成大研發快訊 第五卷 第三期 - 2008年七月十八日 [ http://research.ncku.edu.tw/re/articles/c/20080718/3.html ]
於混沌系統控制之逆步順滑模態控制器設計
陳介力
1,*,
姚賀騰
2,
彭兆仲
1 1成功大學航空太空工程學系 2遠東大學電機工程學系 E-mail:[email protected]International Journal of Nonlinear Sciences and Numerical Simulation, Vol.8, No.2, 137-146, 2007.
在
這篇文章中,我們簡短的介紹一個能夠獲得大範圍全域漸近穩定 控制律之控制設計方法。這個方法幫助我們去妥善處理一個具有未知 不確定性所影響的高度非線性動態系統,並使受控系統滿足強健性。 混沌行為,如Fig.1所示,是一個十分特殊的非線性行為,這個行為在 過去20年間已經廣泛的被研究。混沌系統會產生許多特別的特徵,包 含對於初始值的強烈敏感度、長時間不可預期的行為以及在相位平面 不規律的移動特徵。因為混沌現象通常很難去預測它未來的行為,因 此混沌現象容易導致系統不穩定,性能降低、甚至會造成不可預期的 情況,所以混沌行為有時被認為是一種負面的動態現象因而在許多狀 況下此種混沌行為是必須加以消除的;然而,在一些情況中,混沌現 象卻有助於系統的運作。從機械操作的角度來看,規律的動態或是機 械震動是一般所期望之行為,如同精密定位機械裝置來說,外部震動往往會造成嚴重的定位誤差;就原子尺度的測量來說,原子力顯微鏡(Atomic Force Microscope, AFM) 是一個很好的選擇;但微探針的震動已經被實驗證實有混沌的現象,這個不規則的移動現象造成了原子力 顯微鏡可能無法量得精準的結果;此外,如直流對直流轉換器(dc-dc convertor)等亦參雜混沌之動態行 為。
Fig 1. Dynamic response of chaotic systems 相反的,諸多的應用也證明了混沌現象在其他方面也帶來的卓越貢獻,在化工領域上,混沌現象提供了較 好的混合效率與產生更多獨特的化學反應。在化學反應過程,電極的品質對於反應效率有相當大的影響。 為了追求更好的反應效率,混沌震動提供電極成品的適度緻密度,使其具有較好的品質;此外,對於通信 的快速發展,基於混沌理論的通訊技術設計,近十年來也吸引了相當多的注意。由於其具有頻率分佈廣闊 的特性,一般難以用簡單的頻譜分析取得隱藏的訊息。因此混沌信號被應用在透過遮罩的編碼資料上,且 其確實在通信安全方面備有重大的貢獻。更簡單的說,混沌的行為確保了通信安全;混沌理論也被應用在 天氣變化的模擬上,或是人口群聚與成長之分析。 混沌行為在控制工程領域可分為兩個主要的範疇:一個是抑制混沌現象;另一個是在非線性系統中,產生 或是增強混沌現象,對於這兩類而言,均著重於強健控制演算法的設計。基於李阿普若夫 (Lyapunov)穩定 性的証明,逆步設計(Backstepping design)是諸多控制法則其中之一對於非線性控制器設計的方法。