第三章 系統分析與建構
本章將討論嵌入式專家系統於技能教學之建構方法與分析,為了讓學 習者可以真正體驗到真實電機實驗接線的技能教學特性,在課堂後也能夠 練習或訓練相關技能,本研究以標準串列通訊界面完成硬體與硬體之間的 資訊傳輸、以 Silicon Laboratories 所開發的 C8051F040 SoC 嵌入式系統晶 片做為引導學習模組(Teaching Module;TM)、操作學習模組(Operating Module;OM)、訊號收集模組(Signal Acquisition Module;SAM),以 CLIPS 專家系統完成電機訓練的專家知識庫,最後將專家知識庫的知識法則植入 系統晶片完成電機實驗技能教學嵌入式專家系統設計,圖 3-1 為本系統設 計流程圖。
規劃系統之架構與系統運作分析
建構電機實驗技能教學平台
設計以專家知識為基底之系統晶片
確定實驗技能教學步驟
系統軟、硬整合測試
完成電機實驗技能教學嵌入式推論系統 確定電機實驗接線步驟、順序
嵌入式專家系統推論設計開發
第一節 系統分析與流程規劃
系統建構是以實體接線模組設計和嵌入式系統晶片為本研究實驗系 統核心,學習者進行實驗時可與實驗系統互動,在引導接線過程中發現到 有疑問或無從下手的時候,可以由系統進行引導學習,藉由一步一步引導 的方式使學習者完成面板整個電機實驗接線。如果學習者在接線的過程 中,由於嵌入式系統晶片植入 CLIPS 所推論的專家知識,系統晶片內有接 線過程的診斷與監控機制,系統會自行偵測接線實驗過程的正確性,所以 學習者在接線過程可隨時監控學習者在電機實驗接線教導系統上的動 作,如在實驗過程中有發生重大的接線錯誤或與系統所教導的接線不符合 時,系統會在第一時間發出警告,要求學習者立即更正接線,這樣可加深 學習者的學習印象及避免日後真正實際接線時,發生造成對人的危險及對 設備的損壞,圖 3-2 為人機互動架構圖。
圖 3-2 人機互動架構圖
學習者
嵌入式專家推論系統 (電機實驗接線技能教學)
引 導 診
斷 資訊回饋
引導學習/操作學習
RWSP Panel SoC
學習
訊號偵測 訊號收集 訊號顯示 面板資訊
儀表顯示 Embedded Expert System
Expert Expertise & Rules
電 機 實 驗 接 線 面 板
Signal Diagnosis
建構電機實驗技能教學嵌入式專家系統是相當複雜的,為降低設計之 繁複,以及考慮系統所涵蓋功能、實驗流程和設備,本研究提出電機實驗 技能教學嵌入式專家系統的架構分三個實驗模組來探討,分別為引導學習 模組(示範訓練模組,Teaching Module;TM)、操作學習模組(自我訓練模 組,Operating Module;OM)、訊號收集模組(Signal Acquisition Module;
SAM),各模組之間以 SoC 嵌入式系統晶片為系統處理核心,如圖 3-3 所 示,各模組敘述如下:
圖 3-3 嵌入式系統模組架構圖
一、引導學習模組(Teaching Module;TM)
引導學習模組(示範訓練模組)主要是使真實電機實驗接線平台更具完 整的互動性與智慧化,本研究以使用傳統電機實驗接線過程與步驟整理出 正確地接線實驗步驟,規劃各種電機實驗接線過程,在實際接線服務面板 (Reality Wiring Service Panel;RWSP)顯示接線引導的指示,學習者可選擇 不同的電機實驗接線進行練習,依照系統指示逐步完成接線過程。接線引 導機制是將學習者在實驗接線環境上的行為儲存至嵌入式系統晶片上,以 便對學習者的接線做監控,而且可依照學習者所想要的接線練習將引導步 驟逐一呈現在 RWSP 接線環境上,加強學習者與接線環境的互動,使學習
引導學習模組
操作學習模組 訊號收集模組
SoC
(TM)
(SAM) (OM)
RWSP 接線引導
RWSP 錯誤分析 接點掃瞄
訊號處理
二、操作學習模組(Operating Module;OM)
操作學習模組(自我訓練模組)主要是使真實電機實驗接線平台更具完 整的互動與智慧化,本研究運用以 CLIPS 語法為核心開發出專家系統,統 整專家系統所列的專家知識,植入硬體推論晶片內,藉由訊號收集模組的 D I/O 功能擷取 RWSP 面板上的接線訊號進行操作學習的接線診斷,操作 學習模組是由 RWSP 與錯誤分析的機制所組成,提供學習者在操作學習時 的互動、教導學習、監控行為及重點提示等功能。
錯誤分析機制主要是提供學習者在進行實驗接線時的監控、督導,在 監控的過程中,發現學習者在接線練習發生了錯誤接法或步驟,藉由接線 錯誤的行為進行分析,分析的結果會立即顯示出訊息,告知學習者為何種 錯誤,加強對實驗接線的印象及避免在進行真正的電機實驗時,因接線而 對電機或實驗的設備,產生不良的影響及損壞。所以錯誤分析機制具有知 識學習的功能,因具備各種電機實驗接線的要點、方法及注意事項等知 識,在學習者需要時,可以隨時提供學習者做為參考與學習的指標。
三、訊號收集模組(Signal Acquisition Module;SAM)
訊號收集模組是指學習者在實際接線服務面板上進行練習時,在面板
上所連接的點,會依相對位置的功能點立即對應轉換,每一功能點以 D I/O
方式將訊號送進嵌入式系統晶片內做訊號處理,將每一 D I/O 的訊號記錄
起來,當學習者每進行一步接線動作,按下系統確認鍵後,就會將學習者
的接線動作記錄起來,進行接線診斷、監控,系統確認無誤後才能進行下
一個接線動作以確保系統安全。訊號收集模組是引導學習模組、操作學習
模組的前端處理,亦是系統與學習者的人機介面,學習者在面板前透過接
線的訊號轉換,經由訊號收集模組將訊號轉換,轉換成有意義的資訊給
SoC 晶片進行診斷、監控,再將系統診斷結果回傳給學習者,讓學習者觀
看診斷訊息瞭解接線過程是否正確。
第二節 系統運作分析
一、系統運作之概念
嵌入式專家系統概念,顧名思義即是將學習者與接線教導系統的實驗 規則與專家法則嵌入至系統晶片,系統運作上加上互動的含意,讓學習者 在學習時有輔助教學的精神,學習者可以獲得系統資訊輔助,進行相關實 驗的學習;如學習者無法與系統進行互動,學習者就和在翻閱一本書沒有 什麼差別,只有單方面學習,任由學習者漫無目的的翻閱;因此本研究將 嵌入式專家系統之各功能的運作關係概念分為引導學習模組、操作學習模 組、訊號收集模組三個部分,訊號收集模組是扮演著系統整體互動的核 心,備有顯示器幕是與學習者互動溝通的橋樑,也是系統與學習者做動態 學習與引導學習的主要介面;引導學習模組提供各種電機實驗接線所需的 資訊;操作學習模組提供系統監控學習者接線行為的環境。如圖 3-4 為系 統整體互動關係圖。
