國立交通大學
資訊科學與工程研究所
碩 士 論 文
基於區域可變式視窗大小和
適應性權重的視差估計演算法
Region-Based Variable Window Size with Adaptive Support
Weight for Disparity Estimation Algorithm
研 究 生:黃致遠
指導教授:蔡文錦 教授
基於區域可變式視窗大小和適應性權重的視差估計演算法
Region-Based Variable Window Size with Adaptive Support Weight for
Disparity Estimation Algorithm
研 究 生:黃致遠 Student:Chih-Yuan Huang
指導教授:蔡文錦 Advisor:Wen-Jiin Tsai
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
December 2012
Hsinchu, Taiwan, Republic of China
i
中文摘要
立體視差估計演算法被廣泛的利用在許多實際應用層面,像是 3D 視訊會議 和多視角立體電視等。在一個典型的地區式視差估計演算法當中,通常會使用一 個固定的視窗大小來聚合視差匹配的代價。然而,越大的視窗大小雖然能提升在 低紋理區塊的表現,卻也同時讓視差的邊界被模糊化。 在本篇論文中,我們提出了一個可變動的視窗大小,先利用顏色資訊把圖片 連結或切割成多個區塊,再利用區塊的資訊來決定視窗的大小,同時在最後的優 化步驟,這些資訊也能用在一個十字區域式表決機制。另外,為了讓計算結果的 品質更加提升,我們更結合了微型普查(mini-census)和顏色差距的比對方式。 從實驗結果顯示,我們的方法能夠有效提升原本方法的效能,而且經由 Middlebury 網站的評估,我們的方法是目前的地區式演算法當中名列前茅的。 關鍵字:視差估計、可變動視窗大小、區塊分割ii
ABSTRACT
Stereo matching algorithm has been widely adopted by various stereo vision
applications such as 3D video conference and free viewpoint TV. In the typical local
methods for stereo matching, a fixed support window size is often adopted in cost
aggregation step. Larger supporting window can improve the stereo matching
performance at low texture regions. However, it is blurred near depth discontinuities.
In this paper, we propose a variable window size selection strategy before cost
aggregation step. The strategy determines the support window by utilizing the
segment information derived from a color based segmentation method. This
information is also used for region-based cross voting scheme in refinement step.
Moreover, a combined matching cost measure with mini-census and color difference
is proposed. Experimental results show that the proposed method effectively improves
the performance of original method. According the performance evaluation at the
Middlebury website, the proposed method is one of the current state-of-the-art local
methods.
iii
誌謝
在這兩年多的研究所生涯中,能完成我的碩士論文,首先最要感謝的就是我 的指導教授蔡文錦博士。在學業研究上,孜孜不倦地與我討論各種相關的議題, 點出我研究上的盲點,引導我前往正確的方向;在日常生活中,不時的關心我並 且給予我前進的力量。在此向我最敬愛的指導教授蔡文錦博士,致上最高的敬 意。 我要感謝實驗室的學長姐,吳佳穎、呂威漢、張育誠、謝寧靜、孫域晨、詹 家欣,謝謝你們指導我各種研究上的相關知識。另外要感謝我的同學們,蕭成憲、 楊巧安、林宗翰,謝謝你們陪伴我度過這段追求知識的過程,課程上的互相砥礪, 生活中的互相打氣,讓我從你們身上獲益良多。還有謝謝學弟們,王敬嚴、林建 儒、胡振達、高彬倬、邱柏瑞、劉翊士,謝謝你們讓我在研究所生涯中過得更加 精彩,祝福你們順利畢業。 最重要的,感謝我的家人,尤其是我的父母親,在背後默默支持我,讓我在 疲憊的時候有一個溫暖的避風港,謝謝你們對我的期待及付出。 接下來就要告別學生生涯進入職場了,大家珍重。 謹以此論文獻給我的師長、家人及所有關心我的朋友們iv
CONTENTS
中文摘要... i ABSTRACT ... ii 誌謝... iii CONTENTS ... iv LIST OF FIGURE ... viLIST OF TABLE... viii
Chapter 1 Introduction ... 1
Chapter 2 Related Work ... 7
2.1 Adaptive Support Weight Approach ... 7
2.2 Segmentation-Based Adaptive Support Weight ... 8
2.3 Mini-Census Adaptive Support Weight ... 9
2.3.1 Mini-Census Transform and Matching ... 10
2.3.2 Weight Generation ... 11
2.3.3 Two-pass Cost Aggregation ... 12
Chapter 3 Proposed Method ... 14
3.1 Motivation ... 14
3.2 The flow of the proposed method ... 16
v
3.4 Weight generation and truncation ... 18
3.5 Support window size selection... 19
3.5.1 Image segmentaion ... 19
3.5.2 Variable window size selection ... 20
3.6 Two-pass cost aggregation ... 22
3.7 Disparity refinement ... 22
3.7.1 Left-right check and Outliers classification ... 23
3.7.2 Outlier refinement ... 24
3.7.3 Region-based cross voting ... 25
Chapter 4 Experimental Results ... 26
4.1 Evaluation of the robust matching cost measure ... 26
4.2 Compare the intermediate results of proposed method ... 28
4.3 Compare with the reference works ... 31
4.4 Compare with state-of-the-art methods ... 31
Chapter 5 Conclusion ... 38
vi
LIST OF FIGURE
Figure 1-1 A general flow of stereo matching algorithm. ... 1
Figure 1-2 A cost aggregation in pixel p with its neighbors i ... 3
Figure 1-3 A 3x3 median filter ... 4
Figure 2-1 A symmetrical cost aggregation... 7
Figure 2-2 A example for the segmentation-based adaptive weight generation ... 9
Figure 2-3 The mini-census transform and matching introduced in [9]... 10
Figure 2-4 Two-pass cost aggregation... 12
Figure 3-1 The performance comparison with different window size ... 15
Figure 3-2 The flow of the proposed algorithm ... 16
Figure 3-3 The curve of our proposed weight function... 19
Figure 3-4 The left image and the segmentation result of 4 stereo images ... 21
Figure 3-5 The classification results(left) and the occluded-region in the ground truth(right) ... 24
Figure 3-6 Region-based cross voting ... 25
Figure 4-1 The averaged error rate in different cost measure (w means the support window size) ... 27
Figure 4-2 The error percentages of different error measures for 4 methods by our implementation ... 29
vii
Figure 4-3 The error percentages of different error measures for 4 test stereo pairs
obtained from different methods ... 33
Figure 4-4 The disparity maps and the corresponding error map of our proposed
method and related methods on Teddy sequence ... 34
Figure 4-5 The disparity maps and the corresponding error map of our proposed
method and related methods on Venus sequence ... 35
Figure 4-6 The disparity maps and the corresponding error map of our proposed
method and related methods on Tsukuba sequence ... 36
Figure 4-7 The disparity maps and the corresponding error map of our proposed
viii
LIST OF TABLE
Table I Parameter settings for the Middlebury evaluation ... 26
Table II Compared the results obtained from different step in the proposed
algorithm ... 30
Table III Comparison between proposed method and the related works using
winner-take-all before refinement step ... 30
Table IV Quantitative Middlebury evaluation of the propose method and the
1
Chapter 1 Introduction
Stereo matching is one of the most actively studied topics in computer vision.
