文章编号: 100220446 (2003) 0420367206
全柔性机器人机构的结构构型研究
Ξ于靖军 , 宗光华 , 毕树生
(北京航空航天大学机器人研究所 北京 100083 )
摘 要: 本文对全柔性机器人机构的结构构型问题进行了系统的讨论:首先从应用层面上对全柔性机器人机 构进行了分类,着重讨论了并联机构与全柔性机器人机构之间存在的有机联系. 通过对并联机构的结构及柔性铰链 的几何模型进行系统的总结,为全柔性机器人机构“型”的选择与构筑提供了丰富的素材. 此外,还重点讨论了对全 柔性机器人机构的性能产生较为显著影响的结构布局问题.
关键词: 全柔性机构;柔性铰链;结构构型;并联机构;机器人 中图分类号: T P 24 文献标识码: B
FULLY COM PL IANT RO BO T IC M ECHAN ISM S AND THE IR CO NF IGURAT IO NS
YU J ing2jun, ZON G Guang2hua, B I Shu2sheng
(R obotics R esea rch I nstitu te,B eij ing U n iv. of A eronau tics and A strnau tics,B eij ing100083, C h ina)
Abstract: T h is p ap er aim s at a class of novel m echan ism s, i. e. fu lly com p lian t robo tic m echan ism s and their st ructu ra l co nfigu ra t io n s. F irst ly, these m echan ism s a re cla ssified acco rd ing to their d ifferen t app lica t io n s, and the rela t io n sh ip betw een th is m echan ism and the p a ra llel a rch itectu re is a lso d iscu ssed. T h ro ugh the summ a riza t io n s fo r the co nfigu ra t io n s o f cu rren t p a ra llel a rch itectu res and geom et rica l m o dels o f a ll k ind s o f flexu re h inges, a la rge am o un t o f m a teria l w h ich is u sed in the cho ice and co n st ruct io n o f fu lly com p lian t ro bo t ic m echan ism can be o b2 ta ined. A t the som et im e, the st ructu ra l d ist ribu t io n abo u t fu lly com p lian t ro bo t ic m echan ism s is p a id m o re a t ten2 t io n since it m ay heav ily influence the cha racterist ics o f the m echan ism.
Keywords: fu lly com p lian t m echan ism , flexu re h inge, co nfigu ra t io n, p a ra llel m echan ism , ro bo t
1
引言
( In troduction )很多领域, 如生物细胞微操作、微电子装配及光纤对 接等, 对微操作机器人的运动精度提出了很高的要求. 作 为微操作机器人中重要的组成部分, 机构本体不仅用于将 驱动器的运动传递给末端执行器的运动, 同时, 它也可能 成为机器人中的主要误差源, 从而影响机器人高精度的实 现. 因此, 有必要提出一种可免于回差及摩擦的新概念应 用到微操作机器人的结构设计中. 基于柔性铰链的全柔性 机器人机构(Fu lly Com p lian t Robo tic M echan ism 简 称 FCRM ) 应运而生.
全柔性机器人机构是一种具有复杂结构的柔性
机构[ 1 ]. 它通过用柔性铰链代替所对应的全部传 统
铰链, 并利用柔性铰链的变形产生运动. 该类机构可 设计成一体化的结构, 进而在降低制造与装配成本 的同时还可实现很高的定位精度.
在机构学领域, 首先讨论的一个问题就是机构 结构即所谓的“型”. 因为它是我们进一步进行研究 的基础. 考虑到全柔性机器人是一种新型机构, 目前 虽然应用较多, 但国内外尚无对其结构构型问题进 行过系统研究. 鉴于此, 本文将对此问题重点讨论.
尽管全柔性机器人机构实质上是结构体, 但考 虑其拓扑结构的特殊性, 构成全柔性机构的基本元 素仍可看作是构件和运动副, 为了更具针对性, 通常 在提法上用柔性铰链代替运动副. 因此, 研究全柔性
2003 7 J u ly, 2003
Ξ 基金项目:国家自然科学基金资助项目(59775002和50075010) ; 863高技术资助项目(863- 512- 98- 04- 27).
