行政院國家科學委員會專題研究計畫 成果報告
子計畫二:具遠端監控與故障偵測功能之太陽光能發電系統 之研製(3/3)
計畫類別: 整合型計畫
計畫編號: NSC93-2213-E-011-010-
執行期間: 93 年 08 月 01 日至 94 年 07 月 31 日 執行單位: 國立臺灣科技大學電機工程系
計畫主持人: 王文智
計畫參與人員: 劉育軒、黃昱智、趙震邦
報告類型: 完整報告
處理方式: 本計畫可公開查詢
中 華 民 國 94 年 7 月 25 日
i
摘 要
本研究設計與實現一套以數位信號處理器為基礎之太陽光能發電系統,此系 統具有遠端監控與故障偵測之功能,基本上,本系統係由太陽能電池、充電器、
電池組、直流截波器、換流器、數位信號處理器及通訊介面所組成。其中,我們 依據梯度法及模糊控制法則設計一新型之最大功率追蹤法,使得太陽能電池模組 可持續地輸出最大功率,太陽能電池的輸出功率被用來對蓄電池充電及供給換流 器所需的直流匯流排電壓。同時,我們使用均勻充電器來對串聯電池組充電以延 長蓄電池壽命,在換流器的調變方法方面,我們使用電壓空間向量調變法以減少 電流諧波,並且可使換流器的直流匯流排電壓有效地被利用;同時,我們亦利用 換流器之輸出電流來偵測換流器之故障狀態,並經由通訊介面傳送至遠端監控系 統;而且,利用電壓源換流器,可使太陽能電池所產生的電能直接與市電並聯供 電,而解決夏季尖峰電力不足的問題;另外。通訊介面係由 RS-232C 組成,以執 行數位信號處理器與監控系統之通訊;同時,本系統亦包含適當之人機介面,以 執行遠端監控之功能。
最後,我們使用數位信號處理器及個人電腦設計與實現此一具有遠端監控與 故障偵測功能之太陽光能發電系統,以達成低成本、易維修、易擴充及高可靠度 之特性。
關鍵詞:太陽光能發電系統、遠端監控、故障偵測、模糊控制、最大功率追蹤法。
ii
Abstract
In this project, the design and implementation of a DSP-based photovoltaic energy generation system with remote control and fault detection is studied. This system is composed of the photovoltaic modules, batteries, DC chopper, voltage source inverter, digital signal processor and communication interface. The combination of the gradient method and fuzzy logic is used to design a novel maximum power point tracking technique so that the maximum output power of the photovoltaic modules can be extracted effectively. The output power of the photovoltaic modules is used as the input DC bus voltage of the battery charger and the voltage source inverter. The charge equalization technique for series connected battery strings is adopted to charge the batteries. The voltage vector control method is used as the modulation algorithm of the inverter such that the current harmonics can be minimized and the DC bus voltage can be effectively utilized. Meantime, the output current of the inverter is the basis of the fault detection. The status of the inverter is transmitted to the remote control terminal through the RS-232C and Internet. Utilizing the voltage source inverter, the grid-connected photovoltaic generation system becomes possible in the world.
Therefore, it can help to reduce the summer peak power supplied from the utility equipment. The friendly human interface is also designed to facilitate the remote control function in this system.
Finally, the combination of the digital signal processor and Personal Computer is used as the controller of the photovoltaic energy generation system with remote control and fault detection. The experimental results show that good performance can be obtained in this project. Due to its structure simplicity, the characteristics of low-cost, easy to maintain and expand, and high reliability will be achieved.
