DOI: 10.29417/JCSWC.201712_48(4).0003
無人載具產製之高精度數值地表模型應用於 樹冠孔隙自動判釋及邊坡土體穩定評估
黃韋凱
[1]*丁禕
[2]李璟芳
[1]摘 要 本研究目的旨在建立樹冠孔隙密度與邊坡土體穩定關係,以無人載具拍攝影像所產製之DSM,以 半自動判釋萃取出樹冠孔隙並分析其密集程度,瞭解邊坡潛在之不穩定區位。本研究以高雄市杉林區新庄里 境內之獅子山周緣坡地為案例,根據樹冠孔隙密度分析成果顯示,樹冠孔隙密度較低之區域,植生林相多為 平整一致或為平地地形;而樹冠孔隙較密集之區域,經比對現場狀況,發現林相多為倒塌紊亂,並存有張力 裂縫及崩崖,露頭量測位態也與區域位態差異甚大;另蝕溝流經之區域,該樹冠孔隙密度也相對較高。顯示 坡體經擾動後與樹冠孔隙密集程度呈負相關,該關聯性可初步提供重點調查及坡體破壞熱點之參考。
關鍵詞:UAV、DSM、樹冠孔隙、半自動判釋、邊坡土體穩定。
Application of a High-Resolution Digital Surface Model Produced by an Unmanned Aerial Vehicle in Canopy Gap
Interpretation and Slope Stability Assessment
Wei-Kai Huang[1]* I Ting[2] Ching-Fang Lee[1]
ABSTRACT This study establishes a relationship between the density of canopy gaps and slope stability by using a high-resolution digital surface model (DSM) made from images recorded by an unmanned aerial vehicle (UAV) to semiautomatically estimate canopy gap density. Estimated gap density can be employed to identify potentially unstable slopes. The forested slopes adjacent to Xinzhuang Village in southern Taiwan were used as a case study. The estimated canopy gap density is consistent with that of the field investigation. Where the canopy gap density or slope gradient is low, the slope surface is generally undisturbed. Where canopy gaps are dense, tension cracks and scars are often present, bedrock orientation is more erratic, and gullies are more densely spaced on the slope surface. At the Xinzhuang village, a strongly negative relationship was identified between canopy irregularities detected in the DSM and slope instability.
Canopy gap density detected with high-resolution DSM may therefore be a useful reference for preliminary slope haz- ard mapping.
Key Words: unmanned aerial vehicle, digital surface model, semiautomatic interpretation, canopy gap, slope stability.
一、前 言
臺灣位於菲律賓海板塊及歐亞大陸板塊之交界帶,處於板 塊運動劇烈之活動帶。故臺灣本島歷經劇烈之造山運動後,除 造成山坡地面積佔全臺四分之三以上外,加上成岩作用年代不 長使臺灣絕大多數坡體地質狀況屬脆弱且破碎,易於地震、豪 雨等事件後發生土砂災害,造成人命財產之損失,故對於災害 之防治有其必要性且刻不容緩。
空載光達 (airborne LiDAR) 以高精度、高解析度、高度自 動化且高效率之優勢,已成為世界各國進行廣域三維地形測製 主流與趨勢 (徐偉城,2007)。受惠於當前高精度之資料,根據 Soeters & van Westen(1996)、Chigira(2009) 及 Huang et al.(2015)
等人對於坡體易致災特徵之敘述,可解析不利於坡體穩定之地 形,如陡崖 (steeping of slopes)、裂縫構造特徵 (formation of cracks)、亂丘地形 (hummocky relief) 等,數化出坡體之微地 形,從中釐清各類微地形之關聯性與評估具危害性之坡體位置 (陳癸杏,2012;李璟芳等人,2015;陳奕中等人,2014;林慶 偉,2012)。惟光達掃瞄成本高,相較之下近年蓬勃發展之無人 載具因機動性佳、成本低廉,已廣泛運用於各類災害調查及防 災監測 (楊宗岳等,2009)。搭配近年技術純熟之航空攝影測量,
可將調查之空拍影像製成高精度數值地表模型 (DSM, Digital Surface Model) 以及正射影像圖 (申承翰,2012;黃美甄,2014;
內政部國土測繪中心,2014;黃志傑,2015)。因臺灣山區植生 茂密,故由無人載具拍攝建置之DSM 多半為涵蓋植生高度之
〔1〕財團法人中興工程顧問社防災科技研究中心
Disaster Prevention Technology Research Center, Sinotech Engineering Consultants, Inc., Taipei 114, Taiwan, R.O.C.
〔2〕 財團法人中興工程顧問社大地工程研究中心
Geotechnical Engineering Research Center, Sinotech Engineering Consultants, Inc., Taipei 114, Taiwan, R.O.C.
* Corresponding Author. E-mail: [email protected]
高程資料,尚無法如光達資料 (LiDAR) 顯現林木下之地形,
直接評估坡體之狀態。
據文獻蒐集與回顧,其較高之樹冠覆蓋率 (tree canopy cover) 可有效減少陡坡上滑坡災害之發生 (Swanson and Dry- ness, 1975, Swanston and Swanson, 1976; Swanson and Lien- kaemper, 1976; Wu and Swanston, 1979)。植生根系對邊坡穩定 效用源自於根系力學,藉植物根部生長延伸至潛在滑動破壞面 之下,增強土壤固結作用 (Wu et al., 1979)。Clutter 等人 (1983) 透過空間配置概念 (space distribution),以林木生長位置及樹 冠分佈模式 (crown distribute) 推測植生枯萎量與生長量。羅 時凡等 (2009) 以遙測技術探討溪頭地區柳杉人工林之森林 健康度,結果顯示以遙測技術監測植生狀況時,將樹冠層作為 分析重點時成效較佳。其中,樹冠分佈與樹冠孔隙兩者間特別 具有重要之關聯性,且此二者均為影響森林結構與植生變異的 重要因子 (Zhang, 2008)。兩相鄰林木間之坡面表土受到林木 根部拘限或束制 (constraint) 會形成土壤拱壁效應,可產生阻 抗力以穩固土壤拱壁後方土體;一般此拱阻抗力之大小與兩相 鄰樹幹之直徑成正比,而與兩相鄰林木間距成反比 (林信輝,
