國立臺灣大學生農學院生物環境系統工程學系 碩士論文
Department of Bioenvironmental Systems Engineering College of Bioresources and Agriculture
National Taiwan University master thesis
應用同折射率材料與粒子追蹤測速技術探討非破碎駐 波水流型態對淺瀨棲地之影響
Investigating the effect of unbroken standing waves on riffles using RIM materials and PIV
吳世正
Shih-Cheng Wu
指導教授:吳富春 Advisor:Fu-Chun Wu
中華民國 一○二 年 七 月
July, 2013
中文摘要
本文的研究目的在於探討非「破碎型駐波水流型態(unbroken standing wave)」
對淺瀨棲地的影響。前輩學者研究河川底下礫石中的流場時,一般假設推動礫石 間河川與地下水間交互作用的壓力差是來自水流通過不平整的河川底床地形或形 貌所造成的壓力差。不過,因為無法直接測量底床內的流場,所以過去的研究主 要是利用觀測液體濃度變化的方式,來推論自由液面流與孔隙介質間交換流量,
間接驗證壓力差來源。
有別於過往的推論,筆者在可利用水流型態(flow type)進行河川棲地分類的 脈絡下,提出另一種假設:淺瀨區域的表面波(非破碎型駐波)為震盪型水躍(undular hydraulic jump),此震盪型水躍會在底床表面產生壓力變化,可作為自由液面與孔 隙間液體交換的驅力。為驗證此假設,以能夠直接測量液體在孔隙間的流場的「同 折射率材料」與「粒子追蹤測速技術」作為實驗方法,並透過時間平均的
Navier-Stokes 方程計算近床區的壓力變化,最後再以線性管流網絡模式解釋壓力變 化對孔隙介質流的影響。
透過實驗,可發現震盪型水躍底下存在穩定的液體交換結構,再以
Navier-Stokes 方程進行流場分析,顯示液體會在高壓區進入孔隙介質,並在低壓區 回到自由液面流。管流網絡模式亦說明分析所得的壓力分布,足以產生液體交換 結構,驗證了先前的假設。這個假設的成立,顯示以非破碎型駐波作為淺瀨的分 類方法具有物理意義。
關鍵字:非破碎型駐波、淺瀨、震盪型水躍、粒子追蹤測速、同折射率材料
Abstracts
This study investigates the effect of unbroken standing waves on riffles. In the previous studies, the researchers believe that exchange of hyporheic zone caused by the pressure difference because of different fluvial morphological and bed form. Because they can’t measure the fluid velocity field inside sediment bed directly, they use concentration change to study the exchange flow rate between surface flow and porous medium flow.
Newson & Newson (2000) believe the biotopes can be classified according to the flow types on the surface of river. We suppose unbroken standing wave on riffles are undular hydraulic jump and a pressure variation under the waves is drivers of fluid exchange between surface flow and porous medium flow. In order to prove this thought, we use Refractive Index Matching (RIM) materials and Particle Tracking Velocimetry (PTV) technique to set up a experiment to measure the velocity field in porous medium under undular hydraulic jump.
According to our research, we find out there are a stable downwelling fluxes upwelling fluxes on porous medium surface. We calculate the pressure distribution on porous medium surface by using time-average Navier-Stokes eqns. and find out up and down welling fluxes are corresponding to low and high pressure zone. The velocity field in porous medium also can be simulated by our Pipe Flow Network Analysis model.
Keywords:unbroken standing wave、riffle、undular hydraulic jump、Particle Tracking Velocimetry(PTV)、Refractive Index Matching(RIM) materials
目 錄
中文摘要………...i
英文摘要………..ii
目錄……….iii
圖目錄……….iv
表目錄………....vii
符號表………...viii 第一章 前言………...1-1 1.1 研究動機 ………...1-1 1.2 背景介紹 ………...1-2 1.3 文獻回顧 ………...1-4 1.4 論文架構 ………...1-9 第二章 研究方法………...2-1 2.1 實驗材料 ………...2-1 2.2 實驗設置 ………...2-3 2.3 實驗步驟 ………..2-10 2.4 實驗項目 ……….2-12 2.5 粒子追蹤測速 ……….…2-13 2.5.1 粒子追蹤測速原理 ………. 2-13 2.5.2 自由液面流速量測驗證 ………...2-21 2.5.3 孔隙間流速測量驗證 ………...2-25 第三章 結果與討論
……….3-1
3.1 自由液面流各組流場之測量結果 ………..3-4 3.2 孔隙間流場 …………..………..3-11 3.3 壓力推估 ………3-20 3.4 管流網絡模式 ………3-40 3.5 對於棲地復育應用之啟示 ………....3-53 第四章 結論與建議………4-1
4.1 結論 ………...4-1.4.2 建議 ………..…4-3 參考文獻 ………5-1
圖目錄
圖 1-1 桶後調查區域圖……….1-1 圖 1-2 桶後調查區段位置(google map)……….……….1-2 圖 1-3 桶後調查區域圖(局部) ……….1-2 圖 1-4 調查區內水面與底床高程變化……….1-3 圖 1-5 桶後溪調查區段水面波……….…1-6 圖 1-6 不同類型的水躍示意圖(White, 1998)……….…………..…..1-8 圖 2-1 同折射率材質示範……….…2-1 圖 2-2 循環水槽示意圖……….…2-3 圖 2-3 顆粒排列規則……….…2-4 圖 2-4 輔助波浪板……….…2-4 圖 2-5 第二層壓克力球排列狀態……….…2-5 圖 2-6 流量計與尾水板……….……2-6 圖 2-7 可旋轉升降的四軸……….……2-6 圖 2-8 高功率雷射……….……2-7 圖 2-9 掃描裝置與光纖……….……2-7 圖 2-10 掃描範圍示意圖……….…..2-8 圖 2-11 掃描影像與 y 座標匹配方法示意圖……….……..2-9 圖 2-12 高速攝影機………...2-9 圖 2-13 實驗變數圖………...2-12 圖 2-14 率定示意圖………...2-13 圖 2-15 旋轉與平移後的空間座標………...2-14 圖 2-16 率定示範圖………...2-15 圖 2-17 亮點捕捉示意圖………...2-15 圖 2-18 Path-Tracking 說明圖(陳彥呈,2008)………....………...2-17 圖 2-19a) 以 Exp01,y=5/16D 切面為例,顯示孔隙間流場細部流場圖:舉例範 圍………...2-19 圖 2-19b) 以 Exp01,y=5/16D 切面為例,顯示孔隙間流場細部流場圖:細部流