收稿日期: 2002- 12- 16
机器人机构的“型”首先就从这两个元素开始.
本文的主要内容包括: 首先从应用层面上对全 柔性机器人机构进行了分类, 考虑到并联结构的一 些特点正好加强和弥补了柔性机构的优点与不足, 这里着重讨论了并联机构与全柔性机器人机构之间 的有机联系, 并通过对现有并联机构结构汇总, 为全 柔性机器人机构的选型提供参考. 还对现有柔性铰 链进行了分类讨论, 最后对全柔性机器人机构“型”
的选用与设计问题进行了重点讨论.
2
全 柔 性 机 器 人 机 构 的 结 构 分 类
( FCRM Ca ta log)从全柔性机器人机构在各个领域应用的层面上 看, 其结构形式沿着两个不同的方向发展: 一个方向 是平面分布式全柔性机器人机构, 另一个方向则是 空间整体式全柔性机器人机构. 两者的区别如表 1 所示:
从机构设计角度, 整体式全柔性机器人机构的 结构更依赖于与之对应的刚性体机构的拓扑结构, 而分布式全柔性机器人机构的拓扑结构显然要复杂 些, 但这并不影响后者的应用裕度. 事实上, 商品化 的分布式全柔性超精密定位平台已先于前者在市场 上找到了自己的位置. 究其原因, 主要是以单自由度 或两自由度为主要特征的分布式全柔性机器人机构 不仅制造工艺简单、加工精度容易保证, 而且控制简
单, 对于自由度数要求并不很高、运动行程又不是很 大的精密定位场合确实有着较大的优势. 但这并不 意味着整体式全柔性机器人机构应用前景黯淡. 正 好相反, 随着精细作业的日益复杂性, 对执行机构的 自由度、工作空间、刚度等多方面的性能提出了更高 的要求, 分布式全柔性机器人机构将受到极大的限 制; 另一方面, 随着加工工艺等领域的不断进步, 整 体式全柔性机器人机构的应用前景将越来越光明.
3
并联机构与全柔性机器人机构
(Para llel m echan ism an d FCRM )3. 1 并联机构的优点
全柔性机器人机构与并联机构有着密切的联 系. 从机构学的角度, 并联机构的一些特点在一定程 度上正好加强和弥补了全柔性机构的优点与不足, 两者的有机结合正好满足一些应用领域中特有的运 动分辨率高 (nm 级)、响应快 (几十到几百 H z)、尺寸 小等要求. 这些优点具体体现在:
① 精度高: 从运动学的角度看, 尽管全柔性机器 人机构中由于采用柔性铰链避免了运动副的间隙误 差, 但柔性铰链自身也会造成变形误差. 并联结构各 运动链的布置可以限制这种误差的累积放大, 使其 更适合作为高精度机器人的执行机构.
② 刚度大: 较高的刚度才能保证机构具有较高 的定位精度和良好的抗干扰性能. 柔性铰链在一定 程度上会降低机构整体的刚度, 而采用并联式的结 构设计可弥补由此造成的“缺憾”. 因为并联机构的 运动平台通过多个运动链与机架联接, 增加了整体 结构刚度.
③ 结构紧凑: 并联式结构可设计得更为紧凑, 所 占空间更小. 实际上, 这与对全柔性机构作为机器人 执行机构的要求相吻合, 因为小的机构本体尺寸意 味着受到很小的惯性力及表面力影响.
④ 便于对称性的结构设计: 因为对称性的结构 设计便于补偿加工或温度变化等因素引起的误差, 从而在整体上改进机构的精度. 另外, 对称性的结构 也意味着加工简单, 易于模块化.
⑤ 驱动装置固定: 采用并联结构很容易将驱动 装置放于机座上, 减轻了运动构件的质量, 从而减少 了运动负载和系统惯性, 改善了机构的动态性能, 可 获得较高的动力学精度. 这尤其适合高精度的场合.
另外驱动器与末端执行器相隔较远, 客观上起到了 净化工作环境的作用, 而这对微操作及微装配中的 某些具体应用是十分必要的.
