國 立 交 通 大 學
通訊與網路科技產業研發碩士專班
碩 士 論 文
使用時域頻域聯合通道估測之高效能地面
數位影像廣播接收機設計
High performance DVB-T Receiver design with joint
time and frequency domain channel estimation
研 究 生:吳嘉原
指導教授:吳文榕
教授
使用時域頻域聯合通道估測之高效能地面數位影像廣播接收機設計
High performance DVB-T Receiver design with joint time and frequency
domain channel estimation
研 究 生:吳嘉原
Student:Chia-Yuan Wu
指導教授:吳文榕
Advisor:Dr. Wen-Rong Wu
國 立 交 通 大 學
通 訊 與 網 路 科 技 產 業 研 發 碩 士 專 班
碩 士 論 文
A ThesisSubmitted to College of Electrical and Computer Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master in
Industrial Technology R & D Master Program on Communication Engineering
March 2008
Hsinchu, Taiwan, Republic of China
使用時域頻域聯合通道估測之高效能地面數位影像廣播接收機設計
學生:吳嘉原
指導教授:吳文榕 博士
國立交通大學電機學院產業研發碩士班
摘
要
數位影像廣播與傳統的類比影像廣播相比有許多的優點,如高畫
質、省頻寬和抗干擾能力強等。而接收機設計的好壞決定了系統的效
能高低。本篇論文的目的就是要設計一個高效能的地面數位影像廣播
(DVB-T)接收機。
首先,我們建立一個地面數位影像廣播(DVB-T)系統的完整模擬平
台,包括傳送機與接收機部份。接收機是由內部接收機與外部接收機
構成,前者負責同步,後者則是做錯誤更正解碼。接著我們將重點放
在設計高效能的通道估測法。因為傳統上在頻域做通道估測的方式效
能並非最佳,故我們使用一種新開發的時域頻域聯合通道估測法來解
決此一問題。模擬結果顯示,此通道估測法比起傳統的方法效能較高,
特別對在延遲展延(delay spread)較大的通道下。
High performance DVB-T Receiver design with joint time
and frequency domain channel estimation
Student:Chia-Yuan Wu
Advisors:Dr. Wen-Rong Wu
Industrial Technology R & D Master Program of
Electrical and Computer Engineering College
National Chiao Tung University
Abstract
Compared with traditional analog video broadcast, digital video broadcast (DVB)
has many advantages such as high definition, reduced bandwidth, and high
interference immunity. However, the actual performance greatly depends on the
receiver design. The purpose of this thesis is to design a high-performance DVB-T
receiver. First, we built a complete platform for the DVB-T system, which includes
the transmitter and the receiver. The receiver consists of the inner and outer
receivers; the former conducts synchronization, and the later forward error decoding.
Then, we focus on the design of the high-performance channel estimator.
Conventional approaches for channel estimation is conducted in the frequency
domain, and the performance is not optimal. We use a newly developed joint
time-and-frequency- domain channel estimator to solve the problem. Simulations
show that the channel estimator has better performance that conventional methods,
specially when the channel delay spread is large.
誌
謝
能順利完成本篇論文,首先要感謝我的指導教授吳文榕博士,在課業與研究
上給予我細心的指導,以及教導我正確的研究方法與做事的態度,讓我在這兩
年裡,無論在知識或為人處事上皆受益良多。
感謝我的父母在我求學的路上給我無條件的支持與鼓勵,使我能專心在學業
而無後顧之憂。
其次我要感謝實驗室的學長兆元、志安、祥倫、俊穎,以及我的同學來輝、
聖哲、青洋、怡君等在這兩年研究所生涯中,在學業上與生活上給我的幫助。
最後要感謝許多曾經幫助我、陪伴我的朋友們,由於你們的支持才使我有動
力能繼續前進。
僅以此篇論文獻給所有關心我的師長和朋友們。
吳嘉原
2008 年 3 月
目
錄
中文摘要
………
i
英文摘要
………
ii
誌謝
………
iii
目錄
………
iv
表目錄
………
vi
圖目錄
………
vii
第一章
緒論………
1
第二章
地面數影像廣播系統(DVB-T system)………
3
2.1
系統參數………
3
2.2
傳送機架構………
4
2.3
里德所羅門編碼器………
4
2.4
外部交錯器………
5
2.5
迴旋乘積編碼器………
6
2.6
內部交錯器………
7
2.7
訊號星狀圖與標繪………
10
2.8
訊框建構………
12
2.9
OFDM 調變………
15
第三章
基頻通道模型………
17
3.1
多路徑通道………
17
3.2
載波頻率偏移………
21
3.3
取樣頻率偏移………
22
3.4
加成性白高斯雜訊………
24
第四章
接收機架構與演算法………
25
4.1
接收機架構………
25
4.2
傳輸模式與護衛區間偵測………
26
4.3
符元時間偵測………
30
4.4
分數載波頻率偏移估測………
32
4.5
整數載波頻率偏移估測………
33
4.6
載波頻率偏移之追蹤………
34
4.7
取樣頻率偏移之追蹤………
36
4.8
傳輸參數訊號解調變………
37
4.9
外部接收機………
38
第五章
頻域與時域聯合通道估測………
41
5.1
一維線性內插法………
41
5.3
頻域與時域聯合通道估測………
44
5.3.1
時域通道響應位置搜尋………
44
5.3.2
最小平方法時域通道估測………
45
5.3.3 遞廻式時域與頻域聯合通道估測………
46
第六章
模擬結果………
48
6.1
系統效能模擬-理想狀態下 ………
48
6.2
符元時間偏移模擬………
50
6.3
載波頻率與取樣頻率偏移模擬………
52
6.4
內部接收機 Fixed point 模擬………
54
6.5
通道估測模擬………
56
第七章
結論與未來方向………
63
參考文獻
………
64
作者簡歷
………
66
表目錄
表 2.1
8K mode 與 2K mode 的 OFDM 參數(8MHz 頻寬) …………