The issue is to estimate the disparity map from a pair of rectified images of the same
scene taken from different viewpoints. The disparity of a pixel is the displacement
vector between corresponding pixels which horizontally shift from the left image to
the right image. The process of finding the disparity is referred as stereo matching or
disparity estimation. In recent years, a large number of algorithms have been
proposed to solve the problem. The stereo matching algorithm has been widely
adopted by applications such as 3D video conference and free viewpoint TV [1]. It
will continue to be an attractive topic with the development of 3D video market in the
next few years.
According to the work published by Scharstein and Szeliski [2], a stereo
matching algorithm generally consists of the following four steps: matching cost
computation, cost (support) aggregation, disparity computation and disparity
refinement. Figure 1-1 depicts the flow of a stereo matching algorithm.
Figure 1-1 A general flow of stereo matching algorithm.
Matching cost computation Cost aggregation Disparity computation Disparity refinement
2
The first step computes the initial matching costs of all disparity candidates for
each pixel by the cost measure, such as absolute difference (AD), gradient-based
measures, and non-parametric transforms like rank and census [3]. Among these
measures, the AD cost is the most commonly used for many stereo matching methods
due to its simplicity. The AD cost in RGB color space of a pixel p with respect to a
disparity d can be defined as:
𝐶 (𝑝, 𝑑) = ∑ { , , }|𝐼 (𝑝) − 𝐼 (𝑞)|
Where IL and IR represent the left and right images. The AD cost evaluating the
matching penalty seems intuitive; however, it has poor quality for global radiometric
changes. In a recent experiment by Hirschmϋller and Scharstein [4], the census
transform performs the best overall results in stereo matching methods, since the
match metrics compare the relative orderings instead of the intensity of the pixels.
Second, the cost aggregation step gathers the costs in a support window which is
usually a square window. A simple hypothesis of the cost aggregation is that
surrounding pixels with similar colors should be greatly correlated to the center pixel.
An aggregated cost of pixel p can be calculated by the following function: 𝐶𝑎𝑔𝑔(𝑝, 𝑑) = ∑ 𝑊𝐿𝑐𝑜𝑠𝑡(𝑖, 𝑑)× 𝑤(𝑝, 𝑖)
∑ 𝑊𝐿𝑤(𝑝, 𝑖)
Where cost(i) means the initial matching cost obtained from the previous step. In
addition, w(p, i) represents the related weight between the pixel p and its neighbors i (1)
3
in current support windowWL. A simple schematic diagram of cost aggregation is
depicted in Figure 1-2. The cost aggregation reduces the matching ambiguities and
noise in the initial cost volume due to lack of more information.
Figure 1-2 A cost aggregation in pixel p with its neighbors i
With the aggregated costs, the disparity map can be simply computed by the
winner-take-all (WTA) process, which is to select the disparity candidate with the
minimal aggregated cost. The WTA method can be expressed as D(p) = arg min
d Cagg(p, d)
, where d is the disparity candidate over a disparity search range. Another
optimization method such as graph-cut is introduced by Boykov et al. in [5].
Finally, the disparity refinement step further refines the disparity by correcting
the error caused by the outlier pixels or image noise. A simple refinement tool is a 3x3
median filter. Figure 1-3 represents how a median filter works. In addition, left-right
consistency check [6] is an effective refinement technique to deal with the occluded
region. We will introduce it later in 3.7.1.
4
Figure 1-3 A 3x3 median filter
With the above steps, the disparity estimation algorithms can be roughly
classified into two types: local algorithms and global algorithms. Local methods focus
on the matching cost computation step and the cost aggregation step. Instead, global
methods emphasize on the disparity computation step.
Local algorithms estimate the disparity of each pixel independently within a
support window. The matching costs are aggregated over the window, after that, the
disparity candidate with the minimal cost is simply selected for the pixel by the WTA
rule. The local algorithms have low computation complexity and storage requirement,
so they are generally adopted by real-time applications. Recent research has proved
that a well-selected support window can give a quality result. The local approach with
the adaptive support weight (ADSW) is proposed by Yoon et al. [7] , which can
achieve the goal to apply a support window of arbitrary shape. Therefore, the ADSW
can have the comparable result approaching to the global method with considerable
execution time. Later, Tombari et al. proposed a segment-based support method [8] to
5
segmentation information. Recently, the mini-census adaptive support weight
approach (MCADSW) [9] is accomplished to have lower complexity and more
capability of handling brightness bias problems than the original ADSW.
On the other hand, the cost aggregation step is simple in global algorithms.
Instead, the emphasis is on the disparity computation step. Global approaches
formulate the stereo matching problem as the objective energy function and
minimize it to determine the disparity map. The energy functions often include data
term and a neighboring term. Some efficient optimizers like graph-cut [5] and belief
propagation are employed to minimize the energy function. A cooperative
optimization based on region segment proposed by Wang and Zheng [10] is the
state-of-art of global approach according to the Middlebury evaluation [11]. This
algorithm uses regions as matching objects and defines the corresponding energy
function with the constraints on data term, smoothness, and occlusion. Consequently,
global methods produce more accurate results than common local methods, but they
suffer from high computational complexity and can hardly be used in real-time
implementation.
The proposed algorithm in this thesis is focused on local algorithms. We
modified the MCADSW [9] algorithm by adopting a robust matching cost measure
6
aggregation. Moreover, the region information can also be used in our region-based
cross voting scheme to improve the quality of the disparity refinement result.
