FANUC > series
维修说明书
B-82725CM/02
R-30
i
A Mate控制装置
在使用机器人之前,务须仔细阅读“FANUC Robot 安全手册(FANUC Robot Safety Manual : B-80687EN)”,
并在理解该内容的基础上使用机器人。
·本说明书的任何内容不得以任何方式复制。
·所有参数指标和设计可随时修改,恕不另行通知。
本说明书中所载的产品,受到日本国《外汇和外国贸易法》的限制。从日本将这些出 口到其他国家时,必须获得日本国政府的出口许可。
另外,将该产品再出口到其他国家时,应获得再出口该产品的国家的政府许可。此外,
该产品可能还受到美国政府的再出口法的限制。
若要出口或者再出口此类产品,请向
FANUC 公司洽询。我们试图在本说明书中描述尽可能多的情况。
感谢贵公司此次购买FANUC(发那科)机器人。
本说明资料说明为安全使用机器人而需要遵守的内容。
在使用机器人之前,务须熟读并理解本资料中所载的内容。
有关操作机器人时的详细功能,请用户通过说明书充分理解其规格。
如果说明书与本资料存在差异,应以本资料为准。
目录
前言--- s-2 1 警告、注意和注释 --- s-3 2 连接至急停电路 --- s-4 3 维修说明书中的警告事项 --- s-5
为安全使用
前言
机器人不能单个进行作业,只有安装上机械手,构架起外围设备和系统才可进行 作业。
在考虑其安全性时,不能将机器人独立起来考虑,而应作为整个系统来考虑。
在使用机器人时,务须对安全栅栏采取相应的措施。
另外,我公司按如下方式定义与系统相关的人员。
请按照不同的作业人员,确认是否需要使其接受专门针对机器人的培训。
操作者 进行如下的作业。
• 接通/断开系统的电源
• 起动或停止程序
• 恢复系统的报警状态
操作者不得在安全栅栏内进行作业。
编程人员/示教人员 除了操作者的作业外,
• 还进行机器人的示教、外围设备的调试等安全栅栏内的作业。
上述人员必须接受针对机器人的专业培训。
维护技术人员 除了编程人员的作业外,
• 还可以进行机器人的修理和维护。
上述人员必须接受针对机器人的专业培训。
1 警告、注意和注释
本说明书包括保证操作者人身安全以及防止机床损坏的有关安全的注意事项,并 根据它们在安全方面的重要程度,在正文中以“警告”和“注意”来叙述。
有关的补充说明以“注释”来描述。
用户在使用之前,必须熟读这些“警告”、“注意”和“注释”中所叙述的事项。
警告
适用于:如果错误操作,则有可能导致操作者死亡或受重伤。
注意
适用于:如果错误操作,则有可能导致操作者受轻伤或者损坏设备。
注释
指出除警告和注意以外的补充说明。
请仔细阅读本说明书,并加以妥善保管。
2 连接至急停电路
本章描述了有关连接至急停电路的警告。
2.1 报警
警告
在连接与急停相关的外围设备(安全栅栏等)和机器人的各类信号(外 部急停、栅栏、伺服等)时,务须确认急停的动作,以避免错误连接。
3 维修说明书中的警告事项
本章描述了维修说明书中的一般性警告。
3.1 一般注意事项
警告
不要在下面所示的情形下使用机器人。否则,不仅会给机器人和外围 设备造成不良影响,而且还可能导致作业人员受重伤。
- 在有可燃性的环境下使用
- 在有爆炸性的环境下使用
- 在存在大量辐射的环境下使用
- 在水中或高湿度环境下使用
- 以运输人或动物为目的的使用方法
- 作为脚搭子使用(爬到机器人上面,或悬垂于其下)
警告
使用机器人的作业人员应佩带下面所示的安全用具后再进行作业。
- 适合于作业内容的工作服
- 安全鞋
- 安全帽
注释
进行编程和维护作业的作业人员,务须通过FANUC 公司的培训课程接 受适当的培训。
3.2 安装时的注意事项
警告
搬运或安装机器人时,务须按照FANUC 公司所示的方法正确地进行。
如果以错误的方法进行作业,则有可能由于机器人的翻倒而导致作业 人员受重伤。
注意
在安装好以后首次使机器人操作时,务须以低速进行。然后,逐渐地 加快速度,并确认是否有异常。
3.3 操作时的注意事项
警告
在使机器人操作时,务须在确认安全栅栏内没有人员后再进行操作。
同时,检查是否存在潜在的危险,当确认存在潜在危险时,务须排除 危险之后再进行操作。
注意
在使用操作面板和示教操作盘时,由于戴上手套操作有可能出现操作 上的失误,因此,务须在摘下手套后再进行作业。
注释
程序和系统变量等的信息,可以保存到软盘中(选项)。为了预防由 于意想不到的事故而引起数据丢失的情形,建议用户定期保存数据(见 操作说明书)。
3.4 编程时的注意事项
警告
编程时应尽可能在安全栅栏的外边进行。因不得已情形而需要在安全 栅栏内进行时,应注意下列事项。
- 仔细察看安全栅栏内的情况,确认没有危险后再进入栅栏内部。
- 要做到随时都可以按下急停按钮。
- 应以低速运行机器人。
- 应在确认清整个系统的状态后进行作业,以避免由于针对外围设备 的遥控指令和动作等而导致作业人员陷入危险境地。
注意
在编程结束后,务须按照规定的步骤进行测试运转(见操作说明书)。
此时,作业人员务须在安全栅栏的外边进行操作。
注释
进行编程的作业人员,务须通过FANUC 公司的培训课程接受适当的培 训。
3.5 维护作业时的注意事项
警告
应尽可能在断开机器人和系统电源的状态下进行作业。当接通电源时,
有的作业有触电的危险。此外,应根据需要上好锁,以使其他人员不 能接通电源。即使是在由于迫不得已而需要接通电源后再进行作业的 情形下,也应尽量按下急停按钮后再进行作业。
警告
在更换部件时,务须事先阅读维修说明书,在理解操作步骤的基础上 再进行作业。若以错误的步骤进行作业,则会导致意想不到的事故,
致使机器人损坏,或作业人员受伤。
警告
在进入安全栅栏内部时,要仔细察看整个系统,确认没有危险后再入 内。如果在存在危险的情形下不得不进入栅栏,则必须把握系统的状 态,同时要十分小心谨慎地入内。
警告
将要更换的部件,务须使用FANUC 公司指定部件。若使用指定部件以
警告
在拆卸电机和制动器时,应采取以起重机等来吊运等措施后再拆除,
以避免臂等落下来。
警告
进行维修作业时,因迫不得已而需要移动机器人时,应注意如下事项。
- 务须确保逃生退路。应在把握整个系统的操作情况后再进行作业,
以避免由于机器人和外围设备而堵塞退路。
- 时刻注意周围是否存在危险,作好准备,以便在需要的时候可以随 时按下急停按钮。
警告
在使用电机和减速机等具有一定重量的部件和单元时,应使用起重机 等辅助装置,以避免给作业人员带来过大的作业负担。需要注意的是,