3
表 2.2
Puncturing pattern and transmitter sequence ……
7
表 2.3
不同星狀圖之反多工器執行結果………
8
表 2.4
Normalization factor for data symbols ………
12
表 2.5
連續領航訊號載波索引………
13
表 2.6
傳輸參數訊號載波索引………
14
表 2.7
傳輸參數訊號之訊息與格式………
15
表 3.1
F1,P1 通道之功率、相位、延遲參數 ………
18
表 4.1
:高相關度區間長度與傳輸模式、護衛區間對照表………
29
表 6.1
理想狀態下模擬之系統參數………
48
表 6.2
符元時間偏移模擬之系統參數………
49
表 6.3
載波頻率偏移模擬之系統參數………
52
表 6.4
Fixed point 模擬之系統參數 ………
55
表 6.5
通道估測模擬之系統參數………
57
圖目錄
圖 2.1
傳送機系統方塊圖………
4
圖 2.2
里德所羅門編碼示意圖………
5
圖 2.3
外部交錯器………
6
圖 2.4
迴旋乘積編碼器………
6
圖 2.5
內部編碼器………
7
圖 2.6
使用於 16QAM、non-hierarchical 的內部交錯器………
8
圖 2.7
符元交錯位置產生器………
10
圖 2.8
Uniform QPSK,16QAM,64QAM 星狀圖………
11
圖 2.9
Non-uniform(
α=2) 16QAM,64QAM 星狀圖………
11
圖 2.10 連續領航訊號示意圖………
13
圖 2.11 散射領航訊號示意圖………
14
圖 2.12 使用快速傅立葉反轉換做 OFDM 調變 ………
16
圖 3.1
基頻通道模型方塊圖………
17
圖 3.2
F1 通道之脈衝響應………
19
圖 3.3
F1 通道之頻率響應………
19
圖 3.4
P1 通道之脈衝響應………
20
圖 3.5
P1 通道之頻率響應………
20
圖 3.6
取樣頻率偏移示意圖………
23
圖 3.7
取樣頻率偏移造成 OFDM 符元相位變化 ………
23
圖 4.1
DVB-T 基頻接收機系統方塊圖 ………
26
圖 4.2
傳輸模式與護衛區間偵測示意圖………
27
圖 4.3
傳統的傳輸模式與護衛區間偵測結果(2K mode, 1/8 GI)
27
圖 4.4
傳輸模式偵測結果(2K mode) ………
28
圖 4.5
傳輸模式偵測結果(8K mode) ………
28
圖 4.6
傳輸模式與護衛區間偵測流程圖………
30
圖 4.7
符元時間位置與時域信號結構………
31
圖 4.8
符元時間偵測示意圖………
31
圖 4.9
符元時間偵測結果………
32
圖 4.10 分數載波頻率偏移估測原理………
33
圖 4.11 整數載波頻率偏移估測示意圖………
33
圖 4.12 整數載波頻率偏移估測結果………
34
圖 4.13 用於剩餘載波頻率偏移追蹤的 loop filter ………
35
圖 4.14 剩餘載波頻率偏移追蹤方塊圖………
36
圖 4.15 用於取樣頻率偏移追蹤的 loop filter ………
36
圖 4.16 取樣頻率偏移追蹤方塊圖………
37
圖 4.17 TPS 解調變方塊圖………
38
圖 4.18 外部反交錯器………
40
圖 5.1
一維線性內插法所使用的領航訊號………
41
圖 5.2
一維線性內插法示意圖………
42
圖 5.3
二維線性內插法所使用的領航訊號………
42
圖 5.4
時間軸上之領航訊號內插方式………
43
圖 5.5
間軸上之領航訊號內插後的 OFDM 符元 ………
43
圖 5.6
二維線性內插法示意圖………
43
圖 5.7
Tap search 示意圖………
45
圖 5.8
時域與頻域聯合通道估測流程圖………
46
圖 5.9
改良後降低複雜度之時域與頻域聯合通道估測流程圖…
47
圖 6.1
理想狀態下系統效能模擬結果-AWGN 通道………
49
圖 6.2
理想狀態下系統效能模擬結果-Rayleigh 通道…………
49
圖 6.3
符元時間偏移造成的 OFDM 符元相位變化 ………
51
圖 6.4
符元時間偏移造成系統效能衰減之模擬結果………
51
圖 6.5
有載波頻率偏移與理想狀態之系統效能比較圖…………
53
圖 6.6
不同載波頻率偏移下之系統效能比較圖-AWGN 通道……
53
圖 6.7
不同載波頻率偏移下之系統效能比較圖-Rayleigh 通道
54
圖 6.8
使用不同位元數做 Fixed point 模擬之系統效能比較圖
55
圖 6.9
二維內插法做通道估測所得通道頻率響應………
57
圖 6.10 時域頻域聯合通道估測所得通道脈衝響應………
58
圖 6.11 三種不同延遲展延(Delay spread)的通道模型…………
59
圖 6.12 通道估測之系統效能比較-使用通道 A………
60
圖 6.13 通道估測之系統效能比較-使用通道 B………
60
圖 6.14 通道估測之系統效能比較-使用通道 C………
61
圖 6.15 每次遞迴搜尋 Tap 數之系統效能比較圖 ………
62
第一章 緒論
電視廣播數位化已經成為未來的趨勢,傳統的電視廣播是使用類比訊號的調變 技術,藉由高頻無線電波讓訊號在空中傳輸。而這樣的類比傳送有許多的缺點,第一 其抗雜訊干擾的能力較差,導致畫面容易出現雜訊或模糊的現象,第二其抗多路徑通 道效應能力較差,多路徑會造成類比訊號延遲,在畫面上容易出現鬼影,影響收視品 質,最後類比訊號原無法像數位信號般可以被壓縮,而造成頻寬效能的低落。DVB-T(Digital Video Broadcasting-Terrestrial)為現行我國數位電視廣播所
採用的標準,此標準主要為歐洲各國以及其他多個國家所採用之數位電視廣播規格。 其傳送的訊號為經由壓縮及編碼過後的數位影音訊號,經由兩道通道編碼後,使用 OFDM 調變技術來傳送。使用 OFDM 調變技術具有節省頻寬的優點,而且抗多路徑通道 的能力較強。而通道編碼可以將再傳送中發生錯誤的數位信號,做有限度的更正,可 增加傳送的正確率。壓縮過後的數位影音訊號與類比訊號相比,傳送的資料量較少, 可增加提高頻寬使用效益。 由於 DVB-T 為一種傳送影音之無線通訊系統,傳輸影音的品質好壞、接收信號 的能力高低與接收機設計的好壞有相當大的關係。其中基頻接收機內的演算法設計是 影響接收機的效能之一大因素。基頻基頻接收機又可分為內部接收機與外部接收機, 外部接收機主要是做 OFDM 解調變、解映射、解通道編碼,將接收到的 OFDM 符元轉回 數位影音信號,而內部接收機主要是做同步相關的處理,如符元起始偵測,符元大小 偵測,護衛區間大小偵測,載波頻率偏移的估計與補償、通道估計,取樣頻率偏移的 補償等。DVB-T 基頻接收機相關的設計已有相當多的文獻討論[1],[2],[6]-[11]。本 論文的研究重點有二,第一,建立一完整的 DVB-T 基頻系統平台,包含傳送端、通道 模型、接收端,可以快速的模擬整個系統在各種參數條件、訊雜比、通道模型下的傳 輸效能。第二,使用一頻域與時域聯合通道估測法[8]於 DVB-T 內部接收機設計。一 般而言,DVB-T 的通道估測都使用頻域的估測技術,然而此法在通道響應較長時,其
效能會顯著的降低。時域通道估計可以有效的改善此問題,然而傳統的時域通道估計 法不但計算複雜度大且在某些情況下效果不彰。頻域與時域聯合通道估測法[8]經證 明可以有效的改善此問題。 第一章為緒論,介紹研究動機與論文組織;第二章為地面數影像廣播系統,介 紹 DVB-T 系統規格、系統參數與傳送端架構;第三章為通道模型,介紹 DVB-T 規格中 定義的三種通道模型,以及信號傳輸時會發生的數種非理想效應;第四章為接收機架 構與演算法,介紹本文所設計的 DVB-T 接收機架構,以及其中各個模組方塊的功用及 其中所使用之演算法;第五章為頻域與時域聯合通道估測,介紹了兩種傳統的 DVB-T 通道估測方式,並提出一種基於傳統通道估測下加入時域估測之頻域與時域聯合通道 估測的方法;第六章為模擬結果,這章裡我們使用 MATLAB 來模擬整個 DVB-T 的基頻 系統,包括傳送端、通道模型、接收端,以驗證接收機各個演算法的傳輸效能,並對 模擬結果加以討論。
