,經長期蒐索智能化學習法將各時段太陽板最佳姿態收斂到最佳解。除此之 外,此控制方法在搜索過程中加入濾波以及縮減搜索範圍之直接搜索法,將諸多環 境變因影響降至最低,使得各時段所得到的最佳停駐角更為精確,藉此減少不需搜 索天對發電量之影響。
本研究利用智能化學習法推斷最佳停駐角,相對於最大功率搜索法(線性迴歸 法)減少了許多計算,降低系統複雜度。搜索耗能部份,平均每天將會從 2.7 kJ 降 低至 1.16 kJ。
4.2 最佳太陽板姿態智能化學習與控制測試分析
為了探討最佳太陽板姿態智能化學習與控制對發電效益之影響,在第一系統 進行實地測試並記錄每日發電量與各時段之停駐角度,以便後續進行更詳盡分析。
2016/03/31-2016/06/15 期間在第一系統進行最佳太陽板姿態智能化學習與控 制,其測試結果如圖 4.2-1。由圖中可發現透過智能化學習與控制,在日照平均每 日為 10MJ/m2 的總輻射量下,不需搜索天與需搜索天所得到之發電量相當相近,
且兩條漸進線也幾近重疊。
由此結果可得知,原本認為降低搜索頻率可能會使發電量下降,但數據顯示透 過智能化學習與控制並搭配縮減搜索範圍,可有效降低誤判率。即使每星期只搜索 三天,仍然比原本的直接搜索法,更能夠找到最佳停駐角,進而平衡了沒有每天搜 索之缺陷。此控制方法不僅可維持系統的發電量,並降低隨機變化之環境變因對停 駐角度的干擾,以及減少轉動次數對單軸裝置的磨耗。
圖 4.2-1 最佳太陽板姿態智能化學習與控制對發電量之影響(第一系統)
表 4.2-1、表 4.2-2、表 4.2-3 分別是記錄 2016/03/31-2016/06/15 三座追日裝置 各時段搜索所找到之最佳停駐角度(需搜索天:表格底色為白色處)與不需搜索天的 停駐角度(表格底色為灰色處)的數據。透過角度的記錄可以清楚看出,在需搜索天 的相同時段下,所找到之停駐角度變化大。造成這樣的原因是由於直接搜索法沒有 後驗的功能,追蹤過程各自獨立,在搜索的過程中容易受到當下環境變化(C 類環 境變因)所干擾,因此造成每次搜索結果的差異性非常大。
然而,從表中顯示出在相同時段下每週不需搜索天的角度變化減小許多。其因 不需搜索天是透過需搜索天進行學習,目的是透過長期蒐索資料來推斷未來的停 駐角,因此利用此控制方法可大幅降低受到 C 類環境變因的干擾,並找到更恰當 之停駐角度。
為了進一步瞭解經智能化學習之最佳停駐角計算結果,將不需搜索天在 2016/03/31-2016/06/15 三座單軸每週各時段角度做平均並繪製於圖 4.2-2。最佳停 駐角度大致上隨著太陽運行角度變化,以圖 4.2-2 來輔助說明各時段若採用 1A-3P 之控制方法,所造成各座相互間的遮陰影響。
在上午時段,No.1 單軸因受右側建築物遮蔽影響,導致停駐角度變小,同時 減少對 No.2 的遮蔭干擾,如圖 4.2-3(左)所示;中午時段,No.1 亦會受到右側建築 物遮陰影響,角度相較於其他兩座相對較小,如圖 4.2-3(中)所示;下午時段則變 成 No.3 受到另一側建築物影響,導致角度相對較小,如圖 4.2-3(右)所示。由此結 果可知,利用最佳太陽板姿態智能化學習與控制可以找出受到 A、B 類變因之各時 段的最佳停駐角,使最佳停駐角不受 C 類環境變因所干擾。
圖 4.2-2 2016/03/31-2016/06/15三座單軸裝置不轉動搜索天的停駐角度平均值
圖 4.2-3 1A-3P一天當中的遮陰情形 [4]
表 4.2-1 2016/03/31-2016/06/15第一系統No.1太陽板停駐角度
No.1 3/31 4/3 4/4 4/5 4/6 4/7 4/8 4/9 4/10 4/12 4/13- 16
4/18 4/19 4/20 4/21- 24
4/25 4/27 4/28 4/29- 5/2
5/5 5/6 5/7 08:00 43.0 24.4 6.7 24.2 24.4 41.6 23.8 2.7 24.4 3.9 21.7 11.6 41.2 40.4 24.2 0.1 10.8 24.0 17.8 24.1 0.5 0.4 09:00 43.2 24.1 18.8 40.5 41.1 40.4 14.0 13.5 24.5 24.6 28.5 6.8 40.8 40.9 29.9 24.5 4.9 34.5 23.0 2.9 39.4 0.7 10:00 34.3 18.5 3.8 24.1 41.8 41.1 12.9 25.1 25.4 26.7 26.0 3.3 