行政院國家科學委員會專題研究計畫 成果報告
自主性太陽能船最佳船型與太陽能板設計系統之開發研究
(I)
計畫類別: 個別型計畫 計畫編號: NSC94-ET-7-006-001-ET 執行期間: 94 年 01 月 01 日至 94 年 12 月 31 日 執行單位: 國立成功大學系統及船舶機電工程學系(所) 計畫主持人: 黃正弘 共同主持人: 艾和昌 報告類型: 完整報告 處理方式: 本計畫可公開查詢中 華 民 國 95 年 3 月 29 日
行 政 院 國 家 科 學 委 員 會 / 經 濟 部 能 源 局
能 源 科 技 學 術 合 作 研 究 計 畫 成 果 報 告
自主性太陽能船最佳船型與太陽能板設計系統之開發研究(I)
On the Research of Optimal Hull Form and Solar Panel Systems for an
Indigenous Solar Ship (I)
計畫編號:
NSC94-ET-7-006-001-ET
執行期間: 95 年 1 月 1 日至 95 年 12 月 31 日
計畫主持人:黃正弘 共同主持人:艾和昌執行單位:國立成功大學 系統及船舶機電工程學系
中
華
民
國
95
年
12
月
一、摘要 有鑑於維護地球生態環境,減少二氧化碳排放量、降低空氣污染,開發使用 新且乾淨的能源,已經是全球共識。因此,世界各工業先進國家正不斷地從事太 陽能之開發與應用的研究。在此前提之下便衍生了自主式太陽能船研發之動機 了。原先太陽能船計畫是整合型提出申請,分別提出三個子計畫,亦即最佳船型 與太陽能板設計系統規劃,電池電力系統與推進與監控系統。但核定時僅通過三 個個別執行的子計畫,為求完成整合,原團隊人力在有限經費下仍定期聚會討 論,第一年已完成兩人座太陽能船開發。 本計畫主要乃針對自主性太陽能船最佳船型之開發,並結合太陽能板設計系 統之開發於一體以便達到最佳化之目的。最佳太陽能船船型之開發乃依據反算設 計法之理論曡代而得,而太陽能板設計之太陽電池微焊接與抗反射封裝技術進行 研究。另太陽能板製程所需之週邊設備組裝及其製程規劃,亦將是本計畫項目。 藉實驗測試參數收集、分析,逐步建立高效率級太陽電池模組製作關鍵技術。 本計畫之執行不僅能提供我國在太陽能船產業之設計與製造之經驗亦可提 供高效率級太陽電池微焊接與抗反射封裝之製作能力,該技術對未來太陽能相關 產業開發新商品提供另一種高附加價值之選擇。 關鍵詞:太陽能船、最佳船型、太陽電池、微放電焊接、抗反射封膠 二、計畫緣由與目的 目前全世界正面臨著兩個嚴重的議題:其一乃是環境污染的問題;其二則是 能源短缺的問題。對於前者,聯合國已於 1992 年通過「氣侯變化綱要公約」,隨 後訂定「京都協議書」,主要是希望於 2008 年至 2012 年時,工業國家二氧化碳 排放量能以 1990 年為基準,平均減少 5.2﹪;至於後者,全球人口數於 1999 年 底已突破 60 億大關,且估計全球人口數將在 2050 年突破 100 億,人口急劇增加, 能源需求也快速增加。台灣雖然不是聯合國會員國,但在面對國際貿易競爭及與 我國國情相似的韓國和阿根廷等開發中國家,均自願提出二氧化碳減量目標及期 程的壓力下,台灣將無法置身於溫室氣體的減量責任之外。 台灣地區地處亞熱帶,陽光充足,日射量大,非常適合太陽能源之利用。 尤其是台灣南部地區,幾乎終年是陽光普照的日子,太陽的能源更是源源不斷, 是一個適合發展太陽能應用的地區。此外台灣亦是個海洋國內,造船及船舶相關 產業相關發達。在此前提之下便衍生了自主式太陽能船研發之動機了。因此原計 畫結合大台南地區大學之相關專業人才,分別提出三個子計畫,以便於兩年內完 成本自主性太陽能船系統開發之研究。 本計畫主要乃針對自主性太陽能船最佳船型之開發,並結合太陽能板設計系 統之開發於一體以便達到最佳化之目的。最佳太陽能船船型之開發乃依據反算設 計法之理論曡代而得,而太陽能板設計之太陽電池微焊接與抗反射封裝技術進行 研究。另太陽能板製程所需之週邊設備組裝及其製程規劃,亦將是本計畫項目。 藉實驗測試參數收集、分析,逐步建立高效率級太陽電池模組製作關鍵技術。 太陽能板設計與製作的執行:劃分為微放電焊接、抗反射封膠兩個主要部
