I
國 立 交 通 大 學
土木工程學系
碩士論文
LED 光源影像應用於水位量測之研究
Application Study of LED Light
Source Image on Water Level Measurement
研 究 生:陳家榮
指導教授:葉克家 博士
II
LED 光源影像應用於水位量測之研究
Application Study of LED Light
Source Image on Water Level Measurement
研 究 生:陳家榮 Student:Chan-Jung Chen 指導教授:葉克家 Advisor:Keh-Chia Yeh
國立交通大學
土木工程學系
碩士論文
A ThesisSubmitted to Institute of Civil Engineering College of Engineering
National Chiao Tung University In Partial Fulfillment of the Requirements
For the Degree of Master In
Civil Engineering December 2012
Hsinchu, Taiwan, Republic of China
中華民國一○一年十二月
I LED 光源影像之水位量測研究 研究生:陳家榮 指導教授:葉克家 國立交通大學土木工程研究所
摘要
本研究目的為在易淹水地區之水位計開發,克服一般市售水位計 造價昂貴,且無法廣設於易淹水地區之問題,其優點為硬體設備造價 低廉、內部元件取得容易、儀器架設方便、量測精確度高、且未來發 展性強。 本研究設計之試驗儀器,為三角光學式測距水位計。影像擷取鏡 頭使用市售價格低廉之網路攝影機,計算部分利用三角測距量測法 (Optical Triangulation Method) 結合光學形心法(Centroid Method),追 蹤計算 EPS 浮板上之光源形心位置及變化量,反推其水位。 試驗部分為靜態及動態水位試驗,靜態水位試驗使用靜穩之蓄水 槽,放入三角光學式測距水位計並於相同水位進行二組不同解析度, 計算與實際水位誤差量比較;動態水位試驗則固定試驗水槽中之流量, 調整尾水板,以不同之水槽水位進行誤差測試。最後,與市售二種壓 力式及一種浮筒式水位計檢校報告實測值進行相對誤差分析比較。 試驗結果顯示三角光學式測距水位計之靜水位誤差範圍,符合美國國 家環境保護局所提出量測精度須小於±0.01ft 之規範。 關鍵字:易淹水地區水位計、光學三角測距量測法、光學形心法II
Application Study of LED Light
Source Image on Water Level Measurement
Student:Chan-Jung Chen Advisor:Keh-Chia Yeh Institute of Civil Engineering
National Chiao Tung University
Abstract
This study aims at the development of water level gauge for flood-prone areas. To overcome common level gauges, expensive cost and not being able to applied to flood-prone areas, this research focuses on five directions: low cost of hardware of the instrument, the availability of internal components, the convenience to set up the instrument, high accuracy of measurement, and the potential of development in the future.
Optical triangulation water level gauge is designed in this study. Webcam with low price is used to capture the image in this study. The combination of optical triangulation method and centroid method is applied in the calculation. By tracing the position and the variation of the centroid of light source on the EPS kickboard, water level can be deduced.
Experiments of water level are divided into static and dynamic parts. In the experiment of static water level, optical triangulation water level gauge was put in the static sink and measured with two different resolutions; measurements for the two resolutions were compared with the actual water level, and the both error were calculated and compared, too. As for dynamic experiment, flux of water was fixed, and the inaccuracy was measured by putting the optical triangulation water level gauge into sinks with different water levels. The measurements were compared with two submersible pressure sensors and another float sensor. Measurement of the triangulation water level gauge reveals that error range of the static water level is smaller than 0.01ft, which is the standard of precision of measurement set by United States Environmental Protection Agency.
Keywords:water level gauge for flood-prone areas, optical triangulation method, centroid method
III
誌謝
承蒙恩師葉教授克家於就學期間悉心指導與諄諄教誨,使本論文 得以順利完成。研究所兩年半以來,恩師對於做事方法與態度、分析 問題、獨力解決問題能力之培養、邏輯思考的訓練等,熱心指導讓學 生受益良多。並於日常生活中,受到恩師與師母的關心與照顧,謹此 獻上最誠摯的感謝。 文稿初成,感謝國立台灣海洋大學翁教授維珠、國立交通大學楊 博士昇學以文細心斧正與建議,使本論文更臻完善;此外,感謝系上 老師於課業上的教導與啟發,亦感念交大土木系的資源設施,使學生 受益無窮。 特別感謝國立台灣海洋大學趙教授勝裕及翁教授維珠對學生不 吝指導及適時提出研究方向與協助。研究所期間非常感謝楊博士昇學 長,在待人處事、實驗研究諸多關懷與教誨。感謝紹唐學長於實驗過 程以及論文方面的協助。感謝仲達學長、仁凱學長、柏傑學長、彥瑜 學姐、唯泰學長、東洲學長在學業及研究上的照顧。感謝相處兩年多 的研究夥伴阿富、豪哥、岱玲姊、阿直、舒舒、綺綺、翔哥,有了你 們,我的研究生活才會如此的精采豐富,這段友誼將會永遠長存。感 謝學弟邱哥、阿威的幫忙與參與,沒有你們的協助,我的研究將不會 如此順利。感謝研究所好友楊帆提供公式推導及協助。感謝如來實證 社的師兄姐們,在我最困頓難過時扶持我。感謝交大管弦樂社的夥伴 們,讓我研究所的生活不再枯燥乏味。 最後,衷心感謝的是含辛茹苦、撫育我成長的爸媽、老姊、阿公, 由於你們的扶持與栽培,使我得以在無後顧之憂的情況下努力衝刺我 的學業。謹將此份榮耀與喜悅獻給關心我的家人、師長、同學及所有 朋友,謝謝你們。 陳家榮 謹銘於國立交通大學輸砂實驗室民國 101 年 12 月 25 日聖誕夜IV
目錄