⑥ 存在消极铰链: 并联结构中消极铰链的存在 可使机构变得结构紧凑、整体小型化; 更重要的是可 改善机构的受力情况, 避免杆件的纵向弯曲.
总之, 并联式结构所具有的精度高、刚度大、结 构紧凑、对称性好、速度高、自重负荷比小、动力学性 能好等优点使其更适合作为全柔性机器人机构的
“型”. 实际上, 这正是目前绝大多数整体式全柔性机 器人机构采用并联式结构的理由所在.
另外, 作为并联机构主要缺点之一—— 工作空 间小, 对全柔性机器人机构而言不再是缺点. 因为目 前众多的精密作用领域对于工作空间的要求并不很 高, 一般并联机构的工作空间都可满足要求, 而真正 限制全柔性机构工作空间大小的因素是驱动器的性 能和柔性铰链的性能.
3. 2 现有并联式结构分类
按照驱动方式可将并联机构分为四种类型: 旋 转 驱动型 (简称 RA 型) , Stew art 平台型 (简称 SP 型)、固定导向驱动型 (简称 FL 型) 和混合驱动型 (简 称M A 型) , 其中混合驱动型是指某些非对称性的并 联机构, 如其中有些分支采用旋转驱动, 而一些分支 采用固定导向驱动的机构. 由于该类型机构并非目 前应用的主流, 故表 2 只对前三类机构的性能进行 了比较.
表2 几种类型的并联机构性能比较
Table 2 Character istics of typ ica l para llel m echan ism s
RA型 SP型 FL型
驱动器位置 机架 支链 机架
速度 快 较快 较快
输出力 小 大 大
结构 简单紧凑 支链占体积较大 机架占体积较大
加工难度 易 难 难
刚 度 差 好 好
运动分辨率 低 较高 高
工作空间 较大 小 大
典型结构 32RRR 32R PS、62U PS 62PSS
对相关文献进行统计, 现有公开的并联机构 (包 括串并联机构) 有百余种, 其中三、六自由度的各占 40% , 两自由度的占 10. 5% , 四自由度的占 6% , 五自 由度的占 3. 5%. 作者在翻阅众多文献 (包括学术期 刊、论文、网站以及国内外专利等) 的基础上, 对其中 所涉及的 3~ 6 自由度并联机构进行了分类总结, 以 作为整体式全柔性机器人机构选型的初始“素材”[ 2 ].
所列的并联机构图库基本涵盖了“前人”们的劳动成 果, 对选择具有更佳性能的并联式全柔性机器人机 构理应有所帮助. 应该指出的是, 著名学者 J. P.
M e rle t[ 3 ]在这方面作了很多有益的工作, 内容上还有 待丰富和完善; 此外, 国内的部分学者如黄真、高峰 等也在新型并联机构的研制上作出了宝贵的贡献.
3. 3 并联机构的型综合
在全柔性机器人机构族中, 并联式所占的比重 越来越大. 而目前并联式全柔性机器人机构的“型”
基本都是从其所对应的刚性体机构衍生而来. 上节 对已有的并联式机构进行了归类总结, 对设计者在 选择他们所希望的全柔性机器人机构型式大有裨 益. 尽管如此, 现有的机构仍不足以满足实际设计的 需要, 而且很多机型并不适合作为精密作业用的全 柔性机器人机构. 因此, 开发新型的并联全柔性机器 人机构还是很有必要的.
机构创新中, 其中一个重要思路就在于结构布 局型式上的创新. 但机构创新的根本并不在于此, 机 型的创新才是机构创新的根本. 这就是机构型综合 所要研究的内容: 即通过构建新型的分支铰链分布 组成新型的并联机构, 以期具有独特的性能.
鉴于并联机构拓扑结构较为复杂, 其型综合的 研究方法就变得越来越重要. 目前对并联机构型综 合问题的研究中, 所采用的方法有李群法[ 4 ]、单开链 ( SO C ) 单元法[ 5 ]、旋量法[ 6 ]等, 上述方法从本质上是 一致的. 李群法简洁但十分抽象; 相对而言, 在对空 间少自由度并联机构进行型综合时, 利用旋量法会 更加直观. 该内容不是本文研究的重点, 因此也不再 对此赘述.