Keywords: photovoltaic energy generation system, remote control, fault detection, fuzzy
logic, maximum power point tracking.
iii
目 錄
中文摘要 --- i
英文摘要 --- ii
目 錄 --- iii
第一章 緒論 --- 1
1. 1 研究動機 --- 1
1. 2 相關文獻之回顧 --- 2
1. 3 研究目的 --- 3
第二章 太陽能電池及最大功率追蹤法 --- 5
2. 1 前言 --- 5
2. 2 太陽能電池 --- 5
2. 2. 1 太陽能電池的基本原理與構造 --- 5
2. 2. 2 太陽能電池的電氣特性 --- 9
2. 3 最大功率追蹤法 --- 16
2. 3. 1 擾動觀察法 --- 17
2. 3. 2 基於梯度法之最大功率追蹤法 --- 18
2. 3. 3 基於模糊控制法則之最大功率追蹤法 --- 23
第三章 電壓空間向量調變 --- 27
3. 1 前言 --- 27
3. 2 電壓空間向量調變法則 --- 27
第四章 換流器故障偵測 --- 41
4. 1 前言 --- 41
4. 2 換流器故障偵測方法 --- 41
4. 3 換流器故障偵測模擬結果 --- 48
第五章 三相市電網路並聯 --- 61
5. 1 前言 --- 61
iv
5. 2 三相市電網路並聯流程 --- 61
5. 2. 1 三相市電電壓同步 --- 62
5. 2. 2 三相市電電壓零點偵測 --- 63
5. 2. 3 三相低通濾波器 --- 64
5. 2. 4 三相市電網路並聯模擬結果 --- 65
第六章 串聯電池組之均勻充電器 --- 71
6. 1 前言 --- 71
6. 2 蓄電池 --- 71
6. 3 均勻充電器 --- 73
第七章 遠端監控系統之設計 --- 80
7. 1 LabVIEW 的簡介 --- 80
7. 2 通訊網路界面與 LabVIEW --- 84
7. 2. 1 串列埠通訊界面 --- 84
7. 2. 2 TCP/IP 之通訊協定 --- 85
7. 3 監控系統之工作原理 --- 94
7. 4 建立監控系統方塊圖 --- 95
7. 5 設計步驟 --- 97
7. 6 系統功能及人機界面操作 --- 99
第八章 實驗結果與討論 --- 104
8. 1 前言 --- 104
8. 2 硬體結構 --- 105
8. 2. 1 太陽能電池板 --- 105
8. 2. 2 數位信號處理器 TMS320C240 --- 107
8. 2. 3 電力電路 --- 108
8. 2. 4 功率晶體驅動電路 --- 111
8. 2. 5 電壓和電流感測電路 --- 112
8. 3 程式流程 --- 113
8. 3. 1 一般負載時程式規劃 --- 115
v
8. 3. 2 市電並聯時的程式規劃 --- 118
8. 4 實驗結果 --- 119
8. 4. 1 太陽能最大功率追蹤實驗結果 --- 120
8. 4. 2 換流器故障偵測實驗結果 --- 126
8. 4. 3 市電網路並聯實驗結果 --- 137
8. 4. 4 均勻充電器實驗結果 --- 142
8. 4. 5 遠端監控實驗結果 --- 144
8. 5 討論 --- 147
第九章 結論與建議 --- 150
9. 1 結論 --- 150
9. 2 建議 --- 151
參考文獻 --- 152
計畫成果自評 --- 156
可供推廣之研發成果資料表 --- 157
第一章 緒 論
1.1 研究動機
太陽光能是一種安全無污染的再生能源,且具有相當大的開發潛力,所以近 年來歐美日等地均有相當多的太陽光能發電廠設備啟用。以往太陽能電池發電由 於發電成本過高以致於無法被大量使用,但隨著能源與環保需求帶動技術,並加 上政府政策配合而促使太陽光能發電的成本持續下降,太陽能電池發電因此日趨 符合經濟效益。太陽能電池發電在日照量充沛的季節可以使成本大幅降低,所以 若將太陽能電池發電應用於我國夏季尖峰用電時期,不僅可降低市電限電及停電 的時間,也可使太陽能發電系統更為普及。
在 1993 年第七屆國際太陽光電科學與工程會議(PVSEC, International Photovoltaic Science and Engineering Conference)中之“Residence New Ready"討 論結果為太陽能電池應用於建築上最具發展潛力。英、美、日、加等先進國家自 1990 年起相繼提出「綠建築」等環保理念,期望能減緩建築物對地球環境所造成 的能源負荷與破壞。在亞洲地區,繼新加坡、日本之後,我國也已於 1995 年起正 式將「建築物節能規範」納入建築法規(即綠建築憲法) ,因開發環保發電屋為未 來建築物新趨勢,因此太陽能電池皆朝與建築物結合發展,例如太陽能電池屋頂、
遮陽(雨)棚、窗、牆壁等,開發太陽能電池屋之製造技術以促進新能源與環保 民生實用化。
本研究針對台灣夏季冷氣及冰箱用電量大增,造成限電和停電之問題而發展
一套可利用太陽能電池之能量推動三相交流感應馬達,且可將多餘之電能送往市
電 網 路 之 系 統 。 系 統 之 架 構 核 心 採 用 德 州 儀 器 生 產 的 數 位 信 號 處 理 器
TMS320C240,並利用其特有之組合語言完成最大功率追器之控制法則、三相換
流器之調變法則、蓄電池之充放電控制及市電網路並聯之控制。本研究亦對系統
輸出最重要部份之三相換流器設計一套換流器的故障偵測方法,以避免三相換流
器故障時,系統會有損壞之情況發生。
1.2 相關文獻之回顧
太陽能電池在近幾年來由於成本下降,使得太陽能發電越來越受重視,所以 許多學者便投身於太陽能發電系統開發與應用的行列,以下謹對相關之文獻做一 說明:
在太陽能電池之最大功率追蹤法則上,Singer 等人 [1]利用增量電導法
(Incremental and Conductance method)追蹤太陽能電池的最大功率輸出點,其優 點是當太陽光照量變動時,其輸出端電壓能以平穩的方式追隨其變化。Harashima 等人 [2]提出擾動觀察法(Perturbation and Observation method) ,其使用的類比/