第一章 緒論 ... 1 1.1 研究動機 ... 1 1.2 研究目的 ... 1 1.3 文獻回顧 ... 2 1.3.1 水位計研究 ... 2 1.3.2 光學影像量測研究 ... 8 1.3.3 光學形心法 ... 14 1.4 研究方法 ... 17 1.5 論文架構 ... 17 第二章 試驗儀器設計與實驗步驟 ... 19 2.1 試驗儀器硬體配置 ... 19 2.2 試驗儀器程式概述 ... 20 2.2.1 影像擷取程式 ... 20 2.2.2 影像過濾處理 ... 21 2.3 誤差處理及分析 ... 22 2.3.1 計算結果之誤差值處理分析 ... 22 2.3.2 光學影像計算誤差 ... 28 2.4 三角測距量測法水位計算 ... 30 2.5 三角光學式測距水位計試驗設計 ... 31 2.5.1 靜止水位試驗配置 ... 32 2.5.2 水槽動態流況之水位計試驗配置... 32 第三章 試驗結果與討論 ... 35 3.1 靜止水位試驗結果 ... 35 3.2 水槽動態流況試驗結果... 36 3.3 二組試驗綜合討論 ... 37V 3.4 試驗與市售儀器誤差比較 ... 38 第四章 結論與建議 ... 39 4.1 結論 ... 39 4.2 建議 ... 40 參考文獻 ... 42
VI
表目錄
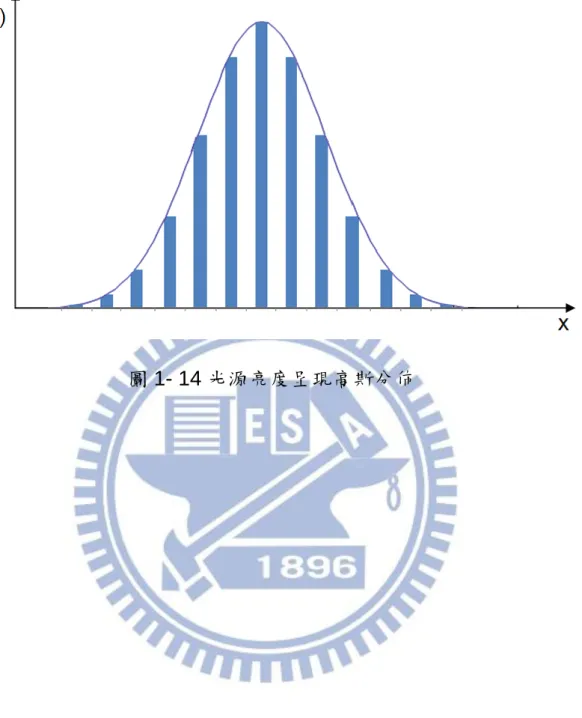
表 1- 1 常見的水位計種類及說明(蔡宗旻 2004) ... 46 表 2- 1 Logitech C310 網路攝影機規格 ... 48 表 2- 2 三角光學式測距水位計售價表 ... 48 表 2- 3 光源實際與計算位置比較表 ... 49 表 2- 4 解析度 640X480 像距 I 計算表 ... 50 表 2- 5 解析度 1280X960 像距 I 計算表 ... 51 表 3- 1 靜水位試驗 640x480 一覽表 ... 52 表 3- 2 靜水位試驗 1280x960 一覽表 ... 53 表 3- 3 靜水位試驗 640x480,U1 誤差表 ... 54 表 3- 4 靜水位試驗 1280x960,U1 誤差表 ... 55 表 3- 5 動態水位試驗 640x480 一覽表 ... 56 表 3- 6 動態水位試驗 1280x960 一覽表 ... 57 表 3- 7 水位計規格說明(經濟部水利署 2005) ... 58 表 3- 8 試驗儀器與市售水位計之誤差比較(經濟部水利署 2005) ... 59VII 圖目錄 圖 1- 1 觸針式水位測深尺 ... 60 圖 1- 2 電極觸針自記式水位計 ... 60 圖 1- 3 電子浮筒式水位計 ... 60 圖 1- 4 機械式浮筒水電子浮筒式水位計 ... 60 圖 1- 5 壓力式水位計(探頭) ... 61 圖 1- 6 超音波式水位計(探頭) ... 61 圖 1- 7 雷射式水位計 ... 61 圖 1- 8 雷達式水位計(探頭) ... 61
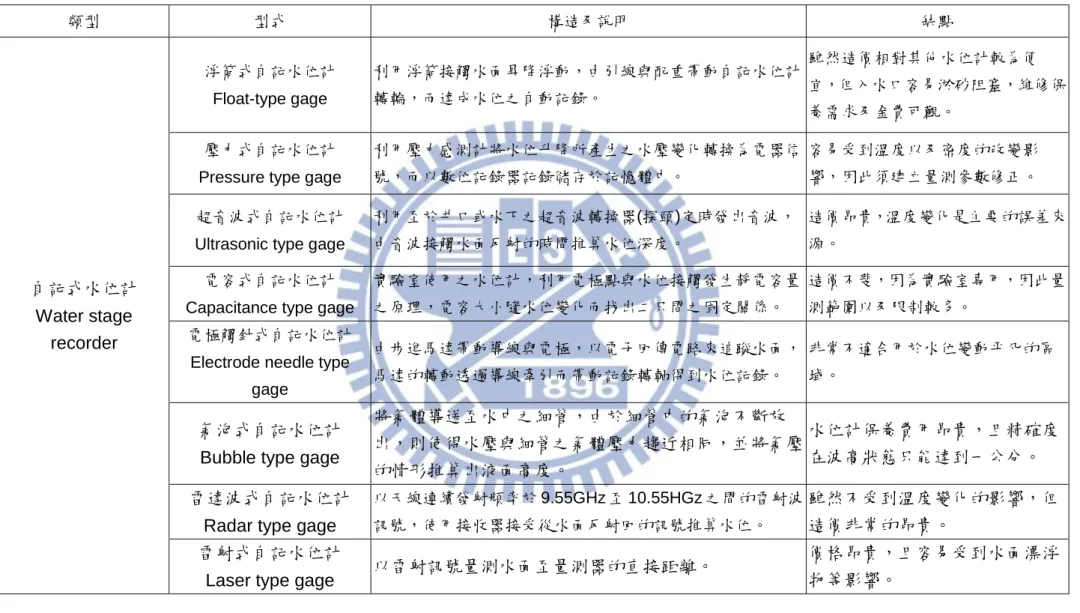
圖 1- 9 聚焦成像原理 (Pereira and Gharib, 2002) ... 62
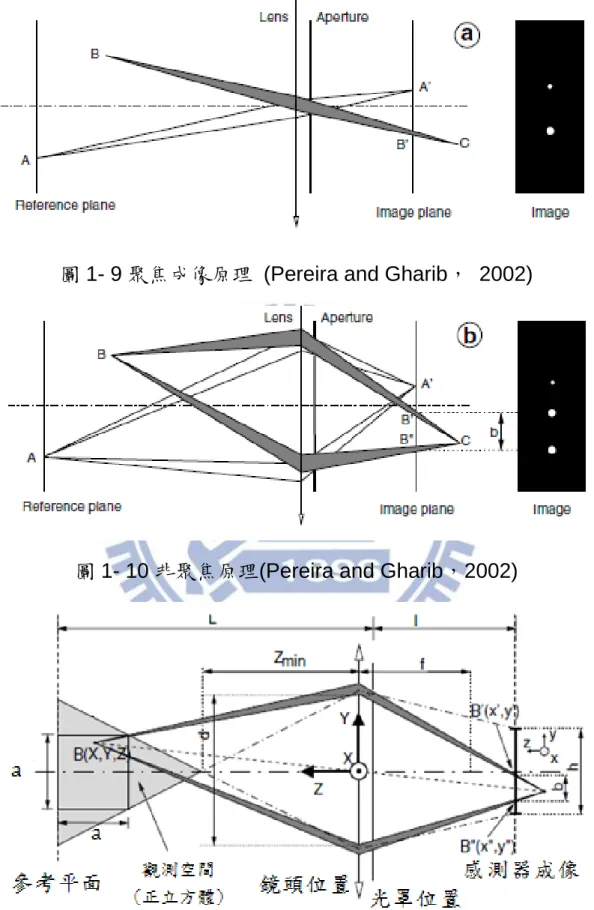
圖 1- 10 非聚焦原理(Pereira and Gharib,2002) ... 62
圖 1- 11 非距焦參數示意圖(修改及參考 Pereira and Gharib,2002) .. 62
圖 1- 12 等腰三角形光罩非聚焦系統(Pereira et al.,2000) ... 63 圖 1- 13 三角測距示意圖 ... 63 圖 1- 14 光源亮度呈現高斯分佈 ... 64 圖 2- 1 系統運作簡介 ... 65 圖 2- 2 試驗儀器配置圖 ... 65 圖 2- 3 影像擷取程式介面圖 ... 66 圖 2- 4 原始成像(壁面反光等干擾) ... 66 圖 2- 5 亮度值轉換原始圖 ... 67 圖 2- 6 亮度值轉換濾光門檻處理後圖 ... 67 圖 2- 7 亮度值轉換原始圖(立體表示) ... 68 圖 2- 8 亮度值轉換濾光門檻處理後圖(立體表示) ... 68 圖 2- 9 已知像點距離之計算結果 ... 69 圖 2- 10 水深為 0cm 解析度 1280X960 之擷取影像 ... 70
VIII 圖 2- 11 水深為 45.5cm 解析度 1280X960 之擷取影像 ... 70 圖 2- 12 實驗流程圖 ... 71 圖 2- 13 可傾式水槽及相關配置圖 ... 72 圖 2- 14 靜水位試驗架設圖 ... 73 圖 2- 15 蜂巢結構整流裝置 ... 73 圖 2- 16 可傾式水槽流量率定曲線 ... 74 圖 2- 17 可傾式水槽尾水板 ... 74 圖 2- 18 水槽試驗架設圖 ... 75 圖 3- 1 靜水位解析度 640X480 試驗圖 ... 76 圖 3- 2 靜水位解析度 1280X960 試驗圖 ... 77 圖 3- 3 動態靜水位解析度 640X480 試驗圖 ... 78 圖 3- 4 動態靜水位解析度 640X480 試驗圖 ... 79
1 第一章 緒論 1.1 研究動機 近年來氣候變遷為許多專家學者、政府研究單位關注及探討之議 題,而台灣發生極端暴雨及颱洪之機率亦明顯上升;大量暴雨伴隨颱 洪,使得易淹水地區有淹水之虞,對經濟財產等造成甚大威脅及損失。 若有效掌握水位並即時取得水位資料,回報相關防救災單位,可爭取 更多時間,進行災中應變作業。 河川與區域排水之水位為研究流域特性,不可或缺之基本資料, 亦為地區防災、水資源規劃、水理或淹水模式檢定驗證之重要數據。 一般市售水位觀測儀器大多非適用於易淹水區域,且多半有造價或維 護費用昂貴、易受外在環境干擾等缺點。因此,本研動機在研發一套 硬體設備造價低廉、儀器架設方便、量測精確度高、可用於易淹水區 域之即時水位監測技術,亦可結合通訊系統,可即時回傳影像達到預 警功能。 1.2 研究目的 本研究採用國立海洋大學趙勝裕教授之建議,考量目前即時水位 測站,多為固定點之監測,無法廣設於易淹水地區,為克服此問題, 本研究利用 LED 光源、網路攝影機進行研發,使用雷射光學測距法
2
中之三角測距量測法(Optical Triangulation Method)計算,研發出適用 於易淹水地區之水位計。 1.3 文獻回顧 1.3.1 水位計研究 水位量測技術最早之文獻記載為古埃及,當時即有人專職記錄尼 羅河水位變化,推算氾濫時間及範圍。水位量測技術發展初期,係在 欲量測區域設置水尺,經人為判讀後記錄,但易受測量時之時間、天 氣等因素影響。隨著時代進步,電子系統蓬勃發展,人為判讀方法逐 漸被各式自記式水位計取代。
美國地質調查局(United States Geological Survey,USGS)委託加 州大學進行農業及河川所用之水位計與記錄器試驗評析報告(1998), 分析市售 20 種不同廠牌型式之水位計,進行長時間特性、氣溫影響、 水溫影響、泡沫影響、時間延遲、波浪影響、訊號線性與回差、乾涸 效應、輸出穩定性、記錄精確度之試驗評分。整理出 17 組水位計之 評比積分表,最後依試驗結果建議使用超音波式、浮筒式及壓力式水 位計為佳,並說明上述三種水位計之適用特點、設置經費及使用注意 事項。經濟部水利署「地下水位觀測系統儀器建置標準之建立(2005)」 之報告,利用第五及第七河川局二種壓力式及一種浮筒式水位計,進 行已知水位及量測水位誤差分析比較,作為檢校儀器之標準。
3 一般物理量測,依據是否直接接觸量測體,可分為侵入式及非侵 入式水位計二大類,說明如下: 1. 侵入式水位計 (1)觸針式水位測深尺 觸針式水位測深尺外觀如圖 1-1 所示,為簡易攜帶之移動水尺, 其探測原理為使用測深尺下降接觸水面時,測深尺前方探測針頭因接 觸液面而產生通路,使儀器開始運作而得知當下之水位值,但此儀器 為非自記式水位計須人為主動進行記錄。因此,可得知量測當下之瞬 時水位。儀器使用探測針頭觸水導電原理,若現地空氣濕度或雨勢較 強等情況下,探測針頭可能在尚未接觸水面時因濕氣或雨水,使探測 針頭導電產生通路影響水位判斷。該儀器售價約 1 萬元左右。 (2)電極觸針自記式水位計 Grant (1978)利用電極觸針針頭接觸液面產生通路,及驅使馬達 自動牽引記錄儀,達到自動記錄之目的,此為首例電極觸針自記式水 位計,外觀如圖 1-2 所示。電極觸針自記式水位計多半用於水井水位 之判讀,因電極觸針針頭之特性,可用於較小管徑之水位測量。但有 馬達牽引自動記錄器紀錄延遲之問題,因此,不建議使用於短時間水 位變動過大之區域。