4
柔性铰链的几何模型
(Geom etr ica l m od- e ls of f lexure h in ge s)如果将前面所述的结构比作骨架的话, 柔性铰 链就相当于肌肉, 二者结合才能决定全柔性机器人 机构的“型”. 在全柔性机器人机构中, 柔性铰链尤为 重要. 具体而言, 柔性铰链的形式主要有转动副、球 副、移动副、虎克铰及平面副等.
4. 1 柔性转动副
柔性转动副是指通过特殊的材料并按照特定的 几何方式构建, 使与之相联接的两构件间发生相对 转动的一种结构形式. 功能上, 以仿效传统形式的转 动副. 柔性转动副是一种最常用也最基本的柔性铰 链, 因为通过它可以组合成柔性移动副、虎克铰、平 面副甚至球副等.
现有的柔性转动副有多种型式. 根据变形机理 划分, 可分为弯曲变形式和扭转变形式. 常规的柔性 铰链型式多采用悬臂梁型式见图 1 (a) , 利用的是弯 曲变形原理, 但缺点是变形比较小、运动范围有限.
为克服这一缺点, 基于扭转变形的板簧式柔性转动 副和裂筒式柔性转动副见图 1 (b) 相继提出, 但由于 其结构相对复杂, 体积较大, 应用十分受限制. 从目 前来看, 常规柔性转动副仍然是柔性结构设计中的 首选. 从结构是否对称角度, 柔性转动副可分为单轴 与双轴两种形式. 由于双轴柔性转动副的变形与相 同结构参数的单轴柔性转动副要大, 因此双轴柔性 转动副应用更广一些. 而按铰链切口轮廓划分柔性 转动副又可包括以下几种: 圆弧型、直角型、圆角型 以及椭圆型等如图 1 (c).
(a) 双轴圆弧式 (b) 裂桶式 (c) 四种不同切口轮廓 图1 不同类型的柔性转动副
F ig. 1 D ifferen t k ind s o f flexu re reso lu te h inges
4. 2 柔性移动副
与柔性转动副类似, 柔性移动副也是一种特殊 的结构形式. 功能上能仿效常规形式的移动副. 同 样, 可采用不同的结构类型来满足柔性移动副所要 求的功能. 其中最为常用的是如图 2a 所示的平行四 杆型.
(a) 平行四杆型 (b) 八杆联动型
(c) 平行板型 (d) 平行弹簧片型 图2 柔性移动副
F ig. 2 D ifferen t k ind s o f flexu re p rism a t ic h inges
该柔性移动副包含有四个柔性转动副, 具有良
好的运动性能与导向精度, 可实现平动. 平行四杆型 结构相对简单, 易保证加工的精度, 这些都是该类型 柔性移动副得以应用较广的根本原因. 但是, 它会在 其运动方向的垂直方向上产生一纵向耦合位移, 引 起定位误差. 为此文献[ 2 ]给出了两种可消除该定位 误差的新型柔性移动副结构. 一种是双平行四杆型 柔性移动副结构, 另一种是八杆联动型柔性移动副 图 2 (b). 此外, 为增大柔性移动副的运动范围, 可采 用平行板式图 2 (c) 或平行弹簧片式图 2 (d) 的柔性铰 链结构.
4. 3 柔性球副
柔性球副的结构与柔性转动副很类似, 只是切 口截面轮廓不同. 柔性球副的切口截面为圆形, 理想 柔性球副的切口为两个圆锥相对组合而成, 三轴转 动中心为圆锥顶点. 实际上受加工条件及其他条件 的限制, 不能将铰链的细颈处加工得很细, 这样必然 导致误差的存在. 为减小误差可用另外一种结构来 代替, 即在图 4 所示的结构上面加上一个与该结构 中两个轴线正交的柔性转动副, 同样可实现与球副 等效的功能. 由于柔性球副在机构中多充当消极运 动副的角色, 在全柔性机器人机构中多采用图 3 所 示的结构.
