Abstract—This paper presents a weighted fuzzy interpolative reasoning method for sparse fuzzy rule-based systems which allows the antecedent variables appearing in the fuzzy rules to have different weights. We also present a weights-learning algorithm to automatically learn the optimal weights of the antecedent variables of the fuzzy rules for the proposed weighted fuzzy interpolative reasoning method. We apply the proposed weighted fuzzy interpolative reasoning method and the proposed weights-learning algorithm to deal with the truck backer-upper control problem. The experimental results show that the proposed fuzzy interpolative reasoning method using the optimally learned weights by the proposed weights-learning algorithm gets better truck backer-upper control results than the existing methods.
I. INTRODUCTION
In recent years, some fuzzy interpolative reasoning methods have been presented to overcome the drawback of sparse fuzzy rule-based systems [1]-[12], [15]-[20]. In [10], Koczy and Hirota presented a linear fuzzy interpolative reasoning method (called the KH method) based on the α-cuts of fuzzy sets, using the fuzzy distance between the observation and the antecedents of the fuzzy rules to get the fuzzy interpolative reasoning result. In [3], Chang et al.
presented a fuzzy interpolative reasoning method (called the CCL method) based on the areas of fuzzy sets. In [5], Chen and Ko presented a fuzzy interpolative reasoning method (called the CK method) based on the increment transformation and the ratio transformation techniques for sparse fuzzy rule-based systems. In [8], Huang and Shen presented a fuzzy interpolative reasoning method (called the HS method) based on the scale and the move transformation techniques.
The fuzzy interpolative reasoning methods presented in [1]-[3], [5], [7]-[9], [11], [12], [16], [18]-[20] deal with fuzzy rule interpolation with many variables appearing in the antecedent parts of fuzzy rules based on the assumption that these variables have the same weights. If we can deal with fuzzy rule interpolation based on the antecedent variables with different weights, then there is room for more flexibility.
In this paper, we present a weighted fuzzy interpolative reasoning method for sparse fuzzy rule-based systems, which allows the antecedent variables appearing in the fuzzy rules have different weights. We also present a weights-learning algorithm to automatically learn the optimal weights of the
S.-M. Chen and Y.-C. Chang are with the Department of Computer Science and Information Engineering, National Taiwan University of Science and Technology, Taipei, Taiwan, R. O. C. (e-mail:
[email protected]; [email protected]).
antecedent variables of the fuzzy rules for the proposed weighted fuzzy interpolative reasoning method. We apply the proposed weighted fuzzy interpolative reasoning method and the proposed weights-learning algorithm to deal with the truck backer-upper control problem. The experimental results show that the proposed fuzzy interpolative reasoning method using the optimally learned weights by the proposed weights-learning algorithm gets better truck backer-upper control results than the ones by the existing methods [3], [5], [8], [13].
II. WEIGHTED FUZZY INTERPOLATIVE REASONING BASED ON BELL-SHAPED MEMBERSHIP FUNCTIONS
In this section, we propose a new method for weighted fuzzy interpolative reasoning based on bell-shaped membership functions.
Definition 2.1: A bell-shaped fuzzy set A in the universe of discourse U can be represented by
A A
A b a
c x e
2
⎟⎟⎠
⎞
⎜⎜⎝
−⎛ −
, where aA and bA
are parameters to control the shape of the membership function of the bell-shaped fuzzy set A and cA is the mean of the bell-shaped fuzzy set A. For simplicity, a bell-shaped fuzzy set A can be represented by (aA, bA, cA).
For example, Fig. 1 shows a bell-shaped fuzzy set A, where A = (2, 2, 5).
Fig. 1. Bell-shaped fuzzy set A = (2, 2, 5).
Let A and B be two bell-shaped fuzzy sets, where A = (aA,
bA, cA) and B = (aB, bB, cB). If cA ≤ cB, then the total ordering relationship between the bell-shaped fuzzy sets A and B is denoted by “A ≺ B”.
