國 立 交 通 大 學
運輸科技與管理學系
碩 士 論 文
混合演化巨集啟發式解法
應用於具時間窗車輛路線問題之研究
A Hybrid Evolutionary Metaheuristics
for the Vehicle Routing Problem with Time Windows
研
究 生:王春鎰
指導教授:韓復華 教授
混合演化巨集啟發式解法應用於具時間窗車輛路線問題之研究
學生:王春鎰
指導教授:韓復華 教授
國立交通大學運輸科技與管理學系碩士班
摘 要
車輛路線問題由於能廣泛應用於相關實務問題,因此有不少研究針對各種不 同之車輛路線問題進行深入的探討。其中具時間窗車輛路線問題是所有車輛路線 問題中,最基本也最重要的一個問題,國內外一直都有許多學者針對此問題研究 求解方法,希冀能夠獲得不錯的成果。本研究以Homberger and Gehring (2005)所提出之兩階段混合演化巨集啟發 式解法為基礎,結合Solomon I1 插入法構建多個起始解,(μ, λ)-演化策略進行 第一階段以極小化車輛數為主要目標的改善,回溯式門檻接受法(Backtraking Adaptive Threshold Accepting, BATA)在第二階段以極小化旅行距離為主要目標 進行最後之改善,來求解具時間窗車輛路線問題。並以Solomon(1983)所提出之 56 題國際標竿題庫進行測試,探討本研究提出之解題模組,其求解績效。 本研究在(μ, λ)-演化策略中提出交換模組之車輛節省接受法則,以增進在 該階段極小化車輛數之績效,並在可回溯式門檻接受法中探討多種參數組合以及 交換模組組合,進行解題績效之探討。經過測試之後,本研究56 題測試題庫之 最佳結果,車輛數為416 輛,總旅行距離為 58001.90,與文獻已知最佳解─車輛 數為404 輛、總旅行距離為 56639.00 之誤差皆在 3%以內(車輛數為 2.97%、總旅 行距離為2.41%)。其中有十題與文獻已知最佳解結果相同。 關鍵詞:具時間窗車輛路線問題、混合演化巨集啟發式解法、(μ, λ)-演化策略、 可回溯式門檻接受法
A Hybrid Evolutionary Metaheuristics
for the Vehicle Routing Problem with Time Windows
Student: Chuen-Yih Wang Advisor: Anthony Fu-Wha Han Department of Transportation Technology and Management
National Chiao Tung University
Abstract
Vehicle Routing Problem with Time Windows (VRPTW), an extension of the classical Vehicle Routing Problem (VRP), has been widely applied to logistics and home delivery. The VRPTW considers that customers request the carrier to serve them within a specific time interval, i.e. time window. Such a constraint makes the VRPTW harder to slove than the VRP. Therefore, most of the solution methods for VRPTW are heuristics or metaheuristics.
The objective function of the VRPTW considered combines the minimization of the number of vehicles (first priority) and the total travel distance (second priority). Our research is based on the two-phase hybrid metaheuristics introduced by Homberger and Gehring (2005). The aim of the first phase is the minimization of the number of vehicles by means of a (μ, λ)-evolution strategy, and in the second phase, the total distance is minimized using Backtracking Adaptive Threshold Accepting (BATA) proposed by Tarantilis et al. (2001). Solomon’s 56 benchmark VPRTW instances were utilized to evaluate the performance of this hybrid evolutionary metaheuristics.
In this thesis, we propose a vehicle saving acceptance rule to enhance the performance of (μ, λ)-evolution strategy. In BATA, we test several combinations of parameters and improvement methods. All the experiments of this metaheuristics are coded in C# and implemented on a computer with AMD Athlon(tm) 64 Processor 3000+.
As to all of the 56 instances tested, the total number of vehicles of the best solution found by our proposed hybrid evolutionary metaheuristics is 416, and the total travel distance is 58001.90. As compared to the best known solutions of the benchmark instances, the average deviation of required vehicles is 2.97%, and the average deviation of total distance is 2.41%. Among those 56 benchmark instances, we have found the best known solutions in 10 instances.
Keywords: Vehicle Routing Problem with Time Windows (VRPTW),
Hybrid Evolutionary Metaheuristics, (μ, λ)-evolution Strategy, Backtracking Adaptive Threshold Accepting (BATA)
目 錄
中文摘要...i 英文摘要...ii 目 錄... iii 表 目 錄...v 圖 目 錄...v 第 一 章 緒論...1 1.1 研究背景與動機...1 1.2 研究目的與範圍...2 1.3 研究方法與流程...3 第 二 章 具時間窗車輛問題文獻回顧...5 2.1 具時間窗車輛路線問題定義...5 2.2 具時間窗車輛路線問題解法回顧...6 2.2.1 時間可行性之檢驗...6 2.2.2 路線構建式啟發式解法...7 2.2.3 路線改善法...10 2.2.4 綜合型構建/改善法 ...14 2.2.5 巨集啟發式解法...15 2.2.6 (μ,λ)演化策略...21 2.2.7 可回溯式門檻接受法...21 第 三 章 混合演化巨集啟發式解法之模式構建...23 3.1 混合演化巨集啟發式解法求解架構...23 3.2 起始解模組之建構...24 3.3 第一階段:(μ,λ)演化策略之建構...26 3.4 第二階段:可回溯式門檻接受法之建構...27 第 四 章 混合巨集啟發式解法之測試與分析...30 4.1 具時間窗車輛路線問題測試例題...30 4.2 起始解模組測試與分析...30 4.3 第一階段:(μ,λ)演化策略之測試與分析...31 4.4 第二階段:可回溯式門檻接受法之測試與分析...32 4.5 測試最佳結果...34 4.6 測試結果與文獻已知最佳解之比較...36 4.6.1 文獻已知最佳解...36 4.6.2 測試結果與文獻已知最佳解比較分析...38 第 五 章 結論與建議...42 5.1 結論...42 5.2 建議...42 參考文獻...44表目錄