場………...2-19 圖 2-19c) 以 1mm×1mm 格網所算出的 x 方向流速 u………...2-20 圖 2-19d) 將流場格網調整成 0.25mm×0.25mm….………..……...2-20 圖 2-19e) 將 xy 切頁格網從 1mm×0.25mm 調整成 0.25mm×0.25mm…...,2-21 圖 2-20 LDA 測量原理(Dantec Dynamics,Inc 提供)……….…...2-22 圖 2-21 自由液面驗證實驗設置圖………..………..……….…....2-22 圖 2-22 Flow Explorer LDA system(Dantec Dynamics,Inc 提供)…….…...2-23 圖 2-23 粒子追蹤測速法與 LDA 測量值..………..………..…….…....2-23 圖 2-24 LDA 與粒子追蹤測速法所測到的原始資料………….…..…….…....2-24
圖 2-25 孔隙間流速測量驗證圖………….…..……….….…....2-26 圖 3-1 空間座標說明圖………….…..……….….………3-1 圖 3-2 全域合成速度流場圖(Exp01).……….………3-2 圖 3-3 長時間曝光圖(Exp01)………….…..……….….…....,3-3 圖 3-4 Exp01 之切面………….…..……….….…...3-4 圖 3-5 Exp01 各切面之合成速度……….…..……….….…...3-4 圖 3-6 Exp02 之切面………….…..……….….…...3-6 圖 3-7 Exp02 各切面之合成速度……….…..……….….…...3-6 圖 3-8 Exp03 之切面………….…..……….….…...3-8 圖 3-9 Exp03 各切面之合成速度……….…..……….….…...3-8 圖 3-10 Lennon & Hill(2006)所觀測到的水躍結構……….….…...3-10 圖 3-11 Exp01 孔隙間不同 xz 切頁 x 方向的流速(以向下游為正)…...3-11 圖 3-12 Exp01 孔隙間不同 xz 切頁 z 方向的流速(以向上為正)…...3-12 圖 3-13 Exp01 孔隙間不同 yz 切頁 x 方向的流速(以向下游為正)…...3-13 圖 3-14 Exp01 孔隙間不同 xy 切頁 z 方向的流速(以向上為正)…...3-14 圖 3-15 空間週期平均法…...3-15 圖 3-16 Exp01 空間週期平均流場...3-16 圖 3-17 Exp02 空間週期平均流場...3-17 圖 3-18 Exp03 空間週期平均流場...3-18 圖 3-19 傅立葉轉換圖…...3-23 圖 3-20 變數u�,w�之分布(Exp01)... ...3-25 圖 3-21 Pconvx, Pconvy,Pgx, Pvis之分布(Exp01)...3-26 圖 3-22 u����,u′u′ �����空間分布(Exp01)...3-28 ′w′ 圖 3-23 中 u���� 與 P′u′ Rex 沿 x 方向之變化圖(Exp01)...3-28 圖 3-24 u����� 沿 x 方向之變化圖(Exp01)...3-29 ′w′ 圖 3-25 震盪型水躍波峰下 Reynolds Stress(−ρu������) 之分布(Lennon & Hill, ′w′
2006)。...3-30
圖 3-26 總壓力與水利頭分布(Exp01)...3-31 圖 3-27 波形與對照位置(上:Exp02,下:Exp03)...3-32 圖 3-28 變數u�,w� 之分布(上:Exp02,下:Exp03)...3-33 圖 3-29 Pconvx, Pconvy,Pgx, Pvis之分布(上:Exp02,下:Exp03)...3-34 圖 3-30 u’u’�����,u’w�����’結構空間分布(上兩張:Exp02,下兩張:
Exp03)...3-35 圖 3-31 u����� 與 P′u′ Rex 沿 x 方向之變化圖(上:Exp02,下:Exp03)...3-36 圖 3-32 u������ 沿 x 方向之變化圖(上:Exp02,下:Exp03)...3-37 ′w′ 圖 3-33 總壓力與水利水頭分布(上:Exp02,下:Exp03)...3-38 圖 3-34 左 管路類型(A)...3-39
圖 3-34 下 孔隙間上游往下游視圖...3-41 圖 3-35 左 管路類型(B)...3-41 圖 3-35 下 上方俯視顆粒圖...3-41 圖 3-36 不同斷面中的管流網絡示意圖(一)...3-43 圖 3-37 不同斷面中的管流網絡示意圖(二)...3-44 圖 3-38 完整的二維網絡圖...3-44 圖 3-39 兩種管流類型流量的計算方法...3-45 圖 3-40 管流模式說明圖...3-45 圖 3-41 節點與管路標號...3-47 圖 3-42 Exp01 實驗所測流量與管流脈絡模式計算出的結果...3-48 圖 3-43 Exp02 實驗所測流量與管流脈絡模式計算出的結果...3-49 圖 3-44 Exp03 實驗所測流量與管流脈絡模式計算出的結果...3-50 圖 3-45 Williams & Hynes(1974)測量顆粒間溶氧隨深度變化圖...3-53 圖 3-46 各層注入流量計算方法示意圖(以 Exp01 為例)...3-54 圖 3-47 三組實驗注入流量與深度之關係圖...3-54 圖 3-48 無因次表層注入流量與無因次壓力變化關係圖...3-56
表目錄
表 1-1 調查區段高程流速與福祿數表………1-3 表 1-2 以表面波類型作為棲地型態分類依據對應表(Newson & Newson,
2000)………..……...1-5 表 1-3 水躍類別分類表(U.S. Bureau of Reclamation, 1995)……….1-7 表 2-1 同折射率液體與固體性質(陳彥呈,2008)...………..……….2-1 表 2-2 實驗的變數表……….…..2-12 表 3-1 各實驗情況所選取的 M 值………...…………..3-24 表 3-2 實驗參數與流體在表層注入流量... ……….3-56
符號表
符號 定義
c 成像中,垂直方向座標。
d 反光顆粒的位移量。
r 成像中橫方向座標。
u x 方向的流速。
uDarcy 達西流速。
w z 方向的流速。
x 順渠道方向,以水躍前水深最淺處為 0。
y 跨渠寬方向,以渠道中央為 0。
z 水深方向,以底床顆粒頂點為 0。
A 空間率定的旋轉矩陣。
Ar 管流網絡模式中,聯立方程式的係數矩陣。
Aw 管流網絡模式中,管路的通水面積。
B 空間率定的平移矩陣。
C 管流網絡模式中,聯立方程式的常數項矩陣。
D 底床顆粒直徑。
Fr 入流福祿數 = U
�gZ0
H 水利水頭,為壓力加上高程。
K 管流網絡模式中,管路的阻抗。
L 管流網絡模式中,管路的濕週長。
M 傅立葉選用的近似階數。
P 壓力。
Pconv 時間平均 Navier-Stokes 方程式中傳導項對壓力的貢獻項,其中又可 分成兩小項Pconvx , Pconvy。
Pconvx 時間平均 Navier-Stokes 方程式中傳導項對壓力貢獻的兩項之一。
Pconvy 時間平均 Navier-Stokes 方程式中傳導項對壓力貢獻的兩項之一。
Pgx 時間平均 Navier-Stokes 方程式中重力對壓力的貢獻項。
Pvis 時間平均 Navier-Stokes 方程式中黏滯力對壓力的貢獻項
PRex 時間平均 Navier-Stokes 方程式中雷諾應力對壓力貢獻的兩項之一。
PRey 時間平均 Navier-Stokes 方程式中雷諾應力對壓力貢獻的兩項之一。
Q 管流網絡模式中,管路中的流量。
Q0 實驗變數流量。
Qin 通過表層進入孔隙間的流量。
ReP 孔隙間的雷諾數。
T 顆粒間 z 方向週期長度,T= √22 D。
U 水躍前入流水深平均流速。
V 合成速度。
X��⃗ 反光顆粒的空間座標。
Z0 水躍前水深最淺處水深。
Z1 水躍後水第一波峰處水深。
δ Path-Tracking 中,預測座標與實際座標間的偏差量。
λ 波長:水躍前水深最淺處水深到水躍後第一個波谷的距離。
μ 液體黏滯係數。
ρ 液體密度。
( )’ 紊流跳動。u = u� + u′。
( )��� 時間平均。
( )� 空間差異值,u� = 〈u�〉 + u�。
第一章 前言 1.1 研究動機
2009 年,筆者首次隨同吳富春老師的研究團隊至桶後溪,進行野外河川生態 調查,認識到此溪屬水源保護區,棲地環境較少受到人為破壞,所測之研究變數 主要為自然影響。調查的區段為一深潭淺瀨變化段,其照片為圖 1-1。
圖 1-1 桶後調查區域圖,其中左側為上游。
在調查過程中,我們使用底棲性昆蟲作為環境生態指標,而底棲性昆蟲大多 棲息於河床底下礫石的背面。經過實際採樣,發現底棲性昆蟲在此區段中,分布 十分不均,大幅度地集中在淺瀨區段。對於這樣的分布,筆者假設存在著某種因 素,本研究將試著回答這個問題。
1.2 背景介紹
為了對底棲性昆蟲的分布現象有 更深的了解,筆者首先對此區域做了一 些參數的調查。該區域位於桶後林間道 10km 處,位於從台北市出發往烏來方 向更深入的地方。地理位置如圖 1-2 所 示。
圖 1-3 桶後調查區域圖(局部),其中左側為上游。
