國 土 測 繪 與 空 間 資 訊
Taiwan Journal of Geoinformatics
第八卷 第一期 中華民國一O九年一月
VOLUME 8, NO. 1 January 2020
Published by Chinese Society of Cadastral Survey &
National Land Surveying and Mapping Center 內政部國土測繪中心共同發行
Vol. 8, No. 1, pp. 1 ~ 21
重大地震對臺灣地區 e-GNSS 系統營運因應之研究
陳鶴欽1* 蕭世民2 鍾岳龍3 莊峰輔4
論文投稿日期:108.07.03 論文修改日期:108.11.19 論文接受日期:108.12.24
摘 要
e-GNSS 即時動態定位系統提供 2 公分定位精度的即時動態定位服務,現為 國內重要的空間資訊蒐集工具,惟臺灣位於板塊碰撞地區,長期擠壓造成地表持 續位移,e-GNSS 系統須配合更新坐標以維持基準站間之高精度相對關係。
107 年 2 月 6 日晚上 23 點 50 分(UTC 15:50),花蓮縣近海發生規模 6 級淺層 地震,經檢測結果,最大位移量約為 45 公分(交通部中央氣象局之花蓮氣象站,
HUAL),因應此狀況,內政部國土測繪中心更新區域內 11 個基準站坐標,辦理 53 個基本控制點檢測,結合兩者成果更新三維坐標轉換模型,經動態檢測 43 個 更新後之基本控制點,精度符合國土測繪中心預期。
未來針對突發的大地震,內政部國土測繪中心應啟動應變機制,透過檢測、
坐標及模型更新等作為,維持系統服務效能與精度,同時亦應檢測區域內之基本 控制點,確認其精度符合後續應用測量使用。
關鍵字:e-GNSS 即時動態定位系統、地震、網路化 RTK、連續基準站
1 課長,內政部國土測繪中心控制測量課。
2 技士,內政部國土測繪中心控制測量課。
3 技士,內政部國土測繪中心控制測量課。
4 專員,內政部國土測繪中心控制測量課。
* 通訊作者,TEL:(04)22522966 轉 250,E-mail: [email protected]。
A study on the impact of e-GNSS system in Taiwan and its operation due to severe earthquakes
He-Chin Chen1*, Shin-Min Hsiao2, Yuen-Lung Jung3, Feng-Fu Juang4
ABSTRACT
The e-GNSS real-time kinematic positioning system (e-GNSS for short) provides the real-time RTK service with 2 cm precision and has been used for geospatial data collection. The e-GNSS updates the CORS coordinates regularly to keep the interrelationship because of the surface displacement in Taiwan.
The 6.2 magnitude earthquake made several residential buildings either collapsed or tilted on 6 Feb, 2018 at 11:50 PM, and the biggest displacement is about 45 cm (HUAL). National Land Surveying and Mapping Center (NLSC) updated 11 CORS’
coordinates, 53 basic control points and the transformation model after detecting and recalculating the displacement. The results show the horizontal precision is less than 5 cm, and the vertical precision is less than 10 cm.
By this experience, after a severe earthquake, it is necessary that NLSC recalculate the system coordinates and the transformation model to keep the service in accurate precision. Meanwhile, NLSC also should examine the precision of basic control points in the region to ensure the precision fits surveying work.
Keywords: e-GNSS, Earthquake, VBS-RTK, CORS
1 Section Chief, Control Survey Section, National Land Surveying and Mapping Center.
2 Associate Technical Specialist, Control Survey Section, National Land Surveying and Mapping Center.
3 Officer, Control Survey Section, National Land Surveying and Mapping Center.
4 Executive Officer, Control Survey Section, National Land Surveying and Mapping Center.
* Corresponding author, TEL:+886-4-22522966 ext. 250, E-mail: [email protected].
一、 前言
臺灣位於歐亞大陸板塊及菲律賓海板塊交界處,為一活躍的板塊邊界區域(Yu, et al. 1997; Yu et al. 1999; Yu and Kuo, 2001),地殼的應變速率約為 0.1-1.0 μstrain/yr (Bos et al., 2003; Chang et al., 2003; Hsu et al., 2009a),在臺灣西南部旗山斷層至六 甲-木屐寮斷層間有約 0.7-1.4 μstrain/yr 之最大壓縮量(Yu and Chen, 1994),在震間 時期(interseismic period),臺灣東部地區的地表速率可達約 7 公分/年。自有大地 測量紀錄以來,臺灣因為大地震造成的同震位移量(coseismic displacement),小則 約 3 公分,如民國 99 年芮氏規模(以下簡稱 ML)6.2 甲仙地震(Ching et al., 2011),
大則可達約 10 公尺,例如民國 88 年 ML 7.3 集集地震(Yu et al., 2001)。民國 88 年 ML 7.3 的集集地震與民國 92 年 ML 6.4 的成功地震均有顯著的震後變形(Hsu et al., 2002; 2007; 2009b; Yu et al., 2001; Chen et al., 2006; Cheng et al., 2009)。另臺灣 地區地震活動十分頻繁,依據中央氣象局民國 90~民國 104 年 15 年的觀測資料 顯示,臺灣地區平均每年約發生 26,686 次地震,其中約有 965 次為有感地震(中 央氣象局,2018),顯見重大地震活動對於國家坐標系統及各級控制測量的成果精 度將會造成嚴重影響,各地區每年會有不同方向及量級的穩定平面位移量,以內 政部 93 年度辦理「一、二等衛星控制點檢測工作」案成果為例(圖 1),將檢測成 果約制在金門追蹤站(KMNM),可發現臺灣本島地區可依平面位移量及方向概略 劃分 5 個區域。
(一)、 西部平原地區:臺北市以南至臺南市沿海地區,每年位移量約 1~2 公分向 西。
(二)、 中部山區:每年位移量約 4~5 公分向西。
(三)、 宜蘭地區:每年位移量約 4~5 公分向東南。
(四)、 南部地區:臺南市山區、高雄市及屏東市,每年位移量約 5~7 公分向西南。
(五)、 東部地區:每年位移量約 7~8 公分向西。
由上可知臺灣本島地區之各基準站相對位移量級及方向不一,e-GNSS 即時 動態定位系統(以下簡稱 e-GNSS 系統)為提供即時定位服務,核心軟體廠商 Trimble 建議各基準站間之坐標反算空間距離與每個時刻實測距離之較差小於 1 公分,以維持各基準站點位間之高精度相對關係,故為提升即時動態定位效能,
各基準站坐標須參考各地區坐標移位量級大小及方向等資訊,定期辦理基準站精 密坐標維護更新。
依鄭世楠與葉永田(2004)研究指出,一般所謂的大地震,是指地震規模大於 或等於 7.0 的地震。另依據中央氣象局網頁臺灣地區百年重大地震傷亡損失資料 顯示(1903-1999),11 次的災害地震中最大地震規模為 7.3,僅 1 次為地震規模 5.8,
其餘均大於地震規模 6.0,考量實務作業需要,本研究採用地震規模 6.0 作為研究 重大地震的門檻值及後續應用,以符合實務操作。
圖 1 93 年度一、二等衛星控制點檢測工作衛星控制點水平速度量圖(修改自內政 部,2006)
內政部國土測繪中心(以下簡稱國土測繪中心)為提升國內測繪技術,於民國 92 年起開始建置 e-GPS 即時動態定位系統,e-GPS 坐標系統參照 TWD97[1997]