此法 非常適合應用在非線性系統的設計中並提供設計者找到穩定的控制器(之集合)。利用逆步 (Backstepping)設計將系統變數視為次系統的獨立輸入,每一設計步驟的結果皆須滿足李阿普若夫穩定條 件,以確保每個次系統的穩定性。傳統的逆步設計方法,系統的強健性可以依賴高的系統增益來達成;然 而,系統可能具有不確定的參數以及未知模型(unmodel)動態以致於單純使用高增益的逆步設計無法達 到漸近穩定的要求。為了解決這個問題,本文提出了一個基於逆步方法的順滑控制器設計,它承襲了逆步 方法與順滑控制器的優點,並能提供具不確定參數非線性系統的漸近穩定性。考慮一個2階的非線性動態 系統, (1.a) (1.b) 其中 , 和 是連續的函數。為簡單起見,在此推導中我們把在(1,a)之中的函數視為已知,且 函數 的上限也可得。當處理此一系統時,如何選擇一個適合的控制律是在整體設計的過程中,扮演 著一個重要的關鍵點。 因此,我們的控制目標是找到一個適當的控制律 使得(1)為穩定。 首先吾人忽略子系統(1.b),並且假設狀態 是一個獨立(或虛擬)的控制輸入 ,如此可得 (2) 針對(2)之系統,因 是可控的(在前述的假設下),控制器的設計變成針對一個標準的一階子系統(2),如 此,控制的主要任務成為提供一個適當的 ,以至於李阿普若夫函數 滿足 (3) 方程式(3)表示儲存在系統中的能量,隨著時間的增加會慢慢的減少。換句話說,所有脫離原點(即平衡點) 的初始狀態,當時間趨近於無窮時終會收斂至零。注意(2)-(3)中所使用到的 ,並非代表特定的一個控制 結構,它實際上代表著能夠穩定系統(2)的控制器集合。不幸的是,在一般的情況下,該虛擬的控制輸 入 並無法被直接操縱,因而(2)-(3)的條件無法成立。為了保證(2)-(3)的存在,我們定義一個額外的誤差 變量如下 3 of 6
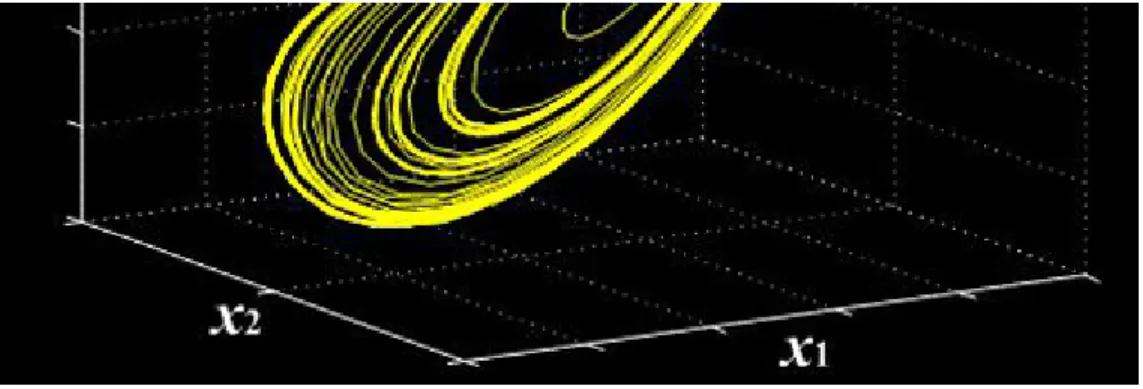
在此平面上,理想的順滑動態將隨即發生。另言之,此一新增之誤差狀態 可作為順滑平面的選擇。令控 制律 當 (6) 定義一個Lyapunov函數為 ,將控制律(6)帶入 對時間之微分可 得 。此通常被稱為接近條件,暗示著在有限的時間內 。因此,我 們可推論期望之系統行為能以達成。在以下內容裡,吾人以Genesio系統為範例來說明混沌系統之控制。 含控制輸入之Genesio系統的數學方程式可以被描述成 (7) 其中,不確定項和外擾將分別表為 和 。 此外,當 , 與 時,Genesio系統具混沌現象。其在狀態平面 上之動態行 為如圖2所示。圖3表示當所提出的控制律加至系統後( ).,系統狀態隨即收斂到零;即系統狀態被迫 使朝向原點前進並維持該狀態不再產生偏離。在這份報告裡,簡單的介紹了一種逆步式順滑模態控制器 (backstepping SMC)的設計方法。此逆步式的設計為設計者提供一個系統化的出一個順滑模態控制的設計 達成期望的動態性能。
圖. 2. Genesio 混亂系統,帶入外擾的初始狀態[x10 , x20 , x30] = [3,−4,2]