In the following, we develop techniques to automatically select the p closest fuzzy rules with respect to the observation based on the neighboring fuzzy rules of the observation and the definition of neighboring fuzzy rules with respect to the observation.
Definition 2.2: Assume that a fuzzy rule in the fuzzy rule base has the following form:
If X1 is 1
1,
AP and X2 is
2,2
AP and … and Xm is P ,m
Am Then Y is Bi,
A New Method for Weighted Fuzzy Interpolative Reasoning Based on Weights-Learning Techniques
Shyi-Ming Chen, Senior Member, IEEE, and Yu-Chuan Chang
978-1-4244-8126-2/10/$26.00 ©2010 IEEE
where Xj denotes the jth antecedent variable which has nj
possible antecedent fuzzy sets, Y denotes the consequence variable which has n possible consequent fuzzy sets, P j
Aj,
denotes the Pjth antecedent fuzzy set of the antecedent variable Xj, Bi denotes the consequence fuzzy set of the consequence variable Y, nj ≥ 2, 1 ≤ Pj ≤ nj, 1 ≤ j ≤ m, and 1 ≤ i
≤ n. Assume that the observation is: X1 is A1*, X2 is A2*, …, and Xm is Am*, and assume that l j
Aj, and r j
Aj, are the left nearest antecedent fuzzy set and the right nearest antecedent fuzzy set with respect to each observation fuzzy set Aj*, respectively, 1 ≤ lj ≤ nj, 1 ≤ rj ≤ nj, and 1 ≤ j ≤ m. A neighboring fuzzy rule with respect to the observation fuzzy sets Aj* is defined as the fuzzy rule whose antecedent fuzzy set of the antecedent variable Xj is either l j
Aj, or r j
Aj, , where 1 ≤ j ≤ m.
The weighted multiple fuzzy rules interpolation scheme using bell-shaped membership functions is shown as follows:
Rule 1: If X1 is A11 (w1) and X2 is A12 (w2) and … and XM is A1m (wm) Then Y is B1
Rule 2: If X1 is A21 (w1) and X2 is A22 (w2) and … and XM is A2m (wm) Then Y is B2
Rule n: If X1 is An1 (w1) and X2 is An2 (w2) and … and XM is Anm (wm) Then Y is Bn
Observation: X1 is A1*and X2 is A2* and … and Xm is Am*
Conclusion: Y is B*
where Xj denotes the jth antecedent variable, Y denotes the consequence variable, the antecedent fuzzy set Aij of Rule i is represented by (aAij ,bAij ,cAij), the consequence fuzzy set Bi
of Rule i is represented by (aBi ,bBi ,cBi), the jth observation fuzzy set Aj* is represented by ( , , *)
* j
* j
j A A
A b c
a , the fuzzy
interpolative reasoning result B* is represented by )
, ,
(aB* bB* cB* , wj denotes the weight of the antecedent variable Xj, wj ≥ 0, 1 ≤ j ≤ m, m denotes the number of variables appearing in the antecedents of fuzzy rules, and n denotes the number of fuzzy rules. Based on the weighted multiple fuzzy rules interpolation scheme, the proposed method for weighted fuzzy interpolative reasoning based on bell-shaped membership functions is now presented as follows:
Step 1: Choose p neighboring fuzzy rules with respect to the observation, which are the closest fuzzy rules with respect to the observation and 1 ≤ p ≤ n.