定義在 IRTF94 框架(Yang et al., 2001),選定以竹南基準站(JUNA)為坐標起算約制 站,其成果係由 TWD97[1997]下之陽明山站(YMSM)推算而得,並在民國 98 年更 新為 e-GPS[2009]。民國 103 年確定每 2 年更新 1 次之更新頻率,同時配合系統 更名為 e-GNSS 坐標系統(內政部國土測繪中心,2014),民國 104 年度則為因應長 期營運維護及設備管理便利,將坐標起算約制站由竹南基準站(JUNA)改為設置在 國土測繪中心樓頂之基準站(LSB0),歷年變動情形如表 1。
e-GNSS 系統坐標係由國土測繪中心蒐集中央研究院地球所、交通部中央氣 象局、經濟部中央地質調查所、水利署、農委會林務局南投林區管理處、臺中市 政府、臺南市政府及高雄市政府等機關所設置超過 365 個衛星基準站資料進行解 算,以 e-GNSS[2017]為例,為利用自 105 年 12 月 1 日至 106 年 1 月 31 日接收之 衛星觀測資料及 IGS 公布之衛星精密星曆,採用 Bernese 研究型基線及網形平差 計算軟體,重新解算各基準站之精密坐標 e-GNSS[2017],於 106 年 5 月 1 日更新 臺灣本島地區基準站坐標為 e-GNSS[2017];至於澎湖、金門及馬祖地區,則仍維 持現有 TWD97[1997]坐標框架。
表 1 e-GNSS 系統歷年坐標系統變動表
時間 臺灣地區 澎湖、金門及馬祖地區
97.5.1*1~98.7.1 e-GPS[2007]
TWD97[1997]
98.7.1~103.1.1 e-GPS[2009]
103.1.1~104.4.30 e-GNSS[2013]
104.5.1~106.4.30 e-GNSS[2015]*2
106.5.1~ e-GNSS[2017]
備註:
1. 本系統於 97 年 5 月 1 日開始試營運,98 年 1 月 1 日正式營運。
2. 最小約制點位由竹南基準站(JUNA)104 年起更改為測繪中心(LSB0)。
除前述地表穩定位移量外,臺灣本島亦為地震發生頻繁地區,也常因突發之 地表位移,造成政府測繪部門所建置的基本控制點精度遭受破壞,無法符合原本 測設精度,影響後續使用。例如民國 88 年 921 集集大地震在南投縣集集鎮附近發 生芮氏規模 7.3 級強烈地震,對位處震央附近之南投縣、臺中縣市,造成重大災 害。由車籠埔斷層所引起之強烈地震,造成地層地表嚴重錯動擠壓隆起,範圍長 達約 90 公里,震災地區除房屋倒塌位移、地表隆起變形及嚴重山崩外,對為測量 基礎之基本三角點以及對民眾之土地權益(如宗地面積、界址位置、道路位置)等 皆產生相當程度之影響(內政部國土測繪中心網頁,2019)。
民國 88 年當時國土測繪中心尚未建立 e-GNSS 即時動態定位系統提供即時性 公分級定位服務,但是依據該上述中心網站顯示,平面最大位移量位移為 1.63 公 尺,垂直方向最大上升量 8.45 公尺,依照前開位移量研判,倘當時有 e-GNSS 系 統,應該是無法提供高精度定位服務及維持系統營運。而發生在 105 年 2 月 6 日 半夜芮氏規模 6.6 之美濃地震,雖造成臺南地區 117 死亡,551 人受傷,然而在 105 年 2 月 6 日當日上午,國土測繪中心已利用當時所擁有基準站及超快速星曆 資料,計算出美濃地震震後基準站位移量,發現最大位移量不超過 3 公分(如圖 2),這樣的位移量對 e-GNSS 系統而言,似乎尚在可容忍範圍內,研判應不影響 系統營運,故未有啟動系統基準站坐標重新計算及三維坐標轉換模型重建等作業
。
圖 2 20160206 美濃地震震後基準站位移圖
二、 0206 花蓮地震檢測作業
107 年 2 月 6 日晚上 23 點 50 分,花蓮縣近海發生芮氏規模 6.2 之淺層地震,
造成花蓮市附近區域多處建築物倒塌及人員傷亡,為確認及維持該區域 e-GNSS 系統服務效能與精度,國土測繪中心啟動一連串檢測作為,於 2 月 8 日派員進 行 e-GNSS 檢測作業並公告基準站位移情形,自和平基準站(HUAP)至鳳林追蹤 站(FLNM)之間區域,對於高精度定位測量作業,公告建議避免使用 e-GNSS 系 統服務並不予收費。嗣於 2 月 23 日重新公告基準站坐標成果,並自 3 月 1 日起 恢復上開地區 e-GNSS 系統服務。另自 2 月 27 日~3 月 21 日辦理基本控制點檢 測工作,期間辦理工作項目、時間如圖 3,並將經過簡述如下((內政部國土測繪 中心,2018;內政部國土測繪中心網頁,2019)。
圖 3 0206 花蓮地震因應作為時間表 (一)、 檢測基準站位移
資料處理範圍為南宜蘭縣、花蓮縣及北臺東縣,西側以新竹尖石泰崗站 (THAI)及玉山北峰站(YUSN)範圍內,共計 53 站資料。觀測資料計算時間則以 主震前 16 小時及震後 8 小時等 2 個時間段為主,使用 IGS 提供超快速星曆,並 以 Trimble 公司的 Trimble Business Center 軟體計算地震前、後之位移量,所有 成果約制在金門追蹤站(KMNM),相關成果於 2 月 7 日快速完成併提供國內相關 單位使用。比較 2 個時間段之 53 個基準站坐標成果,2 者較差即為本次地震所 造成之地殼位移,最大位移量為交通部中央氣象局之花蓮氣象站(HUAL),往東 北北方向位移約 45 公分(dN:42.6cm,dE:14.8cm),而其中位移量超過 1 公分 的基準站有 11 個,較差表如表 2,地表位移圖如圖 4。
表 2 0206 花蓮地震基準站地震前後坐標較差表
20180206 花蓮地震前後坐標較差 單位:公分
點號 dN dE dh S 站名 建置單位
HUAL 42.6 14.8 6.3 45.1 花蓮氣象站 氣象局 HUAP -2.1 -0.1 2.5 2.1 和平 氣象局 NDHU -5 -8.6 4.3 9.9 東華大學 氣象局
NSAN -1.2 0.2 2.5 1.2 南山 氣象局
PEPU -26.3 -6.2 10.1 27 北埔 氣象局 SCHN -9.8 0.2 -0.1 9.8 新城 中研院 SHUL 2.1 -0.1 0.5 2.1 水璉國中 氣象局 SICH -9.7 0.1 -0.5 9.7 新城 測繪中心 SLIN -0.3 -1.6 2.4 1.6 西林 氣象局 SOFN 8.8 -1.5 0 8.9 壽豐 測繪中心 YENL 19.1 -1.5 -3.3 19.2 東管處 氣象局
(二)、 更新基準站坐標
挑選宜蘭南澳基準站(NAAO)以南,花蓮鳳林追蹤站(FLNM)以北及宜蘭棲 蘭基準站(CLAN)及南投高峰基準站(KFN2)之範圍內約 22 個基準站,蒐集 2 月 7 日至 2 月 13 日之基準站衛星觀測資料,搭配 IGS 之快速精密星曆(IGR),約制 測繪中心基準站(LSB0),以 Bernese 軟體重新解算基準站坐標為 e-GNSS[2017A],
於 2 月 23 日公告更新本次地震前、後位移超過 1 公分之 11 個基準站坐標,同 步更新 e-GNSS 系統三維坐標轉換模型。
(三)、 辦理基本控制點檢測
更新坐標及轉換模型後,國土測繪中心於 2 月 13 日使用 3 組儀器,於 44 個基本控制點上辦理動態定位檢測,成功解算 43 點,但將檢測成果透過三維坐 標轉換模型轉換至法定坐標系統 TWD97[2010]分析,發現部分點位與公告坐標 仍有較大差值,顯示新三維坐標轉換模型精度未達預期。
經分析基準站位移結果顯示,地震造成之北花蓮地區地表位移複雜,區域 內之基本控制點精度已不符規定,國土測繪中心挑選北從花蓮和平,南至鳳林,
西至中央山脈為檢測範圍,並結合花蓮縣政府及花蓮地政事務所資源,於 2 月 27 日至 3 月 2 日共安排 18 組人力儀器進行外業測量,採 6 小時蛙跳式靜態觀測 辦理 53 個基本控制點檢測,並與範圍內 22 個基準站進行聯合計算處理,檢測 範圍圖如圖 5。
(四)、 更新基本控制點坐標及三維坐標轉換模型
為分析基本控制點位移量及其更新公告坐標之必要性,國土測繪中心採用 逐級套合方式進行平差計算,先行檢測花蓮地區衛星基準站約制於 TWD97[2010]
之相對關係,挑選出相對精度優於 1/100,000 之基準站作為「約制點」,相對精 度低於 1/100,000 之基準站則重新計算坐標以作為「次級約制點」,兩者併同基 本控制點組成基線網一併解算新坐標成果為 TWD97[2010A]。
將 53 個基本控制點成果納入轉換共同點,重新計算三維坐標轉換模型,並 於 3 月 6 日進行基本控制點即時動態定位測量檢測,驗證模型更新後即時動態 定位成果精度,經動態檢測 43 點更新後之基本控制點,精度符合預期(平面較差
≦5 公分,高程較差≦10 公分)。
國土測繪中心以 107 年 3 月 31 日測控字第 1070400127 號函報辦理花蓮縣 地震後續基本控制點檢測工作成果,經內政部 107 年 4 月 20 日台內地字第 1071302871 號公告提供各界使用。
圖 4 0206 花蓮地震地表位移圖 圖 5 6 小時基本控制點檢測範圍圖
三、 重大地震對 e-GNSS 系統營運實務探討與分析
從地震發生後至辦理基本控制點檢測作業過程中,陸續發現與 e-GNSS 系統 營運相關問題,透過成果分析逐一釐清解決,茲將主要遭遇問題與解決方法條列 如下,以作為未來系統營運及遭遇重大地震事件的處置參考。
(一)、 重大地震造成地表錯動,需更新基準站坐標:
臺灣位於板塊交界處,板塊擠壓作用造成基準站有區域性、長期的位移現象,
以位移量較大的東部地區為例,每年位移量約往西 7~8 公分,e-GNSS 系統坐標 固定每 2 年更新 1 次,故在新坐標上線服務前,臺灣本島地區最大的基準站位移 量大概為 10~15 公分不等(約制主站 LSB0),但因此為大範圍區域整體移動,除在 區域交界兩側之基準站間會發生相對距離精度較差之現象外,絕大部分基準站間 仍會維持良好的相對關係,待測點位與最近的實體基準站位移量亦相當,故使用 者求得固定解的時間會隨著基準站間相對關係變差而逐漸變長,但仍能維持相對 可靠之定位精度。