學習者 (User)
訊號收集模組 (SAM)
操作學習模組 (OM)
引導學習模組 (TM) 學
習 互 動 與 回 饋
動 態 學 習 與 引 導
診 斷 接 線過
程 接 線
行 為 引 導 接線
行為 操作
診斷 接線
過程
二、系統運作之流程
以下將分別探討學習者與系統之間的互動關係,學習者在系統監控機 制下,需在真實接線面板上選擇要進行的是引導學習或操作學習。這兩種 模式不同的地方是前者必須依照系統所提供的接線實驗步驟,完成由系統 所教授的接線實驗,所接的線路都必須與所要學習的接線實驗相符。後者 屬於開放式學習,沒有一定的接線步驟,但是接線的過程都會經由診斷系 統判斷接線是否符合線路規則。
圖 3-4 所示,學習者透過訊號收集模組與硬體介面(引導學習模組、操 作學習模組)溝通,經由這個模組讓這三者的關係連接起來使整體系統更具 互動及智慧。如圖 3-5 所示為 RWSP 環境系統互動運作流程,學習者從 RWSP 介面可以選擇兩種教學模式,系統提供引導學習模式與操作學習模 式的功能,不僅讓學習者獲得正確的接線實驗知識,更可獲得實習當中技 能認知的熟練度,這兩種模式的功能分述如下:
1. 引導學習模式:
當學習者實施引導學習時,引導學習模組會取得引導步驟的各項資 料,進而引導學習者所要學習的電機實驗接線;系統會顯示出接線實驗的 接線接點順序的訊息,要求學習者跟著此訊息指示接線,逐步地引導,而 當學習者接線時,系統會將此接線位置的訊號送進診斷機制處理,依此位 置與系統所引導的接線位置相互比較、分析,如有不同,系統則會顯示錯 誤或警告訊息在 RWSP 環境中,令學習者能清楚地明白錯誤為何,錯誤在 何處,接著再次返回這一步驟再次訓練,接著再進行下一步驟的學習,如 此反覆,直至完成整個接線的訓練,當完成整個訓練的同時,也可將所接 的線路,轉換至實際實驗環境,進行真實電機實體接線,並觀察運作情形 及數據分析。
2. 操作學習模式:
學習者自行針對所要練習的電機實驗接線進行練習,學習者每接一條
線路後,則診斷系統會將學習者在 RWSP 環境上相對應的接線接點位置分
析、尋找出來,以讓系統能了解接線的情形,並對接線的情形進行診斷及 分析,而診斷及分析後的結果會顯示在 RWSP 顯示環境上,讓學習者可以 清楚明白自己在電機實驗接線的過程、步驟有何問題、需要改進的地方或 錯誤的地方,在這之後學習者也可讓接線的線路做非即時地轉換至實際實 驗環境。在這些過程中,尚未轉換至實際實驗環境前,學習者隨時可透過 監控系統中的接線診斷功能,獲得正確的線路接線規則及有關電機實驗接 線的相關知識。
圖 3-5 RWSP 環境系統運作流程
錯誤
正確
是
否 是
否 否
是
學習者
引導學習 操作學習
接線 接線
1
1
是否依照引導的接
線步驟及接點位置 2
是否完成接線 1 2
將診斷結 果顯示在 顯示器幕
引導下一 個接線步 驟及接點
診斷與分析
將診斷結 果顯示在 顯示器幕
將診斷結 果顯示在 顯示器幕
是否繼續接線
完成接線訓練 完成接線訓練
系統切換至實 際實驗模組 系統切換至實
際實驗模組
接線 引導
接線 診斷
1 2
RWSP
第三節 建構實驗平台
本研究為了使學習者能夠做電機實驗接線的練習與訓練,讓學習者能 熟練電機實驗接線的技能,硬體架設了實際實驗模組、實體接線模組、訊 號收集模組、LED 閃爍燈電路模組、電阻調整繼電器模組、操作面板電阻 調整顯示模組等,實體接線模組是藉由訊號收集模組收集面板上所連接的 點的訊號,會依相對位置的功能點立即對應轉換,每一功能點以 D I/O 方 式將訊號送進嵌入式系統晶片內做訊號處理,將每一 D I/O 的訊號記錄起 來,當學習者每進行一步接線動作,按下系統確認鍵後,就會將學習者的 接線動作記錄起來,進行接線診斷、監控,系統確認無誤後才能進行下一 個接線動作以確保系統安全。訊號收集模組是引導學習模組、操作學習模 組的前端處理,亦是系統與學習者的人機介面,學習者在面板前透過接線 的訊號轉換,經由訊號收集模組將訊號轉換,轉換成有意義的資訊給 SoC 晶片進行診斷、監控,再將系統診斷結果回傳給學習者,讓學習者觀看診 斷訊息瞭解接線過程是否正確。如圖 3-6 為實驗平台硬體示意圖。
圖 3-6 實驗平台硬體示意圖
一、實際實驗模組
實際實驗模組即為電機實驗硬體設備的直流電壓、直流機電樞、場電 阻、樞電阻、電流表、電壓表、量測儀表等實際的實驗設備。實際實驗模 組是提供學習者在接線練習後,所實驗的電機平台與實體接線模組進行連 接,其各種的量測儀表、控制設備、實驗電路與實體電機實驗接線平台的
引導學習模組
操作學習模組 訊號收集模組
SoC
(TM)
(SAM) (OM)
RWSP 接線引導
RWSP 錯誤分析 接點掃瞄
訊號處理
實體接線模組
人工監控
轉換電路
實際實驗模組 直流電壓 直流機電樞 場電阻 樞電阻
電流表 電壓表
V M Rsh Rs 硬體設備
分激場繞組 電樞場繞組
F1
F2
A
V
相對應位置連接。當學習者透過嵌入式晶片的學習教導,而欲進入到監控 模式下,才將系統切換為實體接線模組,以嵌入式晶片來監控診斷學習者 練習的狀況,以免因為不正常操作而造成實際實驗的電機設備與人的危 險。系統面板設計「運作」與「停止」按鈕,學習者按下運作按鈕,系統 進入學習模式,學習者可以選擇切換測試模式或實驗模式,若系統有不正 常動作,可以由面板設計的停止按鈕將系統斷電,以免造成設備損壞。
二、實體接線模組
本模組具有與實際電機實驗平台相同的接線平台(如圖 3-7),讓學習者 可在這介面上做接線的練習與訓練,而且在每一個接線插孔旁加設引導指 示燈,以提供嵌入式專家系統進行教導,讓學習者可依照指示燈的亮、滅 得知接線的步驟程序。接線平台上的插孔是利用香蕉座來製作,而接線練 習用的連接導線是香蕉接頭加上導線所製作而成,在香蕉座的後端連接至 訊號收集模組,利用訊號收集模組的數位輸入/輸出功能,對實驗平台上每 一個插孔的接點,進行循序的檢測,如此可得知平台上那個接點與那些接 點是連接在一起的,以便系統查詢及監控並了解學習者接線狀況。