圖 1-3 為生態調查區域之局部圖,雙紅線與綠線相接處為礫石底床的高點,向 下游為淺瀨,向上游綠線則為走向深潭。雙紅線間的範圍是此調查區域中底棲性 昆蟲分布最為密集的地方,所採集到的生物以石蠅、浮游、石蠶蛾幼蟲等台灣常 見的的底棲性昆蟲為主,此雙紅線間礫石底床僅在床面以下數公分內存在較大的 孔隙率,再更深處礫石間的孔隙被細粒徑之顆粒填滿。為了進一步了解影響此分 布的原因,本研究調查以礫石床面的的高點的底床面作為原點,分別向上游沿著
新店
烏來
圖 1-2 桶後調查區段位置(google map)
綠線測 2 點、向下游沿著兩條紅線中間測 8 點,每兩點間隔 2 公尺,調查沿線上 礫石底床高程、礫石底床下被細粒徑填滿之高程、水深、流速等參數。水面高程 與礫石床面高程是利用將水準儀測量,細粒徑高程為在同點將礫石翻開將水準儀 置於細粒徑床面上進行測量;測量結果如下表:
表 1-1 調查區段高程流速與福祿數表
其高程變化繪圖顯示於圖 1-4。從圖中可以看出,水深在此變化由深至淺再變 深,在兩個深水區間存在一礫石砂丘,且此砂丘未被細粒徑填滿透水性較高的厚 度僅佔整體砂丘表面之一層。
圖 1-4 調查區內水面與底床高程變化。
-60 -50 -40 -30 -20 -10 0 10 20
-500 0 500 1000 1500
相對高程
(c m )
離底床最高處距離,向下游為正(cm)
桶後調查區高程圖變化圖 水面高程
底床高程
細粒徑高程
1.3 文獻回顧
從圖 1-4 中可以看出,在礫石床面數公分以下,孔隙就會被細粒徑填滿。
Omesová & Heles�ic (2007) 的研究也指出顆粒間的孔隙率會在 10-20 公分內急速下 降,且底棲性昆蟲大多聚集於底床 0-20 公分內。
關於礫石河床之礫石間液體的流動,亦已有廣泛地研究。Elliott &
Brooks(1997a)、Elliott & Brooks(1997b) 分別以實驗驗證與理論分析,解釋在二維 的情況下若底床存在一三角形的砂丘,則砂丘內的液體將受到砂丘兩側壓力差而 存在一穿透砂丘的流場。Tonina & Buffington (2007) 在實驗室中建立三維的深潭- 淺賴-深潭形貌變化並測量全區段底床的壓力分布,認為不同形貌間的壓力分布,
將引導礫石間的流向。以上研究說明了壓力變化的空間週期與地形變化週期相同,
然而實地進行野外調查後,卻發現礫石孔隙間孔隙率較高、導水性較好的範圍,
僅在表層 10 公分以內,遠小於地形的尺度 20 公尺。因此,欲藉著砂丘兩側的壓 力差,穿透一充滿細粒徑塞滿孔隙的的砂丘,可能只能驅動相當微小的流量。
另一方面,Newson & Newson (2000),提出一套新的分類方法(表 1-2),他 認為河川水面用肉眼可見的表面波,可用以形容不同的物理環境;亦即一棲地的 物理環境,會受不同流況的水流影響,這些流況也會在水面造成差異。在各項定 義中,此研究認為水面波非破碎型駐波(unbroken standing wave)的存在可以用來 定義淺瀨成為一種物理環境。Qian et al (2008) 則建立一套模式將表面波與孔隙介 質流作連結:該研究利用勢能流理論說明表面波的存在會在底床造成非均勻的壓 力分布,並使用線性控制方程式計算出此非均勻的壓力分布對孔隙介質流的流場,
認為表面波的存在足以對孔隙間的生物造成影響。
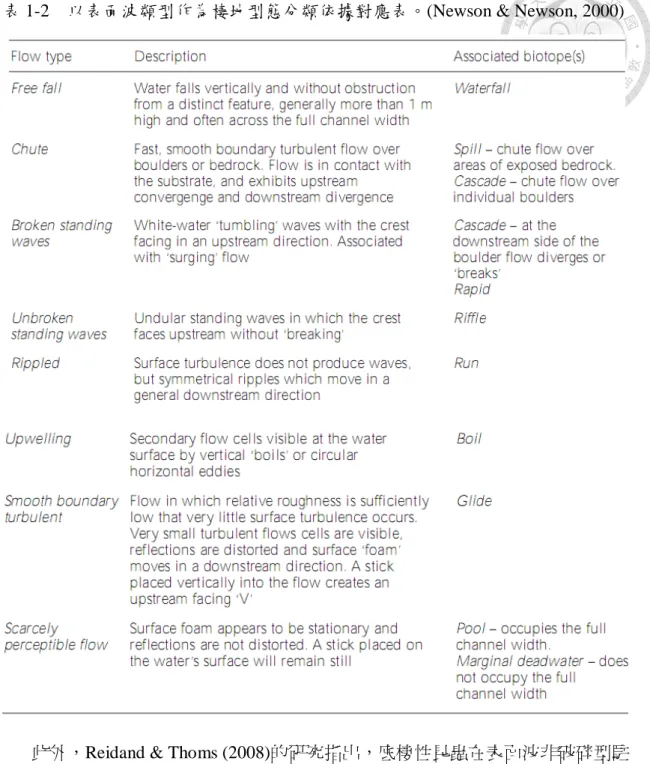
表 1-2 以表面波類型作為棲地型態分類依據對應表。(Newson & Newson, 2000)
此外,Reidand & Thoms (2008)的研究指出,底棲性昆蟲在表面波非破碎型駐 波的範圍內,其數量與多樣性相較於其他表面波的類型都有較好的表現;換言之,
非破碎型駐波的存在,對底棲性昆蟲的棲地可能存在一影響。若此影響存在,則 其壓力分布空間週期尺度將與表面波波長的相同,能對底床造成比較直接的影響。
而在桶後溪的調查段,水面亦滿足非破碎型駐波定義,如圖 1-5。
圖 1-5 桶後溪調查區段水面波。影像以時間平均去除水面跳動,顯示水面確實存 在不隨時間移動的波形。
Newson & Newson 在文章中並無明確說明非破碎型駐波如何形成,透過實地 的野外觀察,發現在淺瀨段形成水面波的原因有以下幾種:
a. 亞臨界流跨過底床突起的礫石後,水深稍微變淺,隨後即回到亞臨界流,在表 面形成震盪。
b. 亞臨界流跨過底床突起的礫石後,水深變淺,流況變成超臨界流隨後產生水躍,
在表面形成震盪。
c. 水流在底床遇到局部坡度較大的區域,流況變成超臨界流隨後產生水躍,在表 面形成震盪。
d. 從上游來的主流,衝擊礫石砂洲,水深變化在水面產生波浪。
e. 在靠岸區,液體漫過礫石,形成以礫石長度為波長的波。
其中 d.e 不符合文獻中之定義:the crest faces upstream。在本研究中,將非破碎型 駐波視為條件 b. 通過一障礙物之後,釋放出位能進而產生水躍。
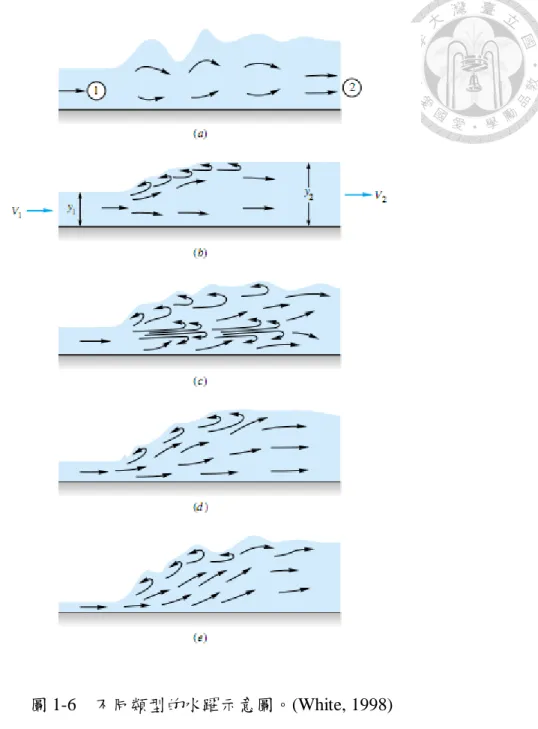
U.S. Bureau of Reclamation (1995) 將水躍依據入流之福祿數進行分類,整理如 表 1-3。在所有的水躍分類中,發現其中震盪型水躍(undular jump)的描述與圖
形跟桶後溪所看到的水面波最為接近(沒有捲氣結構、不會造成水花)亦跟非破 碎型駐波的定義相吻合。筆者認為在淺瀨河段大部分的區域都為亞臨界流,僅在 通過突出礫石後或是通過底床局部坡度較大處,因跌水而得到能量才能在局部成 為超臨界流,隨後又發生震盪型水躍,流體會再回到亞臨界流的狀態。在這種情 況下,因為流體僅在局部的小範圍內維持在超臨界流狀態,以流速計難以在現地 測量超臨界流的流況。另一方面,因為跌水得到的能量仍然有限,震盪型水躍入 流的福祿數在 1 至 1.7 之間,在所有水躍條件中最容易達成,是淺瀨段最可能發生 的水躍類型。因此在本研究中,將障礙物引導的震盪型水躍視為非破碎型駐波,
探討其對孔隙介質流的影響。
表 1-3 水躍類別分類表。(U.S. Bureau of Reclamation, 1995)
名稱 入 流 福
祿數
水深變化 比
y2/y1
特徵
無水躍發生 <1 1 理論上不會發生水躍 震盪型水躍
(undular jump )
1-1.7 1-2 水深隨距離產生震盪但不隨時間 變化。水躍前後水深略增加。如圖 1-6a
弱水躍
(week jump)
1.7-2.5 2-3.1 水 深 穩 定 增 加 並 出 現 捲 氣 結 構
(roller)。如圖 1-6b 擺盪型水躍
(oscillating jump )
2.5-4.5 3.1-5.9 不穩定流況,為一過渡態,會產生 向下游傳遞的波動。如圖 1-6c 穩定水躍
( steady jump)
4.5-9 5.9-12 穩定的流況,不易發生擾動震盪。
如圖 1-6d 強水躍
(strong jump)
>9 >12 發生在入流非常強勁的情況。水面 波濤洶湧。。如圖 1-6e
圖 1-6 不同類型的水躍示意圖。(White, 1998)
至於在測量技術方面,以同折射率與粒子影像分析的方法測量孔隙間流場的 方式頗為成熟,如 Huang et al. (2009) 的實驗便已有效利用粒子追蹤測速法
(Particle Tracking Velocimetry ,PTV)搭配自動化程式計算顆粒間的流場。本研 究即是以此為基礎,試圖透過實驗營造非破碎型駐波的流場,並同時觀測其對孔 隙間流場的影響。
1.4 論文架構
根據前述文獻,筆者推測非破碎型駐波對底棲性昆蟲的棲地應有顯著的影響;
本研究之目的即在了解非破碎型駐波如何對棲地有影響,以及有什麼樣的影響?
以下為本文的論述架構:
首先在第一章表述研究之動機,呈現野外調查的數據,並且說明為何對前人
「以地形造成的壓力差,作為礫石河床孔隙間流場的主要驅動力」在調查區段的 適用性感到質疑,另外提出「以表面波作為驅動力」的可能性。
接著在第二章中,陳述實驗的設計,營造出可同時觀測孔隙介質流與自由液 面流的震盪型水躍,也詳細介紹實驗設備、步驟以及用來分析流場的方法。並以 不同方法,進行同樣的測量,用以驗證本實驗中所用的測量方法的準確性,
第三章則依序介紹三組實驗中所觀測到的自由液面流與孔隙介質流,並提出 自由液面流是驅動孔隙介質流的動力的假設。利用自由液面流已知的流場數據,
計算近床區的壓力分布。再以本研究中的孔隙結構,建立線性的管流脈絡模式,
驗證壓力分布對底床的影響。最後對第三章所發現的結果,與河川棲地做連結。
最後,將於第四章總結全文,呈現本實驗之結論,並對後續的相關研究提出 一些建議。
第二章 研究方法
在本研究中,將非破碎型駐波視為通過一障礙物之後,釋放出位能進而產生 震盪型水躍。實驗中將營造此流況並觀測其自由液面流與孔隙間的流場。
2.1 實驗材料
孔隙間的流場是本研究觀測的重點之一;為了要能在不干擾流場的情況下測 量孔隙間的流場,故本實驗採用同折射率材質並搭配粒子追蹤測速法的方法。首 先,在材質的選擇上使用 Haam et al.(2000)所提出的固體壓克力搭配液體對異丙 基甲苯(Para-Cymeme)。其性質如下表:
表 2-1 同折射率液體與固體性質。(陳彥呈,2008)
性質/材料 對異丙基甲苯 壓克力
比重 0.855 1.19
黏滯力[pa s] 0.001023 n.a.