The rest of this thesis is organized as follows. Section 2 introduced the details of
the related works about local stereo matching methods. Section 3 describes our
motivation and the proposed algorithm step by step. The experimental results are
7
Chapter 2 Related Work
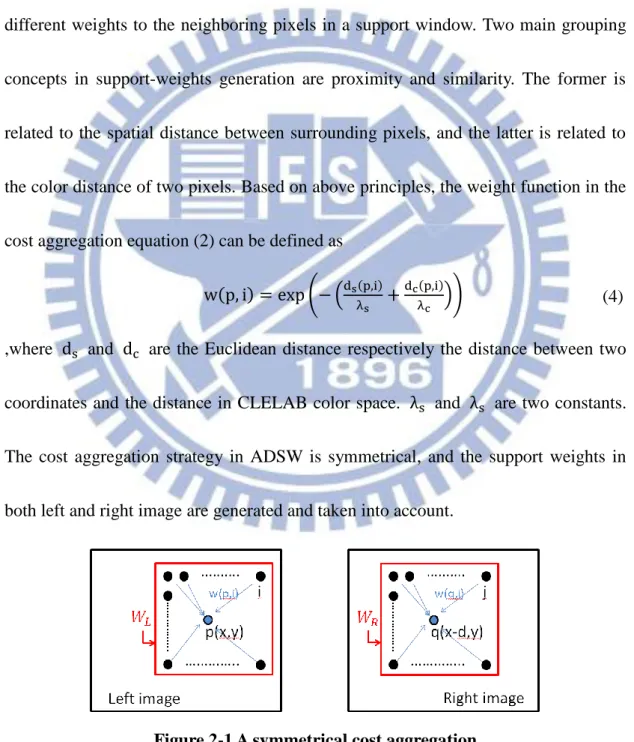
2.1 Adaptive Support Weight Approach
Yoon proposed the concept of adaptive support weight (ADSW) [7] that assigned
different weights to the neighboring pixels in a support window. Two main grouping
concepts in support-weights generation are proximity and similarity. The former is
related to the spatial distance between surrounding pixels, and the latter is related to
the color distance of two pixels. Based on above principles, the weight function in the
cost aggregation equation (2) can be defined as
w(p, i) = exp (− (ds(p,i)
λs +
dc(p,i)
λc ))
,where ds and dc are the Euclidean distance respectively the distance between two
coordinates and the distance in CLELAB color space. λs and λs are two constants.
The cost aggregation strategy in ADSW is symmetrical, and the support weights in
both left and right image are generated and taken into account.
Figure 2-1 A symmetrical cost aggregation
8
Figure 2-1 describes the symmetrical cost aggregation diagram. Let p and q be
respectively the center pixels in the current support window WL in the left image and
the support window WR in the right image. Then, the cost aggregation is rewritten as
following
𝐶
𝑎𝑔𝑔(𝑝, 𝑑) =
∑𝑖 𝑊𝐿,𝑗 𝑊𝑅𝑇 ( ,𝑗)×𝑤(𝑝, )×𝑤(q,j)∑𝑖 𝑊𝐿,𝑗 𝑊𝑅𝑤(𝑝, )×𝑤(𝑞,𝑗)
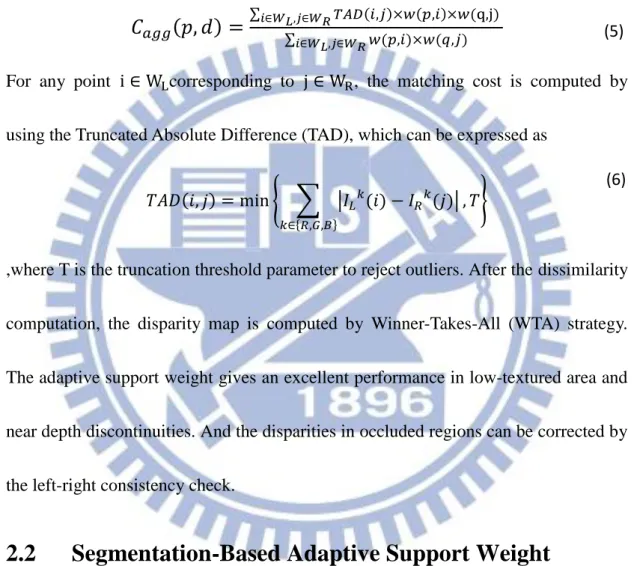
For any point i WLcorresponding to j WR, the matching cost is computed by
using the Truncated Absolute Difference (TAD), which can be expressed as
𝑇𝐴𝐷(𝑖, 𝑗) = min { ∑ |𝐼 (𝑖) − 𝐼 (𝑗)|
{ , , }
, 𝑇}
,where T is the truncation threshold parameter to reject outliers. After the dissimilarity
computation, the disparity map is computed by Winner-Takes-All (WTA) strategy.
The adaptive support weight gives an excellent performance in low-textured area and
near depth discontinuities. And the disparities in occluded regions can be corrected by
the left-right consistency check.
2.2 Segmentation-Based Adaptive Support Weight
In [8], Tombari et al. analysis the result obtained by the ADSW method. There
are some drawbacks in high-textured surfaces and repetitive patterns, since the
amount of aggregated support in ADSW may be insufficient in these regions. This is
because the use of spatial distance would determine the wrong support.
(5)
9
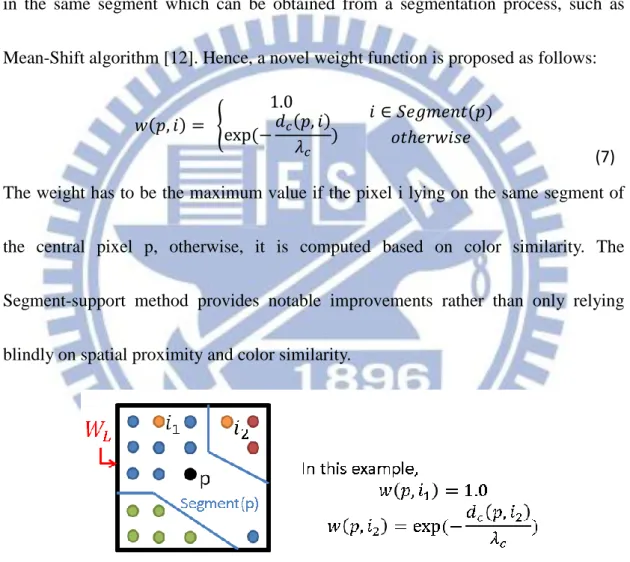
The basic idea of segmentation-based adaptive support is to embody the concept
of color similarity as well as segmentation information to improve the capability of
the support window. The proximity term has been eliminated from the support weight
computation. Instead, it is assumed that the disparity of each pixel has a similar value
in the same segment which can be obtained from a segmentation process, such as
Mean-Shift algorithm [12]. Hence, a novel weight function is proposed as follows:
𝑤(𝑝, 𝑖) = { 1.0 exp (−𝑑𝑐(𝑝, 𝑖) 𝜆𝑐 ) 𝑖 𝑆𝑒𝑔𝑚𝑒𝑛𝑡(𝑝) 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
The weight has to be the maximum value if the pixel i lying on the same segment of
the central pixel p, otherwise, it is computed based on color similarity. The
Segment-support method provides notable improvements rather than only relying
blindly on spatial proximity and color similarity.