24.0 34.9 26.8 24.4 17.8 14.2 21.4 22.1 18.5 24.7 11:00 -5.8 -2.7 1.0 1.0 1.5 22.5 4.7 24.4 16.3 0.2 5.6 7.3 4.1 15.2 9.1 0.9 20.0 17.7 10.8 12.0 21.4 10.5 12:00 25.1 -15.2 1.1 -6.4 6.8 -7.7 -7.9 -12.3 2.6 8.5 -1.9 5.5 0.9 1.0 -0.6 -2.7 3.8 -1.1 0.3 -10.0 3.0 -21.2 13:00 25.7 -13.7 1.8 0.2 1.1 0.9 -17.4 0.5 4.0 0.8 -0.5 -17.4 -13.9 -23.7 -5.2 2.3 0.9 -12.2 -7.0 0.9 -1.2 1.0 14:00 -43.3 -10.1 -3.0 -32.4 -32.1 -27.2 -23.8 -21.9 -21.2 -21.3 -23.7 -24.5 -24.8 -43.4 -25.9 -24.3 -24.8 -17.3 -23.3 -43.7 -42.7 -21.4 15:00 -47.1 -15.6 -17.4 -45.2 -24.9 -24.5 -20.1 -27.0 -7.3 -24.8 -24.9 -23.4 -24.2 -24.3 -24.1 -17.3 -22.2 -24.3 -22.6 -13.2 -24.8 -18.8 16:00 -41.8 -34.9 -16.3 -28.5 -12.5 -10.0 -17.6 -17.5 -39.9 -14.1 -22.7 -32.3 -24.3 -13.7 -20.0 -30.8 -17.9 -23.8 -22.2 -20.0 -24.4 -1.1
No.1 5/8-
5/11 5/12 5/13 5/14 5/15-
18 5/19 5/20 5/21 5/22-
25 5/26 5/27 5/28 5/29-
6/1 6/2 6/3 6/4 6/5-
6/8 6/9 6/10 6/11 6/12-
6/15 平均
值 08:00 14.5 34.9 41.6 0.7 17.1 24.4 39.0 21.0 21.1 41.5 0.5 24.5 23.3 13.8 19.9 0.5 18.0 41.0 17.7 12.9 18.9 20.5 09:00 22.4 41.5 0.4 40.7 23.6 24.2 0.4 16.6 20.0 0.5 0.7 40.7 15.6 29.0 14.0 24.2 18.8 41.4 4.6 9.3 17.4 22.5 10:00 21.6 24.5 24.5 13.1 21.4 16.2 24.4 6.4 19.7 35.1 36.3 33.3 24.5 36.4 24.2 24.2 25.9 37.7 3.0 14.2 26.3 23.4 11:00 11.0 1.0 1.1 17.3 11.9 23.2 15.8 1.0 12.1 0.9 24.1 13.4 10.5 9.9 15.8 1.0 12.2 18.7 -0.7 3.1 8.1 9.5 12:00 0.1 10.8 1.0 1.0 -0.5 24.4 8.5 4.6 2.3 -2.7 0.9 0.9 3.2 2.6 0.9 10.1 3.8 -4.9 1.1 -8.2 0.4 0.8 13:00 -5.1 -12.4 1.0 1.0 -2.6 -14.9 1.1 -20.3 -4.5 0.9 4.0 1.0 -2.6 10.4 -15.3 -21.4 -5.2 23.7 -10.5 11.5 -2.2 -3.1 14:00 -28.4 -29.4 -24.3 -32.4 -30.3 -45.2 -24.3 -24.8 -30.3 -24.3 -19.8 -24.3 -25.6 -11.7 -35.4 -24.4 -26.2 -4.9 -7.0 -15.5 -18.9 -25.2
表 4.2-2 2016/03/31-2016/06/15第一系統No.2太陽板停駐角度
No.2 3/31 4/3 4/4 4/5 4/6 4/7 4/8 4/9 4/10 4/12 4/13- 16
4/18 4/19 4/20 4/21- 24
4/25 4/27 4/28 4/29- 5/2