圖 3-7 實體接線模組(RWSP 實際接線服務面板)
三、訊號收集模組
訊號收集模組扮演著電機實驗接線硬體部分與嵌入式系統資料訊息 的傳遞中介者的角色,其與電機實驗接線硬體部分之間資料傳遞的數位輸 入及輸出(Digital Input/Output;D I/O)的傳輸是經過接線訊號擷取模組獲得 的訊號,是藉由嵌入式晶片規劃發射訊號單元與掃瞄訊號單元來完成。圖 3-8 為數位訊號發射電路示意圖,如圖左側有電晶體驅動電路,內部利用 晶片 Output port 將 2.7~3.2V 的訊號送至電阻調整繼電器介面卡的內部控 制電路去驅動電晶體的基極端,讓電晶體導通動作,令電晶體射極端輸出 高電位訊號,目的是提升輸出訊號讓訊號不易失真,由於引入的電壓是一 個 5 伏特的電壓,如此這就有如一個數位用的輸出,當電晶體 ON 時,就 會由 DO_01~DO_20 的接孔輸出一個 5 伏特的電壓值,達到數位輸出的功 能(DO)。圖中將數位輸出經過轉換電路送到掃瞄電路模組,會有一個訊號 (電壓)進入 DI_01~ DI_20,掃瞄模組上會有高電位訊號輸入而得知為何接 點有訊號輸入,達到數位輸入(DI)的功能。
圖 3-8 數位訊號發射電路示意圖
圖 3-9 是嵌入式晶片與實驗接線模組的硬體連線圖,其主要功能是設 計學習者的接線接點掃瞄,判斷學習者接線過程是否符合專家系統的接線 規則,判斷學習者的接線行為是利用循序的原理,從第一個接點利用電晶 體驅動電路送出一個數位輸出訊號(DO_21~DO_40),同時掃瞄電路會去偵 測每一個接點上的訊號,如因接線的關係使另一接點也發現到有訊號,則
5V
電晶體數位驅動電路
DI 01 DI 20
~
COM COM
C8051F訊號發射 DO 01
DO 20
~
緩 衝 電 路 模 組 3.2V
擷 取 模 組
接 線 訊 號
掃
瞄
電
路
模
組
表示這一個接點與另一個接點是來自相同的訊號源,則系統會將此接點的
接點記錄下來,以便分析及診斷,接著再對第二顆電晶體驅動電路送出一
個數位輸出訊號,再由掃瞄電路去偵測接點訊號,如此反覆,直到所有的
接點都掃瞄,而達到了解學習者的接線行為。舉例說明,當學習者進行接
線監控時,為確保實驗設備安全無虞,在嵌入式晶片上的 DO_41 會輸出
一個訊號使○ SR 繼電器動作,這時候系統就會進入接線監控的狀態與實驗設
備隔離,而嵌入式晶片就會從 DO_01 送出第一個數位輸出訊號,如在
DI_01 及 DI_02 接收到相同的訊號,就表示學習者所連接的這二點就是在
操作練習模組平台上所對應的接孔上,接著再由 DO_02 去送訊號,直到
DO_20 掃瞄完畢再回到 DO_01 繼續送出訊號,如此循序的去做發送訊號
與掃瞄訊號的動作,當學習者連接第二條線路後按下確認鍵,系統仍重複
相同的動作去判斷所對應的接孔,學習者每接一條線路都會進行診斷的機
制,判斷學習者接線是否符合專家系統設定的規則,如果正確或錯誤都會
顯示在訊息模組上告知學習者,當學習者都完成所有線路且系統診斷接線
線路正確後,將系統切換到實驗模式,此時會從實體接線模組轉換到實際
實驗模組,系統會與實驗設備相連接,當學習者送出一個訊號驅動○ CR 繼電
器動作,此時實驗設備就會正常受電,進行相關實驗分析。
圖 3-9 嵌入式晶片與實體接線模組硬體連線圖
V2
V1 A1 A2
V V A A
儀表顯示模組
1 2 3 4 5 6 7 8 9 10 14
R1 R2 R3 R4 R5 R6 R7 R8 R9 R10 R14
18 19 20
R18 R19 R20
SRa
4
1 2 3 5 6 7 8 9 10 11 13 14 15 16 17 18 19 20
15 16 17
R15 R16 R17 R13
13 R11
11 R12
12
12
SRb DO_21
DO_22 DO_23
DO_24 DO_25
DO_26 DO_27
DO_28 DO_29
DO_30 DO_31
DO_32 DO_33
DO_34 DO_35
DO_36 DO_37
DO_38 DO_39
DO_40
測試切換繼電器線圈
繼電器a接點 繼電器b接點 學習者接線平台插孔
電機實驗接線平台LED顯示燈
SR a SR b
MC SR
實驗確認繼電器線圈
電磁接觸器a接點 MC
CR
電磁接觸器線圈
3.2V
DI_21 ~ DI_40 DO_01 DO_02 DO_03 DO_04 DO_05 DO_06 DO_07 DO_08 DO_09 DO_10 DO_11 DO_12 DO_13 DO_14 DO_15 DO_16 DO_17 DO_18 DO_19 DO_20
數位輸出發射電路 COM C1
C2 C3
C4 C5
C6 C7
C8 C9
C10 C11
C12
C13 C14
C15 C16
C17 C18
C19 C20 DI_21 ~ DI_40
AC 220V
MCa OFF
ON
MC MCb
實驗 供電
停止 測試
CR CS
CR
實 測
供電確認
RL GL
F1
測試
實驗
DC 24V
SR P
N DC Power V MR
MRa
COM DI_01 DI_02 DI_03 DI_04 DI_05 DI_06 DI_07 DI_08 DI_09 DI_10 DI_11 DI_12 DI_13 DI_14 DI_15 DI_16 DI_17 DI_18 DI_19 DI_20
數 位 輸 入 掃 瞄 電 路
SoC MCU
CR
測試:指系統設備在未受電狀態下 實驗:指系統設備進行受電狀態下(數據分析)
TR 直流電壓調節器
AC DC
1~20
Port_1 Port_3 Low sbit Port_2
F2 Port_4Port_5Port_3 High sbit
診斷操作流程:從DO_01→DO_02→…→DO_20連續不斷地發送高位訊號 ,假設 DI_01或DI_02或…或DI_20接收到一個高位訊號(如DO_02=DI_05),表示數位輸出 DO_02發出的高位訊號被數位輸入DI_05接收,表示這兩點由學習者經外部面板的 插孔相互連接。
P N M R_JK R_EF Rsh Rs
M
電場電阻 調整電路
電樞電阻 調整電路 儀表顯示模組
Port_7 LED引導閃爍燈