第二章 地面數影像廣播系統(DVB-T system)
2.1 系統參數
˙ 傳輸模式 在 DVB-T 規格中[5],傳輸模式分為 2K 與 8K 兩種,2K 模式是將一個通道 頻寬劃分成 2048 個子通道,並使用 2048 點的快速反傅立葉轉換/傅立葉轉換 (IFFT/FFT)來做 OFDM 的調變與解調;8K 模式則是將一個通道頻寬劃分成 8192 個子通道,其快速反傅立葉轉換/傅立葉轉換使用的是 8192 點。2K 模式實際用 到子通道個數為 1705 個,8K 模式用到子通道個數為 6817 個。有關於兩種傳輸 模式的參數如下表:表 2.1:8K mode 與 2K mode 的 OFDM 參數(8MHz 頻寬)
˙ 通道頻寬 在 DVB-T 規格中,通道頻寬的大小可分為 6MHz、7 MHz、 8 MHz 三種,我 國現有的數位電視是採用 6 MHz 頻寬。 ˙ 取樣週期 取樣週期取決於通道頻寬的大小,6MHz 頻寬下取樣週期為 7/48μs,7MHz 為 1/8μs,而 8MHz 為 7/64μs。 ˙ 護衛區間 護衛區間是為了保護訊號在通過多路徑通道後不會產生符元間干擾效應, 同時運用護衛區間由符元尾端複製的特性,還可以用來偵測傳輸模式、符元起
始點、以及估計小數部分的載波頻率偏移等。護衛區間的長度可分為四種:1/4、 1/8、1/16、1/32。
2.2 傳送機架構
傳送機架構可分為以下幾部分: ˙ 隨機化與能量分散 ˙ 外部編碼器/交錯器 ˙ 內部編碼器/交錯器 ˙ 符元標繪器 ˙ 訊框建構,加入參考訊號 ˙ OFDM 調變 傳送機方塊圖如下: 圖 2.1:傳送機系統方塊圖2.3 里德所羅門編碼器
在 DVB-T 中,使用里德所羅門碼作為外部編碼,使用的是 RS(204,188,t = 8)的 里德所羅門碼,每一次輸入一個 188 bytes 大小的 RS packet 進入 RS(204,188,t = 8) 編碼器,輸出則成為 204 bytes 編碼過後的資料,t = 8 代表其修復錯誤的能力。對 一個 RS packet 而言 RS 解碼器最多可以更正 8 個 bytes 的錯誤。RS(204,188,t = 8) 是由 RS(255,239,t = 8)經由縮短過後而來,實現的方式是將輸入的 188 bytes 前面 加上 51 個 “0”,使其長度成為 239 bytes,在將此 239 bytes 送入 RS(255,239,t =8)編碼器加以編碼後,可得到輸出長度為 255 bytes 的資料,將前面第 1~51 個為”0”
的 bytes 去掉,剩餘的 204 byte 即為 RS(204,188,t = 8) 編碼後的結果。里德所羅
門編碼的示意圖如下:
188 bytes data
加入 51 個”0” ↓
51zeros 188 bytes data
RS(255,239,t=8) ↓
51 zeros 188 bytes data 16 parity bytes
去掉 51 個”0” ↓
188 bytes data 16 parity bytes
圖 2.2:里德所羅門編碼示意圖
2.4 外部交錯器
此交錯器為迴旋位元組交錯器,共有 12 條通道由 First-in-first-out 暫存器 所組成,從第 0 條到第 11 條通道分別有 0*17 個到 11*17 個位元組暫存器,其目的是 要將連續時間的信號打散,以避免連續錯誤發生,增強里德所羅門碼的更正效果。此 交錯器如下圖所示,由圖可知兩個相鄰的位元組經過此交錯器後會相距 12*17=204 個位元組。 圖 2.3:外部交錯器2.5 迴旋乘積編碼器
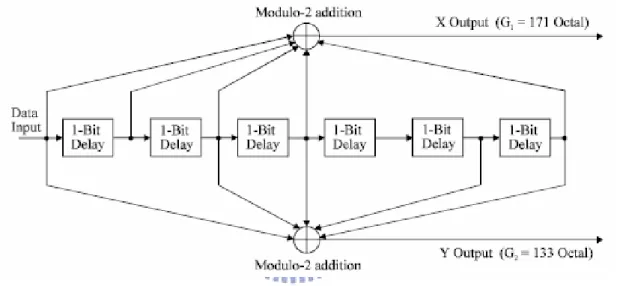
不同於里德所羅門碼以位元組所構成的區塊為單位編碼,迴旋乘積編碼器是將 資料以位元的形式依序輸入一串延遲暫存器,而編碼後的輸出則是這些暫存器所存位 元的線性組合,稱做迴旋乘積碼的產生多項式,在 DVB-T 系統中所使用的是編碼率 1/2,有 64 個 states 的編碼器,其中包含 6 個位元延遲暫存器,而其產生多項式為: G1 = 171OCT G2 = 133OCT 下圖為迴旋乘積編碼器的架構: 圖 2.4:迴旋乘積編碼器 DVB-T 的規格中定義了五種不同的編碼率可以使用:1/2、2/3、3/4、5/6、7/8 等,使用 Puncturing 的方式實現將 1/2 編碼率轉換為其他較高編碼率。舉例來說, 從編碼器輸入三個位元後,得到輸出為 X1Y1X2Y2X3Y3六個位元,若我們欲使用 3/4 的編 碼率,依照規格中所定義 Puncturing 的方式去掉 X2Y3而剩下 X1Y1Y2X3即為編碼率 3/4 的輸出結果。DVB-T 規格中定義 Puncturing 的方式如下表:將 1/2 編碼率的迴旋乘積編碼器連接 Puncturing,即構成 DVB-T 的內部編碼器, 如圖 2.5 所示: 圖 2.5:內部編碼器
2.6 內部交錯器
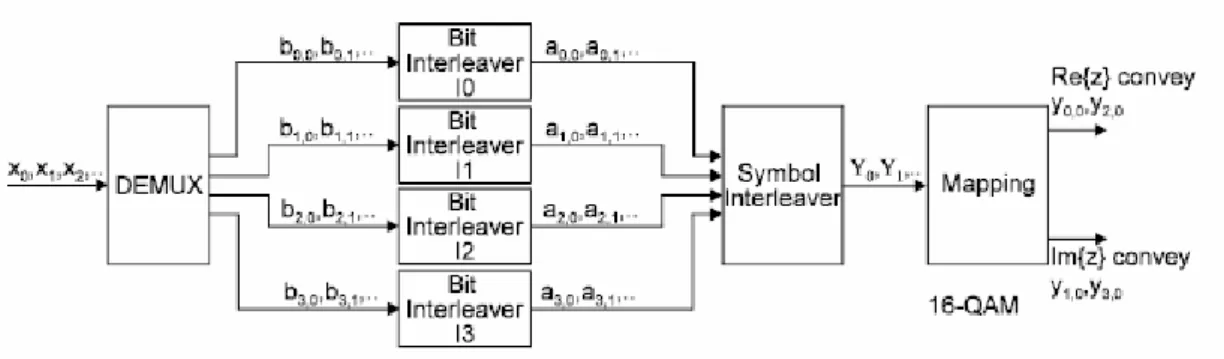
由於在前面的內部編碼器是以位元為單位編碼,所以內部交錯器亦是以位元為 單位將位置打散,以增進內部編碼器的更正能力。內步編碼器共分為三個階段: ˙ 反多工器 ˙ 位元交錯器 ˙ 符元交錯器 圖 2.6 為一非階層 16QAM 內部交錯器的結構:圖 2.6:使用於 16QAM、non-hierarchical 的內部交錯器 ˙ 反多工器 反多工器是將內部編碼器輸出的位元資料依照一個資料符元所帶的位元數分流 成數個位元資料流,如此一來,原本相鄰的位元會被分配到資料符元的中的不同位 置,其抵抗雜訊的能力也不同,可以避免連續錯誤的發生。反多工器的運作方式見下 表: 表 2.3:不同星狀圖之反多工器執行結果 QPSK x0 maps to b0,0 x1 maps to b1,0
16-QAM non-hierarchical 16-QAM hierarchical
x0 maps to b0,0 x2 maps to b1,0
x1 maps to b2,0 x3 maps to b3,0
x'0 maps to b0,0 x"0maps to b2,0
x'1 maps to b1,0 x"1maps to b3,0
64-QAM non-hierarchical 64-QAM hierarchical
x0 maps to b0,0 x3 maps to b1,0 x1 maps to b2,0 x4 maps to b3,0 x2 maps to b4,0 x5 maps to b5,0 x'0 maps to b0,0 x"1 maps to b4,0 x'1 maps to b1,0 x"2 maps to b3,0 x"0 maps to b2,0 x"3 maps to b5,0 ˙ 位元交錯器 在位元交錯器中,反多工器輸出的各個位元資料流以 126 個位元為單位做一次
位元交錯,將每個資料流上的位元在時間上分散,位元交錯的方式由輸入 b 到輸出 a 的運作方式如下: ae,w = be,He(w) w = 0, 1, 2, ..., 125 其中 He(w)代表位元從原本的位置對應到新的位置,而規格中定義每一條資料流 上所使用的 He(w)產生的方式如下: I0: H0(w) = w I1: H1(w) = (w + 63) mod 126 I2: H2(w) = (w + 105) mod 126 I3: H3(w) = (w + 42) mod 126 I4: H4(w) = (w + 21) mod 126 I5: H5(w) = (w + 84) mod 126 w = 0,1,2,…,125 在一個 OFDM 符元之中,在 2K 模式下有 1512 個資料符元,8K 模式下則有 6048 個資料符元,這兩個數字都是 126 的倍數,所以位元的交錯是在 OFDM 符元內進行, 不會有跨越 OFDM 符元的情況產生。 ˙ 符元交錯器 符元交錯器的作用是將位元交錯器在同一時間輸出的位元組合成資料符元並對 應到 OFDM 符元中特定的次載波上,在 2K 模式為 1512 個,在 8K 模式為 6048 個,而 這個對應的次序是經過打亂過的,所以符元交錯器也可以視為次載波的交錯器。而對