分。前者應用微放電焊接技術,研究製程上之操作參數,如接觸點大小、接觸壓 力、放電能量,放電時間等,對太陽電池串接後光電轉換效率影響;後者將採取 單晶矽太陽電池封膠模板技術,所完成封裝太陽電池模組,將可安裝在弧形表 面,且經標準太陽電池模組強度測試,不可有太陽電池碎裂情形發生,且太陽電 池效率不因封裝製程而改變。不同厚度之抗反射封膠對整體效率影響、不同厚度 封膠之模組單位面積重量、實際可安裝表面之最小曲率半徑,均是該部分實驗探 討重點。此外,如何將太陽電池經接合與封膠過程後,可成具高光電轉換效率的 太陽電池陣列,長久以來一直是該新能源研究領域極其重要之關鍵技術,目前該 技術對目前全球生態有其迫切的必要性且符合高價值的經濟性。 三、研究方法與步驟 對於傳統船型之設計,當一新船型產生或船型因需求而改變時,為了得到最 佳之壓力分佈或最小阻力,常需以試誤法去做修正,如此不僅耗時耗力且不易獲 得最佳之船型。因此最佳化設計之概念之引進可克服前述所遇到之瓶頸。 此研究中吾人利用反算設計方法來從事於船型的最佳化設計,主要可分為兩 部分:正算部分為商用套裝軟體 SHIPFLOW 以及反算設計部分為拉凡格式法 (Levenberg-Marguardt Method)。在一般船用流力計算上來說,正算問題為利用 已知之船型來計算出其壓力分布、阻力或是其他係數(如:壓力係數 Cp、興波 阻力係數 Cw),而反算設計問題則是利用已知之條件(如:壓力分布、阻力或是 其他係數)進而反算求出符合此條件之船型,因此只要設計者依其所需給定已知 條件,即可設計出符合設計者所需要的最佳船型。 在本研究中吾首先給定一初始船型 A,以及一最佳船型所需的條件,此條件 可依設計者的需求而設定,在此吾主要針對球艏部分波高 Wh 或興波阻力係數 Cw來探討對於船型的影響。先利用 SHIPOFLOW 正算出船型 A 的船型條件(如: 壓力分佈 Cp、興波係數 Cw、球艏部分的波高 Wh等),再與最佳條件做比較,若 有相異則改變船型 A 的船艏部分,再計算出其新的船型條件而與最佳條件再做 比對,一直反覆疊代到其兩者間的差小於收斂值為止,則此最終船型即為吾所求 之最佳船型 [1-3]。 研究中對於船型的描述採用 B-Spline 曲面,它可將船型利用少數參數而完整 的描繪出來(例如使用控制點)。藉由改變 B-Spline 曲面之控制點座標來改變船 型曲面之座標,以達到吾所想要船型之改變,並配合反算設計問題中之拉凡格式 法,求出一最佳船型符合吾設計者在設計上的需求。 由於第一年核定之經費不足以依據最佳船型設計之線圖來開模製造,因此只 能購買既有之遊艇來加以改裝。本年度已針對該遊艇進行實船之拖航實驗,並求 得該遊艇之阻力及設計船速所需之馬力。圖一至圖四為實船拖航實驗之圖。 另自主性太陽能船太陽能板系統設計之開發研究乃針對太陽電池微焊接與 抗反射封裝技術進行研製並應用於最佳太陽能船型上。執行上劃分為微放電焊 接、抗反射封膠兩個主要部分,另需測試驗證等,研製小組分別進行各部分之設 備採購、組立、與實驗操作,藉實驗測試與參數收集、分析,逐步建立太陽電池
模組製作關鍵技術。
A. 微放電焊接試驗及操作參數分析
有感於已商品化之單晶矽太陽電池模組,不論在能量規劃、造型設計、重量 要求上,很難滿足太陽能車製作所需,艾教授於民國八十八年進行第二代太陽能 車製作時,便指導成員進行單晶矽太陽電池焊接技術研製,該焊接屬特殊技術, 焊接所需之焊料(solder-coated copper ribbon)、焊接劑(solder)、助焊劑(flux) 均有其一定規範,而且焊接過程之方法、步驟及太陽電池正反面焊接(見照片一、 二)時所需溫度均有一定控制,方能使太陽電池因焊接後所損失之效率降至最低。 目前較高效率太陽電池製造時,為增加模組有效集光面積,已將其上電流匯 集線路微細化並設計於一側,傳統的太陽電池焊接技術無法應用於在微細匯集線 路上,因此將應用微放電焊接技術,而製程上之操作參數,如接觸點大小(A)、 接觸壓力(F)、放電能量(P),放電時間(∆t),對太陽電池串接後光電轉換效率(η) 影響,將進行實驗測試,配合因次分析針對 η=f(A, F, P, ∆t); 建立最佳操作模式。 