折射率 1.489 1.49
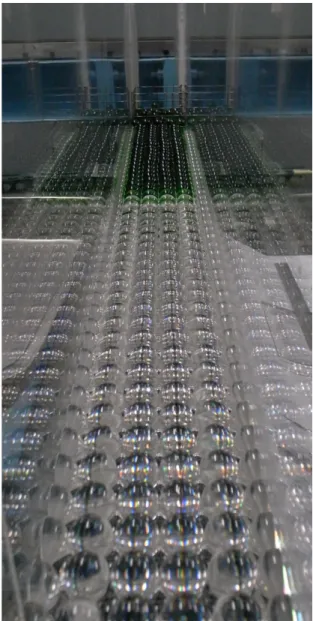
圖 2-1 同折射率材質示範。將液體倒入壓克力的孔隙間之後,因液體與壓克力 同折射率不折射不反射,故看不到液體中的壓克力球。
其中對異丙基甲苯與壓克力,在溫度約 17℃時,折射率最為接近,因此在實驗前 會先將液體冰鎮,以達到最好的效果。而為了追蹤液體流速,本實驗在液體中添 加50μm 的反光顆粒於液體中。在一般情況下,反光顆粒能持續懸浮於液體中,跟 隨液體移動,並反射雷射光。藉由觀測反光顆粒可用以測流液體之流速。
2.2 實驗設置
(1)水槽與顆粒為了滿足同折射率材質搭配粒子追蹤測速法的測量方法,此實驗將從水槽底 部打雷射切頁,以激發反光顆粒;在雷射光打到流體中反光顆粒,並反光至 CCD 的路徑上,都必須滿足同折射率的條件。為達目的,建造一循環且方便從底部打 光、抗對異丙基甲苯侵蝕之壓克力水槽是首要任務。接著在水槽中放入壓克力球,
作為可透水性的底床,並在壓克力球面上放置一原柱障礙物,此原柱障礙物與渠 道同寬,讓流體通過時產生跌水,用以營造一個二維的震盪型水躍。
圖 2-2 循環水槽示意圖
渠道詳細的尺寸如下:渠寬為 8 公分,鋪設底床長 110 公分,其中觀察段為 20 公分,在觀察段上游有 50 公分發展段讓入流穩定。觀察段下游距離尾水版 40 公分降低下游邊界影響。
在粒徑尺寸的選擇上,為避免壓克力球太小以致自由液面流驅動的孔隙不明 顯,以及因壓克力球太大造成斷面方向週期太少,故選用直徑 16mm 的透明壓克 力球。另外,為了方便觀察孔隙間的流場,並且讓每次實驗具有可重複性,於是 採用規則排列的方式。其排列規則如圖 2-3,每層顆粒間緊密接觸,次層再放置於 上一層的凹處,為面心最密堆積,孔隙率約為 26%。在研究區段中,孔隙間未被
細顆粒填滿的深度約為 2-3 倍礫石厚度,所以本實驗壓克力球共鋪設三層,與研究 區段相似。
圖 2-3 顆粒排列規則
為了在不違反影響同折射率的限制下,將顆粒整齊排列在底床上,使用同樣 是壓克力的材質的波浪版如圖 2-4。製作方法為將厚兩公分的壓克力板,以水刀機 切出波浪狀,再利用氫氧焰將水刀切割造成霧狀外圍燒至平滑。
圖 2-4 輔助波浪板。下條是水刀切割的半成品,上條將其再以氫氧焰燒至平滑。
實際顆粒排列狀態如圖 2-5,圖中透明顆粒為觀測區,綠色顆粒為發展區。在 第二層靠牆處,使用直徑 15mm 的壓克力半球,以避免邊界效應影響過大(區域 孔隙率太大,將形成孔隙流的主要通道)。
圖 2-5 第二層壓克力球排列狀態,由下游往上游看。下方為下游,上方為上游。
再者,循環水槽的馬達強度可藉由控制面板控制其輸出功率,據此調整流量,
其最大流量可達 90L/min 以上(流量以流量計測量)。渠道末端有一活動是尾水 板,有調整水位的作用。流量計與尾水板如圖 2-6。另外,渠道可透過調整底部四 個支撐軸,改變渠調坡度與維持平穩。本實驗的坡度固定在 3%,此數值並不超出 野外淺賴段坡度的變化範圍,在實驗中也比較容易營造想要的流況。
圖 2-6 流量計與尾水板
圖 2-7 可旋轉升降的四軸,用以調整、維持坡度。
(2)光源
在影像分析中,為了使液體中的反光顆粒清楚顯像,通常會將環境的亮度降 低,僅以雷射光打在一切頁上,如此也可確保測到的速度具有較高的一致性。本 實驗即是使用 Innova 70C(Coherent ,Int.)作為光源,其最大功率約 5W;主要頻 率 488-514Hz 間,為綠光雷射。實驗時搭配光纖,將雷射光傳導至渠道下方。
圖 2-8 高功率雷射
本研究希望將問題簡化成二維流場,然而為了營造可透水的底床,孔隙介質 間內的空間分布必然是三維分布,切在不同斷面有不同的速度場,因此實驗使用 固定移動速度之軌道,將雷射架於軌道上,使雷射切頁時間移動如圖 2-9。
圖 2-9 掃描裝置與光纖
其掃描的方法如下,先定義座標軸:定義 x 軸為順渠道方向,向下游為正,
且在水躍前水深最淺處 x=0。y 軸為橫跨渠道方向,且渠道正中央為 y=0。z 軸為 水深方向,向上為正,定義顆粒頂為 z=0。本實驗掃描範圍為渠道中央一倍粒徑寬 的範圍,亦即 y = -0.8cm ~0.8 cm 的範圍。如圖 2-10 中紅色實線與綠色實線所夾 之範圍。其中紅色實線為 y = 0.8 cm ,綠色實線為 y =-0.8cm。
拍攝的步驟如下:
1. 將雷射切頁在範圍外預備,如圖 2-10 中藍色的位置。
2. 使用高速攝影機開始存資料。
3. 啟動掃描裝置使雷射切頁沿藍色箭頭方向移動。
4. 當雷射切頁經過綠色實線後停止攝影。
由於高速攝影機能記錄的記憶空間是固定的,後面進來的資料會依序擠掉一 開始拍攝的內容,最後記錄到的內容為雷射從紅色虛線移動至綠色虛線的過程。
虛線實際的位置會依照按「結束攝影」速度快慢而有所改變。每次掃描都必須確 保虛線範圍包含實線範圍。
圖 2-10 掃描範圍示意圖
在後續的分析上,可以從影像中找到在第 a 張影像時通過紅色實線,第 b 張 影像時通過綠色實線。找出第 i 張影像在 y = yi [cm]的關係,其關係式如下:
yi = 0.8 − 1.6
(b − a)(i − a) (2-1)
當雷射切頁通過紅色實線與綠色實線時,雷射切頁與第一、三層顆粒相切會 達到最小,因雷射切頁具有 1mm 寬的厚度,故與第一、三層相切的面積不會為零,
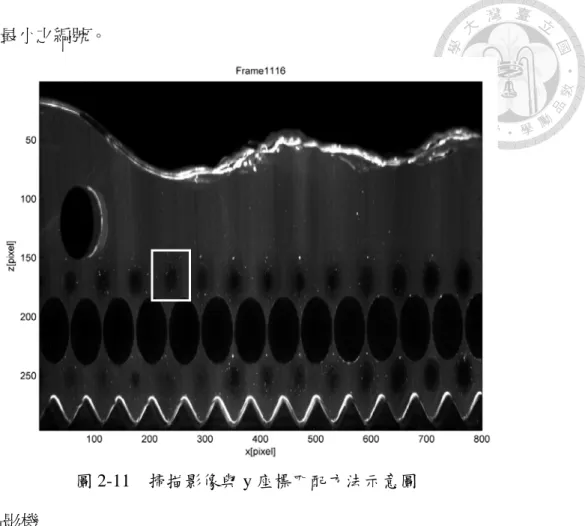
在影像中呈現一黑色圓圈。此黑色圓圈會隨雷射切頁位置改變而有所變動,當雷 射切頁切到顆粒邊緣時,此面積變動最為敏感。在實際情形下,顆粒排列存在些 許擾動,所有顆粒之球心並不會完全在同一平面上,是以在實驗中選定一參考顆 粒,以此顆粒球心作為 y = 0 ,顆粒兩端作為 y = 0.8cm 與 y = -0.8cm 之依據。
圖 2-11 顯示以白色框框所圍之顆粒為參考座標時。在影像編號 1116 前後,雷射切 頁到達 y = 0.8cm。而確切之影像編號,則以程式判斷在影像編號 1116 前後此黑色
y
區域半徑最小之編號。
圖 2-11 掃描影像與 y 座標匹配方法示意圖 (3)高速攝影機
欲利用影像分析測量流速,必須使反光顆粒在相鄰影像中距離相近,那麼便 需要高速攝影機減少兩影像間的時間差,以降低反光顆粒在這時間內的位移。本 實驗使用的工具是 Phantom V4.3 VRI(Vision Research, Inc),其最大像素為 800×600 pixels,拍攝影像為灰階。可連續拍攝 1Gb 的影像。
圖 2-12 高速攝影機
2.3 實驗步驟
a. 準備液體與顆粒
因為液體在低溫環境下,與顆粒的折射率會較為接近,故每次做實驗之前,需 先將其冷卻。而顆粒表面容易吸附毛屑、灰塵、小氣泡、水氣,在實驗前先利 用少量液體潤洗壓克力球,可吸附於壓克力球上的雜質。
b. 排顆粒
為了避免渠道與波浪板間有氣泡殘留,需要先將液體倒入循環水槽中,在低流 量下於渠道放置波浪板,並且小心地排列壓克力球;尤其要注意半球的排放,
必須避免壓克力半球與渠道邊壁間卡住氣泡。
c. 調整流況
接著調整流量與尾水板,以營造適當的流場。
d. 調整攝影環境
啟動雷射儀器,架設光纖將雷射光引導至渠道下方,並調整雷射切頁與渠道平 行。另外要調整掃描裝置以控制雷射切頁移動的速度,以及調整高速攝影機位 置、焦距與光圈大小、曝光時間等。
e. 掃描並拍攝
掃描渠道中央一倍粒徑寬的流場,以高頻率(Exp01 與 Exp02 中使用 600FPS,
Exp03 中使用 500FPS,實驗組別詳細情形請參閱 2.4 節)拍攝自由液面流,又 為有足夠數據可資分析,須重複八次拍攝過程。再以低頻率(300FPS)攝錄孔 隙介質流,同樣重複八次。如此一來,可使每組實驗至少有 20000 個影像。