於奇數 OFDM 符元與偶數 OFDM 符元的交錯方式是相反的,對於輸入 y’、輸出 y,交
錯的方式如下:
yH(q) = y'q for even symbols
yq= y'H(q) for odd symbols
上式中 H(q)代表符元交換的位置,是由圖 2.7 的符元交錯位置產生器產生而
來。其動作是先從一個 Pseudo Random Binary Sequence(PRBS)產生器產生的位元經
圖 2.7:符元交錯位置產生器
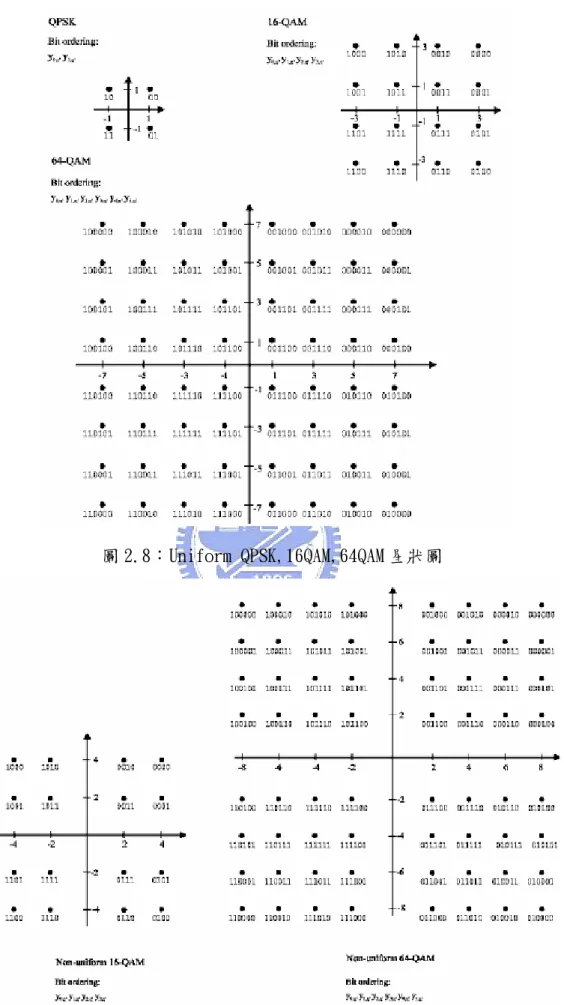
2.7 訊號星狀圖與標繪
DVB-T 規格中規定的星狀圖有 QPSK、16QAM、64QAM 等三種,其中 16QAM 與 64QAM
又可依照階層或非階層傳輸模式與否而有 Uniform(α=1 )與 Non-uniform(α= 2、α
= 4 )之分,位元的安排是採用 Gray mapping 的方式,也就是在星狀圖上相鄰的兩個
位置所代表的資料符元只相差一個位元,如此可以在訊號受到干擾時降低錯誤的位元
圖 2.8:Uniform QPSK,16QAM,64QAM 星狀圖
在做完符元 Mapping 之後必須要對信號做正規化的動作。原因是無論採用何種
星狀圖,傳輸信號的功率大小需是固定的,所以必須將信號的振幅做正規化,以使得
傳送功率相同,星狀圖與正規化係數的關係如下表:
表 2.4:Normalization factor for data symbols
2.8 訊框建構
DVB-T 的 OFDM 訊框是由 68 個 OFDM 符元所組成,在 2K 模式下,一個 OFDM 符元
包含 1705 個次載波,8K 模式下則有 6817 個次載波。四個 OFDM 訊框可組成一個超級 訊框。 在一個 DVB-T 的訊框內的符元可分為兩種:資料符元、及參考信號。加入參考 信號的目的是要讓信號在被接收時能克服通道及其他非理想的效應,使信號能夠正確 的被解出。參考信號有以下三種: ˙ 連續領航訊號 ˙ 散射領航訊號 ˙ 傳輸參數訊號 ˙ 連續領航訊號 連續領航訊號的位置如下表所示,對於每一 OFDM 符元,連續領航訊號接存在於 相同的次載波上,其大小為 4/3,依照 PRBS 決定其相位為 0 或 –π。 表 2.5:連續領航訊號載波索引
連續領航訊號存的用途是使接收端可以依照前後 OFDM 符元上連續領航訊號相位 的變化,可估算出載波頻率偏移和取樣頻率偏移,以幫助接收端進行頻率的同步。圖 2.10 為連續領航訊號的示意圖: 圖 2.10:連續領航訊號示意圖 ˙ 散射領航訊號 散射領航訊號的大小與相位的決定方式與連續領航訊號相同。而在同一個 OFDM 符元中,以頻率軸來看每隔 12 個次載波會存在一個散射領航訊號,在時間軸來看, 則同一個次載波上每個四個 OFDM 符元會存在一個散射領航訊號,散射領航訊號的示 意圖如下:
圖 2.11:散射領航訊號示意圖 散射領航訊號的用途主要是在通道估測上。對一個 OFDM 符元而言,它可以根據 散射領航訊號在頻域及時域之週期特性,以內插的方式估出其通道之頻率響應。其方 式是將不同時間估測出的通道頻率響應,在時間軸上做內插。接著將所插出的頻率響 應在頻率軸上做另一次的內插。如此一來,即使是時變的通道,只要其時域響應不是 很長都可做有效而準確的做通道估測。 ˙ 傳輸參數訊號 傳輸參數訊號存在於特定次載波上,內容則是傳遞此數位影像廣播訊號的各項 傳輸參數,包括訊框編號、訊號星狀圖、階層傳輸資訊、編碼率、護衛區間長度、傳 輸模式等。傳輸參數訊號次載波位置如下表: 表 2.6:傳輸參數訊號載波索引 一組完整的傳輸參數訊號總共由 68 個位元構成,這 68 個位元就分布在同一 OFDM 訊框的 68 個 OFDM 符元的傳輸訊號參數次載波上,換句話說,在傳輸訊號次載波上, 每一個資料符元只攜帶了 1 個位元的資料量,而其調變的方式是採用差分二進位相移 鍵控(DBPSK),由於傳輸參數訊號對於數位影像廣播系統的解調相當重要,所以採用 差分二進位相移鍵控的調變方式可以有效降低錯誤率。傳輸參數訊號其位元所代表的
表 2.7:傳輸參數訊號之訊息與格式 除了採用差分二進位相移鍵控降低錯誤率之外,傳輸參數訊號也使用 BCH 錯誤 控制碼(67, 53, t=2),以期望在解調傳輸參數訊號發生錯誤時,透過解碼還能有錯 誤更正的能力,所以傳輸參數信號在錯誤保護的機制上是相當周全的。
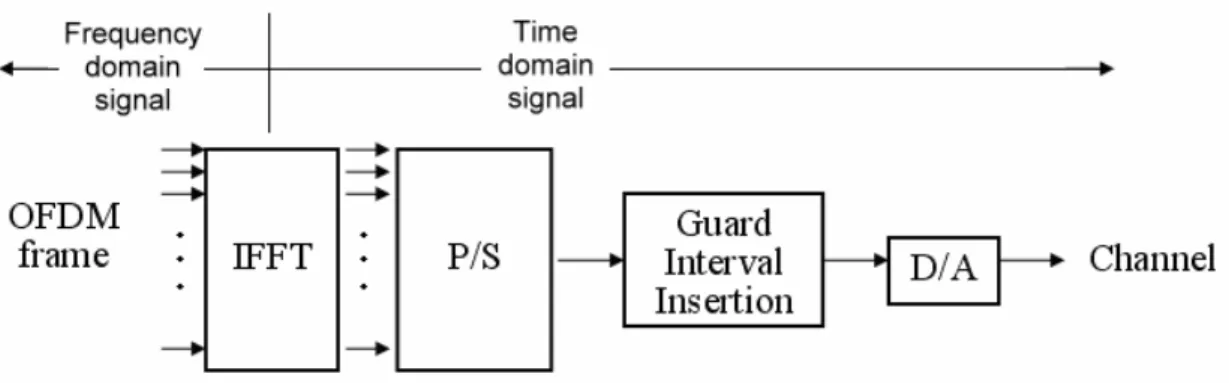
2.9 OFDM 調變
此處是使用快速傅立葉反轉換來實現 OFDM 調變,在傳送端將建構完成的 OFDM 符元視為頻域上的信號,每一個 OFDM 符元中的資料符元或是參考信號分屬於不同頻 率的次載波上,經過快速傅立葉反轉換後,便將頻域的信號轉換到時域上。轉到時域 上的信號必須要在兩個 OFDM 符元之間加上一特定長度的護衛區間,此護衛區間的內 容是由時域上 OFDM 符元的尾端複製而得,複製的目的是為了讓各個頻率成分的訊號 保持連續,避免因為信號不連續而破壞信號的正交性,同時護衛區間的也可以避免因 為多路徑通道過長而發生兩個 OFDM 符元間相互干擾,也就是碼際干擾效應(ISI)。第三章 基頻通道模型
在進行基頻系統的模擬時,必須要建立基頻通道模型,來模擬信號經過通道傳 送時會產生的各種效應,而如何去克服這些效應,將訊號正確的接收還原,則是接收 機設計的重點。本章中介紹我們所使用的基頻通道模型,包括多路徑通道、載波頻率 偏移、取樣頻率偏移、加成性白高斯雜訊(AWGN)等。基頻通道模型之方塊圖如下: 圖 3.1:基頻通道模型方塊圖3.1 多路徑通道
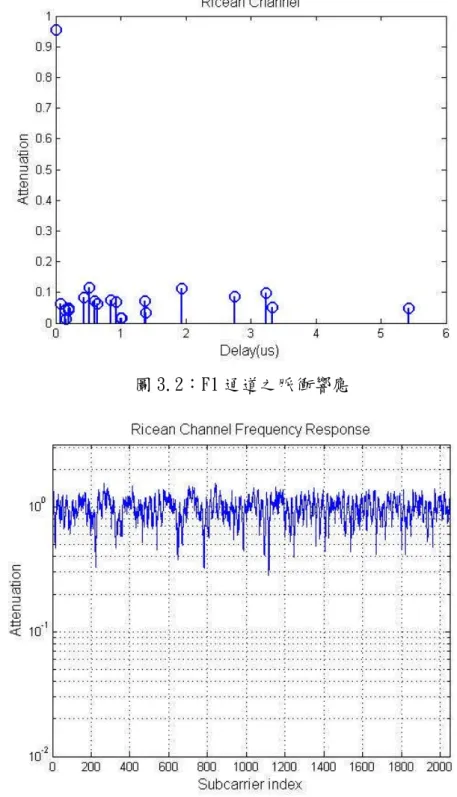
在 DVB-T 規格中定義了兩個多路徑通道[5],分別為 F1(Fixed)與 P1(Portable) 通道,這兩個通道模型皆為靜態通道,意指發射端跟接收端之間沒有相對速度,而訊 號的傳撥路徑的時間延遲、相位移、信號衰減皆為非時變,在本文中我們採用此二通 道模型以及 AWGN 通道進行模擬。 ˙ F1 通道F1 通道與 P1 通道最大不同之處在於 F1 通道有一條直視(Line of Sight, LOS)
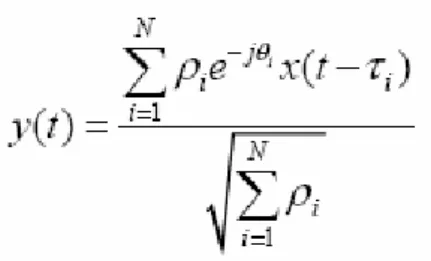
路徑,F1 通道的輸入與輸出訊號的關係式如下:
其中 x(t)為輸入訊號,y(t)為輸出訊號,ρi 為第 i 條路徑的衰減係數,τi 為第 i 條路徑的時間延遲,θi 為第 i 條路徑的相位移,N 為最總路徑數。對於 LOS 路徑的衰減係數 ρ0 定義了 Ricean factor K: (3.2) 其他 20 條路徑的 ρi、τi、θi 如下表所示: 表 3.1:F1,P1 通道之功率、相位、延遲參數 i ρi τi θi 1 0,057 662 1,003 019 4,855 121 2 0,176 809 5,422 091 3,419 109 3 0,407 163 0,518 650 5,864 470 4 0,303 585 2,751 772 2,215 894 5 0,258 782 0,602 895 3,758 058 6 0,061 831 1,016 585 5,430 202 7 0,150 340 0,143 556 3,952 093 8 0,051 534 0,153 832 1,093 586 9 0,185 074 3,324 866 5,775 198 10 0,400 967 1,935 570 0,154 459 11 0,295 723 0,429 948 5,928 383 12 0,350 825 3,228 872 3,053 023 13 0,262 909 0,848 831 0,628 578 14 0,225 894 0,073 883 2,128 544 15 0,170 996 0,203 952 1,099 463 16 0,149 723 0,194 207 3,462 951 17 0,240 140 0,924 450 3,664 773 18 0,116 587 1,381 320 2,833 799 19 0,221 155 0,640 512 3,334 290 20 0,259 730 1,368 671 0,393 889 由以上的式子與參數,可以得到 F1 通道的脈衝響應(圖 3.2)與頻率響應(圖 3.3) 如下:
圖 3.2:F1 通道之脈衝響應
圖 3.3:F1 通道之頻率響應
˙ P1 通道
當傳送與接收端無直視通道時,通道模型可採用 P1 通道,其 20 條路徑的時間
(3.3)
由上式所得 P1 通道的脈衝響應(圖 3.4)與頻率響應(圖 3.5)如下:
圖 3.4:P1 通道之脈衝響應
觀察 F1 與 P1 的頻率響應可以發現,對於有直視通道的 F1 來說其餘非直視路徑 的影響相對低很多所以對於不同頻率的次載波在通道響應上的變化較小,而 P1 通道 在某些次載波上的衰減就相當嚴重,這會影響到系統之接收效能。
3.2 載波頻率偏移
載波頻率偏移的成因要從震盪器的誤差開始探討,在傳送機與接收機內都各有 一個震盪器以提供調變、解調、取樣等所需的頻率,而震盪器實際的震盪頻率與其原 本標示的頻率存在著一定範圍內的誤差,這個誤差可能是很微小的,但就造成了傳送 機與接收機兩邊的取樣頻率與載波頻率的不相符。以下將討論的載波頻率偏移所造成 的影響,同時也討論的取樣頻率偏移及其影響。 在理想狀態下接收端所收到的 OFDM 信號:( )
( )
( , )
( )
l l n n lr n
s t
h t
n n
(3.4) 其中 , 2 '( ( ) ) 1 2 , 01
( )
g s c tx j k t N l N T K j tf NT l k kt
e
a
e
N
ls
(3.5) 其中每個 OFDM 符元有 Ns=N+Ng個取樣點,護衛區間占 Ng個取樣點,取樣周期 為 T,k’為相對於中心頻率的次載波位置編號 k’=k-(K-1)/2,若傳送端與接收端頻率 差距△f (△f = fc,tx- fc,rx),則接收端所收到取樣後的訊號變為:( )
( )
( , )
( )
l l n n lr n
s t
h t
n n
2 '( ( ) ) 1 2 , 01
( , )
( )
g s j k t N l N T K j t f NT l k n l ke
a
e
h t
n n
N
(3.6) 經過快速傅立葉轉換到頻域上則為:1 2 ' / , 0
( )
N j k n N l k l nR
r n e
2 ' ( ) 2 ( )(1 ) / , , , , s g s g k j lN N j lN N N N l k l k l k l ke
e
H
a
ICI
N
(3.7) 其中 CFO(載波頻率偏移) ε=△fNT,SFO(取樣頻率偏移) ξ=(T’-T)/T,α 為衰減 係數,其大小趨近於 1,此處 ICIl,k為由載波頻率偏移造成的 ICI(inter-carrier interference),Hl,k,為對第 l 個 OFDM 符元中第 k 個次載波的頻率響應,由上式可推 導出第 l 個與第 l-1 個 OFDM 符元間的相位差: 1' ( )
lk
l( )
k
l( )
k
2
2
2
s s sN k
fN T
fN T
N
2
2
s sN k
fN T
N
(3.8) 其中 2π△fNsTξ 因為其值相當小故可以將其忽略,而 2π△fNsT 這項代表載波頻 率偏移所造成的相位差,2πNskξ / N 則是取樣頻率偏移所造成的相位差。3.3 取樣頻率偏移
由於傳送端與接收端的震盪器的頻率有誤差,導致 A/D、D/A 的取樣頻率也有微 小的差異,而在取樣時造成些許的時間偏移,但隨著取樣的樣本數增加,此偏移量會 越來越大,導致最後所有取樣點皆偏離原本應該取樣的位置,取樣頻率偏移效應的示 意圖如下:圖 3.6:取樣頻率偏移示意圖 上圖中圓形的取樣點為原本正確的取樣位置,倒三角則為因為取樣頻率偏移效 應取樣所得的結果,取樣頻率偏移為ξ=1/10,可以看出隨著時間增加,取樣點距離 正確的位置越來越遠,到了第十點時誤差就達到了一個取樣週期之多,可以得知隨著 時間累積,取樣頻率誤差會導致接收端的取樣點與原本正確的取樣位置有相當大的誤 差,而造成取樣錯誤,這是在時間軸上來觀察。 而在頻率軸上來看,由上一節推導的結果可得知因為取樣頻率偏移所造成在兩 個 OFDM 符元間的相位差為 2πNskξ / N,此值與 k 成正比,也就是與次載波索引值成正 比,下圖為取樣頻率偏移的一個例子,是以兩個相鄰符元間連續領航訊號的相位差所 得: 圖 3.7:取樣頻率偏移造成 OFDM 符元相位變化
由上圖可以看出,取樣頻率偏移對於 OFDM 符元造成的相位改變確實是與次載波
索引值成線性關係,而取樣頻率偏移的大小影響到斜率。
3.4 加成性白高斯雜訊
在 DVB-T 規格中所定義的訊雜比(signal to noise ratio)是以 C/N 來表示,也
就是 CNR[6],次載波上符元的平均能量對上雜訊能量的比值,假設在 2K mode 下 C/N 與雜訊功率大小關係推導如下:
/
AverageSymbolPower
C N
CNR
AverageNoisePower
(3.9) Average Symbol Power =2 2 2 1 2 4 2 2 0 4 (1512 1 176 ( ) 17 1 ) 1 3 | ( ) | 4.4 10 2048 N k FFT X k N
(3.10)Average Noise Power
2
2 (3.11)4 2
4.4 10
/
2
C N
CNR
(3.12) 其中 1512 為一個 OFDM 符元中資料符元個數,176 為連續領航訊號與散射領航訊 號的加總個數,17 為傳輸參數訊號個數,NFFT為 2048。第四章 接收機架構與演算法
4.1 接收機架構
接收機的架構可以分為兩個主要的部份:內部接收機(Inner receiver)、外部
接收機(Outer receiver)。內部接收機主要是用來處理信號從傳送端到接收端傳遞過
程中所遭遇的一些非理想效應及同步相關的問題,例如符元時間偵測(Symbol timing
detection)、載波頻率偏移(Carrier frequency offset) 、取樣頻率偏移(Sampling
frequency offset)、多路徑通道(Multi-path channel)等。內部接收機排除了這些
效應後,再將訊號送入外部接收機,進行反交錯(De-interleaving)、解通道編碼 (Channel decoding)等動作,設法將錯誤的信號還原以提升傳輸的正確率。 內部接收機包括下列模組: 傳輸模式與護衛區間偵測 符元時間偵測 分數載波頻率偏移估測 整數載波頻率偏移估測 載波頻率偏移之追蹤 取樣頻率偏移之追蹤 通道估測 傳輸參數訊號解碼 外部接收機包括下列模組: 解映射器 內部反交錯器 內部解碼器 外部反交錯器 外部解碼器
整個接收機架構的方塊圖如下所示: 圖 4.1:DVB-T 基頻接收機系統方塊圖
4.2 傳輸模式與護衛區間偵測
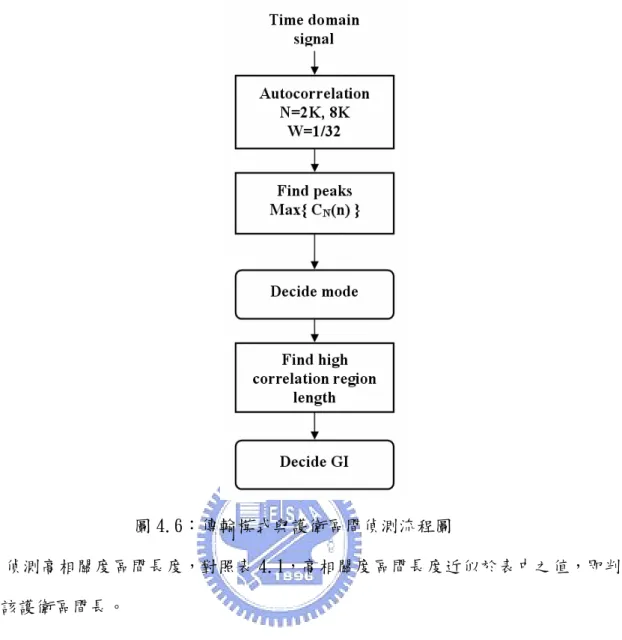
接收到的信號經過 A/D 取樣後進入內部接收器,第一個要執行的就是傳輸模式 與護衛區間長度的偵測,偵測到的傳輸模式後才能決定所用的快速傅立葉轉換之點 數,以及其他與傳輸模式有關的參數,如次載波個數、載有資料之次載波個數、連續 領航訊號位置、傳輸參數信號位置等。偵測到之護衛區間長度則會在接下來的符元時 間偵測、分數載波頻率偏移估測演算法中使用到。 傳輸模式與護衛區間偵測的原理,是利用護衛區間為其 OFDM 符元的尾端重複的 特性。其動作是將時域信號延遲 N 個樣本數與原本的信號,以 W 為 test window 長度 做 autocorrelation,之後再做一些判斷,詳細之做法如下圖所示,其中 N 為該次測 試的傳輸模式之快速傅立葉轉換點數(FFT size),test window 的移動範圍為最小為N + Wmax,Wmax為最大之 test window,其長度為1