數位轉換器(A/D Converter)較少,可大量降低硬體成本,且具有控制迴路簡單 的優點,因此廣受大家使用。
在太陽能發電系統之應用方面亦有相當多的文獻,如 Hirachi [3]等人完成了 以太陽能系統為基礎之不斷電系統(UPS) ,這套系統不僅可用太陽能電池之電力 對蓄電池充電,在日照量低時亦可利用市電對蓄電池充電。最後並以實驗結果証 實這套系統之可行性。Tanaka 等人 [4]以太陽能系統為架構完成了兩種型式的太 陽能空調系統,一種為單方向性系統(Unidirectional System) ,可由太陽能或市電 推動空調機;另一種為雙向性系統(Bidirectional System),除了具有單方向性系 統之特性之外,還可將太陽能電池的多餘能量送往市電網路。最後並詳盡的分析 各個季節時這兩種系統的節省能源程度。
在充電器方面,當數個蓄電池串聯充電時蓄電池的壽命將與所串聯之蓄電池 數量成指數性關係減少 [5],因此 Kutkut 等人 [5,6]便提出了均勻充電器的觀念:
當數個串聯的蓄電池充電時由於充電速度不同,將導致一部份的蓄電池先完成充 電,若持續對飽和之蓄電池充電將會使蓄電池電壓超過排氣電壓(Gassing Voltage)
值,造成蓄電池壽命減短。利用電力 電子技術中的返馳式轉換器(Flyback Converter) ,將其多組輸出分別接到各個蓄電池的兩端,可以使各個蓄電池之充電 電壓相同,而達到均勻充電的目的。
電力電子電路分析技巧方面,Middlebrook 等人 [7]在 1981 年提出利用狀態
空間平均法(State Space Averaging Method),解決了無法利用電腦分析脈寬調變 電路的困難,然而狀態空間平均法只適用於元件較少的電路上,因此 Czarkowski 等 人 [8] 針 對 此 一 問 題 , 提 出 了 利 用 能 量 守 恆 定 理 ( Principle of Energy Conservation)來分析脈寬調變電路,此方法不僅可使用在元件數量較多的電路 上,亦可分析包含有寄生電阻(Parasitic resistance)之電路。
在換流器部份 Broeck 等人 [9]針對空間向量調變法則行分析,並與一般的正 弦波的波寬調變方式(Sinusoidal PWM)進行比較,發現空間向量調變法的電流 諧波(Current Harmonic)較一般的正弦波的波寬調變方式小,若以馬達為負載時,
由於電流失真較小,故損失較小,其轉矩脈動亦較小。
Peuget 等人 [10]利用電流回授的方式,將三相電流轉換到靜止座標軸,並依 據換流器故障時靜止座標軸上 d 軸及 q 軸的合成電流向量軌跡斜率來判斷換流器 中的功率晶體是否有發生故障,並對於感應馬達在無負載及有負載的情況下,換 流器發生故障後應該如何保護系統做了詳細的分析。
1.3 研究目的
本計畫之目的是設計與實現一套以數位信號處理器為基礎之太陽光能發電系 統,此系統具有遠端監控與故障偵測之功能,基本上,本系統係由太陽能電池、
充電器、電池組、直流截波器、換流器、數位信號處理器及通訊介面所組成。其
中,我們依據梯度法及模糊控制法則設計一新型之最大功率追蹤法,使得太陽能
電池模組可持續地輸出最大功率,太陽能電池的輸出功率被用來對蓄電池充電及
供給換流器所需的直流匯流排電壓。同時,我們使用均勻充電器來對串聯電池組
充電以延長蓄電池壽命,在換流器的調變方法方面,我們使用電壓空間向量調變
法以減少電流諧波,並且可使換流器的直流匯流排電壓有效地被利用;同時,我
們亦利用換流器之輸出電流來偵測換流器之故障狀態,並經由通訊介面傳送至遠
端監控系統;而且,利用電壓源換流器,可使太陽能電池所產生的電能直接與市
電並聯供電,而解決夏季尖峰電力不足的問題;另外。通訊介面係由 RS-232C 組
成,以執行數位信號處理器與監控系統之通訊;同時,本系統亦包含適當之人機
介面,以執行遠端監控之功能。
最後,我們使用數位信號處理器及個人電腦設計與實現此一具有遠端監控與
故障偵測功能之太陽光能發電系統,以達成低成本、易維修、易擴充及高可靠度
之特性。
第二章 太陽能電池及最大功率追蹤法
2.1 前言
在各種傳統能源逐漸枯竭的今日,發展新興的替代能源已是須臾不可緩的事 了,太陽能具有低污染及運作成本低的優點,因此很快地便成為日本與歐洲工業 界所青睞的新興能源。然而太陽能電池的成本高、效率低卻成為它發展的重大瓶 頸,因此如何在單位面積之內使太陽能電池發揮最大的發電量便成為太陽能發電 工業的一大研究重點。在本研究中謹提出一新型、簡單的最大功率追蹤法來改善 傳統擾動觀察法無法精確地工作在最大功率點上的缺點。
2.2 太陽能電池
本節先將太陽能電池的基本原理、構造及電氣特性做一簡單的介紹,作為後 續發展之基礎。
2.2.1 太陽能電池的基本原理與構造
太陽能電池的基本特性和二極體類似,可用簡單的 pn 接面二極體來說明,圖 2.1 為一理想的 pn 接面二極體電流-電壓特性圖,其所對應的方程式如下所示:
⎥ ⎦
⎢ ⎤
⎣
⎡ ⎟⎟ −
⎠
⎜⎜ ⎞
⎝
= exp ⎛ 1 kT I qV
I pn o pn (2.1)
其中,
, :pn 接面二極體之電流及電壓 I pn V pn
k :波茲曼常數 ( Boltzmann constant, 8 63 10 . × − 5 eV / K ) q :電子電荷量 ( 1 . 602 × 10 − 19 庫侖)
T :絕對溫度(凱氏溫度=華氏溫度+273 度)
太陽能電池將光能轉換為電能是依賴自然光中的量子--光子 ( photons ),而每
個光子所攜帶的能量為 E ph :
λ hc λ
E ph ( ) = (2.2)
其中,
h :普郎克常數 ( Planck constant, 414 10 . × − 15 eV S ) ⋅ c :光速
λ :光子波長
圖 2.1 pn 接面二極體電流─電壓特性圖