f. 進行空間率定
在不移動到攝影機的條件下,拍攝率定裝置,以供之後分析時有正確的空間轉 換矩陣。
g. 清洗與整理
液體對異丙基甲苯對壓克力具有侵蝕性,在完成實驗後,須將壓克力球、半球 與波浪板、率定裝置取出並洗淨,去除表面殘留的液體。否則壓克力表面受到
侵蝕會產生小裂紋,影響透光度。接著清除渠道中殘留的液體,避免侵蝕渠道,
再將液體從循環水槽抽出並冷卻,以供下次實驗用。清洗過的壓克力球與半球,
應使用烘箱低溫烘乾,要注意高溫變形的情況與加速水分蒸發降低殘留在顆粒 上的水漬;在顆粒乾糙前,不能進行下一次的實驗。
h. 分析處理資料
在完成以上實驗後,整理所得到的影像與數據並加以分析。
2.4 實驗項目
如圖 2-13,液體由左側往右側流動。實驗水面變化如下,在越過障礙物之後,
流體會加速,水深降低,至Z0達最小值。隨後發生震盪型水躍,水深上升,至Z1達 最大值。隨後反覆進行震盪。取前兩個水面局部最低點間的距離作為波長λ。
圖 2-13 實驗變數圖
本研究將舉以下三組作為震盪型水躍如何影響孔隙間水流的說明,其中 Exp01 與 Exp02 具有相同的流量與坡度,但因為尾水位的不同,而使水面波的震盪有所 差異──Exp02 的波長較短,水面波的震盪較大。而 Exp03 則取與 Exp01、Exp02 差異較大的情況,其流量較小,波長較短,用以探討震盪型水躍的流況隨空間變 化之情形。其中 U 為入流在水身最淺處的水深平均流速,Fr
= U
�
gZ
0。 表 2-2 實驗的變數表流量 [L/min]
Fr Z0[cm] Z1 [cm] Z1- Z0 [cm]
λ[cm] 坡度
Exp01 46.5 1.40 1.43 2.42 0.99 10.1 0.03 Exp02 46.5 1.11 1.75 2.86 1.11 8.73 0.03 Exp03 23.4 1.09 1.20 1.88 0.68 5.4 0.03
Z
0Z
1λ
U
2.5 粒子追蹤測速 2.5.1 粒子追蹤測速原理
在本小節將介紹利用粒子追蹤測速法計算其速度場之原理,分析中所使用到 的程式碼,均為卡艾瑋教授及其研究室所建立、提供。
(1)影像率定
利用影像分析計算速度場,方法為觀測反光顆粒在兩張影像中移動的距離,
計算出其速度。然而,影像會因為拍攝角度造成長度的改變,因此在進行影像分 析前,需要先將影像長度單位 pixel 轉換成真實長度單位,如公分。
在 Spinewine et al(2003)文章中,提供了影像率定的方法,其原理如下:
圖 2-14 率定示意圖。中為已知各點座標的率定裝置,經過攝影機的針孔成像,
映在攝影機的 CCD 上。
已知率定裝置上各點真實座標Xi(xi, yi, zi)與各點於 CCD 上成像於第(ri, ci)畫 素上,則必然存在一旋轉矩陣 A 與平移向量 B 使 XYZ 座標軸旋轉後,新的原點 O’(0,0,0)座落在針孔的位置,而 CCD 被旋轉至k = k0的平面上,如圖 2-15 所示:
圖 2-15 旋轉與平移後的空間座標 而率定裝置上各點被旋轉平移至新座標Xi′(xi′, yi′, zi′),滿足方程式
� xi′ yi′ zi′
� = A �xi yi zi� + B
(2-2)
又率定裝置上的各點與 CCD 上的成像跟 O’共線,
xi′ zi′ = ri
k0 ,
(2-3a) yi′
zi′ = ci
k0
(2-3b) 將(2-2)代入(2-1)整理,得
zi′ k0�ri
ci
1� = A �xi yi zi� + B
(2-4)
其中,A 為 3x3 矩陣,9 個未知數;B 為 3x1 矩陣,3 個未知數。每一個率定 點提供 3 個方程式,增加一個未知數,至少需要 6 個率定點才能解 A、B。又旋轉 後長度不變,故 A 必須滿足的行列式值為 1。多的方程式將依最小平方法迴歸求 解。在計算出 A 與 B 之後,可再代入Xi(xi, yi, zi)算出(r,c)與(ri, ci)進行比較。用
以驗證 A、B 的準確度。
圖 2-16 率定示範圖 (2)自動捕捉反光顆粒
圖 2-17 亮點捕捉示意圖
Matlab 可將一解析度 r × c 的影像,轉成內容為 r × c 階的矩陣,依其影像中 的亮度給予 0 至 255 的數字。使用程式可自動判斷影像中亮度的差異,給予一門 檻值,即可找到反光顆粒的座標。如圖 2-17 所示,左圖為原始的影像,右圖為在
此影像中找到其亮度大於門檻值的亮點。
(3)速度分析
本研究使用 Hung et al. (2009) 中所使用的 Path-Tracking 方式進行速度場的分析。
其運算原理如下所述:
利用上述所說的方法,可得到各個影像中反光顆粒的位置座標。在使用 Path-Tracking 時,需要連續四張影像用來判斷流速。在此引用陳彥呈(2008)的 圖,圖 2-18 用以說明其運算邏輯。在連續四張影像中,捕捉到的反光顆粒位置及 數量如子圖 a、b、c、d 所示,分別以X��⃗m(t=0)、X��⃗i(t=1)、X��⃗j(t=2)、X��⃗n(t=3)表示。以X��⃗i(t=1)為起點,
到 t=2 時,可能的位移如子圖 e 所示。其位移量為:
di,j = X��⃗j(t=2)− X��⃗i(t=1) (2-5)
若其維持同樣的位移量,則可推測三角形到到 t =3 時會出現在子圖 f 的方塊上 X��⃗i,j(+)= X��⃗j(t=2)+ di,j (2-6)
同樣可以反推圓形在 t=0 時會回到子圖 f 中的方塊位置上
X��⃗i,j(−)= X��⃗i(t=1)− di,j (2-7)
在 t=3 裡,在預測的三個X��⃗i,j(+)與四個X��⃗n(t=3),共 12 種匹配裡,找距離最接近者,定 義其為
δi,j(+) = minn (�X��⃗i,j(+)− X��⃗n(t=3)�) (2-8)
圖 2-18 Path-Tracking 說明圖。(陳彥呈,2008)
同理在 t=0 裡,在預測的三個X��⃗i,j(−)與兩個X��⃗m(t=0),共 6 種匹配裡,找距離最接 近者,定義其為
δi,j(−) = minn (�X��⃗i,j(−)− X��⃗m(t=0)�) (2-9)
最後找到所有組合內距離最接近者,如子圖 g 所示,定義其最小距離為
δi,j = minn (δi,j(+) δi,j(−)) (2-10)
藉由尋找最小距離δi,j,可以找到最正確的配對,如圖 2-18 中,藉此決定X��⃗i(t=1)在 下一張影像時將移動到在X��⃗2(t=2)的位置。並得到在 t=1、位置X��⃗i(t=1)處,具有速度為 ui= X��⃗2(t=2)− X��⃗i(t=1)。在 3 維的掃描中,可利用掃描裝置為等速移動的特性,可將 影像的編號,轉換成掃描軸上的位置。在處理完所有影像後,可以得到全部具有 空間位置資訊的速度,再將測量區域切割成三維網格,最後將屬於在同一網格中 的速度進行平均,便可得到代表該格網的速度大小。本實驗將空間掃描的結果分 作為 16 個斷面,計算各斷面平均流速所用的格網,均為長、寬 1mm × 1mm。
(4)孔隙格網細化
用上述的方法可以求得各斷面的流場如圖 2-19 b)。從圖中可以發現,利用粒 子追蹤測速法搭配同折射率材質,可以有效測量本實驗孔隙間的流場。
a)
b)
圖 2-19 以 Exp01,y=5/16D 切面為例,顯示孔隙間流場細部流場圖。
a)舉例範圍。b)細部流場。
以孔隙間的可流動空間結構而言,1mm × 1mm 的格網無法準確描繪壓克力球 面,若降低格網大小來進行分析,又會有資料筆數過少的問題,所以在處理孔隙 間流場時,應先以 1mm × 1mm 的格網算出流場,再以 0.25 mm × 0.25mm 格網描
