2006IEEEInternational Conferenceon
Systems, Man, andCybernetics October8-11,
2006,
Taipei, TaiwanControl Design for
Vehicle's Lateral
Dynamics
Der-Cheng Liaw and Wen-Ching Chung
Abstract-issuesofcontrollability and stabilization design forvehicle's lateral dynamics are presented. Based on the
assumption ofconstantdrivingspeed,asecond-order nonlinear
lateral dynamical model is obtained. It is observedthatsaddle
nodebifurcation will appear in vehicledynamicswith respectto
the variation of the front wheel steering angle, which might
result in spin and/or system instability. In order to possibly
prevent the occurrenceof suchaninstability,thecontrollability
of vehicle dynamics at the saddle node bifurcation point is
discussed. This leads to the design ofa direct state feedback
control law for systemstabilization.Two-Parameterbifurcation
analysis of system behavior is also obtained to classify the
regime of the effective control gains for system stabilization.
Numerical simulations foran example model demonstrate the
effectiveness ofanalyticalresults. I. INTRODUCTION
ecently,thestudyof thevehicle'sdynamicshasattracted onsiderableattention [1]-[6].Oneofthemajor goalsof thosestudiesistoenhancethedriving safetysince there have huge amountoftraffic accidentsoccurring indaily life. Itis knownthat thosetraffic accidentsarehighlyrelatedwith the nonlinear behaviorofvehicledynamics.Thelinkagebetween the nonlinearphenomenaofvehicledynamics andthe
applied
frontwheel steering anglehence becomesa veryimportant issue. Amongthoseexisting studies, slidingmodeapproach has been used to design robust control laws for providing systemstabilitywith respecttothelarge variation of system parameterssuchasaxialvelocity,massofthevehicleand thecontact force between tire and road surface [2]. A five degree-of-freedom vehicle modelwasused in[6]todesignan
extended Kalmanfilter(EKF) forestimatingthehistoricdata ofvehicle'smotionandcorrespondingtire forces.Basedon a
linearmodel ofvehicle's lateraldynamics,linearcontrol laws have been proposed in [3, 4]. Saddle-node bifurcation was
observed in vehicle dynamics [5] to link with system instability via a numerical example. Such a bifurcation phenomenon might result inspinof the vehicle.
Bifurcation theory and itsapplicationshave beenrecently wellexploited[7]-[11]. Byapplyingthebifurcation theory, a theoreticalanalysisof vehicledynamicshas beenobtained by Liawetal[12], whichrevealedthat theuncontrolledmodel of
Manuscriptreceived March 15, 2006. This workwassupportedinpartby theMinistryofEducation,Taiwan,R.O.C. under Grant EX-9 1 -E-FA06-4-4.
Der-Chemg Liaw, Corresponding author, Professor, Department of
Electrical and Control Engineering, National Chiao Tung University, Hsinchu 300, Taiwan, R.O.C. (phone: +886-3-5712121-54363; fax:
+886-3-5715998;e-mail:[email protected]).
Wen-Ching Chung, Ph.D. Candidate, Department of Electrical and
Control Engineering,National ChiaoTungUniversity,Hsinchu300,Taiwan, R.O.C.
vehicle's lateral dynamics might undergo stationary saddle nodebifurcation.
In this paper, we continue the study of vehicle's lateral dynamicsasthat in [12] butfocusonthe control issue. Here, weconsiderthe nonlinear model ofvehicle'slateraldynamics byassumingconstantvelocityinmotion equationsof steering dynamics withoutconsideringroll motion. In order to find the existence conditions of stabilization controller, system controllability at saddle node bifurcation point will be
first
discussed. Feedback control design will thenbe studied for preventing or delaying the appearance of saddle node bifurcation.Thepaper isorganizedasfollows.Mathematical models of vehicle system arerecalledinSection
II.
Itisfollowed by the analysis of existence and stability conditions for system equilibrium. The study ofcontrollability atthe saddlenode bifurcationpoint and direct state feedback control design is given in Section IV. Finally,numericalstudies for an example carmodelaregiveninSectionVtodemonstrate theanalytical results.II. VEHICLE DYNAMICS
In the following, we recall the mathematical model for vehicle'ssteeringdynamicsfrom
[1],
which will beemployed inthe paper.Consider the vehicle's steeringdynamicsasdepictedinFig. 1(e.g.,
[1],
[12]). Letboth sideslipangle,dand
yaw rate y be system outputs for the steering characteristics and the front-wheel angleSf
be only system input. In addition,Lf
denote the length between the center of gravity (CG) and front-wheel axes andLr
denote the length between CG and rear-wheel axes, respectively. Moreover,Fyfl
andFyri
(resp.Fyfr
andFyrr)
aretheleft-side (resp.right-side)comering force offronttires andreartires,and bothFxfland FXfr (resp. FXfrandFxrr)
are the left-side (resp. right-side) traction force of front andreartires. Forsimplicity andwithout loss ofgenerality, here, we assume the vehicle body is symmetric about the longitudinalplane. LetFyf
=Fyfl
+Fyjr,
Fyr=Fyrl
+Fyrr,
FXj=Ffl
+Fxfr
andFxr
=Flri
+Fxrr.
Thebasic motion equations forsteeringdynamicswith roll motionneglected was derived in
[1]
asgiven bym(v
v,3r)
=F +\,
Fy,
sinS1,'
(1)mv (,B+
r)
=Fyf
+Fyr
+ fsin'if
, (2)(3)
Iz=
(LFy
-LrFyr)
cos/8+LjFIf
sin1f,
where
m:themassof thevehicle,
I,:
theyawmomentaroundz-axis,v:thelongitudinal velocity.
Fig. 1. Vehicle's steering dynamics.
In this study, we focus on the characteristic analysis of lateral dynamics by assuming
Ff
= 0 and there are noaccelerationordecelerationonthevehiclealonglongitudinal direction, i.e., =0 . Thus, Eq. (1) can be neglected for
analysis.Thesteering dynamicsforconstantspeedv canthen be reducedto asecond-order modelasgiven by
/-4(13,y,
j)
-vIF,
+Fy,.
}-y, (4)Yf2(A/3V4)
I1
{LfF1§
L,F
}cos/,
(5) wherebothFyf
andFyr areknown functions of /1, r andf.
III. STABILITY ANALYSIS
Inthissection,weadopt the second-order modelasinEqs. (4)-(5) to study the local stability for the vehicle's steering dynamics. Denote x
=(,80,y0°)T
an equilibrium point ofsystem(4)-(5)foragiven steeringwheelangle
3f
=fj°.
Bythe definition ofequilibrium point,wethen have
Fyf(
,0y
00f)+
(Po,
70,sf
a=y°mv
(6)
and L
Fyf
(0,
70,
f)-LF,,(,B°0,y0,Sf
0)=0
(7)
or
cos,0
=0.(8)
Tocheck thecondition ofEq.(8),wehave /30 nir+ % for
n=0, 1, 2,... It is clear that avehicle can not
easily
achieve such acondition. Thus, the equilibrium pointxo
ingeneral shouldsatisfy the conditions of Eqs. (6) and (7).Let
x=(,B,7)T,
x=x-xo
and control inputu= 5 -b°0 .Takingthelinearization ofsystem(4)-(5)at
xo
and5f
=05f°,
wehave x=
Aix
+Bu, where A=[,
a2 and BK]b,
LA a4j b2 with mvK a>7(o)
a2=--
y°,)1,__I
mvayya7 a7 ' a3(Lf-
Lr-)
3° y°,P
f°)-cosfl,
aFaF>0\
a4 I-L (ao)-cos30,pYKl
=-0d2
+ (°/ J)0 ns1)ias1 ( oyoo)and
b2
cs3LfY
LrJ(/3
Y0(i0)
(10) (11) (12) (13) (14) (15) (16)
Byapplying the Routh-Hurwitzstability criterion, we then
have the following stability result.
Lemma 1. The equilibrium point
xo
of system (4)-(5) isasymptotically stable if
a,
+a4 <0 andaa4-
a2a3
>0where
ai's
aregiven in Eqs. (1I )-(14).It is known from the so-called "Magic formula" (e.g.,
[5]-[6]) that both values of
a,
and a4, in general, will be negative. Therefore, the stability condition ofa,
+ a4 <0 isalways satisfied.An example of
ai's
willbe given in SectionV. Thus, the stability condition in Lemma 1 can then be reduced to that the equilibrium point x° ofsystem (4)-(5) will be stable if a1a4
-a2a,
>0 . It is clear fromal
+a4 <0that the linearization system(4)-(5)at x° willnothaveapairofpureimaginary eigenvalues withrespect tothe variation of,. Instead, the systemdynamics might have one zero eigenvalue. This implies that the lateral dynamics of vehicle systemwill notundergoHopfbifurcation but might have chance for the appearance ofstationary bifurcation at some
Q-f=47f
suchthat a1a4-a2a3
0O .The conditions of the appearance of saddle node
bifurcation for system (4)-(5)have been obtained in [12] as
follows.
Lemma 2. The system (4)-(5) will undergo saddle node bifurcation for the equilibrium point
xo
if the following conditions hold:(i)
a,a4= a2a3
witha1
<0 and a4<0 (17) (9) (ii)a4b1
.a,b2
,and2 2
(iii)
a4q,
1 -a3ql2+i--q13-
a2q2,1+aq22 --q23.0,a4 a2
(18) (19)
where qI=
f (
xo°)
q,2
= aA(Xa)
0q,3 a2= (X2,s10), q 2 (X ,sj)
q22- a (x I ) and q23-
aj2
x ,9IV. DESIGNOFSTABILIZATION CONTROL LAWS
Asgiven in Lemma2above,system(4)-(5)couldundergo stationary saddlenodebifurcation,whichmightresult inspin of vehicle. In order to prevent the appearance of such an
instability, in this sectionwe will seek forpossible control laws for system stabilization. First, we will discuss the controllabilityof system(4)-(5). Itis followedbythe design ofcontrollaws forpreventingand/ordelayingtheappearance of saddle nodebifurcation. Detailsaregivenasfollows.
A. ControllabilityAnalysis
First, we check the controllability of system (4)-(5). Denote Cthecontrollability matrix of the linearizedmodelof system(4)-(5)asgivenin(9).Wethen have
c [B AB] (20)
Fbi
ab,
+a2b2
(21)
Lb2
a3b,
+a4b2
The determinant of the controllability matrix C is calculatedas
system stabilization. Let the control input u=K x, where K=[-k, -k2]. Thelinearized model(9)canthenrewritten
as
(24) Thecharacteristic equationof system(24) gives
22+A+h2 =
0,
where
=
klb,
+k2b2
-a, -a4,and h2 =aa4-a2a3+
(a2b2
-a4b,)k,
+(a3b,
-a,b2)k2.
(25) (26) (27) Byapplying theRouth-Hurwitz stabilitycriterion,wethen have the following stabilization result for the equilibrium point x°.
Theorem 1. The equilibrium point
xo
ofsystem (4)-(5) is asymptotically stabilizable if h >0 andk
>0, where h, andh2aregiveninEqs.(26)and(27),respectively.V. CASE STUDY
Itisknown that there are many mathematicalmodelshave beenproposed forcornering forces. In thispaper, weadopt the so-called "Magic formula" from [6] for the models of nonlinearcorneringforces
Fyf
andFy],
respectively, asgiven byFyf
=Df
sin[Cf
tan1{Bf
(l-Ef
)af
+Ef
tan'(Bf
a)}det[C]=
a3b,2
-a2b22+
(a4
-a,) bb2.
(22)Wehavethenextresult.
Lemma 3. The linearized model (9) is controllable at the equilibrium point
xo
if a3ba2b2
+(a4
-a)blb, 0,whereai'
s andbi's
aregiveninEqs. (11)-(16).Next,
we study a special case ofwhichxo
is the saddle nodebifurcation point.From[12] andLemma2inSectionIII,wehave a,a4-a2a3=0 and
a4bj
#a2b2 when thelinearizedmodel is evaluatedatthe saddle nodebifurcationpoint. Eq. (22)canthen berewritten as
det
[C]
=I(a4b,
-a2b2)(alb,
+a2b2)
a2 (23)
The nextresult followsreadilyfrom Lemma 3.
Corollary 1. Thestationarysaddle nodebifurcationpoint
xo
of system(4)-(5)iscontrollableif
a,b,
+a2b2 .0,
whereai's
andbi's
aregiveninEqs.(11)-(16).B. StateFeedback Control Design
As discussedabove, the saddle node bifurcation point of system(4)-(5) is controllable if
a,bj
+a2b2 . 0. This leads tothe possibility of a design ofstate feedback control law for and
Fy7.
=D,sin
C,tan{'B,.(1
-Et.)a,.+E,tan-where
a1f
=,+tan-l
j+fy.cos;-J6f
and
ar
=P-tan
j(-
cos/8
.(28)
-'(Ba,.a)}],
(29)
(30) (31) Here,
Bi,
Ci, Di
and E fori =f
rare constants.af
and ardenote theslipangleof front tire andreartire,respectively.It
is clear from Eqs. (28) and (29) that
(,8A
)T
=(0,
O)T
willmake
Fyf
= Fyr-0 when5f
=0 Thus,xO
=(0,O)T
is anequilibrium pointfor system(4)-(5) for
5f
=0. This agreeswith the natural behavior ofvehicledynamics.
In the following, we provide a case study for the lateral dynamics of vehicle system as given in system (4)-(5). To adoptthe data from
[5],
we choose m = 1500 kg,Iz
3000kg.m2, Lf
= 1.2m, Lr- 1.3m andv= 10-40 m/s. The values ofremaining system parameters are chosen as given in Table
I.
Inthisstudy, the system parametersarechosen to berunningonthe lowfriction roadssothat thevehiclemight be easierto
go intospin.This alsocorrespondstothedriving condition of
I
traveling on a down sloping road at constant velocity with equivalent braking effect at throttle being off [5].
TABLEI
Symbol Highfriction road Lowfrictionroad
Bf,B,. 6.7651, 9.0051 11.275, 18.631
G,CnC 1.3,1.3 1.56,1.56
DI;D;. -6436.8,-5430 -2574.7,-1749.7
Ef, -1.999,-1.7908 -1.999,-1.7908
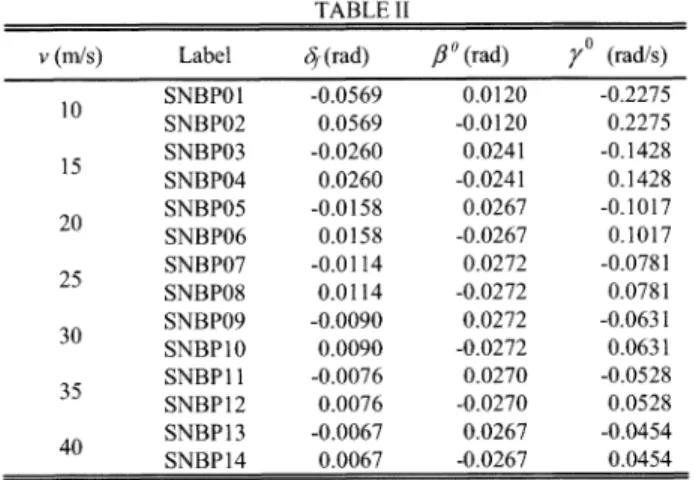
Inthispaper,the computer code AUTO [13] is used to do the numerical analysis, which can calculate system eigenvaluesofJacobianmatrixateachequilibrium pointand determine the corresponding system stability. Bifurcation diagram of system(4)-(5)withrespecttothe variationoft5 is obtained as shown in Fig. 2. Note that, in the bifurcation diagram shown in this paper, the square box denotes the saddle node bifurcationpoint,thesolid-line denotes the stable equilibrium point and the dashed-line denotes unstable equilibrium point, respectively. As shown in Fig. 2, all the system equilibrium points near the origin are found to be asymptoticallystable for differentsettingvalue of thedriving speedv,whichwereboundedbythe saddlenodebifurcation points. Location of those bifurcation points for different setting value of thedrivingspeedv arelisted in TableII. Itis alsoobservedfromFig.2that the systemequilibrium changes stability at the saddle node bifurcation point and the magnitude of
5f
correspondingtothesaddlenodebifurcation becomessmallerasthevelocityvincreases.TABLE II
v(m/s) Label 4(rad) / 0(rad) y (rad/s)
I10
SNBPO1
-0.0569 0.0120-0.2275
SNBPO2
0.0569 -0.0120 0.2275 SNBPO3 -0.0260 0.0241 -0.1428 15 SNBPO4 0.0260 -0.0241 0.1428 20 SNBPO5 -0.0158 0.0267 -0.1017SNBPO6
0.0158 -0.0267 0.1017 SNBPO7 -0.0114 0.0272 -0.0781 25 SNBPO8 0.0114 -0.0272 0.0781 30 SNBPO9 -0.0090 0.0272 -0.0631SNBP1O
0.0090 -0.0272 0.0631 SNBPI1 -0.0076 0.0270 -0.0528 SNBP12 0.0076 -0.0270 0.0528 SNBP13 -0.0067 0.0267 -0.0454 SNBP14 0.0067 -0.0267 0.0454To demonstrate the effectivenessofthe
proposed designs
inSectionIV,weconsiderto constructthe linear control lawsforsystem stabilizationatthetwobifurcation
points
SNBPO1 andSNBP13,respectively.
Detailsaregiven
asfollows.A. ControlDesignfortheEquilibriumPointSNBPO] First,weconsidertodesign state feedback controllers for the low speed driving at v = 10 m/s. To check the
controllability of
SNBPO1,
we havedet[C]
=209.211. 0.Hence, SNBPO1 is controllable. The next result follows readily from Theorem 1 for system stabilizationdesignatthe pointSNBPO1.
Corollary 2. The saddle node bifurcation point SNBPO1 of system (4)-(5) is asymptotically stabilizable by the linear control law if the feedback gains
ki
and k2 satisfy the following two conditions:(i) k2 >-0.2838, (32)
(ii) -2.5276-5.9996k2
<ki
<0.0056+2.9267k2. (33) Asdepicted in Fig. 2, the front-wheel angle6f
will affect the existence of equilibrium points. In order to seek for a better control gains for system stabilization, letk,
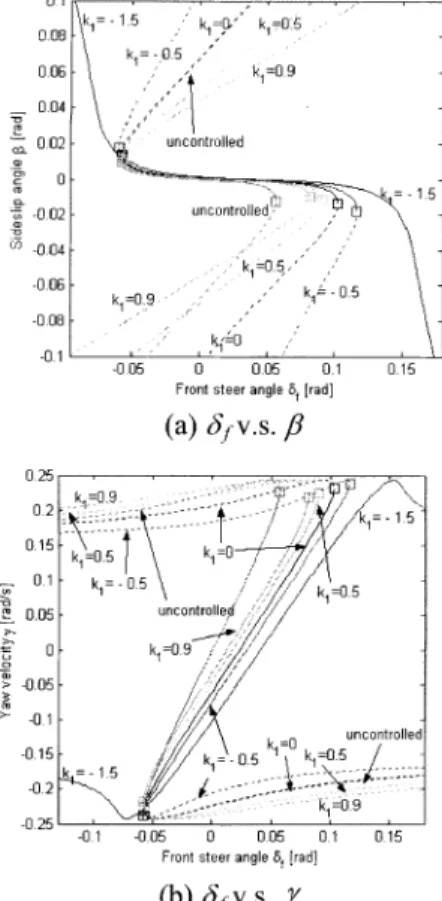
be treated as another bifurcation parameter. A two-parameter analysis of saddle nodebifurcation isobtained for k2 0.1 as depicted in Fig. 3, which indicate the location of saddle node bifurcation points. The symbol"s"in Fig. 3 denotes the stable operating zone, while "u" denotes the unstable operating zone. It is observed from Fig. 3 that the number of saddle node bifurcation will be different ask,
varies. In addition to those bifurcation scenarios shown in Fig. 3, there are two more saddle node bifurcation points for 32.8656>k,
> -0.99 and four saddle node bifurcation points for -1.2605<k,
<-0.99. Moreover, there is no saddle node bifurcation point for k,<-1.2605.
Figure 4 presents four saddle node bifurcation points when
k1=
-1.2 and k2= 0.1, and Figure 5 shows the bifurcation diagramwith respect to the differentsettingofk,
atk2 = 0.1. Theobservations from of Fig. 3 are verified by those shown inFigs. 4 and 5. For k2= 0.1, the equilibrium pointSNBPO1 of system(4)-(5)isasymptoticallystable when -3.1276<ki
< 0.2982.FromFig. 6, we canobserve the stability ofSNBPO1atdifferent value of
ki.
We found that SNBPO1 is a stable equilibriumpoint fork1
=- 1.5, -0.5and 0 whileSNBPO1 is an unstableequilibriumpoint fork,
= 0.5 and 0.9. Those agree withthe results ofCorollary 2.B. ControlDesignfor theEquilibriumPoint
SNBPJ3
Next, we construct the stabilization control laws for the system (4)-(5)atthe saddle nodebifurcationpointSNBP13. AsobservedinFig. 2(a),the stableregionof
3f
is very small forv=40 m/s. To check the controllability ofSNBP13,wehavedet[C]= 264.339 . 0 Hence, the linearized model at
the point SNBP13 is controllable. Follow the same control schemeasproposedin Theorem 1,wehave thenextresult. Corollary 3. The saddle node bifurcationpointSNBP13 of system (4)-(5) is asymptotically stabilizable by the linear
control law if the feedback gains
k1
and k2 satisfy thefollowingtwoconditions:
(i) k2 >-0.1306, (34)
(ii) -3.2952-23.9914k2 <
kI
<0.0004+1.2481k2. (35) Similarly, let k2 = 0.1. A two-parameter bifurcation diagram ofdf
andk1
isdepictedinFig. 7, which presents the location of saddle node bifurcation points. There are two-1.1625, there is no saddle node bifurcation point. For -1. 1625<
k,
<-1,there are four saddle node bifurcation points. Figure 8 shows four saddle node bifurcation points at v=40 m/s, k1= -1.1 and k2= 0.1, and Fig. 9 shows bifurcation diagram with respect to the different values of k1 atk2 = 0.1. Whenk,
= 1,there is nosaddle node bifurcation point and all equilibriumpoints of system (4)-(5) are unstable. At k2 =0.1,
the equilibrium point SNBP13 of system (4)-(5) is asymptoticallystable for -5.6943 <kl<
0.1252. Thestability of system (4)-(5) at SNBP13 for different values ofk,
is shown in Fig. 10. Those agree with the result ofCorollary3.VI. CONCLUSIONS
In this paper, we focused on the nonlinear study of the second-order model of vehicle's lateral dynamics. The stationarybifurcationphenomenon is predicted and observed inthis system. A direct statefeedback designwasproposed to stabilize the system at the bifurcation point. The two-parameterbifurcation analysiswith respecttothesetting ofcontrol gains were also obtained, which can provide a guide for the selection of the applied control efforts for preventing and/or delaying the occurrence of system instabilities.
REFERENCES
[1] J.Y.Wong,TheoryofGround Vehicles. John Wiley &Sons, Inc., 2001.
[2] J. Ackerman,J.Guldner,W. Sienel,R.Steinhauser, and V. I. Utkin, "Linear and nonlinear controller design for robustautomaticsteering,"
IEEETrans.Contr.Syst.Technol., Vol.3, pp. 132-143, 1995.
[3] H. Peng, and M. Tomizuka, "Vehicle lateral control for highway automation,"Proc. 1990AmericanControl Conference, San Diego,CA, May23-25, 1990.
[4] H. Peng, T.Hessburg,M.Tomizuka, andW.Zhang,"Atheoreticaland
experimental studyonvehiclelateral control,"Proc. 1992 American
ControlConference, Chicago,IL, June24-26,1992.
[5] E. Ono, S. Hosoe, H. D. Tuan, and S.Doi, "Bifurcation in vehicle dynamics and robust front wheel steering control," IEEE Trans.
Control Systems Technology, Vol.6, No. 3, pp.412-420,1998.
[6] L. R. Ray, "Nonlinear stateand tire force estimation for advanced vehiclecontrol,"IEEETrans.ControlSystemsTechnology, Vol.3, No.
1,pp.117-124,1995.
[7] N. Kopell and L. N. Howard, Bifurcations and trajectories joining
criticalpoints, AdvancesinMathematics,Vol. 18,pp.306-358, 1975. [8] E.H.Abed andJ. H. Fu,"Local feedback stabilization andbifurcation
control, II. Stationary bifurcation," System andControlLetters,Vol. 8,
pp.467-473, 1987.
[9] D.-C.Liaw andE. H.Abed,"Stabilization of tethered satellites during station-keeping,"IEEETrans. AutomaticControl, Vol.35, No. 11,pp.
1186-1196,1990.
[10] D.-C. Liaw and E. H. Abed, "Active control ofcompressor stall
inception:abifurcation-theoretic approach,"Automatica, Vol. 32, No. 1,pp. 109-115, 1996.
[11] D.-C. Liaw andC.-C. Song, "Analysis oflongitudinalflightdynamics:
abifurcation-theoretic approach," Journal of Guidance, Control,and
Dynamics, Vol.24, No.1,pp. 109-116,2001..
[12] D.-C. Liaw, H.-H. Chiang, and T.-T. Lee, "Abifurcation study of
vehicle's steering dynamics," Proc. IEEE 2005Intelligent Vehicles
Symposium,LasVegas,Nevada,USA, June 6-8, 2005, pp.388-393.
[13] E.J.Doedel,AUTO: Aprogramfortheautomaticbifurcationanalysis
of autonomous systems. Congressus Numerantium, Vol. 30, pp.
265-284, 1981. 0° 5 ' .0 " ' 004 0.02 [V=40m/s 0.01 0 v=lOm :0-01 CO-0.02 v=20ms i -003 -0.04 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 Front steerangle8,[radl
(a)
1f
v.s./1 0.25 0.2 --vOm- s -010 vo16m/s --- ---0.1 --- ---¢- - --- 01--0.1 ---,-. 0.15 -0.2 .---dis| -uzz -0.1 -0.05 0 0.05 0.1Front steerangle0,[radl
(b)1fv.s.
7Fig. 2.Bifurcation diagram withrespect to different v.
-0.1 -0.05 0 0.05 01 0.15 Front steerangleO,[rad]
Fig.3.Two-parameterbifurcationdiagram for
5f
v.s.ki
when v=10m/sand k2=0.1
. 015 0.1 0.06 c:2 I c 0 -0.06 -0 1 -015 -012 00 0I 0 1 00 0 -O1. -0.0 Q 0.05 0.1 0.15 0.2 Front steerangle [rad]Fig. 4. Bifurcation diagramwhen v=10 m/s,ki=-1.2 and k2
0.1. =o201 uncontrolted 1~~ ~ ~~~~0 unIont d =01 uncont ncntrolle -1 I'll 0.2, -1 5
L-0.08 0.06 004 005 -008 -0.1 -0.05 0 0.05 0.1 Frontsteerangle0,Irad]
(a)
1fv.s.
, 0.15 0.25 \1 kl -O 1 -''' 0.15 -0.21 00 0 1 r~~~~~~~~-incontrolled 0 05ao
C: 01 -0 15 -02 -0.25--006 -0.04 -0.02 0 002 .004 0.0 0.00 0.1 Frontsteerangle0,[rad]Fig. 8. Bifurcation diagram when v=40 m/s,
ki
-1.1 and k2-0.1. 0.06 0.04 002 0--0.02 -004 -0.1 -0.05 0 005 01 0.15Frontsteer angle5,[rad]
(b) 3fv.s. 7
Fig. 5. Bifurcationdiagram withrespect todifferentk0 when
v=10 m/s andk2=0.1. 0.017 to1= 0~5 0.016 1 0 015 05 0.014 1.5 0.013 =- 1 0. ~0.012-r 011ouncontod 1 0.011 -~5'0. 0.01 0000~~ ~~~~~~k= -0.06 -0.059 -0.058 -0.057 -0.056 -0.055
Frontsteerangle0,[radl
Fig.6. Zoom inonFig. 5(a)nearSNBPO1.
-2 01
3t -O. c
-004 -0.02 0 002 Front steerangle5,[rad]
(a) jfv.s.
0.04 105
(b) 3/vS. 7
Fig.9. Bifurcation diagram withrespecttodifferent k1 when
v=40m/s andk2= 0.1.
Fig.7.Two-parameterbifurcationdiagramfor 3fv.s.k1 when
v=40 m/s andk2 =0.1. Fig. 10.Zoom inonFig.9(a)nearSNBP 13.
k. -,.5 k 05 9