2001),而林木相鄰間距關係則可由樹冠之孔隙進行估計,間 接反映區域性之坡體穩定狀況。
本研究將利用無人載具拍攝影像所產製之DSM,從中獲 取林木樹冠孔隙資訊,建立坡體破壞引致植生根系斷裂、倒塌 及死亡等關聯性,續以探討邊坡不穩定之潛勢區位,供現場重 點查驗及坡體破壞熱點篩選之參考依據。
二、樹冠孔隙自動判釋及坡體穩定評估 方法
本研究除利用傳統之現場地表地質調查外,亦結合近年蓬 勃發展之無人載具航拍技術進行後端之評估應用,由地表數值 模型反映植生樹冠生長狀態說明與坡體間之相對穩定情形,其 研究方法茲說明如后。
1. 無人載具航拍及地表數值地形建置
遙測勘災技術,相對於使用傳統人力調查方法,具備了調 查範圍廣泛、空間解析度高、反應時間快、不受地形限制且沒 有生命安全威脅之優點,藉此更能掌握災害之精確資訊,以利 後端分析者掌握災害發生模式,作出適當預測與警告 (顏君毅、
張中白,2007)。隨著遙測技術發展與測量技術日新月異,1970 年代後期已有學者利用固定翼遙控飛機進行無人機攝影測量 實驗 (Przybilla and Wester-Ebbinghhaus, 1979),有別於傳統航 空攝影,該技術具有低成本、即時擷取地貌資料之優勢,無人 飛行載具 (Unmanned Aerial Vehicle, UAV) 已扮演重要且關 鍵之角色,且為防救災應變測繪製圖發展之重要工具。UAV 發 展技術日漸成熟,除藉由航拍獲取影像外,亦可由航拍之照片 資訊進行正射影像與三維數值模型之製作,產製出後續對於邊 坡穩定度之監測與分析圖資 (Leprince et al., 2008; Walter et al., 2009; Niethammer et al., 2009)。本研究採用 UAV 機型為旋翼 四軸無人載具,搭載GOPRO HERO3 魚眼鏡頭進行航拍,以
瑞士Pix4D 公司開發之 Pix4D Mapper 進行地表數值模型及正 射影像之產製,其分析流程如圖1 所示。上述軟體為一套可單 次自動化處理 10,000 張航拍影像及整合各張影像相機拍攝參 數,提供高精度影像拼接輸出之商用軟體 (Küng et al., 2011),
正射鑲嵌影像及DSM 產出之處理步驟說明如后。
圖1 無人載具航拍地表數值地形建置流程圖
Fig.1 The DSM process flowchart by unmanned aerial ve- hicle
(1) 航拍影像特徵點匹配:Pix4D Mapper 主要是利用多視角 立體視覺 (Multi-view Stereo, MVS) 演算法,利用拍攝影 像間相互之特徵點,求解相機參數和場景幾何型態,以 建置出地表三維模型。而特徵點搜尋、匹配原理,本軟 體基於 Lowe(2004) 提出之 SIFT 特徵匹配方法,並由 Strecha 等人 (Strecha et al., 2009) 進行優化。該法可針 對兩兩影像配對,匹配航拍影像間之單應性 (homogra- phies),透過隨機抽樣一致性算法 (random sample con- sensus) 進行影像特徵關聯性分析與圖像鑲嵌拼接 (mo- saic),其分析示意圖如圖 2 所示。
(2) 匹配點平差處理與地理參考系統校正:透過匹配點可提 供UAV 之相機拍攝位置和方向連結照相參數,進而利 用光束法平差 (bundle adjustment)(Triggs et al., 2000) 校 正匹配點,重建每張航拍影像精確位置後,再依UAV 採 用之GPS 測量值給予影像地理參考坐標,本研究所採用 之地理坐標參考系統為TWD97。
(3) 點雲加密及三角網格建置:利用處理步驟 1 之MVS演算 法建置三維模型,考慮可能會有特徵點匹配後,點雲數 量不足之情形,故本軟體採Furukawa 於 2007 年提出以 區塊為基礎之多視角立體映像 (Patch-based Multi-view
Stereopsis, PMVS) 方法,除擷取拍攝影像上更多之特徵 點與對應關係外,亦依影像紋理、色調向外擴張找到更 多對應點,達到點雲加密之效果,在提供更多之點雲資 訊狀況下,以增加三角網格處理數值模型建置時之空間 解析度 (Scharstein and Szeliski, 2002),示意圖如圖 3 所 示。
圖2 航拍影像特徵點匹配示意圖
Fig.2 The illustration of image feature point matching by aerial photo.
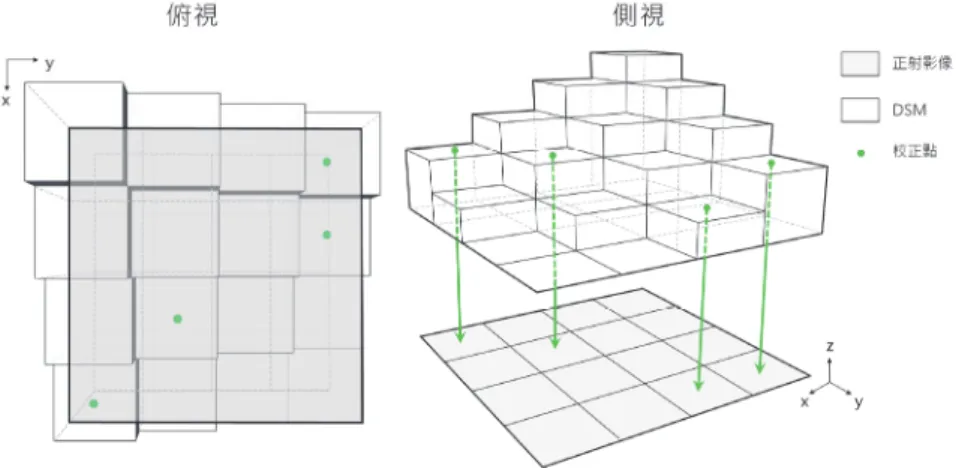
(4) 數值三維模型校正:三角網格建製而成之數值模型,除 依拼接後之正射影像地理坐標參考系統做校正外,亦根 據正射影像之像素位置做校正,以提升高程數值模型之 精確度 (圖 4)。
圖3 點雲加密及三角網格建置示意圖
Fig.3 The illustration of cloud point densing and trian- gular meshes production.
圖4 數值三維模型校正示意圖
Fig.4 The illustration of three dimension model calibration for DSM.
2. 影像物件導向分割及分類應用於樹冠孔隙判釋
樹冠孔隙 (canopy gap) 為評估森林生態系狀態常用之因 子,最早由Watt 於 1947 年所提出 (Watt, 1947);概念為樹木 經歷自然或人為干擾使之死亡而倒伏時,森林林木冠層間會形 成孔隙,其孔隙可以促成林木更新、生長,提高樹木存活率,
孔隙再次被填滿而消失,如此周圍林木亦有類似情況發生,造 成孔隙一再形成又一再鬱閉,周而復始、反覆循環,於森林中 造成一個個嵌塊體 (Shugart and West,1977)。植生多半生長於 高度風化之鬆散岩土上,對坡體穩定度而言邊坡土體自重或其 他外在誘因影響下 (如地震或降雨),多為誘發坡體變形及地 表位移之主因。以微地形 (micro-topography) 判釋觀點,若地 形上具崩崖、張力裂隙、遷急點 (knick point)、蝕溝或滑動體 等現生崩塌發展特徵,坡體有較高失穩滑動之可能性 (Ta- kasuke, 2000; Agliardi, 2001; Chigira, 2009)。本研究暫不考慮樹 種為影響樹冠孔隙之主因,僅以坡體地形變化與樹冠孔隙之關 係探討坡體穩定度,植生根系附著之土體狀況將反映其樹冠之 發展狀況;如植生生長於坡度30 至 50 度之狀況下,普遍比例
上樹冠孔隙密度較高 (Sakio and Tamura, 2008),如邊坡坡度由 緩轉急之遷急點位置,或是根系位於剪力區或交於張力裂縫,
植生根系較易受坡體破壞而斷裂死亡 (圖 5)。去除植被之三維 DEM 地形與 DSM 樹冠孔隙分佈及陰影圖之地貌關係,則如 圖6 所示。
圖5 樹冠孔隙與微地形關聯性示意圖
Fig.5 The cross-sectional illustration for tree canopy and micro-terrain feature.