表 2. 1 SA、TA、GDA 與 RRT 等方法之比較 ...19 表 4. 1 交換法特殊接受法則有無之比較...31 表 4. 2 Iteration 效率改進測試 ...32 表 4. 3 μ、λ 參數組合測試...32 表 4. 4 交換法組合順序之測試...33 表 4. 5 T0、K 測試結果...33 表 4. 6 r、b 測試結果 ...33 表 4. 7 最佳參數組合各階段改善效果...34 表 4. 8 本研究最佳結果與第二階段對應之參數 (群聚分佈題組)...35 表 4. 9 本研究最佳結果與第二階段對應之參數 (混合分佈題組)...35 表 4. 10 本研究最佳結果與第二階段對應之參數 (隨機分佈題組)...36 表 4. 11 Solomon 56 題測試題庫文獻已知最佳解 ...37 表 4. 12 測試結果與文獻最佳解之比較 (群聚分佈題組)...39 表 4. 13 測試結果與文獻最佳解之比較 (混合分佈題組)...39 表 4. 14 測試結果與文獻最佳解之比較 (隨機分佈群組)...40 表 4. 15 本研究最佳結果與文獻已知最佳解之分類比較...41圖目錄
圖 1. 1 研究方法與流程...4 圖 2. 1 時間可行性示意圖...7 圖 2. 2 節省法路線方向衝突示意圖...7 圖 2. 3 2-Opt 節線交換法解題觀念 ...11 圖 2. 4 2-Opt* 節線交換法解題概念 ...12 圖 2. 5 Or-Opt 節線交換法解題觀念...12 圖 2. 6 保持方向性之路線內 3-exch 節線交換法解題觀念...13 圖 2. 7 1-0 節點交換法之解題觀念 ...14 圖 2. 8 1-1 節點交換法之解題概念 ...14 圖 2. 9 TA 與 SA 接受暫劣解機率之比較 ...17 圖 2. 10 大洪水法解題概念示意圖...18 圖 2. 11 TA、GDA 與 RRT 接受法則示意圖 ...19 圖 2. 12 GIDS 之解題概念架構 ...20 圖 2. 13 (μ,λ)演化策略示意圖...21 圖 2. 14 BATA 門檻數列收斂示意圖 ...22 圖 3. 1 演化巨集啟發式解法架構圖...23 圖 3. 2 起始解構建流程圖...25 圖 3. 3 Reduction 解題示意圖 ...26圖 3. 4 第一階段:(μ,λ)演化策略流程圖...27 圖 3. 5 第二階段:可回溯式門檻接受法流程圖...28
第一章 緒論
1.1 研究背景與動機 目前全世界的競爭趨勢改變,已經由企業與企業間的競爭擴大到供應鏈與 供應鏈間的競爭。每個供應鏈內上、中、下游的公司組織與企業均須配合整體 供應鏈之流程與活動,以求降低成本,提升效率,並共享利潤。其中,物流作 業為供應鏈相當重要的一環,根據統計資料顯示,物流成本約佔企業總銷售金 額的15%~25%左右,其中運輸成本又佔物流成本的 25%~45%。因此,對於配 送物料實體的車輛路線問題安排與規劃仍為不可忽視的一個重要課題。 物料配送作業效率的重點之ㄧ在於如何有效率的使用車輛以及決定最經 濟之行駛路線,可知影響成本的因素可分為兩部份,一為所需使用的車輛數, 另一為車輛行駛之總旅行距離。若能以較少的車輛,經由較經濟的路線,在指 定時間內配送原料或產品到各個目的地,對企業產品供應鏈中之運輸環節而 言,已達成有效率的貢獻。因此,如何找出有效率的派車路線,成為企業運輸 配送問題中一個重要課題。此外由於JIT(Just in Time)觀念的提出,製造工廠往 往要求原料或半成品在一定的時間窗(Time Window)內送達以便即時組裝,如何 因應時間窗的要求而能夠達到有效率的配送,也是物流供應鏈之重要環節。由上述知,具時間窗車輛路線問題(Vehicle Routing Problem with Time Windows, VRPTW)極為重要。不僅在實務上已有廣泛的應用,如宅配、銀行遞 送、郵務遞送、校園公車與撥召等路線問題,在學術界上也已經有許多學者進 行廣泛的探討。VRPTW 與車輛路線問題(Vehicle Routing Problem, VRP)同樣屬 於NP-hard 的問題,當問題規模增大時,其求解出精確解(Exact solution)的時間 隨問題變數個數呈指數成長。而且VRPTW 又比 VRP 多了時間窗以及路線時限 之限制,求解複雜度更為提高。一般精確解演算法(Exact methods)如動態規劃 法(Dynamic Programming)及分支定限法(Branch and Bound)均無法保證在有限 時間內求出最佳解。因此,當問題規模擴大或實務應用時,宜採用較有效率之 啟發式解法(Heuristic Algorithms)來求解,以冀在有效的時間內求解出精確度高 的近似解。
目前國內外對於VRPTW 之啟發式解法,大致上可分為三類,分別為路線 構 建 式 啟 發 式 解 法(Route Construction Heuristics) 、 路 線 改 善 法 (Solution Improvement Methods)以及巨集啟發式解法(Metaheuristics)。由於傳統啟發式方 法在求解過程中,可能會陷入局部最佳解(Local Optimum),而無法繼續搜尋精 確度更高的解。而從Glover (1986)在其文章中揭示了巨集啟發式解法的意涵與 精神後,巨集啟發式解法一詞已獲得大多數學者的認同並沿用至今。而巨集啟 發式解法在組合最佳化問題之求解方面,均有明顯優於傳統啟發式解法之績效 表現,也成為求解此類問題的主要方法。常見的巨集啟發式解法包含了:禁忌 搜尋法(Tabu Search, TS)、演化法(Evolutionary Algorithm, EA)、門檻接受法
(Threshold Accepting, TA)、螞蟻演算法(Ant Colony Optimization, ACO)等等,這 些方法均有避免陷入局部最佳解之機制。
由於求解具時間窗車輛路線問題包含了極小化車輛數以及極小化總旅行 距離兩個目標,因此有學者提出利用混合不同之啟發式解法,結合不同演算法 之優點以求得較好之結果。如:Thangiah et al. (1994)以及 Homberger ang Gehring (2005)皆利用混合兩種以上之巨集啟發式解法在不同階段以不同目標求解 VRPTW,並且都有不錯之成果。
有鑒於VRPTW 在實務運用上的重要性,以及混合巨集啟發式解法的特性與 潛力,本研究之目的乃希望以Homberger and Gehring (2005)所提出之混合演化巨 集啟發式解法之架構為基礎,結合演化策略以及可回溯式門檻接受法之優點,發 展一套混合演化巨集啟發式解法,應用於VRPTW 進行求解,期望能在有效的時 間之內,求解出精確度較高的近似最佳解。 1.2 研究目的與範圍 車輛路線問題(VRP)乃是由同一車種、固定容量的車隊,從單一場站出發, 服務完一群需求量已知的顧客後返回中心場站。其目標在使車輛使用數最少, 車輛路線總距離成本最小。而本研究內容範圍為VRP 的延伸問題之一:具時間 窗車輛路線問題(VRPTW)。 其中,時間窗限制可分為「硬時間窗」及「軟時間窗」兩種。硬時間窗意 指不可違反時間窗限制,即必須在顧客要求之開始時間與結束時間之內服務該 顧客,否則為不可行解。但允許車輛可在時間窗開始之前到達該顧客點,惟須 等到時間窗開始時間,始可進行服務(停等時間)。軟時間窗則意指可以違反時 間窗限制,但違反時會給予一懲罰成本,此外每條路線之總時間不可違反路線 時限限制。本研究將針對硬時間窗車輛路線問題進行求解。 VRPTW 與 VRP 同樣屬於 NP-hard 的問題,當問題規模增大時,其求解出 精確解的時間隨問題變數個數呈指數成長。而且VRPTW 又比 VRP 多了時間窗 以及路線時限之限制,求解的複雜度更為提高。因此,當問題規模擴大或實務 應用時,宜採用較有效率之啟發式解法來求解,以冀在可接收的時間內求解出 精確度高的近似解。
如同前言所述,因此本研究主要應用Homberger and Gehring (2005)所提出 之混合演化啟發式解法為基礎,於不同階段以不同目標求解 VRPTW。主要求 解架構為:在第一階段先以Solomon I1 插入法構建多個起始解後,再利用(μ, λ)-演化策略,構建一以極小化車輛數為目標的演化啟發式解法,之後在第二 階段建構一個在極小化總旅行距離有不錯成果之巨集啟發式解法─可回溯式門 檻接受法(Backtracking Adaptive Threshold Accepting, BATA)來作最後的改善。本 研究依以上方法建構出一混合演化巨集啟發式解法來求解 VRPTW,並測試 Soloman (1983)所提出之國際標竿測試題庫,以求解之結果(車輛數以及總旅行
距離)及執行時間效率(Efficiency)作為評估指標,期望合理的時間之內,在求解 VRPTW 問題的精確度上可以有更好的表現。 1.3 研究方法與流程 本研究之研究方法與流程,如圖 1. 1 所示,分述如下。 1. 相關文獻蒐集與回顧 蒐集目前國內外對於VRPTW 與演化法之相關文獻並回顧之,以了解各種 巨集啟發式解法與演化法之解題觀念、解題架構與發展現況。並蒐集目前國際 上已發表之VRPTW 文獻中的標竿測試例題(主要為 Soloman (1983)之測試例題) 以及其最佳結果,以建立測試題庫,作為本研究提出之混合演化巨集啟發式解 法的測試例題與績效評量標準。 2. 混合演化巨集啟發式解法應用於 VRPTW 之架構設計 依據VRPTW 之問題特性、各項限制以及相關文獻蒐集回顧,設計建立混 合演化巨集啟發式解法之解題架構。 3. 混合演化巨集啟發式解法之解題模組建構 針對本研究提出之混合演化巨集啟發式解法之解題架構三大部分:I1插入 法、(μ, λ)-演化策略以及可回溯式門檻接受法,進行執行模組之流程構建,並 利用C#語言撰寫電腦執行程式。 4. 混合演化巨集啟發式解法之測試 將本研究提出之混合演化巨集啟發式解法對國際標竿測試題庫進行解題 績效之測試。 5. 混合演化巨集啟發式解法之測試結果分析 彙整分析本研究提出之混合演化巨集啟發式解法之測試結果與執行績效, 並與國際文獻所提出之目前已知最佳結果比較以評估其解題效率以及應用潛力 。 6. 結論與建議 依據前述步驟所得之結果,提出具體的結論與建議,並研擬未來後續研究 方向與重點項目。