Step 2: Assume that Rule 1, Rule 2, …, and Rule p are the p closest fuzzy rules with respect to the observation. Calculate the weight Wi of Rule i, where 1 ≤ i ≤ p. Assume that Aljj and
j rj
A are the left nearest antecedent fuzzy set and the right nearest antecedent fuzzy set with respect to the observation fuzzy set Aj*, respectively, where 1 ≤ lj ≤ p and 1 ≤ rj ≤ p, and let
) 1 (
1
where if
1
if
1
⎪⎪
⎩
⎪⎪
⎨
⎧
≤
≤
−
− −
=
∗
∗ ∗
, p i ,
A A ,
, A A A , c c
c c
j ij
j r j j l A
A A A j
l j j
jj l jj r
jj j l
j
≺
≺ λ ≺
⎪⎪
⎩
⎪⎪
⎨
⎧
≤
≤
−
− −
=
∗
∗ ∗
(2)
1
where if
1
if
1
, p i ,
A A ,
, A A A , c c
c c
ij j
j r j j l A
A A A j
r j j
jj l jj r
jj j r
j
≺
≺ λ ≺
where 1 ≤ j ≤ m. Let
) 3 ( , Min
Min
11 1
∑= ≤ ≤
≤
= p≤
q
qj m j j
ij m j j i
w w W
λ λ
where Wi denotes the weight of Rule i, 0 ≤ Wi≤ 1, 1 ≤ i ≤ p and 1 ≤ j ≤ m.
Step 3: Calculate the value ∗
c of the fuzzy interpolative B
reasoning result B* = (aB* ,bB* ,cB*),shown as follows:
,
∑1
=
×
=
∗
p i
B
B Wi c i
c (4)
where 0 ≤ Wi ≤ 1 and 1 ≤ i ≤ p.
Step 4: Calculate the value of ∗
bB of the fuzzy interpolative reasoning result B* = (aB* ,bB* ,cB*),shown as follows:
,
∑1
=
×
=
∗
p
i
B
B Wi b i
b (5)
where 0 ≤ Wi ≤ 1 and 1 ≤ i ≤ p.
Step 5: Calculate the value of ∗
aB of the fuzzy interpolative reasoning result B* = (aB* ,bB* ,cB*),shown as follows:
(6)
0 , if ,
, 0 , if
,
1
1 m
1 1
⎪⎪
⎪⎪
⎪⎪
⎩
⎪⎪
⎪⎪
⎪⎪
⎨
⎧
=
∀
×
>
∃
⎟⎟
⎟⎟
⎟⎟
⎠
⎞
⎜⎜
⎜⎜
⎜⎜
⎝
⎛
×
×
⎟×
⎟
⎠
⎞
⎜⎜
⎝
⎛ ×
=
∑
∑ ∑
∑
=
=
=
=
∗
∗
∗
, a ij a
w
a ij
a w W a a
w a
j ij
ij ij i j
A m
j j A
A p
, i
j
A j
B i
m
j j A
B
where 0 ≤ Wi ≤ 1, 1 ≤ i ≤ p and 1 ≤ j ≤ m. Therefore, we can get the fuzzy interpolative reasoning result B*, where B* =
) , ,
(aB* bB* cB* .
…
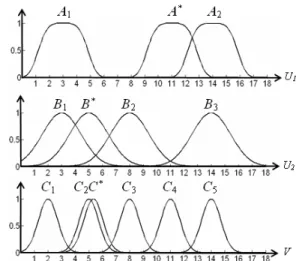
Example 2.1: Let us consider the following weighted multiple fuzzy rules interpolation scheme using bell-shaped membership functions shown in Fig. 2:
Rule 1: If X1 is A1 (w1) and X2 is B1 (w2) Then Y is C2
Rule 2: If X1 is A1 (w1) and X2 is B2 (w2) Then Y is C3
Rule 3: If X1 is A1 (w1) and X2 is B3 (w2) Then Y is C4
Rule 4: If X1 is A2 (w1) and X2 is B1 (w2) Then Y is C1
Rule 5: If X1 is A2 (w1) and X2 is B2 (w2) Then Y is C3
Rule 6: If X1 is A2 (w1) and X2 is B3 (w2) Then Y is C5 Observation: X1 is A*and X2 is B*
Conclusion: Y is C*
where A1 = (2, 2, 3), A2 = (2, 2, 14), B1 = (2, 1, 3), B2 = (2, 1, 8), B3 = (2, 1, 14), C1 = (1, 1, 2), C2 = (1, 1, 5), C3 = (1, 1, 8), C4 = (1, 1, 11), C5 = (1, 1, 14), A* = (2, 2, 11) and B* = (2, 1, 5).