如果错误操作,将导致作业人员受重伤。
注意
注意不要因为洒落在地面的润滑油而滑倒。应尽快擦掉洒落在地面上 的润滑油,排除可能发生的危险。
注意
在进行作业的过程中,不要将脚搭放在机器人的某一部分上,也不要 爬到机器人上面。这样不仅会给机器人造成不良影响,而且还有可能 因为作业人员踩空而受伤。
注意
以下部分会发热,需要注意。在发热的状态下因不得已而非触摸设备 不可时,应准备好耐热手套等保护用具。
- 伺服电机
- 控制部内部
- 标有“注意高温”标记的场所
注意
在更换部件时拆下来的部件(螺栓等),应正确装回其原来的部位。
如果发现部件不够或部件有剩余,则应再次确认并正确安装。
注意
在进行气动系统的维修时,务须释放供应气压,将管路内的压力降低 到0 以后再进行。
注意
在更换完部件后,务须按照规定的方法进行测试运转(见操作说明书)。
此时,作业人员务须在安全栅栏的外边进行操作。
注意
维护作业结束后,应将机器人周围和安全栅栏内部洒落在地面的油和 水、碎片等彻底清扫干净。
注意
更换部件时,应注意避免灰尘或尘埃进入机器人内部。
注释
进行维护和检修作业的作业人员,务须通过FANUC 公司的培训课程接 受适当的培训。
注释
进行维护作业时,应配备适当的照明器具。但需要注意的是,不应使 该照明器具成为导致新的危险的根源。
注释
务须进行定期检修(见维修说明书)。如果懈怠定期检修,不仅会影 响到机器人的使用寿命,而且还会导致意想不到的事故。
前言
本说明书就下列机型进行说明。
机型名称 简称
FANUC Robot LR Mate 200iC LR Mate 200iC FANUC Robot ARC Mate 100iC ARC Mate 100iC FANUC Robot M-10iA M-10iA
1 安全预防措施
在运用机器人和外围设备及其组合的机器人系统时,必须充分研究作业人员和系 统的安全预防措施。为安全使用发那科机器人的注意事项,归纳在“FANUC Robot 安全手册(FANUC Robot Safety Manual : B-80687EN)”中,可同时参阅该手册。
1.1 作业人员的定义
机器人作业人员的定义如下所示。
- 操作者
进行机器人的电源ON/OFF 操作。
从操作者面板启动机器人程序。
- 编程人员
进行机器人的操作。
在安全栅栏内进行机器人的示教等。
- 维护技术人员 进行机器人的操作。
在安全栅栏内进行机器人的示教等。
进行机器人的维护(修理、调节、更换)作业。
“操作者”不能在安全栅栏内进行作业。
“编程人员”、“维护技术人员”可以在安全栅栏内进行作业。
安全栅栏内的作业,包括搬运、设置、示教、调节、维护等。
要在安全栅栏内进行作业,必须接受过机器人的专业培训。
在进行机器人的操作、编程、维护时,操作者、编程人员、维护技术人员必须注 意安全,至少应穿戴下列物品进行作业。
- 适合于作业内容的工作服
- 安全鞋
- 安全帽
1.2 作业人员的安全
在运用机器人系统时,首先必须确保作业人员的人身安全。在运用系统的过程 中,进入机器人的动作范围是十分危险的。在运用机器人系统之前,务须研究安 全预防措施。
下面列出一般性的注意事项。应采取充分确保作业人员安全的相应措施。
(1) 运用机器人系统的各作业人员,应通过 FANUC 公司主办的培训课程接受培 训。
我公司备有各类培训课程。详情请向我公司的营业部门查询。
(2) 在设备运转之中,即使机器人看上去已经停止,也有可能是因为机器人在等 待启动信号而处在即将动作的状态。即使在这样的状态下,也应该视为机器 人处在操作状态。为了确保作业人员的安全,应当能够以警报灯等的显示或 者响声等来切实告知(作业人员)机器人处在操作之中。
(3) 务须在系统的周围设置安全栅栏和安全门,使得如果不打开安全门,作业人 员就不能够进入安全栅栏内。安全门上应设置互锁开关、安全插销等,以使 作业人员打开安全门时,机器人就会停下。
控制装置在设计上可以连接来自此类互锁开关等的信号。通过此信号,当安全门打开时,可使机器人急停。
有关连接方法,请参阅图1.2(b)。
(4) 外围设备均应连接上适当的地线(A 类、B 类、C 类、D 类)。
(5) 应尽可能将外围设备设置在机器人的动作范围之外。
(6) 应在地板上画上线条等来标清机器人的动作范围,使得操作者弄清包括机器 人上配备的机械手等刀具在内的机器人的动作范围。
(7) 应在地板上设置垫片开关或安装上光电开关,以便当作业人员将要进入机器 人的动作范围时,通过蜂鸣器和光等发出警报,使机器人停下,由此来确保 作业人员的安全。
(8) 应根据需要,设置一把锁,使得负责操作的作业人员以外者,不能接通机器 人的电源。
控制装置上所使用的断路器,可以通过上锁来禁止通电。
(9) 在单个进行外围设备的调试时,务须断开机器人的电源后再执行。
图1.2(a) 安全栅栏和安全门
E-stop board
FENCE1 FENCE11
图1.2(b) 安全栅栏信号的连接图
注释)FENCE1,FENCE11 配置在安装在机柜内的急停单元上的印刷电路板的端子台上。
门开启时动作的联锁开关以及安全插销
1.2.1 操作者的安全
操作者,是指在日常运转中对机器人系统的电源进行ON/OFF 操作,或通过操作 面板等执行机器人程序的启动操作的人员。
操作者无权进行安全栅栏内的作业。
(1) 应在安全栅栏外进行机器人系统的操作。
(2) 不需要操作机器人时,应断开机器人控制装置的电源,或者在按下急停按钮 的状态下进行作业。
(3) 应在操作者伸手可及之处设置急停按钮。
机器人控制装置在设计上可以连接外部急停按钮。通过该连接,在按下外部急停按钮的情形下就可以使机 器人急停。有关连接,请参阅图1.2.1。
E-stop board
EMGIN1 EMGIN11
图1.2.1 外部急停按钮的连接图
1.2.2 编程人员的安全
在进行机器人的示教作业时,某些情况下需要进入机器人的动作范围内。编程人 员尤其要注意安全。
(1) 在不需要进入机器人的动作范围的情形下,务须在机器人的动作范围外进行 作业。
(2) 在进行示教作业之前,应确认机器人或者外围设备没有处在危险的状态并没 有异常。
(3) 在迫不得已的情况下需要进入机器人的动作范围内进行示教作业时,应事先 确认安全装置(如急停按钮、示教操作盘的紧急时自动停机开关等)的场所 和状态等。
(4) 编程人员应特别注意,勿使其他人员进入机器人的动作范围。