文獻蒐集與回顧 1. VRPTW相關文獻蒐集 2. 演化法相關文獻蒐集 3. VRPTW測試題庫蒐集與建立 混合演化巨集啟發式解法 應用於VRPTW之架構設計 混合演化巨集啟發式解法 之解題模組建構 (μ, λ)-演化策略 可回溯式門檻接受法 結論與建議 混合演化巨集啟發式解法 之測試 混合演化巨集啟發式解法 之測試結果分析 修 正 研究問題界定 圖 1. 1 研究方法與流程
第二章 具時間窗車輛問題文獻回顧
本章介紹歷年來,國際間著名學者研究VRPTW 問題之相關文獻整理。包括 VRPTW 問題之定義;時間可行性之檢驗;求解 VRPTW 之啟發式解法;求解 VRPTW 之巨集啟發式解法;VRPTW 之測試例題等。 2.1 具時間窗車輛路線問題定義 以下是根據Solomon (1983)之硬時窗車輛路線問題之數學模式,第一目標 為總車輛數最少,第二目標為給定總車輛數求總路線距離最短。 K Object 1 min (1)∑ ∑ ∑
i j kcijkxijk Object 2 min (2) k k V y q to subject i i ik k 1,..., :∑
≤ = (3)∑
⎩ ⎨ ⎧ = = = k ik i i n i K y ,..., 1 0 (4) K k n j y x jk i ijk = =0,..., =1,...,∑
(5) K k n i y x ik j ijk = =0,..., =1,...,∑
(6)(
x)
T i j n k K t s b bj ≥ i+ i+ ij −1− ijk , =1,..., =1,..., (7)(
x)
T i n k K t s b tk i i i i k f 0 1 0 1,..., 1,..., , 0 ≥ + + − − = = (8)(
x)
T j n k K t t b k j jk s j ≥ 0, + 0 −1− 0 =1,..., =1,..., (9) n i l b ei ≤ i ≤ i =1,..., (10) K k f s p l t e0 ≤ 0k,p ≤ 0 = , =1,..., (11) n i bi ≥0 =0,..., (12)(
)
i n k K yik = 0, 1 =1,..., =1,..., (13)(
)
i j n k K xijk = 0, 1 , =0,..., =1,..., (14) 變數定義:K:車輛數 qi:顧客i 之需求量 Vk:車輛k 之容量 c :代表車輛k 從顧客 i 到 j 的行駛成本;本研究以旅行距離為其行駛成本 yik:0-1 整數變數;當車輛 k 服務顧客 i 時其為 1,否則為 0 xijk:0-1 整數變數;當車輛 k 從顧客 i 到顧客 j 時其為 1,否則為 0 bi:代表開始服務顧客i 時間 si:代表顧客i 所需服務時間 tij:代表顧客i 到顧客 j 所需的旅行時間 T:為一正值大數 ei:代表顧客i 時間窗之開始時間 li:代表顧客i 時間窗之結束時間 tk0,s:代表車輛k 從場站出發之時間 tk0,f:代表車輛k 抵達場站之時間 e0:路線時限之下界 l0:路線時限之上界 (1)、(2)式為 VRPTW 之目標函數,(1)為總使用車輛數最少,(2)為總旅行 距離最小;(3)式為車容量限制式;(4)式說明每條路線起迄點皆為場站(depot), 且每個顧客點恰被一輛車服務一次;(5)(6)式限制每個顧客點恰被一條路線進入 與離開一次;(7)-(9)保證抵達任意兩顧客的時間不會矛盾,且(7)式為破除子迴 路限制式;(10)式說明運達顧客點時間不能違反時間窗限制;(11)說明每條路線 不能違反場站之時間窗限制;(12)為邏輯限制式,開始服務時間不得為 0;(13)(14) 式為二元限制式。 假設由顧客i 運送到顧客 j,則開始服務顧客 j 的時間 bj = max[ej, bi + si +tij], 即當車輛在時間窗下界ej之前抵達顧客點j 時(bi + si + tij < ej),須等到時間下界 方可開始服務,而產生等待時間wj = ej - (bi + si +tij)。 2.2 具時間窗車輛路線問題解法回顧 以下就求解VRPTW 之時間可行性檢驗、路線建構式啟發式解法、路線改 善法、巨集啟發式解法等三個部份進行文獻回顧。 2.2.1 時間可行性之檢驗 VRPTW 中的顧客點具有時間窗的限制,當顧客插入一路線中,必須逐一 檢查此顧客以及其後受到影響之顧客是否違反時窗上界,以決定此顧客插入此 位置之時間可行性(Time Feasibility),Solomon (1983, 1987)提出檢查時間可行性 之充分必要條件,茲簡要說明如下: 如圖 2. 1 所示,假設將顧客 u 插入路線 i 中的第 p 點之前,即路線 i (0, 1, 2, …, p-1, p, …, m)中 p 和 p-1 之間,其中 0=m=depot,1≤p≤m。bp為開始服務 顧客 p 之時間,bpn為插入顧客後,開始服務顧客 p 之新時間。wp為在顧客 p 之等待時間。因此插入顧客 u 之後,顧客 p 開始服務時間之後推時間項(Push
Forward)為: PFp = bpn - bp ≥ 0, PFr+1 = max{0, PFr - wr+1}, p ≤ r ≤ m-1, 時間可行性之充分且必要條件為:bu ≤ lu 且 br + PFr ≤ lr, p ≤ r ≤ m。 depot p-1 圖 2. 1 時間可行性示意圖 對插入點u 及之後各點 ir逐一檢查時間可行性,直到路線迄點。但在檢查 過程中,若遇到下列二種情形即可停止:(1)遇到 PFr = 0 時,p ≤ r ≤ m,提前確 定時間可行。(2)在顧客 r 違反時間窗上界,提前確定時間不可行,p ≤ r ≤ m。 2.2.2 路線構建式啟發式解法 1. 節省法
屬於循序構建啟發式解法。Solomon (1983, 1987)延伸 Clarke and Wright (1964) 原運用在VRP 之節省法,將其應用在 VRPTW 上。此法根據成本節省值大小依 序將兩顧客點之節線加入路線中,直到所有顧客都分配到路線中為止。開始構 建路線時,將第一條節線加入路線後,選擇時間上界較早的顧客點為第一點, 以決定路線方向。節省值公式為sij = ci0 + c0j - Qcij其中Q 為路線形狀參數。每 一節線加入的步驟皆須檢查是否違反容量及時間可行性。此外由於時間窗使得 路線之合併需考慮順序的問題,如圖 2. 2 所示。 圖 2. 2 節省法路線方向衝突示意圖 i、j 分別位於兩條路線的端點,由於路線有方向,若欲將(i, j)加入路線中, 必須兩條路線的方向不衝突始可加以合併,如上圖之(1)、(3)兩種情形可行,(2)、 (4)兩種情形因為路線方向衝突,故不可行。除此之外兩條子路線必須符合下列 條件才可以合併: [er, lr] u [eu, lu] p [ep, lp] r
a. i 和 j 在不同的子路線中。 b. i 和 j 皆非路線的內部點(Interior Point),即須為路線之端點。 c. 兩子路線合併後的需求量不可超出車輛容量。 d. 兩子路線之方向需可行,且合併後各顧客點到達時間需符合時間窗限 制。 e. 加入(i, j)後若造成在 j 點之等待時間過長則不採用(i, j),即 wj ≤ W,W 為事先設定之最大等待時間。 2. 時間導向最近鄰點法 屬於循序構建啟發式解法。由Solomon (1983, 1987)提出,其概念如下:由 場站(Depot)開始,找最近鄰點加入路線末端,以擴大路線。即假設 i 點為路線 末端,j 點為未排程點,找 cij最小之j 點(最近鄰點),將 j 點接到 i 點之後。但 此點加入後需滿足車輛容量限制與時間窗限制,若在未排程之所有點中皆無法 找到可行點,則構建新路線,直到所有顧客點都排入路線為止。最近鄰點的指 標 cij考慮空間與時間因素,包括兩顧客點間的距離 dij、在i 點完成服務後到 j 點開始服務前所經過的時間 Tij(即旅行時間加上停等時間)、以及抵達 j 點後 離時間窗上界之剩餘時間uij。以數學式表示如下: cij = δ1dij + δ2Tij + δ3uij, δ1 + δ2 + δ3 = 1, δ1 ≥ 0, δ2 ≥ 0, δ3≥ 0 其中Tij = bj - (bi+si), uij = lj - (bi + si + tij) 由於 Solomon (1983, 1987)提出時間導向最近鄰點法主要是以循序方式進 行路線構建,近年來有若干的研究(王生德, 2003)將循序構建的鄰近點法,稍做 變化改由平行方式進行路線構建。由於傳統鄰點法僅以距離為考慮因素,而 Solomon (1983, 1987)提出的時間導向最近鄰點法又考慮過多權重因子,增加許 多無謂的計算。為了因應VRPTW 的特性,改良式鄰點法可以將時間窗類型問 題所考慮到的因子,如:距離、時間窗上界以及停等時間等,直接納入考量, 以減少許多無謂的計算。循序法的觀念在於:一條路線構建完畢之後再構建另 一條新的路線,直到所有需求點皆已納入所有路線為止;而平行法的觀念在於: 可以同時構建多條路線,直到所有需求點皆已納入所有路線為止。 3. 插入法 屬 於 循 序 構 建 式 啟 發 式 解 法 。Solomon (1983, 1987) 將 插 入 法 應 用 於 VRPTW,其使用兩階段構建路線,發展出三種不同的插入法。其中第一種插入 法:I1 插入法,第一階段對於尚未排程之顧客點,選取各點的對應路段(插入 位置)。第二階段選擇最佳之顧客點以插入其對應路段中。假設(i0, i1, i2,…, im) 為目前正在構建中的路線,u 為未排程的顧客點,第一階段以 c1(i, u, j)來決定其 在目前路線中之最佳插入位置,選擇最佳插入位置之準則如下式所示:
c1(i(u), u, j(u)) = min[c1(ip-1, u, ip)], P = 1,…,m
c1(i, u, j) = α1c11(i, u, j) + α2c12(i, u, j), α1 + α2 = 1, α1 ≥ 0, α2 ≥ 0
其中c11(i, u, j) = diu +duj - βdij, c12(i, u, j) = bju - bj , bju為插入u 後,開始服務顧客 j 的時間 因為將u 插入 i, j 中將影響 j 及 j 之後各點的抵達時間,因此需檢驗 j 以及 j 之後各點之時間可行性。 第二階段以c2(i, u, j)選擇最佳之 u 點以插入路線中,選擇最佳點之準則如 下式所示:
c2(i(u*), u*, j(u*)) = max[c2(i(u), u, j(u))],
u 為尚未排程顧客點中之可行點 當無法找到任何可行點時,則構建新路線,直到所有顧客皆排程為止。 c2 (i, u, j) = γd0u –c1 (i, u, j), λ ≥ 0 第一階段對於一個尚未排程的顧客點來說,最佳的可行插入位置為使插入 後所增加的距離和時間的權重組合最小的位置。第二階段則將u 插入路線中的 插入節省值最大化,例如當α1 = λ = 1 且α2 = 0 時,c2(i, j, u)即為 u 在距離上的 插入節省值。 4. 時間導向掃描法 屬 於 循 序 構 建 式 啟 發 式 解 法 。Solomon (1983, 1987) 將 掃 描 法 應 用 於 VRPTW,第一階段,將所有顧客分成數個區間,每個區間之顧客需求量不超過 車輛容量。第二階段,應用插入法分別對每個區間的顧客服務,並檢查時間可 行性,若有顧客無法排程(無法滿足時間窗限制或路線時限限制),則先排除此 顧客點。每個區間皆排程後,若所有顧客點皆已服務,則完成構建路線;若有 某些顧客尚未被服務,則由原區間之一半開始,沿原掃描方向進行掃描,將剩 餘尚未服務之顧客點重複掃描-排程的步驟,直到所有顧客皆被服務。 5. 修正插入法
Potvin and Rousseau (1993)提出,以 Solomon (1983, 1987)的循序節省插入 法為基礎,發展平行路線構建的插入法,並修正第二階段選擇最佳點的準則。
開始必須先決定路線數,先以循序節省插入法來預測路線數N,之後選擇 N 個距離場站最遠點為各路線之種子點。
第一階段,對於每個未排程的顧客點,首先計算其在每條路線中的最佳插 入位置,選擇最佳插入位置之準則如下式:
c1r(i, u, j) = α1c11r(ir, u, jr) + α2c12r(ir, u, jr), α1 + α2 = 1, α1 ≥ 0, α2 ≥ 0,
此處c11r(ir, u, jr) = dir,u +du,jr - dir,jr ; c12r (ir, u, jr) = bjr,u - bjr
第二階段,選擇最佳之u*,選擇最佳點之準則如下所示: c2(u*) = maxu[c2(u)],
c2(u) = Σr≠r'[c1r*(ir(u), u, jr(u)) - c1r'*(ir'(u), u, jr'(u))],
此處c1r'*(ir'(u), u, jr'(u)) = minr=1,…,nr[c1r*(ir(u), u, jr(u))],
將u*插入 ir'(u*)與 jr'(u*)之間,重複此步驟直到所有顧客都排程為止。構建
路線完成後可以將原路線數減少,再次執行以上步驟,以檢查是否能以較少的 車輛數來服務所有顧客點。若還有些顧客未能排程,則將原路線數增加,再執 行以上步驟,以獲得可行解。
此方法的c1r(ir(u), u, jr(u) )與 Solomon (1983, 1987)的定義相同,為路線排程
與時間延遲的權重組合。而 c2(u)則是一般化懊悔指標(Generalized Regret
Measure),懊悔指標意指最佳插入位置與其他插入位置之成本差距總和。若不 將最佳的顧客立即插入其最佳路線,在下一步驟可能造成損失。即對於u 來說, 其最佳的插入路線位置是(ir'(u), jr'(u)),若不立即將 u 插入此位置,在下個迭代
後可能因路線改變,而必須選擇其它位置,因而造成的損失。此想法為對於某 未排程顧客點而言,在所有路線中只有一條路線插入後的成本較小,插入其它 路線的成本皆很大時,先處理此顧客點將會比較有利,因為其選擇性小;相對 的,若對此顧客點而言,可以插入的路線很多且成本皆差異不大時,則此顧客 點可以稍後考慮,因其選擇性多。
Potvin and Rousseau (1993)測試後發現在均勻分佈顧客點(R 型)及半群聚 顧客點(RC 型)的例題中,修正插入法比插入法表現要好;但在分群顧客點 (C 型)的例題中,則插入法表現較修正插入法好。 2.2.3 路線改善法 VRPTW 之路線改善法是以傳統 VRP 之路線改善法為基礎,傳統 VRP 之 交換改善法進行交換時需符合車輛容量限制方為可行解,VRPTW 問題因為顧 客點之時間窗限制與路線最大時限限制,進行節點或節線交換後的解需符合時 間窗限制及路線時限限制方為可行解。Campbell and Savelsbergh(2004)對符合時 窗限制以及路線時限限制有詳盡的說明。
對於目標函數(C(x))的定義,VRP 的目標函數為總路線距離;而 VRPTW 則考慮車輛數、總路線距離與總排程時間,Chiang and Russell (1997)對定義其 目標函數P1m+P2(β1D + β2T),其中 m 為使用車輛數,D 為總路線距離,T 為總
排程時間,P1 » P2,以強調使用車輛數優先考慮,(β1, β2) = (1, 0)。
正其目標函數,以及加入時間可行性檢驗模組。以下介紹可應用於VPRTW 之 傳統VRP 路線改善法。 (1) K-Opt 節線交換法 K-Opt 節線交換法係由 Lin (1965)所提出,其中 K 表示每次交換的節線數, 一般常被使用的 K 為 2 或 3。此交換法原先設計來用於 TSP 問題上,而對於 VRP 問題而言﹐可用於各路線內的節線交換。茲以圖 2. 3(a)為例,說明 Lin (1965) 所提出2-Opt 單一路線的解題觀念: 圖 2. 3 2-Opt 節線交換法解題觀念 資料來源:Tarantilis et al. (2001)
由圖 2. 3 知,若換掉原路線其中(i, i+1)及(j, j+1)兩條節線,然後連接(i, j) 及(i+1, j+1)兩條節線,將有可能改善其解。而 2-Opt 節線交換法的解題架構亦 可用於路線間之節線交換,如Tarantilis et al. (2001)所採用之方式,茲以圖 2. 3 (b)表示其解題概念,可知路線間之 2-Opt 節線交換法是在兩條不同之節線各抽 出一段節線,重新連結而完成兩條新的路線。2-Opt 節線交換法的解題架構即 根據以上觀念:對任一路線,可依以上方式交換路線上任兩條不相鄰的節線, 然後檢查交換後的解是否優於交換前的解。若是,則更新解;否則維持原解, 繼續交換其它兩條節線直到所有可能交換的節線對都檢查完畢為止。但此種交 換方式會造成某些節線需要反轉的情況。故Potvin and Rousseau (1993)提出一 路線不須反轉之2-Opt*交換法,如圖 2. 4 所示。
圖 2. 4 2-Opt* 節線交換法解題概念
資料來源:Potvin and Rousseau (1993)
由上圖知,將原路線中(i, i+1)及(j, j+1)兩條節線換掉,並連接(i, j+1)以及 (j, i+1)兩條節線,則可不須反轉路線方向。 (2) Or-opt 由於 2-Opt 或 3-Opt 的交換方式都會造成某些節線連接方向需要反轉的情 形,徒增計算上的負擔,因此在Or (1976)提出了所謂的 Or-Opt 節線交換法。 該方法可算是 3-Opt 的一種變型,由於不需要對任何一段之節線作反轉,因此 提高了程式執行的效率。此交換法原先之設計與K-Opt 類似,適用於 TSP 問題 上,對於VRP 以及 VPRTW 問題而言,可用於各路線內的節線交換。其解題觀 念如圖 2. 5 所示: 圖 2. 5 Or-Opt 節線交換法解題觀念 如圖 2. 5(a),若換掉原路線其中(i - 1, i)、(i + 1, i + 2)及(j, j + 1)三條節線,
再連接(i - 1, i + 2)、(j, i)及(i + 1, j + 1)三條節線而成為改善後之路線,將可能 改善其解且不必反轉節線。其中,點 i - 1 到點 i + 2 之間的點可以為一至三點。 如圖 2. 5 (b)即為一個點之範例。Or-Opt 的解題架構即根據以上觀念:對任一 路線,可依圖 2. 5 的方式交換路線上任三條不相鄰的節線,然後檢查交換後的 解是否優於交換前的解。若是,則更新解;否則維持原解,繼續交換其它三條 節線直到所有可能交換的節線對都檢查完畢為止。 (3)保持方向性之路線內 3-exch(Orientation-Preserving 3-interchange)
Gendreau and Pesant (1999)提出,其交換概念比 Or-opt 交換概念更進一步, 如圖 2. 6 所示。
圖 2. 6 保持方向性之路線內 3-exch 節線交換法解題觀念