分析 0206 花蓮地震之基準站震前震後觀測資料,11 個基準站中有 7 個基準站 位移量超過 8 公分,最大位移量為 45 公分,其餘 4 個基準站位移量約略在 2 公分,
顯示區域地表在短時間內有不規則且較大的位移量,而檢測範圍內部分基準站位 移量過大,對 e-GNSS 系統在該地區之定位精度應造成相當影響。為了解震後未 更新基準站坐標之動態定位成果,及進一步位移細部資料,2 月 13 日國土測繪中 心派員於花蓮地區已知控制點上進行即時動態定位測量,測試系統定位服務效能 及蒐集地表位移資訊。
進行 RTK 定位時,移動站完成載波相位之週波未定值求解後,其狀態稱為 得到固定解(FIXED)。在地震前,花蓮地區使用者通常與 e-GNSS 系統連線後,數 秒鐘內即可得到固定解,惟 2 月 13 日挑選辦理花蓮地區 30 點基本控制點(以易到 達點位為主)進行 e-GNSS 檢測,僅 17 個點位可成功獲得動態固定解,成果精度 不佳且與公告坐標之較差無規則性,最大較差 U043 約 0.817 公分(dN:-0.766m, dE:
-0.285m, dh:-0.099m)。
相關成果顯示,震後的 e-GNSS 系統部分地區成果精度已不如預期,且因基 準站受震後位移影響,其實際相對關係與坐標反算結果差異過大,以致辦理即時 動態定位時不易獲得固定解,需更新基準站坐標以符合實際狀況,提升定位服務 精度及效能。
國土測繪中心於 2 月 23 日更新基準站坐標後,為驗證系統服務精度與效能,
再次於 3 月 8 日使用 3 組儀器,於 44 個基本控制點上辦理動態定位檢測,成功解 算 43 點(解算失敗為 E008 米崙山,因透空不良),相關成果較差顯示,基準站坐 標更新後動態觀測成功率由 57%提高至 98%(如表 3)。
表 3 e-GNSS 系統基準站坐標更新前後檢測成果比較表 基準站坐標修正前 基準站坐標修正後
規劃觀測點數 30 44
動態觀測成功點數 17 43
快速靜態解算點數 13 0
無成果點數 0 1
(二)、 第 1 次更新三維坐標轉換模型:
更新基準站坐標後雖已提高動態觀測成功率,但在系統服務精度部分,由於 地震後基準站已有相當程度之位移,舊三維坐標轉換模型勢必無法適用,故國土 測繪中心同步更新「三維坐標轉換模型」(僅使用基準站作轉換,以下簡稱轉換模 型 A),並利用 2 月 23 日外業成果進行精度驗證。將前述成果透過轉換模型 A 轉 換至法定坐標系統 TWD97[2010]分析,發現部分點位與公告坐標仍有較大差值,
顯示轉換模型 A 之轉換成果未達系統預期精度(平面及高程分別優於 5、10 公分),
比較表如表 4,示意圖如圖 6。
表 4 震後轉換模型 A 之轉換坐標與公告坐標成果比較表 點號 震後檢測 單位:公分
ᇞN ᇞE ᇞh E302 -5.5 -3.1 -4.6 E315 -1.2 1.4 -5.3 E316 -2.6 4.7 -3.5 E319 1.4 3.3 -12.2 E331 -14.5 -16 -1.6 E415 -12.5 -10.9 6.9
點號 震後檢測 單位:公分
ᇞN ᇞE ᇞh E549 3.6 -2.9 4.9 E637 -63 -8.7 -24.2 E902 1.7 -0.6 -8 E970 9.1 -0.9 -11.5 U004 -52.6 -9.8 -1.8 U007 -1.2 3.2 -8.6 U026 1.1 -1.2 -11.7 U027 2.9 1.2 -8.8 U028 5.5 0.2 -9.3 U037 96.2 78 26.9 U038 -19.3 -5.1 -13.2 U040 -5.7 -12.2 0.4 U043 46.3 27.6 19.3 U048 4.3 3.9 -6 U050 -33.7 -16.6 -2.1 U053 -6.3 -11.8 -0.4 U057 -36.1 -13.2 -3.7 U064 -8.2 -6.6 -3.8 U067 0.4 -3.2 -7 U070 5.2 8.1 -7.8 U071 -7.8 -2.8 -3.7 U074 -1 -0.3 -8.2 U077 -0.3 0.1 -7.4 U083 -0.4 1.5 -5.1 U086 0 0.5 -11.5 U091 -0.5 4.2 -9.9 U094 -17 20.4 -28.8 U096 -0.1 5.3 -9 U102 0.2 2.4 -6.9 U103 -1.2 3 -8.1 U104 -1.4 2.5 -8.4 U223 -3.2 2.3 -13.1 U224 -8.9 3.5 -11.8 U226 -52.4 -26.8 6.4 U231 0.1 0.5 -6.3 U237 0.4 0.9 -6 U239 -0.3 -1.7 -9.3
圖 6 震後轉換模型 A 之轉換坐標與公告坐標成果較差示意圖
分析前述結果,發現係因 0206 花蓮地震在小範圍(數公里)內有不規則的地 表變形位移,而三維坐標轉換模型係以基準站作為共同點進行更新,若僅以基準 站(相隔間距多為 20 公里以上)作為 0206 花蓮地震坐標轉換共同點,只能概略顯 示本次地震影響位移方向及量級,以致轉換模型 A 中的網格修正量,無法完整表 現小區域內複雜之地表擠壓變形狀況,為解決此一問題,勢必須挑選分布較密且 均勻之基本控制點,進一步辦理檢測作業並同時將檢測成果納入三維坐標轉換模 式。
針對此狀況,國土測繪中心於 3 月 21 日公告 e-GNSS 系統三維坐標轉換服 務於花蓮縣和平基準站至鳳林追蹤站之間暫停適用,並嘗試納入基本控制點檢測 成果,加強坐標轉換共同點之分布密度。
(三)、 納入基本控制點成果,第 2 次更新三維坐標轉換模型:
國土測繪中心於 2 月 27 日至 3 月 2 日共安排 18 組人力儀器,辦理花蓮地區 基本控制點檢測作業,採 6 小時蛙跳式靜態觀測辦理 53 個基本控制點檢測,再將 53 個基本控制點成果(6 個基本控制點之 TWD97[2010]坐標及 47 個基本控制點之 TWD97[2010A]),及 0206 花蓮地震後 TWD97[2010]坐標,再次更新三維坐標轉 換模型(使用基準站及基本控制點作轉換,以下簡稱轉換模型 B),轉換共同點分
布情形如圖 7。因為增加了花蓮地區轉換共同點,其點位分布與密度足以反應同 震變形造成的影響量,故轉換模型 B 精度明顯提升,平面分量較差最大為 0.046 公尺,高程分量較差最大為 0.103 公尺,較差情形如表 5。
圖 7 第 2 次三維坐標轉換模型轉換共同點分布圖
表 5 轉換模型 B 之轉換坐標與公告坐標成果比較表 點號 震後檢測 單位:公分
ᇞN ᇞE ᇞh E315 -0.9 0.5 -1.8 E316 -2.1 3.6 0.1 E319 1.1 -0.2 0.9 E331 1.2 -1.6 0.2 E415 0.1 -0.3 -7.6 E549 4 -0.6 -5.1
E637 -2.1 2.4 1
E902 0.8 0.2 -2.3
點號 震後檢測 單位:公分
ᇞN ᇞE ᇞh E970 0.1 0.7 -2.8
U004 0.1 1.7 -4
U007 -1.4 2.5 1.9 U026 0.5 -1.2 0.3 U027 0.2 -0.7 0.4 U028 0.3 -1.1 0.1 U037 1.2 1.4 4.2
U038 0.3 0 6.2
U040 -0.2 -1.4 -6.1 U043 -1.5 1.5 -10.3 U048 -0.7 2.1 -0.6 U050 0.7 -0.4 -0.7 U053 -0.8 -1.7 -4.9 U057 2.1 1.8 0.6 U064 1.1 0.7 -1.5 U067 0.5 -2.1 0.9 U070 1.5 1.7 -2.4 U071 0.6 1.4 -2.8 U074 -0.2 -0.2 -0.2
U077 0.7 -0.4 0
U083 -0.2 0.5 -1.1 U086 0.4 -0.2 2.1 U091 -0.3 3.9 2.1 U094 -0.5 -0.9 -1.8 U096 -0.6 4.6 1.4 U102 -0.4 4.6 -1.4 U103 -1.7 3.8 2.4 U104 -1.8 4.1 1.8
U223 0.9 0.5 3
U224 -0.6 -0.3 0.8 U226 1.4 1.1 -2.9 U231 0.4 -0.2 -1.1 U237 0.5 -0.7 -3.4 U239 0.5 -1.5 2.5
四、 結論與建議
0206 花蓮地震發生後,國土測繪中心隨即針對區域內 e-GNSS 系統基準站與 基本控制點辦理檢測作業,過程中透過分析 0206 花蓮地震前後基準站位移狀況,
搭配該地區基本控制點檢測作業成果,以實測方式驗證 e-GNSS 系統服務在大地 震後、更新基準站坐標後與更新三維坐標轉換模型後之效能與精度,獲得以下結 論與未來作業建議:
(一)、 花蓮地區受到 0206 地震影響,造成最大同震位移在花蓮氣象站,地表位移 約 45 公分,已對該地區 e-GNSS 系統及基本控制點造成影響,點位相對精 度已不符合原規劃精度要求。故於震後即時更新基準站與基本控制點坐標 成果,除維護我國高精度大地測量基準並提供後續測繪業務使用,亦可重 建 e-GNSS 系統三維轉換模型提供各界優質穩定的即時動態定位服務。
(二)、 網路化 RTK 技術係採用多個衛星基準站所組成的觀測網絡來估算涵蓋範 圍內之定位誤差,配合最鄰近的實體基準站觀測資料,建構虛擬基準站作 為 RTK 主站使用,因該虛擬基準站與待測移動站間距離甚短,定位誤差模 型具有高度相關的特性,在 RTK 差分解算的過程中,系統誤差即可完整地 消除,獲得高精度及高可靠度的定位成果。
1. 在未受地殼變動影響的外島地區(金門、馬祖及澎湖地區)或 e-GNSS 系 統坐標剛完成更新時的臺灣本島地區,其基準站相對關係良好(如圖 8,
坐標反算結果與實測距離幾乎一致),故誤差模型內插算出的誤差量搭 配實體基準站觀測資料,可以準確地顯示當地電離層及衛星軌道誤差等 誤差之影響量,使用者在範圍內可快速得到精準的固定解成果。
