多次再入射之雙鏡式環形共振腔雷射的研究
83
0
0
全文
(2) 目錄 中文摘要. ?. 英文摘要. II. 目錄. III. 圖目錄. IV. 表目錄. VII. 第一章. 緒論. 1. 第二章. 多次再入射之雙鏡式環形共振腔 2.1 文獻回顧 2.2 多次再入射之雙鏡式環形共振腔的應用. 4 4 7. 第三章. 多次再入射之精確解析解 3.1 近軸近似法 3.2 多次再入射之精確解析解 3.3 近軸近似法與多次再入射之精確解析解的比較 3.4 比較 TEM01 與立體八字形的差異. 10 10 16 34 38. 第四章. 共振腔的設計與穩定性分析 4.1 共振腔的設計 4.2 雷射共振腔穩定性分析-空腔 4.3 雷射共振腔穩定性分析-加入增益介質. 40 40 44 52. 第五章. 結論. 58. 參考文獻 附錄 A. 60 證明. L Mp = 2- 2 cos 2 cos θ R 2N. 63. 證明 附錄 B. 附錄 C 附錄 D. l NM = 2 R sin (. Mp Mp d ) 1 − cos 2 ( ) cos 2 [sin −1 ( ) ] 2N 2N R. 4 16π 2 d 01 證明 LTEM 01 = R + R − λ2 共振腔的穩定性模擬(for Fortran) 2. 中英文對照表. 66. 67 69 73. 2.
(3) 圖目錄 第一章 圖 1.1. N=9 , M=7 的側視圖. 第二章 圖 2.1 單一晶體經由切割形成的環形共振腔 圖 2.2. 三面鏡子組成的環形共振腔. 圖 2.3. 四面鏡子組成的環形共振腔. 圖 2.4. 立體八字形環形共振腔. 圖 2.5. 立體八字形環形共振腔 (a) 俯視圖 (b)側視圖 (c)端視圖. 圖 2.6. multipass cell. 圖 2.7. N=9 , M=4 的側視圖. 圖 2.8 三鏡式的雷射陀螺儀架構. 第三章 圖 3.1. 週期性的透鏡系統. 圖 3.2. 相同光學元件的串聯. 圖 3.3. 光學共振腔. 圖 3.4. l =1 , v =2 的共焦點式共振腔. 圖 3.5. 平面八字環形共振腔的穩定度分析圖. 圖 3.6. 雙鏡式環形共振腔之立體圖. 圖 3.7. 側視圖. 圖 3.8. N=2 , M=1 的端視圖. 圖 3.9. 單向 N=2 , M=1 CCD pattern. 3.
(4) 圖 3.10. 端視圖. 圖 3.11. d/R 與 L/R 對於 M/N 從 0.1 到 0.9 的關係. 圖 3.12. N=3 , M=1 的 cavity detuning 量測. 圖 3.13. N=7 , M=3 的 cavity detuning 量測. 圖 3.14. N=2 , M=1 的 L-I curve. 圖 3.15. N=5 , M=2 的 L-I curve. 圖 3.16. 雙鏡式共振腔三種雷射路徑. 圖 3.17. 固定 N=7 近軸近似法與多次再入射之精確解析解的比較. 圖 3.18 固定 M=1 近軸近似法與多次再入射之精確解析解的比較 圖 3.19. TEM01 mode 與立體八字形腔長的比較圖. 圖 3.20. TEM01 mode 與立體八字形 對於不同曲率半徑的腔長差值的比較圖. 第四章 圖 4.1. 多次再入射之雙鏡式環形共振腔雷射之系統架構. 圖 4.2. N=3 , M=1 的空腔側視圖. 圖 4.3. 光學共振腔穩定條件區域圖. 圖 4.4. 固定輸出點數 N=5 其 d/R 與空腔穩定度的關係圖. 圖 4.5. 固定雷射光在腔內迴圈數 M=1 其 d/R 與空腔穩定度關係. 圖 4.6. 固定輸出點數 N=5 其 d/R 與空腔 spot size 的關係圖. 圖 4.7. 固定輸出點數 M=1 其 d/R 與空腔 spot size 的關係圖. 圖 4.8. N=3 , M=1 的雷射共振腔側視圖. 圖 4.9. 固定輸出點數 N=5 其 d/R 與 1-q 的關係圖. 圖 4.10 固定雷射光在腔內的迴圈數 M=1 其 d/R 與 1-q 的關係 圖 4.11 立體八字環形不同增益介質的厚度對穩定度的影響. 4.
(5) 附錄 A 圖 A1 共振腔中(a)立體圖 (b)側視圖 (c)端視圖 三個方向的光路徑. 5.