图3 柔性球副 F ig. 3 F lexu re sp herica l h inge
4. 4 柔性虎克铰
柔性铰链还有一类较为常用, 就是柔性虎克铰, 可实现两个正交轴线方向的转动. 实际应用中常用 的是如图 4 中给出的具有更为紧凑、精度更高的结 构型式.
图4 柔性虎克铰 F ig. 4 F lexu re un iversa l h inge
5
结构构型
(Structura l conf igura tion s) 以上对并联机构结构模型与柔性铰链几何模型 进行了系统性总结. 在此基础上, 来讨论全柔性机器 人机构“型”的构筑问题.构型时, 一种最为简单的方法便是替换法: 将原 有并联机构中的运动副分别用相对应的柔性铰链所 替代. 目前大多数全柔性机器人机构在设计时都采 用的是这种方法. 但在实际设计中, 并非如此简单.
一方面, 设计者要遵循一定的原则, 以保证设计成 功; 而另一方面, 也给设计者留下了很多想象的空间 和“自由度”. 因为即使同一种拓扑结构的并联机构 通过设计者的再加工也会由于结构的不同使机构在 性能上产生较大的差异.
5. 1 结构布局的选择与构建
结构布局是影响全柔性机器人机构性能的重要 因素. 即使具有同一拓扑结构的并联机构也会因其 结构布局的不同使机构在性能上存在较大差异. 这 种结构布局的不同可具体体现在: 铰链分布方式、单 个分支内铰链与构件间分布方式以及各分支间位姿 关系等.
(1) 铰链分布方式
铰链分布方式主要是指铰链与平台间的位置关 系, 最为常见的两种结构分布是铰链轴线方向沿切 向和沿法向: 即星型和三角型结构如图 5 所示.
图5 铰链的分布方式 F ig. 5 H inge d ist ribu t io n
(2) 单个分支内铰链与构件间分布方式
单个分支内铰链与构件间分布方式是指两者之 间的位置关系, 如 32R PS 平台机构中二者的分布方 式就与 32R PS 角台机构[ 7 ]有很大差别. 图 6 给出了 D e lta 机构的角台型结构图. 该机构结构紧凑, 具有
很高的运动分辨率.
下面结合一具体的例子 (平面 32RRR 全柔性机 器人机构) 来说明该因素对机构性能的影响: 平面 32 RRR 机构是并联机构中较为简单但应用十分广泛的 一种机型, 结构紧凑, 运动学与动力学都相对简单, 可实现 X、Y 两个方向的移动和绕 Z 轴的相对转动
(X、Y、ΗZ). 尽管如此, 如果采用不同结构布局的结构 设计, 即使具有相同分支 (R2R 2R ) , 机构的性能也会 有较明显的差异. 图 7 中给出了三种虽均以平面并 联 32RRR 机构为模板, 但结构布局上却有较大差异 的全柔性机器人机构. 其中图 7 (a) 是德国 J. H essel2 bach 等[ 8 ]设计的微装配机器人; 图 7 (b) 是北航机器 人研究所设计的面向生物工程的微操作机器人平 台; 而图 7 (c) 是韩国 J. W. R yu 等[ 9 ]设计的精密定位 平台. 在结构布局上, 图 7 (a) 更接近于所对应的刚性 体结构, 图 7 (b) 采用的是紧凑型精巧设计, 而图 7 (c) 采用了常规分布式精密定位平台的设计方式, 可经 过更加精密的加工方式 (如刻蚀) 制造而成, 以实现 更高的精度.
图6 D elta角台型机构
F ig. 6 A p y ram id2typ e m echan ism
(a) (b)
(c)
图7 具有不同布局的三种平面32RRR全柔性机构 F ig. 7 T h ree k ind s o f p lana r 32RRR FCRM
为了能有更深的认识, 表 3 对其中后两种平台 的工作空间及精度进行了比较. 结果表明: 采用不同 结构布局的结构设计确实会造成机构性能上的显著 差异; 同时也说明了采用以并联结构为代表的整体 式全柔性机器人机构设计实现大空间和高精度是完 全可行的.
