第參章、研究方法與步驟
本研究的方法與步驟分為七個部分:依序為:一、研究對象;二、實 驗時間與地點;三、實驗儀器設備;四、實驗場地佈置;五、實驗說明與 流程;六、資料蒐集與分析處理;七、統計方法。
第一節、研究對象
本研究以十名健康年輕人及十名健康社區老年人為研究對象。受試者 資料如表 3-1。
表 3-1:受試者基本資料表
人數(N) 身高(m) 體重(kg) 年齡(yrs)
老年組 10 1.640±0.05 67.63±8.96 73.5±4.06 年輕組 10 1.725±0.05 68.75±8.89 20.9±1.73
研究對象的募集標準如下:年輕受試者為一般大學生為主,年齡介於 20 至 25 歲之間且無任何系統性疾病;老年受試者為居住於台北市萬隆地區 中且年齡在 65 歲以上,過去一年內可自行獨立行走,不需利用任何輔具或 柺杖。且無任何系統性疾病,如:腦中風、退化性關節炎等會導致肢體功 能異常之病史。
第二節、實驗時間與地點
(一)實驗時間:九十四年三月六日。
(二)實驗地點:國立台灣師範大學分部運動生物力學實驗室。
第三節、實驗儀器與設備
本實驗儀器設備分為資料收集部分、資料處理部份與其他部分。
(一)資料收集部分
1. Redlake 高速攝影機一台。
2. KISTLER 9281 型的測力板一塊(60cm * 40cm),包含一部個人電腦及兩 部放大器。
3. Biovision 肌電系統。
4. 16 頻道的訊號接收器兩個 (肌電與測力板)。
5. A/D 類比-數位訊號轉換器兩個 (肌電與測力板)。
6. 1m * 1m 之平面比例板一塊。
(二)資料處理部份
1. Kwon3D3.1 版影像分析軟體。
2. Redlake CAMARA 影像擷取軟體。
3. Bioware3.0 版分析軟體。
4. DASYLAB6.0 版分析軟體。
(三)其他部分
1. 可調整三種高度之障礙物一座(高度為 5、20 與 35 公分)。
2. 1000W 探照燈兩部。
3. 反光球及反光貼布數個。
4. 電極片數包 (電極材料為 AI/AgCl,其形狀為橢圓形,半徑約為 2 公分)。
5. 酒精、刮鬍刀與棉花。
6. 號碼牌二組。
7. 腳架若干個。
第四節、實驗場地佈置
受試者選擇自我最佳配速之行走步態,並跨越不同高度之障礙物於一 約 6 公尺直線步道,實驗場地配置如圖 3-1 所示。
圖 3-1 場地配置圖
可調整高度之障礙物、
KISTLER 9281 型測力板
Redlake 高速攝影機 與拍攝範圍
Biovision 肌電系統
受試者行走起始點
12 公尺
第五節、實驗說明與流程
(一)動作要求
本實驗要求受試者在約 6 公尺直線步道上,以自我最佳配速之步行速 度,執行跨越不同高度障礙物之步態動作。
(二)障礙物高度選擇
本實驗受試者行走並跨越之障礙物預計為四種高度,即無高度、低障 礙高度(5 公分)、中障礙高度(20 公分)與高障礙高度(35 公分)。這些高度是 根據一般日常生活中常進行的跨越動作,如門檻高度(約 5 公分)、一般階梯 之高度(約 25 公分)乃至於公園外的柵欄高度(約 30-40 公分)。
(三)實驗設計
受試者於六公尺步道上行走並跨越障礙物,可自我選擇步行速度,但 要求受試者在跨越障礙物之前至少行走三步, 且皆由右腳作為跟隨腳 ( trailing limbs )踏測力板,再由左腳作先行腳先跨越過障礙物。每種障礙物 高度必須完成兩次試驗,每位受試者共有八次試驗。基於安全考量上,實 驗前已將行走步道及周圍置有軟墊,以降低跌倒之危險。
(四)實驗流程
1.受試者填寫個人資料表,並告知其實驗流程及研究目的。
2.詳細詢問老年組受試者過去病史,並仔細詢問過去一年內有無跌倒 經驗及其原因,以篩檢出不適進行實驗者。
3.測量每位受試者身高、體重及實際肢段長度等資料,並於各關節處貼上反 光球。
4.簽寫受試者同意書,並告知受試者隨時可退出實驗。
5.在試驗之前,受試者完成熱身且確認充分了解動作要求,並給予三次的練 習。
6.將 1m * 1m 之平面比例板置於跨越區內進行拍攝。