2. 臺灣本島地區每年受板塊擠壓,地表會產生穩定的位移,分析其位移量 可發現具有大範圍、均勻及一致性等特性,以整個臺灣來看,不同區域 間因位移量與方向不一致,在區域交界兩側之基準站間會發生坐標反算 結果與實測距離差異較大現象,但因此為大範圍區域整體移動,絕大部 分基準站間仍會維持良好的相對關係,待測點位與最近的實體基準站位 移量亦相當,故使用者求得固定解的時間會隨著基準站間相對關係變差 而逐漸變長,但仍能維持相對可靠之定位精度(如圖 9)。另因臺灣本島 各有不同位移區域,使用者若位於 2 區域交界範圍間測量,在外業時須 加強已知點檢核,以確保成果之可靠度。e-GNSS 系統為解決此問題,
已自 103 年起定期每 2 年更新 1 次系統坐標,同時更新三維坐標轉換模 型。
3. 當發生如 0206 花蓮地震之類的大地震,地表通常在小範圍內會產生不 規則的位移量,針對本次地震發現問題如下:
(1)、 基準站位移造成相對關係變差,導致系統服務效能降低,造成 RTK 求得固定解時間變長或甚至無法求解。
(2)、 雖然已完成基準站坐標更新,由於基準站分布間距為數公里至數
十公里不等,如果地表位移不均勻,僅以基準站作為共同點進行 更新之三維坐標轉換模型,將無法完整表現小區域內複雜之地表 擠壓變形狀況,就會發生其網格修正量無法完全反應小範圍變動 量,導致部分已知點 e-GNSS 成果經轉換至法定坐標系統後,與公 告坐標有較大較差(如圖10)。
(3)、 複雜的地表變形同時會造成範圍內已知控制點相對關係不佳,其 精度恐無法供各項應用測量後續使用。
4. 為解決前述問題,應針對範圍內之基本控制點辦理靜態測量,以逐級加 密概念更新已知點坐標成果,可重新恢復範圍內基本控制點間相對關係;
同時利用其基線計算出基本控制點之新 e-GNSS 成果,作為共同點納入 新三維坐標轉換模型中,方能提升坐標轉換精度(如圖11)。
圖 8 基準站相對關係示意圖(1) 圖 9 基準站相對關係示意圖(2)
圖 10 基準站相對關係示意圖(3) 圖 11 基準站相對關係示意圖(4)
(三)、 依據本次經驗,國土測繪中心規劃建立一個 e-GNSS 系統遭遇地震後,自 我檢查服務精度並修正恢復的標準作業程序。基本上,地震規模愈大其所 可能導致的災害應該愈大。但由於地震是一種能量的釋放,以地震波的形 式向四方傳播過程中,能量會因岩層的摩擦、吸收而衰減,所以災情大小 通常會與震源深度、震央距離相關(交通部中央氣象局網頁,2018/11/15)。
國土測繪中心規劃於地震發生後,參考交通部中央氣象局公告之地震報告,
依據其地震規模、地震深度及震央位置等資訊,評估該地震是否有可能對 e-GNSS 系統服務造成影響。若發生地震芮氏規模 6 以上且地震震源深度 在 30 公里以內,或地震芮氏規模 7 以上之地震,且地震震央位於臺灣本島 陸地,或離海岸線 20 公里範圍內之地震,先於 e-GNSS 系統網型監控模組 初步觀察震央鄰近基準站位移狀況,若發現其位移與量級較相鄰基準站明 顯不同,則開始啟動檢測機制,初步研擬流程如下(如圖 12):
大地震發生 啟動檢測機制
檢查基準站地震前 後位移
地震前後位移 是否超過3公分
更新基準站坐標
更新三維坐標轉 換模型
驗證三維坐標
未符合預期精度 轉換精度 辦理基本控制點
檢測作業
是
否 結束檢測
恢復營運
符合預期精度
圖 12 e-GNSS 系統檢測作業流程圖
1. 檢測初期應先確認檢測範圍、時間與蒐集基準站資料。首先以震央為中 心半徑 50 公里畫圓作為初步檢測範圍,可依地震芮氏規模適時擴大檢 測範圍,確認檢測範圍內之基準站數量及其所屬單位;接著聯絡與國土 測繪中心進行資料交換之單位,以地震發生時間為基準,分別向前向後 各蒐集至少 3 小時的衛星觀測資料,為爭取時效性,以商用衛星基線解 算軟體搭配預估精密星曆(IGU)或廣播星曆解算,並分析比較地震前後 基準站位移量。
2. 考量前述資料解算之誤差(僅使用商用軟體、採用預估精密星曆(IGU)或 廣播星曆及觀測時間長短等因素),若解算成果顯示地震前後基準站位 移量未超過 3 公分,視為對系統服務無影響;若超過 3 公分,則代表此 地震對地表造成一定規模的影響,應觀察主震後餘震發生之頻率,待地 殼活動較穩定後,蒐集至少連續 7 天之基準站觀測資料,以 Bernese 軟 體搭配 IGS 之快速精密星曆(IGR),約制測繪中心基準站(LSB0)重新解 算 e-GNSS 系統坐標,更新地震前後位移量超過 1 公分之基準站坐標,
並同時更新三維坐標轉換模型。
3. 挑選均勻分布於檢測區域之基本控制點,利用 e-GNSS 系統服務辦理檢 測,驗證三維坐標轉換服務精度是否符合國土測繪中心預期(平面精度 優於 5 公分,高程精度優於 10 公分),若有則結束檢測作業;若否,則 擴大辦理基本控制點檢測作業。
4. 基本控制點檢測作業之原則及程序,研擬流程如下:(圖 13)
(1)、 蒐集基準站災害前後之觀測資料,計算分析其位移情形,評估位 移量影響標準後據以規劃基本控制點檢測範圍。
(2)、 檢測範圍內之基本控制點採蛙跳式 6 小時靜態衛星定位測量進行 觀測。
(3)、 以逐級套合方式平差計算基本控制點坐標,分析點位位移量及是 否有更新坐標必要,逐級平差程序如下:
i. 解算檢測範圍內所有基準站基線,並進行全組合檢查,以具有 公告坐標且相對精度高於 1/100,000 之基準站作為約制點。
ii. 以步驟(i)選定之約制點計算其餘基準站之新坐標成果。
iii. 以步驟(ii)基準站坐標成果為約制點,計算檢測之基本控制點坐 標成果,並與原公告坐標比對,較差若小於 5 公分視為未變動,
將其併入約制點重新計算。
iv. 至步驟(iii)重新計算基本控制點之坐標成果與原公告坐標無較 差小於 5 公分點位後為最終成果。
v. 辦理更新後基本控制點坐標成果公告。
(四)、 根據以往研究顯示,通常大地震發生後,常會伴隨著數年的非線性震後變 形,如 921 大地震、331 東日本大地震,故建議應針對 0206 花蓮地震地區 持續建立地表位移觀測及處理(如連續站),以了解地表變形情形,作為後 續建立變形模式或修正的參考依據。
圖 13 基本控制點檢測流程圖
參考文獻
交通部中央氣象局,2018,http://www.cwb.gov.tw/,查閱日期:2018/11/30。
內政部,2006,「九十三年度一、二等衛星控制點檢測工作」工作報告。
內政部國土測繪中心,2019,
https://www.nlsc.gov.tw/Home/MakePage/127?level=127,查閱日期 2019/5/14。
內政部國土測繪中心,2018,重大地震對臺灣地區 e-GNSS 系統營運之因應實務 研究。自行研究報告。
內政部 107 年 4 月 20 日台內地字第 1071302871 號公告。
內政部國土測繪中心,2014,三維即時坐標轉換輔助 VBS-RTK 定位技術獲得法 定坐標系統測量成果之研究。自行研究報告。
內政部國土測繪中心,2019,107 年度 e-GNSS 營運報告,https://egnss.nlsc.gov.tw/,
查閱日期 2019/4/16。
鄭世楠與葉永田,2004,台灣百年來的大地震,科學發展,第 373 期,pp. 69-75。
Bos, A. G., W. Spakman, and M. C. J. Nyst, 2003, Surface deformation and tectonic setting of Taiwan inferred from a GPS velocity field, J. Geophys. Res., 108, 2458, doi:10.1029/2002JB002336.
Chang, C.-P., T.-Y. Chang, J. Angelier, H. Kao, J.-C. Lee, and S.-B. Yu, 2003, Strain and stress field in Taiwan oblique convergent system: Constraints from GPS observations and tectonic data, Earth Planet. Sci. Lett., 214, pp. 115-127.
Chen H.-Y., S.-B. Yu, L.-C. Kuo, and C.-C. Liu, 2006, Coseismic and postseismic displacements of the 10 December 2003 (MW 6.5) Chengkung, eastern Taiwan, earthquake, Earth Planets Space, 58, pp. 5-21.
Cheng, L.-W., J.-C. Lee, J.-C. Hu, and H.-Y. Chen, 2009, Coseismic and postseismic slip distribution of the 2003 Mw = 6.5 Chengkungearthquake in eastern Taiwan:
Elastic modeling from inversion of GPS data, Tectonophysics, 466, pp. 335-343.
Ching, K.-E., K. M. Johnson, R.-J. Rau, R. Y. Chuang, L.-C. Kuo, and P.-L. Leu, 2011, Inferred fault geometry and slip distribution of the 2010 Jiashian, Taiwan, earthquake is consistent with a thick-skinned deformation model, Earth Planet.
Sci. Lett., 301, pp. 78-86.