(3) 分支间的位姿关系
并联式结构由多个分支组成, 即使采用对称性 的结构设计, 有些机型也可因分支间的位姿关系不
同而衍生出若干种机型来, 如 Stew art 平台机构就有 626 型、623 型、624 型、323 型等, 从而造成各机型间 性能的差异. 但将 Stew art 平台设计成全柔性机构的 型式却比 62PSS 型机构难得多. 其主要原因就在于 62PSS 机构的驱动器可放置在基座上, 而且由于属于 FL 驱动型, 具有工作空间大、运动分辨率高、结构紧 凑、具有良好的动态特性等优点, 为设计者所偏爱.
这里就以 62PSS 机构为例来说明分支间位姿关系的 差异对机构性能的影响.
表3 3-RRR全柔性机器人性能测试结果与比较
Table 3 Com par ison s of the two 3-RRR com pl ian t stages
性能指标 整体式 分布式
X 方向的运动范围(Λm ) 77. 28 41. 5 X 方向的运动分辨率(nm ) 13. 2
Y方向的运动范围(Λm ) 71. 02 47. 8 Y方向的运动分辨率(nm ) 3. 4
Z方向的转角范围(m rad) 2. 16 1. 565 Z方向的运动分辨率(Λrad) 0. 6
在设计该型式的全柔性机器人机构时, 结构布 局有诸多方案可供参考. 其中最常见的一种结构类 型是像清华大学和哈尔滨工业大学等研制的耦合式 全柔性微定位平台. 见图 8. 不过, 如果改变各个分支 的结构布局, 采用 22222 (各分支在空间三维正交方 向上两两分布) 或者 32221 (分支在空间三维正交方 向上分别为三个、两个和一个) 正交分布型式, 这样 便可消除运动学的强耦合, 改善机构的力学性能
等[ 10 ]. 尽管这种解耦是瞬时的 (一般在设计的初始位
姿处) , 但机构微动特点的本身决定了机构的受力性 能得到很大程度的改善. 而对全柔性机器人机构而 言, 机构的受力情况 (包括外力与内力) 会对机构的 性能尤其对其运动学产生巨大的影响.
图8 解耦型全柔性机器人 F ig. 8 A deco up led FCRM
5. 2 柔性铰链的选择
在前面已经介绍了典型的柔性铰链结构, 并且 给出了每种结构的优缺点, 尤其对于柔性转动副和
移动副都对应着多种结构型式, 这些都对全柔性机 器人机构的“型”的构造很有帮助. 但在构型中, 需要 注意到以下几点:
( 1) 柔性球铰加工难度较大, 成本较高, 很难保 证精度. 尽管机构中的柔性球铰一般作为消极铰链, 但在误差较大的情况下会严重影响机构的性能. 因 此选用球铰要谨慎. 对于 SPS 型和 PSS 型的机构, 可 优先考虑用柔性虎克铰来代替柔性球铰.
( 2) 典型的柔性移动副主要有平行四杆型和平 行板型两种. 通常情况下以前者作为消极铰链, 而以 后者作为驱动副更容易使结构紧凑并保证高精度.