4 (3)浮筒式自記水式位計 浮筒式水位計發展已有百年以上之歷史,早期係使用機械原理將 接觸水面升降之浮筒結合引線與配重砝碼,帶動轉輪進行水位紀錄, 外觀如圖 1-3 所示。近年來電子浮筒式水位計,係利用儀器內部電位 差之設計原理,因此,當水位變化而產生電位差,水位計內部之檢測 器,將自動調整電阻進行電位比較,由此電阻之變化,即可測得當下 之水位。外觀如圖 1-4 所示。Stannard and Rosenberry (1991)發現在越 深之地下水觀測井,使用電子浮筒式水位計量測,有量測誤差較大之 問題,原因來自於浮筒與井壁間之摩擦阻力,尤其在水位劇烈變化期 間,摩擦阻力會使得浮筒電位計產生遲滯,而無法反應瞬間之水位變 化。此外,在小口徑的地下水位觀測井,摩擦阻力增加更影響電子浮 筒式水位計之靈敏度。為因應國內水利單位之需求,蔡宗旻(2004)將 侵入式浮筒水位計汰換為非侵入式超音波水位計,而做出一系列之比 較。認為浮筒式水位計量測,其觀測井容易淤積,導致水位計設備維 護不易。總結上述,可知浮筒式水位計有易受壁面摩擦阻力與觀測井 容易淤積,造成儀器維護不易之缺點。依照可量測之深度範圍不同, 售價約為 1.5 萬至 3 萬元左右。 (4)壓力式水位計 大氣壓力具有等向性且會隨著水深增加而線性遞增,由實驗及公
5 式推導可知,水深約莫增加 70 公分即有 1 磅力每平方英寸(PSI)之壓 力變化。因此,將水位升降所產生之壓力變化,轉換為電子訊號 (Electric Signal),儲存於記憶體中。 壓力式水位計開發初期,因壓力感測元件及電子訊號轉換技術不 佳等因素,儀器誤差量甚大。Sweet et al. (1990) 認為當時研發之壓力 式水位計,準確度及精確度,受隨機誤差及系統不確定性影響,無法 達 到 美 國 國 家 環 境 保 護 局 (United States Environmental Protection Agency,EPA)所提出量測精度須小於±0.01ft(約±0.3cm)之規範,並指 出水位變化較小之區域,若使用大尺度壓力感測計量測,其精確度不 佳,建議水位計壓力感測尺度應因地制宜,因此,後續研發出 2PSI 及 50PSI 等不同之壓力感測尺度之壓力式水位計。 Stannard and Rosenberry (1991)將自製深度為 180 公分之直立式 PVC 水管,裝水後 分別放入壓力式與電子浮筒式水位計,並讓直立式 PVC 水管於自然 狀態下慢慢蒸發,以代表井管內水位變化,進行二者誤差比較,發現 五種壓力式水位計量測結果,精確度均劣於電子浮筒式水位計。 目前因感測元件之改進、電子訊號轉換效能提升與電腦系統之進 步,壓力式水位計量測精度大幅提升而被廣泛使用。但感測元件易受 水溫以及密度影響量測精度,因此,存在須建立量測參數進行定期檢 校修正之限制,其外觀如圖 1-5 所示。售價約 2 萬至 5 萬元左右。
6 2. 非侵入式水位計 (1) 超音波式水位計 超音波式水位計可分為水底式發射及空氣發射式二種型式,將超 音波轉換器置於水底或空氣中,發射一錐狀超音波訊號接觸液體交界 面後進行原路徑反射訊號接收進行水位之換算,其外觀如圖 1-6 所示。 其優於超音波之指向性大發射能量小,能有效掌握探測方向,及超音 波波長較短,可將超音波轉換器製成小型輕巧型式。但超音波係使用 介質傳遞對於溫度及濕度變化過於敏感,且超音波轉換器為錐狀型式 發散,因此,儀器下方需淨空較大之觀測區域,故不建議於小範圍或 障礙物較多之地區。蔡宗旻(2004)指出超音波水位計對溫度過於敏感, 導致量測結果誤差甚大,因而使用測棒檢定(Bar Check)程序,發展一 改良式超音波水位計量測法,但指出在自動化監測上,對於資料異常 處理仍須人為判讀修正,其售價約為 3 萬至 6 萬元左右。 (2) 雷達波式水位計 雷達波最早為第二次世界大戰期間英國和德國交戰,英國急需一 種能探測空中金屬物體之方法,因而研發出一種特殊型式之電磁波。 電磁波可穿越空間中之微小粉塵及蒸氣等干擾源,且有遇到障礙物易 反射之特性,因此被廣泛用於物體測距計算。現今雷達波測距,其依 頻區段主要可分為:24GHz 微波雷達及 76 至 77GHz 之毫米波雷達。
7 微波雷達多適用於短距離,而毫米波雷達則適用於長距離之偵測。 雷達波式水位計,係使用雷達波發射器發射連續之雷達波訊號, 並藉由天線接收反射回響訊號來計算水位,其外觀如圖 1-7 所示。 Fukami et al. (2008)多次利用 24GHz 連續雷達波發射器,架設於都市 型河川之橋樑上,長時間觀測洪水漲退之流量變化過程。Discant et al. (2007)比較雷射、雷達波、聲納等感測方法,認為雷達波儀器不易受 到天氣干擾,並能提供極為精確之距離及速度估算,但對於目標物外 型辨識度較低。經濟部水利署因「因應氣候變遷河川流量觀測技術研 發及建置(2010)」報告中,介紹四種雷達波式水位計,其雷達波感測 器不含現場固定器材、太陽能板、儀器箱、施工工資等費用,已需 15 至 30 萬元。綜合上述可知,雷達波式水位計有不易受外在環境濕 度、溫度、粉塵等,影響準確性之優點,但儀器價格昂貴且構造精密, 若雷達波發射器發生故障,其修復不易。 (3) 雷射式水位計 一般雷射式水位計,量測原理與一般超音波水位計量測相似,係 由雷射光發射器射出一脈衝波後,擊中水面後反射波依原路徑回到接 收器,依據發射脈衝波與收到反射波時間間隔,計算水面至雷射式水 位計之距離反推其水位深度,其外觀如圖 1-8 所示。雖雷射式水位計 不受溫度及計算延時之影響,但其設備在不含現場太陽能板、儀器箱、
8
施工工資,即需 15 萬元以上,且雷射光傳輸需要良好之反射面,並 易受到水面漂流物影響,因此普及率較差。
1.3.2 光學影像量測研究
1. 質點影像測速法
質點影像測速法(Particle Image Velocimetry,PIV)為一種非侵入 式影像分析處理技術,因量測方式不會侵入干擾流場,因此多用於量 測流場之流速剖面、雷諾剪應力、迴流區、流體經過結構物造成之特 殊物理性質,亦對於真實流場中之流況,有極佳觀察特性。在質點影 像測速法應用於防災監測部分,林千翔(2011)使用便宜之市售網路攝 影機結合質點影像測速法(Particle Image Velocimetry,PIV),監測模 擬自然災害下 LED 燈源之瞬時位移,並藉由觀測此位移變化即可進 行即時災害預警與警報發佈,而提出災害偵測預警系統(Disaster Detection Alarming System,DDAS)。其系統中,儀器具有設備成本 低、硬體設備取得容易、架設容易、偵測準確度高,及具有預警功能 等優點。質點影像測速法僅適用於二維災害位移監測,對本研究之三 維位移判斷適用性低。為克服計算三維座標之變化,提出非聚焦數位 質點影像法及全畫素質點影像測速法,以下進行其文獻回顧。 (1) 非聚焦數位質點影像測速法 Rosenfeld (1976) 認為一個由數位攝影機所拍攝下之數位影像,
9 係為一組二維灰度值(Gray Values)或一組一維類似時間序列之訊號。 使用雷射光作為光源,拍攝在欲量測區域內,短時間重複曝光二張照 片,由 CCD 相機圖像擷取卡將檔案傳輸至電腦,在這二張照片內質 點極為相似之情況下,將二張圖片間各畫素進行相關性分析,獲得位 移、速度等物理量,此種方法稱為數位質點影像測速法(Digital Particle Image Velocimetry , DPIV) 。 而 非 聚 焦 數 位 質 點 影 像 測 速 技 術 (Defocusing Digital Particle Image Velocimetry,DDPIV)方面,Pereira and Gharib (2002)認為若參考平面(不管光罩如何變化依然成像相同 之位置)上光點 A 在一個小之光罩孔徑內,及目標平面外光點 B,如 圖 1-9 所示;則 A 點集中投影在 A',而 B 點則投影出放大且模糊之 B'。當使用二個或二個以上之光罩時 B 點將會散射成遠離光軸之 B' 及 B" 二個發散亮點,如圖 1-10 所示而 DDPIV 原理係使用 B' 及 B" 之距離 b 判斷欲量測物體 B 之三維座標位置,但若光源 B 位於參考 平面外,不同位置距離二點,將可能散射於同一點成像上,形成影像 重疊,為了解決這個二個不同位置卻有同一個成像點之問題,使用等 腰三角形光罩將其分開,如圖 1-12 所示。最後根據上述這些物理特 性推導光點 B 在坐標軸上之位置方程式如下及圖 1-11 所示。 (1-2) (1-1)
10 (1-3) (1-4) 其中: 及 為光點 B 散射之光點座標; M 為幾何光學放大倍率;
(1-5) b 為改變光罩所造成分離向量;由質點影像分析可得,相關公式為:
(1-6) K 為 M 及 L 乘積倒數;以常數表示: K (1-7) Zmin為感測器最小物距; f:鏡頭焦距; d:光罩至中心光軸之距離; L:參考平面至光罩所在平面之距離; a:特徵體積長度。 Pereira et al. (2000)聚焦數位質點顯像測速法,量測三維二相氣泡 流流場,量測氣泡大小位置及氣泡破裂產生之特殊軌跡線;而誤差範 圍僅在 0.025 pixels,因此,可以有效描繪出整個流場之流速以及氣泡 (1-8)
11
位移程度。Kajitani et al. (2005)認為 Pereira and Gharib 所推導出方程 式是由二維觀念延伸至三維,有些不恰當之假設,因此使用不同光軸 上之目標點位置,重新以正三角形體積,修正原本提出之正立方體觀 測空間方法。Dejiao et al. (2008)發現若是前後二組試驗之光軸方向位 移甚小時,會發生前後二質點影像重合,降低判斷質點移動能力;如 使用同心圓環狀特殊光罩,改變非聚焦質點形狀,而可以有效處理光 軸方向質點 0.023mm~10mm 微小位移造成質點影像重合之情況。 (2) 全畫素質點影像測速法 一般攝影器材所擷取出之圖片,多為平面影像,並無現實環境中 之立體感,不易透過影像取得空間中所有訊息。而在雷射光被發明之 後,人類才突破這項限制取得了第一張全畫素 (Holographic)照片; 而全畫素質點影像測速法(Holographic Particle Image Velocimetry, HPIV)是使用二個以上之雷射脈衝光,記錄瞬間全畫素流場質點,或 三維流場圖像;三維圖像可以重新顯示現實空間中,三維流場粒子形 狀大小及位移情形 。因此,僅須使用連續二張短時間、重複曝光之 照片便能夠獲得三維流場粒子向量位移,及三維觀測區域內之速度場 變化。Okamoto et al. (2003)使用高速攝影機,結合全畫素質點影像測 速法,量測噴流衝擊平板之三維速度場,發現深度方向之速度變化量 測不佳。因此,Takahiro et al. (2006)利用時空導數法(STDM)修正全畫
12
素質點影像測速法(HPIV),量測三維立方體穴流情形,改善深度方向 量測不佳之缺點,可將其均方根誤差(RSM)降低至 0.025mm 以下。 2. 雷射光學測距法
雷射光學測距法最早係為美國國家航空暨太空總署(National Aeronautics and Space Administration,NASA)於 1980 年代為了航太 安全而率先使用,直至 1990 年代初期,雷射光學測距法被用於一般 之距離量測計算。雷射測距一般可細分為:飛行時間量測(Time of Flight,TOF)、三角測距量測(Triangulation Method)等二種方法。雷射 光源集中不易發散及不易受目標物接觸面角度散射影響,量測精密度 高。由不同角度所發射之雷射光,即可取得目標物外型資料,且對目 標物辨識較雷達波優良。Nitzan et al. (1977)即使用雷射光學測距法, 量測物體三維形變及推算其張力變化,並討論飛行時間量測及三角測 距量測之適用性比較。 (1) 飛行時間量測法 飛行時間量測法,係為一般雷射測距儀及雷射式水位計所使用之 量測方法,係由雷射光發射器射出一脈衝波後,擊中待測物體後反射 波依原路徑回到接收器,依據發射脈衝波與收到反射波時間間隔,可 推算出物體距離雷射光發射器之距離。由於雷射光以光速行式傳遞, 因此在溫度變化劇烈環境下,不需考慮都普勒效應影響所導致紀錄延
13
時遲滯情形,唯一僅需考慮天氣不佳因素造成折射使其量測偏差。目 前國內外多應用於機械及電機方面,進行機器人或自動車輛測距導航 之研究。
(2) 三角測距量測法
1970 年代三角測距量測法(Optical Triangulation Method)在結合 電腦運算後,因觀察範圍廣闊、高準確度、檔案易存取、計算即時性 強等優點而逐漸被使用。其原理為使用雷射光或直線條紋投射於待測 物表面,藉由待測物表面起伏及曲度變化,追蹤雷射光光源像點在空 間上之移動,再經由光學系統圖像取得前後之相對關係,推導出待測 物表面不同位置之角位移量,並以三角幾何關係,計算出光源像點之 三維座標,進而推算出整個空間情形。如圖 1-13 所示: (1-9) (1-10) 上二式中, Z:初始觀測點光源位置與感測器之距離; B:LED 光源至光軸之距離為定值; U1:光源成像與光軸間之距離; I:光學系統之成像距離為定值; Y:欲量測之水位;
14 :水位抬升後,觀測點光源位置與感測器之距離; U1':水位抬升後,光源成像與光軸間之距離。 當光源位置位移至 時,其成像會移動至 U1',因此,只要量測光源 成像與光軸間之距離,即可推論出觀測點之深度變化。 陳郁鴻(2005)使用 CMOS sensor 配合雷射光及三角測距量測法, 觀測感測器上之雷射光形心位移,計算家蠶肌肉組織因注射刺激性化 學藥劑,造成疼痛之肌肉振動與脈搏變化。吳軒孝(2007)使用相同三 角測距量測法,將雷射點光源透過圓柱透鏡,形成雷射光頁投射於待 測物體表面,重複測試至消除誤差後,即可獲得該測試體特定縱斷面、 形狀及位置,最後利用此技術感測人體脈搏之微小血管收縮振動情 形。 1.3.3 光學形心法 影像擷取計算過程中,所萃取計算之光點並非以單一個畫素值 (Pixels)配合座標表式,圖像均由眾多畫素值所組成之 ASCII 格式光 源矩陣方式儲存,為了計算及應用,必須以光源點內某一座標位置, 代替整體光源系統進行運算。
光學形心法之概念最早由 Morgan et al. (1989)所提出,Alexander and Ng (1991)將光學系統之光源亮度值整合計算,以形心即代表整體
15 光源之概念,推導出完整之光學形心法公式(Centroid Method),並探 討光學形心法與整體系統計算誤差情形。 由 Alexander and Ng (1991)之試驗結果及相關文獻回顧可知,進 行多次試驗中,由感測器測得之畫素亮度值近似高斯分佈(Gaussian Distribution),故假設 f(x)為其真實亮度值分佈,為連續對稱之偶函數, 如圖 1-14 所示,在考慮計算一維 X 軸方向中心位置時可以使用形心 之方法求得正確之位置Xf,其公式如下: 假設 表示該試驗中,光點區域中最大畫素亮度值,可視為一個已 知常數,而ζ表示光點區域最大畫素亮度值鄰近之干擾變動量且 ζ ,若令 ζ代入(1-11)式中整理後其分子為: (1-12) 而由 f(x)定義可得知其為一對稱之偶函數,因此,分子最後一項為 0 而分母為: 將上二式合併處理後可證明Xf 同理Y 軸方向也使用上述方法推導後,將(1-11)式合併使用加總之方 ζ ζ __ (1-11) (1-13) __ ζ ζ ζ ζ ζ __
16 式表示: (1-14) 上式中 即為所求之形心位置, 及 分別為 X 方向及 Y 方向 之位置座標,f(Xi)及 g(Yj)為 X 軸及 Y 軸方向,該位置座標之光點畫 素亮度值,假設 LED 光源亮度值為穩定之情況下,追蹤計算觀測面 移動上方之光點位移,其畫素亮度值波形也隨之移動。並由鄰近區域 之畫素亮度值修正其最大亮度值之形心座標,有效提升精確度至小於 一個畫素值內,且解析之答案是有意義的。 總結上述文獻回顧,水位計之綜合說明如表 1-1 所示,可得以下 水位計文獻回顧結論:(1)新型水位計研發,必須為自記式水位計、(2) 必須克服水位資訊轉換與紀錄延時遲滯之問題、(3)浮筒式水位計需 建置靜水井,壓力式水位計多半放置於渠道底面,超音波式水位計下 方必須淨空錐狀型區域等、(4)須克服水溫、密度等因素影響量測結 果、(5)非侵入式水位計,多有造價昂貴之缺點。 光學影像量測研究文獻回顧結論:非聚焦數位質點影像測速法可 有效之計算微小三維座標變化,但為達到其量測目的,需訂製可變焦 鏡頭與特殊形式之光罩。而全畫素質點影像測速法及飛行時間量測法, 前者需特殊之影像擷取器材,後者則需雷射光測距儀,二者之試驗儀
17 器均價格昂貴。因此,以降低成本為考量,選用集中之 LED 燈光光 源 代 替 金額 昂貴之 雷 射 光發 射器; 使 用 市售 便宜之 網 路 攝影 機 (Webcam)接收光學影像,代替傳統影像擷取器材;並利用三角測距量 測法結合光學形心法計算水位。 1.4 研究方法 本研究使用市售便宜之網路攝影機(Webcam)使用光學形心法 (Centroid Method),計算光源之形心座標與光軸間之距離變化後,帶 入三角測距量測法(1-9)式,計算出實際光源形心點與觀測之網路攝影 機鏡頭距離,進而推算出水位變化情形。並利用國立交通大學土木工 程系河川輸砂試驗室可傾式水槽及循環水槽,進行蓄水槽靜態及可傾 式水槽動態流況試驗,以釐清誤差來源並供未來研究之參考。 1.5 論文架構 本論文共分四章節,分別為緒論、試驗佈置與實驗步驟、試驗結 果與討論、及結論與建議,茲簡述章節內容如下: 第一章為緒論:說明本文研究目的及動機,並將水位計、光學測距計 算、光學形心法之計算方式等進行文獻回顧。最後使用三角測距量測 法,與光學形心法作為程式計算主要核心。 第二章為試驗儀器設計與實驗步驟:將說明試驗儀器之軟硬體設計、