繪壓克力球面,其方法與步驟如下(以實驗 Exp01 孔隙間 x 方向的流速為例,x 向下游為正):
a. 從影像中找出球心位置座標。
b. 如同自由液面的分析,先將研究段 y 方向寬 16mm 區域分 16 個 xz 切頁,以 1mm
× 1mm 格網計算平均流場。
c. 計算每顆壓克力球在此 xz 切頁中最小之半徑(例如球心在 y=0mm 處,半徑為 8mm 的顆粒在 y = -0.1~0(=9/16D)的 xz 切頁內,最大半徑為 8mm,最小半徑為 √82− 12 ≃ 7.94mm),將此最小半徑視內視為不透水區域。去除不透水處區 域與受底層波浪板反光影響區域之流場。如圖 2-19 c),其中波浪板反光區域大 於實際存在的區域,故在底層壓克力球與波浪板會有些許重疊。
圖 2-19c) 以 1mm × 1mm 格網所算出的 x 方向流速 u
d. 以二維線性內插與外插的方式補足沒有數據的網格,並將格網大小重新調整為 0.25mm × 0.25mm。
圖 2-19d) 將流場格網調整成 0.25mm × 0.25mm
e. 重新將 16 個 xz 切頁的資料中相同 x 的數據整合成一個 yz 切頁,並將每個 xy
切頁中原本 1mm × 0.25 mm 的網格,以二維線性內插與外差的方式,將格網大 小重新調整為 0.25mm × 0.25mm。計算各個壓克力球在此 xy 切頁內之面積,去 除在此 xy 切頁中是壓克力球的區域。
圖 2-19e) 將 xy 切頁格網從 1mm × 0.25mm 調整成 0.25mm × 0.25mm 在格網細化後,可以較為準確的知道通水面積,利用圖 2-19 e)通水面積與 x 方向的流速 u,將有數值區域內代表該格網的的 u 值乘以格網面積 0.25mm × 0.25mm 再全部相加總,就能積分算出離開此平面(往下游)的流量。
2.5.2 自由液面流速量測驗證
除上述「粒子追蹤測速法」之外,另有與之不同測量原理的「LDA(Laser Doppler Anemometer)」,自由液面流流場的驗證須比較兩者測量的結果。
LDA 測量原理如圖 2-20。首先,儀器打出兩道雷射光,對焦於測量點,因雷 射光相互干涉,而形成明暗相間的條紋。接著,反光顆粒通過條紋並發出訊號,
感測器接收訊號之後,儀器自行計算通過兩條紋所發出訊號的時間差,便可得到
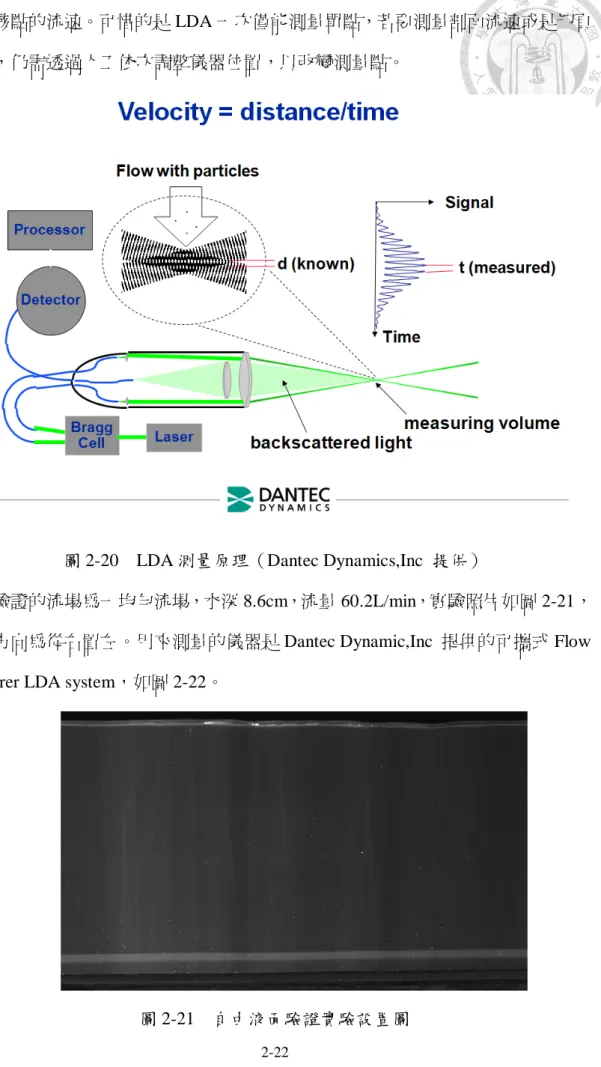
經過該點的流速。可惜的是 LDA 一次僅能測量單點,若要測量剖面流速或是切頁 流速,仍需透過人工依次調整儀器位置,以改變測量點。
圖 2-20 LDA 測量原理(Dantec Dynamics,Inc 提供)
驗證的流場為一均勻流場,水深 8.6cm,流量 60.2L/min,實驗照片如圖 2-21,
流速方向為從右置左。用來測量的儀器是 Dantec Dynamic,Inc 提供的可攜式 Flow Explorer LDA system,如圖 2-22。
圖 2-21 自由液面驗證實驗設置圖
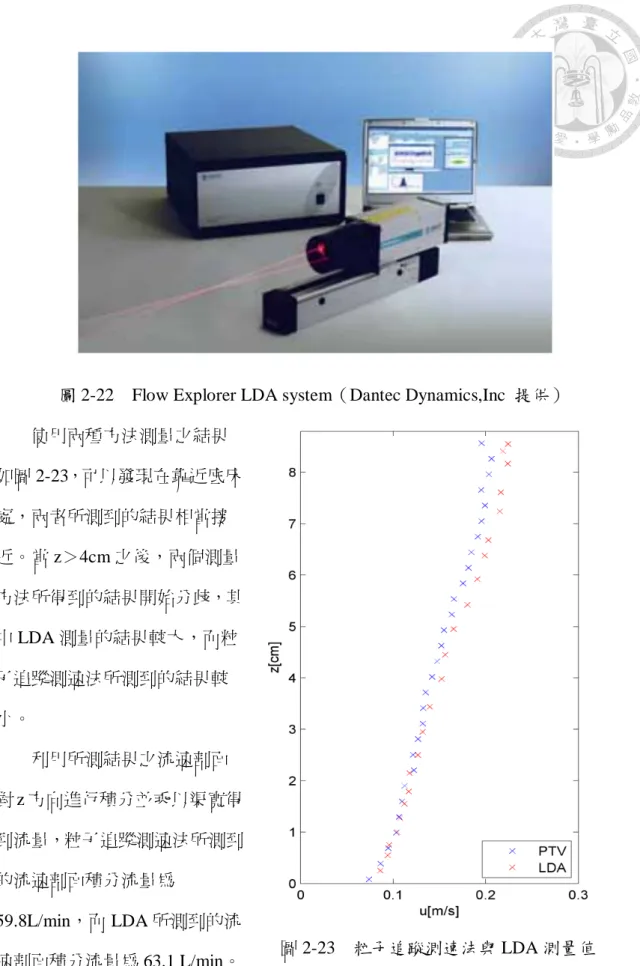
圖 2-22 Flow Explorer LDA system(Dantec Dynamics,Inc 提供)
使用兩種方法測量之結果 如圖 2-23,可以發現在靠近底床 處,兩者所測到的結果相當接 近。當 z>4cm 之後,兩個測量 方法所得到的結果開始分歧,其 中 LDA 測量的結果較大,而粒 子追蹤測速法所測到的結果較 小。
利用所測結果之流速剖面 對 z 方向進行積分並乘以渠寬得 到流量,粒子追蹤測速法所測到 的流速剖面積分流量為
59.8L/min,而 LDA 所測到的流
速剖面積分流量為 63.1 L/min。 圖 2-23 粒子追蹤測速法與 LDA 測量值 將此流量與實測流量進行比較,粒子追蹤測速法所測的數據較為接近,誤差約為 -0.7%,具有相當高的準確性。
為了明白兩種方法所測出的數據何以有異,以下列出 z<4cm 與 z>4cm 兩組 來計算平均速度的原始資料直方圖。由圖 2-24 可以看到,無論在 z = 3.4cm 或 z = 6.4cm ,LDA 所測到的圖形都為左右對稱、中央集中的分布,其中在 z = 6.4 cm 處,疑似因操作不當而使低速區資料被排除、平均流速被高估。粒子追蹤測速法 所測到的結果,在 z = 3.4cm 處,所測到數據 u 在 0.1 ~ 0.15 m/s 有一集中區域,
與 LDA 相符;在 z = 6.4 cm 處測到的數據,則分布於兩個區域中。
試推測相異的原因,可能是在粒子追蹤測速法的測量方法上,需要先在影像 中找到亮點,然而本實驗雷射光從底部打出,在液體面會反射形成亮紋如圖 2-21,
亮紋會隨著水面擾動而移動,且愈近水面影響愈大,近底床影響較小。與亮紋以 相同速度一起前進的反光顆粒,因為持續被照射、反光,它的速度比較容易被偵 測,這可能就是造成 z = 6.4cm 測到兩個群組的原因。
圖 2-24 LDA 與粒子追蹤測速法所測到的原始資料
至於 LDA 在測量上,只測量兩股雷射光聚焦點的速度,此雷射光行進不會經過液
體面,也就不會受到水面反光的影響。另一方面,LDA 所測的資料集中在雷射聚 焦的點上,而粒子追蹤測速法測量的是 1mm ×1mm × 1mm 體積之平均,所以粒子 追蹤測速法所測到的資料分布會較廣。
整體來說,關於自由液面流的測量,LDA 具有較高的準確度,但有無法測量 多點的侷限;粒子追蹤測速法則具有可同時測量整個雷射切頁流場的便利性,雖 不如 LDA 準確卻足可徵信。
2.5.3 孔隙間流速測量驗證
折射率為溫度的函數,壓克力與對異丙基甲苯的折射率最接近的溫度為 17℃,
因此若要使用同折射率介質搭配 LDA 進行測量,就應該將實驗溫度嚴格控制在 17℃,否則當雷射光線通過壓克力球時,些微的折射率差將導致折射,使得 LDA 的兩股雷射像無法對焦。然而在實驗環境必須保持通風與室溫 25℃的環境下,維 持液體溫度在 17℃並不可行,是故孔隙間的流速測量無法以 LDA 進行驗證。
本研究採用的是總流量驗證。利用相同的顆粒排列方式,並在顆粒上加一不 透水蓋子,將液體限制在顆粒間流動,同樣掃描渠道中央一倍粒徑寬的範圍,再 運用上一小節的方法,算出在此一倍粒徑寬的範圍內在各個 x 處(各個 yz 切頁)
往下游的流量。又因為渠寬為 5 倍粒徑寬,再將此計算出的流量乘以 5 倍得到推 算的流量 q,接著跟用量杯實測流量 q0 進行比較,其結果如圖 2-25。由該圖可以 發現誤差可以分為兩個部份:
一是總體的平均誤差。從圖中可以看出,以影像追蹤測速法所算出的流量其 平均值為實測流量的 1.0775 倍,誤差為 7.75%。可能的原因是在厚度 1mm 的雷射 光切頁內速度不一致所導致,在此測量方法中,無法測到不滑動邊界,因此會高 估流速與流量。
圖 2-25 孔隙間流速測量驗證圖。上圖為顆粒的空間分布,下圖為無因次流量的 空間分布。
二是局部的誤差。從圖中可以發現,誤差與空間分布有關,計算出的流量起 伏具有規律性。此誤差跟球的排列方式相關,在圖中球與球的接連處,多為存在 較大誤差的區域,推測其原因與「在球的邊緣,以格網來逼近曲線,造成推估通 水斷面積的誤差」有關。在之後的流量測量上,應盡量避免選用球與球接連處的 資料進行流量計算。
整體來說,此驗證方法為間接的驗證方式,難以確保在掃描範圍外所存在的 流量與掃描範圍內的流量相同,亦無法測出液體是否從橫跨渠寬方向進出掃描範 圍,但在許多不確定因素影響下,又尚未有更好的方法可以測量孔隙介質內的流 量,這一方法依舊提供了一個量化的誤差大小。雖然這一測量方法存在著系統誤 差,若是避免選用球與球相接區域,則有助於降低誤差。