B. 太陽電池模板抗反射封膠 據各國相關技術報告歸納,深入對一般太陽電池模板封裝方法及優、缺點進 行瞭解,概述如下: 1. 一般矽膠封裝: 將焊接完成之太陽電池模組,固定於美耐板上,然後四周阻絕注入市面上普 通或液狀矽膠,舖平後靜置待其凝固乾燥即完成。 優點:(1)材料容易取得,且價格低廉。(2)施工步驟簡單,不需特殊設備。 (3)避震效果良好。 缺點:(1)材質耐侯性差,易產生變質,影響光電池轉換效率。(2)表面強度 差,不易清潔,易造成表面損壞。(3)氣泡問題需克服。 (4)重覆使用 率低。 2. 特殊矽膠封裝: 基板上先以特殊矽膠(RTV)塗層,膜厚約 1.6mm,均勻塗佈後舖上一層布, 使布密實地與矽膠結合,然後在基層上固定光電池模組再使用特殊矽膠與 Mylar (3M)薄膜封裝,將矽膠注入光電池與薄膜中間,維持矽膠厚度為 1.6mm,並須 除去氣泡且不能傷及光電池,該薄膜為透明無色,完成後靜置凝固及乾燥。 優點:(1)抗震性佳,雙層矽膠可充份保護封裝後之光電池。(2)不需特殊機 械設備即可完成封裝。(3)重覆使用效果佳。 缺點:(1)3M 品牌的Mylar 薄膜取得不易,需仰賴進口。(2)完全人工操作, 作業人員須具備熟練之技巧。(3)薄膜不易完全貼實在矽膠上,容易 產生皺摺。(4)完成後表面清潔保養不易,且矽膠強度不足,易受損。
3. 環氧樹脂封裝: 將焊接完成後之太陽電池模組固定於基板上,四周建立組絕後調合環氧樹脂 主劑與硬化劑注入於基板上,利用紫外線或真空方式除去氣泡及使其硬化,即完 成封裝(見照片三)。 優點:(1)耐候性佳。(2)原料取得方便,價格適中。(3)表面清洗容易,且環 氧樹脂硬化後強度佳。 缺點:(1)需特殊裝備製造(如真空設備、紫外線硬化設備)。(2)抗震性較 差。(3)事前須詳細檢查輸出狀況及焊接情況,確保良好,封裝後無 法再行拆卸。(4)氣泡需完全消除。 4. 薄膜真空封裝: 將焊接完成之太陽電池模組固定於基板上,利用膠製膜套,將整塊模板套入 後,開口端使用真空設備將套內空氣抽離,封口後完成封裝。 優點:(1)重量輕,除膜套外不需其他材料。 (2)光電池重覆使用率極高。 缺點:(1)須製作真空設備與封口裝置。(2)膜套無規格製品可供使用。(3)空 氣抽離後表面較不易維持平整。(4)接線孔端須經密封處理。(5)維護 較為不易。 5. 玻璃夾層封裝: 太陽電池模組焊接完成後,其上下使用 EVA 材質層,再使強化玻璃覆蓋於 模組表面上,整個過程需在真空熱壓設備中完成,最後四周填實即完成封裝。 優點:(1)清洗方便,維護容易。 (2)材料獲得容易。 缺點:(1)抗震性差,多使用於固定物上。(2)重量較重。(3)存放、移動安全 堪虞。(4) 太陽電池重覆使用性差。 目前國內進口太陽電池模板之封裝方法多為上述第 5 種方法,由於 EVA 材 料、RTV 塗層均無本土廠家生產。因此,太陽能船之太陽電池模組封裝製作, 主要以上述第 3 種方法切入,自主研製封裝技術,並以抗侯性佳之環氣樹脂製 作基板,待焊接完成後之太陽電池固定在基板上,再澆上一層相同成份、相同厚 度(需特殊控制)之環氣樹脂,其成品重量較目前商品化太陽電池模板減輕許多, 成本較低、封裝步驟較少,較適合使用於小馬力之載具、或機動式(戰備用)太陽 電池模板上。但環氣樹脂經過一至二年後,易有脆化現象,大大降低了太陽電池 模板使用壽命! 本計畫將研究太空級單晶封膠模板(Mono-crystalline modules)技術,該先進 技術之優點有以下幾點: 1. 使用更薄封膠材料,可有效降低每單位面積之重量。 2. 使用抗反射封膠(non-reflective encapsulation),可讓照射至太陽電池模組表面 之光線不立即反射,致使其進行表面漫射,自然可延長幅射光譜滯留在太陽 電池上時間,增加其光源吸收力,進而提升效率。