我公司的示教操作盘上,除了急停按钮外还预先设有紧急时自动停机开关。其动作根据下列情况而定。
(1)急停按钮:只要按下急停按钮,机器人就会急停。
(2)紧急时自动停机开关:其动作根据有效/无效开关的状态而不同。
(a)有效时:手从紧急时自动停机开关松开时机器人就急停 (b)无效时:紧急时自动停机开关无效
控制装置通过将示教操作盘有效/无效开关设为有效,并握持紧急时自通停机开关这一双重动作,来判断 操作者将要进行示教操作。操作者应确认机器人在此状态下可以动作,并在排除危险的状态下负责进行作 业。
使机器人执行起动操作的信号,在示教操作盘、外围设备接口上各有一个,但是这些信号的有效性根据示 教操作盘的有效/无效开关、软件上的遥控状态设定,可以按照如下方式进行切换。
示教操作盘 有效/无效
软件遥控状态 示教操作盘 外围设备
有效 不依存 可以启动 不可启动 本地 不可启动 不可启动 无效
远程 不可启动 可以启动
(5) 在程序结束后,务须按照下列步骤执行测试运转。
(a) 在低速下,在一个步骤至少执行一个循环。
(b) 在低速下,通过连续运转至少执行一个循环。
(c) 在中速下,通过连续运转执行一个循环,确认没有发生由于时滞等而引 起的异常。
(d) 在运转速度下,通过连续运转执行一个循环,确认可以顺畅地进行自动 运行。
(e) 通过上面的测试运转确认程序没有差错,然后在自动运行下执行程序。
1.2.3 维修技术人员的安全
为了确保维修技术人员的安全,应充分注意下列事项。
(1) 在机器人运转过程中切勿进入机器人的动作范围内。
(2) 应尽可能在断开控制装置的电源的状态下进行维修作业。应根据需要用锁等 来锁住主断路器,以使其他人员不能接通电源。
(3) 在通电中因迫不得已的情况而需要进入机器人的动作范围内时,应在按下操 作面板或者示教操作盘的急停按扭后再入内。此外,作业人员应挂上“正在 进行维修作业”的标牌,提醒其他人员不要随意操作机器人。
(4) 在进行气动系统的分离时,应在释放供应压力的状态下进行。
(5) 在进行维修作业之前,应确认机器人或者外围设备没有处在危险的状态并没 有异常。
(6) 当机器人的动作范围内有人时,切勿执行自动运转。
(7) 在墙壁和器具等旁边进行作业时,或者几个作业人员相互接近时,应注意不 要堵住其它作业人员的逃生通道。
(8) 当机器人上备有刀具时,以及除了机器人外还有传送带等可动器具时,应充 分注意这些装置的运动。
(9) 作业时应在操作面板的旁边配置一名熟悉机器人系统且能够察觉危险的人 员,使其处在任何时候都可以按下急停按钮的状态。
(10) 在更换部件或重新组装时,应注意避免异物的粘附或者异物的混入。
(11) 在检修控制装置内部时,如要触摸到单元、印刷电路板等上,为了预防触电,
务须先断开控制装置的主断路器的电源,而后再进行作业。
(12) 更换部件务须使用我公司指定的部件。
特别是保险丝等如果使用额定值不同者,不仅会导致控制装置内部的部件损 坏,而且还可能引发火灾,因此,切勿使用此类保险丝。
(13) 维修作业结束后重新启动机器人系统时,应事先充分确认机器人动作范围内 是否有人,机器人和外围设备是否有异常。
1.3 刀具、外围设备的安全
1.3.1 有关程序的注意事项
(1) 为检测出危险状态,应使用极限开关等检测设备。根据该检测设备的信号,
视需要停止机器人。
(2) 当其他机器人和外围设备出现异常时,即使该机器人没有异常,也应采取相 应的措施,如停下机器人等。
(3) 如果是机器人和外围设备同步运转的系统,特别要注意避免相互之间的干 涉。
(4) 为了能够从机器人把握系统内所有设备的状态,可以使机器人和外围设备互 锁,并根据需要停止机器人的运转。
1.3.2 机构上的注意事项
(1) 机器人系统应保持整洁,并应在不会受到油、水、尘埃等影响的环境下使用。
(2) 应使用极限开关和机械性制动器,对机器人的操作进行限制,以避免机器人 与外围设备和刀具之间相互碰撞。
1.4 机器人机构部的安全
1.4.1 操作时的注意事项
(1) 通过慢速进给(JOG)操作来操作机器人时,不管在什么样的情况下,作业 人员也都应以迅速应对的速度进行操作。
(2) 在实际按下慢速进给(JOG)键之前,事先应充分掌握按下该键机器人会进 行什么样的动作。
1.4.2 有关程序的注意事项
(1) 在多台机器人的动作范围相互重叠等时,应充分注意避免机器人相互之间的 干涉。
(2) 务须对机器人的操作程序设定好规定的作业原点,创建一个从作业原点开始 并在作业原点结束的程序,使得从外边看也能够看清机器人的作业是否已经 结束。
1.4.3 机构上的注意事项
(1) 机器人的动作范围内应保持整洁,并应在不会受到油、水、尘埃等影响的环 境下使用。
1.5 末端执行器的安全
1.5.1 有关程序的注意事项
(1) 在对各类传动装置(气压、水压、电气性)进行控制时,在发出控制指令后,
应充分考虑其到实际动作之前的时间差,进行具有一定伸缩余地的控制。
(2) 应在末端执行器上设置一个极限开关,一边监控末端执行器的状态,一边进 行控制。
1.6 警告标记
(1) 禁止脚踩标记
图1.6(a) 禁止脚踩标记
内容
不要将脚搭放在机器人上,或爬到其上面。这样不仅会给机器人造成不 良影响,而且还有可能因为作业人员踩空而受伤。
(2) 注意高温标记
图1.6(b) 注意高温标记
内容
贴有此标记处会发热,应予注意。在发热的状态下因不得已而非触摸设 备不可时,应准备好耐热手套等保护用具。
(3) 注意高压标记
图1.6(c) 注意高压标记
内容
贴有此标记处有高压部分。
在进行作业时,为了预防触电,应先断开控制装置的电源,并使断路器 处在断开的状态,之后再进行作业。
此外,伺服电机等在断开电源之后,有的部位仍然会在一定时间内持续 高压状态,应予注意。
目录
为安全使用 ... s-1 前言 ...p-1 安全预防措施
1 安全预防措施 ... i
1.1作业人员的定义
...ii 1.2作业人员的安全
...iii 1.2.1 操作者的安全...v 1.2.2 编程人员的安全...vi 1.2.3 维修技术人员的安全... vii 1.3刀具、外围设备的安全
...viii 1.3.1 有关程序的注意事项... viii 1.3.2 机构上的注意事项... viii 1.4机器人机构部的安全
...ix 1.4.1 操作时的注意事项...ix 1.4.2 有关程序的注意事项...ix 1.4.3 机构上的注意事项...ix 1.5末端执行器的安全