令圖 2. 6 為 VRPTW 解之其中一條路線解,將路線內中任意三條相鄰節點 之節線打斷,即將I 點與 I+點、J 點與 J+點以及 k 點與 k+點間之節線打斷。其 中Depot 與 I 點、I+點與 J 點、J+點與 k 點、k+點與 Depot 點可以重疊,再將 I 與J+、K 與 I+以及 J 與 K+間之路段互相連結即可。該特色在於維持顧客服務 的順序下,進行路線節線順序的交換。在進行節線交換時,無需將節線上之顧 客順序反轉,只需將節線順序對調即可。此方法的優點在於交換時避免路徑反 轉,在搜尋時,可以搜尋所有符合時間窗之可行解。
(4) λ-interchange
Osman (1993)將(1-0)節點交換法稱為一個轉移過程(Shift Process),而將(1-1) 及(1-2)節點交換法稱為λ-路線間節點交換法。茲以(1-0)節點交換法來說明 λ-interchange 之概念。令圖 2. 7(a)為 VRP 解之其中二條路線,若將節點 i 插入 到的節線(j, j + i)之間,且仍滿足車輛容量限制,而成為圖 2. 7(b)的二條新路線。
圖 2. 7 1-0 節點交換法之解題觀念 資料來源:Tarantilis et al. (2001) 圖 2. 8 為 1-1 節點交換法之解題概念,將節點 i 與節點 j 交換,產生新的 路線解。 圖 2. 8 1-1 節點交換法之解題概念 資料來源:Tarantilis et al. (2001) 2.2.4 綜合型構建/改善法 Russell (1995)提出綜合型構建/改善法,不同於傳統改善法先構建完路線後 再進行路線改善,綜合型構建/改善法的精神為構建一部份路線即進行路線改 善,再將路線擴大後,再進行路線改善,直到路線完成後再對完整的路線進行 一次路線改善。以下說明綜合型構建/改善法之步驟: 首先要決定起始路線數N,之後選擇 N 個種子點,暫時將各種子點指派給 各路線,當有顧客點插入此路線後即將種子點由路線中刪除。未排程顧客點依 一定的順序插入路線中,根據顧客插入順序,決定此顧客點之最佳插入位置:
c1r*(ir(u), u, jr(u)) = minr=1,…,N[α1c11r(ir, u, jr) + α2c12r(ir, u, jr)]
此處c11r(ir, u, jr) = dir,u +du,jr - dir,jr;c12r (ir, u, jr) = bjr,u – bjr
即尋找u 在各路線中距離與時間權重組合之最佳插入位置。插入之位置需 符合時間窗限制。當插入之顧客數達到總顧客數之10%時,對目前之路線進行 交換改善法。重複以上步驟直到所有顧客點皆檢查過一遍,若還有顧客點無法
找到插入位置,則採用Solomon (1983)插入法將剩餘顧客點排程。最後可試著 將起始路線減少一條再重複上述步驟對所有顧客點進行排程。
2.2.5 巨集啟發式解法 1. 鄰域搜尋之概念
上述各種路線改善法雖有不同的設計理念,仍均屬於傳統的鄰域搜尋之解 題 架 構 。 傳 統 的 鄰 域 搜 尋(Neighborhood Search) 亦 稱 為 「 局 部 搜 尋 (Local Search)」,即是在現解 S 的「鄰域(Neighborhood)」中搜尋下一個可行解 S'。 所謂鄰域,Nλ(S),乃是現解 S 之所有「鄰解(Neighbors)」所成之集合;而鄰解 則是指可經由變換現解S 之λ個元素所形成之新的可行解 S'。以 2-Opt 節線交換 法為例,鄰解S'即是由更換現解 S 中的兩段節線而產生。從現解 S 轉變成鄰解 S'的過程,稱之為「移動(Move)」;移動會引起目標值的改變。可行解與其鄰 域聯集形成的解空間,稱之為「搜尋空間(Search Space)」;不同的鄰域搜尋法 會產生不同的搜尋空間。此外,進行鄰域搜尋時,必須依據「選擇法則(Selection Rule)」來決定現解該移動到那個鄰解。傳統的選擇法則有:(1) 最佳改善(Best Improvement),即將現解移動至所有優於現解之鄰解中,最佳的一個鄰解;與 (2) 首先改善(First Improvement),即將現解移動搜尋過程中找到的第一個優於 現解之鄰解。 由於鄰域搜尋法在移動時採用嚴格的「接受法則(Acceptance Rule)」,亦即 只會接受比現解好的鄰解,若沒有較佳的鄰解則停止搜尋,因此最後會陷入「局 部最佳解(Local Optimum)」而無法自拔。因而近年來啟發式解法的趨勢為結合 傳 統 鄰 域 搜 尋 方 法 與 跳 離 局 部 最 佳 解 之 機 制 , 發 展 巨 集 式 啟 發 式 解 法 (Metaheuristics),以下所要介紹的啟發式解法皆屬於此範疇。 2. 禁制搜尋法 新近發展之啟發式解法最著名的首推禁制搜尋法,此方法最早由 Glover and Hansen (1986)所提出,其觀念是想構建一個智慧型的問題求解程序:在目 前解的鄰域(Neighborhoods)進行搜尋,並應用人工智慧的記憶機制,將已經搜 尋過的解記錄在「禁制名單 (Tabu List)」,以避免重複性或毫無目標的搜尋; 等到整個鄰域都搜尋完畢後,再選擇一個最佳的方向進行移動(Move),以逐漸 逼近最佳解。由此可知,TS 法的關鍵即在於記憶機制的設計,目前發展至今已 形成相當複雜的執行架構,其所應用的高階策略主要包含了以下四個概念。 (一)記憶結構(Memory Structures)管理: 記 憶 結 構 乃 是 TS 法 之 特 色 與 核 心 , 可 分 成 短 期 記 憶 (Short Term/Recency-Based Memory)及長期記憶(Long Term/ Frequency-Based Memory) 兩 種 結 構 。 短 期 記 憶 以 禁 制 列 為 基 礎 , 將 最 近 搜 尋 過 的 解 或 移 動 之 屬 性 (Attributes)紀錄在禁制列,以避免後續搜尋的解重複先前的搜尋途徑。然而,
經過一段禁制期間(Tabu Tenure)之後,禁制的屬性即可恢復自由。此外,短期 記憶亦可利用可望水準(Aspiration Levels)的機制來打破禁制列的限制;亦即當 搜尋的新解優於目前最佳解時,雖然其屬性在禁制列之中,仍允許移動至該解。 至於長期記憶結構則以記錄屬性出現的次數為主,再配合深度或廣度搜尋策 略,以擴大TS 法的搜尋範圍。
(二)深度搜尋與廣度搜尋(Intensification and Diversification Search):
深度搜尋策略係在搜尋過程中將較佳的數個解記錄在精英列(Elite List) 內,當短期記憶搜尋無法改善時,再從精英列中選擇一個解作為下階段搜尋的 起點,重新開始。精英列不一定要紀錄一個完整的解,也可以只紀錄經常出現 的部份解(Parts of Solution)。廣度搜尋策略則需要配合長期記憶結構紀錄搜尋過 程中解或屬性出現的次數,當短期記憶搜尋無法改善時,選擇次數較少之屬性 方向重新進行短期記憶搜尋。計算出現次數時,需乘以一懲罰值(Penalty),以 控制其搜尋方向。 (三)策略交替運用(Strategic Oscillation): 是一個調和深度搜尋與廣度搜尋的機制,藉由臨界水準(Critical Level)來控 制深度搜尋與廣度搜尋的切換時機。 (四)搜尋路徑連結(Path Relinking): 先設定一個目標解(Guiding Solution),然後藉由深度搜尋、廣度搜尋與渴 望水準控制搜尋路徑朝向目標解前進。 3. 演化法 演化法主要為利用生物演化,物競天擇的概念,設計出一套演化策略,模 擬生物演化的過程,進而發展出來的巨集啟發式解法。如基因演算法以及結合 演化策略的演化巨集啟發式解法等,都屬於此類。 一開始基因演算法的主要觀念由Holland (1975)所提出,而 De Jong (1975) 以及 Goldberg (1989) 將基因演算法應用於複雜的問題。概念為模仿染色體 (Chromosomes)的複製(Reproduction)、交配(Crossover)、突變(Mutation)、優勝 劣敗(Suvival)等機制,來求解問題。而 Thangiah et al. (1991)為第一位應用基 因演算法於求解VRPTW 問題,之後便有許多專家學者開始研究各式各樣將基 因演算法應用於VRPTW 之問題。到了 Homberger and Gehring (1999)提出了 利用演化策略如(μ, λ)-演化策略等,來求解 VRPTW 問題。並提出了演化巨集 啟發式解法的概念,用以統稱所有利用演化法概念之巨集啟發式解法。爾後便 有更多的專家學者應用其概念,發展出許多演化巨集啟發式解法。 4. 門檻型演算法 此類方法 Fisher (1995)稱之為包容性搜尋法,其觀念乃是在鄰域搜尋陷入 局部最佳解時,採取較鬆的接受法則,亦即接受劣於現解之鄰解,以便脫離局
部最佳解的束縛而繼續搜尋下去。模擬鍛鍊法(Simulated Annealing, SA)、門檻 接受法(Threshold Accepting, TA)、大洪水法(Great Deluge Algorithm, GDA)與記 錄更新法(Record-to-Record Travel, RRT)皆屬於這類方法。這類方法之基本觀念 乃是在鄰域搜尋陷入局部最佳解時,採用較鬆的接受法則(通常為一門檻值)接 受列於現解之鄰解,以便脫離局部最佳解的束縛而繼續搜尋下去。SA、TA、 GDA 與 RRT 等方法的執行架構與傳統鄰域搜尋法架構類似,差異之處僅在於 使用的接受法則不同。傳統的鄰域搜尋法僅接受較佳的鄰解,門檻型演算法可 接受暫劣解之鄰解。 模擬鍛鍊法的基本觀念最早是由 Metropolis et al. (1953)所提出,然後由 Kirkpatrick et al. (1983)加以應用到組合最佳化問題之求解上,因而產生了目前 所謂的模擬鍛鍊法。SA 採用機率性的接受暫劣解法則,利用一個隨機產生的 數值與門檻值做比較,此門檻值是鄰解與現有解之目標值差額與溫度的函數, 亦即鄰解與現解的差值越大,則此鄰解被接受的機率越小;此處所問「溫度」 對 SA 而言是一個抽象的觀念,僅作為控制門檻值高低的參數;降溫則是為了 使SA 能夠逐漸收斂。Li and Lim (2003)使用模擬鍛鍊法對 VRPTW 問題進行 求解,在車輛數方面其結果有不錯的表現。而Li and Lim (2001)使用模擬鍛鍊 法對時間窗收送貨車輛路線問題進行求解,其結果亦有不錯的表現。