5/5 5/6 5/7 08:00 42.7 24.1 2.2 41.0 23.8 29.7 10.6 22.9 27.8 1.7 22.8 17.3 29.6 22.6 23.1 23.9 23.8 8.1 19.6 41.2 24.0 23.9 09:00 43.6 24.0 23.7 23.9 23.7 41.1 6.8 4.8 40.0 25.1 26.0 0.5 23.8 40.2 23.6 40.9 23.8 34.9 24.9 19.2 41.2 41.0 10:00 19.4 33.1 40.0 0.0 40.8 40.7 29.0 25.3 37.9 18.6 30.5 23.1 38.1 37.4 31.3 26.0 1.9 24.5 27.7 37.3 41.1 34.1 11:00 24.2 11.6 0.1 9.3 0.5 16.6 14.8 0.5 0.5 20.2 9.3 22.4 0.3 20.2 10.4 16.7 21.9 15.5 13.8 0.8 0.8 23.4 12:00 26.0 -3.7 23.9 0.7 7.3 -1.0 0.4 0.2 -14.5 0.3 3.5 17.0 0.0 12.5 2.6 0.7 -0.4 13.1 3.4 23.8 0.8 5.1 13:00 24.9 -15.2 19.2 0.5 0.4 0.7 -16.4 -12.6 13.5 11.1 2.2 9.6 0.0 -19.3 -0.8 17.3 0.7 0.7 0.9 0.1 0.8 0.7 14:00 -44.1 -7.2 -19.0 -44.1 -44.9 -13.7 -30.3 -30.2 -13.1 -22.0 -27.1 -25.2 -24.8 -17.7 -25.9 -24.8 -8.5 -24.7 -22.8 1.5 -17.1 -17.3 15:00 -46.0 -35.9 -24.0 -46.0 -25.1 -0.1 -5.5 -10.5 -7.8 -25.9 -22.6 -19.3 -24.9 1.2 -14.8 -9.6 -24.7 -1.8 -13.0 -5.1 -24.8 -6.0 16:00 -41.4 -15.9 -36.4 -36.3 -43.3 -6.2 -26.2 -15.8 -45.7 -23.8 -29.9 -4.9 -44.4 -34.0 -28.7 -6.7 0.5 -23.8 -22.5 -9.0 -24.5 -9.7
No.2 5/8-
5/11 5/12 5/13 5/14 5/15-
18 5/19 5/20 5/21 5/22-
25 5/26 5/27 5/28 5/29-
6/1 6/2 6/3 6/4 6/5-
6/8 6/9 6/10 6/11 6/12-
6/15 平均
值 08:00 21.7 20.9 38.7 24.0 25.3 7.6 39.0 12.1 23.9 36.8 23.8 41.0 27.5 19.2 32.8 41.0 28.6 34.0 19.2 15.3 27.8 24.8 09:00 31.2 23.8 41.1 30.3 34.5 2.9 4.5 15.9 26.3 41.0 41.0 23.8 27.7 21.4 2.9 40.9 22.6 40.9 23.9 9.6 27.3 26.3 10:00 29.9 23.9 24.0 21.4 28.6 17.9 38.0 11.4 27.7 26.6 35.3 32.1 26.9 41.0 23.8 29.9 28.2 40.3 9.0 26.4 28.3 28.1 11:00 14.9 23.8 23.8 0.7 15.5 19.4 22.5 0.8 13.4 23.2 23.6 0.8 17.2 23.6 0.4 17.7 13.6 17.4 16.7 20.2 15.1 13.4 12:00 6.2 17.3 6.1 7.5 7.9 22.7 0.7 18.4 11.4 12.5 4.2 4.0 9.5 13.5 -25.3 6.2 8.4 0.7 24.0 24.0 10.5 7.3 13:00 3.0 0.8 -10.3 -1.6 -1.0 -5.3 -0.5 0.8 -0.5 -14.2 0.7 0.4 -1.9 -23.8 0.5 -2.7 -2.8 22.9 22.7 3.6 1.5 0.7 14:00 -19.6 -21.5 -24.8 -24.7 -19.5 -15.5 -24.9 -9.7 -19.3 -24.9 -11.5 -24.9 -20.6 -21.1 -25.1 -24.7 -21.4 -1.9 -1.5 -24.9 -17.8 -21.0 15:00 -14.5 -24.9 -24.9 -24.9 -15.2 -24.8 -3.0 -20.3 -16.7 -3.5 -18.5 -33.2 -18.4 -19.6 -23.1 -24.8 -19.9 -15.9 -20.7 -14.7 -19.7 -18.4
