國
立
交
通
大
學
機械工程學系
碩
士
論
文
數
位
條
紋
投
射
法
量
測
胸 腔 外 形 三 維 點 資 料 之 處 理 與 應 用
Processing and application of 3D data points by digital fringe
projection method for the ribcage shape measurement
研 究 生:鍾宜達
指導教授:秦繼華 教授
數位條紋投射法量測
胸腔外形三維點資料之處理與應用
Processing and application of 3D data points by digital fringe
projection method for the ribcage shape measurement
研 究 生:鍾宜達 Student:Yi-Ta Chung
指導教授:秦繼華 Advisor:Dr. Jih-Hua Chin
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Engineering
June 2007
Hsinchu, Taiwan, Republic of China
數位條紋投射法
量測胸腔外形三維點資料之處理與應用
學生:鍾宜達
指導教授:秦繼華 教授
國立交通大學機械工程學系碩士班
摘 要
本論文研究漏斗胸病患胸腔外形量測三維點資料之處理技巧及其應用,三維點資料 乃由兩台不同視角的相機分別利用數位條紋投射法取得。首先發展結合兩組不同視角點 資料之自動對位與整合方法。在兩組點資料之對位時,經由指定兩組不同視角點資料之 對應相同特徵點,本研究發展一套有效的演算法以找出最佳之座標系統平移及旋轉矩陣 以結合兩組點資料。在資料點之整合時,發展平均混成、線性混成及二次混成等三種方 法將兩組點資料整合成一組沒有縫隙及沒有多餘部分之平滑表面。接著發展一套軟體系 統,可以進行兩組點資料之顯示、對位、整合與後處理等工作,此軟體系統使用 Visual C++程式語言發展而成。最後,將本文發展之系統應用於漏斗胸病人之胸腔外形量測, 在置入固定桿件手術之前與之後分別量測病人之胸腔外形,經由比較手術前後之胸腔外 形,可評估手術之效果。 關鍵字:數位條紋投射法、三維點資料整合、三維點資料對位、表面重建、漏斗胸Processing and application of 3D data points by digital fringe
projection method for the ribcage shape measurement
Student: Yi-Ta Chung
Advisor: Dr. Jih-Hua Chin
Department of Mechanical Engineering
National Chiao Tung University
ABSTRACT
This thesis studies the processing techniques and applications of 3D data points in the shape measurement of the ribcage for patients with funnel chest. The 3D data points are acquired by the digital fringe projection method from two different camera views. First, automatic registration and integration methods for combining two point sets of different views are developed. In registration of data points, points of the same feature in two different data sets are specified, and a robust algorithm is developed for finding the best coordinate translation and rotation matrices that combine two point sets. In integrating data points, average blending, linear blending, and quadratic blending methods are developed such that two data sets are integrated into one seamless and non-redundant smooth surface. Then, a software system is developed for data points display, registration, integration, and post processing for the two point sets. The software system is developed using Visual C++ language. Finally, the developed system is applied in the ribcage shape measurement for patients with funnel chest. The ribcage shapes of a patient before and after the surgery for placing a fixation bar inside the chest are measured. The effect of the surgery can be evaluated by comparing the ribcage shapes before and after the surgery.
Keywords: digital fringe projection method, 3D points registration, 3D points integration, surface reconstruction, funnel chest
誌 謝
回首過去兩年,研究的過程中遇到了各式各樣的困難,幸好身邊總是有著許多有能 力給予我幫助並且也非常樂意給我幫助的人。首先,我要特別感謝的是我的指導教授秦 繼華老師,從大三認識秦老師以來,經歷了四年的時間,非常感謝秦老師的諄諄指導與 教誨;秦老師不只指導了我的專業學術知識、培養我獨立解決問題的能力,更在人生的 方向與意義上,也讓我有了不少的瞭解與領悟。感謝長庚醫院兒童部主任兼任交通大學 機械工程學系醫學工程授課教授張北葉醫師,沒有您的熱心指導並且給予醫工合作的機 會,就不會有本論文的產生。並感謝口試委員 XXX、XXX 與 XXX 的細心指正與建議,另 本論文更臻完善。也要感謝實驗室的學長權原、俊凱,同窗俊傑、永祥、威凱,學弟偉 源、奕承、孟諭、彥男,謝謝你們在我奶奶重病與過逝的那段期間,給予我最大的幫助 與慰問,讓我的研究與學校課業沒有因為家中有些負擔而中斷,得以用兩年的時間順利 從實驗室畢業,與你們一同討論、切磋課業與研究的時光,我將會永遠放入最美好的記 憶裡。感謝父親不分晝夜的從旁協助。感謝母親、姊姊與弟弟在我研究遇到瓶頸情緒低 落時,總是給予我最多的包容與鼓勵。感謝台灣大學機械工程學系 CAD 實驗室的每一位 成員,你們熱心不分彼此的協助,讓我論文得以從落後的進度中迎頭趕上。 最後感謝每一位曾經給我打氣的死黨、同學、朋友們,沒有你們一路的陪伴與支持, 就沒有堅持到最後的我。在此感謝所有幫助、提攜過我的人,真的謝謝你們,以本論文 獻給你們。目 錄