... x 1.5.1 有关程序的注意事项...x 1.6警告标记
...xiⅠ.维修篇
1 概要 ... 3
2 结构 ... 4
2.1控制装置的外观
... 5 2.2构成单元的功能
... 10 2.3预防性维修
... 113 故障追踪 ... 12
3.1不能接通电源
... 13 3.1.1 示教操作盘接不通电源时...14 3.1.2 示教操作盘保持初始画面状态而没有变化时...15 3.2报警发生画面
... 16 3.3安全信号
... 20 3.4调校
... 213.6
基于保险丝的故障追踪
... 92 3.7基于
LED 的故障追踪... 96 3.8返回参考点(位置调整)中发现位置偏移
... 104 3.9不能进行手动操作
... 1054 印刷电路板 ... 106
4.1主板(A20B-8200-0470, A20B-8200-0471) ... 107
4.2急停板(A20B-2004-0340)... 110
4.3后面板(A20B-8101-0580)... 111
4.4处理
I/O 板 MA(A20B-2004-0380) ... 112 4.5 I/O 连接器变换板(A20B-2004-0410) ... 1135 伺服放大器 ... 114
5.1伺服放大器的
LED... 115 5.2伺服放大器的设定
... 1166 设定电源 ... 117
6.1电源的方框图
... 118 6.2确认电源
... 1197 更换单元 ... 120
7.1更换印刷电路板
... 121 7.1.1 更换后面板(单元)...122 7.1.2 更换主板...123 7.2更换主板上的卡及模块
... 124 7.3更换再生电阻单元和管线过滤器
... 128 7.4更换急停单元
... 131 7.5更换伺服放大器
... 132 7.6更换示教操作盘和
i Pendant ... 134 7.7更换控制部风扇电机
... 135 7.8更换
AC 风扇单元 ... 136 7.8.1 更换热交换器及柜门风扇单元...136 7.9更换保险丝
... 138 7.9.1 更换伺服放大器的保险丝...138 7.9.2 更换主板的保险丝...139 7.9.3 更换急停板的保险丝...140 7.10更换继电器
... 141 7.10.1 更换急停板的继电器...141Ⅱ.连接篇
1 概要 ... 147 2 方框图 ... 148 3 机器间的连接 ... 149
3.1机器间的连接
... 150 3.2 FANUC I/O Link ... 152 3.2.1 I/O Link 连接 ...152 3.2.2 连接I/O Link 电缆 ...153 3.3外部电缆引接图
... 156 3.3.1 机器人连接电缆...156 3.3.2 示教操作盘电缆...158 3.3.3 连接输入电源...159 3.3.4 连接外部急停...160 3.3.5 连接附加轴制动器(CRR65 A/B) ...169 3.3.6 连接附加轴超程(CRM68) ...1704 外围设备、末端执行器接口 ... 171
4.1外围设备接口的方框图、规格
... 173 4.1.1 主板的情形(CRMA15, CRMA16)...173 4.1.2 处理I/O 板 MA 的情形...174 4.1.3 I/O 连接器变换板的情形 ...175 4.2主板的信号
... 176 4.3连接外围设备和控制装置
... 178 4.3.1 连接主板(CRMA15,CRMA16)和外围设备...178 4.3.2 连接处理I/O 板 MA 和外围设备...185 4.3.3 连接I/O 连接器变换板和外围设备 ...188 4.4连接机构部和末端执行器
... 189 4.4.1 连接LR Mate 200iC 和末端执行器 ...189
4.4.2 连接ARC Mate 100iC, M-10iA 和末端执行器 ...191 4.5数字输入/输出信号规格
... 193 4.5.1 外围设备接口的数字输入/输出信号规格...193 4.5.2 末端执行器控制接口的数字输入/输出信号规格...196 4.6外围设备电缆的规格
... 1984.6.1 外围设备接口A1 用电缆(CRMA15;Tyco 电子放大器 40 插脚) ...198
4.6.2 外围设备接口A2 用电缆(CRMA16;Tyco 电子放大器 40 插脚) ...198
4.6.3 外围设备接口B1, B2 用电缆 (CRMA52;Tyco 电子放大器 30 插脚)...199
4.7
连接外围设备、末端执行器连接电缆
... 200 4.7.1 外围设备电缆...200 4.7.2 外围设备电缆用连接器...2014.8
通信设备的连接
... 205 4.8.1 RS-232-C 接口...2054.8.1.1 接口 ... 205 4.8.1.2 RS-232-C 接口信号名称 ... 206 4.8.1.3 RS-232-C 接口与 I/O 设备之间的连接 ... 207
4.8.2 以太网接口...2094.8.2.1 连接至以太网 ... 210 4.8.2.2 10/100BASE-T 连接器(CD38A)插脚排列 ... 211 4.8.2.3 连接电缆 ... 211 4.8.2.4 电缆线材 ... 212 4.8.2.5 连接器规格 ... 214 4.8.2.6 电缆的线夹和屏蔽处理 ... 214 4.8.2.7 网络的接地 ... 215
5 搬运和安装 ... 217
5.1搬运方法
... 217 5.2安装
... 218 5.2.1 安装方法...218 5.3安装条件
... 220 5.4安装时的调整和确认项目
... 221 5.5安装时的超程、急停的解除方法
... 222 5.5.1 外围设备接口的处理...222 5.5.2 超程的解除方法...222 5.5.3 使机械手断裂无效(有效)的方法...223 5.5.4 使气压异常(PPABN)无效(有效)的方法 ...223附录
A 综合连接图... 227
1 概要
本说明书就用于机器人R-30iA Mate 控制装置(下称“R-30iA Mate”)的维修、
连接进行描述。
维修篇:故障排除方法、单元的设定、调节和更换方法
连接篇: R-30iA Mate 和机器人机构部、外围设备的连接方法、以及控制装置 的安装方法
注意