7.受試者於每種障礙物高度必須完成兩次試驗,並平衡次序障礙物高度(抽 籤決定)。
8.依序輪流,每人共行走並跨越障礙物八次(兩次無障礙物高度,六次有障 礙物高度)。
9.受試者於跨越障礙物時,由跟隨腳(後腳)支撐於第一塊測力板,而
先行腳(前腳)跨越障礙物踩在第二塊測力板,之後跟隨腳也跨過障礙物,
繼續向前行走。
10.每次試驗之間給予受試者約 1 分鐘的休息時間,以避免疲勞。
11.最後,再次將 1m * 1m 之平面比例板置於跨越區內進行拍攝。
第六節、資料收集與分析處理
(一)運動學資料處理與分析
本實驗利用一台高速攝影機(速度 60;快門 1/600)進行矢狀面跨越障 礙物動作之影像收集,攝影機約略置於距受試者 12 公尺處,如圖 3-1。本 實驗影片資料使用 Kwon3D3.1 版動作分析系統進行數位化處理,獲得各關 節點原始座標資料;並且以 Butterworth 4th –order Zero Lag Digital 程式 (cutoff frequency:4Hz),對原始資料進行修勻,最後獲得所要的運動學參 數資料。
(二)動力學資料處理與分析
本實驗利用一塊 KISTLER 9281 型測力板(60cm * 40cm)收集跨越障礙 物時,支撐腳之地面反作用力,訊號擷取頻率定為 1200Hz,訊號收集的長 度定為 12 秒。由測力板所測得的資料,將使用 Bioware3.0 版體進行 Low – Pass 的濾波,截止頻率為 300Hz。資料濾波後,進行各項動力學資料的運 算。
(三)肌電訊號之收集
以 Biovision 肌電系統(1200Hz)收集受試者行走到跨越障礙物過
程,紀錄跟隨腳(trailing limbs)之股直肌、股二頭肌、脛骨前肌及腓腸肌等 四條腿部肌群之表面肌電訊號,各肌群電極片所黏貼的位置,如表 3-2 所 示。所獲得資料以 DASYLAB6.0 版分析軟體將實驗所得的肌電訊號,依序 經過 Band –Pass (5~400Hz)、全波整流(Full Wave)、10Hz 的低通濾波 (Low–Pass),以及積分運算的程序,最後獲得積分肌電訊號(IEMG)。關於
肌電訊號標準化的方法是取整個跨越過程中最大值為基準(100%),再將各 期間所獲得之積分肌電除以基準值(100%),作為標準化肌電信號。
本實驗藉由測力板啟動同步訊號,驅動 Redlake Camera,而同步訊號 由 Biovision 系統紀錄。
表 3-2:表面肌電電極片黏貼位置
檢測肌群名稱 電極片黏貼位置
股直肌(RF) 大腿前側,髕骨上緣與髁骨上棘連線之中點處,如圖 3-2。
股二頭肌(BF) 大腿後側,坐骨粗隆與腓骨頭連線之中點處,如圖 3-3。
脛骨前肌(TA) 小腿前側,髕骨下與跟股由上而下三分之一處。兩電極片間距 2 公 分,黏貼方向與肌纖維方向平行,如圖 3-4。
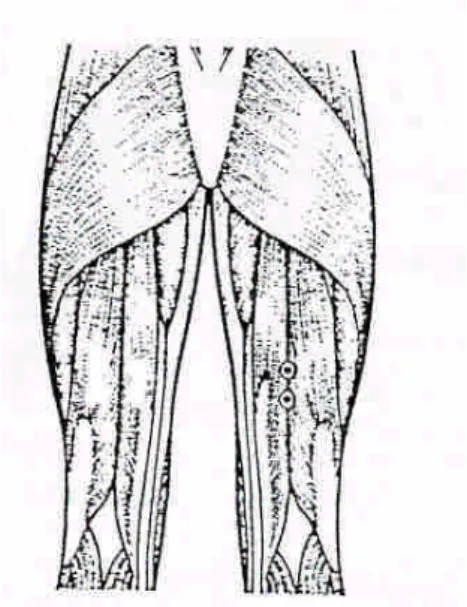
腓腸肌(GAS) 小腿後上方之肌群。電極片置於腓骨與跟骨兩端點間約三分之一 處,兩電極片分別置於兩肌腹上,且黏貼方向與肌纖維方向垂直,
如圖 3-5。
圖 3-2 股直肌表面電極片 黏貼位置圖
( Cram , Kasman ,
& Holtz , 1998 )
圖 3-3 股二頭肌表面電極片 黏貼位置圖
( Cram , Kasman ,
& Holtz , 1998 )
圖 3-4 脛骨前肌表面電極片 黏貼位置圖
( Cram , Kasman ,
& Holtz , 1998 )
圖 3-5 腓腸肌表面電極片 黏貼位置圖
( Cram , Kasman ,
& Holtz , 1998 )
第七節、統計分析
實驗中所收集之資料皆採用混合設計二因子變異數分析( two way ANOVA )之統計方法,考驗年齡(獨立樣本)與不同障礙物高度(重複量數),
之各項參數差異顯著性,統計水準定為α = .05,當達到顯著水準時,再利 用最小平方差異法( LSD )進行事後比較,並且利用皮爾遜積差相關方式針 對跟隨腳支撐期衝量與不同高度跨越步態之步幅長度做相關比較。