Assume that the fuzzy interpolative reasoning result C* is a bell-shaped membership function represented by
)
(aC∗,bC∗,cC∗ and assume that the weights of the antecedent variables X1 and X2 are 0.6 and 0.4, respectively (i.e., w1 = 0.6 and w2 = 0.4). Then, the proposed weighted fuzzy interpolative reasoning method is illustrated as follows:
[Step 1] From Fig. 2, we can see that Rule 1, Rule 2, Rule 4 and Rule 5 are the four closest fuzzy rules with respect to the observation “X1 is A*and X2 is B* ”, where A1 and A2 are the left nearest antecedent fuzzy set and the right nearest antecedent fuzzy set with respect to the observation fuzzy set A*, respectively (i.e., A1 ≺ A*≺ A2), and B1 and B2 are the left nearest antecedent fuzzy set and the right nearest antecedent fuzzy set with respect to the observation fuzzy set B*, respectively (i.e., B1 ≺ B*≺ B2).
[Step 2] Based on Eq. (1), we can calculate λ11 and λ12 for the left nearest antecedent fuzzy sets A1 and B1 with respect to the observation fuzzy set A* and B*, respectively, where λ11 = 0.273 and λ12 = 0.6. Based on Eq. (2), we can calculate λ21
and λ22 for the right nearest antecedent fuzzy sets A2 and B2
with respect to the observation fuzzy set A* and B*, respectively, where λ21 = 0.733 and λ22 = 0.4. Based on Eq.
(3), we can calculate the weights W1, W2, W3 and W4 of the fuzzy rules Rule 1, Rule 2, Rule 3 and Rule 4, respectively, where W1 = 0.23, W2 = 0.22, W4 = 0.33 and W5 = 0.22.
[Step 3] Based on Eq. (4), we can calculate the mean cC∗ of the fuzzy interpolative reasoning result C* = (aC*,bC*,cC*), where cC∗ = 5.33.
[Step 4] Based on Eq. (5), we can calculate the value of bC∗
of the fuzzy interpolative reasoning result C* = )
(aC∗,bC∗,cC∗ , where bC∗ = 1.
[Step 5] Based on Eq. (6), we can calculate the value of aC∗
of the fuzzy interpolative reasoning result C* = )
, ,
(aC∗ bC∗ cC∗ , where aC∗ = 1. Therefore, we can get fuzzy interpolative reasoning result C* = (1, 1, 5.33), as shown in Fig. 2.
Fig. 2. Weighted multiple fuzzy rules interpolation scheme of Example 2.1 (when w1 = 0.6 and w2 = 0.4).
III. AWEIGHTS-LEARNING METHOD FOR DEALING WITH THE TRUCK BACKER-UPPER CONTROL PROBLEM In the section, we propose a weights-learning method for the proposed weighted fuzzy interpolative reasoning method for dealing with the truck backer-upper control problem. The goal of the truck backer-upper control problem is to back up a truck to a loading dock as precisely as possible. The situation can be illustrated in Fig. 3 [8], where the small white cab is the truck whose behavior can be described by three state variables x ∈ [0, 100], y ∈ [0, 100] and φ ∈ [-90, 270], where x denotes the horizontal axis, y denotes the vertical axis and φ denotes the azimuth angle. From Fig. 3, we can see that the truck starts from an initial state and should back up to the loading dock with the target state (50, 200, 90), i.e., x = 50, y
= 200, and φ = 90. In order to control the truck, the steering angle θ ∈ [-30, 30] is provided for each move of the truck.
Therefore, the truck backer-upper control problem can be formulated as θ = f(x, y, φ).
Fig. 3. Truck backer-upper system [8].