在进入机器人的动作范围时,应断开控制装置的电源,或者按下操作面 板、示教操作盘上的急停按扭。
2 结构
2.1 控制装置的外观
外观和元件,因受控的机器人、各类选件的指定、应用而存在一定的差异。
图2.1 (a) 中示出 R-30iA Mate 的外观。
图2.1 (b) 中示出 R-30iA Mate 内部部件安装图。
图2.1 (c) 中示出操作面板的外观。
图2.1 (d) 中示出接口面板的外观。
图2.1(a) R-30iA Mate 的外观 R-30iA Mate 控制装置
示教操作盘电缆 操作面板
风扇电机 接口面板
示教操作盘
(LR Mate 200iC) (ARC Mate 100iC, M-10iA) 示教操作盘
急停按钮
作动开关
急停单元 主板
急停按钮
伺服放大器
热交换器
断路器
处理I/O 或者连接器变换板(选项)
再生电阻单元 管线过滤器
风扇单元
图2.1(c) 操作面板的外观
急停按钮 断路器
PCMCIA
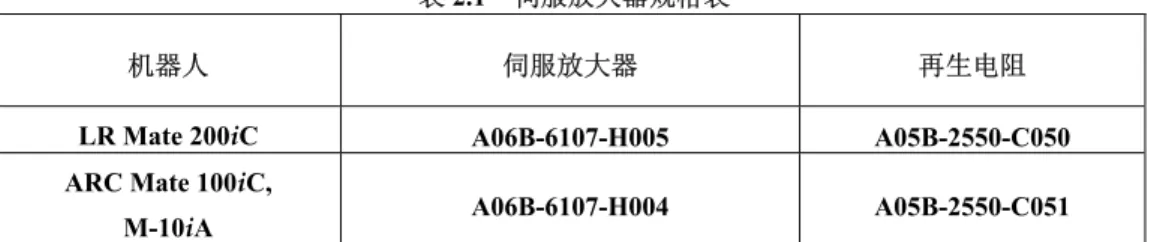
表2.1 伺服放大器规格表
机器人 伺服放大器 再生电阻
LR Mate 200iC A06B-6107-H005 A05B-2550-C050 ARC Mate 100iC,
M-10iA A06B-6107-H004 A05B-2550-C051
图2.1 (e) R-30iA Mate 方框图
断路器 AC输入 三相外围设备 外围设备 示教操作盘 外部急停 机器人
操作面板 再生电阻
伺服放大器 (6轴放大器)
风扇
风扇板主板
后面板 管线过滤 器
急停单元 (仅限ARC Mate100iC, M-10iA用机柜)
200V系列三相脉冲编码器信号/机器人DI/DO信号 电机功率、制动功率
开关
伺服信号(FSSB) I/O Link、示教操作盘信号
存储卡
电池 200V系列三相 EMG信号 24VDC
24VDC
24VDC EMG 信号
2.2 构成单元的功能
· 主板
主板上安装有微处理器及其外围电路、存储器、以及操作箱控制电路。此外,
主板还进行伺服系统的位置控制。
· 急停板、MCC 单元
急停板、MCC 单元用来对急停系统、伺服放大器的电磁接触器以及预备充 电进行控制。
· 后面板
后面板上安装有各类控制板。
· 示教操作盘
包括机器人的编程作业在内的所有作业,都通过此示教操作盘进行操作。另 外,示教操作盘还通过LCD(液晶显示屏)进行控制装置的状态、数据等的 显示。
· 伺服放大器
伺服放大器进行伺服电机的控制、脉冲编码器信号的接收、制动器控制、超 程、机械手断裂等方面的控制。
· 操作面板
操作面板上安装有断路器和急停按钮。
· 断路器
在由于控制装置内部的电气系统异常、或者输入电源异常而流过强电流时,
为了保护设备,输入电源连接于断路器。
· 热交换器
热交换器用来冷却控制装置内部。
· 再生电阻
再生电阻作为用来释放伺服电机的反电动势而连接于伺服放大器上。
2.3 预防性维修
通过进行日常检修、定期检修、以及定期维修,可以将机器人的性能保持在长期 稳定的状态。
(1) 日常检修
在每天进行系统的运转时,对各部位进行清洁和维修,同时检查各部位有无 龟裂或损坏,并就下事项,随时进行检修。
(a) 运转前
确认示教操作盘连接电缆是否有过度的扭曲。确认控制装置以及外围设 备是否有异常。
(b) 运转后
在运转结束时,使机器人返回到适当的位置,并切断控制装置的电源。
在进行各部位的清洁的同时,确认是否有龟裂或损坏。当控制装置的通 风口上粘附有大量灰尘时,应将灰尘擦掉。
(2) 1 个月检修
确认风扇是否正常转动。当风扇上粘附有大量的灰尘等杂质时,按照(3)中所 示的6 个月检修进行清洁。
(3) 6 个月检修
清除机柜内部的灰尘。擦掉粘附在风扇上面的灰尘。
(4) 电池日常检修
参照7.11 项,每 4 年更换一次存储器备份用电池。
(5) 维修用器具
作为维修用器具,建议用户准备好下列器具。
(a) 测定器
交流/直流电压计(有时需要用上数字电压表。)
示波器(频带在5MHz 以上,双通道)
(b) 工具
十字槽螺丝起子 大、中、小 一字槽螺丝起子 大、中、小 套管螺丝起子 大、中、小 钢丝钳
扁嘴钳 钳子
3 故障追踪
作为发生报警时的主要原因,本章特别针对起因于硬件的报警,按不同的错误代 码就检查方法和处理办法进行描述。若是针对程序等的报警,应参照操作说明书 解除报警。
3.1 不能接通电源
检查和处置 图
(检查1) 确认断路器电源已经接通。或者确认断路 器没有处在跳闸状态。
(处置) 接通断路器。
断路器
3.1.1 示教操作盘接不通电源时
检查和处置 图
(检查1) 确认示教操作盘的 LCD 的显示、LED 的 点亮情况。
LCD 上没有显示,且 LED 没有点亮时
· 确认急停印刷电路板上的保险丝 FUSE1 是否熔断。保险丝已经熔断 时,急停板上的LED(红色)点亮。
保险丝已经熔断时,进行(处置1),
更换保险丝。
· 急停印刷电路板上的保险丝FUSE1 没有熔断时,进行(处置2)。
(处置1) (a) 检查示教操作盘电缆是否有异常,如 有需要则予以更换。
(b) 检查示教操作盘是否有异常,如有需 要则予以更换。
(c) 更换急停板。
(处置2) 主板上的 LED 没有点亮时,更换急停板。
主板上的LED 点亮时,进行(处置 1)。
教示操作盤
FUSE1
FUSE2
LED(红色)
3.1.2 示教操作盘保持初始画面状态而没有变化时
检查和处置 图
(检查1) 确认主板上的状态显示 LED 和7段 LED。
(处置) 根据 LED 的状态采取对策。详情请参阅
“基于主板的LED 的故障追踪”项。
(检查2) (检查2)中主板的 LED 没有点亮时,检查 主板上的FUSE1是否已经熔断。
(a)已经熔断时 参照(处置1)。
(b)没有熔断时 参照(处置2)。
(处置1) (a)更换后面板。
(b)更换主板。
(c)选项插槽上安装有选项板时,更换选项 板。
(处置2) (a)更换急停单元。
(b)更换主板与急停单元之间的电缆。
(c)更换(处置 1)中所示的板。
7 段 LED 和状态显示 LED 的位置
(主板上)
后面板
主板
选项插槽 FUSE1
3.2 报警发生画面
报警发生画面上仅显示出当前发生的报警。通过报警解除输入而成为非报警状态 时,报警发生画面上会显示出“PAUSE or more serious alarm has not occurred.”