表 4.2-3 2016/03/31-2016/06/15第一系統No.3太陽板停駐角度
No.3 3/31 4/3 4/4 4/5 4/6 4/7 4/8 4/9 4/10 4/12 4/13- 16
4/18 4/19 4/20 4/21- 24
4/25 4/27 4/28 4/29- 5/2
5/5 5/6 5/7 08:00 32.7 32.2 12.1 41.1 4.8 41.0 0.1 15.0 24.0 10.6 21.6 29.9 3.3 24.1 19.2 40.8 13.6 17.0 17.2 -0.1 7.5 8.3 09:00 31.5 24.8 26.9 41.4 41.5 41.1 14.8 15.9 34.4 13.8 28.9 0.2 1.0 24.0 23.3 41.4 19.2 15.6 17.4 20.0 0.0 33.0 10:00 39.6 27.1 24.2 24.2 34.4 37.9 30.5 25.1 29.9 8.4 29.2 7.4 24.9 28.3 25.7 24.2 24.1 21.8 23.4 21.6 24.1 23.3 11:00 26.3 17.2 17.7 0.4 0.7 9.7 23.8 1.6 20.4 0.5 11.4 20.3 1.0 0.9 6.9 0.7 24.2 14.7 10.5 0.5 0.9 19.5 12:00 25.6 -0.3 -8.2 14.1 0.9 0.5 8.4 21.5 -18.9 -8.5 3.6 17.7 0.7 -3.3 3.9 7.7 51.0 14.8 4.4 15.5 0.8 -9.0 13:00 25.9 -14.7 7.7 7.9 8.4 -16.0 -13.6 0.4 0.5 9.3 0.8 -8.6 0.3 -12.9 -2.1 13.1 13.0 0.9 0.4 3.8 0.8 -10.8 14:00 -40.1 -9.4 0.3 -24.7 -41.4 -12.4 -27.9 -4.1 -9.7 -10.0 -17.3 0.1 -24.8 -20.8 -16.8 -3.2 -25.0 -1.8 -12.4 -45.7 -24.8 -14.9 15:00 -18.9 -29.5 1.1 -24.9 -25.1 -8.9 -8.7 -23.0 -18.4 -11.7 -17.5 -11.4 -25.2 1.6 -16.4 -3.4 -24.0 -24.8 -15.6 -14.5 -31.0 -5.0 16:00 -42.5 -36.0 -46.3 -40.5 -46.0 -23.8 -14.8 -23.4 -30.9 -13.6 -32.2 -7.7 1.5 -42.1 -24.5 -14.2 -0.7 -10.8 -14.5 -4.3 -43.3 -13.3
No.3 5/8-
5/11 5/12 5/13 5/14 5/15-
18 5/19 5/20 5/21 5/22-
25 5/26 5/27 5/28 5/29-
6/1 6/2 6/3 6/4 6/5-
6/8 6/9 6/10 6/11 6/12-
6/15 平均
值 08:00 14.3 15.1 24.1 24.0 16.7 3.4 2.1 4.8 10.4 0.3 41.4 24.0 13.3 14.7 3.9 41.2 14.8 23.9 21.4 19.7 19.3 17.9 09:00 15.9 41.4 0.1 24.1 22.2 24.1 24.1 14.9 19.5 23.9 24.4 40.4 26.2 0.1 3.6 24.2 20.4 0.1 24.4 18.1 16.7 21.4 10:00 21.6 24.1 29.3 13.7 24.0 28.1 24.0 9.0 22.6 24.1 24.1 0.2 21.4 -0.1 8.1 22.1 15.7 24.1 13.8 24.5 15.7 22.1 11:00 7.4 -8.1 0.7 19.4 7.3 23.6 8.5 0.8 8.2 0.7 17.7 