但並非所有光子都能順利地藉由太陽能電池將光能轉為電能,因為在不同光 譜中光子所攜帶的能量不一樣,就如同 pn 接面二極體當外加能量大於能隙( band gap ) 時電子由價電帶 ( Valence band ) 躍遷至導電帶 ( conduction band ) 而產生 電流,所以當光子所攜帶的能量若大於能隙便可以藉由光電池轉為電能 ( 圖 2.2 ),若光子所攜帶的能量小於能隙時,對太陽能電池而言並沒有什麼作用。在 太陽光照射太陽電池而產生電子 -電洞對的同時也有部份的能量以熱能的形式散 逸而不能被有效的利用。
太陽能電池的種類可分為堆積型 ( bulk type ) 太陽能電池和薄膜型 ( thin film type ) 太陽能電池兩類。堆積型太陽能電池又可分為:
• 單結晶矽太陽能電池。
• 多結晶矽太陽能電池。
• III-V 族化合物半導體太陽能電池。
薄膜型太陽能電池又可分為:
• 非晶矽(amorphous Si)薄膜型太陽能電池。
• 硒化銅銦( CuInSe 2 )薄膜型太陽能電池。
• 鍗化鎘(CdTe)薄膜型太陽能電池。
E
g熱
熱
導 電 帶 Conductuion
band
價 電 帶 Valence
band
光 照 射 電 子
圖 2.2 太陽光照射太陽能電池而產生電子─電洞對圖
就堆積型太陽能電池而言,單結晶矽太陽能電池模組化後效率已高達 14%以 上,目前單結晶矽太陽能電池的開發是朝著低成本和效率的再提高兩方面著手。
單結晶矽太陽能電池現階段的發展是以鑄造矽 ( cast Si ) 為主要材料,而鑄造矽 太陽能電池 的單元 ( cell ) 轉換效率已高達 17.2%,同時也邁入量產期。目 前世界上效率最高的單結晶矽太陽能電池是由澳洲的 Mr. Green 所發展出來的,
此種結構的單結晶矽太陽能電池其面積 可得到轉換效率高達 23.4%。而多結 晶矽太陽能電池上在工業運用上目前已達到 的單元轉換效率為 15.8%
( Sharp 公 司 ) , 在 實 驗 室 中 也 能 作 到 面 積 的 單 元 轉 換 效 率 為 17.8%
( UNSW ),多結晶矽太陽能電池在商業運用上約為 12-14% [11,12]。故由效率和 模組化的觀點,我們不難發現為什麼目前單結晶矽太陽能電池較多結晶矽太陽能 電池常被採用的原因。
10cm 2
4cm 2
100cm 2
4cm 2
另一種堆積型太陽能電池,III-V 族化合物半導體太陽能電池,此種太陽能電
池也可以得到 30-40%的超高效率,這種太陽能電池的第二代其較小面積,但擁有 超高效率的特性已在實驗室獲得證實,如磷化鎵銦 ( GaInP ) /砷化鎵 ( GaAs ) 已 可得到接近 30%的高轉換效率,我們知道使用聚光的方法可使太陽能電池轉換的 效率再向上提升,如砷化鎵 ( GaAs ) /錫化鎵 ( GaSn )疊層太陽能電池在聚光下轉 換效率可高達 35.8%,這也是目前世界上所得到最高轉換效率的太陽能電池 [11]。
薄膜型太陽能電池由於使用較少的材料,在每一模組的成本比起堆積型太陽 能電池有明顯的降低,在製造程序上所須的能量也較堆積型太陽能電池來的小,
它同時也擁有整合型連接模組,如此便省下了獨立模組所須在固定和內部連接的 成本,而未來薄膜型太陽能電池將可能取代現今一般矽太陽能電池成為市場的主 流。
非晶矽 ( amorphous Si ) 薄膜型太陽能電池其結構不同於一般矽太陽能電 池,如圖 2.3 所示,
玻璃基座(Glass substrate)
純質(intrinsic) 純質(intrinsic)
金屬接觸(back contact) 透明傳導膜
p
+p
+n
n
圖 2.3 非晶矽薄膜型太陽電池之結構圖
非晶矽薄膜型太陽能電池主要可分為三層,上層為非常薄 ( 約 0.008 微米 ) 且具有高摻雜濃度的 P ,中間一層則是較厚的 ( 0.5-1 微米 ) 的純質層 ( Intrinsic + layer ) , 但純質層一般通常不會是完全的純質 ( intrinsic ) , 而是摻雜濃度較低的 n 型材料,最下面一層則是較薄的 ( 0.02 微米 ) n,這種 p + − − n i 的結構較傳統 p − 結構有較大的電場,在效率及性能上也有相當大的改善。在 n 上一層薄的 氧化物膜為透明導電膜 TCO ( transparent conducting oxide ),它是為防止太陽光反
P +
射以有效吸收陽光,通常是使用二氧化矽 ( SnO 2 )。
在幾種薄膜型的太陽能電池中較值得一提的是硒化銅銦 ( ) 薄膜型 太陽能電池,硒化銅銦 ( ) 薄膜型太陽能電池有非晶矽薄膜型太陽能電 池所不能達到的高效率和高可靠度,就效率而言,硒化銅銦薄膜型太陽能電池在 小面積上已經可以達到 16%以上,且沒有可靠度方面的問題,但由於其量產技術 尚未成熟,特別在大面積基板上形成的場合中,各元素比例的均一性和再現性等 問題都是今後發展研究的課題 [12-15]。
CuInSe 2 CuInSe 2
2.2.2 太陽能電池的電氣特性
太陽能電池的等效電路可用圖 2.4 來近似,電路中包含有等效線路串聯電阻
(series resistance)、與日照量有關的電流源及二極體,由圖 2.4 中可看出電流源 所產生的電流有一部份會在太陽能電池中的二極體消耗掉,因此太陽能電池端電 流可用式(2.3)表示:
⎥ ⎦
⎢ ⎤
⎣
⎡ ⎟⎟ −
⎠
⎜⎜ ⎞
⎝
⎛ +
−
= ( ) 1
exp mkT R I V I q
I
I pv l pvo pv l s (2.3)
:太陽能電池的端電流 I pv
:太陽能電池的端電壓 V pv
:太陽能電池在無日照下之反向飽和電流 I pvo
:太陽能電池產生的內部電流 I l
:等效串聯電阻 R s
:實驗上非理想常數,通常接近於 1 m
式 (2.3)中的 和 的大小值,和太陽能電池的整個結構相當有關,例如:
太陽能電池的幾何形狀、製造程序都是影響的因素。在 -V 特性曲線圖中,
有幾點是要特別注意的,在短路情況下(V =0) ,這時所有產生的電流都流向外 加的短路負載而不會經過二極體,這時短路電流 幾乎等於光照下所產生的電流
I l I PVo
I PV PV
PV
I
scI l ;當處於開路情況時 ( =0) ,光照下所產生的電流完全流經二極體,此時 開路電壓
I PV V
oc為
⎟⎟ ⎠
⎜⎜ ⎞
⎝
⎛ +