本研究將以植生生長之樹冠孔隙與附著於坡體之根系狀 況作連結,採高精度地表數值高程模型 (DSM) 為基礎圖資,
由ArcGIS 軟體設定仰角 (altitude angle) 90 度下之日照陰影圖 做為樹冠孔隙研判之基礎圖資。惟考慮人工數化高精度樹冠孔 隙費時,故採用影像物件導向分析方法 (Object-oriented Anal- ysis, OOA) 針對樹冠孔隙進行自動判釋。該法始於 1976 年,
於近年逐漸取代像元式 (pixel-based) 分類 (Kok et al., 1999;
Benz et al., 2004;黃韋凱等人,2010)。該發展之轉變多半因現 今拍攝感測器技術之提升,產製高解析度之影像進行應用分析
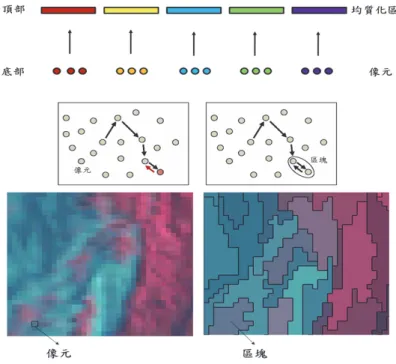
實為趨勢,採像元式分析時便可能使分析效率低下或有鹽與胡 椒效應 (salt and pepper effect) 產生雜訊影響結果 (Wong et al., 2003)。該方法乃利用影像中紋理之變化資訊進行均質化分割,
相似之紋理資訊區域遂轉化為同質區域 (圖 7),進而由此同質 區域進行影像分類,最小分類單元將為均質之影像物件 (im- age object)(Hay et al., 2005),此時將可釐清地貌分類界線不明 之現象、雜訊及同譜異質導致之誤判問題,亦可簡化高解析度 影像目標物萃取。
圖6 三維 DEM 地形與 DSM 樹冠孔隙分佈與陰影圖地貌關係圖
Fig.6 The feature relationship between the Three-Dimensional DEM and DSM canopy distribution and shaded relief.
圖7 像元合併均質化區塊其原理示意圖
Fig.7 The illustration of pixel merge to homogenization.
3. 核密度估計
本研究樹冠孔隙核密度分析流程之簡化示意圖與實際分 析示意圖如圖8 所示,於圖中 Step1.先以 DSM 陰影圖將其樹 冠進行揚顯,簡化圖為綠色圖層、而實際分析之陰影圖則為色 調偏白亮者;Step2.則針對樹冠間之孔隙進行攫取,簡化圖為 鵝黃色圖層、實際分析之陰影圖則為色調偏暗者;Step3.續以 針對分類出來之樹冠孔隙位置,計算該圖層彼此間之離散程度,
相對樹冠孔隙較密集區域會顯示為偏紅色、相對較離散則顯示
綠色。
上述計算樹冠孔隙於空間分佈之分析方法,為使用核密度 估計法 (Kernel Density Estimation, KDE)(Shi, 2010) 呈現樹冠 孔隙樣本之離散分佈狀況。該法之基本原理為:利用電腦計算 搜索之圓域移動分析範圍 (window size) 對點或線之密度進 行估算。其定義為:設xb…, xn從分佈密度函數為f 總體中抽 取之樣本,計算f 在某點 x 處之值,該方程式 (1)如下:
(1)
式 (1) 中 ( x- xi ) 表示估計點到樣本 xi 處之距離,n 代 表樣本數;其中之k ( ) 稱為核函數,本計畫於 ArcGIS 軟體分 析之核函數種類採Gaussian 核函數,其方程式 (2) 為:
(2) 其中,h 為 KDE 分析之搜索圓域半徑 (m),此核函數帶 寬 (h) 即為上述搜索之移動分析範圍,以移動之圓範圍統計 落於圓域內之樣本數量;進而分析每個樣本對於圓域內之密度 貢獻值,最後輸出每個圓域之密度值。值域設定需大於0,值 域設定越大則空間上之點密度邊界變化較光滑,且分析結果範 圍越廣,但將均化圓域內之密度結構;h 設定越小,分析之點 密度邊界變化則會依資料狀況發展,雖能呈現資料狀況,但將 較無法提供廣域性之分析 (王遠飛等人,2007)。
圖8 樹冠孔隙核密度分析流程圖
Fig.8 The flowchart of KDE on canopy gap analysis.
三、案例探討-以高雄市-杉林區獅子 山為例
本研究以高雄市新庄里境內之獅子山周緣坡地作為案例 分析場址,經濟部中央地質調查所 (2010-2012) 於大規模崩塌 地區分析報告指出,於本研究區域圈繪一潛在大規模崩塌地 (編號:高雄市-杉林區-D021),該區位有影響鄰近聚落之疑慮。
本研究區位整體坡度較高之區位分佈於近稜線側、坡趾處次之,
坡度由35 度至 70 度不等,平均坡度為 23 度;由光達地形進 行微地形判釋後,坡頂處可見陡崖發育之情形,對應其下方則 存有鬆散之堆積塊體地貌特徵,該地貌狀況與Soeters and van Westen (1996) 所提出之丘狀地形 (hummocky relief) 相似,反 映新庄潛在大規模崩塌地之地貌似有早期坡體潛移與堆積之
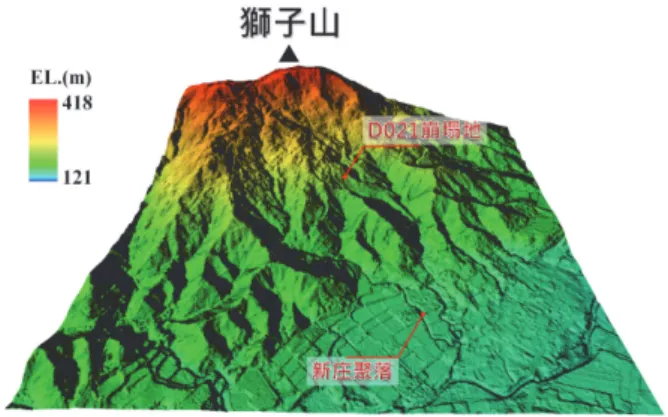
跡象,實有必要進行細部之調查評估工作;其研究區域之1 米 DEM(農委會水土保持局提供) 三維數值地形如圖 9 所示。
圖9 研究區域三維數值地形
Fig.9 The 3D terrain model of study area.