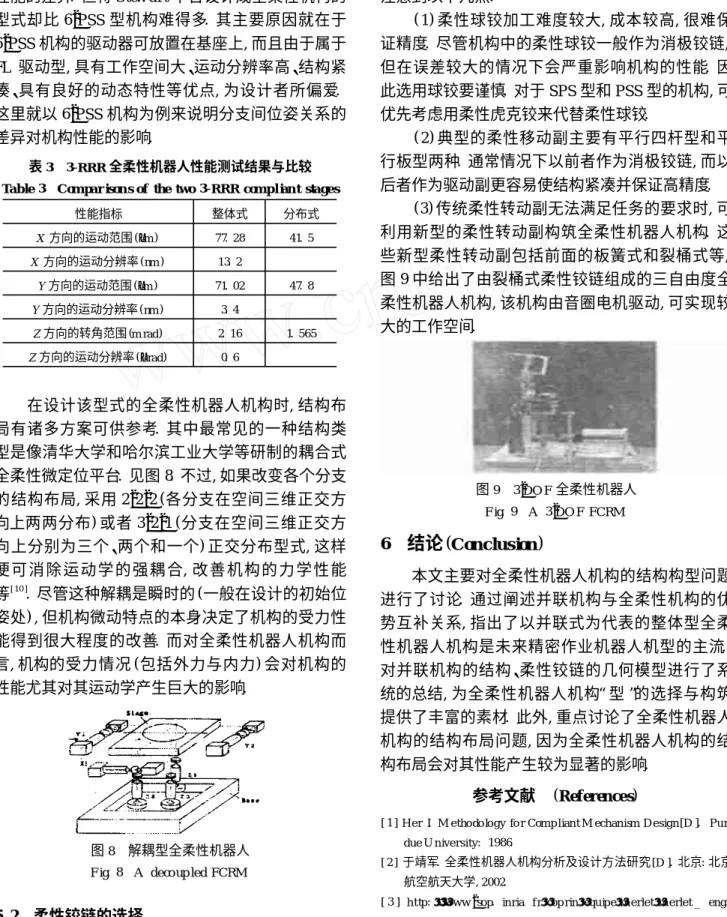
(3) 传统柔性转动副无法满足任务的要求时, 可 利用新型的柔性转动副构筑全柔性机器人机构. 这 些新型柔性转动副包括前面的板簧式和裂桶式等, 图 9 中给出了由裂桶式柔性铰链组成的三自由度全 柔性机器人机构, 该机构由音圈电机驱动, 可实现较 大的工作空间.
图9 32DO F全柔性机器人 F ig. 9 A 32DO F FCRM
6
结论
(Conclus ion )本文主要对全柔性机器人机构的结构构型问题 进行了讨论. 通过阐述并联机构与全柔性机构的优 势互补关系, 指出了以并联式为代表的整体型全柔 性机器人机构是未来精密作业机器人机型的主流.
对并联机构的结构、柔性铰链的几何模型进行了系 统的总结, 为全柔性机器人机构“型”的选择与构筑 提供了丰富的素材. 此外, 重点讨论了全柔性机器人 机构的结构布局问题, 因为全柔性机器人机构的结 构布局会对其性能产生较为显著的影响.
参考文献 (References)
[ 1 ] H er I. M ethodo logy fo r Com p lian t M echan ism D esign [D ]. Pu r2 due U n iversity: 1986.
[ 2 ]于靖军.全柔性机器人机构分析及设计方法研究[D ]. 北京:北京
航空航天大学, 2002.
[ 3 ] h ttp:ggwww2sop. in ria. frgcop ringequ ip egm erletgm erlet _ eng.
h tm l.
(下转第377页)
赛的主力军.
目前, 两足机器人已经分别在 RoboCup 98 和 F IRA 2002 上亮相, 但它们只能进行诸如行走、避障 等表演, 还不能进行足球比赛. 图 2 为两足机器人在 F IRA 2002 上进行避障表演, 两足机器人研究的最 大难题在于如何保持躯体平衡以及如何将行走机构 做得小巧、灵活、协调、易控. 由于腿是由许多关节构 成的, 这无疑对机构学、运动学、动力学以及多变量 非线性控制带来极大的困难. 显然, 这是今后机器人 足球比赛的重点发展方向, 也是当前机器人学科的 前沿课题.
图2 两足机器人避障表演
F ig12 Exh ib it io n o f tw o2leg ro bo t avo id ing o b stacles
6
结论
(Conclus ion )机器人足球比赛提出了具有吸引力但很难实现 的挑战, 给机器人学和人工智能研究提供了机遇. 它 还给出了一些挑战性的项目, 来评价特殊的技术问 题. 随着技术的不断进步, 这些挑战项目将会被新的 挑战所代替. 机器人足球比赛提供了一个促进人工
智能和机器人学发展的综合的研究项目. 笔者相信, 如果机器人能够向人类一样踢足球, 那么机器人就 可以在危险、恶劣甚至人类无法到达的场合代替人 类工作, 这无疑将对人类社会产生巨大而深远的影 响. 因此, 机器人足球比赛应该受到足够的重视.