控制模組
SoC MCU
P N A H J K E F Rsha Rshb Rsa Rsb V1P V1N V2P V2N A1P A1N A2P A2N
A2N A2P A1N A1P V2N V2P V1N V1P Rsha Rshb Rsa Rsb P N A J H K E F
四、LED 閃爍燈電路模組
LED 閃爍燈電路是對於學習者將系統切換在引導學習模式下,由系統 的燈號閃爍引導學習者進行接線,同一時間系統會閃爍兩個燈號,引導學 習者去接相對應的插孔,當學習者正確連接兩個相對應的接點後,系統會 自行偵測這兩點是否已經短路,如果診斷結果這兩點已經短路,表示學習 者接線正確,系統會再進行下一步驟的引導,重新閃爍兩個燈號引導學習 者接線,直至完成一項電機實驗接線的流程;如果診斷結果錯誤,表示學 習者接錯相對應的插孔,系統會重新引導學習者接線,直至學習者正確接 線為止,表 3-1 為 SoC 晶片對閃爍燈 LED 電路模組編碼對照表。
表 3-1 閃爍燈 LED 電路模組編碼表
說明:設定SoC晶片的Port 7為總管實際接線服務面板所有LED的編碼,將SoC的P7資訊送到 AT89S52的P3去編碼,再比對P3編碼的LED閃爍燈代號,由P0、P1、P2控制LED閃爍燈指引 學習者接線過程。
LED代號碼(SoC部分) [由Port 7輸出訊號]
編碼 接腳名稱 編碼 接腳名稱 編碼 接腳名稱
0x01 V1+ 0x09 P 0x0F N
0x02 V1- 0x0A A 0x10 H
0x03 V2+ 0x0B J 0x11 K
0x04 V2- 0x0C E 0x12 F
0x05 A1+ 0x0D Rsh_a 0x13 Rsh_b 0x06 A1- 0x0E Rs_a 0x14 Rs_b 0x07 A2+
0x08 A2- P7=0xFF表示關閉所有指示燈
LED代號碼(AT89S52部分) [由Port 3接收訊號]
編碼 接腳代碼 接腳名稱 編碼 接腳代碼 接腳名稱 編碼 接腳代碼 接腳名稱
P3=0x01 P1.0 V1+ P3=0x09 P0.0 P P3=0x0F P2.0 N P3=0x02 P1.1 V1- P3=0x0A P0.1 A P3=0x10 P2.1 H P3=0x03 P1.2 V2+ P3=0x0B P0.2 J P3=0x11 P2.2 K P3=0x04 P1.3 V2- P3=0x0C P0.3 E P3=0x12 P2.3 F P3=0x05 P1.4 A1+ P3=0x0D P0.4 Rsh_a P3=0x13 P2.4 Rsh_b P3=0x06 P1.5 A1- P3=0x0E P0.5 Rs_a P3=0x14 P2.5 Rs_b P3=0x07 P1.6 A2+
P3=0x08 P1.7 A2-
當P3接收到外部訊號0xFF關閉所有指示燈動作
If(P3==0xFF) then(P0=P1=P2=0xFF)
五、電阻調整繼電器模組
電阻調整繼電器模組內有 8 組可被一個位元組的獨立資料所控制的線 圈接點如圖 3-10 所示,模組的外觀上有 8 對接孔,這些接孔的內部再連接 到線圈接點的接點上,每一對接點的狀態動作時會由一個發光二極體顯示 出來,當指示燈亮時表示接點閉合,反之為接點打開。其使用方法是當模 組被定址當收聽時,它會接收一個位元組的獨立資料,這個位元組有 8 個 位元去控制電阻調整繼電器模組的 8 個線圈接點,其控制方式如要使 1、
4、7 接點閉合,就必須將 2+16+128=146 送到繼電器模組。
圖 3-10 電阻調整繼電器模組外觀圖
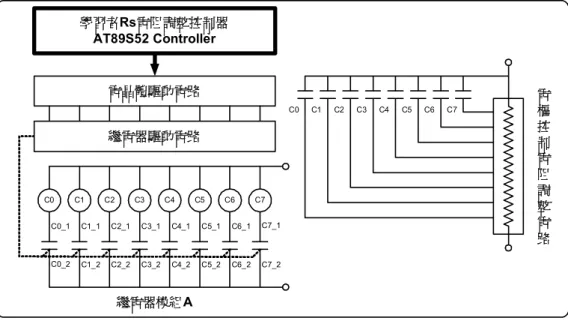
六、操作面板電阻調整顯示模組
操作面板電阻調整顯示模組(如圖 3-11 所示)主要是由真實的可調按鈕 開關、七段顯示器、電阻調整繼電器模組與單晶片控制模組製作(如圖 3-12 所示),以數位控制的方式應用在 Rs 電樞控制電阻(8 段電阻值調整)與 Rsh 電場控制電阻(16 段電阻值調整),學習者可以藉由提升電阻值與降低電阻 值來進行電動機轉速特性實驗。舉例說明,以直流分激電動機電阻速率控 制法為例,系統啟動時會預設電阻值在最大的範圍上,此時電動機轉速最 低,當學習者在面板上按下提升鍵或降低鍵時,會將學習者的操作指示送
C0
C1
C2
C3
C4
C6 C5
C7
Relay 0 1
2
4
8
16
32
64
128 繼電器模組
Relay 1
Relay 2
Relay 3
Relay 4
Relay 5
Relay 6
Relay 7
電 驛 號 碼
相
對
應
電
驛
代
表
數
字
至操作調整顯示器上顯示出來,顯示學習者操作電阻值調整的段數,同時 由於電阻值的變化會改變電流值大小,所以當學習者調整電阻值就會使流 進電樞繞組的線圈產生感應,若將電阻值調高,則電動機轉速下降,是因 為電阻值與電動機轉速成反比關係。
圖 3-11 操作面板電阻調整顯示模組
圖 3-12 電阻調整繼電器模組
圖 3-11 操作面板核心是以 8051 單晶片為基底之調整控制器,將學習 者欲提升之電阻值或降低電阻值的指示擷取出來,將欲切換的資料送到模 組上進行電樞控制電阻值和電場控制電阻值的切換,如欲使電阻調整繼電 器模組 A 的 C0 外部繼電器動作,則模組上的內部繼電器 C0 必須動作使 C0_1 與 C0_2 接點短路,此時外部繼電器才會受電,學習者每調整一次電 阻值,會使一組繼電器動作,繼電器動作同時會顯示相對應的指示燈,讓 學習者清楚電阻值調整的段數。 Rs 電樞控制電阻調整需使用一組繼電器模 組, Rsh 電場控制電阻調整需使用兩組繼電器模組,Rs 電樞控制電阻調整
C20
C21
C22
C23
C24
C26 C25
C27
C20_1 C20_2
繼電器模組C
C21_1
C22_1
C23_1
C24_1
C25_1
C26_1
C27_1
C21_2
C22_2
C23_2
C24_2
C25_2
C26_2
C27_2 C10
C11
C12
C13
C14
C16 C15
C17
C10_1 C10_2
C11_1
C12_1
C13_1
C14_1
C15_1
C16_1
C17_1
C11_2
C12_2
C13_2
C14_2
C15_2
C16_2
C17_2