1. 研究區域航拍處理結果
航拍前為獲得好的取像條件,經考慮航拍飛行高度、時間、
距離以及航拍面積範圍之狀況後,共制定出6 條航帶,總拍攝 面積為460 公頃,本研究於 2015/6/5 執行 UAV 航拍。本研究 航拍飛行高度為200m,相片單幅尺寸為 X:553m,Y:311 m,單幅相片側向重疊達50%,航線距離最大範圍 276m;而 為獲取良好之坐標定位與量測,於測區空域通視區域設置地面 控制點 (Ground Control Point, GCP),以利空中三角測量平差 時之平面與高程比對。設置原則考量GCP 處於高空可通視範 圍及不可變動點,總計設置10 處。待控制點位坐標設置完畢,
以電子化全球衛星即時動態定位 (RTK) 系統 e-GPS 進行控制 點量測,平面坐標系統採用TWD97 坐標,高程坐標系統則採 用正高系統執行作業;其相關坐標資訊及空拍控制點經度檢核 表,分別如表1、2 所示。透過 2.1 節無人載具航拍之地表數 值地形建置流程與作法,製作空間解析度14 公分之 DSM,相 關成果圖資與航拍作業航線規劃及GCP 分佈則如圖 10 所示。
圖10 UAV 航線、控制點分佈與 DSM 成果示意圖
Fig.10 The DSM overlapping with UAV path and control points.
表1 研究區域控制點位坐標 (TWD97)
Table 1 The list of ground control point in study area (TWD97)
點號 縱坐標(N) 橫坐標(E)
GCP1 2543288.578 205571.026 GCP2 2543182.589 205504.707 GCP3 2543025.794 205468.421 GCP4 2543005.018 205242.497 GCP5 2543059.677 205810.840 GCP6 2542986.408 205653.558 GCP7 2542535.629 205614.126 GCP8 2542440.315 206090.457 GCP9 2542254.539 205794.545 GCP10 2542426.074 206378.722 單位:公尺
表2 空拍控制點精度檢核
Table 2 The list of image accuracy for the control points.
GCP Name Error X (m) Error Y (m) Error Z (m) GCP1 (3D) 0.039 0.103 -0.079 GCP2 (3D) 0.002 -0.043 -0.032 GCP3 (3D) 0.0375 0.036 0.136
GCP4 (3D) 0.157 0.194 0.346 GCP5 (3D) 0.022 -0.024 -0.059
GCP6 (3D) 0.102 0.0705 -0.084
GCP7 (3D) -0.045 -0.064 -0.106 GCP8 (3D) -0.107 -0.034 0.17
GCP9 (3D) 0.016 0.039 0.024 GCP10 (3D) 0.277 0.094 0.292 平均誤差 0.080 0.070 0.133 標準偏差 0.084 0.050 0.108
2. 物件導向樹冠孔隙自動判釋
此部分自動判釋所使用的分析軟體為德國公司 Definiens Image 所開發之 Definiens Developer 7.0(以下簡稱 Definiens),
是為一套專用於影像物件導向式分類之軟體。利用 Definiens 軟體配合上述之形狀異質性指標以平滑度 (smooth) 與緊密 度 (compactness) 之合量做為影像分割輸入參數,該數值設定 影響分割區塊邊界形狀,考量電腦計算效能本研究採軟體內定 值作設定。本研究物件導向分割對象將以ArcGIS 程式製作日 照仰角90 度下之陰影圖以做為樹冠孔隙研判之基礎圖資,分 割後共產生7,199 個分割塊體 (圖 11)。
影像分割塊體後,以陰影圖各分割塊體區位之亮度值 (brightness) 進而分類樹冠孔隙。關於樹冠孔隙之亮度值門檻,
本研究樣本選取方式採平均區域隨機抽選,選取共101 個樣本 作為樹冠孔隙亮度值域之訓練,樹冠孔隙分類之亮度值域分佈 狀況如圖12 所示,顯示其值域落於 36~141 之間.故以亮度值 141 以下作為樹冠孔隙分類。
根據分類成果 (圖 13),再隨機選取 101 個樣本作準確度 驗證,其101 個樣本所屬之自動判釋分類狀況,如表 3 所示,
樹冠孔隙分類準確度為65.3%,誤差則多於本研究區域坡趾及 平坦處之房屋邊界陰影,以坡度採大於25 度為門檻後,已可
濾除 8 成 5 以上之房屋陰影分類,提升樹冠孔隙分類準確度 至9 成。
圖11 研究區域物件導向區塊分割成果示意圖
Fig.11 The result of segmentation by object-oriented analysis in the study area.
圖12 樹冠孔隙分類亮度值域分佈圖
Fig. 12 The brightness value distribution of canopy gap classification
圖13 樹冠孔隙自動判釋成果圖
Fig.3 The auto-interpretation result of canopy gap clas- sification
3. 現場野外調查與樹冠孔隙核密度分析之關聯性 建立
由五萬分之一臺灣區域地質圖-美濃圖幅 (經濟部中央地 質調查所,2012) 及地質災害潛勢圖 (經濟部中央地質調查所,
2006),顯示本研究區域恰位於旗山斷層北段之內英逆斷層線
界,線界以南為經濟部中央地質調查所公告環境地質圖之岩屑 崩滑與土石流中潛勢區,而其斷層走向為北北東,斷面東傾,
性質為高角度的逆斷層,由高雄市那瑪夏區經杉林、甲仙、至 旗山區,長約40 公里,其上盤地層以砂岩與頁岩互層之長枝 坑層為主,下盤則以灰黑色粉砂質泥岩為主,或夾紋層至薄層 砂岩之隘寮腳層為主 (經濟部中央地質調查所,2006)。根據現 地調查結果,斷層界線以南之邊坡地層岩性以砂頁岩互層為主,
整體含砂量較高;斷層界線以北之邊坡地層岩性則以頁岩為主,
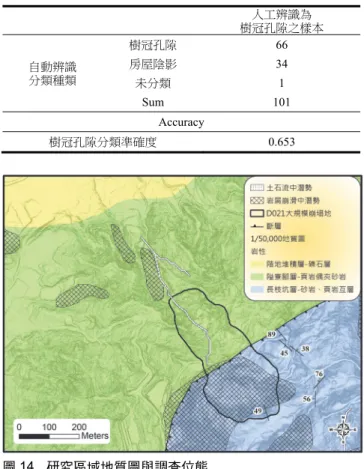
整體含泥量較高。稜線側未擾動層面位態為南北向、傾角向西 傾56°NW;N18°W/49°SW (圖 14),與非稜線側沿線調查之 露頭位態不一致,顯示本研究區域呈一斜交坡之坡體狀態,並 可能曾受區域性之擾動。
表3 分類成果之正確率
Table 3 The accuracy of sample classifications 人工辨識為 樹冠孔隙之樣本
自動辨識 分類種類
樹冠孔隙 66 房屋陰影 34 未分類 1
Sum 101 Accuracy
樹冠孔隙分類準確度 0.653
圖14 研究區域地質圖與調查位態
Fig.14 The geologic map and attitude of rock structural plane of the study area
而為連結樹冠孔隙核密度數值與現場之狀況,以及建立樹 冠孔隙核密度與邊坡穩定之關聯性,針對人為可及之沿線農路 與蝕溝兩側邊坡,每50 至 100 公尺取樣一點,總計 81 處,點 位分佈如圖15 所示。依現場不同之植生狀況與岩性,可將現 場調查結果區分為五類,其中林相調查主要針對於表土層以上 之植生狀態做調查;而地質岩性調查則針對表土層與基岩出露 位置,其調查點位依植生生長區域以及表土層、基岩區位調查 狀況如圖16 所示,現場調查準則簡述如下:
(1) 林相紊亂:此地貌類型屬較不利於邊坡穩定之地貌狀況,
林相於此些地貌狀態下多有倒塌、植生枯死等狀況 (圖 17 a),或存有曾受邊坡失穩影響,導致植生歪斜而時間
久後因植生有向陽性產生之馬刀樹狀況 (圖 17 b),亦或 是地表因滑移張裂產生之張力裂縫 (圖 17 c、d),影響 植生吸取養份之根系發展,導致林冠層樹葉枯萎使林木 間之樹冠孔隙間距加大。
(2) 林相平整:林木樹幹筆直、林葉冠層間茂密,此類包含 較生長於平緩地形之草本植生狀況,相對來講此地貌較 有利於邊坡穩定,植生根系發育良好有助於穩固坡體 (圖 17 e、f)。
圖15 樹冠孔隙核密度評估成果示意與現場調查點分佈圖 Fig.15 The map of KDE on canopy gap analysis overlap-
ping with field investigation sites.