Figure 2-2 A example for the segmentation-based adaptive weight generation
2.3 Mini-Census Adaptive Support Weight
The mini-census adaptive support weight method (MCADSW) [9] is an effective
algorithm modified from the ADSW method, and the former one has much lower (7)
10
complexity and more capability of dealing with brightness problem. The MCADSW
adopted the mini-census transform to improve the robustness to radiometric distortion.
Because mini-census cost measure has only relative information, a
scale-and-truncated approximation of the weight function is proposed. In addition, the
two-pass approach not only reduces computation complexity but also derives good
performance in low-texture areas.
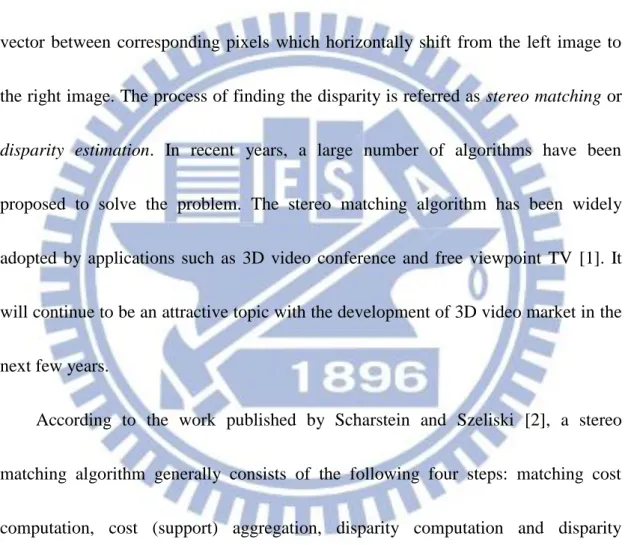
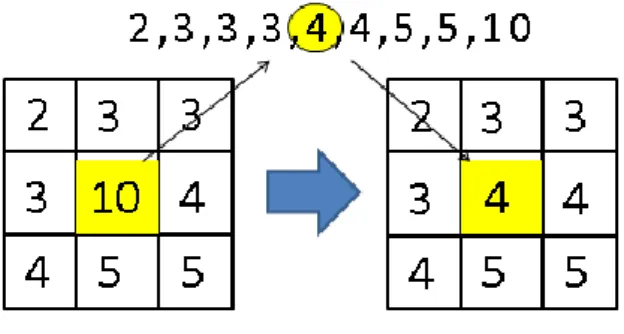
Figure 2-3 The mini-census transform and matching introduced in [9]
2.3.1 Mini-Census Transform and Matching
The concept of original census transform [3] is to obtain relative information instead of the intensity itself. The intensity used to compare is first transformed into Y color space. If a pixel’s intensity is larger than the center pixel’s intensity, it is
11
compares the intensity of the 6 significant pixels with the center pixel. After the
transformation, each pixel can be represented as a 6-bit binary bitstream. The
mini-census cost between the corresponding pixels is taken as the hamming distance
between two mini-census bitstreams, which is defines as 𝐶 𝑐(𝑝, 𝑑) = 𝑚( (𝑝), (𝑝 − 𝑑))
,where 𝐶 𝑐 represents the mini-census cost of pixel p with the disparity level d.
Ham() is the hamming distance function. (𝑝) and (𝑝 − 𝑑) are referred as the
bitstream of current pixel in the left image and the bistream of corresponding pixel in
the right image, respectively. An example of the mini-census transform and matching
introduced in [9] is shown in Figure 2-3. The mini-census cost performs better
disparity result in occluded area than the traditional SAD does.
2.3.2 Weight Generation
The weight function in the MCADSW method also eliminates the proximity
weight. Moreover, a scale-and-quantize weight function is defined as 𝑤(𝑝, 𝑖) = 𝑞 𝑛𝑡𝑖 𝑒 [𝑒 𝑝 (− (𝑝, )) × 𝑠𝑐 𝑖𝑛𝑔 𝑐𝑡𝑜𝑟]
The weight function is scaled up by 64 and quantized to leave only one nonzero most
significant bit. The purpose of scaling the function is to increase the influence of
neighbor pixel which has the small color distance.
(8)
12
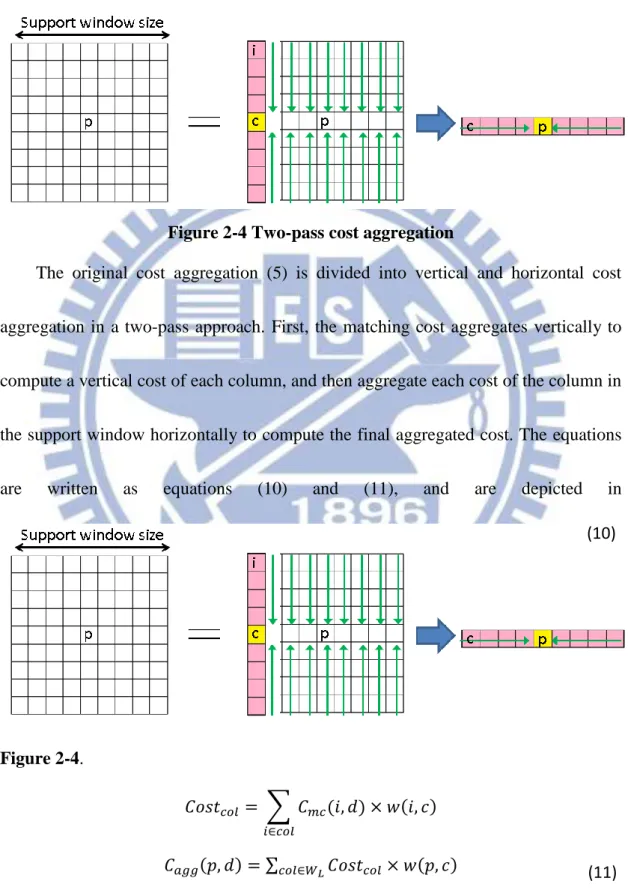
2.3.3 Two-pass Cost Aggregation
Figure 2-4 Two-pass cost aggregation
The original cost aggregation (5) is divided into vertical and horizontal cost
aggregation in a two-pass approach. First, the matching cost aggregates vertically to
compute a vertical cost of each column, and then aggregate each cost of the column in
the support window horizontally to compute the final aggregated cost. The equations
are written as equations (10) and (11), and are depicted in
Figure 2-4.