18 介紹實驗水槽設備、設計試驗及介紹試驗限制條件。 第三章為試驗結果與討論:分析其試驗與實際量測誤差、水流靜穩與 擾動造成之影響、並與經濟部水利署檢校報告中二種壓力式及一種浮 筒式水位計進行比較。 第四章為結論與建議:歸納本研究之結果,並建議後續研究方向。
19
第二章
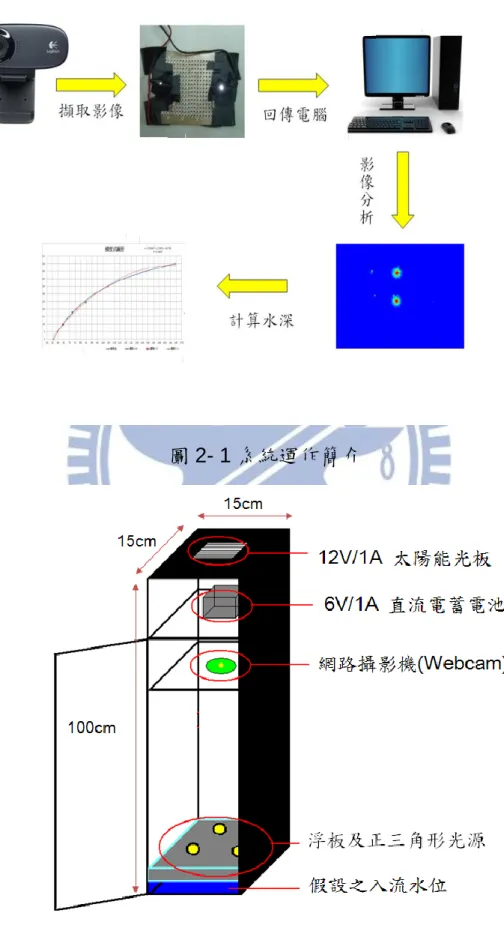
試驗儀器設計與實驗步驟 本研究設計係使用網路攝影機(Webcam)連結電腦,拍攝擷取浮板 上因水位高度改變而產生之不同 LED 光源形心位置,計算不同水位 之光源形心位置與光軸間之距離變化,並使用電腦內之程式計算得到 相對應之水深,水位計實驗系統架構如圖 2-1 所示。 2.1 試驗儀器硬體配置 目前儀器以純黑色壓克力板製成,底面積為 15cm×15cm正方形, 高 1m 之立方體箱子。為避免黑色壓克力板因內壁反光影響,係以一 層純黑色平光水泥漆處理,硬體配置由上至下分別為: 1. 儀器頂部為 12V/1A 太陽能光板。 2. 第一隔層為 6V/1A 之充電電池。於充電電池飽滿情況下,可連續 供給三個月以上之 LED 光源使用。 3. 第二隔層為 Logitech C310 網路攝影機(Webcam),其規格如表 2-1 所示。 4. 底部為發泡聚苯乙烯(EPS)材質浮板以及乘載三枚正三角形佈置 之白色 LED 光源。儀器整體製作經費以黑色壓克力外殼為主占整 體 67%,詳細製作費用如表 2-2 所示。而儀器整體配置如圖 2-2 所示。20
2.2 試驗儀器程式概述
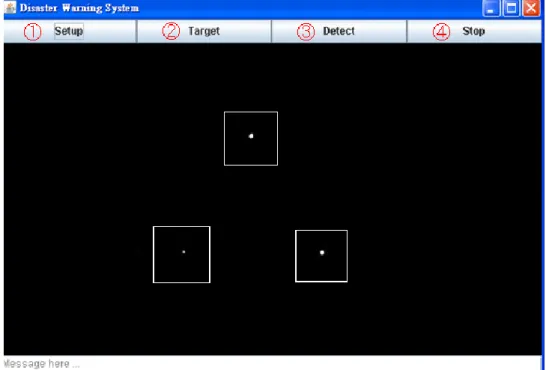
本研究程式系統開發上,分為基本資料擷取及水位判讀二部分。 基本資料擷取程式由國立台灣海洋大學翁維珠教授(2010)所研發,採 用 JAVA 語法之 Swing 套件撰寫,因為了方便操作而使用圖形化使用 者介面(Graphical User Interface,GUI)。本研究主要使用此程式進行 影像擷取及原始影像轉換為 ASCII 形式,以利後續研究計算。 水位判讀部分為自行開發,使用 Fortran 語法撰寫分別為:ASCII 檔案之濾光門檻及雜訊處理、光源影像之形心座標計算、三角測距量 測法之水位判斷,及檔案輸出整理與可視化作圖。 2.2.1 影像擷取程式 本研究系統影像擷取程式開發上,包括基本資料影像擷取及畫素 亮度值轉換程式。程式開發係以 JAVA 語法寫成,依其語法之特性, 未來容易與手機元件模組結合,利用手機模組圖像擷取便捷,高傳輸 速率且成本低廉,結合有線或無線網路,達到自動擷取影像、分析運 算、資料回傳及發出淹水警訊等功能。 影像擷取程式操作介面詳見圖 2-3,其功能如下: 1. Setup 按鈕功能為設定 (1)設定濾光門檻。
21 (2)若有裝設 GSM MODEM 則可設定在位移超過幾個影像畫素(Pixel) 時發佈警訊之簡訊通知。 (3)設定接收警訊簡訊之手機門號。 2. Target 按鈕功能為最多選取三個 80×80 Pixels 影像質問窗,觀測 質點位移狀態。 3. Detect 功能為記錄網路攝影機所拍攝之畫面,後續若畫面中產生 質點或光影變化時,會立刻將變化後之畫面亮度值以 ASCII 及圖 片格式儲存,做為質點位移之依據。 4. Stop 功能為停止程式運行包含影像位移監測以及擷取圖像功 能。 2.2.2 影像過濾處理 本研究計算使用三角測距量測法,結合光學形心法概念,量測浮 板上 LED 燈源因為水位上升而造成光源間距離變化,計算其水位。 實驗中將拍照之影像儲存於電腦記憶體當中,再依照影像中各畫素間 亮度不等之情況轉換為 ASCII 檔案;若以 8bit 來記錄影像上各個位 置之畫素亮度值,則亮度值會轉換為 0 至 255 間畫素亮度之數值。 程式執行擷取圖片時,常有因箱子閉合不全、LED 光源照射內部 線材反光、壁面因濕潤造成之壁面反光折射等,使擷取圖片中產生雜 訊,而造成程式自動判讀之困難。在系統運作中,需要有效掌握到
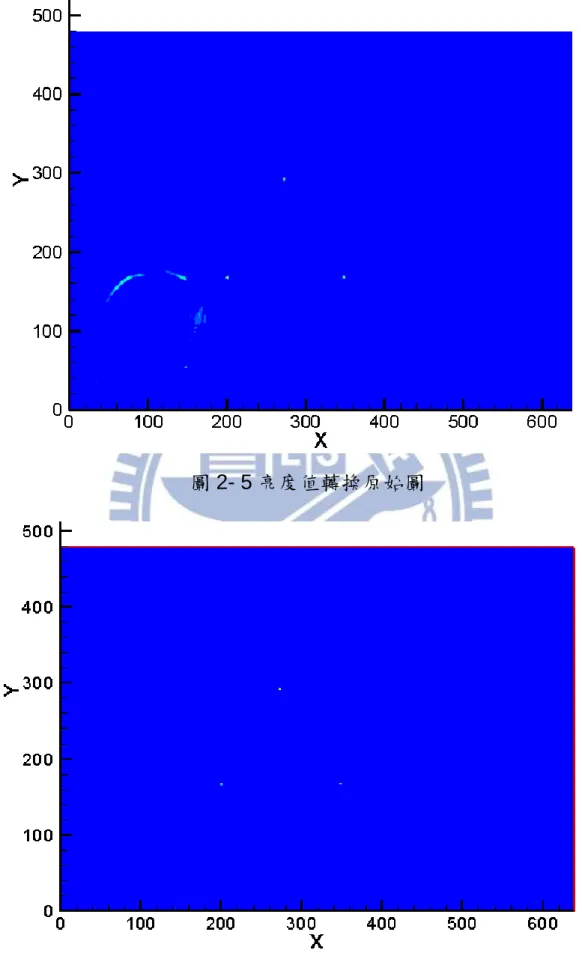
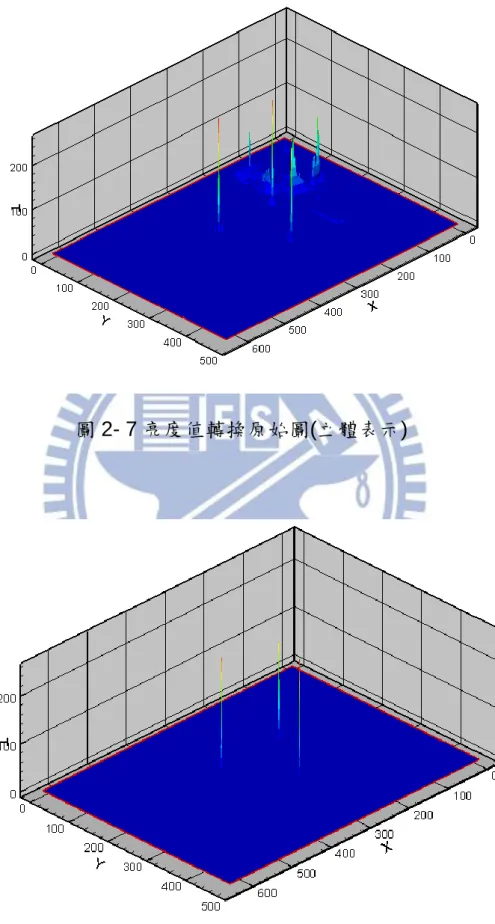
22 LED 光源形心之真實位置,避免因人為操作不當、環境干擾等因素, 影響追蹤質點及計算之準確性。因此,本程式為自行開發以 Fortran 語法撰寫,目的為過濾除了發光像點 LED 燈外其他干擾光源,並將 背景雜訊做去除工作。假定設計之濾光門檻為 220,則低於 220 畫素 亮度質點,將會全部予以去除。如濾光門檻過高,則會破壞欲量測之 LED 光源而影響判斷;反之,若濾光門檻過低,則會造成背景及干擾 光源清理不全之窘境。經重複調整濾光門檻後,採 200 畫素亮度值為 濾光門檻。圖 2-4 為鏡頭直接擷取測試實驗之圖像;圖 2-5 係將圖像 轉換為 ASCII 檔案後所繪製之可視化圖像;圖 2-6 為使用 200 畫素亮 度值濾光門檻,去除雜訊後之圖像。後續係以濾光門檻處理後之資料, 作為計算之原始基本資料。 2.3 誤差處理及分析 2.3.1 計算結果之誤差值處理分析 計算結果之誤差值處理分析,參考黃福坤(2008)誤差傳遞概念, 將誤差量之算數平均數與平均值標準差(Standard Error of the Mean, SEM)進行合併分析,茲敘述其理論及公式推導如下。
1. 精密度(Precision)
23 2. 準確度(Accuracy) 量測值與真值(實際數據或廠商提供之資料)之偏差值。 3. 母體分配 每次量測時均存在一個「真值」,若無試驗設計不良之系統誤差 下增加相同之試驗次數,其隨機誤差之正負機率近似相等,因此所有 量測之平均值將隨著測量次數增加,而結果越接近實際物理量之真值 消除其隨機誤差。當其量測次數近乎於「無限次數」時,其量測值之 數值分配即稱為「母體分配」。 若進行「有限次數」試驗量測則屬於母體分配之部份樣本,即「樣 本分佈」。如同母體分配之定義,樣本分佈之所有量測平均值,即為 有限次數試驗最佳之真值估計方法。 4. 算數平均 5. 偏差值 定義為每一個數據與所有量測平均值之差量稱之。 , ─ (2-1) ─ (2-2)
24 ─ ─ 2 ─ ─ ─ ─ 上式之偏差值有正負之分,但所有之偏差值總和為零。 6. 變異數 為了量化試驗數據之精密度並解決偏差值總和為零之情形,將偏 差值平方後並取平均定義出變異數。 7. 標準差(Standard Deviation,RMS) 以母體分配而言(n→∞),取變異數之平方根以用於定義母體分 配之標準差,代表實驗數據之分配精密度。 其中, 稱為方均根。 在進行有限次數試驗下,若以(2-4)式處理試驗數據,按照其式分 母為 n 可推論出只需進行 n=1,僅一次試驗就可得到精密度最高偏差 ─ (2-3) (2-4)
25 ─ ─ ─ ─ ─ ─ ─ 量為零之最佳試驗數據。此情況與現實狀態不符且與母體分配之定義 相互矛盾,因此特將(2-4)式之分母修正為 n-1,則可避免單一試驗即 為最佳精密度之問題,且若在多次試驗情況下分母 n 與 n-1 之結果相 去不遠,因此定義有限次數試驗之標準差。
8. 誤差傳遞(Propagation of Error) 許多物理量是藉由量測多個不同種類之物理量,經由其關係式計 算而得。如:速度多以物體位移量除以測量時間、動量為速度與物體 之質量乘積;由上述可知,若物體位移量及量測時間之偏差將會影響 速度量測,而速度計算誤差將會影響後續動量計算結果,此情況稱為 誤差傳遞。 假設某一物理量 X 與 u,v,…有關,其中某一組樣本量測數據 使用 表示,其量測之平均量使用 表式, 則誤差量計算為下所示。 將上式進行泰勒展開處理後, (2-5) ─ ─ ─ ─ ─ ─ ─
26 而將上(2-6)式帶回變異數(2-3)式中,
如果 u 及 v 為試驗時,不互相影響之獨立物理量則方程式可簡化為,
9. 平均值標準差(Standard Error of the Mean,SEM)
在不考慮本身儀器缺陷所造成之系統誤差下,於不同時間下進行 重複多組相同物理量之量測試驗,其測得之試驗平均值並非完全相同, 而各組間試驗平均值也會呈現一高斯分佈之情形。故在多次進行試驗 ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ (2-6) (2-8) (2-7) ─ ─ ─ ─ ─ ─ ─ ─