= ln 1
PVo
oc I
I q
V mkT l (2.4)
I
PVV
PVI
lI
DV l
R s
I
PVV
PVI
lI
DV l
R s
圖 2.4 太陽能電池等效電路圖
利用式(2.3)可畫出太陽能電池的 I pv − V pv 特性曲線如圖 2.5 所示,而在特 性曲線中所能畫出的最大矩形面積則是 與 的最大乘積值稱為最大功率點
,如何使太陽能電池工作在此點便是我們所要研究和實作的目標。
I pv V pv P
max圖 2.5 太陽能電池 I
pv− V
pv特性曲線和最大功率點圖
本研究所使用的太陽能電池板為 SOLAREX 公司所生產的 MSX-60 太陽能電 池,其規格如下 [16,17]:
短路電流 ( I sc ):3.8 A 開路電壓 ( V oc ):21.1 V 最大功率點電流:3.5 A 最大功率點電壓:17.1 V 最大功率輸出:60-58W
短路電流的溫度係數:-0.38 mA / ° C 開路電壓的溫度係數:-73 mV / ° C
NOCT ( Normal Operating Cell Temperature ):49 ° C 長寬規格為:110.78 cm* 46.68 cm
以上規格及特性的量測均為單一模組輸出端直接測量得到,不包括各裝置如二極 體、電纜線等的影響,在測量環境上採用標準測試條件 ( Standard Test Condition,
STC ),日照量為 1 kw / m 2 ( 1 sun ) 在 AM1.5 ( air mass 1.5 ),且電池溫度為 25 ° C 時的情況。我們通常定義在一乾淨無污染的環境下,且太陽位於天頂時為 AM 1,
而 AM x 約略近似為1 / cos θ z ,其中 θ z 為日光和天頂所夾的角度,其關係如圖 2.6。
海平面 AM 1
θ
zAM 1 / cos θ
z海平面 AM 1
θ
zAM 1 / cos θ
z圖 2.6 Air Mass 的定義圖
通常一般太陽能電池在使用時,其內部溫度往往遠高於周圍環境溫度,因此 NOCT
( Normal Operating Cell Temperature ) 便成為太陽能電池一個很重要的指標參 數,其標準測試環境條件如下 [11]:
日照量:0.8 kW / m 2 AM1.5 周圍環境溫度:20 ° C
平均風速:大於 1 m/s
有了 NOCT 這規格參數,便可根據式 (2.6)來決定太陽能電池溫度 ( solar cell temperature, T c )。
NOCT G T
T c a *
8 . 0
− 20
=
− (2.5)
:太陽能電池溫度 ( solar cell temperature ) T c
:周圍環境溫度 T a
G :為日照量 ( kW / m 2 )
以下所有有關太陽能電池電器特性的探討均採用 SOLAREX 公司所生產的 MSX-60 太陽能電池板之規格來作說明。
由式(2.3)和等效電路可知溫度和日照量是影響太陽能電池輸出功率的最重 要的兩個參數,此外,太陽能電池的串聯電阻 所產生的歐姆損失(Ohmic Loss)
亦會對輸出功率產生影響。根據太陽能電池的特性及式(2.3)可知,溫度上升會 使得太陽能電池的開路電壓下降,而本研究所使用之太陽能電池的開路電壓溫度 係數為 ,因此可利用式 (2.3)模擬出在各種溫度下的 、
關係曲線圖,如圖 2.7 和圖 2.8 所示。由圖 2.7 中可看到溫度與太陽能電池端電壓 成反比,從圖 2.8 中可知道溫度上升會造成太陽能電池的輸出功率下降。
R s
C mV / o
− 73 I pv − V pv P pv − V pv
0
C 0
o
C 25
o
C 50
o
C 75
圖 2.7 不同溫度下的 I
pv− V
pv特性曲線
o
C 75
o
C 50
o
C 25
o
C 0
o
C 75
o
C 50
o
C 25
o
C 0
圖 2.8 不同溫度下的 P
pv− V
pv特性曲線
由太陽能特性及式(2.3)可知日照量會影響太陽能電池輸出的端電流,而日
照量與太陽能電池的短路電流關係如下:
(2.6) )
/ (
* )
( G I G kW m 2
I sc = sc
:日照量 G 下的短路電流 I
sc( G )
:日照量 1 時的短路電流
I
sckW m / 2
G :日照量
由式(2.6)可知,若欲求得某日照量下的短路電流 ,只須將當時的日照量 乘上太陽能電池在 1 日照量時的短路電流 即可。利用式(2.3)及式
(2.6),可求出不同日照量對
I
sc( G ) / m 2
kW I
scpv
pv V
I − 、 P pv − V pv 特性曲線的影響,如圖 2.9 及 圖 2.10 所示。由圖 2.9 及圖 2.10 中可知日照量下降會使得太陽能電池的端電流下 降,並使得輸出功率也隨之下降。
1 kW / m
275
20 . kW / m
5
20 . kW / m 1 kW / m
275
20 . kW / m
5
20 . kW / m
圖 2.9 不同日照量下的 I
pv− V
pv特性曲線
1 kW / m
275
20 . kW / m
5
20 . kW / m 1 kW / m
275
20 . kW / m
5
20 . kW / m
圖 2.10 不同日照量下的 P
pv− V
pv特性曲線
串聯電阻 是指太陽能電池輸出端到最大功率追蹤器之間線路的等效電 阻,因此串聯電阻值越大則線路上的損失就越大,系統的效率就越低。利用式(2.3)
可求出三種不同串聯電阻下的 R s
pv
pv V
I − 、 P pv − V pv 特性曲線圖,如圖 2.11 和圖 2.12 所示。由圖 2.11 及圖 2.12 中可知, 對於開路電壓及短路電流沒有影響但卻會 使得太陽能電池的輸出功率下降。
R s
Ω
s
= 0 R
Ω
= 36 0.
R
sΩ
= 8 1.
R
sΩ
s
= 0 R
Ω
= 36 0.
R
sΩ
= 8 1.
R
s圖 2.11 不同串聯電阻下的 I
pv− V
pv特性曲線圖
Ω
s
= 0 R
Ω
= 36 0.
R
sΩ
= 8 1.
R
sΩ
s
= 0 R
Ω
= 36 0.
R
sΩ
= 8 1.