𝐶𝑜𝑠𝑡𝑐 = ∑ 𝐶 𝑐(𝑖, 𝑑) × 𝑤(𝑖, 𝑐)
𝑐
𝐶𝑎𝑔𝑔(𝑝, 𝑑) = ∑𝑐 𝑊𝐿𝐶𝑜𝑠𝑡𝑐 × 𝑤(𝑝, 𝑐)
where 𝐶 𝑐 is the mini-census cost defined in equation (8). Notice that c represents
(10)
13
the center pixel which changes column by column. Consequently, the MCADSW
method may improve the low-textured region with smoothing disparity, since the
correlated weight of the border or corner pixels could be increased with the help of
14
Chapter 3 Proposed Method
3.1 Motivation
In [7], the adaptive support weight can achieve the effect of using support
window with arbitrary sharp and give a quality depth result. Later, [2] proposed a
segment-based support weight to improve the performance. Mini-census transform in
[3] is employed to improve the capability of handling the lighting effect. However,
they all used a fixed support window size. According to our observation in Figure
3-1, , it shows that the performance will not always be better while the support
window size gets larger. This drawback is evident especially for Teddy and Cones
sequences. The issue of support window size still remains. Moreover, the mini-census
matching cost in [3] is much less sensitive to brightness bias, but it might cause errors
in low textured region since it lacks of color information.
According to the problems mentioned above, we proposed an algorithm which is
modified from the Mini-Census Support Weight (MCADSW) [3]. In the proposed
method, we combine the mini-census transform with the robust absolute differences
(RAD) measure to increase the robustness of the matching process. In addition, the
segment-based idea is inspired from [2] which apply the information obtained from
15
could determine the variable support window size instead of a fixed one. Besides, the
segment information can also be used for disparity refinement to improve the
performance of the final disparity result.
Figure 3-1 The performance comparison with different window size
0 5 10 15 20 25
nonocc all disc Average
Er ro r ra te(%)
Teddy
w=15 w=31 w=51 0 2 4 6 8 10 12nonocc all disc Average
Er ro r ra te(%)
Venus
w=15 w=31 w=51 0 2 4 6 8 10 12 14nonocc all disc Average
Er ro r ra te(%)
Tsukuba
w=15 w=31 w=51 0 2 4 6 8 10 12 14nonocc all disc Average
Er ro r ra te(%)
Cones
w=15 w=31 w=5116
3.2 The flow of the proposed method
Figure 3-2 The flow of the proposed algorithm
Figure 3-2 shows the flow of the proposed algorithm. First, we employ the
Mean-Shift algorithm to segment the inputted stereo images into regions according to
similar color. Second, the initial matching cost is computed by the combined matching
cost measure. After that, the weight generation and truncation step generates the
weight coefficients needed in the cost aggregation. Before the cost aggregation, we
employ the segment information to determine the support window size. And then, the
matching cost will be aggregated by a two-pass cost aggregation. Once the aggregated
17
(WTA) strategy. Finally, the result can be refined by left-right check and region-based
cross voting.
3.3 Robust matching cost computation
Mini-census cost transforms the intensity of the data term into relative bitstreams.
Hence it can tolerate outliers caused by radiometric noise. Nevertheless, it could also
lead to matching ambiguities in the regions with repetitive pattern, while the color
information can deal with these matching ambiguities. The idea of combining cost
measures for improved performance of matching process is inspired from the works
accomplished by Mei et al [13]. . They propose a combined cost measure with the AD
and census for matching cost initialization. The benefit of the combination is
impressive with a few additional computation time.
Based on MCADSW [9], we tend to preserve the mini-census cost measure Cmc
and combine with the color constraint. However, the origin AD cost range [0,255] is
much bigger than the mini-census cost range [0,6], so the combination cost might be
biased to the AD cost. Therefore, a robust function R is adopted for the AD measure
which maps the cost value range from [0,255] to [0,1]. It is defined as R(CAD, λAD) = 1 − exp (−CAD
λAD)
,where CAD is the traditional AD cost described as equation (1), and 𝜆 is allowed
to control the influence of outliers. Given a pixel p with respect to a disparity level d, (12)
18
the proposed robust matching cost can be calculated as follows: 𝐶 𝑏𝑢𝑠𝑡(𝑝, 𝑑) = 𝐶 𝑐+ 𝜆 × 𝑅(𝐶 , 𝜆 )
,where 𝜆 is a tuning constant to control the influence between color similarity and
the relative information.
3.4 Weight generation and truncation
We exploit the weight function of the MCADSW described in equation (9), In
addition, a simple truncation is implemented to alleviate the matching error due to
outlier pixels. We give a minimum value zero to these outliers. Hence, a modified
weight function is proposed:
𝑤(𝑝, 𝑖 ) = {0 , 𝑖 𝑑𝑐(𝑝, 𝑖) > 𝑇𝑤 𝑞 𝑛𝑡𝑖 𝑒 [𝑒 𝑝 (− (𝑝, )) × 𝑠𝑐 𝑖𝑛𝑔 𝑐𝑡𝑜𝑟] , 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
,where 𝑇𝑤 represents the threshold to separate the outliers; the cost 𝑑𝑐(𝑝, 𝑖) is sum
of color difference in YUV color space which is defined as
𝑑
𝑐(𝑝, 𝑖) = ∑
{𝑌,𝑈,𝑉}|𝐼
(𝑝) − 𝐼
(𝑖)|
The curve of our weight function is shown in Figure 3-3.