底,除可使模組維持較輕重量外,亦具所需強度及軔性,且有更佳耐候特性 及耐震性。 完成封裝太陽電池模組,將可安裝在弧形表面(曲率半徑<0.3 m),且經標準 太陽電池模組強度測試,無太陽電池碎裂情形發生;另模組重量將減至 1.2 kg/m2,抗反射封膠亦將使太陽電池效率不因封裝製程而有所改變。另不同厚度 之抗反射封膠對整體效率影響、不同厚度封膠之模組單位面積重量、實際可安裝 表面之最小曲率半徑,均是該部分實驗探討重點。此外,製程所需之週邊設備組 裝及其製程規劃,亦將是本計畫項目。 圖一、實船 圖二、阻力計
圖三、實船拖航實驗圖
圖四、實船拖航實驗圖
照片二、太陽電池背面焊接 照片三、完成之太陽電池模組 四、成果說明 太陽能板設計系統目前配合船模原型(見圖五所示),已完成兩種太陽能板設 計,一為對稱兩邊全開式(見圖六所示);另一為對稱兩全開外加一個固定板面(見 圖七所示)。因考慮開啟時之全船穩定性,經整合計畫的討論結果採後者設計, 並採前低後高,使太陽能板收起時能緊密於固定板面接合且行進時可維持船身平 穩度。 船型太陽能板設計理念冀將太陽能發揮至最大效益,同時需考慮太陽能接收 能力、支撐結構強度及開啟與收放方便性等,所以採圖七所示之太陽能板設計, 依其設計可鋪設太陽能板(受光)面積為 3.8 m2,為增加太陽電池模組光電轉換效
率,使用國產光電轉換效率為 17%之單晶矽(Mono- crystalline silicon)太陽電池(照 片四所示),其尺寸為 125mm×125mm(見圖八(a)所示),在進行封裝前,得先將太 陽電池作適當幾何切割(見圖八(b)(c)所示),以便 i)獲得完整晶片串接,增加模組
有效集光面積(active solar cell area);ii) 串接後模組較易貼覆設計曲面,減少風 阻;iii)完成系統所需額定電壓。 圖九為將太陽電池晶片經三次切割,最後獲得出尺寸為 125mm×43.57mm 大 小之晶片,其最大電力特性為: 0.5V 及 1.8A;接下來需將經切割完成的單晶片作 串聯,形成 57 小模組(見圖九、照片五所示), 其小模組最大電力特性為: 17.5V 及 1.8A;再以四區小模組串聯成一大模組 (見圖十所示),其最大電力特性為: 70V 及 1.8A;最後將五大模組並聯成一完整陣列,其陣列最大電力特性為: 70V 及 9A,並鋪設於船頂翼型基板(見圖十所示)。 全船太陽電池數量為 700 片經切割完成的單晶片,俱最大 630Wp 光電轉換 能力。此外,為保護太陽電池及連結之焊線,不受空氣中水份、其他化合物之侵 蝕及灰塵等的侵害,而致降低轉換效率並延長模組之使用壽命,需將焊接完成模 組經熱壓真空製程設備進行封裝,並使用抗反射 (non- reflective)透光表層,可讓 照射至太陽電池模組表面之光線不立即反射,致使其進行表面漫射,自然可延長 幅射光譜滯留在太陽電池上時間,增加其光源吸收力,進而提升效率。 為減少能源消耗增加氣動力,太陽電池所鋪設基板採用 HQ-2.0/8 翼型(見圖 十一所示),藉以減少太陽集光模板的空氣動阻力,其外型曲度又不影響太陽電 池舖設。設計時先用 HQ-2.0/8 翼斷面所提供之對應 X-Y 之點資料,以 PRO/E 3D 繪圖軟體依照 X-Y 之點資料繪製出一段面 curve,再以這一條 curve 為基準,掃 出上殼曲面,重複上述步驟可畫出下殼,最後將上下殼作 Surface Marge,便完 成主體外型設計(見圖十二、照片六所示),其相關尺寸描述見表一所示。另使用 玻璃纖維及強化樹脂 (fiber glass reinforced plastic coating) 材料作模組基底,除 可使模組維持較輕重量外,亦具所需強度及軔性,且有更佳耐候特性及耐震性。 目前所設計之太陽能板開啟模擬(如圖十三所示),其開啟機構採氣油壓作動,組 件如圖十四所示。整個船型太陽能板系統以不鏽鋼管支撐架(見照片七所示)作結 構支撐,並與船體接合,以形成模組化系統製作需求。 經上述之製作過程後太陽能電池組如照片八所示。其組裝後之自主性太陽能 船如照片九及十所示。目前該太陽能船正於成大水槽測驗整合效能,預計於測試 完成後移至台南運河做實際航海試驗。 圖五、實船原型圖