繼電器模組B
C0
C1
C2
C3
C4
C6 C5
C7
C0_1 C0_2
C1_1
C2_1
C3_1
C4_1
C5_1
C6_1
C7_1
C1_2
C2_2
C3_2
C4_2
C5_2
C6_2
C7_2
繼電器模組A
圖 3-13 Rs 電樞控制電阻調整接線圖
圖 3-14 Rsh 電場控制電阻調整接線圖
C0 C1 C2 C3 C4 C5 C6 C7
電 樞 控 制 電 阻 調 整 電 路 電晶體驅動電路
繼電器模組A 學習者Rs電阻調整控制器
AT89S52 Controller
C0 C1 C2 C3 C4 C5 C6 C7
C0_1 C1_1 C2_1 C3_1 C4_1 C5_1 C6_1 C7_1
C0_2 C1_2 C2_2 C3_2 C4_2 C5_2 C6_2 C7_2
繼電器驅動電路
電晶體驅動電路
繼電器模組B
C10 C11 C12 C13 C14 C15 C16 C17 C10_1
電晶體驅動電路
繼電器模組C 繼電器驅動電路
C20 C21 C22 C23 C24 C25 C26 C27 C11_1 C12_1 C13_1 C14_1 C15_1 C16_1 C17_1 C20_1 C21_1 C22_1 C23_1 C24_1 C25_1 C26_1 C27_1
C10_2 C11_2C12_2 C13_2 C14_2 C15_2 C16_2 C17_2 C20_2 C21_2 C22_2 C23_2 C24_2 C25_2 C26_2 C27_2
學習者 Rsh電阻調整控制器 AT89S52 Controller
C27 C26 C25 C24 C23 C22 C21 C20 C16 C17 C15 C14 C13 C12 C11 C10
電
場
控
制
電
阻
調
整
電
路
繼電器驅動電路
第四節 專家系統設計
一、專家系統
本研究所發展的嵌入式專家系統設計係做為電機實驗接線的即時診 斷、輔助教學,包括監督學習者的接線實驗程序、引導學習者的接線實驗 程序、說明接線實驗正確的接線實驗程序、說明接線實驗錯誤的接線實驗 程序、解釋接線實驗程序為何錯誤、系統引導如何正確接線並診斷實驗接 線程序的正確性等。本研究專家系統發展之流程包括問題確認、知識擷 取、專家系統知識庫建立、系統設置與評估、系統測試,如圖 3-15 所示為 專家系統發展流程,分述如下:
圖 3-15 電機實驗接線專家系統發展之流程
1. 問題確認:
發展專家系統的第一步驟就是確認用途,而本研究利用專家系統的目 的是用來教導電機實驗接線練習,其主要目的是用來引導電機實驗的學習 者實驗的訓練,診斷學習者學習的過程,以做為教師調整電機實驗的教導 策略,提供學習者做為下一次實驗時改進的方向,因此本研究發展的嵌入 式專家系統設計所設定的問題範圍領域如下所示:
(a) 監督學習者的接線實驗程序。
(b) 引導學習者的接線實驗程序。
問題確認
知識擷取
系統設置與評估 專家系統知識庫建立
系統測試
(d) 說明接線實驗錯誤的接線實驗程序。
(e) 解釋接線實驗程序為何錯誤。
(f) 系統引導如何正確接線並診斷實驗接線程序的正確性。
2. 知識擷取:
知識擷取的目標是將專業領域的知識轉換成知識庫或是其他表達的 形式,一般擷取知識的方法有以下三種:
(a) 藉由有經驗的知識工程師對專家進行問題訪談,但較耗費時間。
(b) 藉由機器學習,直接從專家提供的訓練範例中歸納推論規則。
(c) 藉由擷取系統,知識擷取系統直接和專家進行訪談。
確認專家系統之目的後,便要擷取知識去建立知識庫了,由於人的思 考是複雜多變的,因此本研究招開四次專家會議,集合本領域專家,依本 研究所需之目的,萃取他們的經驗與專家知識,以期獲得學習者在學習上 的行為模式與電機實驗接線上的步驟與要點。
3. 專家系統知識庫建立:
建構嵌入式專家系統設計,可以用程式語言來發展和套裝軟體工具來 發展專家推論的機制。本研究擬定藉由 Keil C 為撰寫系統晶片程式,以 CLIPS 語法為開發專家知識軟體來撰寫知識的學習及推論的規則,建立專 家系統知識庫,統整專家系統所列的專家知識,知識庫是依專家所擷取出 的知識及經驗,依據推論結果建立出以 And-Or-Tree 為發展基礎,來做為 專家系統的知識庫。
4. 系統評估與設置:
為了要評估專家系統知識庫是否完善,研究者以招開專家會議的方式 來進行探討及修訂,當專家系統的穩定度經過測試,即可正式啟用於電機 實驗接線教導系統之中。
5. 系統測試:
當上述流程均完成時,即正式由學習者測試電機實驗接線系統。
二、專家系統知識庫之建構
本研究發展專家系統來診斷、引導電機實驗的接線過程,所以將電機 實驗接線的接線任務建立於知識庫中,其任務採用任務分析法訂定之,經 過分析建立具專家知識診斷的 And-Or-Tree,並召開專家會議審核專家規 則確認其完整性。如圖 3-16 所示為整個電機實驗接線的專家系統診斷之 And-Or-Tree,在整個系統的診斷方式,會先依學習者所學習或練習的接線 實驗方式的不同,而使用不同的診斷規則。
圖 3-16 專家系統診斷電機實驗接線之 And-Or-Tree
引導學習接線診斷 操作學習接線診斷
嵌入式專家系統接線診斷
OR 規
則 六
: 接 線 規 則 庫 規
則 一
: 引 導 分 激 式 電 機 實 驗 接 線 規 則 庫
規 則 二
: 引 導 長 並 聯 積 複 激 式 電 機 實 驗 接 線 規 則 庫
規 則 三
: 引 導 長 並 聯 差 複 激 式 電 機 實 驗 接 線 規 則 庫
OR
短 並 聯 積 複 激 式 電 機 實 驗 接 線 規 則 庫
短 並 聯 差 複 激 式 電 機 實 驗 接 線 規 則 庫 OR
固定模式
規 則 七
: 錯 誤 接 線 診 斷 規 則 庫 OR
開放模式
規 則 四
: 引 導 短 並 聯 積 複 激 式 電 機 實 驗 接 線 規 則 庫
規 則 五
: 引 導 短 並 聯 差 複 激 式 電 機 實 驗 接 線 規 則 庫
分 激 式 電 機 實 驗 接 線 規 則 庫
長 並 聯 積 複 激 式 電 機 實 驗 接 線 規 則 庫
長
並
聯
差
複
激
式
電
機
實
驗
接
線
規
則
庫