(13)
(14)
19
Figure 3-3 The curve of our proposed weight function
3.5 Support window size selection
The basic concept of the proposed method is to employ the segment information
to change the correlation window size. From our analysis, the MCADSW method still
suffers from some incorrect disparity estimation at occlusion, low textured, and
repeating pattern areas. Although we can improve the matching quality by applying a
larger supporting window, the disparity map might be blurred near the discontinuous
area.
3.5.1 Image segmentaion
The concept of the segmentation process is to cut the image into several regions
which can enlarge the region size as big as the spatial and color is assessed. In our YUV color difference
20
approach, we adopt the Mean-Shift algorithm to process the segmentation. Two
constant parameters σS and σR are referred as spatial radius and range radius
which construct the restraint of growing the segment. And the parameter 𝐹 𝑠𝑒
promises the minimum size of each region. Figure 3-4 shows the left image and its
segmentation result of each of four testing stereo images available on Middlebury
website [11], with the same parameter set: 𝜎𝑆 = 3, 𝜎 = 3, 𝐹 𝑠𝑒 = 35.
After the image segmentation step, the addition information of segment
represents an intelligent proximity rather than the spatial distance, and it can be
employed later in the support window size selection and the refinement step.
3.5.2 Variable window size selection
Instead of adopting a fixed support window size, the proposed method makes use
of information obtained from the Mean-shift algorithm to determine the support
window size. By observing the segment result shown in Figure 3-4, a large segment
is often related to a low textured or repeating area, where the support window should
be enlarged to obtain more support information. On the other hand, a small segment is
usually related to a border or occluded area. The MCADSW method can achieve the
window with arbitrary shape to deal with border area, and the occluded area can be
21
Hence, the window size selection can be expressed as:
𝑊 = {𝑊𝑠 𝑎 , 𝑖 𝑁 𝑚(𝑆𝑒𝑔(𝑝)) < 𝑇𝑐 𝑢𝑛𝑡 𝑊𝑏 𝑔 , 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
Figure 3-4 The left image and the segmentation result of 4 stereo images
22
3.6 Two-pass cost aggregation
Once the window size is selected, the two-pass cost aggregation can be
processed. We adopt the same aggregation direction in [9] but simply modify the
original aggregation function (10)(11) with normalization after the cost aggregates.
The modified functions are described as equations (17) and (18):
𝐶𝑜𝑠𝑡
𝑐=
∑𝑖 𝑜𝑙𝐶∑𝑅𝑜𝑏𝑢𝑠𝑡( , )×𝑤( ,𝑐) 𝑤( ,𝑐) 𝑖 𝑜𝑙𝐶
𝑎𝑔𝑔(𝑝, 𝑑) =
∑ 𝑜𝑙 𝑊𝐶 𝑠𝑡 𝑜𝑙×𝑤(𝑝,𝑐) ∑ 𝑜𝑙 𝑊𝑤(𝑝,𝑐)3.7 Disparity refinement
The disparity maps computed by the above steps contain errors in the occluded
and discontinuous regions. The results of left and right images are denoted as 𝐷 and
𝐷 , respectively. We refine the disparity errors by several steps. First, we smoothen the disparity map by a 3x3 median filter to alleviate the noise. Second, we detect the
outliers by the left-right check and then classify them into two categories. After that,
we treat the two kinds of outliers with different refinement rules. Finally, a
region-based cross voting refinement is performed. The first step has been introduced
in Figure 1-3, and the other steps are introduced as following.
(17) (18)
23
3.7.1 Left-right check and Outliers classification
Left-right consistency check [6] is a widely used technique to detect the outliers.
For each pixel, a following check is performed:
𝐷 (𝑝) = 𝐷 (𝑝 − (𝐷 (𝑝), 0))
If a pixel can’t satisfy the check, it is considered as an outlier. And then, based on the
method proposed by Hirschmϋller [14], we classify the outliers into “occlusion” and “mismatch” points. For each outlier pixel p, we perform the left-right check with all disparity candidates, and if no candidate could hold the check, p is an “occlusion”
pixel, otherwise a “mismatch” pixel.
Figure 3-5 demonstrates the classification results of four sequence on
Middlebury data sets compared with the occluded-region in the ground truth. If a
pixel is labeled as “occlusion”, we depict it with black color, and a “mismatch” pixel
is depicted with gray. The classification can effectively separate the occluded-region
which is similar to the ground truth.
24
Figure 3-5 The classification results(left) and the occluded-region in the ground truth(right)
3.7.2 Outlier refinement
The different kinds of outlier pixels require different refinement strategies.
25
horizontal scanline w that starts from the pixel p - (N,0) to the pixel p+(N,0).
And then we accept the disparity of q to p, which can be expressed as
𝐷
(𝑝) = {𝐷
(𝑞)|
min
𝑞 𝑝±(𝑁,0),𝑞≠𝑝
𝐶
(𝑝, 𝑞)}
2) If p is an occluded pixel, we first search the left and right nearest reliable
disparity, respectively denoted as 𝑆 and 𝑆2. If only one reliable pixel is
found, 𝐷 (𝑝) is simply replaced by 𝐷 (𝑆 ) or 𝐷 (𝑆2). Otherwise,
𝐷 (𝑝) = min (𝐷 (𝑠 ), 𝐷 (𝑠2)) .
3.7.3 Region-based cross voting
Figure 3-6 Region-based cross voting
In this step, we reuse the segment information to further refine the disparity map.
For each pixel p, we build a histogram 𝑝 with DSR+1 bins for a cross voting
scheme, where DSR represents the disparity search range. The cross voting scheme is
depicted in Figure 3-6. We survey the neighbors both from the vertical and horizontal
directions, and collect the disparity votes if the neighbor q is located on the same
segment of p. After votes collection, the disparity candidate with the most votes is
26
Chapter 4 Experimental Results
To evaluate a stereo algorithm, a benchmark is provided on Middlebury Website
[11]. The four sequences, Tsukuba, Venus, Teddy, and Cones, are the most commonly
used for testing performance. For each image pair three error measures are proposed:
all image regions except for occlusions (nonocc), all regions (all), and near depth
discontinuities (disc). The default error threshold is set to 1.0.
In this section we present some experimental results of the proposed method.
