運用耦合式方法計算浮式風機在規則波中的運動特性 A Coupled Approach for Evaluating Motion Response
of Floating Offshore Wind Turbine in Linear Waves
陳麒友
1、許育誠
1、范秉天
2、林宗岳
2、趙修武
1*1
國立臺灣大學工程科學及海洋工程學系
2
中國驗船中心研發組
Chi-Yu Chen
1*, Yu-Cheng Hsu
1, Bryan Nelson
2, Tsung-Yueh Lin
2, Shiu-Wu Chau
11
Department of Engineering and Ocean Engineering, National Taiwan University
2
R/D Section, CR Classification Society chausw@ntu.edu.tw
摘要
為了解浮式風機於風浪中的運動性能及功率變化,
本研究以NREL 5MW 風機搭配 OC4 DeepCwind 半潛型 浮式平台為模擬對象。研究方法使用STAR-CCM+求解 雷諾平均納維爾史托克及SST k-ω 紊流模型,模擬風機 運轉的流場與氣動力特性。浮體平台運動採用AQWA 以 邊界元素法求解波浪輻射及繞射速度勢和運動反應。接 著將氣動力產生的縱移力和縱搖力矩分別加入運動方 程式的氣動力阻尼矩陣,三條懸垂繫纜以非線性有限元 素法加以模擬,以求解求解風-波耦合運動。模型風機流 場模擬與氣動力性能計算經參考文獻驗證後,用於計算 浮式風機受6 米波高 10 秒週期的規則波及額定風速中 的風機運動情況,並與NREL 軟體 FAST 於同狀況下的 模擬進行比較。模擬結果顯示,兩者縱移運動振幅均在 1.6 米內、縱搖運動振幅均在 1.4 度內,顯示本方法的正 確性。
關鍵詞:浮式風機、半潛型浮式平台、運動、計算流體 力學、邊界元素法。
Abstract
A NREL 5-MW wind turbine along with OC4 DeepCwind semi-submersible floating platform is adopted to study its motion and power variation under circumstances of winds and waves. The CFD software STAR-CCM+ is employed to solve the Reynolds-averaged Navier-Stokes equation with SST k-ω turbulence model to simulate the flow field and the aerodynamics of an operating wind turbine. The motion of floating platform is evaluated through the boundary element method implemented in the software AQWA. Surging and pitching forces, aerodynamics forces, are added to the aerodynamics damping matrix to describe wind-wave coupling motion. Three catenary mooring lines are simulated in the time domain by a non-linear finite element method. After a verification of the flow field and aerodynamic performance of the target wind turbine, the motion of floating offshore wind turbine is simulated in a regular wave with wave height 4 m and period 10 s. The prediction is then compared with the FAST result with the same condition. The numerical results show that the difference in the amplitudes of surging motion and pitching motion are less than 1.6 m and 1.4 degrees, respectively. It verifies the accuracy of the proposed method.
Keywords: Floating offshore wind turbine, Semi- submersible platform, Motion, CFD, BEM.