(暂停或未发生异常报警)。
此画面上显示出最后的报警解除输入后发生的报警,因此,在报警履历画面上通 过按下CLEAR(清除)键(+SHIFT),也可以删除显示在报警发生画面上的 报警。
严重程度显示PAUSE 以上的报警。不显示 WARN、NONE、复位。有时,也可 以通过$ER NOHIS 等系统变量,显示出 PAUSE 以上的报警。
当同时发生多个报警时,按照最新发生的顺序显示。
显示行数最多为100 行。
具有原因代码的报警,在下一行显示出原因代码。
报警履历画面显示
按下F3 HIST 按下F3 ACTIVE
报警发生画面显示
按下ALARM 键 根 据 报 警 发 生 情 况 进 行自动显示
按下画面选择键,选择
“4 ALARM”
图3.2 报警发生画面和报警履历画面的显示步骤
报警发生/报警履历/报警详细信息的显示步骤
1 按下MENUS(画面选择)键,显示出画面菜单。
2 选择“4 ALARM”(报警)。出现报警发生画面。
但是,在发生报警时,会自动显示出报警发生画面。
报警详细代码
3 要显示报警履历画面,按下F3“HIST”(履历)。
当再按一次F3“ACTIVE”(发生)时,则返回到报警发生画面。
注释
对于最新发生的报警,赋予编号1。要显示出无法在画面上全部显示出 的信息时,按下F5“HELP”(详细),并按下右箭头键。
4 要显示报警详细画面,按下F5“HELP”。
5 要返回报警履历画面,按下PREV(返回)键。
PREV
6 要删除所有的报警履历,一边按SHIFT(位移)键,一边按 F4“CLEAR”
(清除)。
CLEAR HELP
SHIFT F4
注释
当系统变量$ER NOHIS = 1 时,不记录基于 NONE 报警、WARN 报警 的报警履历。当$ER NOHIS = 2 时,不记录在复位报警履历中。当$ER NOHIS = 3 时,不将复位和 WARN 报警、NONE 报警记录到报警履历 中。
下面示出用来确认报警时所需的示教操作盘的按键操作。
报警:HIST F3 HIST
F1[TYPE]
报警:Active F1[TYPE]
4 ALARM
F3 ACTIVE F1[TYPE]
DETAIL Alarm F5 HELP
F4 CLEAR
F3 ACTIVE F1[TYPE]
F5 DETAIL F4 CLEAR
3.3 安全信号
安全信号画面显示出与安全相关的信号的状态。画面上,以ON 或 OFF 来显示 各安全信号当前的状态。需要注意的是,不能从该画面改变安全信号的状态。
表3.3 安全信号
安全信号 说明
操作面板急停 表示操作面板的急停按钮的状态。当按下急停按钮时,显示为“TRUE”。
示教操作盘急停 表示示教操作盘的急停按钮的状态。当按下急停按钮时,显示为“TRUE”。
外部急停 表示外部急停信号的状态。当输入外部急停信号时,显示为“TRUE”。
栅栏打开 表示安全栅栏的状态。当打开安全栅栏时,显示为“TRUE”。
紧急时自动停机开关 表示是否将示教操作盘上的紧急时自动停机开关把持在适当位置。在示教操作盘有效时将 紧急时自动停机开关把持在适当位置时,显示为“TRUE”。在示教操作盘有效时松开或 握紧紧急时自动停机开关,就发生报警,并断开伺服装置的电源。
示教操作盘有效 表示示教操作盘是有效还是无效。当示教操作盘有效时,显示为“TRUE”。
机械手断裂 表示机械手的安全接头的状态。当机械手与工件等相互干涉,安全接头开启时,显示为
“TRUE”。此时,发生报警,伺服装置的电源断开。
机器人超程 表示机器人当前所处的位置是否超过操作范围。当机器人各关节内的任何一个超过超程开 关并越出动作范围时,显示为“TRUE”。此时,发生报警,伺服装置的电源断开。
气压异常 表示气压的状态。将气压异常信号连接到气压传感器上使用。当气压在允许值以下时,显 示为“TRUE”。
安全信号画面的显示步骤
1 按下MENUS(画面选择)键,显示出画面菜单。
2 选择下页的“4 STATUS”(状态)。
3 按下F1 [TYPE](画面),显示出画面切换菜单。
4 选择“Safety Signal”(安全信号)。显示出安全信号画面。
SYSTEM Safety JOINT 30%
SIGNAL NAME STATUS 1/11
1 SOP E-Stop: FALSE 2 TP E-stop: FALSE 3 Ext E-Stop: FALSE 4 Fence Open: FALSE 5 TP Deadman: TRUE 6 TP Enable: TRUE 7 Hand Broken: FALSE 8 Over Travel: FALSE
9 Low Air Alarm: FALSE [TYPE]
3.4 调校
在下列两种情形下,需要进行调校。
① 发生 SRVO-062 BZAL alarm(伺服-062 BZAL 报警)、或者 SRVO-038 Pulse mismatch(伺服-038 脉冲计数不匹配)报警时
② 更换了脉冲编码器时
在①的情况下,需要进行简易调校;在②的情况下,需要进行零度位置调校或夹 具位置调校。
(零度位置控制调校只是一种应急性的措施,应在事后进行夹具位置控制)
下面列出调校步骤。有关详情,就夹具位置调校以外的调校步骤,请参阅机构部 操作说明书。
有关夹具位置调校的步骤,请向我公司洽询。
条件
■ 系统变量$MASTER ENB 应等于 1 或等于 2。
SYSTEM Variables JOINT 10%
57/136 57 $MASTER_ENB 1
步骤
下面作为一个例子列出夹具位置调校的步骤。
1 按下MENUS(画面选择)键,显示出画面菜单。
2 按下“0 NEXT”(下一页),选择“6 SYSTEM”(系统)。
3 按下F1“TYPE”(画面),显示出画面切换菜单。
4 选择“Master/Cal”(位置调整)。出现位置调整画面。
F1 Master / TYPE
SYSTEM Master/Cal JOINT 30%
1 FIXTURE POSITION MASTER 2 ZERO POSITION MASTER 3 QUICK MASTER 4 SINGLE AXIS MASTER 5 SET QUICK MASTER REF 6 CALIBRATE
Press 'ENTER' or number key to select.
[TYPE] LOAD RES_PCA DONE 5 POSITION
6 SYSTEM 7 MENUS
9
0 -- NEXT --
5 在JOG 方式下移动机器人,使其成为调校姿势。如有需要,通过手动制动 解除来解除制动器控制。
6 选择“1 FIXTURE POSITION MASTER”(夹具位置调校),按下 F4“YES”
(确定)。
F4
SYSTEM Master/Cal JOINT 30 % 1 FIXTURE POSITION MASTER 2 ZERO POSITION MASTER 3 QUICK MASTER 4 SINGLE AXIS MASTER 5 SET QUICK MASTER REF 6 CALIBRATE Robot Mastered! Mastering Data:
<0> <11808249> <38767856>
<9873638> <122000309> <2000319>
[ TYPE ] LOAD RES_PCA DONE
SYSTEM Master/Cal
1 FIXTURE POSITION MASTER 2 ZERO POSITION MASTER Master at master position?
[NO]
ENTER
Master at master position?