The parameters are kept constant for all the data sets, which are presented in Table I.
𝜎𝑆 𝜎 𝐹 𝑠𝑒 𝜆 𝜆 𝜆𝑐
3 3 35 2 10 15
𝑇𝑤 𝑊𝑠 𝑎 𝑊𝑏 𝑔 𝑇𝑐 𝑢𝑛𝑡 N
100 31x31 51x51 300 15
Table I Parameter settings for the Middlebury evaluation
4.1 Evaluation of the robust matching cost measure
First we compare the MCADSW [9] result obtained from our implement and the
result after adopted the robust matching cost, which is referred as RCADSW. Both by
using the winner-take-all (WTA) strategy, Figure 4-1 shows the gain which comes
from the combined matching cost measure, and the gain is independent of the
27
Figure 4-1 The averaged error rate in different cost measure (w means the support window size)
0 2 4 6 8 10 12 14
nonocc all disc Average
A ve rag e E rr o r rate (% )
w = 15
RCADSW MCADSW 0 2 4 6 8 10 12nonocc all disc Average
A ve rag e E rr o r rate (% )
w = 31
RCADSW MCADSW 0 2 4 6 8 10 12 14nonocc all disc Average
A ve rag e E rr o r rate (% )
w = 51
RCADSW MCADSW28
4.2 Compare the intermediate results of proposed method
In addition, we compared the intermediate and final disparity result of our
proposed method. The support window size is fixed as 31x31 both to MCADSW and
RCADSW. The results using variable window size method with and without the final
refinement are respectively denoted as “Proposed” and “Pro+refine”. The quantitative
evaluation of the intermediate and final disparity result is shown in Figure 4-2:
4 6 8 10 12 14 16 18 20
MCADSW RCADSW Proposed Pro+refine
e rr o r p e rc e n tage(% )
diparity estimation step
Teddy nonocc all disc Average 0 1 2 3 4 5 6 7 8
MCADSW RCADSW Proposed Pro+refine
e rr o r p e rc e n tage(% )
diparity estimation step
Venus
nonocc all disc
29
Figure 4-2 The error percentages of different error measures for 4 methods by our implementation
Table II lists the average bad pixels with average ranking of 4 methods are
respectively: Our MCADSW 7.57% (82.3), RCADSW 7.10% (74.7), proposed 6.8%
(67.3), pro+refine 5.63% (39.1). These experimental results show that the
performance can be improved by each step in the proposed algorithm.
0 2 4 6 8 10 12
MCADSW RCADSW Proposed Pro+refine
e rr o r p e rc e n tage(% )
diparity estimation step
Tsukuba
nonocc all disc 0 2 4 6 8 10 12 14MCADSW RCADSW Proposed Pro+refine
e rr o r p e rc e n tage(% )
diparity estimation step
Cones
nonocc all disc
30
Table II Compared the results obtained from different step in the proposed algorithm
Algorithm
Tsukuba Venus Teddy Cones
non occ
all disc non occ
all disc non occ
all disc non occ
all disc Proposed 1.74 2.36 8.11 0.69 1.63 5.60 6.42 13.5 16.9 3.70 11.8 9.13
MCADSW [9] 2.80 0.64 13.7 10.1
SegmentSupport [8] 2.05 7.14 1.47 10.5 10.8 21.7 5.08 12.5 Table III Comparison between proposed method and the related works using winner-take-all before refinement step
Algorithm
Tsukuba Venus Teddy Cones Avg.
Bad Pixels Avg. Rank non occ
all disc non occ
all disc non occ
all disc non occ all disc AdaptWeight [7] 1.38 1.85 6.90 0.71 1.19 6.13 7.88 13.3 18.6 3.97 9.79 8.26 6.67 64.6 SegmentSupport [8] 1.25 1.62 6.68 0.25 0.64 2.59 8.43 14.2 18.2 3.77 9.87 9.77 6.44 53.7 AdaptLocalSeq [15] 1.33 1.82 7.19 0.32 0.79 4.50 5.32 11.9 14.5 2.73 9.69 7.91 5.67 44.9 Proposed 1.74 2.36 8.11 0.69 1.63 5.60 6.42 13.5 16.9 3.70 11.8 9.13 6.80 67.3 Pro+refine 1.99 2.25 9.70 0.20 0.32 1.76 5.83 11.1 15.3 2.89 8.40 7.71 5.63 39.1
Table IV Quantitative Middlebury evaluation of the propose method and the state-of-the-art local method
Algorithm Tsukuba Venus Teddy Cones Avg.Bad
Pixels nonocc all disc nonocc all disc nonocc all disc nonocc all disc
Our MCADSW 2.71 3.33 11.1 0.62 1.50 5.16 6.75 14.5 18.4 3.91 12.4 10.4 7.57 RCADSW 2.37 2.93 10.3 0.84 1.86 7.26 6.35 14.3 17.1 3.23 11.6 8.76 7.10 Proposed 1.74 2.36 8.11 0.69 1.63 5.60 6.42 13.5 16.9 3.70 11.8 9.13 6.80 Proposed+refine 1.99 2.25 9.70 0.20 0.32 1.76 5.83 11.1 15.3 2.89 8.40 7.71 5.63
31
4.3 Compare with the reference works
Table III demonstrates the comparison between proposed method and the two
related work on the Middlebury stereo benchmark using a winner-take-all (WTA) rule.
The table also reports the results published in [8] and [9] without the refinement
process which consist only part of the error measures. As it can be seen from the table,
the proposed method produces a notable improvement on non-occluded and
discontinuous area compared to segment support method.
4.4 Compare with state-of-the-art methods
In the disparity refinement step, we fill the detected outliers with the reliable
neighbor pixels and introduce a histogram for cross voting procedure. Then, we
submit the obtained disparity maps to the Middlebury website and are compared to
the current state-of-the-art local methods. The quantitative Middlebury evaluation is
shown in Table IV. And the error percentages of different error measures for 4 test
stereo pairs in shown in Figure 4-3.
Finally, we show the disparity result obtained by the proposed method. From
Figure 4-4 to Figure 4-7 show the disparity maps and the corresponding error maps
32
error maps is evaluated by the default error threshold 1.0. The bad pixels are depicted
with gray color in occluded area, otherwise the black.