圖16 林相、岩性調查區位示意圖
Fig.16 The investigation area of forest form and lithol- ogy.
(3) 砂岩:岩性所屬砂岩之邊坡,其岩體強度較高、固結較 良好,岩石弱面裂隙分佈密度較泥岩低,植生相對較難 生長於此類環境下 (圖 17 g)。
(4) 泥岩:膠結程度較差,受地質構造與應力作用下,此類 岩性下岩石弱面裂隙分布廣,容易裂解與風化形成土壤。
植生相對較易於生長,樹冠孔隙間距相對較小 (圖 17 h)。
(5) 崩積層:岩石或土壤物質經滾動、滑動或崩塌等重力作
用,使顆粒尺寸不同之土壤、岩屑及岩塊混雜堆積,其 淘選度較差;其堆積物顆粒成角粒狀,故與沖積層之沉 積特徵不同 (圖 17 i)。另由於土壤無化育作用,新生成 者表土有機物多,堆積時間較久後,有機質分解殆盡,
土壤顏色則較淡,為有利於植生生長之環境,故其樹冠 孔隙間距也相對較小。
(a) 植生林相紊亂 (b) 崩崖馬刀樹 (c) 自然邊坡-張力裂縫1
(d) 自然邊坡-張力裂縫2 (e) 植生林相平整 (f) 平地草本植生現況
(g) 砂岩 (h) 泥岩 (i) 崩積層
圖17 現場調查點現況照片 (照片位置請對應於圖 22 字母編號)
Fig.17 The result of field investigation(The location of photo please follow the letter number by Fig.22)
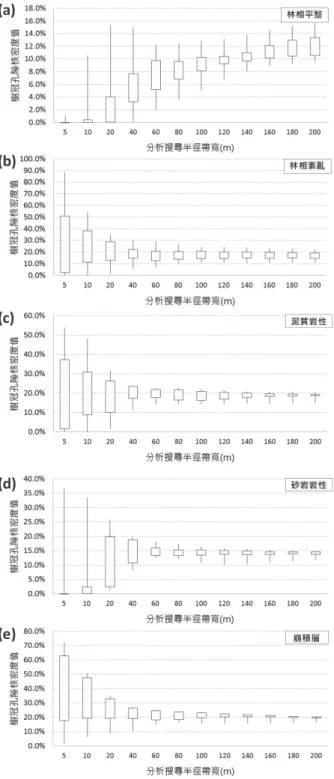
配合現場調查五類成果,進行核密度分析搜索圓域半徑之 帶寬h 設定,本研究採 5~200 公尺之範圍進行帶寬設定測試,
經帶寬測試分析後之樹冠孔隙值,匯入現地調查點位進行比對,
以箱形圖 (box-plot) 瞭解各搜索圓域半徑帶寬下,樹冠孔隙 核密度數值之離散程度,顯示帶寬掃描半徑設定120 公尺時於 林相平整類別時有值域收斂之狀況 (圖 18 a),其餘類別於該 設定下大致亦有收斂之情形 (圖 18 b~e),故以該值做為本研 究之樹冠孔隙核密度分析之帶寬設定。
現地調查點位配合樹冠孔隙核密度分析圖層成果 (圖 15),
依數值統計分析取得各類別之樹冠孔隙核密度數值 (表 4),該 值越小代表樹冠孔隙之密集程度低,反之該值大則代表樹冠孔 隙之密集程度高,整體值域落於0~0.279。樹冠孔隙核密度數 值與不利於邊坡穩定之現地狀況 (林相紊亂、泥岩及崩積層) 成正比,值域則大多落於0.141 以上;而以蝕溝流經之區域,
對其線型周遭10 公尺進行環域分析後,其樹冠孔隙密度值亦 相對較高,平均值為0.173。另據各類別之樹冠孔隙核密度平
均值由低至高以圖19 之驗證範圍進行圖層色階填色,進行現 場抽查驗證後,顯示樹冠孔隙核密度分析已可大致反映現場可 能環境。
表4 現場調查種類對應之樹冠孔隙核密度統計數值
Table 4 The canopy gap density value on KDE analysis and the field investgation type
樹冠孔隙核密度統計值 最低 平均 最高
林相平整 0.068 0.102 0.132 砂岩 0.103 0.141 0.160 林相紊亂 0.114 0.161 0.243
泥岩 0.144 0.201 0.215 崩積層 0.156 0.219 0.226
4. 光達地貌特徵判釋與驗證
此小節為驗證DSM 萃取之樹冠孔隙與坡體穩定關聯性,
使用詮華測繪公司以Optech Orion 200, Leica ALS 60 空載光達 掃描儀器產製之1m 解析度剝除樹高之高程數值模型 (Digital Elevation Model, DEM) 進行微地形判釋,並納入日照陰影圖 灰度值進行比對。微地形判釋之部分,本研究關注於不利於坡 體穩定之地貌進行判釋,分別為崩崖、蝕溝以及崩塌地堆積地 形三類。數化判釋方法依循 Soeters & van Westen(1996)、
Chigira(2011) 以及渡正亮及小橋澄治 (1987) 對其上述特徵 之定義進行辨識,相關定義說明與判釋數量如下:
圖18 不同帶寬設定與樹冠孔隙核密度值箱形圖
Fig.18 The different ridius of KDE analysis and the box-plot on canopy gap density
圖19 驗證區域樹冠孔隙核密度分析成果
Fig.19 The validation result of distribution of canopy gap
(1) 崩崖為坡體陷落後之陡崖,多為坡體頭部破壞後之崩崖 (共數化出 10 處)。
(2) 蝕溝為等高線凹向山體稜線之區位,易造成側蝕與下切 之河流侵蝕作用造成坡體失穩崩落 (數化出 120 條)。
(3) 崩塌地堆積地形則由等高線所形成之閉合橢圓,觀察形 狀中是否存在上緊下疏予以判釋,因頭部滑落崖之坡度 通常存在較陡之地貌,導致崩塌地頭部上緣等高線較為 密集;而接近坡趾處,則因崩塌材料受擠壓堆積而凸起,