圖六、兩邊全開式 圖七、兩全開外加一個固定板面
(a) (b) (c)
圖八、太陽電池晶片經三次切割製程及尺寸 圖九、太陽電池小模組設計
圖十一、HQ-2.0/8翼型斷面
圖十二、太陽電池模板外型設計
圖十三、太陽能板開啟模擬
照片四、單晶矽太陽電池
照片五、太陽電池單一模組實體圖
照片七、固定板面之支架結構 表一、太陽能板外型設計尺寸 太陽能板之設計 翼型斷面最大厚度約 10 cm 最大長度 3.4 m 1.4 m 最大 俯視寬度 最小 1.2 m 估計重量 11.5 kg 最大可舖設太陽能板面 積約 4~4.5 m×m 開起高度 286 cm(高) 照片八、太陽能電池組
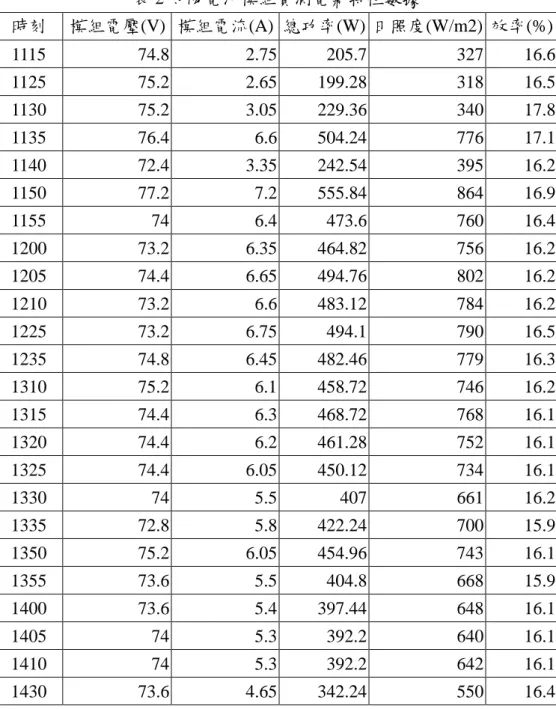
照片九、自主性太陽能船全貌 五、實船整合測試 為驗證本計畫所提系統之可行性,本太陽能電動船同時整合成功大學系統與 船舶機電控制學系『自主性太陽能船最佳船型與太陽能板設計系統之開發研 究』、『自主性太陽能船之推進與監控系統整合設計』與臺南大學『自主性太陽 能船船電系統之研製』三項計畫進行實船測試,相關系統整合設定如照片十至照 片十二所示,船上裝置包括太陽能板、電能轉換器、鋰電池組、變頻驅動器、推 進器及以 Labview 為基礎之監控及操控機構。整合測試項目則包括太陽能板功率 試驗、電池放電測試、船體拉力試驗、前進、後退與轉向測試,測試電氣數據則 由 Labview 程式線上即時監視及計算輸出取得。 (1)太陽電池測試 本電動能船設計使用單晶矽太陽能電池模組進行太陽光電能轉換,其中配合 船型設計,太陽能電池模組鋪設面積計 3.8 m2。為試驗實際太陽能板之發電效 能,目前已實驗使用照度計與電力表進行太陽能板發電功率測試,經實測得到在 日射量 1000W/m2、環境溫度 25℃狀態下,太陽電池模組工作電壓 78(V)、工 作電流 8(A),總發電功率為 624 W;另在戶外環境下,若以固定時距為紀錄基 準,同時監控電壓、電流、日照度數據,則相關實驗結果紀錄如表 2 及圖十五,
由該表可看出,太陽能板最大發電功率發生在 11 時 50 分的時候,此時實測太陽 能發電量為 555.84 瓦,日照計顯示每平方米可得 864W,茲由於使用船體鋪設太 陽能板面積為 3.8 m2,因此光電模組效率經換算為 16.9%。另如以最大效率值為 分析對象,本船使用之太陽板實測最大效率為 17.8%,發生在 11 時 30 分的時距, 此時模組電壓、電流、及日照量參數分別為 75.2V、2.65A 及 340W/m2效率值, 同時實驗中各時距效率變化範圍為 15.9%至 17.8%,該效率變化係與太陽能板表 面溫度變化有關。 綜合實測數據分析可看出,本太陽電池模組在實際太陽日照條件下,電池發 電功率測量會受到日照角度、電池溫度變化之影響有所變化,然而由實驗數據及 統計圖表顯示,日照強度與太陽能電池之轉換效率皆在 15~17%範圍變內動,符 合已知之單晶矽太陽能板特性,因此可證實本計畫所使用之太陽能電池在串並組 合後確可在預期之功率準位運作,達成光電轉換之設計目標。
(a)太陽能船體
(b)整合控制測試
照片十二:實船推進器試驗 0 200 400 600 800 1000 1115 1130 1140 1150 1200 1210 1220 1230 1240 1255 1305 1315 1325 1335 1345 1355 1405 1430 時刻 功 率 (W /m 2 ) 總功率(W) 日照度(W/m2) 圖十五:太陽電池模組實測發電功率圖