I. 前言
離岸風場的水深超過 50 米時,基於成本考量將採 用浮式風機設計。浮式風機由於同時受到氣動力和水動 力的影響,在力學行為上較固定式風機的更為複雜。本 研究目標為考慮計算效率以及準確性,開發一套可以同 時考慮氣動力和水動力影響的浮式風機運動行為預測 方法。本研究參考[1-3]建議的方法,採用基於邊界元素 法的 AQWA 軟體進行水動力特性模擬。風機氣動力特 性則採用基於有限體積法的 STAR-CCM+軟體 [4-5]進 行模擬。本研究的數值耦合方法是基於波浪在頻率域具 有微小線性振幅的假設,將氣動力產生的縱移力和縱搖 力矩分別加入運動方程式的氣動力阻尼矩陣,浮式風機 的三條懸垂繫纜效應則以 AQWA 的內部求解器加以考 慮,最後再將所獲得的風機運動作為 STAR-CCM+風機 模擬的運動條件,以求得風機功率變化。本研究同時使 用NREL 開發的 FAST 軟體模擬相同狀況下的風機運動 與功率特性,以作為本研究提出方法的驗證基礎。
II. 目標風機與分析方法
本研究以NREL 5MW 風機[6]為目標風機,並搭配 OC4 DeepCwind 的半潛式浮體平台[7]作為目標浮式風 機平台。OC4 DeepCwind 半潛式浮體主要尺寸與外形如 圖1與圖2 所示,重量、重心和慣性矩如表 1 所示。
圖1半潛式浮體上視圖[7] 圖 2半潛式浮體上視圖[7]
表1 OC4 DeepCwind 重量、重心和慣性矩 [7]
本研究以雷諾平均納維爾史托克方程式(RANS)描 述風機受氣動力作用之流場,以SST k-ω紊流模型[8]考 慮風機流場紊流效應,以勢流理論方程式描述浮體平台 受到水動力作用的運動情形。本研究使用 STAR-CCM+
雷諾平均納維爾史托克方 程式 ,以及使用商業軟體 AQWA 求解勢流理論方程式。
III. 風機運動與氣動力
本研究的目標風機為NREL 離岸型 5 MW 三葉水平 軸風機,其輪轂中心前沿高度(
𝑧
ℎ𝑢𝑏)為 90 m,轉子掃掠 直徑(D)為 126 m,額定風速及額定功率分別為 11.4 m/s 及5 MW,設計運轉轉速範圍自切入轉速 7 RPM 至額定 轉速12.1 RPM。參考[9]的研究成果,風機計算空間示意 圖如圖 2 所示,風機至入流邊界為 2.5 倍直徑,風機至 後方出口邊界為6 倍直徑,計算空間總長度為 8.5 倍直 徑,計算空間寬度則為6 倍直徑,計算空間高度為 3 倍 直徑。固定坐標系原點位於塔柱底部中心,氣流入流方 向為正x 軸方向,z 軸向上並與塔柱中心軸重合。圖 2 風機計算空間與邊界條件位置示意圖 風機計算空間邊界條件位置如圖 2 所示。入流邊界 (Inlet) 設 定 為 均 勻 入 流 , 邊 界 上 的 流 體 速 度 為 𝐕 = (11.4,0,0)。無滑移壁面(Wall)設定流場速度等於零,即 𝐕 = 0。出口邊界(Outlet)的流量等於入口邊界的流量,以 外插方式推算流體在此邊界上的速度。由風機流場特性 可知風機後方為跡流區,因此風機後方採取網格局部加 密的策略。此外風機運轉時,葉片尖端會生成翼尖渦漩 (tip vortex),因此在葉片頂端區域進行網格局部加密,由 於翼尖渦旋尺寸遠小於跡流區更小,所以本研究在葉片 尖端佈置的網格密度最高。
本研究在採用滑動網格(Sliding Mesh)模擬風機轉 子運動,以圓盤區域網格包覆風機轉子並與外圍網格建 立適當銜接面,以保證銜接面具有流場物理量守恆的特 性。為模擬風機受到水、氣動力負荷在空間運動的周圍
流場,採用重疊網格(Overset Mesh)方法,以球狀外形網 格包覆整支風機,並與最外圍網格建立適當銜接面,如 圖 3 所示。風機表面網格分佈如圖 4所示,總網格數約 為一千一百萬。流場求解時,先以穩態計算結果作為暫 態模擬的起始值,參考[10]的建議,以葉片旋轉 2 度所 需時間,即27.54 ms 作為時間步進:
圖 3 計算空間網格分佈
圖 4 風機表面網格分佈
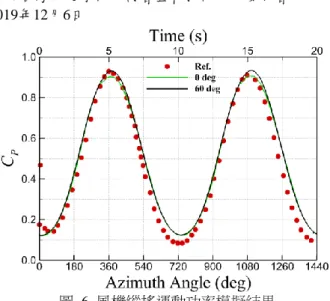
本研究與參考文獻[4-5]的研究結果進行數值驗證,
其中縱移案例中縱移位移為𝑥 = 8sin(0.5𝑡),縱移速度為 𝑉𝑥= 4cos(0.5𝑡) 以 及 縱 搖 案 例 中 縱 搖 角 度 為 𝜃 = 4°sin(2π0.1𝑡),縱搖角速度為𝜔 = 0.0439cos(0.628𝑡)。