第三章 結果與討論
本章將呈現實驗所測量出的流場,並提出一套模式解釋實驗所觀察到之現象。
各節重點如下:首先呈現自由液面流的流場,接著在第二部份對孔隙間流場進行 分析;第三小節利用自由液面流所測量到的參數,帶入時間平均之 Navier-Stokes 方程推估在近床區域的壓力分布;接著利用第三部份所算出的壓力分布,帶入線 性管流網絡模式與測量到的流場進行比較;最後,根據以上論述結果與調查區域 做連結。
因為本實驗用到空間掃描並將掃描的區域切成 16 等分,圖 3-1 為渠道的俯視 圖。定義空間座標如下:圖中左側為上游,定義 x 軸為順渠道方向(藍色箭頭),
以向下游為正,且在水躍前水深最淺處 x=0。y 軸為橫跨渠道方向(紅色箭頭),
且渠道正中央為 y=0(綠色線)。本實驗掃描範圍為渠道中央一倍粒徑寬的範圍,
亦即 y = -0.8cm ~0.8 cm 的範圍。如圖 3-1 中紫色線與藍色實線所夾之範圍。其 中紫色實線為 y = 0.8 cm ,藍色實線為 y =-0.8cm。z 軸為水深方向,向上為正,
定義顆粒頂為 z=0。
圖 3-1 空間座標說明圖
本實驗營造的流況為自由液面流越過障礙物後,產生跌水變成超臨界流,而 後進行震盪型水躍。實驗流場可見圖 3-2,圖中液體從左側進入拍攝區域,遇到障 礙物(黑色實心圖形)後分作兩路,一路從障礙物上方繞過,並跌水加速發生水 躍在水面產生震盪波紋。另一路則從底下孔隙間繞過障礙物再從孔隙間回到自由 液面流。整體來說,障礙物對實驗在震盪型水躍流場的營造上是必要的存在,用 以加速流體變成超臨界流,但障礙物的存在同時會產生局部效應:如圖 3-2 中因入 流撞倒障礙物,在障礙物下方的孔隙中產生局部加速的流場,以及在自由液面流 的部份,當液體通過障礙物後會產生尾跡渦流。
圖 3-2 全域合成速度流場圖(Exp01)。
作為流況說明,流場的長時間曝光圖則是另一種選擇。圖 3-3 為在兩斷面的長 時間曝光影像圖,曝光時間長度為 1/3 秒。在長時間曝光圖中,白色細線為反光顆 粒的移動軌跡,反光顆粒移動越快則細線顏色越暗,白色細線如果彼此平行,代 表流況越穩定,若彼此相交,則表示區域內受紊流影響程度大。從圖中可以發現,
自由液面流在靠近液面的區域,白色細線彼此平行,然而在波峰底下靠近底床的 區域流線以及在障礙物後方區域白色細線則較為混亂沒有規則,顯示此區域內到 紊流擾動影響較大。詳細的流場結構,將在後續章節陸續介紹。
a)
b)
圖 3-3 長時間曝光圖(Exp01)
a)掃描至第一層顆粒的測端;b)掃描至第一層顆粒的中央。
y = 0.75cm(8/16D)
y = 0.05cm(1/16D)
3.1 自由液面流各組流場之測量結果
本研究之重點放在震盪型水躍對孔隙間的影響,為降低障礙物所造成的局部 影響,故將主要研究區段放在水躍起跳處與顆粒頂部,不同斷面的流場如下:
Exp01
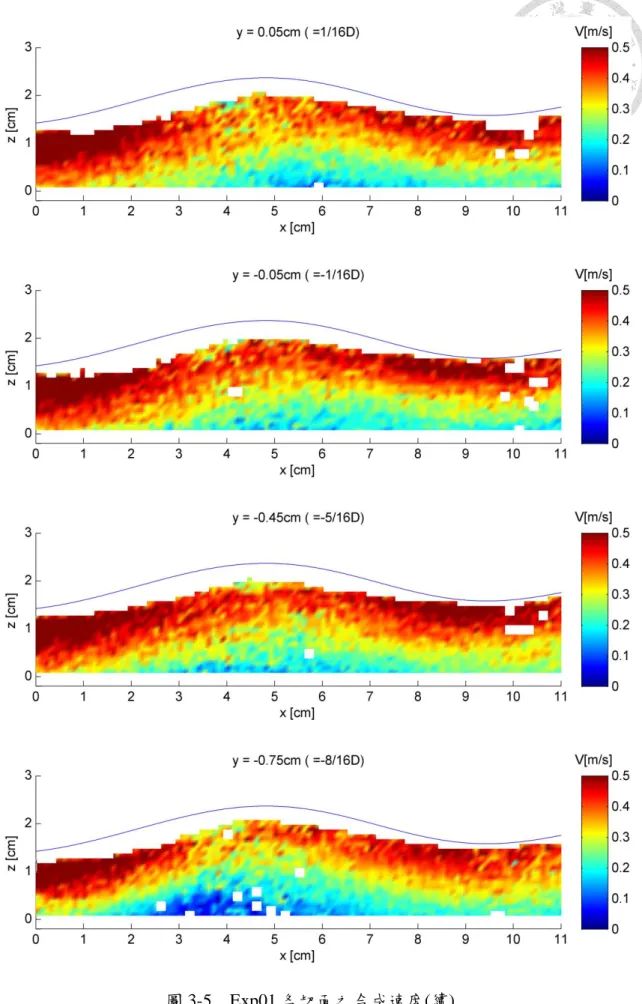
圖 3-4 Exp01 之切面,白色框框為主要研究區段。
圖 3-5 Exp01 各切面之合成速度
y = 0.05cm(1/16D)
圖 3-5 Exp01 各切面之合成速度(續)
Exp02
圖 3-6 Exp02 之切面,白色框框為主要研究區段。
圖 3-7 Exp02 各切面之合成速度
y = 0.05cm(1/16D)
圖 3-7 Exp02 各切面之合成速度(續)
Exp03
圖 3-8 Exp03 之切面,白色框框為主要研究區段。
圖 3-9 Exp03 各切面之合成速度
y = 0.05cm(1/16D)
圖 3-9 Exp03 各切面之合成速度(續)
在各實驗中,水面會略微呈現三維結構,在水面波的波谷處,渠道中央的水 深會比外側淺,在水面波的波峰處,渠道中央的水深會比外側深,圖中水面線的 決定方法為,在波谷處選取受水面波影響最深處,在波峰選取最高值,在其餘地 方則以程式自動判斷最量的位置,在平滑化處理成水面線。
在測量方面,因為雷射光從底下打光,在遇到液體與空氣交界面時會因為不 同的折射率而發生反射,而反射在水面附近的雷射光,在影像分析中會被判斷為 大量相鄰亮點,故無法以粒子追蹤測速法測量其流場。另外圖中零星的空白格為 該格網中資料筆數不足五筆。
在流場結構方面,整體來說,從流場圖可以發現,在波峰底下存在一藍色的 低速區。超臨界流在水躍的過程中,高速主流繞過藍色低速區沿水面流動,並非
快速混合成一新均勻流場。此低速區結構,在 Lennon& Hill(2006)的研究中,也有 被明顯的觀察到,如圖 3-10。
圖 3-10 Lennon & Hill(2006)所觀測到的水躍結構。長度以入流水深無因次、流速 以水躍前平均水深流速無因次。圖 a.b 為福祿數 1.65 的震盪型水躍,圖 c.d 福祿數
為 2.99。
而在比對不同斷面間的流場可以發現,藍色的低速區在外側區(y = 8/16D 與 -8/16D)處較中央區(y = 1/16D 與 -1/16D)要大且略為對稱。推測主要的原因為 外側區為第一層顆粒間的縫隙,此處局部孔隙率較高,從孔隙間進出的流量有助 於藍色低速區的存在。而無法完全對稱的原因為顆粒面達到完全理想的整齊排列,
原柱障礙物兩側存在肉眼無法判別的高度差使渠道必然存在三維因子。
3.2 孔隙間流場
孔隙間流場的測量,是本研究使用同折射率物質技術主要的考量。如果不是 使用同折射率物質則圖 3-10 中 y = 0.55cm(6/16D),壓克力球與球之間的流場則 無法測量。
以下以 Exp01 的測量結果為例展現在不同切頁上的流速。以下各圖中,底下 白色區域為去除底下波浪板反光造成干擾流速的區域,會比實際面積來的大,故 與壓克力球會有部份重疊。圖 3-11 與圖 3-12 為實測流場搭配第二章所提的網格細 化方法。
圖 3-11 Exp01 孔隙間不同 xz 切頁 x 方向的流速(以向下游為正)
圖 3-12 Exp01 孔隙間不同 xz 切頁 z 方向的流速(以向上為正)
利用圖 3-11 中的數據,可將資料再重新編排並細化網格,得到圖 3-13,利用 圖 3-12 中的數據,可將資料再重新編排並細化網格,得到圖 3-14。詳細的方法請 參閱第二章的網格細化方法。
圖 3-13 Exp01 孔隙間不同 yz 切頁 x 方向的流速(以向下游為正)
圖 3-14 Exp01 孔隙間不同 xy 切頁 z 方向的流速(以向上為正)
從上述的步驟中可以發現,流速會受到周圍壓克力幾何形狀影響,例如:遇到迎 面遇到壓克力球時,會從四周繞開。為了描述孔隙間巨觀流向,因此定義空間週 期平均流速如下:
以空間結構來說,x、y 方向一個週期為一倍顆粒直徑,z 方向一個週期為T =√22 D 。 實際操作過程如圖 3-15。
圖 3-15 空間週期平均法。左圖為顆粒排列與用以平均的空間綠色盒子大小展示。
右圖為將盒子重疊於顆粒上,在此盒子內同時包含著所有孔隙與顆粒不同相對位 置造成的局部效應。
[u](X,0,Z) =
∫ ∫ ∫X+D2udxdydz
X−D2 D2
−D2 Z+T2
Z−T2 TD2 (3-1a)
[w](X,0,Z) =
∫ ∫ ∫X+D2wdxdydz
X−D2 D2
−D2 Z+T2
Z−T2 TD2 (3-1b)
[V](X,0,Z) = �[u]2(X,0,Z)+[w]2(X,0,Z) (3-1c)
各實驗所測到的空間週期平均流場如下,附上對間對應對照圖與搭配自由液面流 16 個斷面的平均流場一起顯示:
Exp01
圖 3-16 Exp01 空間週期平均流場(箭頭長度代表[V]大小)
從空間週期平均流場可以發現,液體在孔隙介質間的流場,受到自由液面流