Hsu, Y.-J., N. Bechor, P. Segall, S.-B. Yu, L.-C. Kuo, and K.-F. Ma, 2002, Rapid afterslip following the 1999 Chi-Chi, Taiwan, earthquake, Geophys. Res. Lett., 29, 10.1029/2002GL014967.
Hsu, Y.-J., P. Segall, S.-B. Yu, L.-C. Kuo, and C. A. Williams, 2007, Temporal and spatial variations of postseismic deformation following the 1999 Chi-Chi, Taiwan earthquake, Geophys. J. Int., 169, pp. 367-379.
Hsu, Y.-J., S.-B. Yu, M. Simons, L.-C. Kuo, and H.-Y. Chen, 2009a, Interseismic crustal deformation in the Taiwan plate boundary zone revealed by GPS observations, seismicity, and earthquake focal mechanisms, Tectonophysics, 479, pp. 4-18.
Hsu, Y.-J., S.-B. Yu, and H.-Y. Chen, 2009b, Coseismic and postseismic deformation associated with the 2003 Chengkung, Taiwan earthquake, Geophys. J. Int., 176, pp. 420-430.
Yang, M., C.-L. Tseng,, and J.-Y. Yu, 2001, https://doi.org/10.1061/(ASCE)0733-9453(2001)127:4(119)
Yu, S.-B., and H.-Y. Chen, 1994, Global positioning system measurements of crustal deformation in the Taiwan arc-continent collision zone, Terr. Atmos. Ocean. Sci., 5, pp. 477-498.
Yu, S.-B., H.-Y. Chen, and L.-C. Kuo, 1997, Velocity field of GPS Stations in the Taiwan area, Tectonophysics, 274, pp. 41-59.
Yu, S.-B., L.-C. Kuo, R.-S. Punongbayan, and E.-G. Ramos, 1999, GPS observation of crustal motion in the Taiwan-Luzon region, Geophys. Res. Lett., 26, pp.
923-926.
Yu, S.-B., and L.-C. Kuo, 2001, Present-day crustal motion along the Longitudinal Valley Fault, eastern Taiwan, Tectonophysics, 333, pp. 199-217.
Yu, S.-B., L.-C. Kuo, Y.-J. Hsu, H.-H. Su, C.-C. Liu, C.-S. Hou, J.-F. Lee, T.-C. Lai, C.-C. Liu, C.-L. Liu, T.-F. Tseng, C.-S. Tsai, and T.-C. Shin, 2001, Preseismic deformation and coseismic displacements associated with the 1999 Chi-Chi, Taiwan earthquake, Bull. Seism. Soc. Am., 91, pp. 995-1012.
Vol. 8, No. 1, pp. 23 ~ 38
對流層效應對於 GNSS-R 資料估算海水面高度之影響
洪紹倫1 李啓民2 郭重言3* 藍文浩4 曾子榜5 陳國華6
論文收件日期:108.10.16 論文修改日期:108.11.20 論文接受日期:108.12.28
摘 要
近年來因氣候暖化導致全球海水面快速上升,對沿海低窪地區人民的生命和財 產安全產生嚴重威脅。因此,有效且持續監測沿岸海水面變化是一重要的研究課題。
一般而言海水面變化可利用衛星測高與潮位站來觀測,然而測高衛星在沿岸易受到 陸地訊號干擾造成觀測精度不佳;潮位站觀測則會受到地表垂直運動的影響,無法 直接獲得絕對海水面變化。近來全球導航衛星系統反射技術(Global Navigation Satellite System Reflectometry, GNSS-R)之訊噪比(Signal-to-Noise Ratio, SNR)資料證 實可有效觀測海水面高度,用來補足及改善前述兩項技術所面臨的問題。本研究取 得設於孟加拉吉大港以及臺灣和平港 GNSS 測站之 SNR 資料,利用調和分析輔助 Lomb Scargle Periodogram (LSP)法估算海水面高度變化,最後與共站或鄰近潮位站 資料比較進行精度評估。此外,對流層效應會造成 GNSS-R 估算海水面高度誤差,
因此研究中採用折射改正及對流層模型改正來評估此影響。研究結果顯示吉大港站 之 GNSS-R 成果與潮位站觀測量的差值標準偏差為 30.4 公分,相關係數為 0.97;而 和平港站之差值標準偏差為 12.8 公分,相關係數為 0.96。另一方面,吉大港站對流 層效應呈現明顯地與衛星仰角相關誤差,進行折射改正和對流層模型改正後,其差 值標準偏差分別由 30.4 公分降低為 28.1 公分和 29.4 公分。然而,臺灣和平港站的 衛星仰角相關誤差不甚明顯,其主因可能是 SNR 資料之衛星仰角較高或是天線設 置高度較低,因此對流層改正之效果有限。
關鍵詞: GNSS-R、訊噪比、對流層改正、潮汐調和分析
1 碩士生,國立成功大學測量及空間資訊學系。
2 博士生,國立成功大學測量及空間資訊學系。
3 教授,國立成功大學測量及空間資訊學系。
4 專案助理教授,國立臺灣海洋大學通訊與導航工程學系。
5 研究員,Cooperative Research Centre for Spatial Information, Australia。
6 副教授,國立臺北大學不動產與城鄉環境學系。
* 通訊作者,TEL:(06)2757575 轉 63826,E-mail: [email protected]。
Assessing Tropospheric Effects on Retrieving Sea Surface Heights from GNSS-R Data
Shao-Lun Hung1, Chi-Ming Lee2, Chung-Yen Kuo3*, Wen-Hau Lan4, Tzu-Pang Tseng5, Kwo-Hwa Chen6
Abstract
Due to global warming, global mean sea level has risen rapidly in recent years, causing many serious impacts, especially in the coastal low-lying areas. Thus, effective and continuous monitoring coastal sea level changes is an important research topic. In general, the conventional methods to measure sea level variations are to use satellite altimetry and tide gauges. However, altimetry observations in the coastal regions are inaccurate resulting from complex waveforms caused by land contaminations; tide gauge measurements are affected by vertical land motions and cannot provide geocentric (absolute) sea level changes directly. Recently, signal-to-noise ratio (SNR) data from Global Navigation Satellite System Reflectometry (GNSS-R) have been demonstrated for measuring sea surface heights. This study use SNR data from GNSS stations at Chittagong site in Bangladesh and Heping site in Taiwan to retrieve sea surface heights by Lomb Scargle Periodogram (LSP) aided with tidal harmonic analysis, and the results are compared with the nearby or co-located traditional tide gauges. In addition, the tropospheric effects would cause bias in sea surface heights from GNSS SNR data, so two different tropospheric corrections are applied, including refraction correction and tropospheric model correction. The result in Chittagong station shows the standard deviation (STD) of differences is 30.4 cm, and the correlation coefficient is 0.97, while the STD of differences is 12.8 cm, and the correlation coefficient is 0.96 in Heping station. The obvious elevation-dependent errors observed in Chittagong station are mainly from tropospheric effects. After applying the refraction correction and tropospheric model correction, the STD in Chittagong station is reduced from 30.4 cm to 28.1 cm and 29.4 cm, respectively. However, the elevation-dependent errors in Heping station is not significant. It may result from that the elevation angle of SNR data is higher or the antenna height is lower, so the tropospheric correction is limited.
Keywords: GNSS-R, SNR, Tidal Harmonic Analysis, Tropospheric Corrections
1 Master Student, Department of Geomatics, National Cheng Kung University.
2 PHD Student, Department of Geomatics, National Cheng Kung University.
3 Professor, Department of Geomatics, National Cheng Kung University.
4 Assistant Professor, National Taiwan Ocean University, Department of Communications, Navigation and Control Engineering.
5 Researcher, Cooperative Research Centre for Spatial Information, Australia.
6 Associate Professor, Department of Real Estate and Built Environment, National Taipei University.
*Corresponding author, TEL:+886-6-2757575 ext. 63826,E-mail: [email protected].