[ ]
[ TYPE ] YES NO
7 选择“6 CALIBRATE”(位置调整),按下 F4“YES”。进行位置调整。
或者重新接通电源,同样也进行位置调整。
在重新接通电源时,始终进行位置调整。
F4
SYSTEM Master/Cal JOINT 30 % 1 FIXTURE POSITION MASTER 2 ZERO POSITION MASTER 3 QUICK MASTER 4 SINGLE AXIS MASTER 5 SET QUICK MASTER REF 6 CALIBRATE Robot Calibrated! Cur Jnt Ang(deg):
<10.000> <-25.000> <40.000>
<5.000> <-15.000> <0.000>
[ TYPE ] LOAD RES_PCA DONE 5 SET QUICK MASTER REF
6 CALIBRATE Calibrate? [NO] ENTER
Calibrate? [NO]
[ TYPE ] YES
F5
DONE
8 在位置调整结束后,按下F5“DONE”(结束)。
3.5 基于错误代码的故障追踪
SRVO - 001 Operator panel E-stop
[现象] 按下了操作面板的急停按扭。
[对策1]解除操作面板的急停按钮。
[对策2]确认急停板(CRT23)和急停按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策3]确认急停板(CRS33)和示教操作盘之间的电缆是否断线,如果断线,则更换电缆。
[对策4]如果在急停解除状态下接点没有导通,则是急停按钮的故障。逐一更换开关或操作面板。
[对策5]更换示教操作盘。
[对策6]更换急停板。
在采取对策7之前,完成控制部的所有程序和设定内容的备份。
[对策7]更换主板。
(注释) 急停单元的LED(红色)点亮时,有可能保险丝已经熔断。采取与3.6(3)相同的对策。
(急停板) (主板)
CRS33 CRT23
急停按钮
SRVO - 002 Teach pendant E-stop
[现象] 按下了示教操作盘的急停按钮。
[对策1]解除示教操作盘的急停按钮。
[对策2]更换示教操作盘。
SRVO - 003 Deadman switch released
[现象] 在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。或者用力按下了紧急时自动停机开关。
[对策1]确认示教操作盘的紧急时自动急停开关的中立位置。
[对策2]确认示教操作盘的作动开关处在正确位置。
[对策3]更换示教操作盘。
[对策4]更换急停板。
[对策5]更换主板。
作动开关 紧急时自动停机开关
示教操作盘 急停板 急停按钮
SRVO - 004 Fence open
[现象] 在自动运转方式下,打开了连接于急停板上的安全栅栏接点。
端子台TBOP9 FENCE1与FENCE11之间
[对策1]连接有安全栅栏时,关上安全栅栏。
[对策2] 检查急停板上的端子台间(TBOP9的FENCE1与FENCE11之间)所连接的电缆和开关。
[对策3] 没有使用安全栅栏信号时,使急停板上的端子台TBOP9的FENCE1与FENCE11之间)短路。
[对策4] 更换急停板。
(注释) 急停单元的LED(红色)点亮时,有可能保险丝已经熔断。采取与3.6(3)相同的对策。
急停板
警告
使用安全栅栏信号的系统,使TBOP9 的 FENCE1 与 FENCE11 之间短 路,并使本信号无效将会十分危险,切勿如此行之。当需要暂时使其形成 短路并动作时,必须另行采取相应的安全对策。
TBOP9
FENCE1 FENCE11
SRVO - 005 Robot overtravel
[现象] 越出了机器人的各轴和各方向的硬件的极限开关。
出厂时,为了便于包装,在超程状态下出厂。
不使用超程信号时,有时也在机械端将其设定为无效。
[对策1]1) 在超程解除画面[System OT release](解除系统超程)上解除超程轴。
2) 一边按SHIFT键,一边按下报警解除按钮,解除报警。
3) 手不要松开SHIFT键,在慢速进给下使超程轴运行到可动范围内。
[对策2]更换极限开关。
[对策3]确认伺服放大器的保险丝(FS2)。
同时发生SRVO-214 FUSE BLOWN(伺服-214 保险丝熔断)报警时,说明保险丝(FS2)已经熔断。在排除 保险丝熔断的原因后,更换保险丝。
[对策4]确认末端执行器连接器。
[对策5]更换伺服放大器。
[对策6]就机器人基座RP1连接器,确认下列项目。
1) 阳连接或阴连接的插脚上是否有扭曲或松弛?
2) 连接器是否切实连接?
然后确认伺服放大器的CRF8连接器和CRM68连接器是否切实连接?
此外,确认RP1电缆没有异常,且没有断线和显眼的扭曲。
进一步检查机器人连接电缆(RP1)、机械内部电缆,并确认是否有断线和接地故障。
(注释) 出厂时,为了便于包装,在超程状态下出厂。
不使用超程信号时,有时也在机械端将其设定为无效。
连接器(CRF8)
连接器(CRM68)
FS2
伺服放大器 伺服放大器
SRVO - 006 Hand broken
[现象] 使用安全接头时,说明安全接头已经折断。安全接头折断时,说明机器人连接电缆内的HBK信号断线或有接地 故障。
如果没有使用机械手断裂信号,有时也将软件的设定设为无效。
(关于使机械手断裂信号无效的方法,参阅维修说明书II. 连接篇 5.5.3项。)
[对策1]一边按SHIFT键,一边按下报警解除按钮,解除报警。手不要松开SHIFT键,在慢速进给下使刀具移动到作业 场所。
1) 更换安全接头。
2) 检查电缆。
[对策2]更换伺服放大器。
[对策3]就机器人底座RP1连接器,确认下列项目。
1) 阳连接或阴连接的插脚上是否有扭曲或松弛?
2) 连接器是否切实连接?
然后确认伺服放大器的CRF8连接器已经切实连接。此外,确认机器人连接电缆(RP1)电缆没有异常,且没有 断线和显眼的扭曲。检查机器人连接电缆(RP1)、机械内部电缆,并确认是否有断线和接地故障。
(注释) 如果没有使用机械手断裂信号,有时也将软件设定设为无效。(关于使机械手断裂信号无效的方法,参阅维修 说明书II. 连接篇 5.5.3项。)
连接器(CRF8)
连接器(CRM68)
FS2
伺服放大器 伺服放大器
SRVO - 007 External emergency stops
[现象] 打开了连接于急停板的端子台上的外部急停接点。
端子台TBOP9 EMGIN1与EMGIN11之间
[对策1]连接有外部急停按钮时,解除按钮。
[对策2]检查急停板的端子台间(TBOP9的EMGIN1与EMGIN11之间)所连接的电缆和开关。
[对策3]没有使用本信号时,使急停板上的端子台(TBOP9的EMGIN1与EMGIN11之间)短路。
[对策4]更换急停板。
(注释) 急停单元的LED(红色)点亮时,有可能保险丝已经熔断。采取与3.6(3)相同的对策。
急停板
警告
使用外部急停按钮的系统,使TBOP9 的 EMGIN1 与 EMGIN11 之间短路,
并使本信号无效将会十分危险,切勿如此行之。当需要暂时使其形成短路 并动作时,必须另行采取相应的安全对策。
EMGIN1 EMGIN11
TBOP9
SRVO - 009 Pneumatic pressure abnormal
[现象] 检测出气压异常。输入信号在机器人的末端执行器上。参阅各机器人的说明书。
[对策1]当检测出气压异常时,检查导致异常的原因。
[对策2]确认末端执行器连接器。
[对策3]检查机器人连接电缆(RP1),如果有接地故障或短路,则予以更换。
[对策4]更换伺服放大器。
[对策5]更换机器人内部电缆。