(a) Error rate of Teddy sequence
(b) Error rate of Teddy sequence 0 2 4 6 8 10 12 14 16 18 20
nonocc all disc Average
e rr or p e rcen ta ge (%)
Teddy
ADSW SegmentSupport AdaptLocalSeq Pro+refine 0 1 2 3 4 5 6 7nonocc all disc Average
e rr or p e rcen ta ge (%)
Venus
ADSW SegmentSupport AdaptLocalSeq Pro+refine33
(c) Error rate of Teddy sequence
(d) Error rate of Teddy sequence
Figure 4-3 The error percentages of different error measures for 4 test stereo pairs obtained from different methods
0 2 4 6 8 10 12
nonocc all disc Average
e rr or p e rcen ta ge (%)
Tsukuba
ADSW SegmentSupport AdaptLocalSeq Pro+refine 0 2 4 6 8 10 12nonocc all disc Average
e rr or p e rcen ta ge (%)
Cones
ADSW SegmentSupport AdaptLocalSeq Pro+refine34
(a)Left image of Teddy (b) Ground truth
(c) result of ADSW [7] (d) Error map in [7]
(e) result of SementSupport [8] (f) Error map in [8]
(g) result of proposed method (h) Error map in proposed method
Figure 4-4 The disparity maps and the corresponding error map of our proposed method and related methods on Teddy sequence
35
(a)Left image of Venus (b) Ground truth
(c) result of ADSW [7] (d) Error map in [7]
(e) result of SementSupport [8] (f) Error map in [8]
(g) result of proposed method (h) Error map in proposed method
Figure 4-5 The disparity maps and the corresponding error map of our proposed method and related methods on Venus sequence
36
(a)Left image of Tskuuba (b) Ground truth
(c) result of ADSW [7] (d) Error map in [7]
(e) result of SementSupport [8] (f) Error map in [8]
(g) result of proposed method (h) Error map in proposed method
Figure 4-6 The disparity maps and the corresponding error map of our proposed method and related methods on Tsukuba sequence
37
(a)Left image of Cones (b) Ground truth
(c) result of ADSW [7] (d) Error map in [7]
(e) result of SementSupport [8] (f) Error map in [8]
(g) result of proposed method (h) Error map in proposed method
Figure 4-7 The disparity maps and the corresponding error map of our proposed method and related methods on Cones sequence
38
Chapter 5 Conclusion
In this paper, a combined matching cost measure with mini-census and color
difference is proposed. Moreover, we propose a variable window size selection
strategy before cost aggregation step. The strategy determines the support window by
utilizing the segment information derived from a color based segmentation method.
This information is also used for region-based cross voting scheme in refinement step.
Experimental results show that the proposed method effectively improves the
performance of original method in low textured region and near depth discontinuities. According the performance evaluation at the Middlebury website, the proposed
39
Reference
[1] M. Tanimoto, “Free viewpoint television - FTV,” in Proceedings of Picture
Coding Symposium (PCS), 2004.
[2] D. Scharstein and R. Szeliski, “A Taxonomy and Evaluation of Dense
Two-Frame Steroe Correspondence Algorithms,” International Journal of
Computer Vision, vol. 47, no. 1-3, pp. 7-42, 2002.
[3] R. Zabih and J. Woodfill, “Non-parametric local transforms for computing
visual correspondence,” in Proceeings of third European Conference on
Computer Vision, vol. 2, pp. 151-158, 1994.
[4] H. Hirschmϋller and D. Scharstein, “Evaluation of Stereo Matching Costs on
Images with Radiometric Differences,” IEEE Transactions on Pattern Analysis
and Machine Intelligence, vol. 31, no.9, pp. 1582-1599, 2009.
[5] Y. Boykov, O. Veksler, and R. Zabih, “Fast Approximate Energy Minimization
via Graph Cuts,” IEEE Transctions on Pattern Analysis and Machine
Intellgence, vol. 23, no. 11, November 2001.
[6] P. fua, “Combining Stereo and Monocular Information to Compute Dense
Depth Maps that Preserve Depth Discontinuities,” 12th International Joint
40
[7] K.-J. Yoon and I.-S. Kweon, “Adaptive Support-weight Approach for
Correspondence search,” IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol.28, No.4, pp. 650-656, April 2006.
[8] F. Tombari, S. Mattoccia, and L. Di Stefano, “Segmentation-Based Adaptive
Support for Accurate Stereo Correspondence,” Lecture Notes in Computer
Science, vol. 4872, pp. 427-438, 2007.
[9] N. Y.-C. Chang, T.-H. Tsai, B.-H. Hsu, Y.-C. Chen, and T.-S. Chang, “Algorithm and Architecture of Disparity Estimation With Mini-Census Support Weight,” IEEE Transactions on Circuit and System for Video
Technology, vol. 20, no. 6, June 2010.
[10] Z.-F. Wang and Z.-G. Zheng, “A Region Based Stereo Matching Algorithm
Using Cooperative Optimization,” IEEE International Conference on Computer
Vision and Pattern Recognition, pp. 1-8, June 2008.
[11] D. Scharstein and R. Szeliski, “Middlebury stereo evaluation - version 2,”
http://vision.middlebury.edu/stereo/eval/, 2010.
[12] D. Comanicu, P. Meer, “Mean Shift: A Robust Approch Toward Feature Space
Analysis,” IEEE Transactions on Pattern Analysis and Machine Intelligence,
41
[13] X. Mei, X. Sun, M. Zhou, S. Jiao, H. Wang, and X. Zhang, “On building an
Accurate Stereo Matching System on Graphics Hardware,” Computer Vision
Workshops, pp. 467-474, 2011.
[14] H. Hirschmϋller, “Stereo Processing by Semiglobal Matching and Mutual
Information,” IEEE Transactions on Pattern Analysis and Machine Intelligence,
pp. 328-341, Feb. 2008.
[15] E.T. Psota, J. Kowalczuk, J. Carlson, and L. C. Perez, “A Local Iterative
Refinement Method for Adaptive Stereo Matching,” IPCV, 2011.
[16] F. Tombari, S. Mattoccia, L. Di Stefano, and E. Addimanda, “Classification and
Evaluation of Cost Aggregation Methods for Stereo Correspondence,” in
Proceedings of IEEE International Conference on Computer Vision and Pattern
![Figure 2-3 The mini-census transform and matching introduced in [9]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8389356.178636/20.892.154.710.370.834/figure-mini-census-transform-matching-introduced.webp)