R
s圖 2.12 不同串聯電阻下的 P
pv− V
pv特性曲線
2.3 最大功率追蹤法
由圖 2.13 可知當太陽能電池工作電壓在最大功率點電壓 V max 以下時,太陽能
電池的輸出功率隨太陽能電池端電壓 上升而增加,而當太陽能電池工作電壓在 最大功率點電壓 以上時,太陽能電池的輸出功率隨太陽能電池端電壓上升而 減少。根據上述之太陽能電池特性,我們設計一最大功率追蹤器(Maximum Power Point Tracker, MPPT)以電力電子的技術 [17-19]來控制太陽能電池之端電壓 , 使其能在各種環境條件下皆能輸出最大功率。以下三小節將對本研究所使用之最 大功率追蹤法做一介紹。
V pv
V max
V pv
P
maxV
maxP
maxV
max圖 2.13 太陽能電池輸出功率特性曲線圖
2.3.1 擾動觀察法(Perturbation and Observation method)
擾動觀察法的基本原理為,在固定的週期內逐步增加或減少太陽能電池的端 電壓,若電壓擾動造成太陽電池的輸出功率增加,則下次仍採用相同的擾動方向 增加太陽能電池的端電壓;若擾動造成太陽能電池的輸出功率減少,則下次改採 用相反的擾動方向減少太陽能電池的 端電壓以增加輸出功率,換句話說當 時,則繼續依相同方向增加電壓擾動;反之,若 ,則 改變電壓擾動方向,如圖 2.14 所示。
P PV k , > P PV k , −1 P PV k , < P PV k , −1
Pk
-1
Pk 1 +
Pk
1 +
Vk
-1
Vk Vk
電壓擾動方向 Pk
-1
Pk 1 +
Pk
1 +
Vk
-1
Vk Vk
電壓擾動方向
(a)
Pk
-1
Pk 1 +
Pk
1 +
Vk
-1
Vk
Vk
電壓擾動方向 Pk
-1
Pk 1 +
Pk
1 +
Vk
-1
Vk
Vk
電壓擾動方向
(b)
圖 2.14 擾動觀察法之電壓擾動方式:(a)當 P
PV,k> P
PV,k−1時,(b) 當 P
PV,k< P
PV,k−1時
綜合上述可知,擾動觀察法雖有精簡的控制迴路,其追蹤法則亦相當簡單容 易實現,對於外在的環境影響有較高的強健性,但仍有下列之缺點:
• 無法精確工作在太陽能電池的最大功率輸出點,只能在附近振盪追逐。
• 容易受到太陽能電池電壓、電流突波的影響而造成誤動作。
• 初始值的給定,對於追蹤的效果有一定程度的影響。
• 必須逐次調整控制以趨近最大功率輸出點,而無法瞬時立即的提供最大功 率點的控制。
2.3.2 基於梯度法之最大功率追蹤法[20]
由於擾動觀察法具有無法精確地工作在太陽能電池的最大功率輸出點,只能
在附近振盪追逐的缺失。有鑑於此,我們將擾動觀察法加以改善,非但保留了擾 動觀察法的一些精簡、容易實現等特性,同時亦使上述問題能獲得改善。
因太陽能電池的 特性曲線可視為一非線性函數,而最大功率追蹤法 的目的是要在 特性曲線上求得曲線的最大值,故由線性及非線性規劃的 理論 [21]可知,梯度法(Gradient method)是一種傳統且被廣泛運用於求取函數 極值的方法,就理論上而言,梯度法佔有相當重要的地位,雖然它的運算非常簡 單,但卻有著令人滿意的分析結果。
pv
pv V
P -
pv
pv V
P -
梯度法 [21]:
若一歐式空間 n 維函數 ( f : f E n ),為連續且可微分一次,因函數 為連續 且可微分一次,故
f
∇f ( ) Χ 存在且為一 n 維的列向量 ( row vector ),我們定義一 n 維的行向量 ( column vector ) g ( ) Χ = ∇ Χ f ( ) t ,為方便表示定義 g k 為
(2.7)
t k
k f
g ( Χ ) = ∇ ( Χ )
定義梯度法之疊代演算法如式 (2.8)
k k k
k 1 = Χ − α * g
Χ + (2.8)
其中 α k 為一非負值的常數,搜尋函數的最小點是沿著負梯度 − g k 的方向搜尋。
由太陽能電池之電氣特性可知,若忽略串聯電阻的效應,可得如下之電壓和 功率之關係:
PV PV
PVo
PV V
mkT I qV
I
P exp 1 *
⎭ ⎬
⎫
⎩ ⎨
⎧ ⎥
⎦
⎢ ⎤
⎣
⎡ ⎟ −
⎠
⎜ ⎞
⎝
− ⎛
= l (2.9)
式 (2.9)中,函數 為一非線性函數,且為連續可一次微分之函數,但不同 的是,最大功率追蹤所要找的是函數的最大值,因此搜尋方向上須作一修正,不 再是沿著負梯度 的方向搜尋,而改以正梯度 的方向搜尋。又式 (2.9)中函
P PV ( V PV )
− g k g
k數 P PV 是以電壓V 為其唯一的變數,此時 PV g
k為
= g k
k PV
V PV V
PV PV
k dV
V V dP
g
=
= ( ) )
(
k PV
V V PVo
PVo I mkT mkT
I mkT I
⎭ =
⎩ ⎬
⎨ ⎟
⎜ ⎠
− ⎝
⎥ ⎦
⎢ ⎣ ⎟ −
⎜ ⎠
− ⎝
= ⎧ l ⎡ exp ⎛ qV PV ⎞ 1 ⎤ q exp ⎛ qV PV ⎞ ⎫
(2.10)
由式 (2.10)可知, g
k僅是一個純量,其疊代演算法可寫成式 (2.11)
k k k PV k
PV V g
V , + 1 = , + α * (2.11)
由 -V 特性曲線圖中,我們可以發現由於端電壓有界 ( bounded ),故利用梯 度法於太陽能電池的最大功率點的追蹤上所搜尋到的最大功率點是全域的 ( global )。利用梯度法於最大功率點的追蹤,其非但保留了各種擾動觀察法的各 種優點,同時藉由一個類似動態的擾動量可以改變在太陽能電池輸出功率曲線上 電壓的收斂速度,如圖 2.15 所示,當工作點位於最大功率點左側時,電壓以一較 大的幅度增加,當工作點位於最大功率點附近時,由於此時斜率較小,則提供一 較小的擾動量,反之當工作點位於最大功率點右側時,電壓以一較大的幅度減少,
如此一來便可改善於最大功率輸出點附近振盪追逐的缺點。圖 2.16 為梯度法之模 擬結果,圖 2.17 為擾動觀察法之模擬結果,比較圖 2.16 和圖 2.17,可以發現擾動 觀察法於最大功率輸出點附近振盪追逐的缺點已獲得大幅度的改善,同時也有不 錯的響應速率 ( 其中
P PV PV
4 0
k = .
α )。
Pk
-1
Pk 1 +
Pk
1 +
Vk
-1
Vk Vk
電壓擾動方向 Pk
-1
Pk 1 +
Pk
1 +
Vk
-1
Vk Vk
電壓擾動方向
(a)
Pk
-1
Pk 1 +
Pk
1 +
Vk
-1
Vk
Vk
電壓擾動方向 Pk
-1
Pk 1 +
Pk
1 +
Vk
-1
Vk
Vk
電壓擾動方向
(b)
圖 2.15 梯度法之電壓擾動方式:(a)當 P
PV,k> P
PV,k−1時,(b) 當 P
PV,k< P
PV,k−1時
功率追蹤方向 功率追蹤方向
(a)
P
maxmaxP
(b)
V
maxmaxV
(c)
圖 2.16 梯度法之模擬結果: (a) P -
pvV
pv曲面上的動態軌跡, (b)功率響應 P
pv, (c)電壓響應 V
pv功率追蹤方向 功率追蹤方向
(a)
P
maxmaxP
(b)
V
maxmaxV
(c)
圖 2.17 擾動觀察法之模擬結果:(a) 曲面上的動態軌跡,(b)功率響應 ,(c)電壓 響應
pv
pv
V
P - P
pvV
pv2.3.3 基於模糊控制法則之最大功率追蹤法[22]
由於梯度法係基於太陽能電池之數學模型而求出最大功率點,故太陽能電池 以及元件的老化,均可能使此梯度法失去原有的準確性。因此,Simoes 等人[23,24]
應用模糊控制法則於太陽能電池之最大功率追蹤,惟其缺點是需有繁複的計算及 較大的記憶體;故本研究使用簡易之模糊控制法則於太陽能電池之最大功率追蹤。
模糊控制之觀念係由模糊控制規則構造關係 R,把 R 作為模糊轉換器,將輸 入、輸出的模糊向量按模糊推理的方法來處理,進而確定控制量。實現上述模糊 控制過程,一般來講可以由以下三個步驟來完成:
1. 精確量之離散化或模糊化。
2. 建立模糊控制規則。
3. 輸出訊息的模糊判決(亦稱解模糊化) 。
所以,根據以上的設計觀念,將它應用到實際的太陽能電池的最大功率追蹤
上,可經由以下三個步驟:
(一) 輸入╱輸出變數的選擇與精確量的模糊化
模糊控制器首先要決定出適當的輸出與輸入變數。而在本研究中,是藉由改 變切換開關之工作週期(Duty-cycle)來提升或降低輸出功率,因此基於最大功率 追蹤的變化規則,“ 若增加切換開關工作週期時,而使輸出功率上升時,則繼續 增加工作週期;反之,若增加切換開關工作週期時,而使輸出功率降低的話,則 減少工作週期 ",所以我們利用此控制邏輯設計出模糊控制規則,定義其輸入控 制變數為功率的變化量(ΔP)及工作週期的變化量(ΔDC)。
而控制器採用三角形的歸屬函數如圖 2.18 所示,共分為五個模糊記號,分別 為負大(NB)、負小(NS)、零(ZO)、正小(PS)、正大(PB)。
圖 2.18 模糊控制器之歸屬函數圖 ZO PS
NB NS PB
ZO PS
NB NS PB
0 10 40
-40 -10
0 30 250
-30 -250
(a)
(b) 功率變化量(ΔP)
工作週期的變化量(ΔDC) 1
1
(二) 建立模糊規則庫
模糊規則之建立,基本上,操作者必須對系統之特性十分熟悉,且將控制的 經驗加以總結,進而寫成一條條的控制法則。模糊規則通常是以 IF-THEN 形式表 示包括人類之判斷等模糊控制演算法,並以運用電腦執行模糊推論。本研究中模 糊推論之規則如下所示:
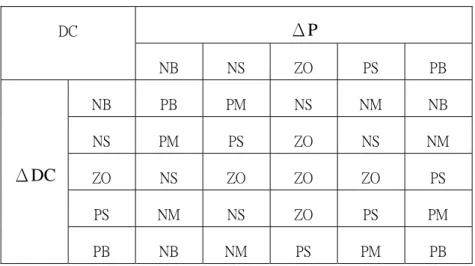
IF ΔDC is PB AND ΔP is PB THEN DC is PB IF ΔDC is PB AND ΔP is PS THEN DC is PM IF ΔDC is PS AND ΔP is PB THEN DC is PM IF ΔDC is PS AND ΔP is PS THEN DC is PS IF ΔDC is NB AND ΔP is PB THEN DC is NB IF ΔDC is NB AND ΔP is PS THEN DC is NM IF ΔDC is NS AND ΔP is PB THEN DC is NM IF ΔDC is NS AND ΔP is PS THEN DC is NS IF ΔDC is ZO AND ΔP is PB THEN DC is PS IF ΔDC is ZO AND ΔP is PS THEN DC is ZO IF ΔDC is ZO AND ΔP is ZO THEN DC is ZO IF ΔDC is ZO AND ΔP is NS THEN DC is ZO IF ΔDC is ZO AND ΔP is NB THEN DC is ZO
……
我們可以得到如表 2.1 所示,為針對不同的誤差值(ΔP)及(ΔDC) ,所對
應的輸出功率值(DC)。
表 2.1 模糊規則表
ΔP
DC
NB NS ZO PS PB NB PB PM NS NM NB NS PM PS ZO NS NM ZO NS ZO ZO ZO PS
PS NM NS ZO PS PM
ΔDC
PB NB NM PS PM PB
(三) 輸出訊息的模糊決策(又稱解模糊化)
要將模糊集合推導至普通集合的映射動作稱之為模糊決策或稱之為解模糊 化。通常可利用重心法來解模糊化,但在本研究係利用查表方法求出輸出量。