等高線表現上將呈現較疏之分佈 (共數化出 30 處)。
依微地形判釋圖層與樹冠孔隙核密度分析成果比對 (圖 20),顯示樹冠孔隙密度分析值域大於 0.141 之區域,可捕捉不 利於邊坡穩定之微地形判釋地貌 (含崩崖、蝕溝與崩塌地堆積 地形) 達 57.5%之捕捉率;個別圖層之捕捉率,則以崩塌地堆 積地貌之捕捉率最高 (25 處,捕捉率 83.3%)、崩崖地貌次之 (6 處,捕捉率 60%),蝕溝地貌居末 (61 條,捕捉率 50.8%)。
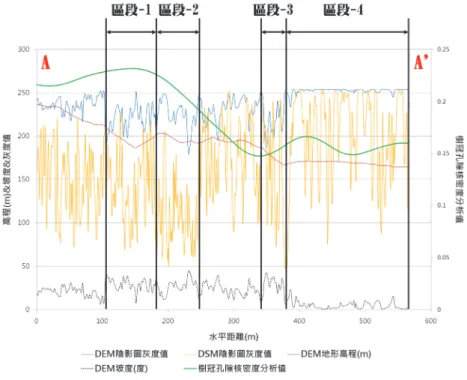
日照陰影圖之灰度值與地形以及樹冠孔隙核密度分析值 之關聯性之部分,本研究選取同時具備稜線、蝕溝、地形粗糙 度較高之丘狀地形 (Hummocky relief) 與平坦地之 A-A’剖面 進行討論 (圖 20)。討論前先針對陰影圖之灰度值作定義,該 值域落於0~255,值域越高顯示於連續地形之狀況下該區位地 形起伏變化小、地形粗糙度低,陰影圖面則會顯示光亮;反之 亦然。由 A-A’剖面萃取之資訊 (圖 21),可見其區段-1 落於 DEM 高程陷落處且高差與坡度變動大,處於地形粗糙度高之 蝕溝地形,在此林木生長環境不佳之狀況下,使DSM 陰影圖 灰度值上下跳動幅度大,樹冠孔隙核密度值高;區段-2 落於崩 塌地堆積地形,地形起伏與高差較區段-1 低,僅局部坡度變化 大,故該區段DSM 陰影圖灰度值僅於坡度跳動區域低,但整 體樹冠孔隙核密度分析值相較區段-1 低,但仍相對其他區段 仍屬較高之狀況;區段-3 因地形陡降造成坡度上升,植生較易 因地形陡峻、根系較難附著坡體,植生生長環境不佳之狀況下 使DSM 陰影圖灰度值變動幅度增加,樹冠孔隙核密度分析植
上升;區段-4 為地形平坦處,故可見 DEM 陰影圖灰度值跳動 幅度小,但因DSM 會反映房舍高程,使 DSM 陰影圖灰度值
於房舍邊牆處產生跳動狀況,惟房舍邊牆聚集性不如植生樹冠 孔隙聚集程度高,故樹冠孔隙核密度分析值處較低之狀況。
圖20 光達微地形判釋與樹冠孔隙核密度關聯性分析
Fig.20 Analysis on the relevance between Lidar micro-photography interpretation and canopy gap analysis
圖21 DEM、DSM 陰影圖灰度值與地形資訊以及樹冠孔隙密度值關聯性分析
Fig.21 Analysis on the relevance between grayscale value of DEM and DSM shaded relief and canopy gap analysis
四、討論與總結
無人載具與非常規攝影近年技術發展蓬勃,故對於提供植 生樹冠發展之DSM 地形建模技術越來越普及。於密林遍布之 邊坡環境下,植生孔隙率密集程度對於初期調查與經費考量,
將可提供重點調查位置之選定,可依本研究方法提供有效率之 資訊。
根據本研究之樹冠孔隙密度分析成果,地形粗糙度越高,
則使DEM 與 DSM 之日照仰角 90 度下陰影圖灰度值變動量 上升,DEM 與 DSM 日照陰影圖灰度值則成反比,而與樹冠
孔隙核密度分析值成正比;也就是地形起伏變動大之環境,較 不利於植生生長。而於上述之環境下,根據現場查核檢視後,
證明現場植生生長環境與植生樹冠孔隙確實有其關連性,如:
坡度較緩處植生樹冠發展較有一致性,樹冠孔隙核密度值較低 (<0.114);岩性狀況偏屬砂岩或岩層風化程度較低之區位 (0.103~0.16),較泥岩 (0.144~0.215) 與崩積層 (0.156~0.226) 之樹冠孔隙核密度值稍低,其原因與植生較難以生長於岩坡較 穩固之自然環境有關;而坡體受地形轉折 (緩轉陡)、蝕溝侵蝕、
土 砂 崩 落 等… 狀 況 下 , 則 因 林 木 倒 塌 造 成 林 相 紊 亂 (0.114~0.243) 使之樹冠孔隙核密度值較林相平整之樹冠孔隙 核密度值高。整體的樹冠孔隙核密度數值與不利於邊坡穩定之 現地狀況 (林相紊亂、泥岩及崩積層) 成正比。
本研究區域樹冠孔隙核密度分析值域範圍為0~0.279,大 於值0.141 時可捕捉出不利於邊坡穩固之微地形特徵,捕捉率 可達57.5%;若於崩塌地堆積地貌之捕捉率則可達 83.3%,顯 示本研究之樹冠孔隙核密度分析成果與坡體穩定之關聯性評 估,已可初步提供重點調查及坡體破壞熱點之參考。
五、誌 謝
感謝行政院農業委員會水土保持局提供計畫經費 (計畫 編號:SWCB-104-052),方使本研究順利完成,於此特別致謝。
另對於逢甲大學營建及防災研究中心於工作期間提供之協助,
感謝對此研究付出之辛勞與努力。
參考文獻
[1] Agliardi, F. (2001). “Structural constraints on deep-seated slope deformation kinematics.” Engineering Geology, 59, 83- 102.