TA 的觀念源自 SA,但是此方法採用確定性的接受法則,只要鄰解與現解 的差在門檻值以下就接受,其執行方式更為簡單,圖 2. 9 說明 SA 與 TA 接受 法則之差異。Dueck and Scheuer(1990)發表 TA 法時,以一個 442 節點的 TSP 例題來驗證其可行性,結果顯示TA 可以在很短的時間內找到相當不錯的解。 Dueck(1993)又根據 TA 的觀念衍生出兩個新的方法:GDA 與 RRT。 圖 2. 9 TA 與 SA 接受暫劣解機率之比較 資料來源:韓復華、卓裕仁(1998) 模擬鍛鍊法(SA)、門檻接受法(TA)、大洪水法(GDA)與紀錄更新法(RRT) 等方法的執行架構與傳統鄰域搜尋架構相似,其差異處在於其使用的接受法則 不同。傳統的鄰域搜尋法僅接受較佳的鄰解,包容性搜尋法則可接受暫劣之鄰 TA SA 接受機率 1 0 門檻值(T) 暫劣解的差值 實線表示 TA 虛線表示 SA 0 ‧ ‧
解。現就以大洪水法來說明包容性搜尋之概念,大洪水法原本是設計用以求解 最大化問題,因此以最大化問題做說明較容易了解:想像在一個有高低起伏的 地面上,不停地下著大雨,假設下雨的速度吾人可以控制,地上的水面將隨著 大雨往上升。我們希望在露出水面的陸地上找到高地,一旦找到了就讓水面上 升一固定高度。這時原來在水面上的部份陸地,將被雨水所淹沒,而吾人在移 動時,僅考慮露出水面的陸地。如此不停地找尋高地,直到找到地面上最高的 山峰或無法再找到更高的高地為止。 對一個最小化的問題而言:可將原來的高地想像成窪地,而水面則如水庫 洩洪一般由高處往低處下降。圖 2. 10 為大洪水法之解題概念示意圖。假設我 們現在的位置為圖中之 A 點,並將水位設於 WL1。接著開始找尋「窪地」, 設找到圖中B 點﹐便將水位下降 D 的高度至 WL2。此時水面 WL2 下的所有範 圍皆為吾人找尋並可接受「窪地」的範圍,包括不是很低的C 點。如此不斷地 搜尋「窪地」及下降水面(至 WLn),直至找到水面下最低之山谷(E 點)或無法再 找到更低點為止。 圖 2. 10 大洪水法解題概念示意圖 資料來源:韓復華、卓裕仁(1998) 而TA、GDA 與 RRT 的觀念均來自 SA,在接受法則上面也有所不同,SA 的接受法則為不確定性接受法則,而TA、GDA 以及 RRT 均採確定性接受法則。 以圖 2. 11 示意圖說明 TA、GDA 與 RRT 等方法之接受法則異同。簡單而言, TA 法事先產生一組固定的門檻值數列(通常為遞減),依次使用數列中的門檻 值,其接受法則為C(Xnew) < C(Xcurrent) + Tk;GDA 法設定ㄧ個起始水位, 只要有改善就降低水位(固定的下降速度),其接受法則為 C(Xnew) < L;至於 RRT 法則是將目前的暫優解設為紀錄值,取紀錄值之固定百分比率作為門檻 值,其接受法則為C(Xnew) < C(Xcurrent) + Rxp。
B
搜尋軌跡
DC(X)
D
D 1 WL WL2 WL4 : : : WLnC
WL 3 D WLn-1 DA
E
圖 2. 11 TA、GDA 與 RRT 接受法則示意圖 資料來源:韓復華、卓裕仁 (1998) 表2.1 以最小化問題之求解說明 SA、TA、GDA 與 RRT 等方法重要步驟之 異同。其中「控制參數」指用以控制演算法執行與停止之參數;「接受法則」 為判斷是否從現解S 移動至某鄰解 S'之準則,傳統之路線改善法採取嚴格的「接 受法則」,即當交換後的可行解之目標值低於原有解時(C(S') < C(S)),才接受 此解。包容性解法則可接受暫劣之鄰解;「收斂法則」是為確定搜尋過程會收 斂,在現解移動後對其控制參數進行調整之方式;「停止法則」則規範演算法 停止搜尋之標準。其中,C(S)為現解 S 之目標值,C(S')為鄰解 S'的目標值。有 關TA、GDA 與 RRT 的理論與執行細節,請參見楊智凱(1995),韓復華、張靖 (1996),韓復華、卓裕仁(1996)以及陳國清(1998)等文獻。 表 2. 1 SA、TA、GDA 與 RRT 等方法之比較 方 法 SA TA GDA RRT 控制參數 。溫度(T) 。機率值(0 < r < 1) 。次數(K) 。門檻(T) 。次數(K) 。水位(L) 。速度(D) 。誤差率(p < 1) 。記錄值(R) 。次數(K) 接受法則 機率性接受:
[
]
r C S C S T <exp ( )− ( ') 確定性接受: C(S') < C(S) + T 確定性接受: C(S') < L 確定性接受: C(S') < C(S) + R*p 收斂法則 T遞減 T遞減 L = L - D 更新R值 停止法則 完成K次迴圈 完成K次迴圈 所有C(S') > L 完成K次迴圈 資料來源:韓復華、卓裕仁 (1998) 5. 螞蟻演算法 螞蟻演算法的基本概念是利用螞蟻外出覓食時,會在行經巢穴與食物間的 路徑上,留下一種稱為費洛蒙(Pheromone)的荷爾蒙,因此螞蟻行經一路徑的機 會與該路徑遺留的費洛蒙素濃度成正比,即當有更多的螞蟻走過該路徑時,遺 留的費洛蒙含量就越多,而當費洛蒙素濃度高時,便會吸引更多的螞蟻行走該 路徑。假設螞蟻面臨選擇路徑時,決定行走某依路徑的機率將與遺留在該路徑 的費洛蒙含量關;另外,路徑越短時,螞蟻通過該路段的時間就越短,造成最資料來源:卓裕仁(2001)
短路線上會遺留較高的費洛蒙含量,吸引較多的螞蟻,最後螞蟻將沿最短路徑, 求得最佳解。
螞蟻演算法及在模仿螞蟻覓食的行為,並且利用螞蟻群體合作的原理來解 決問題已獲得最佳決策之搜尋工作。此演算法又稱為蟻群演算法,其最初是由 Macro Dorigo 於 1992 年所提出,當時稱該演算法為螞蟻系統(Ant System, AS), 直到 Dorigo et al. (1999)將此演算法的精神延伸到求解非連續式最佳化問題 上,並命名為ACO,為求解最佳化問題的巨集啟發式方法。在求解的過程是利 用多點搜尋方式跳脫區域解。近年來在國外相關文獻中, Gambardella et al. (1999)以蟻群系統求解時間窗車輛路線問題,結果有不錯的表現。國內亦有陳 家和、丁慶榮(2005)等人利用蟻群系統求解時間窗車輛路線問題。 6. 包容性深廣度搜尋 卓裕仁(2001)提出結合多種巨集啟發式方法的特點與優點,將接受劣解、 變換鄰域、擾動成本與多重起點等巨集策略融合在深度搜尋與廣度搜尋的概念 中,發展出一套「包容性深廣度搜尋(Generic Intensification and Diversification Search, GIDS)」的巨集啟發式方法。
GIDS 法共包含:(1)多起始解構建(Multiple Initialization Constructor, MIC)、 (2)深度化包容搜尋(Generic Search for Intensification, GSI)與(3)廣度化擾動搜尋 (Perturbation Search for Diversification, PSD)三個策略群組。整套 GIDS 法係以傳 統鄰域搜尋為實際執行求解之工具,以深度搜尋之GSI 群組為核心,再搭配廣 度搜尋之 PSD 與 MIC 群組。此外,並設計了此種模組來執行 GIDS 之策略模 組:在 MIC 群組構建有加權起始(Weighted Initialization, WI)模組與鄰域搜尋 (Neighborhood Search, NS)模組;在 GSI 群組設計有 G1 與 G2 兩種包容搜尋 (Generic Search)模組;在 PSD 群組中則構建有成本擾動(Cost Perturbation,) CP 模組。GIDS 之解題概念如圖 2. 12 所示。 多重起點 接受劣解 變換鄰域 擾動成本 起始解構建法 傳統鄰域搜尋法 傳統鄰域搜尋法 多起始解構建 深度化包容搜尋 廣度擾動搜尋 混沌吸子 局部最佳解 限制回圈 巨集策略 基本求解 工具 GIDS策略 群組 欲克服之 求解障礙 圖 2. 12 GIDS 之解題概念架構
2.2.6 (μ,λ)演化策略 (μ,λ)演化策略最早由 Schwefel (1981)所發表,主要為模擬演化之過程,進 行解之演化改善,其中 μ 代表母代個體數,λ 代表子代個體數,並由Homberger and Gehring (1999)將此(μ,λ)演化策略應用於 VRPTW。圖 2. 13 為(μ,λ)演化策 略之示意圖。 MOVE MOVE MOVE MOVE MOVE 繁 殖 評估 適者生存 母 代 子 代 新 母 代 f(xn) f(xn) f(xn) f(xn) f(xn) 適存值 * λ > μ ** f(x)為適應函數 (μ個個體) (λ個個體) 隨機挑選 一個母代 挑選適存 值較佳之 μ個子代 (μ個個體) 圖 2. 13 (μ,λ)演化策略示意圖
資料來源:Homberger and Gehring (1999)
如圖 2. 13 所示,一開始有 μ 個母代,接下來隨機挑選一母代利用鄰域結構 來產生一個不同於該母代之子代,以此方法產生 λ 個子代後,從子代中挑選適存 性較佳之 μ 個,取代原來之母代,在重覆相同之動作,藉以模擬演化之過程。
2.2.7 可回溯式門檻接受法