27 情況下,並不會有效增加其量測精密度,但如果將其重複試驗所計算 出之平均值標準差進行分析,即可顯示出所得平均之可重複程度,即 為結果精密度。 因此使用誤差傳遞之公式進行平均值標準差分析, 其中各試驗之平均值為獨立量測而得,為不相關之獨立變數因此 假設各組量測之標準差均相同時則, 則 2-10 式可化簡為: 故可推導出平均值之標準差為; 因此多次試驗結果即為,算數平均數(2-1)式與平均值標準差(2-11)式 之修正關係, 後續實驗結果使用(2-12)式,進行 SEM 分析其絕對誤差量求得 X Xi = Xi 1 n Xi n i=1 = 1 n ─ ─ ─ ─ ─ ─ ─ (2-9) (2-10) (2-11) (2-12) ─ ─
28
實驗儀器之平均誤差區間,探討實驗儀器是否符合美國國家環境保護 局所提出之量測精度規範。
2.3.2 光學影像計算誤差
光學影像計算程式上誤差可分為三大類型:質問窗內質點脫離或 配對錯誤、隨機誤差(Random Error)及系統誤差(Systematic Error)三 種。 1. 質問窗內質點脫離或配對錯誤 兩張影像在質問窗比對計算時,可能因流場流速過快、流場向量 梯度過大、三維流場變化等,導致欲觀測之質點離開質問窗造成無法 計算。此型態之誤差可經由不一致性資料處理,去除錯誤之位移量。 2. 隨機誤差 隨機誤差又稱為精密度誤差(Precision Error),為試驗量測中隨機 性因素等所造成,可能為觀測質點之比重(本研究為亮度值)、分佈密 度、背景雜訊等造成。一般而言,可藉由多次試驗後,計算其標準差 (Standard Deviation)或 RMS 誤差,並由標準差之分散程度決定誤差之 大小。 X 為質問窗平均位移量以(2-1)式表示: ─ ─
29 ─ 其中,Xi為質問窗位移量。 RMS 誤差 以(2-3)式表示: 其中,RMS 誤差為質問窗平均位移量與質問窗位移量之平方總和。 3. 系統誤差 系統誤差多來自一些已知之因素,例如:外在環境包括溫度、 濕度、影像擷取、訊號轉換、人為操縱不當及設計原理本身之缺陷等 導致。此誤差不包含隨機之因素,有其特殊之一致偏差性,因此可由 修正之方法減低誤差。其發生之主要原因為質問窗所計算之像點與實 際位置無法完全吻合,計算公式如下: 其中,上式中 di為偏移誤差,可由實際位移值 da與質問窗內計算之 平均值 X 計算而得。
本試驗參考 Liang and Jiang (2002)之理論,設計了設計 9 組二個 實際像點位置相距為已知,高斯分佈之同心圓光源 A、B。將設計之 光源經影像過濾處理後進行程式計算,計算之結果如表 2-3 所示及圖 2-9 所示。A、B 二點計算結果其像點位置均方根 σn平均為 0.027, 平均偏差量 di 為 0.0058。因此,可知系統誤差對於程式計算影響甚 小。 ─ ─ (2-13)
30 2.4 三角測距量測法水位計算 本程式為自行開發係由Fortran 語法寫成,將網路攝影機拍攝擷 取不同水位浮板上之 LED 光源進行影像過濾,並將處理後之檔案以 濾光後之ASCII 型式再次儲存,最後以三角測距量測法程式進行計算。 由(1-9)式與圖 1-13 可知,若鏡頭為不可變焦之情況下,觀測物體(本 研究係指浮板上光源)越接近鏡頭時,其像點會越遠離中心光軸如圖 2-10 及 2-11 所示。 試驗中擷取之影像浮板上方三個光源,計算三光源至光軸形心位 置(若鏡頭固定,光軸位置為固定座標不會因水位而改變)以圖形上之 實際位置由 U 上、U左及 U 右所示,若程式計算出上述三值非常接近, 則由(1-9)式推論其鏡頭至三光源點之距離 Z上、Z左及Z右也近乎相等, 表示浮板受到擾動較少且系統配置良好。系統設定中,實際浮板上光 源與鏡頭光軸距離為已知值 B,由圖 1-13 可知其光學系統之成像距 離 I 為固定值,因此,僅需求得成像距離 I,即可推求光源影像形心 與光軸間距離 U1,推算鏡頭至浮板間之實際距離。實驗配置與步驟 如下: 1. 將浮板以光軸為中心,設置三個白色 LED 燈泡與光軸實際距離 B 為 cm,成正三角形等距分佈。 2. 鏡頭與光源之實際深度 Z 為控制變因,故為已知值。
31 3. 於相同深度 Z 分別拍攝 640X480 及 1280×960 二組解析度之相片, 並將其轉換為 ASCII 檔案。 4. 由Z 上= Z左= Z右,代入(1-9)式求得 上 左 右 。 5. 底部至網路攝影機鏡頭之高度為75.6cm。 試驗結果如表 2-5 及 2-6 所示,計算結果解析度為 640×480 之平 均成像距離 I 為 21.142cm,並將結果帶入(1-10)式,計算出光源位置 與感測器距離 Z 與光軸間之距離 U1之關係式,並由圖 1-13 可知水位 Y 與感測器之距離 Z 之關係,推導出計算水位公式 ; 同理,解析度 1280×960 之成像距離 I 為 36.896cm,其水位 Y 與鏡頭 成像與光軸間之距離 U1之計算公式為 ,後續試驗使 用此二公式進行計算。試驗流程如圖2-12 所示。 2.5 三角光學式測距水位計試驗設計 本節進行靜止水位及動態之流況水位試驗之設計,分別於相同水 位拍攝 640×480 及 1280×960 Pixels 二組不同解析度圖片進行比較分 析。在靜止水位試驗部分,將三角光學式水位計擺放於國立交通大學 土木工程系河川輸砂試驗室可傾式水槽後方之循環儲水槽內,於不同 水位下與黏貼壁面之水尺進行誤差比較。動態流況水位試驗部分,將 本研究所設計之三角光學式測距水位計放置於可傾式水槽之渠道中
32 段位置,動態流況試驗之控制變因分別為固定馬達頻率使其流量相等 調整後方尾水板高度,並使用由標尺量測實際水位誤差情形,試驗水 槽與水位計擺放配置如圖 2-13 所示。 2.5.1 靜止水位試驗配置 本試驗為探討三角光學式測距水位計使用不同解析度分析下,量 測循環儲水槽內相同水位並進行誤差範圍分析。試驗設置擺放如圖 2-14 所示,試驗設定參數為: (1)影像解析度為 640×480 及 1280×960 Pixels。 (2)水位觀測範圍 0 至 50 cm。 (3)儀器濾光門檻值 200 畫素值亮度。 (4)使用可傾式水槽後方儲水槽做為試驗位置。 (5)靜穩之水位。 (6)使用水尺量測實際水位。 (7) 使用黏貼於壁面之水尺量測實際水位,並拍攝 640×480 及 1280× 960 二種不同解析度分析圖片,進行相同水位下實測值與誤差分析比 較,實際試驗設置如圖 2-18 所示。 2.5.2 水槽動態流況之水位計試驗配置 1. 渠道結構 本研究設計之三角光學式測距水位計,係針對廣泛設置於易淹水
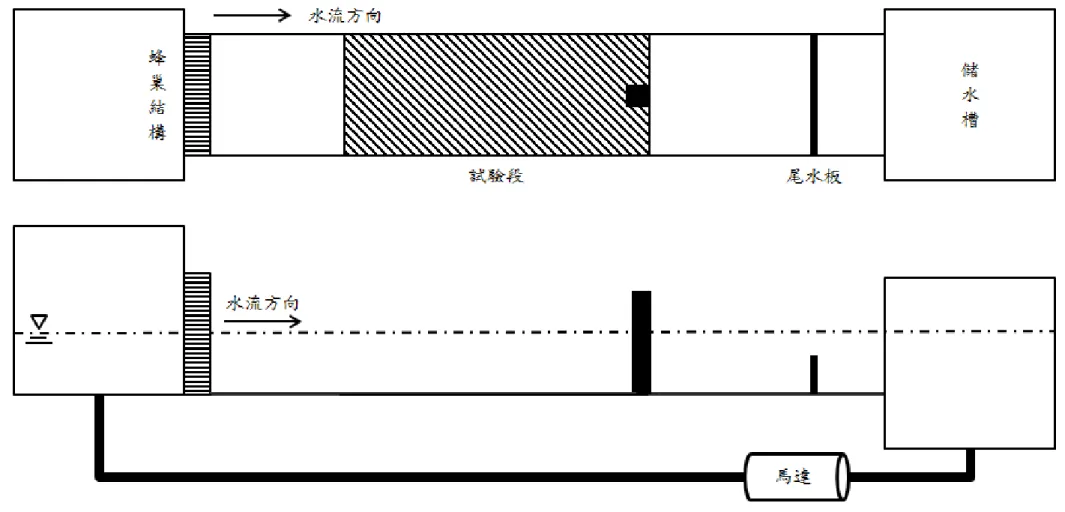
33 地區所設計,而實際之淹水事件,常有水流動之情況,與實驗室蓄水 槽之靜止水位試驗不盡相同。因此,使用可傾式水槽進行動態流況試 驗,水槽規格為:長 10 公尺、寬 0.4 公尺、高 0.5 公尺、坡度為 0.005 之循環水槽。其中定義試驗室可傾式水槽,底面即是水位為 0 之基準 點,並與水槽旁架設之游標尺,進行及分析不同解析度之水位誤差比 較。 2. 渠道流況 水槽前端入流口處,目的為使水流能夠平穩進入試驗段,降低 水位計受到不必要之干擾,因而設置一蜂巢結構(Honeycomb)如圖 2-15 所示。 3. 供水系統 為了解渠道中流量與馬達頻率之關係,係做為流量調整之依據。 而調整觀測水位並與流量比對,進行馬達頻率經迴歸分析試驗,求得 水槽流量率定公式為流量 Q=0.0003X-0.0012 cms,最小二乘方誤差 R2為 0.98,其中 X 為馬達頻率,如圖 2-16 所示。 4. 試驗設定參數 (1) 影像解析度為 640×480 及 1280×960 Pixels。 (2)水位觀測因水槽高度限制為 0 至 30 cm。 (3)渠道坡度為 0.005。
34 (4)濾光門檻值 200 畫素亮度。 (5)控制變因:固定馬達頻率為使流量相等改變為水板高度,控制渠 道內之水深。尾水板如圖 2-17 所示。 (6)動態流況之水位。 (7)使用水槽旁架設之游標尺量測實際水位,並拍攝 640×480 及 1280 ×960 二種不同解析度分析圖片,進行相同水位下實測值與誤差分析 比較,實際試驗設置如圖 2-18 所示。
35
第三章