一、前言
地球暖化所導致的全球海水面上升已衍生出許多嚴重的問題,例如:動植物棲 息地消失和海岸線退縮等,甚至是危及沿岸及低窪地區人民的生命財產安全。歐洲 太空總署 (European Space Agency, ESA)指出 1993-2018 年全球海水面上升速率約為 3.2 mm/yr,更值得注意的是在過去五年(2013-2018)來海水面上升速率已增加到 4.8 mm/yr (WCRP Global Sea Level Budget Group, 2018)。因此,了解並持續監測沿岸海 水面變化是全世界極需重視的研究議題。
傳統上,海水面變化主要透過潮位站或衛星測高進行監測。然而,潮位站點位 空間分佈不均、資料不連續、觀測量包含地表垂直變動量,因此無法有效地觀測沿 岸地區和全球的絕對海水面變化。衛星測高反射波形於沿岸地區易受陸地干擾而無 法提供精確的海水面觀測量。
隨著衛星技術的發展,全球導航衛星系統(Global Navigation Satellite System, GNSS)在軍事、經濟以及定位上的應用,使其成為一不可或缺的技術。GNSS 用於 高精度定位或導航等應用時,接收儀的天線會抑制多路徑效應的反射訊號(Vagle et al., 2016),不過,近年來已有許多學者發現,多路徑訊號可用來分析反射面的特性。
Zavorotny & Voronovich (2000)利用 GNSS 雙基雷達站資料推求海面之風速變化,開 啟了 GNSS-R 資料之應用。Larson 等人(2013)使用單顆右旋極化(Right-Hand Circular Polarization, RHCP)天線接收 GNSS 訊噪比(signal-to-noise ratio, SNR)資料,透過 Lomb-Scargle Periodogram (LSP)法計算 SNR 資料震盪主頻率,利用主頻率求得接收 儀天線相位中心至反射面之間的垂直距離(即為反射面高度),進而轉換成海水面高 度。此研究實驗地點分別為瑞典的 Onsala Space Observatory(OSO)站以及美國的 Friday Harbor 站,成果與鄰近潮位站比較顯示,OSO 站之差值均方根誤差(Root Mean Square, RMS)約為 4.8 公分,Friday Harbor 站的差值 RMS 約為 10 公分。Löfgren 等 人(2014)進一步分析全球五個 GNSS 測站資料,此五站具有不同的地理環境及潮差 大小(1.7-7.7 公尺),成果與共站或鄰近潮位站比較之差值 RMS 為 6.2-43.2 公分,相 關係數皆達到 0.9 以上,展現 GNSS-R 技術於監測沿岸海水面變化之潛力。Lee 等 人(2019)利用潮汐調和分析輔助 LSP 法來提高海水面高度計算精度,其成果顯示差 值的標準偏差皆明顯降低,相關係數也提升至 0.95 以上,亦顯示調和分析輔助 LSP 法用於 GNSS-R SNR 觀測海水面之可行性。
為提高 GNSS-R 海水面觀測精度,許多學者也致力於訊號品質以及外在環境因 素誤差改正研究。GNSS 訊號穿過對流層時會造成訊號折射及延遲,在衛星定位及 大地監測應用上是一很大的誤差來源(Tralli et al., 1992)。Santamaría-Gómez 等人 (2015)利用反演都卜勒效應的方法來提升監測海水面的精度,在八個測試區域中,
觀測精度皆有效提升。不過他們也發現,當衛星仰角小於 12°時,GNSS-R 與潮位 站海水面觀測量之間存在著與衛星仰角相關的誤差。因此,Santamaría-Gómez 等人 (2016)利用測站周圍的氣象觀測資料來計算對流層折射所造成的衛星仰角變形量,
並 改 正 初 始 入 射 角 觀 測 值 ; Williams 等 人 (2017) 則 利 用大 氣 射 線追 蹤 法 以 及
VMF/GPT2w 模型來估計對流層延遲量,並針對原始 GNSS-R 求得之反射面高度進 行改正,在 22 個實驗的 GNSS 測站中,發現對流層延遲量誤差與衛星仰角和測站 天線高有關,最大誤差可達公尺等級。
本研究中選取原先非設計於 GNSS-R 應用之孟加拉吉大港站及臺灣和平港 GNSS 站(SNR 資料相對較差),採用調和分析輔助 LSP 法來計算海水面高度,並與 鄰近或共站潮位站比較。此外,本研究亦探討對流層效應對於 GNSS-R 監測海水面 之影響,並分別採用折射改正及 VMF1/GPT2w 對流層模型改正,最後分析改正前 後之結果。
二、研究區域及資料介紹
(一) 研究區域
本研究實驗區域分別為孟加拉吉大港(Chittagong)以及臺灣和平港(Heping)。吉 大港為孟加拉的第二大城市,為重要的交通樞紐及工業中心,因此船隻來往頻繁。
GNSS 站(經緯度見表 1)位於戈爾諾普利河之東岸,而鄰近潮位站位於戈爾諾普利河 之西岸,距離 GNSS 站約為 1.1 公里,相對地理位置如圖 1(左)所示(經緯度見表 2)。
和平港為一個工業專用港,為提供工業區內原物料和成品輸出入的運送而設置,位 於花蓮縣秀林鄉,位置如圖 1(右),其 GNSS 站與潮位站為共站,經緯度見表 1。
圖 1 (左)吉大港 GNSS 站與潮位站之相對地理關係,圖中之河流為戈爾諾普利河;(右) 臺灣和平港站之位置圖。(底圖: Google Earth)
(二)研究資料
本研究使用資料包含 GNSS SNR 資料、潮位站海水面觀測量以及測站周圍之氣 象資料。
1. SNR 資料
因 L2 波段資料對於反射面的資訊較不明顯,較不易求得準確反射面高度,故 本研究僅採用 GPS L1 SNR 訊號進行計算 (Löfgren&Haas, 2014)。實驗採用的 GNSS 站資訊如表 1 所示。
表 1 GNSS 站資訊 站名 經度
(E°)
緯度 (N°)
天線高 (m)
取樣
頻率 資料時間 提供者
吉大港 91.83 22.24 11.2 1 Hz 2015/04/01 -2015/04/30
Institut de Recherche pour le
Développement 和平港 121.76 24.30 7.2 1 Hz 2017/9/01
-2017/9/30 工業技術研究院
2. 潮位站海水面觀測量
為了驗證 GNSS-R 之結果,本研究取得共站或是鄰近潮位站資料來做比較。潮 位站資訊如表 2 所示。吉大港資料由 University of Hawaii Sea Level Center (UHSLC) 所提供,資料時間系統為 UTC 時間;和平港資料由工業技術研究院所提供,時間 系統為 UTC+8。另外,GNSS-R 成果為 GPS 時(GPS Time),GPS 時與 UTC 間有 18 秒偏差量,但本研究 GNSS-R 解採用之時間間隔分別為 15 分鐘(吉大港)及 1 小時(和 平港),故忽略兩時間系統之偏差量。
表 2 潮位站資訊 站名 經度
(E°)
緯度 (N°)
潮差 資料時間 提供者
吉大港 91.83 22.25 5 公尺 2015/04/01-2015/05/31 University of Hawaii Sea Level Center 和平港 121.76 24.30 2 公尺 2017/8/01-2017/12/31 工業技術研究院
3. 氣象資料
進行對流層改正需要測站周圍的氣象資訊,包含大氣壓力和溫度。吉大港站無 法 直 接 取 得 氣 象 資 訊 , 因 此 採 用 歐 洲 中 期 天 氣 預 報 (European Centre for Medium-Range Weather Forecasts,ECMEF)提供的網格資料,空間解析度為 0.125°,
因此須進行內插求得測站位置之大氣壓力及溫度資訊。和平港站之氣象資料由中國 文化大學大氣科學系管理的大氣水文研究資料庫取得。兩 GNSS 站之氣象詳細資訊 如表 3 所示。
表 3 對流層折射改正計算之氣象資料資訊
站名 氣象資訊 資料時間 資料來源
吉大港 大氣壓力(hPa)、
溫度(°C) 2015/04/01-2015/05/31
European Centre for Medium-Range Weather
Forecasts 和平港 大氣壓力(hPa)、
溫度(°C) 2017/9/01-2017/10/31 大氣水文研究資料庫
三、研究方法
(一) GNSS-R
本次研究所採用的 GNSS 接收儀屬於單顆 RHCP 天線。GNSS 接收儀同時接收 來自衛星的直接訊號以及來自海水面的反射訊號,直接訊號與反射訊號間之干涉現 象能清楚地呈現於訊噪比(SNR)資料中。而 SNR 的震盪頻率與天線相位中心至反射 面的垂直距離相關(Larson et al., 2013),此距離稱為反射面高度(Reflector Height),
經過換算可得海水面高度。訊號路徑和距離如圖 2 所示。
圖 2 GNSS-R 應用之示意圖
為取得僅含有反射訊號之 SNR 資料,須由原始 SNR 資料中移除直接訊號。本 研究採用 Larson 等人(2013)所提之方法,利用二階多項式來擬合 SNR 資料後移除擬 合值(直接訊號),此殘差部分即為去除趨勢之訊噪比資訊(de-trended SNR, δ SNR)。
δ SNR 資料與衛星仰角的關係式可用公式(1)表示(Larson et al, 2013):
= + = ( + ) (1) 其中 A 為振幅, 代表相位角,φ代表相位偏移量,h 為反射面至 GNSS 天線相位 中心的垂直距離(亦即反射面高度),λ 是 GNSS 載波波長,ε 是衛星仰角。透過相位 角的變化率來求得訊號的振盪頻率(Larson et al, 2013):
→ ( ) = + (2) 其中ℎ及 為反射面高度及衛星仰角之時間變化率。若假設海水面不隨時間變化(ℎ = 0),則 → ( ) = 。當δ SNR 相對於衛星仰角正弦值的頻率越高,其天線中心 與反射面的距離越大,也就代表海水面的高度越低,反之亦然。
(二) SNR 資料限制
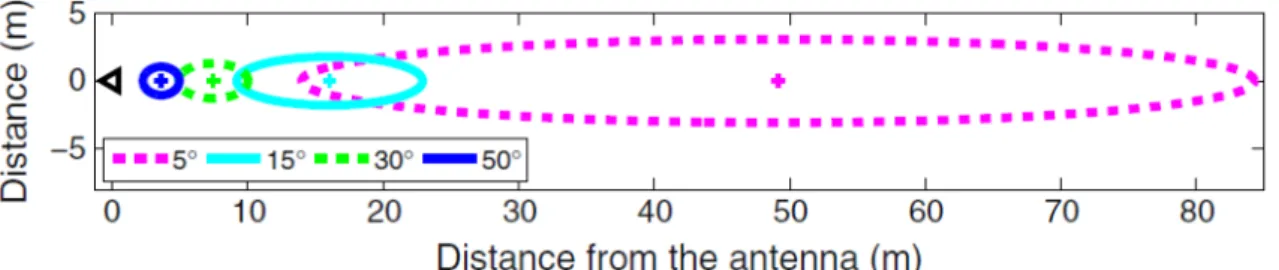
為確定反射訊號來自於海水面,而非其他物體的反射,因此進行衛星訊號的方 位角和仰角約制。本研究利用 Google Earth 觀察測站周圍的環境,判斷衛星訊號是 否來自海水面進行方位角限制。衛星仰角的限制則透過第一費涅爾區(Hannah, 2001) 來判定。圖 3 為不同衛星仰角下之第一費涅爾區範圍,圖中黑色三角形代表測站天 線平面位置,費涅爾區中心符號(+)為衛星訊號之鏡面反射點,縱軸及橫軸為相對於 天線位置之水平距離,因此即可判斷衛星訊號之鏡面反射點及其反射範圍是否完全 來自海水面。
圖 3 不同衛星仰角下之第一費涅爾區。(Löfgren & Haas,2014) (三) 調和分析輔助 Lomb Scargle Periodogram 法
1. Lomb Scargle Periodogram (LSP)
本研究採用 Lomb Scargle Periodogram (LSP)法來計算δ SNR 資料的主要頻率。
Lomb(1976)提出 LSP 法,利用最小二乘頻譜分析法來分析隨機分佈的數據,Scargle (1982)進一步考慮資料的統計性質,給予週期訊號可靠性去計算不同角頻率下的頻 譜強度(Power),即可計算頻率與強度之間的週期圖。圖 4 代表 δ SNR 資料經 LSP 法計算之結果,其中縱軸為不同角頻率下的頻譜強度,橫軸為對應角頻率之反射面 高度。圖中頻譜強度最大值(峰值)為 δ SNR 主頻率,而主頻率可用來求得反射面高 度,進而計算海水面高度。
圖 4 δ SNR 資料經 LSP 法得到之頻譜強度 2. 潮汐調和分析
本研究採用潮汐調和分析有三個不同的目的(Lee et al., 2019),包括:
(1) 潮位站資料的預處理,用來移除粗差。
(2) 利用潮汐調和分析擬合 GNSS-R 海水面,並利用擬合之海水面作為頻譜計 算海水面高之約制條件,以提高海水面高度計算精度。
(3) 利用潮汐調和分析擬合 GNSS-R 海水面後,用來計算公式(2)中之反射面高 度變化率(ℎ)。
在此項研究中,目的(1)部分採用 37 個主要潮汐分潮,而目的(2)和(3),則選用 測站周圍影響較顯著的分潮進行擬合。吉大港站採用 8 個分潮,分別為全日潮(K1、
O1、P1、Q1)及半日潮(M2、S2、N2、K2);而和平港站採用 K1、O1、M2、S2 為 主要分潮進行擬合。
(四) 對流層改正
本研究分別採用折射改正及對流層模型改正。折射改正是針對 SNR 資料之衛 星仰角,透過大氣資料去改正折射造成的仰角誤差;而對流層模型改正則是針對 GNSS-R 計算後之反射面高度,求得對流層延遲造成之反射面高度誤差再進行改 正。
1. 折射改正
衛星訊號因對流層影響造成訊號的傳遞路徑產生折射,使得觀測的衛星仰角與 實際的仰角不同,當衛星仰角較低時,造成的偏差量更為顯著(Anderson,2000)。
對流層折射與大氣溫度和壓力有關,本研究採用的公式如下所示(Bennett,1982):
= ∙ . ( + .
. ) (3) 其中,ε 和 δ ε 為衛星仰角和衛星仰角的改正值,T 為測站氣溫(°C),P 為大氣壓力(hPa)。
因此,本研究會先改正 SNR 資料中相對應之衛星仰角,再利用 LSP 法求得反射面 高度並與未改正前之結果進行比較。
2. 對流層模型改正
就相位在空間中傳遞的距離來看,公式(1)中δ SNR 之相位角可表示為:
= (4) 其中 = ,稱做波數,τ 為幾何延遲量。圖 5(左)顯示反射訊號造成之幾何延遲示 意圖,其關係可由下列公式表示:
= + = 2 ( ) (5) 其中 為反射面高度, 為衛星仰角, 、 為反射訊號傳播之路徑。當考慮對流 層延遲影響時,公式(4)中的 τ 可改寫成 = + ,而 即為對流層延遲量,如 圖 5(右)所示。
圖 5 (左)反射訊號造成延遲示意圖,(右)對流層影響造成延遲示意圖。(修改自 Williams 等人, 2017)
假設直接訊號和反射訊號路徑在與天線中心等高處含有相同之對流層延遲量,
即可互相消除,如圖 5(右)中藍色箭頭處所示。額外的對流層延遲影響就完全來自 於反射訊號所行經之路徑,如圖 5(右)中紅線箭頭處所示。因此,總對流層延遲量 可表示成:
2 (6) 其中 T1、T2和 T 為天線相位中心與反射點之間的對流層延遲量差值,此方法 透過 VMF1 映射函數(Boehm et al., 2006)搭配全球壓力溫度模型 GPT2w(Boehm et al., 2014)來計算總對流層延遲量,再將總對流層延遲量相對於衛星仰角正弦值進行微分,
求得對流層延遲造成之反射面高度誤差並進行改正(Williams et al., 2017)。
四、研究成果
(一) GNSS-R 計算結果
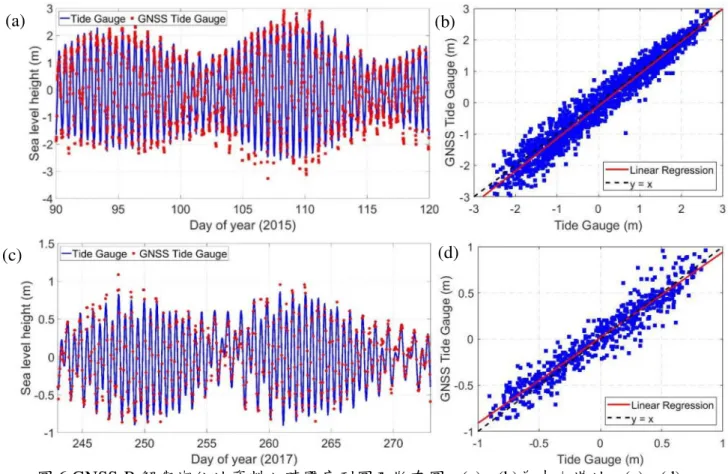
圖 6(a)和 6(c)為吉大港站以及和平港站海水面變化時間序列圖,其中藍線為潮 位站之海水面變化時間序列,紅點為 GNSS-R 解算海水面之結果,因兩時間序列之 參考基準不同,故先移除各自之平均值;圖 6(b)和 6(d)為 GNSS-R 與潮位站之海水 面高度之散佈圖。由圖可知 GNSS-R 結果與潮位站資料相吻合,即使在極值(高低潮),
GNSS-R 成果也展現了良好的監測能力。表 4 為吉大港站及和平港站與潮位站的比 較統計結果,兩者差值標準偏差分別為 30.4 公分(吉大港站)和 12.8 公分(和平港站),
兩資料之相關係數皆達到 0.95 以上。
圖 6 GNSS-R 解與潮位站資料之時間序列圖及散布圖。(a)、(b)為吉大港站,(c)、(d) 為和平港站。
表 4 吉大港及和平港之 GNSS-R 解與潮位站資料比較結果
站名 吉大港站 和平港站
最大差值 1.51 公尺 46.5 公分
平均差值 < 0.0 公分 < 0.0 公分
差值之標準偏差 30.4 公分 12.8 公分
相關係數 0.97 0.96
決定係數 (R-square) 0.95 0.91
(二) 對流層改正
本節利用兩種對流層方法進行改正,比較改正前後之結果並分析。
1. 吉大港站 (1) 折射改正
(c) (d)
(a) (b)
圖 7 為吉大港 GNSS-R 與潮位站之海水面高度差值相對與衛星仰角關係圖。其 中橫軸代表衛星仰角的平均值,縱軸為潮位站觀測量與 GNSS-R 海水面高度的差值。
圖 7(左)可發現,在低角度時(特別是在 2°至 10°之間)有著與衛星仰角相關的顯著誤 差;圖 7(右)為做完折射改正後結果,原本在低角度的誤差已明顯改善,整體的趨 勢也變得比較平緩。表 5 為吉大港折射改正前後的比較結果,差值之標準偏差從 30.4 公分下降至 28.1 公分,相關係數及決定係數也提高,由此可知對流層造成之衛星仰 角相關誤差確實對 GNSS-R 於監測海水面之應用有影響。
圖 7 吉大港 GNSS-R 解與潮位站之海水面高度差值相對於仰角關係圖。縱軸之差值 為 GNSS-R 解減掉潮位站海水面高度,橫軸為每個時間段中衛星仰角的平均值。
(左)未做折射改正之結果與(右)做完折射改正之結果。
(2) 對流層模型改正
圖 8 為吉大港站於不同衛星仰角下對流層延遲量差值變化。圖中藍點代表天線 相位中心與反射點之間距離所造成的延遲量差值,即公式(6)中的 T。由圖中可發現,
隨著衛星仰角越小,兩點間的延遲量差值越大,反之亦然。將延遲量差值轉換成反 射面高度誤差(圖 9)可發現此誤差皆為負值,代表未進行模型改正前觀測之反射面 高度會被高估(亦即海水面高度被低估)。由於計算之反射面高度誤差皆於特定之衛 星仰角範圍內求得,因此我們將平均每 1°內之反射面高度誤差後再改正回反射面高 度上。表 5 為模型改正前後之比較結果。差值標準偏差由 30.4 公分降低為 29.4 公 分,相關係數與 R-square 亦有提升。
圖 8 吉大港站之對流層延遲量差值與衛星仰角關係圖。縱軸 Trop. Delay Difference 為天線相位中心與反射點之間的延遲量差值。
圖 9 吉大港站受對流層延遲影響之反射面高度誤差與衛星仰角關係圖。
表 5 吉大港對流層改正前後 GNSS-R 解與潮位站比較結果
改正前 折射改正後 模型改正後
最大差值 1.51 公尺 1.29 公尺 1.33 公尺 平均差值 < 0.0 公分 < 0.0 公分 < 0.0 公分 差值之標準偏差 30.4 公分 28.1 公分 29.4 公分
相關係數 0.97 0.98 0.98
決定係數 (R-square) 0.95 0.96 0.96
總結以上結果,可以發現約在仰角 10°以下含有明顯的衛星仰角相關誤差,仰 角越低,其誤差值越大,且透過兩種改正方法,皆能提升計算之海水面高度精度,
但提升幅度不大。但從表 5 中發現,在最大差值時有比較明顯的改善,吉大港站之 最大差值為 1.51 公尺,原因為該站潮差較大,而經對流層改正後,最大差值皆下降
約 20 公分。
2. 和平港站 (1) 折射改正
圖 10 為和平港 GNSS-R 與潮位站之海水面高度差值與衛星仰角關係圖。從圖 10(左)可以發現,在和平港站沒有明顯的衛星仰角相關誤差,且就折射改正後的結 果來看,在低角度的改正量亦不明顯。因此,表 6 統計結果顯示,折射改正對於和 平港 GNSS-R 結果影響有限。
圖 10 和平港 GNSS-R 解與潮位站之海水面高度差值與衛星仰角關係圖。縱軸為 GNSS-R 解減掉潮位站海水面高度差值,橫軸為每個時間段中衛星仰角之平 均值。(左)未做折射改正之結果與(右)做完折射改正之結果。
(2) 對流層模型改正
圖 11 為和平港站在不同衛星仰角下對流層延遲量差值變化,圖中可看到延遲 量差值亦隨著衛星仰角越低而變大。圖 12 為對流層影響之反射面高度誤差與衛星 仰角關係圖,圖中亦顯示此誤差皆為負值,且衛星仰角越低,誤差值越大。然而,
表 6 顯示模型改正後結果,其精度亦無明顯改進。
圖 11 和平港站之對流層延遲量差值與衛星仰角關係圖。縱軸 Trop. Delay Difference 為天線中心至反射點之間的延遲量差值。
圖 12 和平港站受對流層延遲影響之反射面高度誤差與衛星仰角關係圖。
表 6 和平港對流層改正前後 GNSS-R 解與潮位站比較結果
改正前 折射改正後 模型改正後
最大差值 46.5 公分 46.3 公分 47.9 公分 平均差值 < 0.0 公分 < 0.0 公分 < 0.0 公分 差值之標準偏差 12.8 公分 13.0 公分 13.1 公分
相關係數 0.96 0.95 0.95
決定係數 (R-square) 0.91 0.91 0.91
對流層延遲量的影響與反射面高度及衛星仰角有密切關係,當衛星仰角越小,