参考文献 (References)
[ 1 ] M ackw o rth A. O n seeing robo ts. in: Com p u ter V ision: Sys2 tem s, theo ry, and app lica t ion s[J ]. W o rld Scien t ific, Singapo re, 1993. 1- 13.
[ 2 ] Jong- Hw an K im. T h ird Call fo r Particip ation [A ]. M icro2robo t W o rld Cup Soccer Tou rnam en t 1996 (M iroSo t’96) [C ]. A cces2
sib le from h t tp:ggviva ld i. ka ist. ac. k r.
[ 3 ] H iroak i K itano, M ino ru A sada, Yasuo Kun iyo sh i, Itsuk i N oda, E iich i O saw a. RoboCup: T he Robo t W o rld Cup In it ia t ive [A ].
In IJCA I- 95 W o rk shop on En ter- ta inm en t and A IgA life [C ].
M on t rea l, Q uebec, A ugu st 1995.
[ 4 ] Kennedy J F. U rgen t national need s, Sp eech to a jo in t session of cong ress [M ]. Cong ressiona l R eco rd2Hou se ( 25 M ay 1961 ) , 1961.
[ 5 ] M ino ru A sada, H iroak i K itano. T he RoboCup Challenge [A ].
Robo t ics and A u tonom ou s System 1999[C ]. 3- 12.
[ 6 ] M ino ru A sada, H iroak i K itanoet a l. RoboCup: Today and to2 m o rrow2w ha t w e lea rned [A ]. A rt ificia l In telligence [C ]. 1999.
193- 214.
作者简介:
洪炳熔 (19372) ,男,教授, 博士生导师,研究领域为空间
机器人、虚拟现实、机器人足球.
韩学东 (19732) ,男,博士生. 研究领域:多智能体系统、智
能控制、机器人足球.
孟 伟 (19742) ,女,博士生. 研究领域:多智能体系统、系
统建模.
(上接第372页)
[ 4 ] H ervéJ M. G roup m a them a t ics and p a ra llel link m echan ism s[A ].
P roceed ing s of IM A CSgS ICE In terna t iona l Sym po sium on Robo t ics[C ]. M echa t ron ics and M anufactu ring System s, Kobe, J ap an: 1992, 459- 464.
[ 5 ]金琼,杨廷力等.基于单开链单元的欠秩并联机器人机构型综合
的一般方法[J ]. 机械科学与技术, 2001, 20 (3) : 321- 325.
[ 6 ] H ara A , Sug im o to K. Syn thesis of p a ra llel m icrom an ip u la to rs [ J ]. Jou rnal of M echan ism s T ran sm ission s, and A u tom ation in D esign, 1989, 111: 34- 39.
[ 7 ]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M ].北京:
机械工业出版社. 1997.
[ 8 ] H esselbach J , P litea N , T hoben R. A dvanced techno log ies fo r m icro a ssem b ly [A ]. P roceed ing s of SP IE In terna t iona l Sym po2
sium on In telligen t System s & A dvanced M anufactu ring [ C ], P it t sbu rgh, U SA : 1998, 178- 190.
[ 9 ] R yu J W , L ee S Q , Gw eon D G, M oon K S. Inverse k inem a t ic m odeling of a coup led flexu re h inge m echan ism [ J ]. Jou rna l of M echa t ron ics, 1999, (9) : 657- 674.
[ 10 ]金振林.新型六自由度正交并联机器人设计理论与应用技术研
究[D ].秦皇岛:燕山大学, 2001
作者简介:
于靖军 (19742) ,男,博士后. 研究领域:机器人机构学.
宗光华 (19432) ,男,博士生导师,主要研究领域为机构学、
机器人控制以及自动化工程.
毕树生 (19672) ,男,副教授. 研究领域:微操作机器人.