表 2 太陽電池模組實測電氣特性數據 時刻 模組電壓(V) 模組電流(A) 總功率(W) 日照度(W/m2) 效率(%) 1115 74.8 2.75 205.7 327 16.6 1125 75.2 2.65 199.28 318 16.5 1130 75.2 3.05 229.36 340 17.8 1135 76.4 6.6 504.24 776 17.1 1140 72.4 3.35 242.54 395 16.2 1150 77.2 7.2 555.84 864 16.9 1155 74 6.4 473.6 760 16.4 1200 73.2 6.35 464.82 756 16.2 1205 74.4 6.65 494.76 802 16.2 1210 73.2 6.6 483.12 784 16.2 1225 73.2 6.75 494.1 790 16.5 1235 74.8 6.45 482.46 779 16.3 1310 75.2 6.1 458.72 746 16.2 1315 74.4 6.3 468.72 768 16.1 1320 74.4 6.2 461.28 752 16.1 1325 74.4 6.05 450.12 734 16.1 1330 74 5.5 407 661 16.2 1335 72.8 5.8 422.24 700 15.9 1350 75.2 6.05 454.96 743 16.1 1355 73.6 5.5 404.8 668 15.9 1400 73.6 5.4 397.44 648 16.1 1405 74 5.3 392.2 640 16.1 1410 74 5.3 392.2 642 16.1 1430 73.6 4.65 342.24 550 16.4
(a) 定電流充電狀態 (b) 定電壓充電狀態 2圖十六:蓄電池模組充電測試波形圖 (2)電能轉換器試驗 於本系統架構中,電能轉換器之主要功能係在太陽光電能及電動引擎間建立 直流電源儲能與釋能之互動能力,亦即當太陽能發電功率大於負載所需功率時, 電能轉換器除供應馬達驅動電流之餘,亦會在電池端會建立一穩定之暫存電壓, 以進行系統電池之充電控制,其中如電池充電電流低於預設均充電流大小,則電 池即受控進行定電壓充電;反之如電池充電電流高於均充設定值,則電流控制線 路作用,脈波寬度調訊號受控部分截止,進而達到降低電池充電電流之目的。另 一方面,當太陽能發電功率小於馬達所需之功率時,不足之電力將由預存之電池 放電提供,轉換器只負責進行太陽能光電轉換之工作。今為確保電能轉換器與蓄 電能模組間具直流電源互動能力,本計畫已完成所提轉換器之光電能轉換及電池 充電控制,相關測試結果由圖十六可看出,電能轉換器確已具備對蓄電池模組進 行定電流及定電壓充電之能力,其中圖十六(a)即為轉換器對蓄電池模組進行定 電流充電之實測圖,此時之充電電流已被限制在 10AH,並待蓄電池之儲存能量
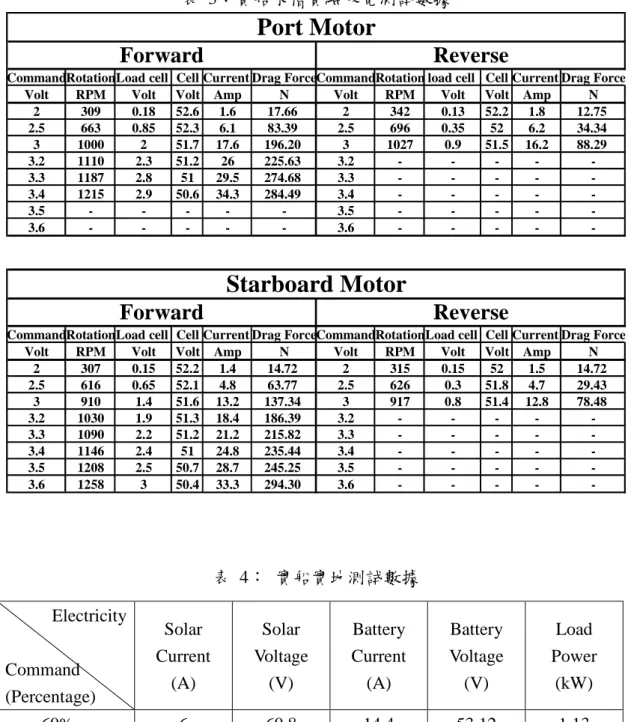
呈現飽和且充裕之時,轉換器即由定電流充電狀態轉而對蓄電池進行定電壓充 電,亦即如圖 5(b)所示,此狀態之充電電流已逐漸減少,且其充電電壓將緩慢上 升至充電參考設定值,此實測結果證實本計畫所提系統電能轉換器之設計,確已 融入蓄電池充電技術之應用。 (3)鋰電池獨立運轉測試 為瞭解本計畫所擬太陽船在無日曬惡劣之航行條件下系統運轉特性,本計畫 亦已進行鋰電池獨立運轉測試,該測試係在成功大學系統系地下室試驗渠道進 行。表 2 列出測試數據,該數據係在乘客 3 名、缺乏太陽能注入下僅由鋰電池單 獨放電的條件下實測獲得。由表 3 可看出,重載時每一馬達各需求電流 34.3A, 此時電池組合計以 68 A 以上之高電流穩定放電供驅動馬達使用,馬達轉速 1258rpm;另馬達反轉試驗(船體後退)在轉速 917rpm 時,船隻需求 51.4V、12.8 安培,計 657.9W。 (4)實船實地測試 本計畫亦曾在臺南安平運河進行太陽能船實地測試,本太陽能船採單晶矽太 陽能板總裝置量為 6 百餘瓦,測試當天天候良好,載重乘客 4 名約 300 公斤。照 片十三為太陽能船實地測試畫面,包括吊車運送船體離校、船隻水道航行前照、 後照照片,表 4 則記錄相關航行電氣數據,其中驅動訊號準位以總刻度百分比表 示,分別設定在 60%、70%、76%的訊號強度下分別記錄太陽能發電電壓電流、 電池電壓電流及電動引擎消耗功率。如表 4 所示,由表數據可算出在訊號強度 60%、70%、76%下太陽能板平均發電量分別為 364.8W、387.8W 及 272.8W,鋰 電池放電功率分別為 764.9W、1.42kW 及 2.1kW,負載總消耗 1.13kW、1.81kW、 2.37kW。由相關測試結果顯示,本計畫所設計之電力系統確有足夠及穩定之電 能供應太陽能船前進所需之電力。