24.2 11.4 24.4 0.7 22.9 14.8 0.9 3.1 0.7 8.9 9.9 12:00 3.2 15.8 0.9 0.1 4.2 16.3 -0.7 18.7 7.9 -22.5 0.9 13.7 4.8 20.9 0.8 4.7 6.9 -2.2 1.0 15.8 6.7 6.1 13:00 1.1 0.9 0.8 -23.6 -0.4 -1.0 -4.5 1.0 -1.4 -9.2 16.4 21.9 -0.7 24.8 -4.4 -13.9 0.9 19.5 0.8 5.3 6.4 1.3 14:00 -15.6 -25.7 -36.0 -15.8 -20.7 -24.8 -18.2 -11.4 -21.4 -25.0 -6.7 -15.6 -18.9 -25.0 -35.7 -24.9 -20.0 -8.1 -25.0 -11.5 -18.3 -18.9
智能型太陽時鐘(solar clock)技術研究
本研究有別於需要加裝感測器的閉迴路控制方法,而採用時鐘 IC 定時搜索之 開迴路控制之方法,可有效降低系統在控制上的複雜度。然而,時鐘 IC 在長時間 使用下會產生累積誤差,以及特殊政經地區與太陽時間(solar time)有些許誤差等問 題,因此本研究將利用系統所搭載的太陽板作為太陽光感測器,發展智能型太陽時 鐘(solar clock)校正技術。目的為解決上述時間誤差之問題,進一步提高 1A-MPG 系統可靠度。
智能型太陽時鐘校正技術主要可區分成日出日落智能診斷與智能校正兩大部 分,如圖 5.0-1 所示。日出日落智能診斷是在觀察太陽與時鐘的關係,由光感測器 得到太陽運行的資訊,利用規則庫來推論每日的日出日落時間點,並將此記憶儲存 至資料庫。智能校正部分,將資料庫記錄之每日日出日落的資訊經由推論機制來判 別時鐘 IC(標準時間)與太陽時間之誤差。經由決策診斷誤差是否在容許範圍內,再 執行智能校正的動作。
圖 5.0-1 智能型太陽時鐘校正架構圖 日出日
落智能
智能校
5.1 日出日落智能診斷
5.1.1 太陽電池特性測試
先前台大丁偉倫 [9]、黃伊成 [10]利用熱電晶片(Thermoelectric Generating, TEG)及小型太陽電池(SC4112_AY, Vo.c 13V)作為感測器判斷日出日落信號。然而,
利用熱電晶片的方法會增加系統的複雜度與成本,且熱電晶片也有一定的壽命。在 複雜的戶外環境下,難以確保其使用壽命與太陽電池一樣長。另外,使用小型太陽 電池也有類似的問題,雖然電池的壽命相同,但需額外佈線加裝小型電池,且加裝 的位置有時也會被單軸承載的太陽電池所遮蔽,進而影響太陽時鐘的判斷。
因此,本研究為了改善上述方法之缺失,以不增加 1A-MPG 系統的成本為原 則,將單軸裝置本身承載之太陽電池(230Wp x 2)作為光感測器。此方法是利用 1A- MPG 本身具有量測各座電流訊號之功能,如 2.2.2 節所述。在 2016/04/29 進行全 天候的電流訊號量測,如圖 5.1-1,實驗結果可得知:日出時太陽電池的電流訊號 於會依據太陽光強度而上升;日落時也會因太陽強度減少而下降。太陽電池輸出電 流與太陽光強度成正比,雖無法像電壓訊號有明顯的驟升情形(如圖 5.1-2),但仍 可藉由此一特性判斷日出日落的時間點,進而推論出太陽午時。
採太陽電池電流訊號判斷之方法無需額外佈線量測訊號,僅需修改控制器軟 體,可降低系統成本、複雜度。另一考量,自用型太陽光電系統採用之太陽能充放 電控制器(isCon2 或 HyPV)會使太陽電池與蓄電池相連,如 2.2.1 節所述,因此無 法透過量測太陽電池的開回路電壓訊號進行日出日落判斷。
圖 5.1-1 太陽電池(460Wp)電流量測曲線
圖 5.1-2 小型太陽電池(SC4112_AY)電壓量測曲線 [10]
不同天氣型態對太陽電池電流曲線的影響
圖 5.1-3、圖 5.1-4 為兩片 230Wp 太陽電池在不同天氣情況下進行全天候電流 訊號量測結果。兩種所量測結果皆顯示日出時太陽板電流會漸漸攀升,日落時也會 隨太陽光強度慢慢下降。然而,太陽板電流容易受當下天氣所影響,白天時天氣若 是變化劇烈,也可能會量測不到電流,因此本研究透過微處理器的訊號處理分析、
判斷日出日落間隔是否合理之方法,進而找出大約的日出日落時間,彌補電流值無 法像電壓值具有驟升驟降以及容易受天氣影響之特性,詳細智能診斷方法將於後 續章節做說明。
圖 5.1-3 2016/03/10太陽電池電流量測曲線圖