[2] Benz, U.C., Hofmann, P., Willhauck, G., Lingenfelder, I., and Heynen, M. (2004). “Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information.”
Photogrammetry and Remote Sensing, 58(3-4), 239-258.
[3] Clutter, J.L., Fortson, J.C., Pienaar, L.V., Brister, G.H., and Bailey, R.L. (1983). Timber management: A Quantitative ap- proach. New York: John Wiley.
[4] Chigira, M. (2009). “September 2005 rain-induced cata- strophic rockslides on slopes affected by deep-seated gravita- tional deformations, Kyushu, southern Japan.” Engineering Geology, 108, 1-15.
[5] Furukawa, Y., and Ponce, J. (2007) “Accurate, dense, and ro- bust multi-view stereopsis.” in Computer Vision and Pattern Recognition, 1-8.
[6] Hay, G.J., Castilla, G., Wulder, M.A., and Ruiz, J.R. (2005).
“An automated object-based approach for the multiscale im- age segmentation of forest scenes.” Applied Earth Observa- tion and Geoinformation, 7(4), 339-359.
[7] Huang, W.K., Lee, C.F., Wei, L.W., Chang, Y.L., and Chi, S.Y. (2015). “Landslide run-out derived from LiDAR micro- topography and numerical modeling: Route 9, Dakeng bridge
watershed.” 10th Asian Regional Conference of IAEG 2015, Kyoto, Japan.
[8] Kok, R.De., Schneider, T., and Ammer, U. (1999). “Object- based classifiaction and applications in the alpine forest envi- ronment.” Photogrammetry and Remote Sensing, 32(1976), 3-4.
[9] Küng, O., Strecha, C., Beyeler, A., Zufferey, JC., Floreano, D., Fua, P., and Gervaix, F. (2011). “The Accuracy of Auto- matic Photogrammetric Techniques on Ultra-light UAV Im- agery.” UAV-g Conference, Zürich.
[10] Lowe, D.G. (2004). “Distinctive image features from scale- invariant keypoints.” International Journal of Computer Vi- sion, 60(2), 91-110.
[11] Leprince, S., Berthier, E., Ayoub, F., Delacourt, C., and Avouac, J. P. (2008). “Monitoring earth surface dynamics with optical imagery.” EOS Transactions, American Geo- physical Union, 89(1), 1-2.
[12] Niethammer, U., Rothmund, S., and Joswig, M. (2009).
“UAV-based remote sensing of the slow-moving landslide Super-Sauze.” Proceedings of the International Conference on Landslide Processes: from geomorpholgic mapping to dy- namic modelling, Strasbourg, CERG Editions, 69-74.
[13] Przybilla, H.J., and Wester-Ebbinghaus, W. (1979). “Bildflug mit ferngelenktem Kleinflugzeug.” Bildmessung und Luftbildwesen, Zeitschrift fuer Photogrammetrie und Fernerkundung, 47(5), 137-142.
[14] Sakio, H., and Tamura, T. (2008). “Ecology of riparian forests in Japan: disturbance, life history and regeneration.” Springer, Tokyo.
[15] Scharstein, D., and Szeliski, R. (2002). “A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Al- gorithms.” Computer Vision, 47(1), 7-42.
[16] Shugart, H.H., and West, D.C. (1977). “Development of an Appalachia Deciduous Forest Succession Model and its Ap- plication of the Impact of the Chestnut Blight”, Journal of En- vironmental Management, 5, 161-179.
[17] Shi, X. (2010). “Selection of bandwidth type and adjustment side in kernel density estimation over inhomogeneous back- grounds.” Geographical Information Science, 24(5), 643-660.
[18] Soeters, R., and van Westen, C.J. (1996). “Landslides:
InVestigation and Mitigation.” Transportation Research Board Special Report, 247, 129-177.
[19] Strecha, C., Lindner, A., Ali, K., and Fua, P. (2009). “Training for task specific keypoint detection.” Pattern Recognition, 5748, 151-160.
[20] Swanson, F.J., and Dryness, C.T. (1975). “Impact of clear- cutting and road construction of soil erosion by landslides in the western Cascade Range, Oregon.” Geology, 3, 393-396.
[21] Swanston, D.N., and Swanson, F.J. (1976). “Timber harvest- ing, mass erosion, and steepland forest geomorphology in the Pacific Northwest.” In D.R. Coates (ed.) Geomorphology and engineering. Dowden, Hutchinson, and Ross, Inc., Strouds- burg, PA, 199-221.
[22] Swanson, F.J., Lienkaemper, G.W., and Sedell, J.R.(1976).
“History, physical effects and management implications of
large organic debris in western Oregon streams.” USDA For.
Serv. Gen. Tech. Rep. PNW-56, 15.
[23] Takasuke, S. (2000). “Introduction of Topographic Map In- terpretation for 688 Construction Engineer -Vol.3: Terrace, Hill, and Mountain.” Kokon Publisher, 689.(in Japanese) [24] Triggs, B., McLauchlan, P., Hartley, R., and Fitzgibbon, A.
(2000). “Bundle Adjustment - a Modern Synthesis.” Vision Algorithms: Theory and Practice.
[25] Watt, A.S. (1947). “Pattern and process in the plant commu- nity.” Journal of Ecology, 35, 1-22.
[26] Walter, M., Niethammer, U., Rothmund, S., and Joswig, M.
(2009). “Joint analysis of the Super-Sauze (French Alps) mudslide by nanoseismic monitoring and UAV-based remote sensing.” EAGE First Break, 27(8), 75-82.
[27] Wong, T.H., Mansor, S.B., Mispan, M.R., Ahmad, N., and Sulaiman, W.N.A. (2003). “Feature Extraction Based on Ob- ject Oriented Analysis.” Proceedings of the ATC 2003 Con- ference, Malaysia.
[28] Wu, T.H., Mckinnell, W.P., and Swanston, D.N. (1979).
“Strength of Tree Roots and Landslides on Prince of Wales Island, Alaska.” Canadian Geotechnical Journal, 16(1), 19- 33.
[29] Wu, T.H., and Swanston, D.N. (1980). “Risk of landslides in shallow soils and its relation to clearcutting in southeastern Alaska.” Forest Science, 26(3), 495-510.
[30] Zhang, K. (2008). “Identification of gaps in mangrove forests with airborne LIDAR.” Remote Sensing of Environment, 112(5): 2309-25
[31] 千木良雅弘 (2011),「大規模崩塌潛感區」,科技圖書股 份有限公司,臺北市。Chigira, M. (2011). The Potential Area of Large-Scale Landslides. (In Chinese), Scientific and Tech- nical Publishing Co., Ltd: Taipei, Taiwan.
[32] 王遠飛,何洪林 (2007),「空間數據分析方法」,科學出 版社,北京,66-71。(Wang, Y.F., and He, H.L. (2007). Spatial data analysis, China Science Publishing, 66-71, Beijing. (in Chinese))
[33] 內政部國土測繪中心 (2014),「103 年度發展無人飛行載 具航拍技術作業工作總報告書」,內政部國土測繪中心。
(National Land Surveying and Mapping Center, ROC. (2014).