y = 0.05cm(1/16D)
的影響相當明顯。其中約在 x = 6~8cm 處,自由液面的液體會注入補充孔隙間,
且此分流會分成兩部份,其中一股在孔隙間往上游移動,而另一股往下游。
往上游移動的液體,則會在 x =2~4cm 間,重新回到自由液面流內,形成一 個循環的結構。往下游移動的液體,則會在 x =10cm 開始重新回到自由液面流內,
繼續往下游移動。
Exp02
圖 3-17 Exp02 空間週期平均流場(箭頭長度代表[V]大小)
與 Exp01 組的流場相似,在孔隙介質內,x = 2~6 cm 處之間同樣存在一循環 的結構,液體從自由液面流補注到孔隙介質流中,往上游移動再返回自由液面流
y = 0.05cm(1/16D)
之中。
另外值得注意的是,雖然 Exp02 與 Exp01 相比的波形振幅較大,且波長較短,
但孔隙間向下的空間週期流速卻比較小。
Exp03
圖 3-18 Exp03 空間週期平均流場(箭頭長度代表[V]大小)
與前兩組實驗不同,Exp03 的流況為流量較小,Fr 較低,波長較短,主要目的為 觀察流況隨 x 方向前進後的變化。在圖中可以看到 x 在 4cm、10cm、16cm 附近都
y = 0.05cm(1/16D)
有往下層注入流速的區域,且 x 越大此區域面積也越大。另外可以發現,孔隙間 的流場大致都為向下游移動,在 Exp01 與 Exp02 中所觀測到的循環結構,僅在 x
= 8~9cm 有一小區塊。
3.3 壓力推估
3.2 節的圖顯示了孔隙間液體的流場,並不會在時間平均之後消失;也就是說,
孔隙間與自由液面液體的交換,並非是紊流驅動。本研究推測孔隙間的流場是受 壓力水頭與高度頭所驅動,此節將計算各組實驗靠近底床附近的壓力分布。
計算壓力的方法,McLean & Nikora(2006)提出以 Double-Averaging Concept 用以處理在水槽實驗中所測到在橫跨渠寬方向存在多個切頁的數據,方法如下:
∂〈u���〉k
∂t +〈u�〉� ∂〈u���〉k
∂xj = gk−1 ρ∂〈P�〉
∂xk −∂〈u�uk�〉�
∂xj −∂〈u������〉k′ u�′
∂xj + ∂
∂xj〈ν∂〈u���〉k
∂xj 〉 (3-2) 其中 〈 〉為橫跨渠寬方向空間平均
( �)為單一切頁內的時間平均,u = u� + u′,u′為紊流擾動 � 為跨渠寬方向的差異值,u� = 〈u�〉 + u�
處理過程需要先計算各個切頁中處理中〈 〉的值再進行平均,然而∂〈u�������〉∂xk′u�′
j 牽涉到紊流 的計算,在本實驗中若將渠寬方向跨距 16mm 的資料分成多個切頁分別計算,則 會有資料筆數過少,造成紊流計算不具代表性的問題。
因此本研究將渠寬方向跨距 16mm 的資料一起合併處理,採用時間平均的 Navier Stokes 方程式:
∂u���k
∂t + u���k∂u���k
∂xj = gk−1 ρ ∂P�
∂xk−∂u������k′u�′
∂xj + ∂
∂xj�ν∂u���k
∂xj� (3-3) 另一方面,在靠近水面區域的流場因為會受到水面反光影響而無法測量,故 僅能以(3-3)式計算在壓力在 x 方向上的變化,加上條件:
steady state,∂u�
∂t ~0 (3-4a)
二維流場,v� ∼ 0, ∂
∂y ∼ 0 (3-4b)
將(3-4)代入(3-3)式改寫如下:
ρ �u�∂u�
∂x + w�
∂u�
∂z� = −
∂P�
∂x +ρgx+ μ �∂2u�
∂x2 +∂2u�
∂z2� −∂(ρu�����)′u′
∂x −∂(ρu������)′w′
∂z (3-5)
沿 x 方向積分得:
dP� = −ρ∆1
2 u�2− ρw�∂u�
∂z dx +ρgxdx + μ �∂2u�
∂x2 +∂2u�
∂z2� dx −ρ∆�u������ − ρ∂′u′ (u������)′w′
∂z dx (3-6)
其中將各項分別命名以方便之後的討論:
Pconvx: −ρ∆1
2 u�2 (3-7a) Pconvy: −ρw�∂u�
∂z dx (3-7b) Pgx: ρgxdx
(3-7c) Pvis: μ �∂2u�
∂x2+∂2u�
∂z2� dx (3-7d) PRex: −∆�ρu������ ′u′
(3-7e) PRey: −ρ∂(u������)′w′
∂z dx (3-7f)
Pconv = Pconvx+ Pconvy (3-7g)
在計算壓力的過程中,需要用到的變數為u�, w�, u�����, u′u′ ������。所代入的資料分別為: ′w′ u�:將網格(1mm×16mm×1mm,渠道方向×渠寬方向×水深方向)內所有
測
到的渠道方向的速度 u 做平均。
w�:將網格內所有水深方向的速度 w 做平均。
u′:所測到的單筆數據 u 扣掉所在網格的u�。
w′:所測到的單筆數據 w 扣掉所在網格的w�。
u′u′
�����:將網格各單筆資料u′平方再平均。
u′w′
������:將網格各單比資料的u′、w′相乘方再平均。
但若直接將數據代入計算,將會有誤差傳遞放大的問題。這是因為本實驗中u�, w�在 x 方向具有週期性,故在處理數據時,先以 Matlab 內建快速傅立葉轉換(Fast Fourier Transform, FFT)近似,再代入計算。以下介紹並說明傅立葉轉換的使用方法。
傅立葉轉換可以將一資料序列F(x),x=1,2,3.…..N 拆解成不同波長正弦與餘弦 波的疊加:
FM(x) = � ansin (Nπ n x)
M n=0
+ � bncos (Nπ n x)
M
n=0 (3-8)
在使用上使用者需決定階數 M,所選用的階數越高,與原序列就越接近,藉由傅 立葉轉換,可將具有週期性波長較長的資料與波長較短的隨機震盪去除,且傅立 葉轉換有峰值較不易失真的優點。而傅立葉轉換在使用上的限制為必須是首尾相 接的重複波形,以下圖為例解說傅立葉轉換的用法:
a)
b)
圖 3-19 傅立葉轉換圖
圖 3-19a 為一 u(x)序列,為了產生符合傅立葉轉換要求頭尾相連的完整波形,取 a 圖中兩紅線中間的數據,做出鏡像反射產生一新序列如圖 3-19b 中的藍點。於此情 況便能以傅立葉轉換做出去除高頻震盪的平滑線(即圖 3-19b 中的藍線)。在各實 驗各情況 M 的選取方面如表 3-1,選取的依據為:在峰值失真(M 過小)與在局
部產生額外峰值(M 過大)之間取平衡。
表 3-1 各實驗情況所選取的 M 值 u�, w� u����� ′u′ u������ ′w′
Exp01 7 12 12 Exp02 7 12 N.A.
Exp03 17 12 N.A.
其中因為 Exp03 的數據u�, w�在空間中具有較多個週期,故使用較高的 M 值去近似。
另外數據u������因為數據震盪過大,無法以傅立葉轉換描繪其變化,故僅以 12 階近′w′ 似 Exp01 的u������,示範說明此項計算方法與過程。以下將以 Exp01 組別為例說明′w′ 各項壓力詳細的計算過程:
圖 3-20 變數u�,w�之分布(Exp01)
以 Exp01 為例,要計算壓力在z = 0.175cm 線上沿 x 方向變化時,需要用到 x 方向流速u�在z = 0.275cm、z = 0.175cm與z = 0.075cm三個高程的流速分布以及w�
在z = 0.175cm的流速分布如圖 3-20,其中實驗所測量到的數據以點顯示,為了避 免在計算過程中的誤差傳遞,選用 FFT 近似的結果以「與點同顏色的連續線」顯 示。各項計算時所需要用到的變數與計算過程不一,其雷諾項以外的各項計算結 果如圖 3-21,以下依序解釋在圖中各項結果之算法: