國 立 交 通 大 學
機械工程學系
碩士論文
使用六自由度史都華平台驗證火箭動態感測系
統
Six degrees of freedom Stewart platform to
verify the rocket dynamic sensing system
研究生 : 曹修銓
指導教授:陳宗麟 博士
使用六自由度史都華平台驗證火箭動態感測系統
學生:曹修銓 指導教授:陳宗麟 博士
國立交通大學 機械工學系碩士班
摘要
探空火箭(Rocket)應用於蒐集太空及大氣中的各種資料,常需要於火箭上承 載能夠追蹤其加速度、角速度的加速計與陀螺儀等量測儀器。但在進行真實發射 任務之前,通常必須經過繁複的測試,以確定感測系統在火箭運動模式下所得到 的資料是否能驗證火箭的真實運動,以及確認感測系統的量測範圍,最大承載加 速度等。 火箭於飛行路徑中之運動控制往往於軟體上模擬設計,若有一硬體設備能創 造出空間中三軸加速度與角速度曲線,模擬火箭於空中運行之物理狀況,將可利 用此系統進行硬體模擬。 史都華平台(Stewart Platform)為一六軸機構,屬於並聯型機器人的一種,此 種機構因擁有封閉鏈拘束的關係,故相比於傳統串聯型機器人擁有較大的剛性, 較小的慣性,以及承載能力與精度較高的優點,經常應用於大重量負荷以及高速 的運動模擬上。 基於上述史都華平台等優點,以及火箭對於驗證運動感測器的需求,本論文 利用六軸史都華平台設計一種可驗證空間中三軸加速度及三軸角速度的驗證系 統,利用此系統,將來在進行火箭實際發射任務前,可直接利用此系統進行火箭 感測系統的測試、驗證等工作,另外並且可利用此系統對火箭做硬體式模擬,設 計與測試火箭之控制器等等。Stewart platform with six degrees of freedom dynamic sensing
system validation rocket
Student: Xiu-Quan Cao Advisor: Dr.Tsung-Lin Chen
Department of Mechanical Engineering National Chaio Tung
University
Abstract
In order to collect many kinds of information at high altitude air, many devices such as, accelerator and gyroscope…etc, are equipped on rocket. However, a lot of tests and experiments need to undergo for accuracy of detecting system when rocket is flying and measuring range of detecting system, before launch.
Rocket flying trajectory can be simulated from computer software, but if there’s hardware can simulate the path and real conditions in air, then the simulation result of this system will be more convincing than software.
Stewart Platform is a 6-axes device, belonged to one kind of parallel manipulator. Compare to traditional parallel manipulator, Stewart platform is much stiffer, less inertia, higher loading ability and more accurate, owing to closed loop constrain. Hence it usually applies on simulations with high weight loading and high speed.
Depends on these advantages and requests of rocket flying, this study proposes a verifying system by Stewart platform to design a coordinate with 3 axes linear acceleration and 3 axes angular velocity, and prove them. This system can verify detecting system and simulate status of flying, furthermore, can also design and test controller of rocket.
致謝
本論文可以完成感謝指導教授,陳宗麟老師的幫忙與教導,感謝學長張正暘, 吳健彰友情幫助,感謝同學吳承懋、林奕帆、黃士維、王柏翔、李泓輝的幫助, 感謝學弟張俊強、吳政寬、陳雅惠、林宜璇、蔡鎮宇、陳冠豪、黃博詮、鄭睿群、 吳子成、林廷儒的大力幫助,也感謝父母的背後支持。
目錄
摘要 ··· I
致謝 ··· III
目錄 ··· IV
圖表 ··· VII
數學符號 ··· X
第一章 ··· - 1 -
簡介 ··· - 1 -
1.1 機器人發展之背景 ··· - 1 - 1.2 史都華平台之背景 ··· - 3 - 1.3 動機與目的 ··· - 4 - 1.4 論文剛要 ··· - 5 -第二章 ··· - 6 -
六自由度史都華平台之運動學分析 ··· - 6 -
2.1 六自由度史都華平台結構分析 ··· - 6 - 2.2 座標軸定義與姿態角 ··· - 8 - 2.3 旋轉矩陣 ··· - 10 - 2.4 逆向運動學推導 ··· - 11 - 2.5 速度雅可比矩陣 ··· - 14 -2.6 模擬結果與討論 ··· - 14 -
第三章 ··· - 20 -
六自由度史都華平台動力學分析 ··· - 20 -
3.1 機器人動力學簡介 ··· - 20 - 3.2 尤拉-拉格朗日方程式介紹 ··· - 21 - 3.3 史都華平台動力學分析 ··· - 22 - 3.3.1 拉格朗日函數 ··· 22 3.3.2 尤拉拉格朗日方程 ··· 23 3.3.3 加入拘束力描述 ··· 25 3.3.4 變數代換簡化模型 ··· 27 3.3.5 總結 ··· 29 3.3.6 模擬結果與討論 ··· 29-第四章 ··· - 40 -
驗證系統流程設計 ··· - 40 -
4.1 設計目的 ··· - 40 - 4.2 驗證系統流程規劃與設計 ··· - 41 -第五章 ··· - 43 -
器驗證系統實現 ··· - 43 -
5.1 實現驗證系統使用之設備簡介 ··· - 43 - 5.1.1 史都華平台 ··· 43 5.1.2 運動控制卡 ··· 46 5.1.3 資料擷取卡 ··· 49 5.1.4 感測器 ··· 51 5.1.5 程式軟體 ··· 52 -5.2 實現驗證系統的過程與方法 ··· - 53 -六章 驗證系統結果與討論 ··· - 54 -
6.1 驗證系統單軸加速度與繳速度結果與討論 ··· - 54 -6.2 驗證系統六軸混合加速度與繳速度結果與討論 ··· - 59 -
第七章 未來展望 ··· - 63 -
參考文獻 ··· - 64 -
圖表
圖 2.1(a)六自由度使都華平台正面圖 ··· 7 圖 2.1(b)六自由度使都華平台背面圖 ··· 7 圖 2.2(a)六自由度史都華平台簡圖 ··· 9 圖 2.2(b)3-2-1 尤拉角定義圖 ··· 9 圖 2.3(a)史都華平台運動學關係式 ··· 9 圖 2.3(b)史都華平台向量分析圖 ··· 11 圖 2.3(c)史都華平台向量分析圖 ··· 11 圖 2.5(a)逆向運動學 Simulink 模擬圖 ··· 15 圖 2.5(b)運動學模擬 Case1 結果圖 ··· 16 圖 2.5(c)運動學模擬 Case2 結果圖 ··· 16 圖 2.5(d)運動學模擬 Case3 第一根伸縮軸結果圖 ··· 17 圖 2.5(e)運動學模擬 Case3 第二根伸縮軸結果圖 ··· 17 圖 2.5(f)運動學模擬 Case3 第三根伸縮軸結果圖 ··· 18 圖 2.5(g)運動學模擬 Case3 第四根伸縮軸結果圖 ··· 18 圖 2.5(f)運動學模擬 Case3 第五根伸縮軸結果圖 ··· 19 圖 2.5(i)運動學模擬 Case3 第六根伸縮軸結果圖 ··· 19 圖 3.3(a)史都華平台動力學使用 Simulink 模擬圖 ··· 31 圖 3.3(b)史都華平台動力學模擬參數表 ··· 31 圖 3.3(c)動力學模擬 Case1 結果圖 ··· 32 圖 3.3(d)動力學模擬 Case1 Px 反應圖 ··· 32 圖 3.3(e)動力學模擬 Case1 Py 反應圖 ··· 33 圖 3.3(f)動力學模擬 Case1 Pz 反應圖 ··· 33 圖 3.3(g)動力學模擬 Case2 結果圖 ··· 34 圖 3.3(h)動力學模擬 Case2 Px 反應圖 ··· 34 圖 3.3(i)動力學模擬 Case2 Py 反應圖 ··· 35 圖 3.3(j)動力學模擬 Case2 Pz 反應圖 ··· 35 圖 3.3(k)動力學模擬 Case3 結果圖 ··· 36 圖 3.3(l)動力學模擬 Case3 Px 反應圖 ··· 36 圖 3.3(m)動力學模擬 Case3 Py 反應圖 ··· 37圖 3.3(n)動力學模擬 Case3 Pz 反應圖 ··· 37 圖 3.3(o) 動力學模擬 Case4 結果圖 ··· 38 圖 3.3(p)動力學模擬 Case4 Px 反應圖 ··· 38 圖 3.3(q)動力學模擬 Case4 Py 反應圖 ··· 39 圖 3.3(r)動力學模擬 Case4 Pz 反應圖 ··· 39 圖 4.2(a)感測器驗證系統設計流程圖 ··· 41 圖 4.2(b)感測器驗證系統驗證流程圖 ··· 42 圖 5.1(a)史都華平台所有設備圖 ··· 44 圖 5.1(b)史都華平台之控制箱圖 ··· 45 圖 5.1(c)史都華平台之控制箱正面面板圖 ··· 45 圖 5.1(d)史都華平台之控制箱背面圖 ··· 45 圖 5.1(e)史都華平台之感測原件圖 ··· 46 圖 5.1(f)運動控制卡 PCI-7356 圖 ··· 47 圖 5.1(g)運動控制卡 Contoured Moves 示意圖 ··· 48 圖 5.1(h)NI 73xx 運動控制卡函式庫圖 ··· 48 圖 5.1(i) NI PXIe-6363 視圖 ··· 49 圖 5.1(j) NI PXIe-1082 視圖 ··· 50 圖 5.1(k) NI DAQ 小幫手示意圖 ··· 50 圖 5.1(l) AccelRate3D 視圖 ··· 51 圖 6.1(a)Px 軸加速度結果圖 ··· 54 圖 6.1(c)Py 軸加速度結果圖 ··· 55 圖 6.1(c)Pz 軸加速度結果圖 ··· 55 圖 6.1(d)α角角速度結果圖 ··· 56 圖 6.1(e)β角角速度結果圖 ··· 56 圖 6.1(f)γ角角速度結果圖··· 57 圖 6.1(g)Leg1 Encoder 結果圖 ··· 58 圖 6.1(h)Leg2 Encoder 結果圖 ··· 58 圖 6.1(i)Leg3 Encoder 結果圖 ··· 59 圖 6.2(a)Ax 軸結果圖 ··· 60 圖 6.2(b)Ay 軸結果圖 ··· 60 圖 6.2(c)Az 軸結果圖 ··· 61 圖 6.2(d)Wz 軸結果圖 ··· 61
圖 6.2(e)Wz 軸結果圖··· 62 圖 6.2(f)Wz 軸結果圖 ··· 62
數學符號
:上頂板中心點參考於慣性座標軸之 X 軸分量 :上頂板中心點參考於慣性座標軸之 Y 軸分量 :上頂板中心點參考於慣性座標軸之 X 軸分量 :上頂板對慣性座標 Z 軸旋轉之姿態角 :上頂板對附體座標 y’軸旋轉之姿態角 :上頂板對附體座標 x’’軸旋轉之姿態角 :上頂板中心座標與三個姿態角所構成之向量 :史都華平台廣義座標所構成之向量或史都華平台之主動驅動軸所構成之向量 :慣性矩陣 :科氏力矩陣 :重力矩陣 :速度雅可比矩陣 :史都華平台伸縮軸之桿長 :史都華平台旋轉軸之角度 :史都華平台之輸入驅動力 :消散函數或旋轉矩陣 :拉格朗日函數 :拉格朗日乘子第一章
簡介
1.1 機器人發展之背景
21 世紀後,為了節省人力與工業上的需求,機器人的研究乃研究領域的一 大重點,伴隨著各種與機器人相關的著名電影如變形金剛、機械公敵、鋼鐵人等, 也讓一般民眾對機器人有所了解,各國政府也對機器人領域投入龐當經費,支持 有關機器人領域的開發與研究。但事實上因應電影業的需求,電影業對機器人的 描述通常有所誇大,也讓一般民眾對於機器人有所誤解,對於一般大眾電影所了 解的機器人在研究領域上可通稱為智能型機器人(Intelligent robots) ,屬於具有極 高智慧,可替代人類行為之機器人,此種機器人雖然仍為研究領域的重點,但實 是上對於此種類型的機器人,在近幾十年並未有太大突破性的進展。事實上目前 廣大的研究以及工業界經常使用的機器人仍然為兩種傳統型式機器人,一種為串 聯式機器人(Serial manipulators) ,另一種為並聯式機器人(Parallel manipulators), 此兩種機器人仍為工業上經常主要使用之機器人種類以及占據機器人研究資料 的大部分,當然除此兩種機器人仍有些其他如自走型機器人(Mobile robots)、前 述之智能型機器人等其他種類的機器人相關研究,但不論工業與研究仍然以上述 兩種傳統機器人為主要多數。串聯型機器與並聯型機器人各有著不同的結構、應用領域、優缺點。串聯型 機器人為一單鏈開鏈結構(Open loop chain),並聯型機器人則為一多鏈結構,且 各鏈最終連結在一起形成一封閉鏈結構(Close loop chain) ,研究上發現,雖然串 聯型機器人與並聯型機器人結構上不同,但各種關於串聯型機器人的研究與並聯 機器人都有一些相似性或對偶關係,一些適用於串聯機器人問題的解決方法,也 可相似於並聯機器人之上,又由於封閉鏈結構的關係,使得並聯型機器人在分析 上較串聯型機器人困難許多,因此在分析並聯機機器人的問題上,將並聯機器人
簡化,將其視為串連機器人來分析與解決問題,為經常使用之辦法,隨然此種方 法因忽略了並聯機器人其封閉鏈結構的複雜拘束關係,因此會產生分析上的誤差 以及不適用性,但對於可容許之誤差範圍內的結果,此種方法仍有其便利性與效 率,也因此在串聯型機器人與並聯型機器人的研究上有著相輔相成的關係,因此 於一開始本論文將此兩種型式機器人做簡略之介紹與比較,以說明此兩種型式機 器人相異與相似之處、不同的優缺點與應用場合。 並聯機器人之優點: 1 高精度:由於並聯機器人藉由多運動鏈同時操作末端執行器(End effector)的 關係,抵銷了關節間的誤差累積效應,因此相較於串聯機器人,並聯機器人擁有 較高的精度。 2 高剛性:由於多鏈的關係,使得並聯機器人相較串聯機器人擁有較好的剛性, 可以承載較大的負重,因此並聯機器人多可以用於大重量物件的承載及模擬。 3 低慣量:由於多鏈關係使得並聯機器人輕易能達到高剛性,因此並聯機器 人一般構件較串聯機器人少,使得並聯機器人擁有較低的運動慣性,這間接使得 並聯機器人能夠成為一個潛在的高速度、高精度的運動平台。 並聯機器人之缺點: 1.結構複雜:相較於串聯機器人,並聯機器人擁有較複雜的結構,關結之間存 在著嚴格的偶合關係,因此分析上與控制上相較於串聯機器人都較為困難。 2.工作空間小:相較於串聯機器人,並聯機器人由於封閉拘束的關係,使得並 聯機器人工作空間較串聯機器人為狹小。 3.正向運動學求解困難:相較串聯機器人的正向運動學為解析解,並聯機器人 的正向運動學一般多為數值解且多解,在求解上較為困難。 串聯機器人之優點:
1.結構簡單:單鏈且開放鏈的結構,使得串聯機器人結構分析上比並聯機器人 來的容易,容易快速使用,操作靈活。 2.工作空間大:沒有封閉拘束的關係,使的串聯機器人,其工作空間比並聯機 器人來的廣大。 串聯機器人之缺點: 1.低剛性:單鏈的結構往往使得串聯機器人剛性不足,這於實際應用上,串聯 機器人往往不能夠應用於中高負重的場合上。 2.低精度:串聯機器人關節間的誤差,會由於誤差累積效應,造成最後末端執 行器誤差較大,精度較並聯機器人低。 綜合以上敘述,可知串聯機器人擁用結構簡單、工作空間大、操作靈活、正 向運動學求解簡便等優點,而並聯機器人則有運動慣量低、負載能力強、剛度大 等優點,比較可之,串聯機器人與並聯機器人之優缺點剛好相反,為互補關係, 也因此在實際應用上,並聯機器人補足了串連機器人的缺點,在大型物體的承載 以及運動模擬與需要高精度定位的應用如外科手術上,並聯機器人則得到了較為 廣泛的使用,而相反在需要能夠快速頻繁使用的場合,如工業生產線上,串聯機 器人則較為廣泛的應用,也因此可知串連機器人與並聯機器人在應用上有著相輔 相乘的關係。而這其中本論文所使用之六自由度史都華平台亦屬於並聯機器人的 一種,故也繼承了所有並聯機器人包括之優點、缺點及特性。
1.2 史都華平台之背景
並聯機器人此類形之機構出現始於 20 世紀 30 年代,1962 年時,Gouth 發明 了一種基於並聯機構的六自由度輪胎檢測裝置,Gouth 所設計之機構擁有上下兩 個平台,下面之平台為固定,上面之平台為可移動式,上下兩平台間由六條鏈結 相聯,在此運動協調下,上面之平台擁有空間中的六個運動自由度。1965 年, Stewart 博士對於 Gouth 所設計之機構提出了機構上的研究分析,並將其應用於 飛行模擬上,並提出了論文發表[1] ,從此學術界開始注意到並聯機器人的潛在 優勢及應用的前景,關於並聯機器人的廣大研究也至此開始,也因此為了紀念Gouth 及 Stewart 博士的貢獻,因此一般多稱呼此種六自由度並聯機構為 Gouth 平台或 Stewart 平台,由於對於並聯機器人的廣大研究,後續也漸漸出現有別於 此種六自由度的並聯機器人,如三角機器人(Delta robo)t 或一些(5、4、3)低自由 度的並聯機器人類型,故 Stewart 平台乃屬於並聯機器人類型的其中一種,且為 最早出現的型式,但並不屬於並聯機器人的全部。
1980 年,Fichter 和 Mcdowell 設計了一種由 Stewart 平台衍生的並聯機器人, 並探討了關於此機構的反向運動學問題[2],這是最早有關於史都華平台之反相 運動學的探討,在這之後的 1985 年,M.G.Mohamed 與 J.Duffy 發表了有關六軸 運動平台的末端執行器速度與驅動器輸入速度之間的關係[3] ,1992 年,V.Kumer 發表了關於六軸平台在平台與驅動器之間速度與加速度的關係,1993 年 Kai Liu 完整分析了有關六軸運動平台的順向運動學以及逆向運動學的問題[4],Chien-Yu Ji 等人分析了 3-RRPS 六自由度史都華平台之逆運動學[5],至此有關一般型式的 六自由度史都華平台的運動學問題得到大部分的解決。
Codourey A.和 Burdet E.等人提出了利用 Newton-Euler 方程式建立起六軸並 聯機構的動力學模形[6][7][8],但利用 Newton-Euler 方程式來建模需要考慮到機 構的內力,較為複雜,基於建模方便快速等理由,Tasi 與 Kang 等人提出了利用 Lagrange Equation 方法來建構六自由度史都華平台的動力學模形[9][10][11],Min Jie Liu 等人提出了利用 Kane Equation 方法來建構六軸平台動力學模形[12][13], 其他的還包括虛功原理(Virtual work)[14][15]及其它方法等等[16][17][18][19] 。
1.3 動機與目的
對於探空火箭(Rocket)的發射過程中,必須乘載各種能夠掌握火箭運動過程 中加速度、角速度、位置等各種感測器,這些資料能夠確保我們了解火箭的運行 路徑及運動狀況,這對於一般火箭發射所乘載的任務,如捕獲大氣資料等等,能 起到輔助的作用,以利於將火箭任務得到的資料將火箭路徑做相互交叉比對,並 且能夠於事後了解火箭的飛行狀況是否如當初設計之路徑運行等其他相關問題。 基於這些種種原因,我們可知對於火箭上所裝載的加速度、角速度等此類運動感 測器,其重要性對於火箭發射任務非比尋常。由於對於運動感測器對於火箭發射任務的重要性,因此一般傳統在實際發射 火箭任務之前,必須頻繁的將這些裝載於火箭之上的運動感測器進行測試,以確 保在實際發火箭發射過程中,能夠確保萬無一失。 有鑒於此,本論文基於火箭發射前的運動感測器的測試需求,以及傳統對於 乘載於火箭上之運動感測器測試作業流程的缺點,希望能夠設計出一種簡易的驗 證系統,此系統雖然未必能如大型中心的大型機構能夠做到極高精度的量測或某 些極限值的驗證,但此系統能夠簡易且快速的使用,幫助火箭發射前運動感測器 進行頻繁的測試,以利火箭任務能夠快速且順利的完成,此乃本論文的動機與目 的。 基於此動機與目的,考慮到六自由度史都華運動平台的優點的特性,有機會 能夠設計出符合本論文目的之驗證系統,因此本論文最後決定利用六自由度史都 華平台,設計此驗證系統,用於實際火箭發射前其運動感測器的驗證以及測試。
1.4 論文剛要
本論文於第一章將並聯機器人的背景以及動機與目的做了介紹,第二章將介 紹本論文所使用之六自由度史都華平台之結構與座標定義,並詳細分析此六自由 度史都華平台之逆運動學,此部分推導將應用於後面第四章的及第五章的驗證系 統設計,第三章將推導此六自由度史都華平台之動力學模型,此部分推導未來可 應用於設計此平台之控制器,控制並強化此驗證系統的精確度,第四章設計了此 驗證系統的流程,第五章開始將第四章所設計之驗證系統流程應用 LABVIEW 軟 體,以及資料擷取卡、運動控制卡、六自由度史都華平台等等,將流程一一實現, 並將實現出的驗證系統一一進行測試,第六章我們將測試的結果進行整理呈現且 討論,最後於第七章討論了本驗證系統未來的改善空間及後續未來計劃與展望等 等,有關論文中推導公式中的詳細代數細節內容,由於篇幅有限,內容較大之代 數値,最後統整於本論文最後之附錄章結。第二章
六自由度史都華平台之運動學分析
本章節討論了本論文使用之六自由度史都華平台之結構,以及運動學分析, 六自由度史都華平台之運動學承載了並聯機器人的特性,其逆向運動學為一解析 解,正向運動學為數值解,此特性正好跟串聯機器人相反,稱為並聯機器人與串 聯機器人運動學的對偶關係。2.1 六自由度史都華平台結構分析
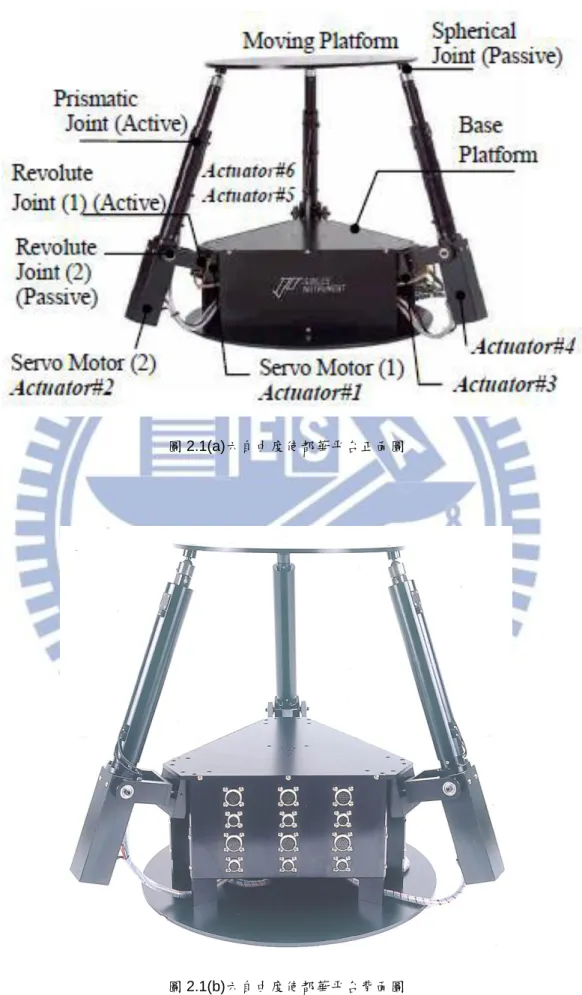
本節首先介紹本論文使用之六自由度史都華平台,簡略分析此平台的結構組 成,以利於處理 2.2 節的簡化圖實施與座標軸定義等問題。 首先,如圖 2.1(a)及圖 2.1(b)所示,即為本論文所使用之六自由度史都華平 台,2.1(a)乃此平台正面正視圖,圖 2.1(b)乃反面正式圖,此平台是由台灣公司仿 真科技所製造,如圖所示,此平台擁有上下共兩個平板,其中下平板(Base plane) 為固定不動,上平板(Top plane)為一活動式平板,上下兩平板總共使用三條鏈結 相聯,這三條鏈結每一條由下而上依序為一主動旋轉軸(Revolute joint)、一被動 旋 轉 軸(Revolute joint) 、一主動伸縮驅動軸 (Prismatic joint)及一球形連結器 (Spherical joint)相聯而成,依據機構學的定義,旋轉軸的縮寫為 R,伸縮軸的縮 寫為 P,球形連結器為 S,又本機構共擁有三條鏈結,故本機構依照連結軸的順 序可稱為 3-RRPS 六自由度史都華平台,但為了方便本論文後面都將以史都華平 台簡稱本論文所使用之此平台,此平台雖然只有三條鏈結,但共有六個可由伺服 馬達驅動之主動驅動軸,其中三個為伸縮軸,三個為旋轉軸。其三個主動伸縮驅 動軸如圖 2.1(a)所示分別為 Actuator#2、Actuator#4、Actuator#6,此驅動軸可使 得上頂板與下底板之間的三根鏈結伸長及縮短,另外三個主動旋轉驅動軸分別為 Actuator#1、Actuator#3、Actuator#5,可使得三根鏈結繞其旋轉軸軸心旋轉,故 共可使上頂板達到空間中六個自由度的運動,符合本論文設計驗證系統之需求。圖 2.1(a)六自由度使都華平台正面圖
2.2 座標軸定義與姿態角
由 2.1 節介紹完本論文所使用之史都華平台後,與本節我們必續規劃出此史 都華平台之簡圖,以及定義其座標軸與三個姿態角。 圖 2.2(a)即為本論文規畫出史都華平台之簡圖及座標軸定義,由圖可知,此 平台上頂板與下底板之間藉由鏈結相連,共會在上頂板與下底板各產生一個交點, 其中上頂板之交點用 T 來簡稱,下底板用 B 來簡稱,因此下底板與鏈結之交點 順時針依序為 B1、B2、B3,上頂板依序為 T1、T2、T3,而 B1 與 T1 之間的鏈 結則在此簡稱為 Leg,因此依序為 Leg1、Leg2、Leg3,為了推導此平台之相關 運動學及動力學公式,必須建立一慣性座標(Inertial coordinates)以及附體座標 (Body coordinates),在本論文慣性座標之座標軸用大寫之 XYZ 來代表,附體座 標之座標軸則用小寫之 xyz 來表示,如圖所示,本平台之慣性座標原點固定於下 底板圓形中心,其半徑為 R, X 軸指向 B2,Y 軸垂直於 X 軸指向 B1 及 B2 中 間,Z 軸依據右手定則往上指,而附體座標其定義類似於慣性座標,其原點固定 於上頂板之圓心,上頂板半徑為 r,其 x 軸指向 T2,y 軸指向 T1 及 T2 中間,T3 依據右手定則往上指,與慣性座標不同的是,慣性座標為固定於底板之上不會移 動,而附體座標乃隨著上頂板運動而跟隨著移動,此即為史都華平台之結構與座 標定義,利用此座標定義,我們即可以藉由上頂板圓心的慣性座標值來描述上頂 板於空間中之位置,但上頂板為一剛體,除了用圓心座標來描述其位置外,還必 須擁有一組姿態角用來定義其在空間中的姿態,並且有了座標軸定義與姿態角定 義,也才能在之後用來推導使都華平台的逆運動學與動力學相關公式,因此接著 我們即將利用定義出的慣性座標與附體座標,定義出三個姿態角。 在空間中描述一剛體之姿態,必須用一組順序的姿態角來描述,空間中剛體 即能利用此組姿態角,旋轉至空間中任何姿態,姿態角的定義有非常多種,本論 文使用 3-2-1 之尤拉角定義此三個姿態角,其 3-2-1 尤拉角定義如圖 2.2(b)所示, 其中圖中實線座標為慣性座標,虛線為附體座標,其三組姿態角定義分別為,首 先上頂板對慣性座標 Z 軸轉動一個γ角度,稱為 Yaw,此時附體座標跟著轉動 會產生新的 y 軸稱為 y’,此時上頂板再對 y’旋轉β角,稱為 Pitch,此時一樣附 體座標跟著旋轉產生新的 x 軸稱為 x’’,上頂板再對 x’’旋轉α角,稱為 Roll,此即我們定義的三個尤拉角,上定板依據此旋轉定義及 Yaw-Pitch-Roll 的這個旋轉 順序,可達到空間中的任何姿態,換句話說即上定板在空間中的任何姿態,我們 都可以用依照這三個順序及定義的尤拉角表示出來,在加上上頂板的圓點參考自 慣性座標的座標位置,上頂板在空間中的位置及姿態即可完全描述。 圖 2.2(a) 六自由度史都華平台簡圖 圖 2.2(b)3-2-1 尤拉角定義圖
2.3 旋轉矩陣
在定義出三組姿態角後,我們必須求得此三組姿態角所對應之旋轉矩陣,以 用於本節之後的逆運動學以及動力學推導。 在定義姿態角的過程中,每定義一個姿態角,即會產生一旋轉矩陣,將此三 組之旋轉矩陣按照旋轉順序右乘,即可得到最後的附體座標相對於慣性座標的旋 轉矩陣,此旋轉矩陣能夠將空間中向量參考至附體座標之值,轉為參考慣性座標, 以下即按照三個姿態角順序,分別求得對應之旋轉矩陣,最後右乘求得最後附體 座標相對於慣性座標之旋轉矩陣。 首 先 我 們 對 Z 軸 轉 γ 角 時 會 得 到 一 組 3×3 之 旋 轉 矩 陣 (𝛾) 為 [cos 𝛾 − sin 𝛾 0sin 𝛾 cos 𝛾 00 0 1 ],接著對 y’軸轉β角時得到一組 3×3 之旋轉矩陣 (𝛽)為 [ cos 𝛽 0 sin 𝛽 0 1 0 −sin 𝛽 0 cos 𝛽],接著對 x’’軸轉α角時得到一組 3×3 之旋轉矩陣 (𝛾)為 [10 cos 𝛼 −sin 𝛼0 0 0 sin 𝛼 cos 𝛼 ],此為繞此三個姿態分別得到之三組旋轉矩陣,將此三組旋 轉矩陣,按往後的旋轉順序右乘,可以得到最後的一組 3×3 旋轉矩陣 R,下式(2.1) 即為旋轉矩陣 R。 = (𝛾) (𝛽) (𝛾) = [
cos 𝛽 cos 𝛾 − cos 𝛼 sin 𝛾 + sin 𝛼 sin 𝛽 cos 𝛾 sin 𝛼 sin 𝛾 + cos 𝛼 sin 𝛽 cos 𝛾 cos 𝛽 sin 𝛾 cos 𝛼 cos 𝛾 + sin 𝛼 sin 𝛽 sin 𝛾 − sin 𝛼 cos 𝛾 + cos 𝛼 sin 𝛽 sin 𝛾
− sin 𝛽 sin 𝛼 cos 𝛽 cos 𝛼 cos 𝛽
] ⋯ (2.1) 上式即為最後之慣性座標相對於附體座標之旋轉矩陣,利用此旋轉矩陣可將 參考於附體座標之向量轉至慣性座標,即為以下(2.2)式。 [𝒳𝒴 𝒵 ] = 3×3[𝓎] ⋯ (2.2)
2.4 逆向運動學推導
在此節我們即將推導本論文所使用之史都華平台的逆向運動學,在推導之前, 我們先介紹所謂有關機器人運動學定義如下: 順向運動學(Inverse kinematic):給定驅動軸廣義座標求得對應之末端執行器 廣義座標。 逆向運動學(Forward kinematic):給定末端執行器廣義座標求得對應之驅動軸 廣義座標。 由第一章所述,我們可之,使都華平台亦屬於並聯機器人之一種,固其運動 學定義亦同上,而在本論文史都華平台中驅動軸廣義座標即為三根主動伸縮軸之 長度與三根主動旋轉軸之角度,在本論文分別定義為 1、 2、 2及 1、 2、 3, 而末端執行器在本論文史都華平台即是指上頂板,故末端執行器廣義做標於本論 文即為上頂板圓心之三軸座標值以及三個姿態角角度,在本論文分別定義為 、 𝓎、 ,因此最後本論文史都華平台之運動學關係如圖 2.3(a)所示。 圖 2.3(a)史都華平台運動學關係式 而有如第一章所述,使都華平台為一並聯機器人,故其逆向動力學為一解析 表達式且唯一解,但順向動力學唯數值解且多解,在本論文由於需求,我們在此 只推導本論文史都華平台之逆向運動學關係式有關順向動力學問題可參考文獻 [20] ,以下我們即開始推導本論文史都華平台之逆向運動學。 首先如前述,史都華平台之逆運動學為一解析解,可以寫成下列通式(2.3): = ℱ( ) ⋯ (2.3)其中 一般代表任意型式的主動驅動軸的廣義座標向量, 代表為任意型式 末端執行器的廣義座標向量,而在此我們將其直接代表為本論文使用之史都華平 台之主動驅動軸廣義座標與上頂板之廣義座標,即為以下(2.4)式與(2.5)式: = [ 1 2 3 1 2 3] ⋯ (2.4) = [ 𝓎 𝛼 𝛽 𝛾 ] ⋯ (2.5) 而其中 1、 2、 3即為前面所述,分別代表 3 根主動伸縮驅動軸的長度, 而 1、 2、 3為 3 則為三跟主動旋轉驅動軸的角度, 、 𝓎、 、𝛼、 𝛽、𝛾則分 別為上頂板圓心參考慣性座標的三軸座標以及上頂板的三個姿態角。 而根據前述(2.3)式,表示史都華平台之上頂板廣義座標與主動驅動軸廣義座 標間存在一關係式ℱ,此一關係式即為史都華平台運動學關係式,若透過此關係 式代入或 來求得 ,即為使都華平台的逆運動學關係式,若相反,代入 來求得 ,則為順向運動學關係式。 接下來我們必須找到此關係式ℱ,就可得到史都華平台之逆運動學關係式, 要得到關係式ℱ,我們可以藉由下圖 2.3(b)的向量分析圖來得到關係式ℱ,由圖 中 可 知 向 量 ⃑⃑⃑⃑ = ⃑ + 𝒯𝒾 ⃑⃑⃑ − ℬ𝒾 ⃑⃑⃑⃑ , 將 此 關 係 式 取 絕 對 值 即 可 得 到𝒾 = ℱ( , 𝓎, 𝓎,𝛼, 𝛽, 𝛾)關係式,即為伸縮驅動軸之長度對上頂板廣義座標之運 動學關係式,接著由圖 2.3(c)可得 = cos−1( (−ℬ⃑⃑⃑⃑ × 𝒾 ⃑⃑⃑⃑ ×−ℬ𝒾 ⃑⃑⃑⃑ )∙𝒩𝒾 ⃑⃑⃑⃑⃑ 𝒾 |(−ℬ⃑⃑⃑⃑ × 𝒾 ⃑⃑⃑⃑ ×−ℬ𝒾 ⃑⃑⃑⃑ )||𝒩𝒾 ⃑⃑⃑⃑⃑ |𝒾),此即為旋轉驅 動軸與上頂板廣義座標之運動學關係式。
圖 2.3(b)史都華平台向量分析圖 圖 2.3(c)史都華平台向量分析圖 最後將上述推導得到式子做一整理得到下列(2.6)及(2.7)式: = √ 𝒳2+ 𝒴2 + 𝒵2 = ℱ1( ) ⋯ (2.6) = cos−1( (−ℬ⃑⃑⃑⃑ × 𝒾 ⃑⃑⃑⃑ × −ℬ𝒾 ⃑⃑⃑⃑ ) ∙ 𝒩𝒾 ⃑⃑ |(−ℬ⃑⃑⃑⃑ × 𝒾 ⃑⃑⃑⃑ × −ℬ𝒾 ⃑⃑⃑⃑ )||𝒩𝒾 ⃑⃑ | ) = ℱ2( ) ⋯ (2.7)
將上式(2.6)(2.7)兩式合併成為(2.8)式,即為最後的共六條逆運動學方程式, 給定上頂板的六個廣義座標值,及可求得相對應之三根桿長及三個旋轉角度, (2.6)(2.7)兩式內的代數詳細內容請參考附錄章節,在此不加贅述。 = ℱ( ) = [ℱℱ1( ) 2( )] ⋯ (2.8)
2.5 速度雅可比矩陣
將逆運動學關係式(2.8)對時間微分可以得到下列(2.9)式: ̇ =𝜕ℱ 𝜕 ̇ = 𝒥 ̇ ⋯ (2.9) 其中 𝒥 =𝜕ℱ 𝜕 ⋯ (2.10) (2.9)式代表著上頂板廣義座標與驅動軸之間的速度關係式,其中(2.10)式即 為逆運動學關係式對上頂板廣義座標的偏微分,稱為史都華平台的速度雅可比矩 陣,此雅可比矩陣在史都華平台眾多分析上皆經常使用上,本論文第三章動力學 推導也將會使用上此雅可比矩陣。2.6 模擬結果與討論
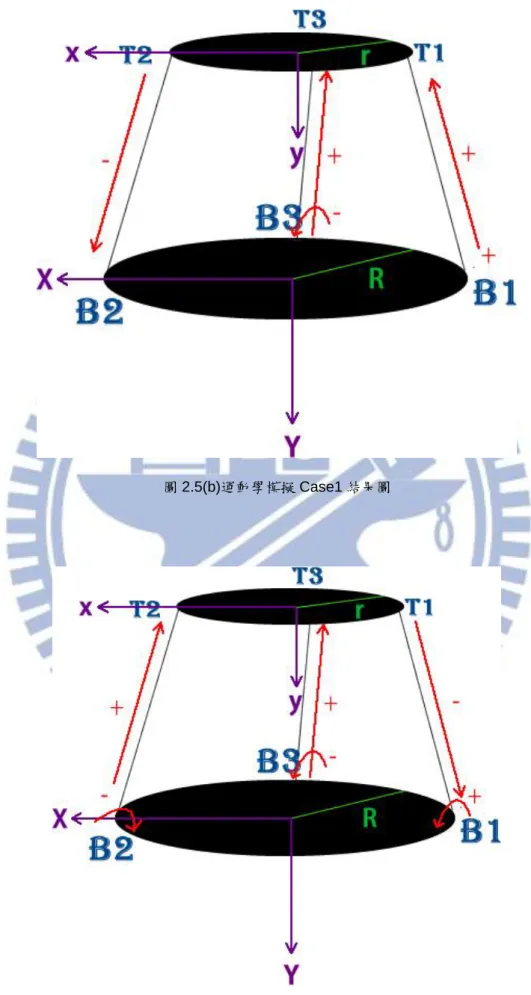
於最後此節,將本章節所推導之逆向運動學,利用 Simulink 模擬軟體撰寫 程式,測試模擬結果,並將模擬結果與實際物理現象做對照與比較,以確認推導 之逆運動方程式之正確性。 圖 2.5(a)即為使用 Simulink 軟體,將上述推導之逆向運動學撰寫為程式之視 圖,利用 Simulink 軟體,我們執行了共三組測試 Case,以下分別就此 3 組 Case 討論:Case1:在第一個例子中,我們執行當 = 100𝓂𝓂,並且其他兩軸與姿態角 都維持初始值時,求對應之三伸縮軸組伸長量與三組旋轉角度。
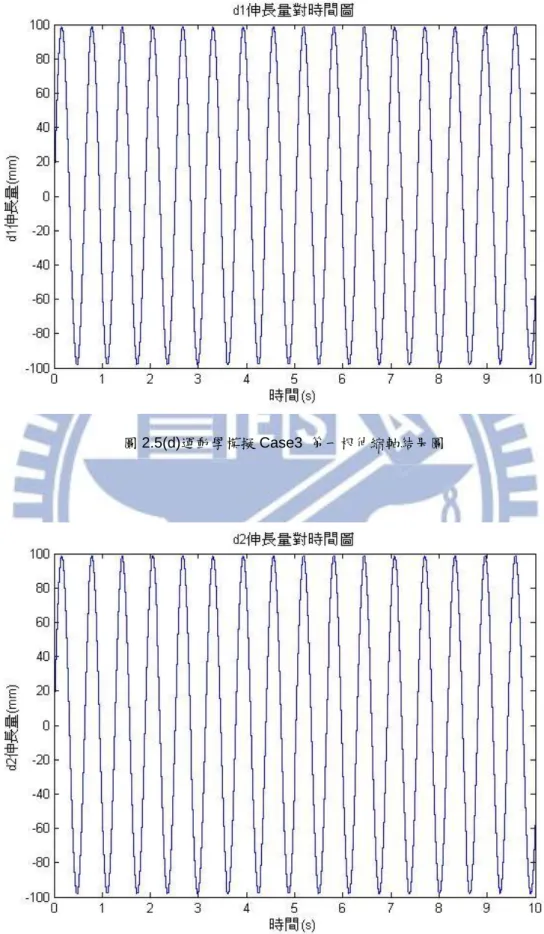
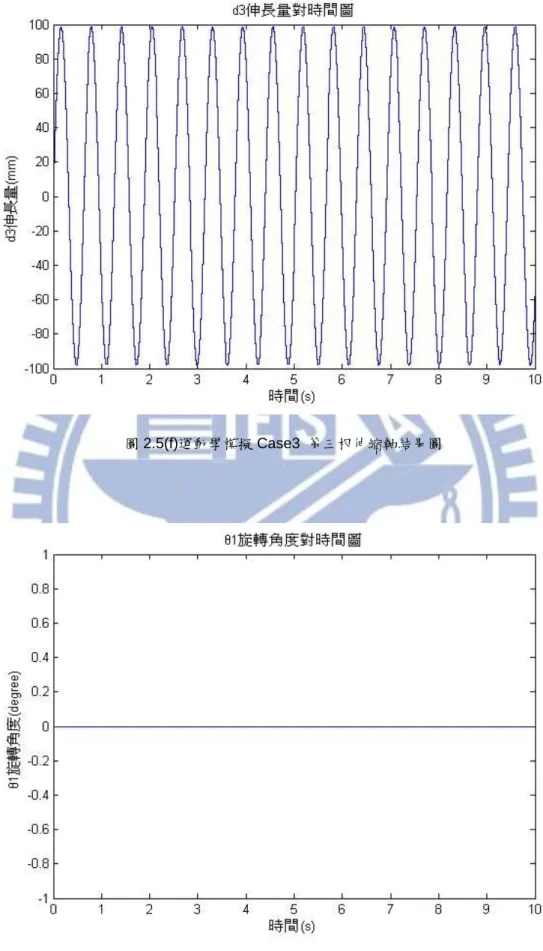
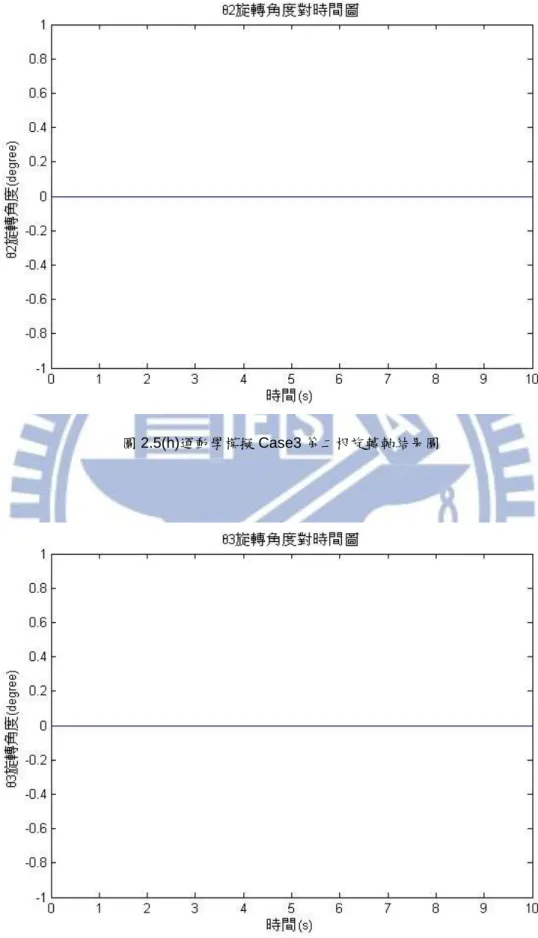
Solution1:在第一個例子中,我們得到的結果為, 1伸長了 20.95mm, 2減 少了 11.16mm, 3伸長了 20.95mm, 1增加了 10.66 度, 2維持不變, 3減少了 10.66 度,我們將所得到之結果與實際物理模型對照如下圖 2.5(b)所示。 Case2:在第二個例子中,我們執行當 𝓎 = 100𝓂𝓂,並且其他兩軸與姿態角 都維持初始值時,求對應之三組伸縮軸組伸長與三組旋轉角度。 Solution2:在第二個例子中,我們得到的結果為, 1伸長了 8.2mm, 2增加 了 10.49mm, 3伸長了 28.47mm, 1增加了 6.198 度, 2減少了 12.25 度, 3減 少了 6.196 度,我們將所得到之結果與實際物理模型對照如下圖 2.5(c)所示。 Case3:在第三個例子中,我們執行當 = 100 sin(10𝓉) 𝓂𝓂 + 𝒽,並其其他 兩軸與姿態角都維持初始值時,求對應之三組桿長與三組旋轉角度。 Solution3:在第三個例子中,我們得到的結果為, 1、 2、 3分別做周期運 動,其結果如圖 2.5(d)、2.5(e)、2.5(f)所示, 1、 2、 3維持不變,如圖 2.5(g)、 2.5(h)、2.5(i)所示。 將所得之結果與實際物理觀察之推測結果相比,符合我們所推測之物理行為, 因此本論文所推導使都華平台之逆向運動學在趨勢上符合實際物理模型。 圖 2.5(a)逆向運動學 Simulink 模擬圖
圖 2.5(b)運動學模擬 Case1 結果圖
圖 2.5(d)運動學模擬 Case3 第一根伸縮軸結果圖
圖 2.5(f)運動學模擬 Case3 第三根伸縮軸結果圖
圖 2.5(h)運動學模擬 Case3 第二根旋轉軸結果圖
第三章
六自由度史都華平台動力學分析
本章節推導本論文使用之史都華平台的動力學方程式,並利用 MATLAB 模 擬軟體驗證了 Model 之正確性,未來將可利用此 Model 設計及分析適合此史都 華平台之控制法則。3.1 機器人動力學簡介
機器人的動力學方程與其運動學分類類似,亦分為順向與逆向,其定義分別 如下: 順向動力學(Forward Dynamic):給定驅動軸驅動力,求出對應之末端執行器 之位置、速度、加速度。 逆向動力學(Inverse Dynamic): 給定末端執行器之位置、速度、加速度,求 出對應之驅動軸驅動力。 在本論文使都華平台中,驅動軸驅動力即為三根伸縮軸驅動力與三根旋轉軸 驅動力,在此分別用 1、 2、 3、 4、 5、 6分別代表,而末端執行器位置、速 度、加速度,即為我們所定義平台之中心點三軸座標與三個姿態角的位置、速度 與加速度。 對與使都華平台而言,順向動力學方程可用於模擬其動態,並且用來測試設 計出之控制器對平台的響應行為,而逆向動力學方程則是史都華平台控制器設計 之基礎,大部分史都華平台之控制器皆由逆向動力學演變而來,在動力學模型基 礎上,可以對史都華平台之動力學性能進行分析,從而設計出高速度、高精度的 速度演算法。建構史都華平台動力學的方法,如第一章介紹所述,包括了 Newton-Euler 法和 Euler-Lagrange 法和 Virtual work 及 Kane 方程式等各種方法,但其中最多人 使用之兩種方法仍為 Newton-Euler 法和 Euler-Lagrange 法,而其中 Newton-Euler 法推導過程中需考慮結構之內力,較為繁雜,而 Euler-Lagrange 法,則可間接的 避開繁雜的內力來建構史都華平台的動力學方程,且雖然 Newton-Euler 法和 Euler-Lagrange 法所產生之模型最後為等效,但由 Euler-Lagrange 法所推導之模 型較為簡潔,更適合用於控制器設計,也因此相 Newton-Euler 法較為廣泛應用, 因此本論文最後採用 Euler-Lagrange 法來推導本論文所使用之史都華平台之動力 學。
3.2 尤拉-拉格朗日方程式介紹
∑ 𝔸( )𝒯𝜆 𝓀 =1 = 𝑑 𝑑𝓉( 𝜕 𝜕 ̇) − 𝜕 𝜕 + 𝜕 𝜕 ̇− ℚ ⋯ (3.1) 以 上 (3.1) 式 即 為 本 論 文 推 導 史 都 華 平 台 所 用 之 尤 拉 - 拉 格 朗 日 (Euler-Lagrange)方程式,其又稱為第一類拉格朗日方程(Lagrange equation of first type),與一般常用之第二類拉格朗日方程(Lagrange equation of second type)不同 之處,乃其引入了拉格朗日乘數(Lagrange multiplier)𝜆 ,代表的是一系統約束力 的大小,而其中𝒜𝒯 =∂Γ ∂ ,由系統拘束方程式對廣義座標偏微分而得,其中𝒜 𝒯代 表的是系統約束力的作用方向,而最後𝒜𝒯𝜆 代表的就是系統拘束所代表的拘束 內力,由於史都華平台並聯機構的特性,史都華平台鏈結上的關節之間,存在著 高度非線性偶合(Couple)的關係,因此若只使用第二類拉格朗日方程來推導史都 華平之動力學方程,相當於將史都華平台簡化視為開路之串聯機器人來推導,其 結果雖然能近似於真實史都華平台之模型,但因為未實際考慮真實史都華平台存 在之複雜偶合拘束,在需要較精確的模擬與控制上,仍不適用。 相對於第二類拉格朗日方程,第一類拉格朗日方程因能夠將史都華平台其鏈 結之間之拘束力,考慮進方程式內,因此間接能夠將真實史都華平台關節之間的 高度偶合,考慮進動力學模形之內,推導出之動力學模型,較為真實與準確,較 符合在模擬與控制上的需求,也因為第一類拉格朗日方程種種特性與優點,本論文最後使用此方法來推導本論文使用之史都華平台之動力學模型,推導出之動力 學模型分為順向與逆向,其中推導出之順向動力學為一高階非線性聯立微分方程 式,藉由模擬程式 MATLAB 等軟體,能夠解出給定輸入力矩,對應之上平台之 廣義座標之位置、速度與加速度隨時間變化圖,因此史都華平台之順向動力學多 用為觀察實際物理模型之動作形為以及用來測試控制器對系統之響應行為,而史 都華平台之逆向動力學,為一非線性聯立方程式,給定上平台之加速度、速度、 位置能夠得出對應之需要輸入之驅動軸力矩,由於逆向動力學能夠考慮史都華平 台系統動態,而得出之需求輸入力矩,所以多為用來當作控制器補償使用,其以 此逆向動力學為基礎衍伸出控制器又稱為反算力矩控制器,於史都華平台的控制 上非常重要。下節即利用本節所描述之第一類拉格朗日方程,推導本論文所使用 之史都華平台。
3.3 史都華平台動力學分析
以下對於本論文所使用之史都華平台,使用拉格朗日方程來推導,其中共可 分為幾大步驟,首先推出史都華平台此系統之拉格朗日函數 ,接著加入瑞利消 散函數,接著推導出史都華平台之拘束方程所構成之拘束內力,到此步驟,史都 華平台動力學模型之雛形已出現,但式子內仍擁有太多冗餘變數,因此最後一步, 使用 2.5 節所推導出之(2.8)式之雅可比速度矩陣,來簡化史都華平台之動力學模 型,最後整理所得即為我們所需要之史都華平台動力學模型,以下即針對各個步 驟分別推導以及描述。3.3.1 拉格朗日函數
Lagrange 函數是所有使用 Euler-Lagrange 方法推導模型之基礎,Lagrange 函 數為系統的動能與位能之差,其表示式為以下(3.2)式:
= 𝒯 − 𝒰 ⋯ (3.2)
對於史都華平台此類由多個剛體所構成之系統,其中𝒯代表著是平台各個構 件所表示之動能的總合,而𝒰為各個平台構件位能之總合。
其中𝒰表示為以下(3.3)式,其𝒰( )詳細內容請參考附錄章節。 𝒰 = 𝒰( ) ⋯ (3.3) 對於一個採用 n 個廣義座標來描述史都華平台之系統,其動能𝒯可表示為以 下(3.4)式: 𝒯 =1 2 ̇𝒯 ( ) ̇ ⋯ (3.4) 其中 = [𝓆1 ⋯ 𝓆𝓃]𝒯原始表示式為任意選取之廣義座標,𝓃為選取廣義 座標數,在此我們選取[ 𝓎 𝛼 𝛽 𝛾]𝒯與[ 1 2 3 1 2 3]𝒯 共 12 個廣義座標為表達式,即𝓃 = 12,用來描述史都華平台之動能與位能。 在選定廣義座標後, ̇ = [𝓆1̇ ⋯ 𝓆𝓃̇ ]𝒯表示史都華平台廣義座標速度向量, ( )是一個對稱正定矩陣,大小為𝓃 × 𝓃,稱做慣性矩陣,其各個分量的大小由 史都華平台個個構建之動力學參數和廣義座標向量 決定,在本論文使用之史都 華平台,表示為以下(3.5)式,其中ℳ 為上頂板之質量,ℳ ℓ為伸縮桿質量,ℐ𝜃為 旋轉軸轉動慣量,而其中的𝒜11⋯ 𝒜33,為史都華平台 3 個姿態角構成之一 3×3 矩陣,𝒰( )為由系統選定之廣義做標所表示的系統位能,將所得之𝒯與𝒰相減, 最後即得到 Lagrange 函數,對於 ( )與𝒰( )其詳細內容,由於表示式龐大,其 詳細內容請參考附錄章節,在此不加贅述。 ( ) = [ ℳ 0 0 0 0 0 0 0 0 0 0 0 0 ℳ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ℳ 0 0 0 0 0 0 0 0 0 0 𝒜11 𝒜21 𝒜31 0 0 0 0 0 0 0 𝒜12 𝒜22 𝒜32 0 0 0 0 0 0 0 𝒜13 𝒜23 𝒜33 0 0 0 0 0 0 0 0 0 0 ℳ ℓ 0 0 0 0 0 0 0 0 0 0 ℳ ℓ 0 0 0 0 0 0 0 0 0 0 ℳ ℓ 0 0 0 0 0 0 0 0 0 0 ℐ𝜃 0 0 0 0 0 0 0 0 0 0 ℐ𝜃 0 0 0 0 0 0 0 0 0 0 ℐ𝜃] ⋯ (3.5)
3.3.2 尤拉-拉格朗日方程
先不考慮拘束力部分,將上節所推導出 Lagrange 函數代入下列尤拉-拉格朗 日方程(3.6)式: 𝑑 𝑑𝓉( 𝜕 𝜕 ̇) − 𝜕 𝜕 + 𝜕 𝜕 ̇ = ℚ ⋯ (3.6) 最後可得到此一通式(3.7) : ( ̈) + ( ̇) + + 𝕂 = 𝕋 ⋯ (3.7) 其中 ( ̇) ∈ ℜ𝓃×𝓃為科氏力矩陣,其內容為以下(3.8)式, ∈ ℜ𝓃×1為重力矩 陣,表示式為以下(3.9)式,𝕂為 瑞利消散函數(dissipation function)對關節速度 廣義座標的偏微分,其代表著系統的阻尼特性,表示式為以下(3.10)式,𝕋代表對 廣義座標所輸加之外力,表示式為以下(3.11)式。 = ̇ −1 2 𝜕 𝜕 ( ̇𝒯 ) ⋯ (3.8) =∂𝒰 ∂ ⋯ (3.9) 𝕂 =𝜕 𝜕 ̇⋯ (3.9) 𝕋 = [ 1 ⋯ 𝓃] ⋯ (3.11) 其中 矩陣整理可得以下(3.12)式: ( ) = [ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ℬ11 ℬ21 ℬ31 0 0 0 0 0 0 0 ℬ12 ℬ22 ℬ32 0 0 0 0 0 0 0 ℬ13 ℬ23 ℬ33 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0] ⋯ (3.12) 整理可得如下(3.13)式:
= [0 0 0 0 0 ℳ ℊ 𝒟1 𝒟2 𝒟3 𝒟4 𝒟5 𝒟6]𝒯⋯ (3.13) (3.12)(3.13)式其中之ℬ11⋯ ℬ33及𝒟1⋯ 𝒟6請參考至附錄章節,在此不加贅述。 (3.7)中的動力學模型還有如以下性質成立: (1) 為對稱正定矩陣: 𝒯 = ⋯ (3.14) (2) − 2̇ 為反對稱矩陣: ( − 2̇ )𝒯= −( − 2̇ ) ⋯ (3.15) 推導至此(3.7)式即為史都華平台動力學之雛形,但(3.7)式並未考慮到史都華 平台廣義座標之間的拘束偶合關係,相當於用切割的方法,將平台之間的拘束關 係消去,將平台視為一開鏈機構,故為了描述平台進一步詳細的拘束偶合關係, 下一節將進一步引入拘束方程式來進一步推導更詳細之史都華平台動力學模 型。
3.3.3 加入拘束力描述
對於史都華平台而言,由於封閉鏈結的關係,各個關節間的運動並不是互相 獨力的,而是存在著嚴格的偶合關係,也因此在推導史都華平台的動力學模型時, 必須將此點考慮進去。 而由於史都華平台之間的關節偶合,在我們選取之廣義座標,必然也存在著 偶合關係,因此必須將此偶合關係考慮至方程式內。 史都華平台的關節拘束式,可以用一組關於廣義座標的代數方程式表現出來, 假設史都華平台具有 m 條閉鏈拘束條件,並且 = [𝓆1 ⋯ 𝓆𝓃]𝒯代表史都華平 台之廣義座標所組成之向量,則存在一組包含 m 個方程式的方程組描述史都華 平台之閉鏈拘束條件:ℍ( ) = [𝓀1(𝓆)⋮ 𝓀𝓂(𝓆)] = 0 ⋯ (3.16) 由於此閉鏈拘束的關係,史都華平台各廣義座標必須嚴格滿足(3.16)式,對 於一個具有 n 的廣義座標,m 條拘束條件的史都華平台而言,其運動自由度為 n-m,其中,將(3.16)式對時間微分,可以得到史都華平台的關節速度約束條件如 下式(3.17): ∂ℍ( ) ∂𝓉 = ∂ℍ( ) ∂ ̇ = 𝔸( ) ̇ = 0 ⋯ (3.17) (3.17)中𝔸( )的行向量代表著史都華平台廣義座標運動速度的約束方向,其 值為閉鏈約束方程式ℍ( )對廣義座標向量 的偏微分,在非奇異點處𝔸( )矩陣為 一滿秩矩陣,在(3.17)式約束下,史都華平台各個廣義座標之速度必須滿足(3.17) 式,將(3.17)式在對時間微分,可得到(3.18)式如下: 𝑑 𝑑𝓉(𝔸( ) ̇) = 𝔸 ̈ + 𝔸̇ ̇ = 0 ⋯ (3.18) 在(3.18)式約束下,史都華平台各個廣義座標之加速度必須滿足(3.18)式,其 中𝔸̇是速度約束矩陣𝔸對時間的微分。 由於(3.7)式之史都華平台動力學模型,並未考慮史都華平台各個廣義座標所 必須滿足的約束條件,因此我們必須在(3.7)式中額外加入𝔸( )𝒯𝜆 ,其代表的內 容為史都華平台廣義座標之間的約束內力,該作用力會保證史都華平台各個廣義 座標的位置、速度、加速度均滿足以上所推導之約束式(3.16)(3.17)(3.18)。 至此一個詳細考慮史都華平台廣義座標約束式之動力學模型可以得到如下: ̈ + ̇ + + 𝕂 = 𝕋 + 𝔸𝒯𝜆 ⋯ (3.19) (3.19)式雖然已為一完整表達史都華平台之動力學模型,但其方程式中存在 著許多冗餘之廣義座標速度變量,分析起來繁雜不易,因此為了簡化史都華平台 之動力學模型,我們必須用變量代換的方式,來簡化史都華動力學模型,而對於 n 個廣義座標 m 條拘束式的史都華平台,其運動自由度為 n-m,因此我們可以選
取 n-m 個獨立的變量,通過變量代換的方式,簡化(3.19)中的動力學模型,因此 於下一節將介紹選取獨立變量之兩種方法,並使用末端執行器廣義座標對驅動器 廣義做標的速度雅可比矩陣,來簡化(3.19)中的動力學模型。
3.3.4 變數代換簡化模型
一般常見的獨立變量選取方式為,選取一組獨立的速度變量,史其滿足(3.17) 式中的速度約束條件,然後通過變量代換方法,使其簡化動力學模型。 假設選取之獨立變量 = [ 1 ⋯ 𝓃−𝓂]𝒯,則變量代換關係如下: ̇ = ̇ ⋯ (3.20) (3.20)式為史都華平台廣義座標向量對所選取之獨立速度變量的關係式,其 中 為獨立速度座標對史都華平台廣義座標之速度雅可比矩陣,將(3.20)代入(3.17) 式中可得到下式(3.21): 𝔸 = 0 ⋯ (3.21) 由(3.21)可知,選取獨立變量之方法為在於其獨立變量關係式所產生之雅可 比矩陣 ,能夠滿足(3.21)式,以下為常見選取獨立速度座標的兩種方法,此兩中 方法皆能產生雅可比矩陣 滿足(3.21)式,進而做到變量代換,簡化(3.19)式的動 力學模型。 常見的方法為以下兩種: (1) 選取末端執行器座標做為獨立變量:選取末端執行器座標為一種常見之 方法,因為史都華平台的最後目的乃直接控制末端執行器的運動,因此 選擇此種方法擁有直觀且明瞭的優點。 (2) 選取主動關節座標做為獨立變量:選取主動關節座標做為獨立變量為另 外一種常見之方法,此種方法好處為,由感測器回授之訊號,不用再經 由運動學演算,可直接採用,進而減少控制過程的計算量。在此,本篇論文採用第一種方法,選取末端執行器獨立座標 做為變量代換 的應用,在此 內容如下式(3.22): = [ 𝓎 𝛼 𝛽 𝛾]𝒯⋯ (3.22) 而此組末端執行器之廣義做標與驅動器之關係式,即為 2.3 節所推導出(2.6) 及(2.7)式,將之整理可得如下(3.33)式: = 𝒻( ) ⋯ (3.33) 將(3.33)對時間微分,及可得到(3.34): ̇ =𝜕𝒻 𝜕 ̇ = ̇ ⋯ (3.34) 其中 =𝜕𝒻𝜕 ,即為 2.4 節所推導之(2.8)式內之速度雅可比矩陣。 在本論文史都華平台,其詳細內容為如下式(3.35): = [ 𝜕𝒻1 𝜕 ⋯ 𝜕𝒻1 𝜕𝛾 ⋮ ⋱ ⋮ 𝜕𝒻6 𝜕 ⋯ 𝜕𝒻6 𝜕𝛾 ] ⋯ (3.35) 其中矩陣內元素請參考附錄章節。 將(3.34)式代入(3.19)式最後可得到化簡後之史都華平台動力學模型(3.36)式 如下: ℯ ̈ + ℯ ̇ + ℯ + 𝕂ℯ = 𝕋ℯ⋯ (3.36) 其中 ℯ = 𝒯 ⋯ (3.37) ℯ = 𝒯 ̇ + 𝒯 ⋯ (3.38) ℯ = 𝒯 ⋯ (3.39)
𝕂ℯ = 𝒯𝕂 ⋯ (3.40) 𝕋ℯ = 𝒯𝕋 ⋯ (3.41) 其中 ̇ = [ 𝑑 𝑑𝓉( 𝜕𝒻1 𝜕 ) ⋯ 𝑑 𝑑𝓉( 𝜕𝒻1 𝜕𝛾) ⋮ ⋱ ⋮ 𝑑 𝑑𝓉( 𝜕𝒻6 𝜕 ) ⋯ 𝑑 𝑑𝓉( 𝜕𝒻6 𝜕𝛾)] ⋯ (3.42) 由於 𝒯為一(n-m)列 m 行之矩陣,因此(3.35)式動力學模型包含了(n-m)條方 程式,且可知其內容由 、 、𝕂、 、 、 ̇所組成,至此(3.35)即為我們最後所 需之史都華平台動力學模型的最後形式,其中 、 、𝕂、 、 、 ̇之矩陣詳細內 容請參考附錄章節。
3.3.5 總結
由於本論文所使用之史都華平台具有 12 個關節,並且和 6 條拘束方程式, 共擁有 6 個空間自由度,因此(3.36)式動力學模型應用於本論文之史都華平台, 擁有共 6 條方程式,12 個輸入變數,若給定 6 個輸入力矩,(3.36)式轉為一非線 性聯立方程式,藉由解 ODE 能夠得出對應之平台輸出變數,及為順向動力學, 反之給定上平板之廣義座標參數,(3.36)為一非線性聯立代數方程式,藉由演算 法可得到所對應之輸入力矩。 本論文將此最後形式以 MATLAB 模擬軟體解(3.35)之順向動力學,最後可解 出對應輸入力矩之末端執行器即上平板之廣義座標 的位置、速度、加速度變化, 在下一節,本論文即利用 MATLAB 模擬軟體,模擬(3.35)式之結果,並將此結果 與實際觀察之物理狀況做一討論與比較。3.3.6 模擬結果與討論
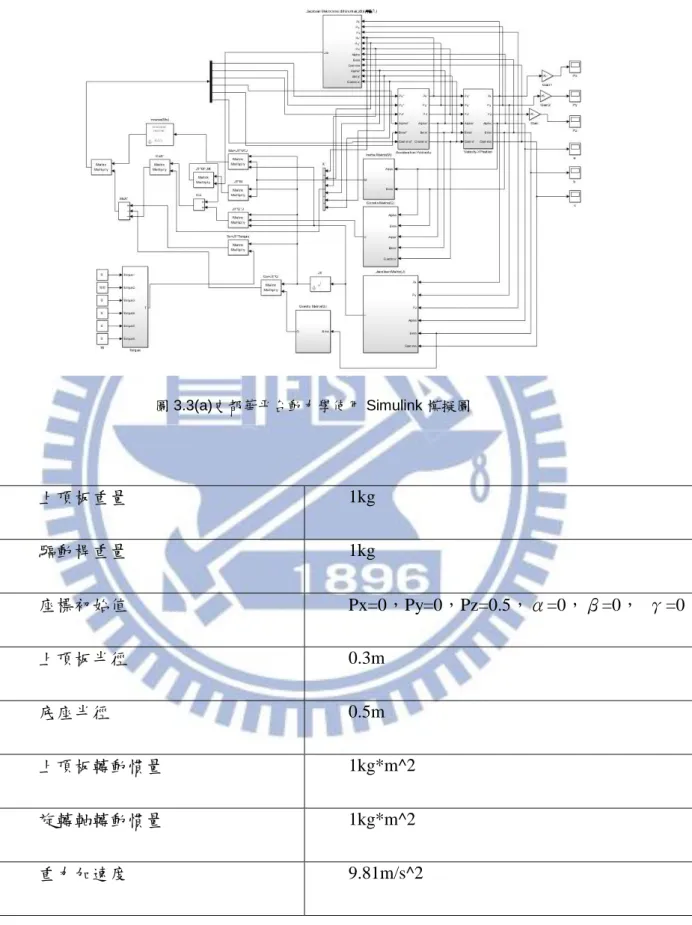
圖 3.3(a)為將(3.35)式利用 MATLAB 撰寫成程式之視圖,圖 3.3(b)模擬所使 用之參數,執行解 ODE 之動作,得出以下模擬結果,本論文分別將模擬結果分 為 4 個 Case 分別測試,測試狀況與結果分別如下: Case1:在第一個例子中,我們對第一根伸縮軸給予 10 牛頓.米的力矩,其 他軸則保持為零。 Solution1:其上頂板 3 軸座標反應圖分別如 3.3(d) 3.3(e) 3.3(f)所示,其中 Px 座標為增加,Py 座標為減少,Pz 座標為增加,其結果物理行為如圖 3.3(c)所示。 Case2:在第二個例子中,我們對第二根伸縮軸給予 10 牛頓.米的力矩,其 他軸則保持為零。 Solution2:其上頂板 3 軸座標反應圖分別如 3.3(h) 3.3(i) 3.3(j)所示,其中 Px 座標為減少,Py 維持不變,Pz 座標為增加,其結果物理行為如圖 3.3(g)所示。 Case3:在第三個例子中,我們對第三根伸縮軸給予 10 牛頓.米的力矩,其 他軸則保持為零。 Solution3:其上頂板 3 軸座標反應圖分別如 3.3(l) 3.3(m) 3.3(n)所示,其中 Px 座標為增加,Py 座標為增加,Pz 座標為增加,其結果物理行為如圖 3.3(j)所示。 Case4:在第四個例子中,我們對第一根、第二根、第三伸縮軸給予 10sin(t) 牛頓.米的力矩,其他軸則保持為零。 Solution4:其上頂板 3 軸座標反應圖分別如 3.3(p) 3.3(q) 3.3(r)所示,其中 Px 座標為做週期運動,Py 為持不動,Pz 座標為做週期運動,其結果物理行為如圖 3.3(o)所示。 將最後模擬結果與觀察之力物理現象相比,可知模擬結果在趨勢上符合物理 的觀察結果,因此本論文所推導之史都華平台之動力學模型,將可適用於替代真 實的實體來進行運動模擬,以及做為控制器設計的依據。
圖 3.3(a)史都華平台動力學使用 Simulink 模擬圖 上頂板重量 1kg 驅動桿重量 1kg 座標初始值 Px=0,Py=0,Pz=0.5,α=0,β=0, γ=0 上頂板半徑 0.3m 底座半徑 0.5m 上頂板轉動慣量 1kg*m^2 旋轉軸轉動慣量 1kg*m^2 重力加速度 9.81m/s^2 圖 3.3(b)史都華平台動力學模擬參數表
圖 3.3(c)動力學模擬 Case1 結果圖 圖 3.3(d)動力學模擬 Case1 Px 反應圖 0 1 2 3 4 5 6 7 8 9 10 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 Time (s) Px (m )
圖 3.3(e)動力學模擬 Case1 Py 反應圖 圖 3.3(f)動力學模擬 Case1 Pz 反應圖 0 1 2 3 4 5 6 7 8 9 10 -0.012 -0.01 -0.008 -0.006 -0.004 -0.002 0 Time (s) Py (m ) 0 1 2 3 4 5 6 7 8 9 10 0.5 0.52 0.54 0.56 0.58 0.6 0.62 0.64 Time (s) Pz (m )
圖 3.3(g)動力學模擬 Case2 結果圖 圖 3.3(h)動力學模擬 Case2 Px 反應圖 0 1 2 3 4 5 6 7 8 9 10 -0.16 -0.14 -0.12 -0.1 -0.08 -0.06 -0.04 -0.02 0 Time (s) Px (m )
圖 3.3(i)動力學模擬 Case2 Py 反應圖 圖 3.3(j)動力學模擬 Case2 Pz 反應圖 0 1 2 3 4 5 6 7 8 9 10 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Time (s) Py (m ) 0 1 2 3 4 5 6 7 8 9 10 0.5 0.52 0.54 0.56 0.58 0.6 0.62 Time (s) Pz (m )
圖 3.3(k)動力學模擬 Case3 結果圖 圖 3.3(l)動力學模擬 Case3 Px 反應圖 0 1 2 3 4 5 6 7 8 9 10 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 Time (s) Px (m )
圖 3.3(m)動力學模擬 Case3 Py 反應圖 圖 3.3(n)動力學模擬 Case3 Pz 反應圖 0 1 2 3 4 5 6 7 8 9 10 0 0.002 0.004 0.006 0.008 0.01 0.012 Time (s) Py (m ) 0 1 2 3 4 5 6 7 8 9 10 0.5 0.52 0.54 0.56 0.58 0.6 0.62 0.64 Time (s) Pz (m )
圖 3.3(o) 動力學模擬 Case4 結果圖 圖 3.3(p)動力學模擬 Case4 Px 反應圖 0 1 2 3 4 5 6 7 8 9 10 -0.5 0 0.5 1 1.5 2 2.5x 10 -5 Time (s) Px (m )
圖 3.3(q)動力學模擬 Case4 Py 反應圖 圖 3.3(r)動力學模擬 Case4 P4 反應圖 0 1 2 3 4 5 6 7 8 9 10 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Time (s) Py (m ) 0 1 2 3 4 5 6 7 8 9 10 0.48 0.5 0.52 0.54 0.56 0.58 0.6 0.62 0.64 0.66 Time (s) Pz (m )
第四章
驗證系統流程設計
本章及將進入驗證系統之設計,將第二章推導出之逆運動學應用於真實的史 都華平台上,結合各種硬體工具 Motion Card、DAQ Card 等,以及程式設計軟體 LABVIEW,設計出一感測器驗證系統。
4.1 設計目的
本章希望能夠結合各種工具,以及推導之史都華平台逆運動學方程式,設計 出一驗證系統,此驗證系統能夠讓使用者輸入上頂板之三軸的加速度時間曲線, 以及上頂板三組姿態角角速度時間曲線,而此驗證系統能夠根據使用者所輸入之 上頂板之加速度及角速度時間曲線,控制史都華平台上頂板跟隨使用者所輸入之 命令做動,達到使用者所要求的加速度及角速度命令,如此一來,及可藉由此套 系統,來創造出空間中六自由度的運動,以及空間中 3 軸的加速度以及角速度, 即可模擬出一類似於火箭飛行中的運動模式。 藉由此系統,未來於火箭實際發射前,即可將火箭所需乘載之運動感測器, 置放於此系統上頂板中心點上,並且輸入火箭飛行中的運動軌跡,或者加速度及 角速度等狀況,此系統上頂板即會產生相對應之動作,接著我們再將運動感測器 所獲得之資料取出,做出分析與比對,即可了解運動感測器在真實火箭發射過程 中,所應量測到之訊號,遭遇到之情況,亦可將感測器輸出與輸入命令做一比對, 即可了解此感測器正確性與否,以及精確度如何等等相關資訊,如此一來,本系 統即成為一火箭感測器驗證系統,未來,進行火箭實射之前的頻繁驗證程序,可 藉由此系統達到驗證的效果,如此可取代傳統將運動感測器攜至大型中心驗證的 一些流程,以減少整體火箭開發前的測試時間,提升火箭發射任務的效率。4.2 驗證系統流程規劃與設計
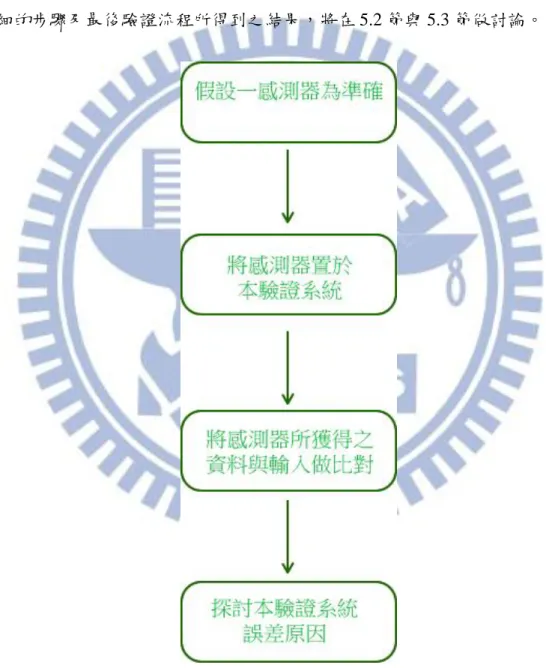
圖 4.2(a)為此驗證系統織設計流程圖,由圖可知,我們首先必須先設計一輸 入命令窗口,讓我們能夠輸入我們所需要之上平台加速度與角速度等資料,第二 階段必須設計一機制將此輸入之速度、角速度等命令轉為位置對時間曲線,第三 階段則需將此上頂板位置時間曲線轉換為史都華平台驅動軸之位置時間曲線,第 四階段則必須實現此驅動軸位置時間命令,此即為本論文設計之驗證系統之四個 階段,依序分別實現每個階段的設計,最後本論文驗證系統即可實現,而其中第 一與第二階段可藉由 LABVIEW 軟體創造出一輸入窗口,以及實現積分的功能 來完成設計,第三階段結合本論文第二章所推導之逆運動學與 LABVIEW 軟體 即可實現,最後一階段,利用 NI 的運動控制卡與 LABVIEW 軟體即可實現。 圖 4.2(a)感測器驗證系統設計流程圖圖 4.2(b)為本論文在完成此驗證系統設計以及實現後之測試流程圖,由於不 確定我們所設計之驗證系統是否有如我們所設計,產生與輸入命令相同之上頂板 加速度與角速度曲線,在實際應用之前,我們必須設計一驗證流程,以檢查此系 統之正確性,以及探討與發現此系統之缺失,如圖所示,我們首先必須假設一感 測器為正確,將此感測器當做基準值,當此驗證系統完成後,將此感測器置於此 系統,執行此系統,輸入加速度與角速度等命令,最後我們將此基準感測器所獲 得之資料與我們所輸入之命令做一比較,已確定此驗證系統是否能如我們所預期, 詳細的步驟及最後驗證流程所得到之結果,將在 5.2 節與 5.3 節做討論。 圖 4.2(b)感測器驗證系統驗證流程圖
第五章
器驗證系統實現
於第四章我們設計了本論文驗證系統之流程、以及實現驗證系統後的測試流 程,以及提到實現此驗證系統流程的工具以及方法,在本章我們即要使用這些的 工具與方法,將本論文的設計一一實現,但在實現之前,我們會將實現設計的所 需工具一一做些簡略介紹,因此本章於 5.1 節內容即先介紹這些我們實現設計所 需的工具,接著在於 5.2 節將介紹詳細的實現驗證系統流程設計的過程,最後將 實現的結果展現,最後於 5.3 節我們將依據 4.2 節所設計之用來測試此驗證系統 證確性之方法實現,並將測試此驗證系統,最後 5.4 節我們將 5.3 節所測試之結 果做一討論,檢討本驗證系統之缺失。5.1 實現驗證系統使用之設備簡介