在引導學習接線診斷的模式下,學習系統設計了五種電動機實體接線 實驗的引導,分別為:(1)引導分激式電機實驗、(2)引導長並聯積複激式電 機實驗、 (3)引導長並聯差複激式電機實驗、(4)引導短並聯積複激式電機實 驗、(5)引導短並聯差複激式電機實驗,表 3-2 為本系統各項電機實驗接線 之元件示意圖。圖 3-17(a)、3-17(b)、3-17(c)、3-17(d)、3-17(e)分別為分激 式、長並聯積複激式、長並聯差複激式、短並聯積複激式、短並聯差複激 式電機實驗接線圖。學習者在系統切換至引導學習模式下,會依照接線步 驟逐一顯示正確接線的引導指示燈及接點位置,學習者每接一條線路都會 經過訊號掃瞄模組將訊號擷取出來,再將處理過的訊號經由專家系統診 斷,系統診斷正確會出現下一步驟接線的指示燈及接點位置,若診斷錯誤 會有錯誤訊息顯示,讓學習者瞭解線路錯誤的情況。
表 3-2 電機實驗接線之元件示意圖
A1 A2
V1 V2
Rs
Rsh
E F
J K
設 備 圖 示 功 能 說 明
電樞控制電阻
電場控制電阻
電樞場繞組
分激場繞組
輸入電壓(P正端、N負端)
電樞元件
電流量測儀表
電壓量測儀表
P N
M
A H
(a)
(b) (c)
(d) (e) 圖 3-17 分激式與複激式電機實驗接線圖
長並聯複激式電動機(差複激) Rsh
J
K
P
N F
E
A2
V1
V2 A1
M A
H Rs
長並聯複激式電動機(積複激) Rsh
J
K
P
N E
F
A2
V1
V2 A1
M A
H Rs
短並聯複激式電動機(積複激) Rsh
E
F
J
K
P
N A2
V1
V2 A1
M A
H Rs
短並聯複激式電動機(差複激) Rsh
F
E
J
K
P
N A2
V1
V2 A1
M A
H Rs 分激式電動機
J
K Rsh
P
N A2
V1
V2 A1
M A
H
Rs
學習者在進行引導學習訓練時,系統會依學習者所接線的動作進行診
斷,如果學習者接線動作正確,診斷系統會要求學習者進行引導下一接線
步驟及接點位置,如此反覆,直到接線訓練完成。圖 3-18、圖 3-19、圖
3-20、圖 3-21、圖 3-22 分別為引導分激式、引導長並聯積複激式、引導長
並聯差複激式、引導短並聯積複激式、引導短並聯差複激式電機實驗接線
診斷規則庫之設計圖。
圖 3-18 引導分激式電機實驗接線診斷規則庫之設計圖
引導分激式電機實驗 接線診斷規則庫
電源P接至電流表A1P
電樞控制電阻Rsa接至電流表A1N
電樞控制電阻Rsb接至電流表A2P
電流表A2N接至電樞A
電樞H接至電源N
電壓表V1P接至電樞A
電壓表V1N接至電樞H
電場控制電阻Rsha接至電流表A1N
電場控制電阻Rshb接至分激場繞組J
分激場繞組K接至電源N
電壓表V2P接至分激場繞組J
電壓表V2N接至分激場繞組K
完成引導分激式電機實驗接線
(圖 3-19) (圖 3-20)
圖 3-19 引導長並聯積複激式電機實驗接線診斷規則庫之設計圖 圖 3-20 引導長並聯差複激式電機實驗接線診斷規則庫之設計圖
引導長並聯積複激式電機實驗 接線診斷規則庫
電源P接至電流表A1P
電樞控制電阻Rsa接至電流表A1N
電樞控制電阻Rsb接至電樞場繞組E
電流表A2N接至電樞A
電樞H接至電源N
電壓表V1P接至電樞A
電壓表V1N接至電樞H
電場控制電阻Rsha接至電流表A1N
電場控制電阻Rshb接至分激場繞組J
分激場繞組K接至電源N
電壓表V2P接至分激場繞組J
電壓表V2N接至分激場繞組K
完成引導長並聯積複激式 電機實驗接線 電樞場繞組F接至電流表A2P
引導長並聯差複激式電機實驗 接線診斷規則庫
電源P接至電流表A1P
電樞控制電阻Rsa接至電流表A1N
電樞控制電阻Rsb接至電樞場繞組F
電流表A2N接至電樞A
電樞H接至電源N
電壓表V1P接至電樞A
電壓表V1N接至電樞H
電場控制電阻Rsha接至電流表A1N
電場控制電阻Rshb接至分激場繞組J
分激場繞組K接至電源N
電壓表V2P接至分激場繞組J
電壓表V2N接至分激場繞組K
完成引導長並聯差複激式
電機實驗接線
電樞場繞組E接至電流表A2P
(圖 3-21) (圖 3-22)
圖 3-21 引導短並聯積複激式電機實驗接線診斷規則庫之設計圖 圖 3-22 引導短並聯差複激式電機實驗接線診斷規則庫之設計圖
電源P接至電流表A1P
電樞控制電阻Rsa接至電流表A1N
電樞控制電阻Rsb接至電樞場繞組E
電流表A2N接至電樞A
電樞H接至電源N
電壓表V1P接至電樞A
電壓表V1N接至電樞H
電場控制電阻Rsha接至電樞場繞組F
場電阻K接至電源N 電樞場繞組F接至電流表A2P 引導短並聯積複激式電機實驗
接線診斷規則庫
電壓表V2P接至分激場繞組J
電壓表V2N接至分激場繞組K 電場控制電阻 Rshb接至分激場繞組J
完成引導短並聯積複激式 電機實驗接線
電源P接至電流表A1P
電樞控制電阻Rsa接至電流表A1N
電樞控制電阻Rsb接至電樞場繞組F
電流表A2N接至電樞A
電樞H接至電源N
電壓表V1P接至電樞A
電壓表V1N接至電樞H
電場控制電阻Rsha接至電樞場繞組F
場電阻K接至電源N 電樞場繞組E接至電流表A2P 引導短並聯差複激式電機實驗
接線診斷規則庫
電壓表V2P接至分激場繞組J
電壓表V2N接至分激場繞組K 電場控制電阻Rshb接至分激場繞組J
完成引導短並聯差複激式
電機實驗接線
學習者若選擇引導學習的模式,學習者在訓練的過程中,會依照系統 的指示引導進行訓練,如圖 3-18、圖 3-19、圖 3-20、圖 3-21、圖 3-22 的 接線流程方塊,學習者透過服務面板的 LED 閃爍燈指示進行接線動作,
學習者只要接完一條線路,系統即會自行診斷、分析學習者接線的正確 性,如果一個步驟接線錯誤,系統就會再一次引導學習者接線,等待學習 者將錯誤修正,才能進行下一步驟的流程方塊的接線,直至完成一套電機 實驗接線。
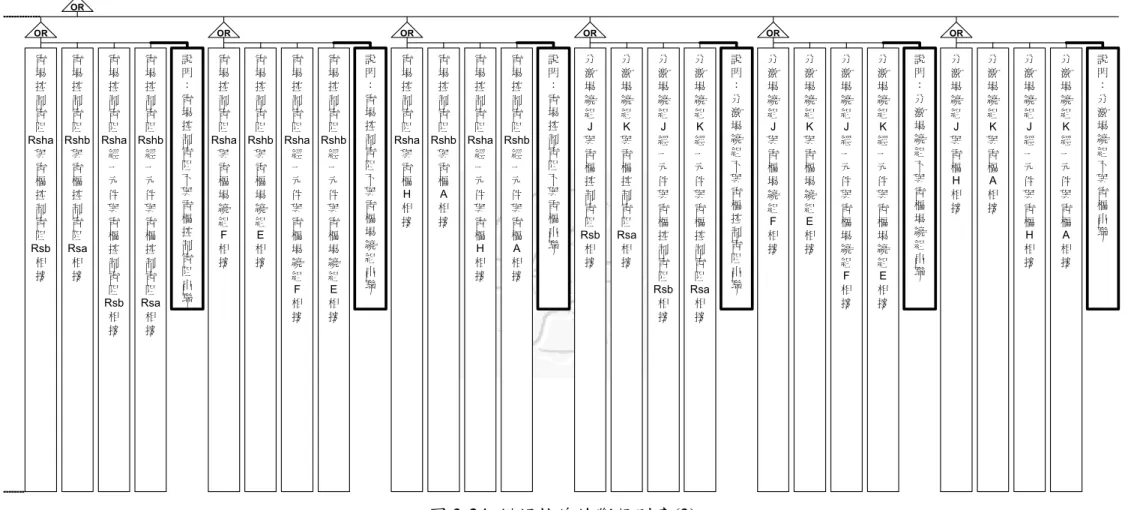
學習者在進行操作學習訓練時,只要學習者按下「接線確認」的功能
按鈕後,專家系統就會依實驗接線規則(實驗接線診斷規則庫如圖 3-23 所
示)來對學習者所接的線路進行診斷,如果不為分激式電機實驗、長並聯積
複激式電機實驗、長並聯差複激式電機實驗、短並聯積複激式電機實驗或
短並聯差複激式電機實驗的接線時,專家系統會將錯誤接線診斷出來,進