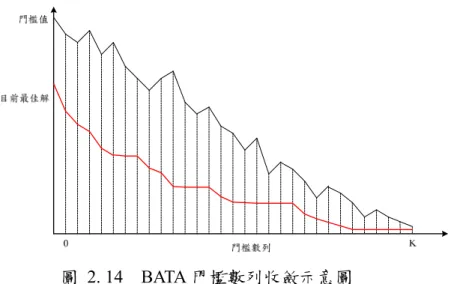
可回溯式門檻接受法(Backtracking Adaptive Threshold Accepting, BATA)是 由Tarantilis et al. (2001)所提出的一種改良式門檻接受法。它與傳統的門檻接受 法最大的不同在於門檻數列的型態:以往門檻接受法的門檻數列皆呈現出逐漸 遞減的型態。而可回溯式門檻接受法在完成一次搜尋迴圈之後,若是有找到至 少一次的可接受解,即可降低門檻;反之,則必須放鬆門檻值再進行交換。如 此門檻數列的型態,便呈現出有增有減而逐漸收斂的情形。如圖 2. 14 所示。
圖 2. 14 BATA 門檻數列收斂示意圖 資料來源:朱佑旌 (2005) 而此方法回溯門檻值的機制,是假設在每次進行鄰域搜尋之後,若在期間 有至少一次移動(找到可接受的解),則減低門檻值;否則即提高門檻值,但不 可超過上一次被接受的門檻值。而其回溯公式為: Tn = Tc + (Tp - Tc) * b,其中 Tn 為得到的新門檻值,Tc為目前的門檻值,Tp為前一次被接受的門檻值;b 則 為門檻回溯的比例值,由此公式可知b 值不得超過 1,以避免違反上述規定。 可回溯式門檻接受法另一個與傳統門檻接受法的差異,在於停止法則除了 達到原先預定的門檻數列長度之外,當已經連續回溯一個預設次數,卻沒有找 到任何一個可接受的解,即直接停止。 可回溯式門檻接受法應用於組合最佳化問題在文獻上還不多見。Tarantilis et al. (2001)提出此方法時,被設計應用於 HFFVRP (Heterogeneous Fixed Fleet Vehicle Routing Problem)。其後,朱佑旌 (2005)則以 BATA 方法設計一套兩階 段可回溯式門檻接受法(TBTA),求解 HVRPBTW (Heterogeneous Fleet Vehicle Routing Problem with Backhauls and Time Windows)。
第三章 混合演化巨集啟發式解法之模式構建
本章節主要介紹此研究提出之混合演化巨集啟發式解法之模式建構流程。於 本章第一節介紹此混合巨集啟發式解法的大架構,並於後續三節分別敘述起始解 模組、第一階段(μ, λ)-演化策略模組以及第二階段:可回溯式門檻接受法模組 之求解流程。 3.1 混合演化巨集啟發式解法求解架構 此研究所提出之混合演化巨集啟發式解法架構圖,如圖 3. 1 所示。各個模 組之目的以及求解方法如下所述。其中Phase I 包含了起始解構建模組。 圖 3. 1 演化巨集啟發式解法架構圖 1. 起始解構建 主要應用目的為構建出多個不同的可行解組合,以供後續第一階段: (μ,λ)-演化策略作為起始解母體。方法為以 Solomon (1983)所提出之利用兩階 段構建路線的 I1 插入法為主要架構,利用調整α1, α2,μ,λ等參數,來控制構 成解的影響因素,產生具有不同的多個起始解。 2. 第一階段:(μ,λ)-演化策略 於一開始利用Solomon (1983)所提出之利用兩階段構建路線的 I1 插入法為 主要架構,利用調整α1, α2,β,γ等參數,來控制構成解的影響因素,產生具有 不同的多個起始解。 將起始解構建出來的母體P(內含 μ 個不同的可行解),利用隨機選擇、鄰 域 結 構(Neighborhood Structure)以及 Homberger and Gehring (1999) 提 出 的 modified Or-opt operator,以極小化使用車輛數為目標,產生 λ 個子代(λ> μ)。接下來將此 λ 個子代挑選出成效較好的 μ 個解,取代原本之母體 P,再重覆進行以上的步驟。 3. 第二階段:可回溯式門檻接受法 應用Tarantilis et al. (2001)所提出之改良式門檻接受法:可回溯式門檻接受 法來對第一階段:(μ,λ)-演化策略所得之暫時解,以極小化總旅行距離為目 標,作更進一步的改善。可回溯式門檻接受法不同一般傳統門檻接收法之處主 要有兩點:門檻數列遞減型態與停止法則。在門檻數列遞減型態方面,當在最 佳化過程中,若發現無法找到可接受的解時,門檻值可回溯(增加),但不可超 過上一次之門檻值。 以下針對各個模組做更進一步的介紹。 3.2 第一階段:起始解模組之建構 如同上述所言,本階段主要目的為產生多個不同的起始可行解。故利用 Solomon(1983)所提出之 I1 插入法,利用不同的起始種子點選擇策略以及 I1 插 入法中參數之組合(α1, α2, β, γ),藉以構建出不同之起始可行解。起始解構 建流程如圖 3. 2。 每一個起始解,首先由選擇三種不同起始種子點選擇策略為基礎,利用最 遠距離、最小時間窗開始、緊急法以及隨機法等,開始讓各個起始可行解產生 差異。以下為各種子點選擇策略之準則。 最遠距離法:在尚未被服務的顧客當中,距離場站最遠之節點為種子點。 最小時間窗開始法:在尚未被服務的顧客中,時間窗開始時間最小之節點 為種子點。 緊急法:則是以每個顧客之時間窗結束時間除以該顧客至場站的距離為一 比值,比值越小代表該顧客是越緊急的顧客。種子點為尚未被服 務之顧客之中,該比值最小者。 隨機法:在所有未被服務的顧客中,以隨機的方式,進行種子點的選擇。 選擇完種子點選擇策略之後,再挑選I1 插入法中 α1, α2, β, γ 之組合。I1 插 入法在第一個階段是先利用α1, α2調整距離以及時間之權重所計算出來之c1(i, u, j)成本。藉以選擇每個未被服務且未違反時間窗以及車輛容量限制之顧客 u,對 於目前排程的路線最適合的插入點。c1(i, u, j)之計算準則如下:
c1(i(u), u, j(u)) = min[c1(ip-1, u, ip)], P = 1,…,m
c1(i, u, j) = α1c11(i, u, j) + α2c12(i, u, j), α1 + α2 = 1, α1 ≥ 0, α2 ≥ 0
其中c11(i, u, j) = diu +duj -βdij,
c12(i, u, j) = bju - bj , bju為插入u 後,開始服務顧客 j 的時間
車輛容量限制之顧客u 以插入路線中,選擇最佳點之準則如下式所示: c2(i(u*), u*, j(u*)) = max[c2(i(u), u, j(u))],
c2 (i, u, j) = γd0u –c1 (i, u, j), λ ≥ 0 若所有未被服務的顧客都不能被插入目前的路線當中,則利用此起始可行 解所選擇之種子點策略,重新構建一條新的路線,再繼續進行I1 插入法,直至 所有顧客皆被服務過。 圖 3. 2 起始解構建流程圖 此階段利用上述之流程重複進行 μ 次,以構建出(μ,λ)演化策略所需之 μ 個起始可行解,作為初始母體,並進入下一個階段。
3.3 第一階段:(μ,λ)演化策略之建構
由於具時間窗車輛問題之績效評估,首要目標為車輛數極小。故本階段利用 Homberger and Gehring (1999)所提出之應用於具時間窗車輛問題之 (μ,λ)演化策 略。
起始解建構模組所得之母體P,再經過從鄰域結構隨機挑選出來的路線間交 換法,進行MOVE 的動作,產生出 λ 個子代(Xn)。而在 Homberger and Gehring (1999)提出來的架構中,更進一步利用一 Reduction 模組來減少車輛數,以獲得車 輛數較少的子代(Xn’)。最後從 λ 個子代中挑選出較優良(適存值較佳)的 μ 個, 取代原來的母體P,進行另外一次的演化,直到找到最小車輛數或者達到一定的 迴圈數。
而在這個階段中用到的鄰域結構,包含了Ninsert, N2-opt*, Nchange。其中Ninsert以
及Nchange,即λ-路線間結點交換法之(1-0)以及(1-1)節點交換法。而 N2-opt*即為2-Opt*
交換法。所有交換的過程中仍需遵守時間窗以及車容量限制。
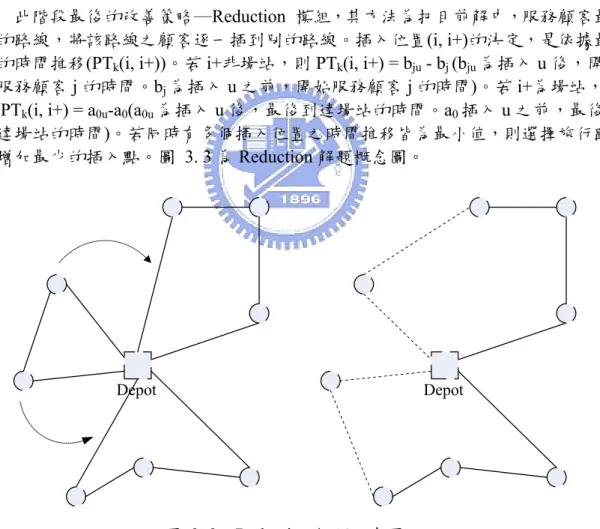
此階段最後的改善策略─Reduction 模組,其方法為把目前解中,服務顧客最 少的路線,將該路線之顧客逐一插到別的路線。插入位置(i, i+)的決定,是依據最 小的時間推移(PTk(i, i+))。若 i+非場站,則 PTk(i, i+) = bju - bj (bju為插入u 後,開
始服務顧客j 的時間。bj為插入u 之前,開始服務顧客 j 的時間)。若 i+為場站,
則PTk(i, i+) = a0u-a0(a0u為插入u 後,最後到達場站的時間。a0插入u 之前,最後
到達場站的時間)。若同時有多個插入位置之時間推移皆為最小值,則選擇旅行距 離增加最少的插入點。圖 3. 3 為 Reduction 解題概念圖。
Depot Depot
圖 3. 4 為(μ,λ)演化策略之細部流程圖。 是 令子代數D = 0 判斷子代是否到達 指定之子代數λ D = λ 從母體P中隨機選出一個解, 設為xp 隨機從2-Opt*, 1-0, 1-1中選出一 種方法,利用xp產生一個新的 可行解,設為xn 利用Reduction 模組來改善xn, 令改善後的xn為新子代 否 從所有λ個的子代中,挑選出 μ個適存性較佳的解,取代母 體 P 之解成為新母體 D = D + 1 結束此世代 世代開始 圖 3. 4 (μ,λ)演化策略流程圖 此階段依據以上之流程,重複執行至到達設定之世代數,求得一使用車輛極 小化之解,帶入可回溯式門檻接受法做最後的改善求解過程。 3.4 第二階段:可回溯式門檻接受法之建構 此一階段以極小化旅行距離為目標,以第一階段:(μ,λ)演化策略所得之暫 時解作最後的改善。圖 3. 5 以及圖 3. 6 分別為此階段之簡化流程圖以及細部流程 圖。