(注释) 气压异常的输入信号在末端执行器上。参阅各机器人的说明书。
伺服放大器
SRVO - 014 Fan motor abnormal
[现象] 后面板单元的风扇电机异常。
[对策1]更换后面板单元的风扇。
[对策2]更换风扇板。
在采取对策3之前,完成控制部的所有程序和设定内容的备份。
[对策3]更换主板。
风扇电机
主板
SRVO - 015 SYSTEM OVER HEAT (Group:i Axis:j)
[现象] 控制装置内的温度高于规定值。
[对策1]当周围温度高于规定值(45℃)时,使用冷气机等来降低周围温度。
[对策2]风扇电机尚未操作时,检查风扇电机以及风扇电机的连接电缆,或予以更换。
在采取对策3之前,完成控制单元的所有程序和设定内容的备份。
[对策3]更换主板。(可能是因为主板上的恒温器不良。)
主板 热交换器
风扇单元 风扇单元(背面)
(ARC Mate 100iC, M-10 iA 的情形)
SRVO - 018 Brake abnormal (Group:i Axis:j)
[现象] 制动器电流过大。伺服放大器上的LED(SVALM)点亮。
故障诊断
[对策1]检查机器人连接电缆(RM1),确认机构部内部电缆,如果有接地故障或形成了短路,则予以更换。
[对策2]确认制动器连接器(CRM88)是否已妥善连接。
[对策3]更换伺服放大器。
注意
制动器解除单元(选项)的ON/OFF开关处在ON的状态下,操作者试 图执行机器人的JOG 操作时,会发生此错误。要解除错误,将制动器解除 单元置于OFF,重新接通控制装置的电源。
伺服放大器
SRVO - 021 SRDY off (Group:i Axis:j)
[现象] 当HRDY接通时,虽然没有其他发生报警的原因,SRDY却处在断开状态。
(所谓HRDY,就是主机相对伺服装置传递接通还是断开伺服放大器的电磁接触器的信号。SRDY是伺服装置相 对主机传递伺服放大器的电磁接触器是否已经接通的信号。
虽然试图接通伺服放大器的电磁接触器但电磁接触器接不通,通常是由于伺服放大器发出报警,如果检测出伺 服放大器的报警,主机侧就不会发出此报警(SRDY断开)。也即,此报警表示虽然找不出原因但电磁接触器 接不通的情况。)
[对策1]确认急停单元CRMA43、CRMA46、伺服放大器CRMA43是否切实连接。
[对策2]存在着电源瞬时断开的可能性。确认是否存在电源的瞬时断开。
[对策3]更换急停单元。
[对策4]更换伺服放大器。
主板 伺服放大器
急停单元
SRVO - 022 SRDY on (Group:i Axis:j)
[现象] 试图接通HRDY时,SRDY已经处在接通状态。
(所谓HRDY,就是主机相对伺服装置传递接通还是断开伺服放大器的电磁接触器的信号。SRDY是伺服装置 相对于主机传递伺服放大器的电磁接触器是否已经接通的信号。)
[对策1]更换与报警信息对应的伺服放大器。
主板 伺服放大器
急停单元
SRVO - 023 Stop error excess (Group:i Axis:j)
[现象] 停止时的伺服装置位置偏差值异常大。
通过离合器响声和振动确认制动器是否已经开启。
当制动器尚未开启时
[对策1]如果制动器尚未开启,确认机器人连接电缆、机器人内部电缆的制动器电缆是否断线。
[对策2]如果没有断线,则更换伺服放大器或者电机。
当制动器已经开启时
[对策1]确认是否有阻碍机器人或附加轴的该轴操作之情形。
[对策2]确认伺服放大器的CNJ1A~CNJ6的连接器已经切实连接。
[对策3]确认机器人连接电缆、机器人内部电缆的动力线是否断线。
[对策4]检查负载是否超过额定值,如果超过额定值,应将负载调到额定值之内。当负载过大时,加速、减速等所需的 转矩就会超出电机所能发挥的极限值。此外,在进行超过负载的操作时,也会导致不能跟随指令,并发出此报 警。
[对策5]确认控制装置的输入电源处在额定值之内,且没有缺相。此外,确认至伺服放大器的三相输入的各相之间的电 压(连接器CRR38A),若在AC210V以下,确认输入电源电压。(供向伺服放大器的输入电压较低时,能够 输出的转矩将会减弱。因此,也会导致电机不能跟随指令而发生此报警。)
[对策6]更换伺服放大器。
[对策7]更换报警轴的电机。
<补充说明>
如果没有正确设定软件的制动器编号,则会导致停止时误差过大。
伺服放大器
SRVO - 024 Move error excess (Group:i Axis:j)
[现象] 移动时的伺服装置位置偏差量超过规定值($PARAM GROOP.$MOVER OFFST或$PARAM GROUP.$SELF _ERLIM)。
当机器人不跟随程序中所指定的速度等时,会产生误差。
[对策1]采取与SRVO-023相同的对策。
SRVO - 027 Robot not mastered (Group:i)
[现象] 试图进行校准,但是机器人尚未完成调校。
[对策] 按照操作说明书,进行调校。
警告:位置数据偏位时,会导致机器人、附加轴的异常动作,这种情形十分危险。
SRVO - 030 Brake on hold (Group:i)
[现象] 将暂停报警功能($SCR.$BRKHOLD ENB=1)设为有效时,暂停时就会有报警发生。不使用此功能时,将该 设定设为无效。
[对策] 将一般事项设定画面上的[6 General Setting Items](设定-一般事项)的[Servo–off in temporary halt]
(暂停中的伺服关闭)设为无效。
SRVO - 033 Robot not calibrated (Group:i)
[现象] 试图设定用于简易调校的参考点,但是尚未完成位置调整(校准)。
[对策] 进行位置调整。
1. 接通电源。
2. 在位置调整画面[6 SYSTEM-Master/Cal](系统-位置调整)上进行[CALIBRATE](位置调整)。
SRVO - 034 Ref pos not set (Group:i)
[现象] 试图进行简易调校,但是尚未设定参考点。
[对策] 在位置调整画面上,设定简易调校的参考点。
SRVO - 036 Inpos time over (Group:i Axis:j)
[现象] 即使已经超过到位监视时间($PARAM GROUP.$INPOS TIME),也尚未到位($PARAM GROUP.$STOP TOL)。
[对策] 采取与停止时误差过大(SRVO-023)相同的对策。
SRVO - 037 IMSTP input (Group:i)
[现象] 输入了外围设备I/O的*IMSTP信号。
[对策] 接通*IMSTP信号。
SRVO - 038 Pulse mismatch (Group:i Axis:j)
[现象] 电源断开时的脉冲计数和电源接通时的脉冲计数不同。在更换脉冲编码器之后或者在更换脉冲编码器的备份用 电池之后发出此报警。
此外,在将备份用数据读到主板中时发出此报警。
确认报警履历画面,按照下面的不同情形进行检查。
[对策1]对不带制动器的电机设定了带有制动器时,有时会发生此报警。确认附加轴的设定是否正确。
[对策2]在电源断开中通过制动器解除单元改变了姿势时,或者恢复主板的备份数据时,会发生此报警,应重新执行该 轴的控制。
[对策3]在电源断开中由于制动器的故障而改变了姿势时,会发生此报警。在消除导致报警的原因后,重新执行该轴的 调校。
[对策4]在更换脉冲编码器后,重新执行该轴的调校。
(主板)
主板
轴控制卡
SRVO - 042 MCAL alarm (Group:i Axis:j)
[现象] 此为电磁接触器的熔敷检测报警。试图接通电磁接触器时,在接点已经处在接通的状态下,就会发生报警。检 测应在发生接点熔敷后至试图接通电磁接触器时进行。
[对策1]更换急停单元。
[对策2]更换伺服放大器。
伺服放大器
急停单元