試驗結果與討論 本章節進行探討試驗誤差與分析,共分為二部分。第一部分為 將本研究之三角光學式測距水位計,進行一系列不同條件之實驗室水 槽水位量測,進行實際值與量測水位之誤差比較,探討其誤差來源及 因素,最後將計算之誤差量進行平均值標準差(SEM)計算,以了解其 誤差範圍是否符合美國國家環境保護局所提出量測精度規範。第二部 分係參考經濟部水利署「地下水位觀測系統儀器建置標準之建立 (2005)」報告,將三角光學式測距水位計之試驗結果,與報告中二種 浮筒式及一種壓力式水位計之檢校實測值,共同進行誤差探討與比 較。 3.1 靜止水位試驗結果 由圖 3-1 及表 3-1 結果可知,解析度 640×480 之靜水位試驗,其 平均絕對誤差量為 0.316cm、誤差量之標準差為 0.184cm,由(2-14) 式 可得其量測平均誤差區間為 0.316±0.04cm。1280×960 之靜水位試驗 結果由圖 3-2 及表 3-2 所示,得其平均絕對誤差量為 0.187cm、誤差 量之標準差為 0.121cm,平均誤差區間 0.187±0.0263cm。將水尺量測 之實測水位值代入(2-9)式中,可計算出成像與光軸之實際距離 U1,36 並分析其量測與實際 U1之誤差,其結果如表 3-3 及 3-4 所示,兩組試 驗 U1之誤差量分別為 0.0106cm 及 0.0107cm。可知本研究之三角光學 式測距水位計,U1之誤差量並不因解析度增加而上升,而在 U1之誤 差量相同之前提下,僅改變解析度大小即可有效提昇量測之準確度。 並且,1280×960 之實驗室靜水位試驗結果,符合美國國家環境保護 局所提出量測精度小於±0.01ft,約±0.3cm 之誤差規範。 3.2 水槽動態流況試驗結果 在試驗室水槽動態流況水位試驗中,使用馬達頻率為 12Hz、渠 道坡度為 0.005,流量約為 0.0024cms 之定量均勻流下進行試驗,並 使用架設於渠道壁面傍之游標尺進行水位量測。本研究之三角光學式 測距水位計易有內外水高度不同之問題,因此,在不破壞壓克力外殼 結構下,特將外殼底部增加直徑約 0.5cm 之小孔,以改善內外水高度 不同之問題。 由圖 3-3 及表 3-5 結果可知,解析度 640×480 之動態水位試驗, 其平均絕對誤差量為 0.507cm、誤差量之標準差為 0.179cm,由(2-12) 式可得其量測平均誤差區間為 0.507±0.04cm。1280×960 動態水位試 驗結果由圖 3-4 及表 3-6 所示,得其平均絕對誤差量為 0.275cm、誤 差量之標準差為 0.175cm,平均誤差區間 0.275±0.039cm。由此二試
37 驗結果,可知U上、U左及U右三者相對差值小於3 個 Pixels(約 0.08cm), 表示本水位計於實驗室紊流情況下,內部浮板受到水流擾動之情況並 不明顯。但由圖 3-3 及 3-4 發現 640×480 及 1280×960 動態水位試驗 結果,大多小於外壁游標尺量測之實際水位值,且在實際水位趨近於 20cm 時,量測偏低之情形更為明顯。本研究選用壓克力外殼主要為 了遮蔽外在光源干擾其計算結果,但箱子外殼卻阻擋水流進入箱子內 部造成內外水高度無法瞬間達至平衡,內外水高度差由實測結果可推 算約為 0.4cm。經比較 640×480 及 1280×960 解析度,在相同水位換 算下,1280×960 解析度計算之平均誤差較小,且精確度較高。 3.3 二組試驗綜合討論 由實驗結果可知,不論靜態或動態水位試驗中,若將 640×480 約 30 萬格網點之計算放大為 1280×960 約 120 萬格網點,可有效提升其 計算精確度以及降低浮板擾動所引起之誤差,但其計算時間卻從二秒 提升至約略十秒,因此,須考慮其量測解析度與計算時間之問題。由 二試驗結果如表 3-1 至表 3-6,可知各組水位計算均為獨立事件,係 在不同水位試驗下 U1均以不同之相似三角形比例關係量測水位 Y。 因此,在不考慮儀器設計不良造成系統誤差下,不會因量測之水位上 升而導致誤差量之累積。
38 3.4 試驗與市售儀器誤差比較 經濟部水利署「地下水位觀測系統儀器建置標準之建立(2005)」 報告中,針對第五及第七河川局之 Keller PR-36XW、WLS-2109e 壓 力式及 W761 電子浮筒式水位計全面檢校調整。其中壓力式水位計檢 校,係將不同水位所對應之大氣壓力注入壓力感測器內,判讀其量測 及設計結果之誤差。而電子浮筒式水位計檢校部分,將電子浮筒式水 位計放置於已知水位之深井內,依照不同深度儀器判讀當下之電位, 自動調整對應之電阻值進行水位之換算,詳細規格見表 3-7。在其規 範中,壓力式水位計量測精度須小於±0.1% 全尺寸(Full-Scale,FS) 誤差,且總誤差量須小於 3cm。經檢校結果顯示,兩種壓力式水位計 Keller PR-36XW 及 WLS-2109e,FS 分別為 0.16%及 1.09%,均大於 0.1%,且總誤差量均大於 3cm。浮筒式水位計之觀測精度須小於±1cm, 而實際平均誤差量為 25.74cm,與規範所需之觀測精度相差甚遠。因 此,可知市售之水位儀器均無法達到其規範標準。本研究之三角光學 式測距水位計,於實驗室中均勻動態水位試驗之結果與三種市售水位 計之比較如表 3-8 所示,雖實驗之結果較市售之水位計為優,但未來 須進行現地之量測試驗以確認之。
39
第四章
結論與建議 本研究之三角測距量測水位計,使用網路攝影機(Webcam)連結電 腦,進行實驗室靜態與動態水位試驗,拍攝浮板上影像解析度分別為 640×480 及 1280×960,因水位高度變化而改變 LED 光點位置之二張 圖片。程式係使用光學形心法計算 LED 光點之形心座標,三角測距 量測法進行水位計算。經試驗結果綜合討論、誤差分析比較後,獲致 如下結論與建議: 4.1 結論 1. 本研究成功設計初硬體取得容易、造價便宜、擷取影像解析度高, 並將 LED 燈光源代替昂貴之雷射光發射器之三角測距量測水位計, 研究室靜態水位試驗中解析度為 1280×960 之測試結果,符合美國國 家環境保護局所提出量測精度須小於±0.01ft(約±0.3cm)之量測規範。 2. 由三角測距量測法公式推導,僅需得知螢幕上像點形心與光軸間 之間距,可有效計算其三維深度變化,因此,可用簡單之拋物線方程 式推估水位。由實驗室試驗結果可判斷其各項測試均為獨立事件,在 水位上升之情況下,並無誤差累積導致誤差量上升之情形。40 3. 計 算 水 位 之 方 程 式 解 析 度 為 640 × 480 水 位 計 算 方 程 式 , 。解析度 1280×960 水位計算方程式為 。其中,Y 為計算水位,U1為鏡頭成像與光軸間之距離。 4. 解析度 640×480 靜水位試驗之平均誤差範圍量 0.316±0.04cm;動 水位平均誤差範圍量 0.507±0.04cm。解析度 1280×960 靜水位試驗之 平 均 誤 差 範 圍 量 0.187±0.0263cm ; 動 水 位 平 均 誤 差 範 圍 量 0.275±0.039cm。因此,提高擷取影像之解析度,能有效降低計算之 誤差範圍及提升精確度。 4.2 建議 1. 本研究最大誤差及設備費用來自於壓克力製外殼,本研究選用壓 克力外殼主要為了遮蔽外在光源干擾其計算結果,卻導致內外水高度 不同及提高製作成本。因此,建議製作一固定鐵架將鏡頭固定於測試 區域,外殼可使用大型水管等遮光良好材質掩蔽,以達到節省成本及 降低干擾內部水體流動之情形。 2. 程式開發部分建議全使用 Java 語法寫成,本次試驗擷取及計算之 影像圖片僅為 20Kb,因此,現地僅需使用影像擷取與回傳設備,將 擷取之圖片傳送回雲端主電腦即可立即進行水位計算即發佈警訊。 3. 本次試驗使用三個 LED 燈光源,係為了增加 U1之準確度,但相 對其計算量,較兩個光源計算時間為長,未來建議進行最佳光源個數
41 與精確度之關係,以提升精確度及降低計算時間。 4. 提升解析度為可行之精確度提升方式,但其計算時間相對也會因 此增加,未來應建立最佳解析度與計算時間之關係,以達到即時記錄 及發佈警戒等功能。 5. 浮板傾斜與擾動為影響本試驗及未來研究之重要問題,若能將浮 板設計加以改良,如:使用上升軌道或改變形狀等方式;及使用程式 自動較正浮板傾斜與擾動之問題,如:連接正三角形光源形心計算其 面積變化、探討各邊長之變形與角度變化,將可有效提升其精確度, 以利於未來之儀器開發。 6. 未來建議將改良設計後之水位儀器,進行現地水位測試,以瞭解 及改進資料傳輸、量測誤差、耐用性等實務問題。
42
參考文獻
1. Alexander, B.F. and Ng, C.K., 1991.Elimination of systematic error in subpixel accuracy centroid estimation. Optical Engineering,Vol.30, pp.1320-1331.
2. Alan, J. L., Hironobu, F., and Raju, S., 1998. Moving target classification and tacking from real-time video. Proc. IEEE Workshop Applications of Computer Vision (WACV), pp. 8-14.