而診斷學習者所練習的實驗接線為何種錯誤,顯示出來讓學習者可以明白
錯誤的地方。如當學習者進行開放模式時,學習者則可依系統所提供的元
件去組合出所想要的電機實驗接線,其後由專家系統進行分析此線路接線
狀態並診斷其錯誤,適時提供學習者接線錯誤的資訊(錯誤接線診斷規則庫
如圖 3-24 所示)。
圖 3-23 實驗接線診斷規則庫(1)
實驗接線規則庫
OR AND電 源 P
, 電 流 表 A1P
為 同 一 接 點
電 流 表 A1N
, 電 樞 電 阻 Rsa
, 電 場 電 阻 Rsha
, 為 同 一 接 點 電 源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 為 同 一 接 點
電 樞 電 阻 Rsb
, 電 流 表 A2P
, 為 同 一 接 點
電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 為 同 一 接 點
電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
, 為 同 一 接 點
說 明
: 線 路 為 長 並 聯 複 激 式 電 機 實 驗 接 線 說
明
: 線 路 為 分 激 式 電 機 實 驗 接 線
AND
電 源 P
, 電 流 表 A1P
為 同 一 接 點
電 流 表 A1N
, 電 樞 電 阻 Rsa
, 電 場 電 阻 Rsha
, 為 同 一 接 點 電 源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 為 同 一 接 點
電 樞 電 阻 Rsb
, 場 繞 組 E
, 為 同 一 接 點
電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 為 同 一 接 點
電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
, 為 同 一 接 點 場
繞 組 F
, 電 流 表 A2P
, 為 同 一 接 點
說 明
: 線 路 為 短 並 聯 複 激 式 電 機 實 驗 接 線
AND電 源 P
, 電 流 表 A1P
為 同 一 接 點
電 流 表 A1N
, 電 樞 電 阻 Rsa
, 為 同 一 接 點 電 源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 為 同 一 接 點
電 樞 電 阻 Rsb
, 場 繞 組 E
, 為 同 一 接 點
電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 為 同 一 接 點
電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
, 為 同 一 接 點 場
繞 組 F
, 電 流 表 A2P
, 電 場 電 阻 Rsha
,
為
同
一
接
點
圖 3-23 實驗接線診斷規則庫(2)
線 路 為 長 並 聯 複 激 式 電 機 實 驗 接 線
AND
電 源 P
, 電 流 表 A1P
, 不 為 同 一 接 點
電 流 表 A1N
, 電 樞 電 阻 Rsa
, 電 場 電 阻 Rsha
, 不 為 同 一 接 點 電
源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 不 為 同 一 接 點
電 樞 電 阻 Rsb
, 場 繞 組 E
, 不 為 同 一 接 點
電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 不 為 同 一 接 點
電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
, 不 為 同 一 接 點 場
繞 組 F
, 電 流 表 A2P
, 不 為 同 一 接 點 實驗接線規則庫
OR
電 源 P
, 電 流 表 A1P
, 不 為 同 一 接 點
電 流 表 A1N
, 電 樞 電 阻 Rsa
, 電 場 電 阻 Rsha
, 不 為 同 一 接 點 電
源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 不 為 同 一 接 點
電 樞 電 阻 Rsb
, 電 流 表 A2P
, 不 為 同 一 接 點
電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 不 為 同 一 接 點
電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
, 不 為 同 一 接 點
OR線 路 為 分 激 式 電 機 實 驗 接 線
AND AND AND AND AND AND
說 明
: 電 源 P
, 電 流 表 A1P
, 應 接 在 同 一 點
說 明
: 電 源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 應 接 在 同 一 點
說 明
: 電 流 表 A1N
, 電 樞 電 阻 Rsa
, 電 場 電 阻 Rsha
, 應 接 在 同 一 點
說 明
: 電 樞 電 阻 Rsb
, 電 流 表 A2P
, 應 接 在 同 一 點
說 明
: 電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 應 接 在 同 一 點
說 明
: 電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
, 應 接 在 同 一 點
OR
說 明
: 電 源 P
, 電 流 表 A1P
, 應 接 在 同 一 點
AND
說 明
: 電 源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 應 接 在 同 一 點
AND
說 明
: 電 流 表 A1N
, 電 樞 電 阻 Rsa
, 電 場 電 阻 Rsha
, 應 接 在 同 一 點
AND
說 明
: 電 樞 電 阻 Rsb
, 場 繞 組 E
, 應 接 在 同 一 點