本研究縱移模擬結果如圖 5所示,縱搖模擬結果如圖 6 所示。圖中顯示本研究與參考文獻所獲得的功率係數幾 乎相符,顯示本研究計算的正確性。
圖 5 風機縱移運動功率模擬結果
圖 6 風機縱搖運動功率模擬結果
本研究假設六個自由度的運動縱移和縱搖對功率 的影響最大,其他四個方向相對很小可忽略不計,所以 在計算氣動力負荷主要考慮這兩個運動方向。本研究使 用STAR CCM+進行風機縱移和縱搖方向的模擬,縱移 方向的速度為𝑉𝑥 = 4cos(0.5𝑡),縱搖方向的角速度為 𝜔 = 0.0439 cos(0.628𝑡)。為了比較縱移和縱搖運動的功 率特性,將縱搖運動的角速度𝜔換算成轉子中心速度𝑉𝑥, 圖 7 為兩個運動模式氣動力以及氣動力矩與𝑉𝑥的關係,
從圖 7可看出在微小振幅下假設下,兩個運動模式氣動 力以及氣動力矩接近線性關係。因為兩個運動的耦合模 式也近似線性關係,表示這兩個運動的耦合模式負荷是 可以由兩個運動的負荷線性疊加的。在這個線性假設下,
氣 動 力 負 荷 在 頻 域 計 算 中 視 為 額 外 的 興 波 衰 減 力 (Radiation damping),時域計算中則視為常定外力負荷。
圖 7 兩個運動模式氣動力以及氣動力矩與𝑉𝑥的關係
圖 8
圖 8 比較以 AQWA 預測的運動姿態作為 STAR- CCM+模擬的強制運動條件所獲得的縱移和縱搖方向的 氣動力和氣動力矩與AQWA 相對應的力和力矩的差異,
圖 8顯示兩者的結果幾乎相符,說明本研究方法的可行
性與準確性。
IV. 浮體運動 本研究使用以下的浮體運動方程式:
(𝑀 + 𝑚(𝜔))𝑥̈ + 𝐶(𝜔)𝑥̇ + 𝑘(𝜔)𝑥 = 𝐹(𝜔) (1) 其中𝑀為浮體質量,𝑚(𝜔)為浮體的附加質量,𝐶(𝜔)為浮 體的阻尼係數,𝑘(𝜔)為浮體的彈性常數,𝐹(𝜔)為波浪激 振力。流體力可分為水動力(Hydrodynamic)分量和靜水 壓(Hydrostatic) 分量,水動力分量可分解為波浪激振力 (Wave Exciting Force)和輻射力(Radiation Force),其中波 浪激振力又可分解為福祿-克利洛夫力(Froude-Krylov Force)和繞射力(Diffraction Force),輻射力則可分解為附 加慣性力(Added mass)和興波衰減力(Radiation damping)。
該方程式各項對應於不同的流體動力分量,如圖 9所示:
圖 9 浮體運動方程式各項對應的流體動力分量
本研究先以簡單的圓柱(如圖 10),進行頻域求解 及驗證,其大小直徑為10m,長度為 1m,吃水為 0.5m。
驗證方法為檢視運動方程式左式的係數、位移(RAO)以 及右式的波浪激振力,透過位移得到速度和加速度並乘 上係數,驗算等號兩邊是否相同。如圖 11 所示,前三 項為方程式等號左項,第一項為物體的質量加上附加質 量乘上位移,第二項為興波衰減力,第三項為靜水壓造 成的外力,第四項為方程式等號右項的波浪激振力。數 值計算顯示,兩者最大誤差皆在4%以內。
圖 10 圓柱幾何尺寸
圖 11 圓柱運動的數值驗證 V.氣動力耦合
本研究的浮體平台運動採用 AQWA 邊界元素法求 解波浪輻射及繞射問題,獲得流場速度勢與彿體運動反 應。本研究浮體支架採用線性元素,繫纜元件則是採用 非線性元素。線性元素是根據莫里森方程式(Morison Equation):
𝐹 = 𝜌𝐶𝑚𝑉𝑢̇ +1
2𝐶𝑑𝐴𝑢|𝑢| (2) 其中𝐹為作用在物體上的力,𝜌為流體密度,𝐶𝑚為慣性係 數,又𝐶𝑚= 1 + 𝐶𝑎,𝐶𝑎為附加質量,𝑉為物體體積,𝑢̇為 流體加速度,𝐶𝑑為風阻係數,𝐴為參考面積即垂直於流 體速度的切面面積,𝑢為流體速度。因為支架是線性元素,
藉由考慮物體的附加慣性力和興波衰減力,其負荷以頻 域方式計算。繫纜元件為非線性元素,由於不是一次項,
以時域方式計算,直接疊代求解運動方程式。考慮支架 的頻域模擬的波浪和動態壓力分佈如所圖 12 所示,顯 示水面以上無流體壓力作用,驗證了 AQWA 頻域計算 基於微小振幅線性波的假設。
圖 12
首先將氣動力產生的縱移力和縱搖力矩分別加入 運動方程式的氣動力阻尼矩陣,其方法如III.所述。接著 三條懸垂繫纜以非線性有限元素法加以模擬,方法如IV.