表 3:實船水槽實驗放電測試數據
CommandRotationLoad cell Cell Current Drag ForceCommandRotation load cell Cell Current Drag Force Volt RPM Volt Volt Amp N Volt RPM Volt Volt Amp N
2 309 0.18 52.6 1.6 17.66 2 342 0.13 52.2 1.8 12.75 2.5 663 0.85 52.3 6.1 83.39 2.5 696 0.35 52 6.2 34.34 3 1000 2 51.7 17.6 196.20 3 1027 0.9 51.5 16.2 88.29 3.2 1110 2.3 51.2 26 225.63 3.2 - - - - -3.3 1187 2.8 51 29.5 274.68 3.3 - - - - -3.4 1215 2.9 50.6 34.3 284.49 3.4 - - - - -3.5 - - - - - 3.5 - - - - -3.6 - - - - - 3.6 - - - -
-CommandRotationLoad cell Cell Current Drag Force-CommandRotationLoad cell Cell Current Drag Force Volt RPM Volt Volt Amp N Volt RPM Volt Volt Amp N
2 307 0.15 52.2 1.4 14.72 2 315 0.15 52 1.5 14.72 2.5 616 0.65 52.1 4.8 63.77 2.5 626 0.3 51.8 4.7 29.43 3 910 1.4 51.6 13.2 137.34 3 917 0.8 51.4 12.8 78.48 3.2 1030 1.9 51.3 18.4 186.39 3.2 - - - - -3.3 1090 2.2 51.2 21.2 215.82 3.3 - - - - -3.4 1146 2.4 51 24.8 235.44 3.4 - - - - -3.5 1208 2.5 50.7 28.7 245.25 3.5 - - - - -3.6 1258 3 50.4 33.3 294.30 3.6 - - - -
-Reverse
Forward
Port Motor
Starboard Motor
Reverse
Forward
表 4: 實船實地測試數據 Electricity Command (Percentage) Solar Current (A) Solar Voltage (V) Battery Current (A) Battery Voltage (V) Load Power (kW) 60% 6 60.8 14.4 53.12 1.13 70% 6 64.64 27.2 52.16 1.81 76% 4.2 64.96 40.8 51.52 2.37六、結論
本計畫成功的設計發展一自主性太陽能船,並經於臺南運河實測後證明該 主性太陽能船之性能優良。本計畫之相關研究成果將提供國內船舶相關業者技 術,朝大型觀光太陽能船發展之目標努力。
參考文獻
[1] C. H. Huang, C. C. Chiang and S. K. Chou, " An Inverse Geometry Design Problem in Optimizing the Hull Surfaces", Journal of Ship Research, Vol. 42, No. 2, pp. 79-85,1998.
[2] P. F. Chen and C. H. Huang, " An Inverse Hull Design Problem in Optimizing the Desired Wake of Ships", Journal of Ship Research, Vol. 46, No. 2, pp. 138-147, 2002.
[3] P. F. Chen and C. H. Huang, "An Inverse Hull Design Approach in Minimizing the Ship Wave", Ocean Engineering, Vol. 31, No. 13, pp. 1683-1712, 2004.
[4] 艾和昌,"南台阿波羅一號",太陽能學刊,第四卷⋅第一期,pp.32-34,民 國88年4 月。 [5] 艾和昌等,"太陽能車設計與製造",第十五屆全國技術及職業教育研討會(作 品參展),工業類⋅機械組,民國89 年4 月。 [6] 謝惠子,2003,“阿波羅之光—南台科技大學太陽能車設計與製作”, 能源報 導月刊-能源與生活, 4 月號. [7] 艾和昌,2003,“機光電整合-太陽能車系統介紹”, 能源報導月刊-走入能源, 10 月號. [8] 艾和昌,2003,“追夢工程-世界太陽能車大賽”, 能源報導月刊-再生能源, 9月 號. [9] 艾和昌,"阿波羅三號太陽能車",太陽能及新能源學刊,第九卷⋅第一期, pp.13-17,民國93 年6 月。
[10] K. Mitchell, C. Eberspacher, J. Ermer and D. Pier, "Single and Tandem Junction CuInSe2Cell and Module Technology", 20th IEEE Photovoltaic Specialists
Conference, Las Vegas, September, 1988, pp. 1384-1389.
[11] 艾和昌,2003,“矗立雲霄-風力發電系統”, 能源報導月刊-走入能源, 6 月號.
[12] 艾和昌,2003,“光起電生-太陽光電發電系統”, 能源報導月刊-走入能源, 8
附件
研發成果資料表
日期:94 年 12 月 29 日 計畫名稱:自主性太陽能船最佳船型與太陽能板設計系統之開發研究(I) 計畫主持人:黃正弘 計畫編號:NSC94-ET-7-006-001-ET期刊
論文
研討會
技術報告
申請
獲得
專利
應用
與產業界、研發
機構互動成果
茂迪股份有限公司因地利之便,與本計畫共同主持人艾和昌教授常 有互動,該公司目前雖主要生產多晶矽太陽電池,但對高效率,高 產值之太陽電池亦深感興趣。此外,該公司目前所生產之太陽電池 模組,多送到國外作封裝,未來隨著市場供應量增加,亦企圖自行 開發太陽電池焊接與封裝製程,而艾教授指導之學生,已有一位聘 入該公司,從事焊接及封裝製程評估與開發。可利用之產業
及
可開發之產品
(1) 本計畫將提供國內船舶相關業者技術,朝大型觀光太陽能船發 展之目標努力。 (2)本計畫將與該公司交流太陽電池放電焊接製程及模組封技術,期 開發成自動化生產設備,以滿足業界生產所需。技術特點
本系統為自行設計之太陽能船,將來若有大型觀光太陽能船之需求 時,本系統將可以在短時間內修正使用。推廣及運用的價值
若朝大型觀光太陽能船方向發展,應有推廣之價值。