利用上述的方法,可以看出歸屬函數比較集中在當功率變化量(ΔP)為零 時,換句話說就是利用一種人工慣量方法,在最大功率點時,持續讓工作週期往 相同方向增加一點或是減少一點,如圖 2.19 所示,由圖中可以看出在斜率越陡的 地方,會產生越短的平台;而在最大功率點附近時,因為趨近滿足δP/δDC=0,
所以會產生比較長的平台,也就是在最大功率點附近會有上下的振動,來滿足最 大功率追蹤。
圖 2.19 輸出功率與工作週期之關係圖
第三章 電壓空間向量調變
3.1 前言
直流-交流轉換器即為換流器(Inverter),換流器之功能是將直流輸入電壓 轉換為所需之大小與頻率的對稱交流輸出電壓。換流器依供應其電源的性質,可 分為電壓源換流器(Voltage Source Inverter,VSI)及電流源換流器(Current Source Inverter, CSI)兩大類。本研究所使用的換流器架構為電壓源換流器 VSI,如圖 3.1 所示。換流器的脈寬調變(Pulse-Width modulated, PWM)方法有相當多的種類,
如正弦波調變法(Sinewave Pulse-Width Modulated, SPWM)、空間向量調變法
(Space Vector Pulse Width Modulated, SVPWM)…等,而本研究採用的是空間向 量調變法,因為換流器的輸入源為定電壓型式,故又可稱為電壓空間向量調變法。
在 3.2 節將對電壓空間向量調變法作一探討。
V
d2
V
d2 V
di
d+
-
+
-
T
A+
T
A−
T
B+
T
B−
T
C+
T
C−
A B C
圖 3.1 三相脈寬調變 ( pulse-width modulated,PWM ) 電壓源換流器
3.2 電壓空間向量調變法則
電壓空間向量調變法的基本原理[9,25-27]是將三相正弦參考電壓信號經過 d-q 靜止座標軸轉換之後得到 d-q 軸座標平面上的參考電壓向量 ,而依據參考 電壓向量 所在的區間可以決定六組功率晶體的切換狀態。
V ref
V ref
如 圖 3.1 所 示 , 功 率 晶 體 的 切 換 狀 態 向 量 [ T A T B T C ] T 與 線 電 壓 向 量 的關係如式 (3.1)所示:
[ V AB V BC V CA ] T
]
(3.1)
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
−
−
−
=
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
C B A d
CA BC AB
T T T V
V V V
1 0 1
1 1 0
0 1 1
由式 (3.1)可知相電壓向量 [ V A V B V C T 與切換狀態向量 [ T A T B T C ] T 的關係如 式 (3.2)所示:
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
−
−
−
−
−
−
=
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
C B A d
C B A
T T T V
V V V
2 1 1
1 2 1
1 1 2 3
1 (3.2)
假設 d 軸與 q 軸為向量平面上的水平軸及垂直軸,則利用式 (3.3)可將相電壓向量 轉換到 d-q 軸電壓向量:
[ V A V B V C ] T
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
⎥ ⎥
⎥
⎢ ⎦
⎢ ⎢
⎣
= −
⎥ ⎦
⎢ ⎤
⎣
⎡
C B A
q d
V V V v
V
2 3 2
0 3
2 1 2
3 2
⎤
⎡ − 1 − 1
(3.3)
利用式 (3.2)及式 (3.3)可將六組功率晶體的切換狀態對應到 d-q 軸座標平面上,
如圖 3.2 所示:
區間 1 區間 2
區間 3
區間 4 區間 6
區間 5 θ γ V
refV
7, V
8為零電壓向量
[ 1 0 0 ]
V
1d q
[ 1 1 0 ]
V
2[ 0 1 0 ]
V
3[ 0 1 1 ]
V
4[ 0 0 1 ]
V
5V
6[ 1 0 1 ]
[ ]
[ 1 0 1 0 1 0 ]
8 7
V
V ,
區間 1 區間 2
區間 3
區間 4 區間 6
區間 5 θ γ V
refV
refV
7, V
8V
7, V
8為零電壓向量
[ 1 0 0 ]
V
1d q
[ 1 1 0 ]
V
2[ 0 1 0 ]
V
3[ 0 1 1 ]
V
4[ 0 0 1 ]
V
5V
6[ 1 0 1 ]
[ ]
[ 1 0 1 0 1 0 ]
8 7
V
V ,
圖 3.2 電壓空間向量相位圖
圖 3.2 中 到 為八種功率晶體狀態組合成的電壓空間向量,其中 到 為非零 電壓空間向量,而 及 為零電壓空間向量。依據參考電壓向量 所在區間的 不同,選用此區間內的兩個相鄰電壓向量來近似 ,而電壓向量的選擇及切換 順序的排定,如下所示:
V 1 V 8 V 1 V 6
V 7 V 8 V ref
V ref
當 V
ref停在區間 1(sector 1)時,則令其切換順序為‧‧‧812721812721‧‧‧。
因此在區間 1 的一個切換週期中
(3.4)
∫ T
Z= ∫ T + ∫ T + T + ∫ + T
T T
ref dt V dt V dt T V dt
0 V 0 1 2 7
1 1 2
1 1 2
Z