所述。然後求解求解浮體的風波耦合運動。計算條件為 波高6 米以及週期 10 秒的規則波、額定風速與額定轉 速,不考慮FAST 建議的風機控制系統,固定轉子的轉 速以及攻角,以確保兩者在相同的物理條件下進行模擬。
圖 13 比較本研究計算結果與美國國家能源局開發的軟 體FAST 的計算結果。兩者模擬時間皆為 1000 秒,為保 證模擬已經到達穩定狀態,圖 14比較最後100 秒的模 擬結果。由圖 13 可看出兩者縱移運動振幅均在 1.6 米 內、縱搖運動振幅均在1.4 度內,相位差約為四分之一 個週期(2.5 秒)。為了消除起始參考時間點的差異,取 圖 14為0~30 秒去除相位差後的計算結果,獲得浮式風 機的運動行為後,作為STAR-CCM+的風機運動條件,
驗證風機功率。由圖 15 可看出兩者功率的相位差約為 四分之一周期,STAR-CCM+預測的功率曲線振幅比 FAST 較大,這是因為以 AQWA 預測的縱移和縱搖振幅 比FAST 稍大的緣故,但兩者振幅均約在 1 MW 內,顯 示本方法的正確性。考慮繫纜系統後的完整計算模型如 圖 16、圖 17 所示,計算空間長寬皆為 1000m,深度則 配合繫纜系統為200m。
圖 13 浮式風機運動特性比較
圖 14 浮式風機運動特性比較
圖 15 浮式風機功率特性比較
圖 16 考慮繫纜系統的完整計算模型
圖 17 考慮繫纜系統的完整計算模型
圖 18 說明在沒有繫纜系統的情況下,因為缺乏抵 抗流體負荷的能力,浮式風機縱移隨著時間增加,此時
縱搖的振幅也相對較大,幾乎為具有繫纜系統的兩倍,
因此可以推論繫纜系統對增加浮式風機的穩度具有相 當的貢獻。圖 19 說明有繫纜系統的情況下,氣動力對 於縱移和縱搖的振幅影響很小。實務上浮式風機會利用 壓艙水使得平均縱搖角度為零,如圖 20 所示,故可推 論在本研究假設的風海況條件下,氣動力對風機的運動 姿態影響很小。從氣動力輸出的功率可看出當浮式風機 運動時,輸出功率會有超過額定功率的現象,但實際上 風機的控制系統會透過調整葉片截距角使功率不超過 額定功率,以避免過載。圖 21 比較考慮與不考慮葉片 控制模式的FAST 計算結果,可以發現轉子輸出的功率 會透過類似濾波的調整,截斷高功率曲線部分,使得發 電機輸出的功率會落在額定功率5MW 以內。如圖 22 所 示,FAST 建議的控制模式調整轉子轉速為諧波形式,
截距角調整使用類似脈波的形式。本研究透過調整截距 角觀察對轉子氣動力的影響,其中包括功率、縱移方向 外力和縱搖方向力矩。然而因為氣動力對浮式平台影響 很小,所以推測考慮控制模式對於風機運動的影響也很 小,由FAST 的計算結果可看出控制系統幾乎不影響浮 式平台的運動,如圖 23 所示。
圖 18 浮式風機縱移、縱搖與時間的關係
圖 19 浮式風機縱移、縱搖與時間的關係
圖 20 浮式風機縱移、縱搖與時間的關係
圖 21 浮式風機功率與時間的關係
圖 22 風機轉子轉速、截距角與時間的關係
圖 23 浮式風機縱移、縱搖與時間的關係 VI. 結論
本研究以 NREL 5MW 風機搭配 OC4 DeepCwind 半 潛型浮式平台為模擬對象,計算浮式風機在6 米波高 10 秒週期的規則波及額定風速條件下的風機運動情況,並 與FAST 於同狀況下的模擬進行比較。從計算結果可得 以下結論:
1. 繫纜系統可增加浮式平台的穩度。
2. 繫纜系統可避免浮式平台隨波浪向下游移動。
3. 對於浮式平台運動,水動力影響的重要性高於氣動 力影響。
4. 轉子控制模式對浮式平台的運動影響可以忽略。
5. 縱移運動振幅約在 1.6 米內。
6. 縱搖運動振幅約在 1.4 度內。
本研究提出的方法,經 FAST 驗證後,具有一定的 可靠性。本研究的氣動力模型使用計算流體力學方法,
較FAST 的葉片元素動量理論氣動力模型更具準確度。