頁次 中文摘要 ……… i 英文摘要 ……… ii 誌謝 ……… iii 目錄 ……… iv 圖目錄 ……… vii 一、 緒論……… 1 1.1 研究背景……… 1 1.2 文獻回顧……… 6 1.2.1 三維點資料對位回顧……… 7 1.2.2 三維點資料整合回顧……… 13 1.3 研究動機與目的……… 18 1.4 研究方法……… 23 二、 三維點資料處理之基本理論……… 26 2.1 使用最小平方法尋找最適合的平面……… 26 2.2 尋找一個最合適於多點三維點資料之拋物面……… 28 2.3 座標轉換矩陣……… 30 2.3.1 平移……… 30 2.3.2 旋轉……… 31 2.3.3 映像……… 32 三、 三維點資料之處理與軟體系統發展……… 343.1 讀取三維點資料……… 35 3.2 選取特徵點……… 38 3.3 進行三點對位……… 42 3.4 重新佈點……… 48 3.5 混成……… 50 3.6 網格化鋪面……… 54 3.7 剖面圖……… 58 四、 醫學工程應用之胸腔三維取像案例……… 60 4.1 漏斗胸男童病患手術前……… 63 4.2 漏斗胸男童病患手術矯正後……… 67 4.3 手術前後之比較……… 72 4.4 漏斗胸青春期女姓病患手術矯正後……… 77 五、 結論與未來展望……… 82 5.1 結論……… 82 5.2 未來展望……… 83 參考文獻 ……… 84
附錄 A 程式 Color Fringe Projection System 使用步驟……… 88
附錄 B 程式 Data registration and integration for 3D shape measurement system 主程式碼……… 92
B.1 程式安裝說明……… 92
B.1.1 基本需求……… 92
B.1.3 環境設定……… 93 B.2 程式碼檔案介紹……… 96 B.2.1 核心程式碼……… 96 B.2.2 系統設定檔……… 97 B.2.3 外部引用程式碼……… 97 B.3 系統主程式介面與程式碼說明……… 98 B.3.1 主程式介面……… 98 B.3.2 對位區介面說明……… 99 B.3.3 整合區介面說明……… 101 B.3.4 其他功能說明……… 102 B.4 系統函式說明……… 103 B.4.1 主程式附屬函式說明……… 103 B.4.2 數值方法函式說明……… 105 B.4.3 矩陣運算函式說明……… 106 B.5 程式操作說明……… 106 B.6 列出程式主程式碼……… 111 B.6.1 三點對位運算主程式碼……… 112 B.6.2 單點對位運算主程式碼……… 112 B.6.3 整合運算主程式碼……… 113 B.6.4 左側視角三維點資料網格化鋪面主程式碼……… 113 B.6.5 右側視角三維點資料網格化鋪面主程式碼……… 114 B.6.6 完成對位三維點資料網格化鋪面主程式碼……… 114 B.6.7 擷取剖面主程式碼……… 114 作者簡歷 ……… 116
圖 目 錄
頁次 圖 1.1 不同圖案之結構光示意圖……… 3 圖 1.2 數位條紋投射法量測方式示意圖……… 5 圖 1.3 條紋結構光……… 5 圖 1.4 特徵對位示意圖……… 8 圖 1.5 校正樣本將兩個座標系統轉換單一座標系統示意圖……… 8 圖 1.6 Chua 自訂之幾何特徵示意圖……… 9 圖 1.7 各種特徵點的分析圖……… 10 圖 1.8 ICP 演算法示意圖 ……… 11 圖 1.9 校正框架……… 12 圖 1.10 校正塊……… 12 圖 1.11 十字記號圖樣……… 12 圖 1.12 線圖樣……… 12 圖 1.13 Sitnik 矩形圖樣……… 13 圖 1.14 Chen 矩形圖樣……… 13 圖 1.15 兩組點資料設定示意圖……… 14 圖 1.16 兩組點資料之掃描線與交界點示意圖……… 15 圖 1.17 進行混成的資料點示意圖……… 16 圖 1.18 線性混成與二次混成之結果比較……… 17 圖 1.19 整合示意圖……… 17 圖 1.20 嬰兒頭型異常資料照片……… 18 圖 1.21 頭盔製作過程 打模……… 19 圖 1.22 頭盔製作過程 打模……… 19 圖 1.23 頭盔製作過程 灌製石膏模……… 20圖 1.24 頭盔製作過程 灌製石膏模……… 20
圖 1.25 頭盔製作過程 矯正帽完成……… 21
圖 1.26 漏斗胸兒童病患微創手術案例……… 22
圖 1.27 漏斗胸兒童病患傳統手術案例……… 23
圖 1.28 本論文之研究方法流程圖……… 24
圖 3.1 Color Fringe Projection System 硬體架設示意圖……… 34
圖 3.2 左邊相機原始圖像……… 36 圖 3.3 右邊相機原始圖像……… 36 圖 3.4 左邊相機條紋投射圖像……… 36 圖 3.5 右邊相機條紋投射圖像……… 36 圖 3.6 左邊視角相機取得之三維點資料……… 37 圖 3.7 左邊視角相機取得之三維點資料……… 37 圖 3.8 右邊視角相機取得之三維點資料……… 37 圖 3.9 右邊視角相機取得之三維點資料……… 37 圖 3.10 選取特徵點附近之任何一點……… 38 圖 3.11 距離選取點最近之 1400 點資料……… 39 圖 3.12 距離選取點最近之 1400 點資料……… 39 圖 3.13 找出特徵點資料集合之特徵平面法向量……… 40 圖 3.14 找出特徵點資料集合之特徵平面法向量……… 40 圖 3.15 距離選取點最近之 200 點資料……… 41 圖 3.16 距離選取點最近之 200 點資料……… 41 圖 3.17 求得拋物面,並尋找其頂點……… 42 圖 3.18 求得拋物面,並尋找其頂點……… 42 圖 3.19 對位結果……… 47 圖 3.20 對位結果-臉部特寫……… 47
圖 3.21 選取重新佈點之矩型範圍……… 48 圖 3.22 左邊視角三維點資料經重新佈點後之三維點點狀圖……… 49 圖 3.23 右邊視角三維點資料經重新佈點後之三維點點狀圖……… 50 圖 3.24 平均混成結果點圖……… 51 圖 3.25 線性混成結果點圖……… 52 圖 3.26 二次混成結果點圖……… 53 圖 3.27 左邊視角三維點資料之三維鋪面圖……… 55 圖 3.28 右邊視角三維點資料之三維鋪面圖……… 55 圖 3.29 平均混成結果鋪面圖……… 56 圖 3.30 線性混成結果鋪面圖……… 57 圖 3.31 二次混成結果鋪面圖……… 57 圖 3.32 點選得水平剖面圖之水平位置……… 58 圖 3.33 計算並繪出剖面圖……… 59 圖 3.34 剖面圖刪除網格化鋪面……… 59 圖 3.35 剖面圖結果呈現……… 59 圖 4.1 胸腔外形三維點資料之處理與應用軟體運算流程圖……… 61 圖 4.2 取得特徵點之運算流程圖……… 62 圖 4.3 拋物面所需點資料預設值 200 輸入改成 50……… 63 圖 4.4 依序點選對位依據特徵點……… 63 圖 4.5 特徵點之特徵方向……… 64 圖 4.6 特徵點之特徵方向……… 64 圖 4.7 合適之拋物面……… 64 圖 4.8 依序點選對位依據特徵點……… 64 圖 4.9 完成三點對位……… 65 圖 4.10 完成三點對位……… 65
圖 4.11 左側相機取得之三維點資料……… 66 圖 4.12 左側相機取得之三維點資料……… 66 圖 4.13 右側相機取得之三維點資料……… 66 圖 4.14 右側相機取得之三維點資料……… 66 圖 4.15 手術前胸腔三維外形展示……… 67 圖 4.16 手術前胸腔三維外形展示……… 67 圖 4.17 左視角條紋影像……… 68 圖 4.18 右視角條紋影像……… 68 圖 4.19 拋物面所需點資料預設值 200 輸入改成 100……… 68 圖 4.20 依序點選對位依據特徵……… 69 圖 4.21 依序點選對位依據特徵……… 69 圖 4.22 完成三點對位……… 70 圖 4.23 完成三點對位……… 70 圖 4.24 左側相機取得之三維點資料……… 71 圖 4.25 左側相機取得之三維點資料……… 71 圖 4.26 右側相機取得之三維點資料……… 71 圖 4.27 右側相機取得之三維點資料……… 71 圖 4.28 手術後胸腔三維外形展示……… 72 圖 4.29 手術後胸腔三維外形展示……… 72 圖 4.30 微創手術將手術器具穿過胸腔……… 73 圖 4.31 將固定桿件置入胸腔……… 73 圖 4.32 固定桿件旋轉將胸腔稱起……… 74 圖 4.33 乳頭位置圖……… 75 圖 4.34 手術前乳頭高度剖面圖……… 75 圖 4.35 乳頭位置圖……… 75