說 明
: 場 繞 組 F
, 電 流 表 A2P
, 應 接 在 同 一 點
AND AND AND
說 明
: 電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 應 接 在 同 一 點
說 明
: 電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
,
應
接
在
同
一
點
圖 3-23 實驗接線診斷規則庫(3)
線 路 為 短 並 聯 複 激 式 電 機 實 驗 接 線
AND
電 源 P
, 電 流 表 A1P
, 不 為 同 一 接 點
電 流 表 A1N
, 電 樞 電 阻 Rsa
, 不 為 同 一 接 點 電
源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 不 為 同 一 接 點
電 樞 電 阻 Rsb
, 場 繞 組 E
, 不 為 同 一 接 點
電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 不 為 同 一 接 點
電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
, 不 為 同 一 接 點 場
繞 組 F
, 電 流 表 A2P
, 場 電 阻 Rsha
, 不 為 同 一 接 點
OR說 明
: 電 源 P
, 電 流 表 A1P
, 應 接 在 同 一 點
AND
說 明
: 電 源 N
, 電 樞 H
, 場 繞 組 K
, 電 壓 表 V1N
, 電 壓 表 V2N
, 應 接 在 同 一 點
AND
說 明
: 電 流 表 A1N
, 電 樞 電 阻 Rsa
, 應 接 在 同 一 點
AND
說 明
: 電 樞 電 阻 Rsb
, 場 繞 組 E
, 應 接 在 同 一 點
說 明
: 場 繞 組 F
, 電 流 表 A2P
, 場電
阻 Rsha
, 應 接 在 同 一 點
AND AND AND
說 明
: 電 流 表 A2N
, 電 樞 A
, 電 壓 表 V1P
, 應 接 在 同 一 點
說 明
: 電 場 電 阻 Rshb
, 場 電 阻 J
, 電 壓 表 V2P
, 應 接 在 同 一 點 實驗接線規則庫
OR
圖 3-24 錯誤接線診斷規則庫(1)
錯誤接線診斷規則庫 OR
元 件 僅 有 單 端 接 線
說 明
: 元 件 僅 有 單 端 端 接 線
同 一 元 件 二 端 相 接
說 明
: 元 件 短 路
OR 電 源 P 與
X 元 件 的 負 端 相 接 電 場 電 阻 及 電 樞 電 阻 除 外
】 【
電 源 N 與 X 元 件 的 正 端 相 接 電 場 電 阻 及 電 樞 電 阻 除 外
】 【
說 明
: X 元 件 極 性 與 電 源 極 性 不 符 合
OR
電 流 表 正 端 AP 的 接 點 有 P 端 點
電 流 表 負 端 AN 的 接 點 有 N 端 點 AND
電 流 表 負 端 AN
的 接 點 有 X 物 件 的 負 端 點 AND
電 流 表 正 端 AP 的 接 點 有 X 物 件 的 正 端 點
電 流 表 正 端 AP 接 點 上 的 接 點 數 大 於 2 AND
電 流 表 負 端 AN
的 接 點 有 N 端 點
電 流 表 正 端 AP 接 點 上 的 接 點 數 大 於 2
電 流 表 正 端 AP 接 點 上 的 元 件 需 有 一 正 端 和 一 負 端
電 流 表 負 端 AN 接 點 上 的 接 點 數 大 於 2 AND
電 流 表 負 端 AN 接 點 上 的 元 件 需 有 一 正 端 和 一 負 端
說 明
: 電 流 表 不 能 並 聯 元 件 電
流 表 負 端 AN 接 點 上 的 接 點 數 大 於 2 AND
電 流 表 正 端 AP 的 接 點 有 P 端 點 無
接 線 動 作
說 明
: 線 路 初 始 化
,
請
執
行
接
線
動
作
圖 3-24 錯誤接線診斷規則庫(2)
錯誤接線診斷規則庫 OR OR
電 壓 表 正 端 V1P
與 一 元 件 的 負 端 相 接
AND AND 說
明
: 電 壓 表 與 元 件 極 性 接 錯
OR
電 壓 表 正 端 VP 不 接 電 源 P
AND AND 說
明
: 電 壓 表 不 與 元 件 串 聯 電
壓 表 正 端 V1N
與 一 元 件 的 正 端 相 接
電 壓 表 正 端 V2P
與 一 元 件 的 負 端 相 接
電 壓 表 正 端 V2N
與 一 元 件 的 正 端 相 接
電 壓 表 負 端 VN 不 接 電 源 N 電 壓 表 正 端 VP 只 有 接 一 個 元 件
電 壓 表 負 端 VN 只 有 接 一 個 元 件
OR
電 場 控 制 電 阻 Rsha
與 場 繞 組 J 相 接
AND 說
明
: 電 場 控 制 電 阻 不 與 分 激 場 繞 組 並 聯 電 場 控 制 電 阻 Rshb
與 場 繞 組 K 相 接
OR
電 樞 控 制 電 阻 Rsa
與 場 繞 組 E 相 接
AND 說
明
: 電 樞 控 制 電 阻 不 與 電 樞 場 繞 組 並 聯 電 樞 控 制 電 阻 Rsb
與 場 繞 組 F 相 接
OR
電 樞 控 制 電 阻 Rsa
與 電 場 控 制 電 阻 Rsha
相 接
AND 說
明
: 電 樞 控 制 電 阻 不 與 電 場 控 制 電 阻 並 聯 電 樞 控 制 電 阻 Rsb
與 電 場 控 制 電 阻 Rshb
相 接
OR
電 樞 場 繞 組 E 與 分 激 場 繞 組 J 相 接
AND 說
明
:
電
樞
場
繞
組
不
與
分
激
場
繞
組
並
聯
電
樞
場
繞
組
F
與
分
激
場
繞
組
K
相
接
圖 3-24 錯誤接線診斷規則庫(3)
錯誤接線診斷規則庫
OROR
電 場 控 制 電 阻 Rsha
與 電 樞 控 制 電 阻 Rsb
相 接
說 明
: 電 場 控 制 電 阻 不 與 電 樞 控 制 電 阻 串 聯
OR
說 明
: 電 場 控 制 電 阻 不 與 電 樞 場 繞 組 串 聯
OR
說 明
: 電 場 控 制 電 阻 不 與 電 樞 串 聯
OR OR OR