本階段求解流程以Tarantilis et al. (2001)所提出的可回溯式門檻接受法之架構 為基礎。將第一階段所得之暫時最佳解,更進一步利用鄰域搜尋模組以及Reduction 模組進行改善,並利用可回溯式門檻接受模組來控制門檻之修正。 此模組整個執行完一次之後,若在此迴圈之中有發生過接受交換的情形,門 檻值即遞減。而門檻值遞減型態與Tarantilis et al. (2001) 相同,採用等比數列,並 有門檻下降比率r 來控制下降速度;另外,回溯幅度受到門檻回溯比值 b 的控制, 其公式以Tn = Tc + | Tp – Tc| * b 代替。其中 Tp是前一個曾經接受交換的門檻值, Tc為現有門檻值,下一個門檻值為Tn。因此在控制參數方面有起始門檻T0、門檻 下降比率r、門檻回溯比率 b,停止法則為完成 K 次的鄰域搜尋。而最後所得結果 即記錄中之暫時最佳解。 設定K、T0、r、b等參數 k = 0 依序進行交換搜尋模組及 Reduction模組,若交換後之 成本低於門檻,則接受新解 交換過程中, 是否曾接受新解 門檻遞減 門檻回溯 k是否已達到指定之K 是 否 否 是 可回溯式門檻接受法 執行完畢 可回溯式門檻接受法 開始 k = k + 1 K:門檻數列長度 T0:起始門檻比率 r :門檻下降比例 b:門檻下降比例 圖 3. 5 可回溯式門檻接受法簡化流程圖
開始 I<=K 是否曾接受交換 放寬門檻值: Tn= Tc+ |Tp-Tc|* b 結束 T:起始門檻: I: 門檻數列,I = 1, 2, ….K K:門檻數列長度 r:降低比率值 b:放寬比率值 Tp:前一個被接受的門檻值 Tc:現有門檻值 Tn:下一個門檻值 第一階段之暫時最佳解 降低門檻值: Tn= Tc* r Tp= Tc I=1; Tn = Tp= T I=I+1; Tc= Tn 否 否 是 否 是 包容性接受法則 搜尋模組 Reduction 模組 嚴格性接受法則 搜尋模組 Reduction 模組 嚴格性接受法則 搜尋模組 圖 3. 6 可回溯式門檻接受法細部流程圖 上圖為可回溯式門檻接受法之細部流程圖,其中包容性接受法則指只要交換 之後的解,其交換成本小於門檻值,即接受該解。嚴格性接受法則需要交換成本 小於0,才接受該解。其中皆以首先改善(First Improvement),亦即一找到可行之 改善,則馬上接受該新解。而搜尋模組之順序,將於第四章討論。
第四章 混合巨集啟發式解法之測試與分析
第四章首先介紹目前文獻中,主要用來測試其演算法求解效率之例題題庫。 並且就本研究提出之混合巨集啟發式解法中,各部份之參數測試結果與分析。
本研究所有之執行架構皆以 C#進行程式撰寫,並在 Microsoft Visual Studio 2005 中編譯,測試環境為 Windows XP SP2 此一作業系統、CPU 為 AMD Athlon(tm) 64 Processor 3000+的個人電腦。 4.1 具時間窗車輛路線問題測試例題 Solomon(1983)在研究中中為測試 VRPTW 演算法,以 VRP 例題為基礎設計 56 題 VRPTW 例題。此 56 題測試例題皆為單一場站,100 個顧客點,資料結構 為平面座標,顧客點間之旅行時間等於旅行距離。可區分成三種型態:C 型(以 分群方式產生顧客地理資料)、R 型(以均勻分配隨機產生顧客地理資料)、及 RC 型(以半分群方式產生顧客地理資料),以及兩種問題集合:C1,R1,RC1 (路線時限短,車輛容量小)、和R2,C2,RC2(路線時限長,車輛容量大), 因此共可分成六類問題集:C1 (9 題)、R1 (12 題)、RC1 (8 題)、C2 (8 題) 、R2 (11 題)、RC2 (8 題)。本研究亦以此題庫為測試例題。 4.2 起始解模組測試與分析 Solomon I1 插入法其中共有 α1, α2, β, γ 以及種子點選擇策略可以用來構建起 始解,而其中α1 + α2 = 1。種子點選擇策略有以下幾種。 1. 最遠距離法:以未被服務顧客中,距離場站最遠之節點為種子點。 2. 最早開始時間法:以未被服務顧客中,時間窗開始時間最早之節點為種子 點。 3. 緊急法:緊急比率 = 時間窗結束時間與場站之距離,以未被服務顧客中, 以緊急比率最小(最緊急)之節點為種子點。 4. 隨機法:在未被服務顧客中,以隨機選擇的方式,進行種子點選擇。 本研究經過測試,發現各種之組合策略,經過(μ,λ)演化策略後,幾乎沒有 差異,故本研究利用α1 = 0, 0.5, 1、β = γ =1、以及以上四種種子點選擇策略,構建 每個例題12 (3*4)個不同之起始解,之後挑選最佳之 μ 個,以作為(μ,λ)演化策 略所需之母代。
4.3 第一階段:(μ,λ)演化策略之測試與分析
本節針對(μ,λ)演化策略中,產生新解之策略以及(μ,λ)之組合進行探討。 於Homberger and Gehring (2005)所提出之(μ,λ)演化策略過程中,產生新解 完全為一隨機過程,包括隨機挑選母體、交換法,並且只進行一次的MOVE,以 迅速但大量的Iteration 數進行演化的過程。然而本研究依照其流程進行求解,結 果不盡理想,故提出以減少車輛數為目標,針對三個交換法(Ninsert, N2-opt*, Nchange)
設計車輛節省接受法則。希冀能更有效減少車輛數。以下為三個交換法之車輛節 省接受法則。 Ninsert:交換後之兩條路線,其服務顧客數差距須大於交換前之服務顧客數差 距,以讓顧客能集中於少數車輛。例如交換前A 路線服務 4 名顧客, B 路線為 2 名,服務顧客數差距為 2。若交換後 A 路線服務 5 名顧客, B 路線為 1 名,服務顧客數差距增為 4,大於交換前之顧客數差距, 則接受;若交換後A 路線服務 3 名顧客,B 路線為 3 名顧客,服務顧 客數差距減為0,則不接受。 N2-opt*:同Ninsert,交換後之兩條路線,其服務顧客數差距之須大於交換前之 服務顧客數差距。 Nchange:交換後之兩條路線,其載貨量差距須大於交換前之載貨量差距,讓車 容量能更有效地使用。例如交換前A 路線載貨量為 80,B 路線為 50, 差距為30。若交換後 A 路線載貨量為 90,B 路線為 40,差距增為 50, 大於交換前之載貨量差距,則接受;若交換後A 路線載貨量為 70,B 路線為60,差距減為 20,小於交換前之載貨量差距,則不接受。 表 4. 1 為車輛節省接受法則有無之比較,在測試過程當中,母代以及交換法 之選擇仍以隨機方式進行。 表 4. 1 交換法特殊接受法則有無之比較 車輛數 總旅行距離 每題平均 運算時間 (CPU min) 任意接受鄰域新解 451.8 74932.99 4:49 車輛節省接受法則 442.2 75262.62 5:02 附註:μ=10, λ=20, Iteration 數= 5000, 並為十次測試之平均值 由上可知,有特殊接受法則之策略,能較有效減少車輛數,而運算時間以及 總旅行距離並無顯著差異。
之後進行更進一步的測試,如同之前所提到,於Homberger and Gehring (2005) 所提出之(μ,λ)演化策略過程中,每進行一個 Iteration 僅進行一次 MOVE,也就 是若有一次成功的交換即停止,並進行下一個步驟。本研究測試若在一個Iteration 中,進行更多次MOVE,也就是將所有的交換組合搜尋完畢,進行更深度的搜尋, 增加每一個Iteration 之效率,是否能更有效的減少車輛數。表 4. 2 為測試結果。
表 4. 2 Iteration 效率改進測試 世代數 總車輛數 總旅行距離 每題平均 運算時間 (CPU min) 一次MOVE 5000 442.2 76754.62 5:02 多次 MOVE 200 436.3 75262.62 5:57 附註:μ=10, λ=20, 並為十次測試之平均值 以上Iteration 數為在運算時間之考量下,僅進行該 Iteration 數。由表 4. 2 可 知,在一個Iteration 進行更深度的搜尋,雖然在執行時間的考量下造成 Iteration 數較少,但仍能較有效的求解。
接下來測試(μ,λ)之組合,Homberger and Gehring (2005)之研究中利用 μ=10, λ=20 此組組合,但未有更進一步之測試,故本研究針對(μ,λ) = (10, 20), (10, 30), (5, 20)進行測試。 表 4. 3 μ、λ 參數組合測試 (μ,λ) 車輛數 總旅行距離 每題平均 運算時間 (CPU min) (10, 20) 436.3 75262.62 5:57 (10, 30) 436.1 75246.25 12:41 (5, 20) 438.5 75357.37 5:32 附註:多次MOVE,Iteration 數= 200,並為十次測試之平均值 由表 4. 3 知,(μ,λ)組合在(10, 30)時,其十次測試之平均求解效率與(10, 20) 僅減少了0.2 輛車,但運算時間卻為(10, 20)的 2.13 倍;而(5, 20)之運算時間雖然 與(10, 20)只有差距 25 杪,但車輛數十題平均多了 2.2 輛,總旅行距離亦多了 94.75 (distance unit),故本研究選用(μ,λ) = (10, 20)此組組合。 4.4 第二階段:可回溯式門檻接受法之測試與分析 本節針對可回溯式門檻接受法之參數,包含起始門檻比率T0、門檻下降比率 r、門檻回溯比率 b、門檻數列長度 K 以及交換法順序等進行測試。
首先針對交換法之順序進行測試。本研究利用Ninsert, N2-opt*, Nchange等三種交換
法,但其組合順序是否會對求解結果造成影響,於是進行測試,測試結果如表 4. 4。