圖 4.36 手術後乳頭高度剖面圖……… 75 圖 4.37 胸部與腹腔交界位置圖……… 76 圖 4.38 手術前胸部與腹腔交界高度剖面圖……… 76 圖 4.39 胸部與腹腔交界位置圖……… 76 圖 4.40 手術後胸部與腹腔交界高度剖面圖……… 76 圖 4.41 乳頭與胸部、腹腔交界中點位置圖……… 77 圖 4.42 手術前乳頭與胸部、腹腔交界中點高度剖面圖……… 77 圖 4.43 乳頭與胸部、腹腔交界中點位置圖……… 77 圖 4.44 手術後乳頭與胸部、腹腔交界中點高度剖面圖……… 77 圖 4.45 手術治療後之條紋影像……… 78 圖 4.46 左側視角依序點選對位依據特徵……… 79 圖 4.47 右側視角依序點選對位依據特徵……… 79 圖 4.48 完成三點對位……… 79 圖 4.49 完成三點對位-下方視角……… 79 圖 4.50 左側相機取得之三維點資料-左側視角……… 80 圖 4.51 左側相機取得之三維點資料-右側視角……… 80 圖 4.52 右側相機取得之三維點資料-左側視角……… 80 圖 4.53 右側相機取得之三維點資料-右側視角……… 80 圖 4.54 使用線性混成選項……… 81 圖 4.55 女性病患手術後胸腔三維外形展示-左側視角……… 81 圖 4.56 女性病患手術後胸腔三維外形展示-右側視角……… 81 圖 A.1 漏斗胸兒童病患(左)……… 88 圖 A.2 漏斗胸兒童病患(右)……… 88 圖 A.3 擇條紋影像檔儲存資料夾位置……… 89 圖 A.4 左邊相機所取得之圖檔(一)……… 89
圖 A.5 左邊相機所取得之圖檔(二)……… 90 圖 A.6 左邊相機所取得之圖檔(三)……… 90 圖 A.7 左邊相機所取得之圖檔(四)……… 90 圖 A.8 左邊相機所取得之圖檔(五)……… 90 圖 A.9 右邊相機所取得之圖檔(一)……… 90 圖 A.10 右邊相機所取得之圖檔(二)……… 90 圖 A.11 右邊相機所取得之圖檔(三)……… 91 圖 A.12 右邊相機所取得之圖檔(四)……… 91 圖 A.13 右邊相機所取得之圖檔(五)……… 91
圖 A.14 Load Image……… 91
圖 A.15 Select Region……… 91
圖 A.16 完成畫面……… 91
圖 B.1 設定工作目錄至 D:\a2002\……… 93
圖 B.2 選取『 ObjectARX 2000/2000i/2002 Add-in 』……… 94
圖 B.3 選取『 Include files 』……… 95 圖 B.4 選取『 Library files 』……… 95 圖 B.5 設定 ObjectARX 2002 控制檔輸出路徑……… 96 圖 B.6 主程式介面……… 98 圖 B.7 對位區介面圖……… 99 圖 B.8 整合區介面圖……… 101 圖 B.9 其他功能介面圖……… 102
一、緒 論
1.1
研究背景
隨著工業的不斷發展與進步,三維外形量測技術也隨之日益重要與成熟。由 於三維外形量測技術的成熟發展,現今早已被廣泛使用於各種不同的應用,例如: 逆向工程(RE,Reverse Engineering)、工業檢測、電腦視覺,多媒體動畫…等。 尤其以逆向工程對於三維外形量測的依賴性為最高。傳統的產品開發過程:先由 工程師構思產品需求,再來確定產品的功能與機構、規格,進而設計每一個單一 零組件;設計完成後,經過分析,設計修正,直到設計結果合乎產品需求後,接 著進行製造、組裝零組件、性能測試等步驟。以上的開發過程被稱為正向工程。 逆向工程的程序並非從產品需求開始,而是從產品本身開始,由產品本體去回溯 設計資料,並且接著進行分析與改良。所以取得產品三維外形便成為逆向工程相 當重要的一項環節。一旦取得產品三維外形資料,便可使用電腦輔助設計系統 (CAD,Computer Aided Design)建立實體模型,在系統中進行外形之編修後,再 將 修 改 後 的 三 維 外 形 資 料 傳 至 電 腦 輔 助 製 造 系 統 (CAM , Computer Aided Manufacturing)或快速成型機(RP,Rapid Prototyping)進行製造。相較於正向工 程來說,逆向工程有生產速度快,成本低…等優點,不過精確度較低為其缺點。 三維外形量測的方法與理論非常多元化,以量測方式為區分主要可區分為『接 觸式三維外形量測』與『非接觸式三維外形量測』兩種。 接觸式三維外形量測主要是由探針去接觸待量測物體的表面,進而根據探針 的三維位子經由多次的碰觸與紀錄,經過各軸座標位置與實際量測空間座標位置 的轉換,就可取得待測物體之三維點資料,經過處理即可還原待測物體的輪廓。 接觸式量測的優點為精確性及可靠度高;但缺點為量測方式較費時,量測時有損 害物件表面的可能,而且若待測物體為生物(如:人體)或表面過於柔軟的物件時,接觸式量測的使用會更加的受限。相較之下,非接觸式量測利用各種光學原 理作為量測基礎,不僅不需要與待測物體接觸,可以避免很多原先接觸式量測的 限制,還隨著科技的日趨成熟,量測的時間也可以大幅度的縮減;由於以上關係, 非接觸式三維外形量測的技術逐漸取代先前接觸式量測法的系統,成為三維外形 量測系統發展的主流趨勢。 常見的非接觸式三維外形量測方法分別為以下四種:結構光法(structure lighting method) 、 雷 射 掃 瞄 法 (laser scanner method) 、 立 體 視 角 法 (stereoscopy method)與體積交集法(volume intersection method)。
1. 結構光法採取主動式光源,光源由儀器本身投射至物體表面,再以影像 感測器取得投射於物體表面上的光之分佈影像,最後經由演算法重建出 三維點資料。此三維量測法對於投射光源的架設位置需經過精確的調 整,其優點為可以避免尋找特徵點對應(feature point correspondence) 的問題且精確度較高,不過不同圖案的結構光(圖 1.1)所能應用的待測 物體大小會有所不同[1]。
(a)Random speckle pattern (b)Colored dots pattern
(c)Color grid pattern (d)De Bruijn pattern
圖 1.1 不同圖案之結構光示意圖[1][2] 2. 雷射掃描法的原理,為投射點雷射光或者線雷射光於待測物體表面,利 用影像感測器擷取因輪廓起伏而變形的雷射光形變影像,形變影像經過 運算進而求得雷射光點或雷射光線上之輪廓分佈。藉由改變功率來調整 雷射點或線的大小,便可以提高量測精度,為此量測法的最大優點;但 量測速度緩慢,且容易受到環境光線的干擾;且此量測法應用於取得人 體之三維外形圖像時,其必須投射雷射光於人體之流程會有對人體傷害 之疑慮,為其應用於人體三維外形取像之最大缺點。 3. 立體視角法基於使用被動式光源之原理,擷取物體表面在自然光線下的 反射光,不需投射主動式的光源為此三維外形量測方法最大的優點;但 必須解決特徵點對應的問題;此外當物體為均勻表面時,量測法將無法
使用。
4. 體積交集法以物體投影至二維平面的輪廓線來運算出該物體之三維形 狀,不需尋找對應之特徵點,只要物體表面的點出現在某個物體輪廓上, 即可利用投射線的交集去計算實體輪廓。主要缺點為物品凹陷表面有時 無法表現於輪廓線上,容易有量測死角。
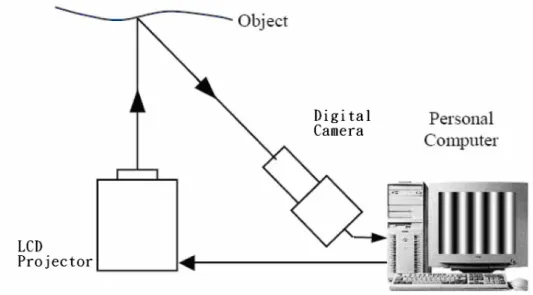
而 條 紋 投 射 法 (fringe projection method) 為 依 據 相 位 移 干 涉 法 (phase-shifting interferometry)所發展而成的三維非接觸量測方法。相位移干 涉法主要是量測待測物體表面光之波前相位(wavefront phase),再比較其與參考 光線之相位差,利用感測器記錄的光強度(intensity)資料,計算出對應相位值; 具有高精確度以及處理過程簡單的優點。 與其他主流非接觸三維量測方法最大的差異在於條紋投射法並沒有固定的硬 體配置,對於各種不同類型的待測物體有著很高的適應性。投射亮度值為週期性 的彩色條紋結構光於待測物體表面,利用影像感測器擷取隨著輪廓高低起伏而有 著對應條紋變形的條紋影像,分別讀取每一個位置其條紋光強度變化並且計算其 相位分佈(phase distribution),藉由以上步驟求得待測物體之三維外形。 條紋投射法之相位分佈,通常是使用相位移法(phase-shifting method)或者 傅立葉轉換分析(Fourier transformation analysis)兩種方法擇其一求得,再從 相位移分佈重建出輪廓高度。傳統的條紋投射法利用白色光光源置於光柵幻燈片 (grating slide)後方,並且藉由配合平移機構的帶動,產生具週期性與相位移 (phase shift)之弦波強度(sinusoidal intensity)條紋結構光,主要限制為弦波 光柵製作較為困難,條紋特性不容易改變;或者是光源互相干涉產生條紋結構光, 並改變光源相位使條紋產生相位移,但卻有光源不穩定及位移量不精確等缺點。 為了克服上述問題,便發展出了「數位條紋投射法(digital fringe projection)」
圖 1.2 數位條紋投射法量測方式示意圖[3]
數位條紋投射法主要是以投影機(projector)作為主動式的投射光源,例如 LCD(liquid crystal display)或 DLP (digital light processing)投影機等,
必須先於電腦中設計好條紋結構光的圖案、週期及相位移量(圖 1.3),即可透過 投影機將條紋圖案投射於待測物表面。此方式不僅方便改變條紋特性,投射出的 條紋光亦擁有快速且精準之相位移,且條紋光的強度對於周遭環境的變化也較不 敏感。 (a)黑白條紋結構光 (b) 彩色條紋結構光 圖 1.3 條紋結構光
1.2
文獻回顧
架設一台數位相機作為影像感測器即可使用數位條紋投射法來進行三維外形 非接觸式量測,取得該物體單一視角之三維形狀。不過使用單一相機來進行三維 外形量測的動作,所取得之三維點資料有以下缺點: 1. 對於大型或者形狀不甚圓滑、規則之待測物體會因為遮蔽緣故,無法取得 該視角完整正確之三維外形資料。 2. 單一相機能取得的三維外形點資料角度有所限制(必定小於一百八十度, 依取相技術成熟與否有所不同),而且誤差往往與取相角度的偏差程度有 著相當的關係,在取相角度範圍的邊緣常常會因為計算誤差放大或者資料 失真而出現三維外形點資料破裂的情況。 故使用條紋投射法進行三維外形量測時,本研究架設一台以上的數位相機, 以不同的固定視角,來進行數位條紋投射法的三維外形量測以確保物體的三維外 形點資料最接近待測物體的實際原貌。 以多台相機進行條紋投射法擷取條紋結構光的影像後,分別將各個固定視角 的影像進行三維外形點資料的重建,如此會產生多筆的三維點資料;為了將多組 的三維點資料經過分析、運算、整合成一組點資料,必須進行三維點資料對位(Data registration)與三維點資料整合(Data integration)。 各組的掃描點資料都有各自的座標系統,故需要統整各組點資料之座標系 統,將各組點資料都置於單一的座標系統內;此種步驟稱之為三維點資料對位。 對位完畢之後,將重疊的資料去除,並將接合處進行接合混成,重新排序成一組 點資料,此步驟稱為三維點資料整合。以下將針對『三維點資料對位』、以及『三 維點資料整合』兩部分來整理並回顧相關文獻。1.2.1 三維點資料對位回顧
要進行點資料對位與點資料整合,多組三維點資料之間必須符合與滿足以下 三個條件: 1. 各組三維點資料,必須來自不同的視角。最容易達成此目的的方法為將待 測物件置於一旋轉盤上,藉由旋轉運動讓單一固定相機取得不同視角之影 像。 2. 各 組 三 維 點 資 料 所 處 的 相 對 與 絕 對 座 標 必 須 被 定 義 對 位 ( be registered)。如此方可去尋找其不同座標系統間的轉換矩陣。 3. 經 過 整 合 後 之 三 維 點 資 料 檔 , 必 須 是 一 個 沒 有 多 餘 部 分 的 模 型 (non-redundant model)。 三維點資料對位的方式主要可分為以點資料的特徵(Characteristic)進行對 位與以校正樣本(Calibration sample)進行對位,針對不同的情況使用不同的對 位方法。點資料的特徵對位示意圖,如圖 1.4 所示。校正樣本對位的示意圖,如 圖 1.5 所示。(a)兩組三維點資料 (b)分別選取對應之特徵點 (c)依據特徵點完成對位 圖 1.4 特徵對位示意圖[19] 圖 1.5 校正樣本將兩個座標系統轉換單一座標系統示意圖[20] 點資料特徵對位是以量測三維點資料的幾何特徵作為對位的依據,常用的幾 何特徵為斜率(Slope)與曲率(Curvature),也有許多學者自訂幾何特徵以增加對
位準確度與處理速度,如 Chua 等人[4]、Benjemaa 等人[5]、Hügli 等人[6]、Schütz 等人[7]皆有此方面的研究;Chua 的特徵點搜尋方式示意圖,如圖 1.6、圖 1.7 所示。 (a)固定半徑之輪廓線 (b)參考方位 (c)特徵距離與轉換平面的角度關係 圖 1.6 Chua 自訂之幾何特徵示意圖[4]
(a) peak (b) ridge (c) saddle
(d) pit (e) valley (f) roof edge
圖 1.7 各種特徵點的分析圖[4] 定義幾何特徵後,找出幾何特徵較為特別的點作為特徵點,並進行相關度分 析找出特徵點在其他組點資料對應的點,將其紀錄為特徵點,由特徵點計算出座 標轉換的矩陣,座標轉換的公式為: T RQ P= + (1.2.1) Q:原始點資料,P:經過座標轉換矩陣轉換後之點資料 R:旋轉矩陣,T:位移矩陣
一般計算座標轉換矩陣的步驟可分為初始對位(Initial registration)與精 確對位(Fine registration)。
初始對位常用 SVD(Singular Value Decomposition)演算法計算矩陣,使用 數學上的奇異值分解計算旋轉矩陣(Rotation matrix)與位移矩陣(Translation matrix),學者如 Arun 等人[8]、Yau 等人[9]皆進行此演算法的研究。
精確對位一般以 ICP(Iterative Closest Point)演算法進行之,如圖 1.8 所 示,原理為使用資料點中最接近的點作為對應點,接著反覆地計算與套用座標轉 換矩陣,由此慢慢地將資料點移動到相同的座標值,研究的學者有 Besl 等人 [10]、Masuda 等人[11]、Rusinkiewicz 等人[12]。經由上述的過程可完成資料點 特徵對位。 圖 1.8 ICP 演算法示意圖[19] 校正樣本對位是以校正樣本的特徵作為對位的依據,特徵的需求為具有幾何 形狀簡單且容易辨識的特點,如此才能夠方便地挑選出校正樣本中的特徵。學者 們使用各種物體作為校正樣本,Zagorchev 等人[13]使用校正框架,如圖 1.9 所 示,Parasnis[14]使用校正塊,如圖 1.10 所示,Hebert[15]使用十字記號圖樣 , 如圖 1.11 所示,Niem 等人[16]使用線圖樣,如圖 1.12 所示,Sitnik 等人[17]、 Chen 等人[18]使用矩形圖樣,如圖 1.13、圖 1.14 所示。
圖 1.9 校正框架[13] 圖 1.10 校正塊[14]
圖 1.13 Sitnik 矩形圖樣[17] 圖 1.14 Chen 矩形圖樣[18] 決定校正樣本後,以相機拍攝樣本的影像,接著必須選取樣本中的特徵點, 為了達到自動選取特徵的需求,常用影像二值化(Image binarization)的處理方 式讓影像中的特徵點變得明顯。挑選特徵點之後,搜尋特徵點對應到的空間三維 座標,由此計算座標轉換的矩陣。計算矩陣的方法,一般採取最小平方法計算之, 以多組的特徵點計算出最準確的矩陣元素。 點資料特徵對位的優點在於操作步驟簡單、流程較為自動化,對位全程皆可 交給電腦運算,但缺點在於特徵點比對所需的運算時間長、量測準確度不足與各 組點資料點重合部份過少時對位容易失敗,適合準確度佳與無法進行校正樣本對 位的量測系統使用。一般來說,多台相機的量測系統使用校正樣本方法來解決對 位問題的案例較多,儘管校正過程所需人工步驟較多,但電腦運算所需的時間較 短且不受限於準確度。
1.2.2 三維點資料整合回顧
將各組點資料對位完畢後,接著必須進行點資料整合。點資料整合的方式主要可分為掃描線(Scan line)為基礎與網格(Mesh)為基礎的方式,研究掃描線為基 礎的學者有 Masuda 等人[21]、Lai 等人[22],研究網格為基礎的學者有 Yau 等人 [9]、Soucy 等人[23]、Turk 等人[24]。 掃描線一般為水平方向組成的點結構,通常由數十到數百個點組成。網格一 般為三角形組成的點結構,由三個點組成。掃描線為基礎的方法優點在於處理方 式簡單,電腦運算所需的時間較短,缺點為因點資料的處理單位較大,對於整合 的效果較不穩定。與網格為基礎的方式相比較,若各組點資料的掃描線結構差異 較大,則整合的效果較差,反之則整合的效果差不多。網格為基礎的優點則是因 點資料的處理單位較小,對於整合的效果較穩當,缺點則是需要耗費較多的時間。 因為本研究背景使用兩台數位相機作為影像擷取器,故兩邊點資料的掃描線結構 差異不大,且考量到資料處理的效率,故選擇以掃描線為基礎的方式進行資料點 整合。以下為以掃瞄線為基礎的點資料整合方式[21]: 1. 首先將兩筆資料點分別定義為來源點資料 (Source)與目的點資料 (Destination)。 2. 以來源點資料的掃描線架構為主,將目的點資料嵌入來源資料點的掃 描線架構,依照掃描線的儲存方向設定點資料為來源點資料或目的點 資料。由於本研究的掃描線儲存方向為由左向右,故設定左邊的點資 料為來源點資料,右邊的點資料為目的點資料,如圖 1.15 所示。 圖 1.15 兩組點資料設定示意圖[21]
3. 定義兩組點資料的屬性後,接著找出兩組點資料中各掃描線的交界點 (Intersection point),交界點定義為最接近兩組點資料的掃描線相 交處之點。圖 1.16 為兩組點資料之掃描線與交界點示意圖。 圖 1.16 兩組點資料之掃描線與交界點示意圖[21] 4. 交界點的搜尋方式為在兩組點資料的同編號掃描線中,找出點距離最 近的點對(Point-pair),並規定點對中的兩點,目的點資料的 x 軸座 標必須大於來源點資料的 x 軸座標,如此才不會出現排序混亂的情 況。為了加速搜尋速度與確保搜尋結果為正確,通常會設定一個搜尋 範圍,在此範圍內定義點對出現的位置。這裡以來源資料點為基準, 設定其搜尋範圍,定義搜尋範圍起始比率(Rst)與搜尋範圍結束比率 (Red),此比率為點編號與掃描線總點數之比,也就是說點對出現的 位置在(起始比率×掃描線之總點數)至(結束比率×掃描線之總點數) 間。一般設定起始比率為 0.47,結束比率為 0.53。 5. 找出點對後,將此兩點分別定義為來源資料點與目的資料點的交界 點,接著進行資料點混成(Blending)的步驟,由此步驟能夠將兩筆資 料點平滑地接合。 6. 首先必須定義出兩組點資料的點資料對應,這裡使用前面定義過的交
界點作為點資料對應的標準,兩組點資料的交界點擁有相同的點編 號,之後再依排列順序定義其他點的點編號。 7. 接著定義出混成點數目 Nblend,判別以幾個點進行混成的處理,一般 設定 Nblend 為 15。圖 1.17 為進行混成的點資料示意圖,其中 S 為i 來源點資料中進行混成的點, D 為目的點資料中進行混成的點,ii 為點編號,這裡使用 9 個點進行混成,則 i=0,1,...,8。為了能讓點 資料混成的效果較佳,故設定以交界點為混成點中的中心點,如此可 讓混成的結果能夠平均地從左右兩邊的點資料取樣之。 圖 1.17 進行混成的資料點示意圖[21] 8. 點資料混成一般可分為線性混成與二次混成,其公式分別如式(1.2.2) 與式(1.2.3)所示,其中 B 為混成出的點資料。 i 1 ,..., 2 , 1 , 0 − = Nblend i ) 1 /( ) ) 1 (( − − × + × − = blend i i blend i N i S i D N B (1.2.2) ] ) 1 /[( ] ) 1 [(N i 2 S i2 D N i 2 i2 Bi = blend − − × i+ × i blend − − + (1.2.3) 9. 使用線性混成(Linear blending)得到的結果較不平滑,故本論文選擇 使用二次混成(Quadratic blending)進行混成。線性混成與二次混成 之結果比較如圖 1.18 所示。
(a) 使用線性混成 (b) 使用二次混成 圖 1.18 線性混成與二次混成之結果比較[19] 10. 經過點資料混成的步驟後,刪除位於混成點之前的目的點資料以及位 於混成點之後的來源點資料,再將目的點資料嵌入來源點資料的線架 構,則來源點資料即為兩組點資料經過點資料整合後產生一組新的點 資料。 圖 1.19 為整個整合流程之示意圖。 (a)使用簡單平均值來整合 (b)使用權重平均值來整合 圖 1.19 整合示意圖[21]
1.3
研究動機與目的
日前與長庚醫院兒童部進行醫學工程合作的發展與研究,將數位條紋投射法 應用在嬰兒畸形頭型矯正之嬰兒頭型的取得,與漏斗胸(Funnel Chest)兒童病 患手術前後胸腔形狀改善的比對上面。 圖 1.20 為各種嬰兒頭型異常之案例[25],醫療行為的步驟依序為:取得嬰兒 頭型、製作適合個別頭型之頭型矯正帽,在需要壓迫生長的地方予以施加壓力, 需要加速生長的地方將矯正帽該區塊進行挖空的動作,以利嬰兒頭型在該區塊之 生長。 圖 1.20 嬰兒頭型異常資料照片[25]圖 1.21 與圖 1.22 為醫院原先使用取得嬰兒頭型的方法,用石膏在嬰兒頭型 上直接進行接觸打模,藉以此步驟取得該個案嬰兒頭型,待石膏定形之後所呈現 之頭型模型如圖 1.22 所示。 圖 1.21 頭盔製作過程 打模[25] 圖 1.22 頭盔製作過程 打模[25] 打模完成後,將石膏填入模內,即便完成了與嬰兒頭型相似之一石膏頭型模 型,灌製石膏模過程如圖 1.23 與圖 1.24 所示。
圖 1.23 頭盔製作過程 灌製石膏模[25]
圖 1.24 頭盔製作過程 灌製石膏模[25]
圖 1.25 頭盔製作過程 矯正帽完成[25] 但由於因為嬰兒自制能力較為薄弱,即使數位條紋投射法取相時間目前已經 縮短至二十秒以內,但嬰兒依舊沒有辦法維持二十秒的時間靜止不動,故此技術 目前除非再縮短取相的時間,否則無法直接應用於嬰兒頭型的取得上面;但是對 於已經取得並且製成石膏像之嬰兒頭型模型,則可以進行取相存檔的動作,可於 矯正後期比較矯正前後的成果差異與比較矯正後跟正常嬰兒頭型的差異性。 漏斗胸(Funnel chest)的兒童病患由於自制力已到達一定的水準,除了手術 後立即取相會因為疼痛而造成的晃動以致取相偶爾失敗之外,基本上以數位條紋 投射法來取得漏斗胸兒童病患的胸部三維外形點資料不會有太大的困難或者誤 差,可以藉由此三維外形點資料以比較手術前、手術後、與手術後多日已康復之 醫療行為改善情況。圖 1.26 與圖 1.27 為漏斗胸兒童病患案例。
(a)傳統手術失敗後,漏斗胸復發 (b)微創手術後兩個月,疤痕在兩側
(c)手術前 (d)手術後兩個月
(a)傳統手術成功者, 仍有大疤痕(男生) (b)傳統手術成功者, 仍有大疤痕(女生) 圖 1.27 漏斗胸兒童病患傳統手術案例[26] 由上述兩個案例可看出,此套系統幾乎已能為醫院所接受並且使用;不過目 前由於對位與整合的技術尚未成熟,一切都是藉由緩慢複雜的手動程序完成整合 與對位;對於非理工背景的人要操作使用數位條紋投射法理論建構出來的設備過 於困難;另一方面,於市面上具有三維點資料對位與整合之電腦輔助設計系統價 格接過於昂貴而且並非能適用於分析處理研究室儀器取得之三維點資料,故期望 本研究能發展出一套數位條紋投射法取得之三維外形點資料的對位與整合軟體, 並且配合簡單操作的介面。
1.4
研究方法
本論文研究方法流程可用圖 1.28 表示之。圖 1.28 本論文之研究方法流程圖
流程之步驟詳述如下:
1. 投射一張或多張之數位彩色條紋圖樣至物體表面。 2. 使用相機拍攝投射於物體表面之彩色條紋圖樣。
3. 使用軟體 Color Fringe Projection System 進行各項運算,其中包含讀取影 像中的像素質、以相位移法將相位求出、對求出的相位進行相位補償、進行
相位重建等等。最終將連續的相位值轉換成三維座標,儲存為三維點資料檔。 4. 將儲存之三維點資料檔讀取並於 CAD 軟體中繪出。 5. 於繪出之圖像上,點選三維對位所需之特徵點,並且透過計算求得對位之特 徵頂點。 6. 進行三維點資料之對位運算。 7. 將三維對位完成之三維點資料進行重新佈點。 8. 將重新佈點後之平面透過混成計算,還原其高度值。 9. 將其完成對位與整合之三維點資料進行網格化鋪面。 經由上述的步驟,只需要兩台相機,一台投影機,與一台電腦即可獲得物體 之三維資訊,並且透過本研究的處理,將兩組三維資訊因應各種情況做不同計算 的接合,使得三維外形能最清晰正確的被表達。
二、三維點資料處理與應用之基本理論
本章說明本論文所使用之三維點資料處理與應用之基本理論,首先說明於一堆隨 機三維點資料中,如何使用最小平方法尋找其最合適之平面,使得所有隨機三維點資 料到該平面之距離總和為最小值。接著介紹於一堆隨機三維點資料中,如何找出其最 合適之拋物面,使得所有隨機三維點資料到該拋物面之距離總和為最小值。最後介紹 如何於座標系統轉換中,計算出可達到各種目的之座標系統轉換矩陣。 三維點資料之各種對位與整合理論各有特色與應用限制,本研究針對數位彩色條 紋投射法之資料結構特性選取各方理論進行整合,期望透過各種理論之整合與程式建 立,可發展出一套最適用於數位彩色條紋投射法所求得之三維外形點資料處理與應用 軟體。2.1 使用最小平方法尋找最適合的平面
首先要找出一個合適的平面,所有特徵點到該平面之距離為最小值;則該平 面之法向量(normal vector)為特徵點資料集合之特徵方向。使用最小平方法 (Least squares fitting)尋找最適合的平面[27][28][29][30][31][32][33] 是為了找出特徵點資料集合的特徵方向。 k i pi,1≤ ≤ points of set a Given 定義一個平面,經過xr0,其法線向量為ar,則其平面公式為: 0 0 ) ( − 0 = → ⋅ = ⋅ 0 = → − = ⋅ x x a x a x c a x c ar r r r r r r rTr (2.1.1) 1 with arTar =c p a Ei = rTri − (2.1.2) c 2 1 ) ( 2 1 ] 2 ) ( [ 2 1 ) 2 ( 2 1 )] )( [( 2 1 ) ( 2 1 ) , ( let 2 1 1 2 1 1 2 1 1 2 1 2 + − = + − = + − = − − = − = =
∑
∑
∑
∑
∑
∑
∑
= = = = = = = p a c a p p a kc p a c a p p a k c p a c a p p a k c p a c p a k c p a k E c a f T k i T i i T k i i T k i T i i T k i i T T i i T k i i T i T k i i T k i i r r r r r r r r r r r r r r r r r r r r r r r r r (2.1.3)∑
= = k i i p k p 1 1 where r r 解決此最佳化問題 0 1 subject to min. c 2 1 ) ( 2 1 ) , ( such that , Find 2 1 = − → + − =∑
= a a p a c a p p a c a f c a T T k i T i i T r r r r r r r r r r (2.1.4)上述之最佳化問題可用 Lagrange Multipliers Method 求得理論解,其求解過程 先假設 Lagrange 函數: ) 1 ( 2 1 ) , ( ) , , ( DefineL ar c λ = f ar c + λ −arTar (2.1.5) 0 ) , ( 3 , 2 , 1 , 0 ) , ( 3 , 2 , 1 , 0 − = ∂ ∂ → = = − ∂ ∂ → = = ∂ ∂ a a c a f i a a c a f i a L i i i r r r r λ λ (2.1.6) p c a p p k a c a f k i i T i r r r r r r − = ∂ ∂
∑
= ) 1 ( ) , ( 1 (2.1.7) c p a c p a c c a f c L = →− T + = → T = ∂ ∂ → = ∂ ∂ r r r r r 0 0 ) , ( 0 (2.1.8) 將公式(2.1.7)、(2.1.8)帶入公式(2.1.6),可得:0 ) 1 ( 1 = − −
∑
= a a p p a p p k T k i i T i r r r r r r r λ (2.1.9) a a M a a p p p p k T k i i T i r r r r r r r r − =λ → =λ∑
= ] [ ] ) 1 [( 1 (2.1.10) T k i i T i p pp p k M =∑
r r − rr = ) 1 ( ] [ 1 (2.1.11) 由公式(2.1.9)可得: a p c a a p p a p p k T k i i T i r r r r r r r r r = +λ = +λ∑
= ) 1 ( 1 (2.1.12) 利用公式(2.1.8)、(2.1.12)可將公式(2.1.3)整理如下: λ λ λ λ 2 1 2 1 2 1 2 1 2 1 2 1 2 1 c 2 1 ) ( 2 1 c 2 1 ) ( 2 1 ) , ( 2 2 2 2 2 2 1 = + − + = + − + = + − + = + − =∑
= c c c c p a c p a c a a p a c p c a a p a c a p p a c a f T T T T T T k i T i i T r r r r r r r r r r r r r r r r r r (2.1.13) 由公式(2.1.4)( 2.1.10)( 2.1.13)可知最佳化問題之解為[M]矩陣之最小特徵值 之特徵向量,該特徵向量即為所求平面之法向量。2.2 尋找一個最適合多點三維點資料之拋物面
尋找出一個拋物面(Paraboloid),三維點資料樣本到該拋物面的距離為最小 值。 給一組三維點資料樣本 m i i i i y z x, , )} 1 {( = ,並且假設其確實位於拋物面上。) , ( ) , (x y p1x2 p2xy p3y2 p4x p5y p6 P Q x y f z= = + + + + + = r⋅ r (2.2.1) ) 1 , , , , , ( and ) , , , , , ( where 2 2 6 5 4 3 2 1 y x y xy x Q p p p p p p P = = r r 找出 Pr讓誤差平方和為最小值: ) , ( where ) ( ) ( 1 2 i i i m i i i y x Q Q z Q P P E r r r r r = − ⋅ =
∑
= (2.2.2) 當 E 的梯度為零的時候,誤差為最小值 0 ) ( 2 1 r r r r = − ⋅ = ∇ →∑
= m i i i i z Q Q P E (2.2.3)∑
∑
= = = → m i i i m i t i iQ P zQ Q 1 1 ) ( r r r r 定義一個 6 × 6 的對稱矩陣∑
= ⋅ = m i t i i Q Q A 1 r r 與一個 6 × 1 的向量∑
= = m i i iQ z B 1 r 線性系統方程式 APr= 之解答 PBr r 即為所求拋物面方程式之係數。 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ →∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = m i i m i i i m i i i m i i i m i i i i m i i i m i m i i m i i m i i m i i i m i i m i i m i i m i i i m i i m i i i m i i i m i i m i i i m i i m i i i m i i i m i i m i i m i i m i i i m i i m i i i m i i i m i i i m i i i m i i i m i i i m i i i m i i i m i i m i i i m i i m i i i m i i i m i i z y z x z y z y x z x z p p p p p p y x y y x x y y y x y y x y x x y x x y x y x x y y y x y y x y x y x y x y x y x y x y x x y x x y x y x x 1 1 1 1 2 1 1 2 6 5 4 3 2 1 1 1 1 1 2 1 1 2 1 1 2 1 1 3 1 2 1 2 1 1 1 2 1 2 1 2 1 3 1 2 1 3 1 2 1 4 1 3 1 2 2 1 1 2 1 2 1 3 1 2 2 1 3 1 2 1 2 1 3 1 2 2 1 3 1 4 1 [29](2.2.4) 求已知拋物面之頂點:6 5 4 2 3 2 2 1 ) , (x y px p xy p y p x p y p f z= = + + + + + 0 2 ) , ( 0 2 ) , ( 5 3 2 4 2 1 = + + = ∂ ∂ = + + = ∂ ∂ p y p x p y y x f p y p x p x y x f (2.2.5) 6 5 4 2 3 2 2 1 2 4 1 2 1 3 2 5 2 4 3 , ) 2 ( , ) 4 ( ) 2 ( p y p x p y p xy p x p z p p p y p p p p p p p p x =− + = + + + + + − − = → (2.2.6)
2.3 座標轉換矩陣(transformation matrix)
於各種座標系統中的轉換可以透過簡單的矩陣運算達到其目的,本研究使用 的座標轉換矩陣可分為三種:1、平移(translation);2、旋轉(rotation);3、 映像(mapping)[34][35][36]。2.3.1 平移
當一個物件要在 x,y,和 z 方向分別的被平移 a,b,和 c,從他的初始位置模型 座標系統轉至世界座標系統的時候,於世界座標系統中他會有一個新的位置,新 位置座標 (Xw,Yw,Zw) 會有以下的關係: c Z Z b Y Y a X X m w m w m w + = + = + = (2.3.1) 其中 Xm,Ym,Zm 乃是在模型座標系統中的相同點位置使用矩陣形式,公式(2.3.1)可以表示成下列形式: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⇒ 1 1 0 0 0 1 0 0 0 1 0 0 0 1 1 ) , , ( m m m w w w Z Y X c b a Z Y X c b a Trans [34](2.3.2)
2.3.2 旋轉
假設一個物件要對於其模型座標系統之 x 軸選轉角度 θ 至世界座標系統 中,從原始座標系統中的 (Xm,Ym,Zm) 轉至世界座標系統中的 (Xw,Yw,Zw)。 ) , , (Xw Yw Zw 與 (Xm,Ym,Zm) 之間的關係可以用以下公式簡單的表示出來: m w X X = (2.3.3) θ θ θ α θ α α θ α θ α θ sin cos sin sin cos cos ) sin sin cos (cos ) cos( m m w Z Y l l l l Y − = − = − = + = (2.3.4) θ θ θ α θ α α θ α θ α θ cos sin cos sin sin cos ) sin cos cos (sin ) sin( m m w Z Y l l l l Z + = + = + = + = (2.3.5) 由公式(2.3.3)、(2.3.4)和(2.3.5)可以表示成矩陣形式如下:⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⇒ 1 1 0 0 0 0 cos sin 0 0 sin cos 0 0 0 0 1 1 ) , ( m m m w w w Z Y X Z Y X x Rot θ θ θ θ θ [34](2.3.6) 同理可得依據 y 軸或者 z 軸旋轉的齊次轉換矩陣可以表示成: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⇒ 1 1 0 0 0 0 cos 0 sin 0 0 1 0 0 sin 0 cos 1 ) , ( m m m w w w Z Y X Z Y X y Rot θ θ θ θ θ [34](2.3.7) ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⇒ 1 1 0 0 0 0 1 0 0 0 0 cos sin 0 0 sin cos 1 ) , ( m m m w w w Z Y X Z Y X z Rot θ θ θ θ θ [34](2.3.8)
2.3.3 映像
假設要將一個依據 x1y1z1 座標系統位置為 (X1,Y1,Z1) 的一點 P,經過計算 轉換成依據 x2y2z2 座標系統位置為(X2,Y2,Z2) 的點,可使用下列座標系統轉換 矩陣: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⇒ − 1 1 0 0 0 1 1 1 1 2 2 2 2 1 Z Y X p a o n p a o n p a o n Z Y X T z z z z y y y y x x x x [34](2.3.9) 其中 px,py,pz 為依據 x2y2z2 座標系統看 x1y1z1 座標系統原點之位置座 標; nx,ny,nz 分別為元素 x2,y2,z2 依據 x2y2z2 座標系統看 x1y1z1 座標系統 x 軸方向之單位向量; o ,o ,o 分別為元素 x ,y ,z 依據 x y z 座標系統看 x1y1z1 座標系統 y 軸方向之單位向量; ax,ay,az 分別為元素 x2,y2,z2 依
三、 三維點資料處理與應用之軟體系統發展
隨著數位條紋投射法發展之日益成熟,為了改進設備取得之便利性與購買設備所 需之經費,Color Fringe Projection System[37] (附錄 A)將以往數位條紋投射法 使用之 DLP 投影機改成 LCD 數位投影機,將 CCD 相機以大眾市場導向之數位相機取代 之,這樣便可以拿掉相機控制裝置與 Unix 系統工作站,直接使用個人電腦進行控制。 Color Fringe Projection System 硬體架設示意圖如圖 3.1 所示。
圖 3.1 Color Fringe Projection System 硬體架設示意圖
以數位條紋投射法擷取待測物體之條紋影像並且使用程式 Color Fringe Projection System 運算取得左右相機視角之三維點資料後,便可使用三維點資料進 行對位與整合等後處理的工作。三維點資料對位可分為三步驟: 一、讀取三維點資料。 二、選取特徵點。 三、進行三點對位。
三維點資料整合可分為三步驟: 一、重新佈點。 二、混成。計算每一點混成之高度值。 三、網格化鋪面。輸出一組三維點資料,並且完成網格化鋪面。 最後可以藉由剖面圖取得的運算來取得待測物體三維外形之剖面圖,得以對物體 之三維外形進行分析與比較。
3.1 讀取三維點資料
分別讀取左右相機視角擷取之三維點資料檔案,其附檔名為".tst";由於 本研究是採用掃瞄線形式作為點資料的儲存格式,故在讀取點資料之時,將同一 條 掃 瞄 線 上 之 所 有 點 資 料 使 用 AutoCAD 2002 之 內 建 指 令 “ 三 維 多 點 連 線 (3dpolyline)"連成一條線。左右相機視角取得之原始石膏像模型如圖 3.2 與 3.3 所示。左右相機視角取得之石膏像模型條紋圖像如圖 3.4 與 3.5 所示。左右相機 視角取得之三維點資料檔案以 3D 掃瞄線圖像形式表現,如圖 3.6~圖 3.9 所示。圖 3.2 左邊相機原始圖像 圖 3.3 右邊相機原始圖像
圖 3.6 左邊視角相機取得之三維點資料 圖 3.7 左邊視角相機取得之三維點資料 圖 3.8 右邊視角相機取得之三維點資料 圖 3.9 右邊視角相機取得之三維點資料
3.2 選取特徵點
選擇方便使用於特徵對位之特徵點。挑選三維圖像中具有強烈特徵之單點三 維點資料;若該特徵點為周遭區域三維外形起伏之頂點,可使用下列方式選得欲 選取之三維頂點特徵點資料。 1. 先點選該特徵頂點附近之任何一點 P,如圖 3.10 所示。 圖 3.10 選取特徵點附近之任何一點 2. 使用距離比較法找出整組三維點資料中距離點 P 最近之 1000~1500 個 點,如圖 3.11 與圖 3.12 所示。圖 3.11 距離選取點最近之 1400 點資料 圖 3.12 距離選取點最近之 1400 點資料 3. 找出一個合適的平面,可以使步驟 2 所取得之距離點 P 最為相近的所有三 維點資料到欲求平面之距離總和為最小值;求得平面之法向量為步驟 2 所取得之所有特徵點資料集合之特徵方向。將其所有特徵點資料帶入矩陣 T k i i T i p pp p k M =
∑
r r − rr = ) 1 ( ] [ 1 之中,並且求解該矩陣之特徵值與特徵向量;選 取最小特徵值之特徵向量即為選取特徵點資料集合之特徵方向其單位向 量。該特徵向量方向與選取特徵點資料集合之關係會如圖 3.13 與圖 3.14 所示。圖 3.13 找出特徵點資料集合 之特徵平面法向量 圖 3.14 找出特徵點資料集合 之特徵平面法向量 4. 根據步驟 3 所求得之單位法向量,利用座標轉換矩陣依序將所有步驟 3 選取之特徵點資料集合從原先位於之世界座標系統 XYZ 中轉換至新定 義的模型座標系統 xyz 中,其中新定義的模型座標系統 xyz 之 z 軸 方向於座標系統 XYZ 中之單位方向向量必須與求得之單位法向量相 同,並且其原點必須位於原先世界座標系統中所有選取之特徵點資料之 ) , , (x y z 平均值上面。 5. 在模型座標系統 xyz 中,使用距離比較法找出距離點 P 最近之 50~250 個點作為拋物面特徵點資料集合,如圖 3.15 與圖 3.16 所示。
圖 3.15 距離選取點最近之 200 點資料 圖 3.16 距離選取點最近之 200 點資料 6. 於模型座標系統 xyz 中,尋找出一個合適的拋物面,使得拋物面特徵點 資料集合內之所有三維點到該拋物面之距離總和為最小值。將所有點依序 帶入方程式(3.2.1)與方程式(3.2.2)中,可求得拋物面未知常數 ) , , , , (p1,p2 p3 p4 p5 p6 。 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = m i i m i i i m i i i m i i i m i i i i m i i i m i m i i m i i m i i m i i i m i i m i i m i i m i i i m i i m i i i m i i i m i i m i i i m i i m i i i m i i i m i i m i i m i i m i i i m i i m i i i m i i i m i i i m i i i m i i i m i i i m i i i m i i i m i i m i i i m i i m i i i m i i i m i i z y z x z y z y x z x z p p p p p p y x y y x x y y y x y y x y x x y x x y x y x x y y y x y y x y x y x y x y x y x y x y x x y x x y x y x x 1 1 1 1 2 1 1 2 6 5 4 3 2 1 1 1 1 1 2 1 1 2 1 1 2 1 1 3 1 2 1 2 1 1 1 2 1 2 1 2 1 3 1 2 1 3 1 2 1 4 1 3 1 2 2 1 1 2 1 2 1 3 1 2 2 1 3 1 2 1 2 1 3 1 2 2 1 3 1 4 1 (3.2.1)⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
= = = = = = − = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = m i i m i i i m i i i m i i i m i i i i m i i i m i m i i m i i m i i m i i i m i i m i i m i i m i i i m i i m i i i m i i i m i i m i i i m i i m i i i m i i i m i i m i i m i i m i i i m i i m i i i m i i i m i i i m i i i m i i i m i i i m i i i m i i i m i i m i i i m i i m i i i m i i i m i i z y z x z y z y x z x z y x y y x x y y y x y y x y x x y x x y x y x x y y y x y y x y x y x y x y x y x y x y x x y x x y x y x x p p p p p p 1 1 1 1 2 1 1 2 1 1 1 1 1 2 1 1 2 1 1 2 1 1 3 1 2 1 2 1 1 1 2 1 2 1 2 1 3 1 2 1 3 1 2 1 4 1 3 1 2 2 1 1 2 1 2 1 3 1 2 2 1 3 1 2 1 2 1 3 1 2 2 1 3 1 4 6 5 4 3 2 1 1 (3.2.2) 7. 求得該拋物面後,於模型座標系統 xyz 中,再求該拋物面在其 z 方向 的極值,並且求得產生極值時該點之三維點資料,此三維點資料即為我們 所要尋找之特徵頂點,如圖 3.17 與圖 3.18 所示。 再透過座標轉換矩陣, 將此特徵頂點從模型座標系統 xyz 中轉回世界座標系統 XYZ 中。 圖 3.17 求得拋物面,並尋找其頂點 圖 3.18 求得拋物面,並尋找其頂點3.3 進行三點對位
三維點資料之對位方式非常多樣化,根據數位條紋投射法取得的三維點資料 特性,於此採用三點對位流程: 1. 定義廣義座標系統 XYZ ,並且分別自選定的兩組點資料 A、B 中,點選 找出特徵對位所需要的三個點 Ar1,Ar2,Ar3 與 Br1,Br2,Br3 。 2. let Pr=B1A1=Ar1−Br1 將所有的 B 組點資料依據 Pr移動,分別於(x,y,z)方 向平移(Px,Py,Pz);此時所有的 B 組點資料依然位於 XYZ 座標系統之 中,並且透過平移的運算使得Ar1、Br1兩點重合。 平移的矩陣為: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 1 0 0 0 1 0 0 0 1 0 0 0 1 z y x P P P 3. 依據ΔA1B2A2所在的平面定義一個新的座標系統 xyz : 2 1 2 1 1 2 1 2 1 2 B B B B n A A A A n = = r r
![圖 1.2 數位條紋投射法量測方式示意圖[3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8504935.185453/24.892.172.789.118.355/圖12數位條紋投射法量測方式示意圖3.webp)
![圖 1.9 校正框架[13] 圖 1.10 校正塊[14]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8504935.185453/31.892.137.743.110.830/圖19校正框架13圖11校正塊14.webp)
![圖 1.13 Sitnik 矩形圖樣[17] 圖 1.14 Chen 矩形圖樣[18] 決定校正樣本後,以相機拍攝樣本的影像,接著必須選取樣本中的特徵點, 為了達到自動選取特徵的需求,常用影像二值化(Image binarization)的處理方 式讓影像中的特徵點變得明顯。挑選特徵點之後,搜尋特徵點對應到的空間三維 座標,由此計算座標轉換的矩陣。計算矩陣的方法,一般採取最小平方法計算之, 以多組的特徵點計算出最準確的矩陣元素。 點資料特徵對位的優點在於操作步驟簡單、流程較為自動化,對位全程皆可 交給](https://thumb-ap.123doks.com/thumbv2/9libinfo/8504935.185453/32.892.158.508.108.423/三維座標由此計算座標轉換矩陣計算矩陣方法一般採取最小法計交給.webp)
![圖 1.24 頭盔製作過程 灌製石膏模[25]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8504935.185453/39.892.114.736.424.684/圖124頭盔製作過程灌製石膏模25.webp)
![圖 1.26 漏斗胸兒童病患微創手術案例[26]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8504935.185453/41.892.115.732.160.480/圖126漏斗胸兒童病患微創手術案例26.webp)