3. Arattano, M. and Grattoni, P., 2000. Using a fixed video camera to measure debris-flow surface velocity. Proceeding of the Second International Conference on Debris-flow Hazards Mitigation, pp. 273-281.
4. Discant, A., Rogozan, A., Rusu, C., and Bensrhair, A., 2007. Sensors for obstacle detection a survey. 30th International Spring Seminar on Electronics Technology,pp. 100-105.
5. Lin, D., Natalia, C.A., Chen, S., Greenaway, A.H., Towers, C.E., and Towers. D.P., 2008. Three-dimensional particle imaging by defocusing method with an annular aperture. Optics Letters, Vol.33, pp. 905-907. 6. Fukami, K., Yamaguchi, T., Imamura, H., and Tashiro, Y., 2008.
Current status of river discharge observation using non-contact current meter for operational use in Japan. World Environmental and Water Resources Congress, pp. 1-10.
7. Grant, D.M., 1978. Open channel flow measurement handbook. Instrumentation Specialties Company, Lincoln, NB, pp. 6-7.
8. Grothe, R.L. and Dabiri, D., 2005. An improved three-dimensional characterization of defocusing digital particle image velocimetry
43
(DDPIV) based on a new imaging volume definition. Measurement Science and Technology, Vol.19, 065402.
9. Kajitani, L. and Dabiri, D., 2005. A full three-dimensional characterization of defocusing digital particle imagevelocimetry. Measurement Science and Technology, Vol.16, pp. 790-804.
10. Liang, D.F. and Jiang, C.B., 2002. A combination correlation-based interrogation and tracking algorithm for digital PIV evaluation.Experiments in Fluids, Vol.33, pp. 684-695.
11. Morgan, J.S., Slater, D.C., Timothy, J.G., and Jenkins, E.B., 1989. Centroid position measurements and subpixel sensitivity variations with the MAMA detector. Journal of Optics A: Pure and Applied Optics, 28(6):1178-1192.
12. Nitzan, D., Brain, A.E., and Duda, R.O., 1977.The measurement and use of registered reflectance and range data in scene analysis. Electrical and Electronics Engineers, Vol. 65, pp. 206-220.
13. Okamoto, K., Ikeda, K., and Murata, S., 2003. Development of dynamic digital holographic particle velocimetry. 5th International Symposium on Particle Image Velocimetry, Paper No. 3103.
14. Pereira, F., Gharib, M., Dabiri, D., and Modarress, D., 2000. Defocusing digital particle image velocimetry:a 3-component 3-dimensional DPIV measurement technique.Application to bubbly flows. Experiments in Fluids, Vol. 29, pp.78-84.
15. Pereiral, F. and Gharib, M., 2002. Defocusing digital particle image velocimetry and the three-dimensional characterization of two-phase flows. Measurement Science and Technology, Vol. 13, pp. 683–694. 16. Rosenfeld, A. and Kak, A. C., 1976. Digital picture processing. Vol. 1,
44 Academic Press, New York.
17. Radke, R.J., Andra, S., Al-Kofahi, O., and Roysam, B., 2005. Image change detection algorithms: a systematic survey. IEEE Transactions On Image Processing, Vol.14, No. 3, pp.294-307.
18. Sweet, H.R., Rosenthal, G., and Atwood, D.F., 1990. Water level monitoring-achievable accuracy and precision. Grand Water and Vadose Zone Monitoring, STP 1053. pp.178-192.
19. Stannard, D.I. and Rosenberry, D.O., 1991. A comparison of short-term measurements of lake evaporation using eddy correlation and energy budget methods.Journal of Hydrology,Vol.122, pp. 15-22. 20. Sang, Y. and Kyung, K., 2006. 3D particle position and 3D velocity
field measurement in a microvolume via the defocusing concept. Measurement Science and Technology,Vol.17, pp. 2897-2905.
21. Takahiro, Y., Shigeru, M., and Takafumi, M., 2006. Three-dimensional flow measurement by digital holographic particle image velocimetry with spatio-temporal derivative method. JSME Internation Journal series B, Vol.49, pp. 1133-1140.
22. United States Geological Survey, 1999. Water level sensor and datalogger testing and demonstration. ITRC Report No. R 99-002. 23. Willert, C.E. and Gharib, M., 1991. Digital particle image velocimetry.
Experiments in Fluids Vol. 10, pp. 105-146.
24. 李維順(2006),「整合無線感測器網路的即時影像監視系統」, 國立清華大學資訊工程學系碩士論文。
25. 吳軒孝(2007),「雷射線結構光應用於物體表面及 3D 輪廓之精細 量測」,國立中央大學光電科學研究所碩士論文。
45 26. 林國暉(2006),「土石流表面速度影像估算方法之研究」,國立 成功大學水利及海洋工程學系碩士論文。 27. 林千翔(2011),「土應用數位質點影像技術之災害預警系統研發」, 國立台灣海洋大學系統工程暨造船學系碩士論文。 28. 陳郁鴻(2005),「光學三角測量方法量測家蠶肌肉振動與脈搏變 化之研究」,國立中央大學生命科學研究所碩士論文。 29. 蔡宗旻(2004),「超音波水位計量測方式改良及水位數據之品管 檢核」,國立成功大學水利及海洋工程研究所碩士論文。 30. 鍾宜岑(2007),「應用於動態背景中的移動物體影像之偵測與即 時追蹤系統」,國立交通大學電機學院IC設計產業研發碩士班碩 士論文。 31. 國立成功大學水工試驗所(2003),「雨量站定位及河川水位觀測站 量測與傳輸系統整合之研發補助計畫」,經濟部水利署委託研究計 畫報告。 32. 國立宜蘭大學(2011),「宜蘭縣自記式水位監測系統設立與淹水災 損地理資訊系統整合規劃計畫成果報告」,經濟部水利署第一河川 局委託研究計畫成果報告。 33. 國立臺灣大學水工試驗所(2006),「固床工下游魚漥棲息空間之流 場試驗與模擬(2/2)」,行政院國家科學委員會專題研究計畫成果報 告。 34. 中興工程顧問股份有限公司(2005),「地下水位觀測系統儀器建置 標準之建立」,經濟部水利署委託研究計畫報告。 35. 黃福坤(2008),「普通物理實驗手冊」,國立台灣師範大學物理學 系。 36. 呂珍謀(2008),「影像分析方法應用於土石流表面速度計算之研 究」,農業工程學報,第 54 卷第 1 期,pp.16-25。
46
類型 型式 構造及說明
非自記水位計 Non-Recording Gage
直接讀記水標尺 Direct reading gage
標竿水尺
Staff gage 刻度通常為琺瑯質銅板,可分段用螺絲釘於垂直之木樁或壁岩上。
斜標水尺 Incline staff gage
其適用於傾斜岸坡之處,用水準測量就地刻劃分度,藉此刻度所示者極 為準確之垂直高度。 量測水尺 Measuring gage 鏈水尺 Chain gage 水位高度刻在水平木板上,環鏈附於其上移動,經滑輪而為垂直方向上 下,鏈之下端吊一垂重與水面相觸,可在水平板上讀得水位。 鉤水尺 Hook gage 其為一可滑動之標竿及固定框架、標竿上有刻度,讀數字上而下,下端 裝有鐵質倒鉤,框架上設游尺,讀數自下而上,由水面與鉤尖相觸可讀 水位高度。 電滯水尺 Electric tape gage
鋼尺繞於軸上,軸上附裝計數器,利用電池操縱鋼尺上下,讀取水位高 度。
懸重水尺 Wire weight gage
其為金屬繩或小索繞於轉筒上,轉筒上有刻度或計數器,用於測量金屬 繩另一端之垂直至水面時之水位高度。 浮標水尺 Float gage 相當高度上裝一滑輪,有刻度之鋼尺在滑輪上下移動,鋼尺之一端裝浮 標,另一端裝垂重,水位漲落,浮標隨之移重,可自鋼尺上讀水位高度。 洪峰水尺 Crest-stage gage 係徑約五公分之鑄鐵管,嵌附河岸或墩柱上,管之二端均靠可旋轉之帽 蓋,管之下端鑿有若干小孔,管中置放薄片木尺,管底置軟木碎屑,當 水位上升時,水由下端小孔入管中,軟木碎屑隨沾於木尺上,水退後軟 木屑並不立即脫落,據之可測定洪峰水位。 表 1- 1 常見的水位計種類及說明(蔡宗旻 2004)
47 類型 型式 構造及說明 缺點 自記式水位計 Water stage recorder 浮筒式自記水位計 Float-type gage 利用浮筒接觸水面昇降浮動,由引線與配重帶動自記水位計 轉輪,而達成水位之自動記錄。 雖然造價相對其他水位計較為便 宜,但入水口容易淤砂阻塞,維修保 養需求及金費可觀。 壓力式自記水位計 Pressure type gage
利用壓力感測計將水位升降所產生之水壓變化轉換為電器信 號,而以數位記錄器記錄儲存於記憶體中。
容易受到溫度以及密度的改變影 響,因此須建立量測參數修正。 超音波式自記水位計
Ultrasonic type gage
利用至於井口或水下之超音波轉換器(探頭)定時發出音波, 由音波接觸水面反射的時間推算水位深度。
造價昂貴,溫度變化是主要的誤差來 源。
電容式自記水位計 Capacitance type gage
實驗室使用之水位計,利用電極點與水位接觸發生靜電容量 之原理,電容大小隨水位變化而找出二只間之固定關係。
造價不斐,因為實驗室專用,因此量 測範圍以及限制較多。
電極觸針式自記水位計 Electrode needle type
gage 由步進馬達帶動導線與電極,以電子回傳電路來追蹤水面, 馬達的轉動透過導線牽引而帶動記錄轉軸得到水位記錄。 非常不適合用於水位變動平凡的區 域。 氣泡式自記水位計 Bubble type gage
將氣體導送至水中之細管,由於細管中的氣泡不斷放 出,則使得水壓與細管之氣體壓力趨近相同,並將氣壓 的情形推算出液面高度。 水位計保養費用昂貴,且精確度 在波高狀態只能達到一公分。 雷達波式自記水位計 Radar type gage
以天線連續發射頻率於 9.55GHz 至 10.55HGz 之間的雷射波 訊號,使用接收器接受從水面反射回的訊號推算水位。
雖然不受到溫度變化的影響,但 造價非常的昂貴。
雷射式自記水位計
Laser type gage 以雷射訊號量測水面至量測器的直接距離。
價格昂貴,且容易受到水面漂浮 物等影響。
48 表 2- 1 Logitech C310 網路攝影機規格