本節即開始介紹本論文實現驗證系統設計所需要之所有硬體設備與軟體,包 含 LABVIEW 軟體、史都華平台、NI Motion Card、NI DAQ Card、IMU 等等。5.1.1 史都華平台
本論文所設計之驗證系統以史都華平台為基礎,自然必須先了解此史都華平 台之硬體規格與資料,因此在本節,首先詳細介紹本論文所使用之史都華平台之 資料與規格。 首先圖 5.1(a)為本論文所使用之史都華平台所有的設備圖,由左至右為史都 華平台、控制箱、PC 電腦。 本論文所使用之史都華平台必須藉由一控制箱與 PC 電腦相連,由使用者對 電腦下命令,此命令將傳至控制箱,而控制箱則將接收到之命令做處理,進而控 制伺服馬達,由此可知控制箱為此史都華平台重要的控制中樞,圖 5.1(b)即為控制箱之全圖,圖 5.1(c)則為控制箱之正面圖,如圖所示,其控制面板上擁有各式 開關,為操作史都華平台與一些安全指示訊息的集合,其詳細內容可參考[21] 。 圖 5.1(d)為控制箱背面圖,圖上各個插孔分別為連接至史都華平台之馬達的 控制訊號現與 Encoder 線等等,其平台背面亦有如控制箱一樣之插孔,藉由連接 線將史都華平台與控制箱相連,值得注意的是,此插孔分別有與知對應之接孔, 不可插錯,若差孔之間對應錯誤,輕則造成平台錯誤的行為,重則造成機構損毀, 不可不慎。 圖 5.1(e)為史都華平台直線軸極限感測元件,如圖所示,在圖中圈起來之地 方表示為直線軸所使用的極限感測器,由上往下依序為:上極限、原點極限、下 極限。圖中亮紅燈的表示目前直線軸連桿的位置,位於該感測器的感應範圍內。 未亮表示在,感應範圍之外。由其所亮的位置可以知道,該直線軸的可變行程內 桿目前的位置所在。此史都華平台於直線軸安裝直線軸極限感測元件的功用為, 用來做直線軸大略位置的檢測以及利用極限偵測保護電路的輔助,來達到直線軸 機構及馬達的保護。 以上即為本論文所使用之史都華平台之硬體與操做資訊大略之介紹,詳細資 料可進一步參考[21][22],於下節將介紹本論文安裝於電腦上用以操作史都華平 台之運動控制卡。 圖 5.1(a)史都華平台所有設備圖
圖 5.1(b)史都華平台之控制箱圖
圖 5.1(c)史都華平台之控制箱正面面板圖
圖 5.1(e)史都華平台之感測原件圖
5.1.2 運動控制卡
本 論 文 所 使 用 之 運 動 控 制 卡 為 國 家 儀 器 (Native Instruments) 所 生 產 之 PCI-7356 運動控制卡,其圖如下 5.1(f),NI PCI-7356,屬於 NI 最新、最高效能 的 6 軸運動控制器系列,用於各種簡易或複雜的運動控制應用,NI PCI-7356 亦
具備 8 組 16 位元類比數位轉換器 (ADC) 可快速擷取資料,並具備運動控制 軌跡與觸發的進階功能。另項新功能為正弦波整流,可建立無刷馬達控制器。 PCI-7356 運動控制卡可使用包括 C 與言、C++、LABVIEW 等各種程式語言 來編程,並且內建 PID 控制器,其最高 PID 速率最高可同時兩軸達到 62.5 μs。 對於 PCI-7356,期配合於 LABVIE 軟體與專屬之 NI 73XX 函式庫可輕易的 驅動馬達做出各種想要的指令,其函式庫如圖 5.1(h)所示,其中有各種運動模式 可使用,7356 配合 73XX 函式庫支援包含簡單點對點直線運動(Straight-Line Moves),圓弧運動(Arc Moves),軌跡混合運動(Blended Moves),軌跡追蹤運動 (Contoured Moves),電子傳動運動(Electronic Gearing)等等各種運動模式,其中我 們將利用 PCI-7356 中的 Contoured Moves 來驅使史都華平台之伺服馬達來運動, 期示意圖如 5.1(g)所示,Contoured Moves 模式能夠運用 LABVIEW 程式與 PCI-7356 的配合,控制伺服馬達依照我們所規劃之時間曲線來運動,透過軌跡 追蹤(Contouring),即可構成位置緩衝區 (Position buffer),並建立平滑的路徑或 曲線 (Spline),軌跡追蹤可確保系統通過各個位置,因此創造出曲線較能夠接近 我們所下予之命令。
關於更詳細之 PCI-7356 控制卡內容可參考[23],下一節將介紹 NI 的 DAQ Card 的硬體規格與使用資訊。
圖 5.1(g)運動控制卡 Contoured Moves 示意圖
5.1.3 資料擷取卡
本論文在完成整體驗證系統設計實現後,將進行系統驗證,此流程需要一能 夠實現 AD 功能將感測器資料擷取出之硬體設備,本論文所使用之設備為 NI PXIe-6363 資料擷取卡。
NI PXIe-6363 為 NI X 系列多功能資料擷取(DAQ)卡,具備高傳輸量的 PCI Express 匯流排、NI-STC3 時序與同步化技術,還有最佳化的多核心驅動程式與 應用軟體,NI PXIe-636 為擁有 32 個類比輸入通道,16bit 解析度,輸入範圍±10 V 的 DAQ Card,符合本論文所設計驗證程序的需求,且將 NI PXIe-6363 與 LABVIEW 程式的 DAQ 小幫手(DAQ Assistant)將可快速進行應用與開發,相比 傳統減使用 DSP 與其他單晶片進行 AD 取樣功能,使用 NI PXIe-6363 搭配 DAQ 小幫手開發速度快上許多,能夠減少傳統開發上的號時,下圖 5.1(i)即為 NI PXIe-6363 視圖,圖 5.1(k)則為 LABVIEW 中 DAQ 小幫手的示意圖。
此外 NI PXIe-6363 雖然方便使用,單必須搭配 NI所專屬之控制箱方能使用, 本論文所使用之 NI 控制箱為 NI PXIe 1082,如圖 5.1(j)所示。
關於 PXIe-6363 更詳細內容可參考[24],下一節將介紹本論文所使用之運動 感測器。
圖 5.1(j) NI PXIe-1082 視圖
5.1.4 感測器
本節介紹本論文所用來做為測驗驗證系統,當做基準值之感測器,我們所使 用之感測器為美國 MEMSENSE 公司所出的 AccelRate3D,AccelRate3D 為一慣 性量測單元(Inertial measurement unit),簡稱 IMU,其功能為可以量測 3 軸的加 速度,與三軸之角速度。 本論文所使用之 AccelRate3D 型號為 AR10,其最高可接受±10g 之加速度, 與±1200°/s 之角速度,頻寬為 50HZ,輸入電壓為 5V,低耗功,低雜訊,適合應 用 於 高 速 運 動 體 的 加 速 度 與 角 速 度 量 測 , 下 圖 5.1(l) 即 為 本 論 文 使 用 之 AccelRate3D 視圖,更詳細之 AccelRate3D 內容請參考[25]。 圖 5.1(l) AccelRate3D 視圖
5.1.5 程式軟體
本節介紹本論文用來實現驗證系統與控制馬達之程式軟體,雖然本論文所設 計之驗證平台與馬達控制能夠用各種與言包括 C、C++、Basic 等實現,但本論 文最後使用來開發以及實驗驗證系統與控制馬達之與言為國家儀器簡稱 NI 所出 之 LABVIEW 圖控語言,其原因為雖然使用 C 語言有移植性高等優勢,但由於 本論文實驗所使用之設備多為 NI 所出產,包括資料擷取卡 PXIe-6363 與運動控 制卡 PCI-7356,因此使用 LABVIEW 與之配合,其相較於使用 C 與言等其他與 言,有開發速度較快,介面化等優點,因此本論文最後使用 LABVIEW 圖控軟 體搭配 NI 的各項硬體來實現本論文設計的驗證系統。以下為關於 LABVIEW 程式語言的相關介紹,LABVIEW(Laboratory Virtual Instrumentation Engineering Workbench,實驗室虛擬儀器工程平台)是由美國國 家儀器公司所開發的圖形化程式編譯平台,其發明者為傑夫·考度斯基,程式最 初於 1986 年在蘋果電腦上發表。LABVIEW 早期是為了儀器自動控制所設計, 至今轉變成為一種逐漸成熟的高階程式語言。圖形化程式與傳統程式語言之不同 點在於程式流程採用"資料流"之概念打破傳統之思維模式,使得程式設計者在流 程圖構思完畢的同時也完成了程式的撰寫,LABVIEW,也被稱為 G 語言,是一 種資料流程式語言。程式設計師透過繪製導線連線不同功能的節點,圖形化的程 式框圖(LV 原始碼)結構決定程 式如何執行。這些線傳遞變數,所有的輸入資 料都準備好之後,節點便馬上執行。這可能出現同時使用多個節點的情況,G 語 言天生地具有並列執行能力。內建的排 程演算法自動使用多處理器和多執行緒 硬體,可以跨平台地在可執行的節點上復用執行緒。 LABVIEW 的程式檔名稱為.vi,其程式接為由一控制面板與與程式面板組成, 開發者在程式面板內撰寫程式,對應開發者所撰寫之程式所對應之人機介面及會 自動顯示於控制面板,讓使用這操作,這相比於傳統使用 C 與言等來開發人機 介面,速度上大幅提升,此外 LABVIEW 亦提供與外部程式連節之功能,使開 發者亦能於 LABVIEW 中使用 C 與言、MATLAB、JAVA 等各類其它與言來開發 程式。