圖 4.2:傳輸模式與護衛區間偵測示意圖 令 C(n)為正規化之 autocorrelation,則 1 * 0 1 * 0
|
(
)
(
) |
( )
|
(
)
(
) |
W i W ir n i r n i
N
C n
r n i r n i
(4.1) 傳統上在做傳輸模式與護衛區間偵測需要做八次測試才能判斷信號是屬於何種 傳輸模式與護衛區間長度,也就是以兩種傳輸模式:2K mode、8K mode(N=2048、8192), 以及護衛區間長度:1/4、1/8、1/16、1/32 ( W=1 4N、 1 8N、 1 16N、 1 32N),產 生的八種組合計算出八組 autocorrelation 值,從這些值中找出(在合理的週期下) 可出現最大的峰值的組合,即可判斷為其傳輸模式與護衛區間長度。 圖 4.3:傳統的傳輸模式與護衛區間偵測結果(2K mode, 1/8 GI) 上圖為用兩種傳輸模式與四種護衛區間長度所得到的八種不同的 N 與 W 之組合所產生出的 autocorrelation 值的一個例子,實際上訊號所使用的是 2K mode 與 1/8 的護衛區間長度,在左下角的圖中可以發現到在兩千點後有一明顯的峰值,故判斷其 傳輸模式為 2K mode,護衛區間為 1/8。 使用以上傳統的傳輸模式與護衛區間偵測演算法需要做八次的測試,運算量也 相當大,所以我們提出另一種兩段式的傳輸模式與護衛區間偵測演算法,只需要做五 次測試,即可判斷傳輸模式與護衛區間長度。此演算法分為兩階段,第一階段為傳輸 模式偵測,第二階段為護衛區間長度偵測,第一階段共要做兩次偵測以判斷傳輸模 式,第二階段要做四次偵測以判斷護衛區間長度,但是第二階段中有一次偵測與第一 階段條件相同,故只需要五次偵測即可完成整個演算法。 第一階段為傳輸模式偵測,我們先固定 W 為 1 32N,N=2048、8192 做兩次 autocorrelation 測試,得到的 autocorrelation 取其最大值做比較,較大者即判定 為該種傳輸模式。 下例是以下二圖分別為 2K mode 與 8K mode 之傳輸訊號做模式偵測所產生的 autocorrelation 圖形: 2K mode,GI = 1/32 圖 4.4:傳輸模式偵測結果(2K mode) 8K mode,GI = 1/8 圖 4.5:傳輸模式偵測結果(8K mode)
在圖 4.4 中,可以明顯看出左圖中當 N=2048 時,在起始點與大於 2000 的位置 各有一明顯而且較大的峰值,在右圖 N=8192 時則無此現象,而是呈現雜亂且值較低, 故可判斷此訊號的傳輸模式為 2K mode。圖 4.5 中當 N=2048 時也是呈現無明顯峰值 與周期的現象,N=8192 時在起始處附近有一長串的高相關度區域,可得知此信號是 以 8K mode 傳送。探討以上兩圖的 autocorrelation 圖形,在圖 4.4 中只有呈現峰值, 並且是以N+W 為週期出現,即代表此訊號的傳輸模式為 2K mode 之外,其護衛區間長 度亦等於測試長度之 W 值,即可知護衛區間長度為 1/32;圖 4.5 中在右圖中出現一 段的高相關度區域,代表此訊號的護衛區間長度大於測試長度 W,可得知此訊號的護 衛區間大於 1/32,假設我們得知此訊號護衛區間長度為 1/8,則可推算出右圖之高相 關度區域寬度為: 1 1 8192 ( ) 768 8 32 N GI W 利用偵測高相關度區域的寬度來做護衛區間長度偵測,高相關度區域寬度與對 應之護衛區間長度關係如下表: 表 4.1:高相關度區間長度與傳輸模式、護衛區間對照表 1/4 1/8 1/16 1/32 2K mode 448 192 64 1 8K mode 1792 768 256 1
圖 4.6:傳輸模式與護衛區間偵測流程圖
偵測高相關度區間長度,對照表 4.1,高相關度區間長度近似於表中之值,即判
斷為該護衛區間長。
4.3 符元時間偵測(Symbol timing detection)
符元時間偵測在 OFDM 系統中非常重要,因為 OFDM 信號是以 OFDM 符元為單位傳
送,所以在時域信號上,對於同一個次載波頻率成份的信號在兩個符元之間可能相位
與大小都不相同,符元時間也就是一個 OFDM 符元的起始點,此起始點若決定錯誤,
使得在擷取時域信號時跨越了前後兩個 OFDM 符元,會導致 ISI(Inter Symbol
Interference)效應,前後兩個 OFDM 符元相互干擾造成錯誤率大增與系統效能下降。
護衛區間存在的目的之一就是要避免因為符元時間錯誤造成 ISI,所以護衛區間這段
換後會被視為一相位變化,此相位變化會在通道估測時被修正。 圖 4.7:符元時間位置與時域信號結構 符元時間偵測的演算法與傳輸模式/護衛區間長度偵測類似,差別在於以得知了 傳輸模式與護衛區間長度,所以我們將 N(傳輸模式)與 W(護衛區間長度)固定,將 test window 移動 N+W 的距離取 autocorrelation 值,取其峰值的位置即為符元起始位置。 1 * 0 1 * 0
|
(
)
(
) |
arg max
|
(
)
(
) |
W i est n W ir n i r n i
N
C
r n i r n i
(4.2) 圖 4.8:符元時間偵測示意圖 由上圖可以發現,當 test window 移動到護衛區間與其複製的來源區域重疊的 位置時,由於做 autocorrelation 的兩段信號是相同的,若無其它非理想效應的干擾,可得到 Cest=1 之峰值,若是在有雜訊以及其其它非理想效應干擾下,此兩段相同
的訊號仍會有明顯的相關性,下圖為模擬符元時間偵測的結果。值得注意的是,此符
元時間偵測無須額外的運算,其作法與護衛區間偵測演算法相同,在護衛區間偵測到
的同時符元時間也偵測到。
圖 4.9:符元時間偵測結果
4.4 分數載波頻率偏移估測(Fractional carrier frequency
offset estimation)
載波頻率偏移對時域信號的取樣點所造成的相位偏移可以以下式表示:( )
2
2
(
) /
ln
ft
nlN
sN
gn
N
(4.3) 其中Ns=N+Ng,ε=△fNT,又 1/NT 為次載波頻寬,將載波頻率偏移改寫成以下型 式 i ff
f
f
(4.4) 其中 fi為載波頻率偏移中屬於次載波頻寬整數倍的部分,ff為剩餘部份,亦稱 為載波頻率偏移的分數部分。做載波頻率偏移估測分為三階段:分數載波頻率偏移同 步、整數載波頻率偏移同步、載波頻率偏移追蹤。 由上式可發現相位偏移與時間成正比,則我們可以比較不同時間點的相位變 化,即可偵測出載波頻率偏移,但整數部分的載波頻率偏移對相位差造成的影響為 2π 的整數倍,故在此我們只能偵測出載波頻率偏移的分數部分ff。利用護衛區間與 其複製來源相同的特性,計算這兩段區間的相位差即可估計出f。圖 4.10:分數載波頻率偏移估測原理 1 1 1
Im
( )
(
)
1
ˆ
tan (
)
2
Re
( )
(
)
s s g s s g N l l n N N f N l l n N Nr n r n
N
f
NT
r n r n
N
(4.5)4.5 整數載波頻率偏移估測(Integral carrier frequency
offset estimation)
整數載波頻率偏移估測演算法的原理是利用信號轉換至頻域後,偵測連續領航 信號實際上存在的次載波與原本連續領航訊號的位置差距,以連續領航信號的次載波 偏移,即可得到整數載波頻率偏移。 時域信號在經過符元時間同步與分數載波頻率同步後,去除護衛區間再經過快 速傅立葉轉換變為頻域的 OFDM 符元。在接收端已知的是連續領航訊號的次載波位 置,將第一個與第二個接收到的 OFDM 符元取其連續領航訊號位置加 k’計算其相關 性之絕對值,得到最高相關性的 k’值即為整數載波頻率偏移量,演算法示意圖如下: 圖 4.11:整數載波頻率偏移估測示意圖找出連續領航信號的偏移量後,便可推算出整數載波頻率偏移的大小,如下式:
'
ˆ
ik
f
NT
when * 1 2 'max |
(
')
(
') |
k k PilotR k
k
R
k
k
(4.6) k: continual pilot 對 k’=-10 ~ +10 的次載波偏移量做相關度模擬測試後的結果如下圖所示,可見無論是在 Rayleigh channel 或是 AWGN channel 下做偵測,發現 k’= +2 時可以得
到明顯較大的相關值,由此可以判斷此信號的整數載波頻率偏移量為正二倍的次載波
頻寬。
圖 4.12:整數載波頻率偏移估測結果
4.6 載波頻率偏移之追蹤(Carrier frequency offset
tracking)
在無雜訊與通道之非理想效應下,總共的載波頻率偏移應該等於分數載波頻率 偏移估測與整數載波頻率估測之和:ˆ
ˆ
f if
f
f
(4.7)產生誤差,主要是分數載波頻率偏移估測不正確所造成的誤差,此誤差稱為剩餘載波 頻率偏移(residual CFO) fˆr,定義如下:
ˆ
ˆ
f i rf
f
f
f
(4.8) 由 3.2 節 之 推 導 如 下 式 可 得 知 , 由 載 波 頻 率 偏 移 所 造 成 的 相 位 變 化 為 2π△fNsT,故在相同的載波頻率偏移下對於同一個 OFDM 符元內的所有次載波所造成 的相位偏移是相同的 12
' ( )
( )
( )
2
s l l l sN k
k
k
k
fN T
N
(4.9) 所以當我們補償了分數與整數載波頻率偏移後,接著只要估測出同一個 OFDM 符 元內所有次載波上相位變化相同的成分,即可估測出剩餘載波頻率偏移。然而剩餘載 波頻率偏移為一固定值 fr f fˆf fˆi,而受到雜訊等效應影響,對於剩餘載波頻率 偏移估測也會產生誤差,所以我們必須以不斷追蹤(tracking)的方式來求得 fˆr之值。 ,1
ˆ
(
'( ))
2
r l l k sf
avg
k
N T
(4.10) , ˆ r l f 為第 l 個 OFDM 符元所估測出的剩餘載波頻率偏移,我們可以將它輸入 loopfilter 如下(圖 4.12),其中 α→0,其輸出為 fˆr loop, ,如此,fr,loop將會逐漸收斂而接
近fr。 圖 4.13:用於剩餘載波頻率偏移追蹤的 loop filter 其方程式為: 1 , ,
ˆ
(1
)
ˆ
ˆ
r loop r loop rf
f
z
f
(4.11) 1 z 1 ˆ r f , ˆ r loop f剩餘載波頻率偏移追蹤的方塊圖如下:
圖 4.14:剩餘載波頻率偏移追蹤方塊圖
4.7 取樣頻率偏移之追蹤(Sampling frequency offset
tracking)
由(前式)可知,取樣頻率偏移造成的 OFDM 符元間相位差與次載波索引值成一線 性關係,故我們需要求出此斜率值,便可得到取樣頻率偏移的估測值,演算法如下: 2, 1,1
1
ˆ
(
)
2 (1
/
)
/ 2
l l l gN
N
M
(4.12) * 2|1, , 1, (1|2)arg[
]
l l k l k k Cz
z
(4.13) 其中 為第 l 個 OFDM 符元中前半或後半連續領航信號的平均相位偏移,M 為2|1,l 次載波個數(不包含護衛頻段)。由於雜訊與通道之非理想效應,估測出的取樣頻率偏 移並非完全準確,故也需要用追蹤的方式來逐漸逼近實際的載波頻率偏移值。 圖 4.15:用於取樣頻率偏移追蹤的 loop filter 其方程式為:Residual CFO Tracking
FFT Residual CFO Estimation Loop Filter Phase Compensation 1 z 1 ˆ r , ˆ r loop
圖 4.16:取樣頻率偏移追蹤方塊圖 在頻域上補償取樣頻率偏移所造成的相位差如下: ,
ˆ
( )
2
(1
)
lk
lk
GI
r loop
(4.15) 其中l 為符元個數,k 為次載波索引,GI 為護衛區間。 在補償過因取樣頻率偏移所造成的次載波相位差後,因取樣頻率偏移所造成些 微的符元時間偏移並沒有得到校正,若不校正則在經過一段時間之後符元時間就會偏 移到超出護衛區間之外,導致符元間干擾效應(ISI),大幅降低系統效能,故我們使 用相位補償的方式來做取樣頻率同步時,必須要一段時間內做一次符元時間同步的動 作,以確保符元時間落在護衛區間之內。4.8 傳輸參數訊號解調變(TPS demodulation)
完成了通道估測與補償後,在訊號進入外部接收機之前必須先解出 DVB 的傳輸 參數訊號,以得除了傳輸模式與護衛區間長度以外的其他傳輸參數,如星狀圖型式、 編碼率等…,得知這些參數後才能進行之後的解映射與解通道編碼等動作。 解 TPS 的方式分為三個步驟:1、DBPSK 解調,2、決定 TPS 位元,3、BCH 解碼。 ˙ DBPSK 解調:收到一個 OFDM 訊框後,將 TPS 次載波先擷取出來,依照次載波索 引值所對應的w 做 DBPSK 解調。k ˙ 決定 TPS 位元:解開 DBPSK 後得到帶有雜訊的的 TPS 符元,此處我們用一簡單的 方式做決定 TPS 位元的動作:SFO Tracking
Residual CFO Estimation SFOEstimation LoopFilter
Phase Compensation
取出 TPS 符元的實數部分 將每一個 TPS 次載波上同一個 TPS 位元相加取平均 以平均後的正負號決定此位元為 0 或 1 ˙ BCH 解碼:以 BCH(67,53,t=2)解碼器將以上的位元做錯誤更正,可以修復兩個位 元以內錯誤,增加了 TPS 的正確性。 TPS 解調變的方塊圖如下: 圖 4.17:TPS 解調變方塊圖
4.9 外部接收機(Outer receiver)
經由內部接收機訊號除去通道的非理想效應後,成為帶有雜訊的資料符元進入 外部接收機;而外部接收機的功用為解映射、反交錯、解通道編碼等。 ˙ 解映射器 此處解映射器使用的是軟性解映射器,將資料符元與通道響應之影響轉換為位 元之 LLR(log-likelihood ratio),輸出的 LLR 值即代表此位元為 0 或 1 之可能性, LLR 之計算方式如下[4]: , , 1 ,[ ]
1
,
|
|
1
I I k I k I ky i
k
D
D
d
k
(4.16) 2 , ,(
I k) |
ch( ) |
I k,
1
LLR b
G
i
D
k
(4.17)TPS Demodulation
PRBS(Wk) DBPSK Demodulation BCH Decode TPS bit Decision TPS symbols TPS bits, , 1 ,
[ ]
1
,
|
|
1
Q Q k Q k Q ky i
k
D
D
d
k
(4.18) 2 , ,(
Q k) |
ch( ) |
Q k,
1
LLR b
G
i
D
k
(4.19) 其中y i y iI[ ], Q[ ]表示收到資料符元的實部與虛部大小,dI k, ,dQ k, 表示此資料符元 與位元邊界的最小距離,LLR b( I k, ),LLR b( Q k, )表示位元的 LLR 值,I 表示為實數軸上 的第 k 個位元,Q 表示為虛數軸上的第 k 個位元。 ˙ 內部反交錯器 這裡將解映射器所解出的軟性位元,送入內部反交錯器,反交錯的順序即與內 部交錯器的順序相反,符元反交錯器→位元反交錯器→多工器,輸出即為解開內部交 錯的位元順序的軟性位元序列。 ˙ 內部解碼器 為了解開 Puncturing 過的迴旋乘積碼,以及 LLR 的軟性位元,這裡使用維特比軟性解碼器(Viterbi soft decoder),LLR 序列在原本被 Punctur 掉的位置上補上 0,
輸入維特比軟性解碼器即得到解開迴旋乘積碼的位元序列。 ˙ 外部反交錯器 外部反交錯器也就是迴旋位元組反交錯器,將內不解碼器輸出的位元轉換成位 元組的形式,輸入外部反交錯器。外部反交錯器的結構與外部交錯器相反,同一條交 錯器與反交錯器上的通道,其暫存器之總合相同,也就是外部反交錯器使每一個位元 組最終延遲的時間相同,位元組的順序便回到做外部交錯前的狀態。外部反交錯器的 結構如下圖所示:
圖 4.18:外部反交錯器 ˙ 外部解碼器 外部解碼器即是做里得所羅門解碼的動作,先將外部反交錯器的位元組以 204 個位元組組成一個里得所羅門編碼封包,在此封包前加上 51 個 0,以 RS(255,239,t = 8)之里德所羅門解碼器將此封包解碼後將 51 個 0 去掉,即得到解碼過後的 MPEG-2 封包,其中一個封包內若有小於等於八個位元組的錯誤發生皆可被外部解碼器跟更 正。
第五章 頻域與時域聯合通道估測
DVB-T 系統使用 OFDM 調變技術的優點之一,就是在遇到各種不同的多路徑通道 時,能在頻率軸上將信號等化,輕易的將通道效應加以補償,排除多路徑通道對信號 的衰減與干擾。但要能完整去除通到效應的前提是必須對通道做出正確的估測,使用 規格中定義的一些已知的參考信號估測通道,通道估測的方式很多種,在本章中我列 舉三種適用於 DVB-T 系統的通道估測演算法,並在下一章中比較它們的效能好壞。 通道估測的原理是利用接收到信號 Yl(k)與已知的信號 Xl(k)估測出通道響應 ˆ ( ) H k ,在接收端所收到的時域訊號為y n( )h n( )x n( )n n( ),轉到頻域上則變為:( )
( )
( )
( )
l lY k
H k X k
N k
(5.1)ˆ ( )
l( ) /
l( )
H k
Y k
X k
(5.2)頻域等化器(FEQ, Frequency domain equalizer)的目的就是要將接收到的頻域
信號除去通道的頻率響應,即可還原得到信號進入通道前的值。
5.1 一維線性內插法
在 DVB 系統中做通道估測主要是使用 OFDM 符元中的散射領航訊號在頻域上對通 道做估測,在一個 OFDM 符元中,每隔十二個次載波會存在一個散射領航訊號,如下 圖所示: 圖 5.1:一維線性內插法所使用的領航訊號 由於領航訊號的大小與相位已知為 4 3 或 4 3 ,根據接收到的散射領航訊號值, 即可推算出此次載波上的通道頻率響應。( )
( )
ˆ ( )
( )
4 / 3
lR k
Y k
H k
X k
k
Scattered Pilot (5.3) 得到由散射領航訊號所估出的通道頻率響應後,使用線性內插法推算出其他次 載波的頻率響應,使用一維線性內插法做通道估測的示意圖如下: 圖 5.2:一維線性內插法示意圖 使用一維線性內插法的好處是簡單快速與節省記憶體,收到一個 OFDM 符元就用 本身的散射領航訊號做通道估測,也是較為直覺的一種做法;缺點則是用來估測的散 射領航訊號只佔所有次載波的 1/12,估測的樣本數過少,做完線性內插所得到的通 道頻率響應解析度較低,對於在頻率軸上變化較劇烈的通道,無法得到準確的頻率響 應估測。5.2 二維線性內插法
在 DVB 的 OFDM 符元中,散射領航訊號分為四種模式,間隔都為每隔十二個次載 波存在一個散射領航訊號,如下圖所示,橫軸為次載波索引,可以視為頻率軸,縱軸 為 OFDM 符元編號,可視為時間軸。 圖 5.3:二維線性內插法所使用的領航訊號元之同一個次載波上散射領航訊號所求得的通道頻率響應做線性內插,做為此一次載 波上兩個散射領航訊號間的頻率響應值,如下圖所示: 圖 5.4:時間軸上之領航訊號內插方式 再來是將時間軸內插所到的頻率響應值與散射領航訊號所求得的頻率響應值在 頻率軸上做線性內插 圖 5.5:間軸上之領航訊號內插後的 OFDM 符元 經過二維內插後即可得到較一維內插解析度較高也較精確的通道頻率響應,使 用二維線性內插法做通道估測的示意圖如下: 圖 5.6:二維線性內插法示意圖 由於二維線性內插法有在時間軸上做內插,所以對於時變通道也能有效估測, 而在頻率軸上除了散射領航訊號以外,還有時間軸上內插所得的次載波通道響應估測 值,將這些值在頻率軸上做內插可得到解析度較高的通道頻率響應,對於頻率響應變 化較劇烈的通道,也能較一維線性內插法做更準確的估測;然而使用二維線性內插法
的缺點是需要較多的記憶體已暫時儲存不同時間的散射領航訊號所估出的次載波頻 率響應值,而且欲對第 n 個 OFDM 符元做通道估測與頻域等化,須等到接收到第 n+3 個 OFDM 符元才能完成二維線性內插並將頻率響應補償回去,故同一時間內需要暫存 的資料有 n,n+1,n+2 等三組 OFDM 符元與 n-1,n-2,n-3 等三組散射領航訊號,以 8K mode 為例,總共需要儲存的符元數有
6817×3+(6816/12+1) ×3 = 22158 data symbols
可見得使用二維線性內插法需要一定大小的記憶體,若是記憶體充足的情況 下,使用此方法是不錯的選擇。5.3 頻域與時域聯合通道估測
傳統的頻域通道估測法有其限制,當遇到頻率響應變化較劇烈情況,估測的效 能就會大幅下降,為了改善通道估測的效能,我們應用了一種頻域與時域聯合通道估 測法[8],以補頻域估測之不足。 頻域與時域聯合通道估測可分為以下三個階段: ˙ 頻域通道估測 ˙ 時域通道響應位置搜尋 ˙ 最小平方法時域通道估測 第一階段的做法如前所述,以下則敘述第二及第三階段的做法。5.3.1 時域通道響應位置搜尋
將頻域通道估測所得到的通道頻率響應經由快速傅立葉反轉換成為通道脈衝響 應,在此通道脈衝響應中搜尋數個峰值位置視為通道脈衝響應的 Taps,如下圖:圖 5.7:Tap search 示意圖 使用差分法來做 Tap 的搜尋,假設估測出的通道脈衝響應為h nˆ[ ]判斷是否為 Tap 的條件為: 1
[ ]
[ ]
[
1]
d n
h n
h n
,d n
2[ ]
h n
[ ]
h n
[
1]
1[ ]
d n
ord n
2[ ]
threshold
(5.4) 當d n1[ ]或d n2[ ]大於某值時,即判斷在 n=k 時有一個 Tap 存在,當得知 Tap 位置時,即可以最小平方演算法(least-squares algorithm; LS)求出此 Tap 的值。
5.3.2 最小平方法時域通道估測
傳送端信號在經過通道後在接收端收到信號的過程可以表示為以下式子: p pY
X Gh
(5.5) 其中Yp為接收到的散射領航信號,Xp為傳送端的散射領航信號,G 為 FFT 矩陣, 0*0 0*1 0*( 1) 2 2 2 0 1*0 2 1 ( 1)*0 ( 1)*( 1) 1 2 2 (0) (0) 0 0 0 (1) 0 (1) 0 0 0 0 0 ( 1) 0 0 0 ( 1) L j j j N N N j N N N L L j j N N e e e h Y X h Y X e h Y N X N e e h 為通道脈衝響應。則可用最小平方演算法求得 h 之值。
H H
-1 H H LS P P P Pˆ
h
G X
X G
G X
Y
(5.6) 當我們已知通道脈衝響應 Tap 的位置時,便可使用上述的 LS 演算法求出該 Tap 的值,使用前面所述之 tap 搜尋法法有一缺點,即相鄰的 taps 可能無法真得,且其 門檻值也較難決定,下節所述的方法可克服這些問題。5.3.3 遞廻式時域與頻域聯合通道估測
在此一樣使用前述之 tap 位置搜尋法,不過只求取其最大值的位置,接著利用 LS 演算法求出這些 Tap 之值後,將這些 Tap 所組成的脈衝響應做快速傅立葉轉換, 將原本頻域通道估測的頻率響應與之相減後再做快速傅立葉反轉換,再重複搜尋剩餘 Taps 的最大值位置、使用 LS 演算法等動作直到搜尋到的 Tap 小於特定值為止。其流 程圖如以下所示: 圖 5.8:時域與頻域聯合通道估測流程圖在反覆搜尋 channel tap 的過程中,多次的 FFT/IFFT 會造成運算複雜度增加,
以減少 FFT/IFFT 的動作,降低運算複雜度,增加演算法的執行速度。
由於在頻域上做通道響應相減前,有經過一個護衛區間濾波器(guard band
filter),轉換到時間軸上便成為一個 sinc 濾波器,但是 sinc 濾波器難以實現,故
我們使用一簡單之低通濾波器(low pass filter)取代之,由於偵測到的 tap 數不多,
所以與低通濾波器做迴旋乘積(convolution)時的運算複雜度不高,使得此改進後的
方法可以顯著的降低運算複雜度。