其延遲量越大;當反射面高度越高,其延遲量也越大。由於吉大港站的天線設置較 高(11.2 公尺),且此區域潮差較大(約 5 公尺),而和平港站之天線高和潮差皆比吉大 港站小,見表 1 及表 2,故吉大港站估計之反射面高度相對較大,其對流層延遲影 響亦比和平港站顯著,且從圖 9 及圖 12 亦可看出,吉大港站在對流層延遲造成之 反射面高度誤差最大可達到 1.6 公尺,而和平港站僅 20 公分。最後,從兩測站之對 流層改正結果來看,其改正幅度皆不明顯,因此推測可能有造成 GNSS-R 解誤差的 因素尚未修正,例如海況偏差(Sea State Bias)等。
五、結論
本研究選用之吉大港與和平港 GNSS 站資料,因 GNSS 站原非設計於海水面監 測應用,故 SNR 資料品質相對較差。此外,受限於環境因素而影響訊號接收,例 如吉大港站位於出海口,船隻來往頻繁;而和平港站位於港口內,使反射海面方位 角狹小。但本研究經由調和分析輔助 LSP 法之計算下,求得吉大港站 GNSS-R 與臨 近潮位站觀測量之差值標準偏差為 30.4 公分,相關係數為 0.97;而和平港站之差值 標準偏差為 12.8 公分,相關係數為 0.96。因此,對於先天資料不足之情況下,能達 到此觀測精度,也說明了此技術含有相當大效益。
在吉大港站,GNSS-R 與潮位站海水面高度之差值存在著與衛星仰角相關誤差,
衛星仰角越低,其差值越大。而進行完折射改正以及對流層模型改正後,其差值標 準偏差分別能從 30.4 公分降低至 28.1 公分及 29.4 公分。然而,位於臺灣的和平港 站,其改正效果有限,其主因在於和平港站的衛星仰角相關誤差並不顯著,而在研 究中亦有發現對流層延遲量大小與衛星仰角呈反比,且與估計之反射面高度呈正比。
因此,對於天線高度架設離平均海水面較高的測站(大於 10 公尺)或是採用 SNR 資 料之衛星仰角較低時,其對流層影響程度可能較為顯著。
參考文獻
Anderson, K. D, 2000, Determination of water level and tides using interferometric observations of GPS signals. Journal of Atmosheric Oceanic Technology, 17 (8), pp.
1118–1127.
Bennett, G. G. 1982, The calculation of astronomical refraction in marine navigation.
Journal of Navigation, 35(2), pp. 255–259.
Boehm, J., B. Werl, and H. Schuh, 2006, Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data, Journal of Geophysical Research, 111, pp. 2406-2415.
Böhm, J., G. Möller, M. Schindelegger, G. Pain, and R. Weber, 2014, Development of an improved empirical model for slant delays in the troposphere (GPT2w), GPS Solutions., 19(3), pp. 433–441.
Hannah, B. M, 2001, Modelling and simulation of GPS multipath propagation, Thesis (Ph. D), Queensland University of Technology: Queensland.
Larson, K. M., J. S. Löfgren, and R. Haas, 2013, Coastal sea level measurements using a single geodetic GPS receiver. Advances in Space Research, 51 (8), pp. 1301–1310.
Lee, C. M., C. Y. Kuo, J. Sun, T. P. Tseng, K. H. Chen, W. H. Lan, C. K. Shum, T. Ali, K.
E. Ching, P. Chu, and Y. Jia, 2019, Evaluation and improvement of coastal GNSS reflectometry sea level variations from existing GNSS stations in Taiwan, Advances in Space Research, 63(3), pp. 1280-1288.
Löfgren, J. S., R. Haas, and H. G. Scherneck, 2014, Sea level time series and ocean tide analysis from multipath signals at five GPS sites in different parts of the world.
Journal of Geodynamics, 80, pp. 66-80.
Lomb, N. R, 1976, Least-squares frequency analysis of unequally spaced data.
Astrophysics and space science, 39(2), pp. 447-462.
Scargle, J. D, 1982, Studies in astronomical time series analysis. II-Statistical aspects of spectral analysis of unevenly spaced data. The Astrophysical Journal, 263, pp.
835-853.
Tralli, D. M., S. M. Lichten, and T. A. Herring, 1992, Comparison of Kalman filter estimates of zenith atmospheric path delays using the Global Positioning System and very long baseline interferometry, Radio Science, 27(6), pp. 999–1007.
Vagle, N., A. Broumandan, A. Jafarnia-Jahromi, and G. Lachapelle, 2016, Performance analysis of GNSS multipath mitigation using antenna arrays, The Journal of Global Positioning Systems, 1(14), pp. 1-15.
WCRP Global Sea Level Budget Group: Global sea-level budget 1993–present, Earth System Science Data, 10, pp. 1551-1590.
Williams, S. D. P., and F. G. Nievinski, 2017, Tropospheric delays in ground-based GNSS multipath reflectometry— Experimental evidence from coastal sites, Journal of Geophysical Research. Solid Earth, 122, pp. 2310–2327.
Zavorotny, V. U., and A. G. Voronovich, 2000, Scattering of GPS Signals from the Ocean with Wind Remote Sensing Application, IEEE Transactions on Geoscience and Remote Sensing, 38(2), pp. 951-964.
TAIWAN JOURNAL OF GEOINFORMATICS
第八卷第一期 民國一○九年一月
Vol. 8, No. 1 January 2020
目 錄
CONTENTS
重大地震對臺灣地區 e-GNSS 系統營運因應之研究
陳鶴欽、蕭世民、鍾岳龍、莊峰輔………...………..………....……1 A study on the impact of e-GNSS system in Taiwan and its operation due to
severe earthquakes
He-Chin Chen, Shin-Min Hsiao, Yuen-Lung Jung, Feng-Fu Juang
對流層效應對於 GNSS-R 資料估算海水面高度之影響
洪紹倫、李啓民、郭重言、藍文浩、曾子榜、陳國華...………..………23 Assessing Tropospheric Effects on Retrieving Sea Surface Heights from GNSS-R Data
Shao-Lun Hung , Chi-Ming Lee , Chung-Yen Kuo, Wen-Hau Lan, Tzu-Pang Tsen, Kwo-Hwa Chen

![表 1 e-GNSS 系統歷年坐標系統變動表 時間 臺灣地區 澎湖、金門及馬祖地區 97.5.1 *1 ~98.7.1 e-GPS[2007] TWD97[1997] 98.7.1~103.1.1 e-GPS[2009] 103.1.1~104.4.30 e-GNSS[2013] 104.5.1~106.4.30 e-GNSS[2015] *2 106.5.1~ e-GNSS[2017] 備註: 1](https://thumb-ap.123doks.com/thumbv2/9libinfo/9066805.352663/6.892.162.740.118.466/系統歷年坐標系統變動表時間臺灣地區澎湖金門及馬祖地~TWD~.webp)