In general, it is assumed that the distance between the truck and the loading dock is quite large, and the state variable y can be ignored, so that the truck backer-upper control problem can be simplified into θ = f(x, φ) [8]. Based on the weighted multiple fuzzy rules interpolation scheme, we assume that each fuzzy rule of a given fuzzy rule base for truck backer-upper control is represented as follows:
If x is A (wx) and φ is B (wφ) Then θ is C,
where x and φ are the antecedent variables denoting the horizontal axis and the azimuth angle, respectively, θ is the consequence variable denoting the steering angle, A, B and C are the possible fuzzy sets of x, φ and θ, respectively, and wx
and wφ denote the weights of the antecedent variables x and φ, respectively. Let wx(k) and wφ(k) denote the weights of the antecedent variables x and φ, respectively, at the kth training iteration, Ex(k) and Eφ(k) denote the average error rates at the kth training iteration with respect to state variable x and φ, respectively, and Ec denote the minimum composite error rate.
Given the initial state (xis ,yis ,φ and the target state is) )
, ,
(xti yit φ of each training sample Sit i, where 1 ≤ i ≤ P, P denotes the number of training samples and the learning rate β ∈ [0, 1], the proposed weights-learning algorithm for truck backer-upper control is now presented as follows:
Step 1: Let k = 1, let wx(k) = 0.5, let wφ(k) = 0.5 and let Ec = ∞.
Step 2: Let i = 1.
Step 3: Input the initial state of the ith training sample Si. Step 4: Let the state values xi and φi of the training sample Si
be the observation of the proposed weighted fuzzy interpolative reasoning method with respect to the antecedent variables x and φ, respectively. Then, apply the proposed weighted fuzzy interpolative reasoning method to generate the fuzzy interpolated result θ based on the observation xi and φi.
Step 5: Calculate the next state (xi′, yi′, φi′) of the truck using the fuzzy interpolated result θ obtained in Step 4, shown as follows [13]:
xi′ = xi + r × (cos(f(φi) + f(θ)) + sin(f(θ)) × sin(f(φi))), (7) yi′ = yi + r × (sin(f(φi) + f(θ)) - sin(f(θ)) × cos(f(φi))), (8) φi′ = (180/pi) × ( f(φi) – r × asin((2 × sin(f(θ))/b)), (9) where xi, yi and φi are the state values of the current states of the truck, xi′, yi′ and φi′ are the state values of the next state of the truck, θ is the fuzzy interpolated result obtained in Step 3 denoting the steering angle of the truck, f is a transformation function, r is the coefficient factor for the moving velocity of the truck, and b is the coefficient factor for the rolling velocity of the truck’s wheels. In order to compare the experimental result of the proposed method with the existing methods, we let r = 2, b = 4, f(θ) = θ × pi/180, f(φi) = φi × pi/180 and pi = 3.14159.
Step 6: If the next state of the truck reaches the suspended condition yi′≥ y , then let the next state be the final state ti
) , ,
(xif yif φ of the training sample Sif i, store the final state of the training sample Si and go to Step 7. Otherwise, let the next state be the current state of the truck and go to Step 4.
Step 7: If i = P, then go to Step 8. Otherwise, let i = i + 1 and go to Step 3.
Step 8: Based on the final state (xif ,yif ,φ and the target if) state (xit ,yit ,φ of each training sample Sit) i, where 1 ≤ i ≤ P,
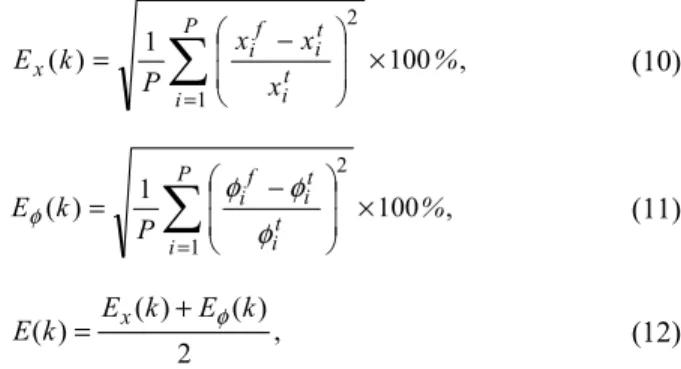
calculate the average error rates Ex(k) and Eφ(k) and the composite error rate E(k) at the kth training iteration, where
, 1 100
) (
1
2
x % x x k P
E
P
i t
i it if
x ⎟⎟ ×
⎠
⎞
⎜⎜
⎝
⎛ −
= ∑
=
(10)
, 1 100
) (
1
2
P % k E
P
i t
i it if ⎟⎟ ×
⎠
⎞
⎜⎜
⎝
⎛ −
= ∑
= φ
φ
φ φ (11)
2 , ) ( ) ) (
( E k E k
k
E x + φ
= (12) Ex(k) and Eφ(k) denote the average error rates of the given training samples at the kth training iteration with respect to the state variable x and φ, respectively, and E(k) denotes the composite error rate of the average error rates Ex(k) and Eφ(k) at the kth training iteration. In this paper, we use Eqs. (10)-(12) to evaluate the accuracy of the final state of each training sample.