在水動力方面,本研究避免計算流體力學方法的大量計 算時間需求,使用小板法求解水動力行為,平衡了準確 度和計算速度的需求。本研目前忽略轉子氣動力控制模 式,未來將在 STAR-CCM+考慮控制模式,使葉片截距 角以及轉子轉速皆可以隨時間調整,避免瞬時功率超過 額定功率,以及改善耦合方法,以增進準確性。
VII. 誌謝
本論文為科技部計畫成果(科技部補助產學合作研 究計畫-抗颱型浮動風機關鍵技術開發與實海域驗證 (1/2),MOST 108-3116-F-006-004 -CC1)。
參考文獻
[1] Y. Zhang, and B. Kim, “A Fully Coupled Computational Fluid Dynamics Method for Analysis of Semi-Submersible Floating Offshore Wind Turbines Under Wind-Wave Excitation Conditions Based on OC5 Data,” Applied Sciences, vol. 8, no. 11, pp. 2314, 2018.
[2] 李仲凱, 耦合 BEM 與 CFD 方法計算浮體式風機於規則波中運 動之研究. 臺灣大學工程科學及海洋工程學研究所學位論文, 2014: p. 1-108.
[3] 李引棋, 浮體式風力機受風與波浪耦合作用下運動之數值模擬研 究. 臺灣大學工程科學及海洋工程學研究所學位論文, 2013: p. 1- 147.
[4] T. Tran, D. Kim, and J. Song, “Computational fluid dynamic analysis of a floating offshore wind turbine experiencing platform pitching motion,” Energies, vol. 7, no. 8, pp. 5011-5026, 2014.
[5] T. T. Tran, and D.-H. Kim, “A CFD study into the influence of unsteady aerodynamic interference on wind turbine surge motion,” Renewable energy, vol. 90, pp. 204-228, 2016.
[6] J. Jonkman et al., Definition of a 5-MW reference wind turbine for offshore system development, National Renewable Energy Lab.(NREL), Golden, CO (United States), 2009.
[7] Robertson, A., et al., Definition of the semisubmersible floating system for phase II of OC4. 2014, National Renewable Energy Lab.(NREL), Golden, CO (United States).
[8] F. Menter, "Zonal two equation kw turbulence models for aerodynamic flows." p. 2906.
[9] 李文傑, 運轉狀態下風力發電機之氣動力負荷數值研究. 2013.
[10] T. T. Tran, and D. H. Kim, “The aerodynamic interference effects of a floating offshore wind turbine experiencing platform pitching and yawing motions,” Journal of Mechanical Science and Technology, vol.
29, no. 2, pp. 549-561, 2015.