Development of Unmanned Aerial Vehicle flight operations technical report, National Land Surveying and Mapping Cen- ter, ROC. (in Chinese))
[34] 申承翰 (2012),「無人飛行載具影像數值地形模型建置及 精度評估」,臺北科技大學土木與防災研究所碩士論文。
(Shen, C.H. (2012). Production and verification of unmanned aerial vehicle derived digital terrain model, Master Thesis, National Taipei University of Technology, Taiwan, ROC. (in Chinese))
[35] 李璟芳,黃韋凱,曹鼎志,張玉粦,冀樹勇 (2015),「微 地形判釋應用於土石流災害之三維數值模擬」,中華水土 保持學報,46(2),96-105。(Lee, C.F., Huang, W.K., Tsao, T.C., Chang, Y.L., and Chi, S.Y. (2015). “A Study of the Nu- merical Simulation of Debris Flow Hazard Combined with
Micro-Photography Interpretation.” Journal of Chinese Soil and Water Conservation, 46(2), 96-105. (in Chinese)) [36] 林信輝 (2001),「水土保持植生工程」,高立圖書有限公
司,台灣。(Lin, S.H. (2001). Vegetation engineering in soil and water conservation, Gau Lih Book Co. Ltd., Taiwan. (in Chinese))
[37] 林慶偉 (2012),「空載光達數值地形找尋潛在大規模崩塌 的利器」,地質,31(2),44-48。(Lin, C.W. (2012). “Appli- cation of Airborne LiDAR DEM for extracting Deep-seated landslide.” Journal of Taiwan Geology, 31(2), 44-48. (in Chi- nese))
[38] 徐偉城 (2007),「LiDAR 與環境調查/監測災害防救應用」,
國土資訊系統通訊,61,69-79。(Xu, W.C. (2007). “Appli- cation of LiDAR and environmental survey/ the monitoring of Disaster Prevention.” Journal of National Geographic In- formation System, 61, 69-79. (in Chinese))
[39] 陳癸杏 (2012),「以空載光達資料判釋微地形特徵及深層 滑動之關聯分析」,國立成功大學資源工程學系碩士論文。
(Chen, K.H. (2012). The Linkage Analysis of Deep Seated Landslide to the Micro Geomorphology Characters Derived from Airborne LiDAR, Master Thesis, National Cheng Kung University, Taiwan, ROC. (in Chinese))
[40] 陳奕中,侯進雄,謝有忠,陳柔妃,吳若穎 (2014),「高 解析度空載光達資料結合地形開闊度分析於構造地形特 徵之應用」,航測及遙測學刊,18(2),67-78。(Chen, Y.Z., Hou, C.S., Hsieh, Y.C., Chen, R.F., and Wu, R.Y. (2014).
“Application of high-resolution LiDAR DEM for extracting terrain openness: A case study in the Tsaoling landslide area.”
Journal of hotogrammetry and Remote Sensing, 18(2), 67-78.
(in Chinese))
[41] 黃韋凱,林銘郎,陳良健,林彥享,蕭震洋 (2010),「物 件導向分析方法應用於遙測影像之分區及崩塌地與人工 設施分類」,航測及遙測學刊,15(1),29-49。(Huang, W.K., Lin, M.L., Chen, L.C., Lin, Y.H., and Hsiao, C.Y. (2010).
“Applying Object-Oriented Analysis to Segmentation and Classification of Landslide and Artificial Facilities with Re- mote Sensing Images.” Journal of hotogrammetry and Re- mote Sensing, 15(1), 29-49. (in Chinese))
[42] 黃美甄 (2014),「地面控制點對無人飛行載具數值地形模 型精度影響之評估」,臺北科技大學土木與防災研究所碩 士論文。(Huang, M.Z. (2014). Quality evaluation of un- manned aerial vehicle-associated digital terrain model by means of ground control points, Master Thesis, National Tai- pei University of Technology, Taiwan, ROC. (in Chinese)) [43] 黃志傑 (2015),「應用無人載具進行邊坡調查與分析初
探」,國立暨南國際大學土木工程學系碩士論文。(Huang, Z.J. (2015). Preliminary Study on Investigation and Analysis of Slope with UAV, Master Thesis, National Chi Nan Univer- sity, Taiwan, ROC. (in Chinese))
[44] 渡正亮,小橋澄治 (1987),「地すべり・斜面災害の予知 と対策」,山海堂,東京。(Watarase R., and Kohashi K.
(1987). Prediction and measures for landslide and slope dis- aster, Sankaido, Tokyo.(in Japan))
[45] 楊宗岳,羅國峯,林永仁,黃勤財 (2009),「應用無人飛 機於公路防、救災之可行性探討」,臺灣公路工程,35(12),
2-9。(Yang, Z.Y., Lo, G.F., Lin, Y.R., and Huang, K.C. (2009).
“Application of Unmanned Aircraft for road disaster preven- tion.” Taiwan Highway Engineering, 35(12), 2-9. (in Chi- nese))
[46] 經濟部中央地質調查所 (2006),「活動斷層調查報告-旗 山斷層」,經濟部中央地質調查所。(Central Geological Sur- vey, MOEA. (2006). Study of Active Fault Survey - Qishan fault, Central Geological Survey, MOEA. (in Chinese)) [47] 經濟部中央地質調查所 (2006),「五萬分之一臺灣地質圖
說明書-美濃圖幅」,經濟部中央地質調查所。(Central Geological Survey, MOEA. (2006). 1/50,000 Taiwan geo- logic map of Mino, Central Geological Survey, MOEA. (in Chinese))
[48] 經濟部中央地質調查所 (2010-2012),「國土保育之地質 敏感區調查分析計畫-莫拉克颱風受災區域之地質敏感 特性分析」,正式報告書。(Central Geological Survey, MOEA. (2010-2012). Project of Investigation and Analysis for Geologically Sensitive Areas under the Program of Na- tional Land Preservation - Geological suscepitability analysis
in areas left intact by Morokot typhoon, official report. (in Chinese))
[49] 顏君毅,張中白 (2007),「遙測影像技術與勘災/防災應 用」,國土資訊系統通訊,61,57-68。(Yan, J.Y., and Zhang, C.B. (2007). “Application of Remote Sensing technology and disaster survey/ Disaster Prevention.” Journal of National Ge- ographic Information System, 61, 57-68. (in Chinese)) [50] 羅時凡,陳淯婷,沙學均,陳朝圳 (2008),「林木健康指
標之建立與效度評估」,林業研究季刊,30(3),41-52。
(Luo, S.F., Chen, Y.T., Sha, H.C., and Chen, C.T. (2008) “Va- lidity analysis and development for the index of tree health.”
Quarterly Journal of Forest Research, 30(3), 41-52.(in Chi- nese))
2017 年 04 月 25 日 收稿 2017 年 05 月 16 日 修正 2017 年 09 月 26 日 接受 (本文開放討論至 2018 年 03 月 31 日)