Step 9: Update the weights wx(k) = 0.5 and wφ(k) at the kth training iteration based on the proposed weights-refinement algorithm shown in Fig. 4, where the learning rate β ∈ [0, 1], σx and σφ are flags to determine whether the weights wx(k) and wφ(k) at the kth training iteration should be increased or decreased, respectively. The values of σx and σφ are initialized to 1.
Fig. 4. The procedure of the kth training iteration of the proposed weights-refinement algorithm.
Step 10: If E(k) < Ec, then let the weight wx = wx(k) and wφ = wφ(k), let the average error rate Ex = Ex(k) and Eφ = Eφ(k), and let the minimum composite error rate Ec = E(k). Otherwise, keep the value of Ec unchanged.
Step 11: If k = 300, then Stop. Otherwise, let k = k + 1 and go to Step 2.
if E(k) < Ec then {
if Ex(k) < Ex(k − 1) then
wx(k + 1) = wx(k) + σx × β × Ex(k) else
wx(k + 1) = wx(k);
if Eφ(k) < Eφ(k − 1) then
wφ(k + 1) = wφ(k) + σφ × β × Eφ(k) else
wφ(k + 1) = wφ(k);
} else {
wx(k + 1) = wx(k);
σx = − σx; wφ(k + 1) = wφ(k);
σφ = − σφ
}
IV. EXPERIMENTAL RESULTS
In the following, we apply the proposed weighted fuzzy interpolative reasoning method and the proposed weights-learning method to deal with the truck backer-upper control problem. Fig. 5 shows the nine fuzzy rules of the FISMAT toolbox [13], where each row shown in Fig. 5 denotes a fuzzy rule, shown as follows:
If x is A and φ is B Then θ is C,
where x and φ are the antecedent variables denoting the horizontal axis and the azimuth angle, respectively, θ is the consequence variable denoting the steering angle, and A, B and C are the possible fuzzy sets of x, φ and θ, respectively.
Fig. 5. Membership functions of the nine fuzzy rules [13].
Because the domain partitions shown in Fig. 5 are symmetrical, some fuzzy rules can be interpolated by other fuzzy rules. For example, Rule 4 and Rule 6 have the same antecedent variable φ and they can be mirrored by Rule 5 with respect to the antecedent variable x. It indicates that Rule 5 can be interpolated by Rule 4 and Rule 6 using fuzzy rule interpolation. In the same way, Rule 2 can be interpolated by Rule 1 and Rule 3, and Rule 8 can be interpolated by Rule 7 and Rule 9. In [8], Huang and Shen removed the fuzzy rule Rule 2, Rule 5 and Rule 8 from the nine fuzzy rules to get a more compact fuzzy rule base consisting of six fuzzy rules, as shown in Fig. 6. In order to compare the experimental results of the method presented in [8], we use the compact fuzzy rule base of the six fuzzy rules shown in Fig. 6 for truck backer-upper control, where each fuzzy rule is represented as follows:
If x is A (wx) and φ is B (wφ) Then θ is C,
where x and φ are the antecedent variables denoting the horizontal axis and the azimuth angle, respectively, θ is the consequence variable denoting the steering angle, A, B and C are the possible fuzzy sets of x, φ and θ, respectively, and wx
and wφ denote the weights of the antecedent variables x and φ, respectively.
Fig. 6. Membership functions of the six fuzzy rules [8].
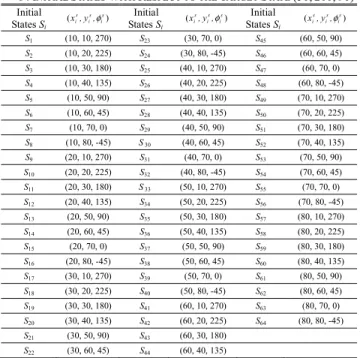
TABLE I shows the initial states of 64 training samples with respect to the target state (50, 200, 90).
TABLE I
64INITIAL STATES WITH RESPECT TO THE TARGET STATE (50,200,90) Initial
States Si
)
(xsi,yis,φis Initial States Si
) (xis,yis,φis Initial
States Si
) (xis,yis,φis
S1 (10, 10, 270) S23 (30, 70, 0) S45 (60, 50, 90) S2 (10, 20, 225) S24 (30, 80, -45) S46 (60, 60, 45) S3 (10, 30, 180) S25 (40, 10, 270) S47 (60, 70, 0) S4 (10, 40, 135) S26 (40, 20, 225) S48 (60, 80, -45) S5 (10, 50, 90) S27 (40, 30, 180) S49 (70, 10, 270) S6 (10, 60, 45) S28 (40, 40, 135) S50 (70, 20, 225) S7 (10, 70, 0) S29 (40, 50, 90) S51 (70, 30, 180) S8 (10, 80, -45) S 30 (40, 60, 45) S52 (70, 40, 135) S9 (20, 10, 270) S31 (40, 70, 0) S53 (70, 50, 90) S10 (20, 20, 225) S32 (40, 80, -45) S54 (70, 60, 45) S11 (20, 30, 180) S 33 (50, 10, 270) S55 (70, 70, 0) S12 (20, 40, 135) S34 (50, 20, 225) S56 (70, 80, -45) S13 (20, 50, 90) S35 (50, 30, 180) S57 (80, 10, 270) S14 (20, 60, 45) S36 (50, 40, 135) S58 (80, 20, 225) S15 (20, 70, 0) S37 (50, 50, 90) S59 (80, 30, 180) S16 (20, 80, -45) S38 (50, 60, 45) S60 (80, 40, 135) S17 (30, 10, 270) S39 (50, 70, 0) S61 (80, 50, 90) S18 (30, 20, 225) S40 (50, 80, -45) S62 (80, 60, 45) S19 (30, 30, 180) S41 (60, 10, 270) S63 (80, 70, 0) S20 (30, 40, 135) S42 (60, 20, 225) S64 (80, 80, -45) S21 (30, 50, 90) S43 (60, 30, 180)
S22 (30, 60, 45) S44 (60, 40, 135)
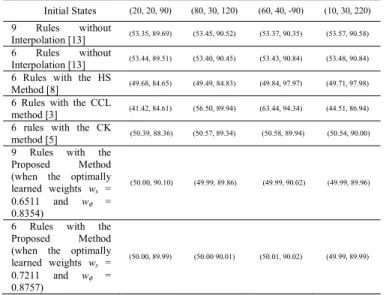
Based on the six fuzzy rules shown in Fig. 6 and based on the 64 training samples shown in TABLE I, the proposed weights-learning method uses the learning rate β = 0.6 to get the optimally learned weights wx = 0.7211 and wφ = 0.8757 and to obtain the minimum composite error rate 0.1437 %.
Moreover, we also apply the proposed method to train the optimal weights wx and wφ of the antecedent variables of the original nine fuzzy rules. The proposed weights-learning method uses the learning rate β = 0.7 to get the optimally learned weights wx = 0.6511 and wφ = 0.8354 and to obtain the minimum composite error rate 0.3625 %. TABLE II shows the reaching states of the four trajectories for different methods with respect to the target state (50, 200, 90). From TABLE II, we can see that the proposed weighted fuzzy interpolative reasoning method using the optimally learned