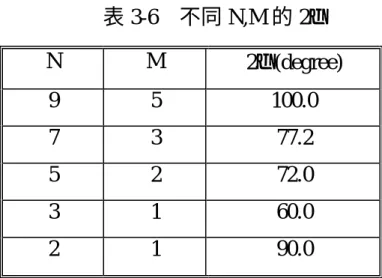
(6) 表目錄 第三章 表 3-1. N=9 , M=5 模擬與實驗的結果. 表 3-2. N=7 , M=3 模擬與實驗的結果. 表 3-3. N=5 , M=2 模擬與實驗的結果. 表 3-4. N=3 , M=1 模擬與實驗的結果. 表 3-5. N=2 , M=1 模擬與實驗的結果. 表 3-6. 不同 N,M 的 2φ. 表 3-7. 模擬腔長與實驗腔長的比較表. 表 3-8. 在 N≦10 的情況下,L/R 與(N,M)的對照表. 表 3-9. N=5 , M=1、2、3、4. 表 3-10. M=3 , N=4、5、7、8. 第四章 表 4-1. 增益介質的最小側移之模擬值與實驗值的對照表. 6.
(7) 中文摘要. 由於半導體幫浦的固態雷射同時具有半導體雷射體積小、輕巧的特 性和固態雷射高峰值功率以及高品質的輸出模態優點,近年來此種雷射 廣泛地應用於電子、通信和醫療各業。本研究的目的是研發出一兼具小 型與實用的環形共振腔雷射系統,目標是利用兩片球面鏡及一個增益介 質達到多次再入射的雷射系統,打破傳統環型共振腔需至少使用三片面 鏡的之設計。我們採用兩片球面鏡實現多次再入射雷射的技術,其成本 低廉、結構簡單、且光學元件少、光學元件校準容易,較傳統環型共振 腔更符合簡單化、輕巧的時代潮流。此環型共振腔可用於有效產生單縱 模的近紅外光及藍、綠光雷射,並可應用於航空、微量檢測、研製皮秒 (picosecond)量級的小型固態鎖模雷射。. 我們的研究從理論和實驗上來討論及驗證多次再入射雷射的可行 性,並由一些基本雷射原理,推導出腔長與輸出點數、腔內迴圈數及增 益介質中心與光軸的距離的關係式,並得到一個精確解析解,同時實驗 結果與理論模擬相當吻合。本論文並對多次再入射之精確解析解與近軸 近似做比較。針對不同的多次之再入射共振腔,分析光束路徑的端視 圖、側視圖及俯視圖,同時分析空腔與加入增益介質的雷射共振腔穩定 性,更以實驗加以驗證其準確性。本論文亦比較 TEM01 mode 及雙鏡式 立體八字形的共振腔設計,並分析此兩者的差異。. 7.
(8) Abstract. Diode laser pumped solid state laser is compact, and can generate high peak power laser with good output mode. It has been applied extensively in electronics, communication, and medical treatment in recent years. The purpose of this study is to develop a compact and practical ring laser system. The multi-reentrant ring laser system developed in this work composes of two spherical mirrors and a gain medium where the conventional ring laser systems have at least three mirrors to construct the laser cavity. The laser system is more compact and simple than conventional ring laser systems. It can be used for producing single frequency green and blue lasers. The laser system can also be applied in aviation, trace detection as well as compact picosecond mode-locked laser. We not only prove that the multi-reentrant laser system is feasible theoretically and experimentally, but also use the fundamental laser theory to find the relation among cavity length, number of points, number of circulation, and the distance between center of gain medium and optical axis. The exact solution we obtained is experimentally verified with good agreement. A comparison between exact solution and paraxial approximation is also performed. The beam paths observing from the top, side, and end view are analyzed for various multi-reentrant laser cavities. The stability of the cavity is numerically analyzed and experimentally verified with good agreement, too. Finally, the differences in cavity configuration between TEM01 mode and the figure-8 mode are compared in this thesis.. 8.
(9) 第一章 緒論 多次再入射之雙鏡式環形共振腔雷射,是一種體積小、元件少、無 散光像差的雷射共振腔,此環形共振腔可用於航空、微量檢測、鎖模雷 射及有效產生單縱模的近紅外光及藍、綠光雷射,其中單縱模的藍、綠 光雷射也可應用於生化與醫療科技、水下探測(underwater ranging)、資 料儲存、全像術(holography)等。. 近十幾年,世界各國無不投入大量的人力與財力於環形共振腔的研 究,但固態雷射晶體,傳統上吸收係數很低,且吸收頻寬窄,在閃光燈 幫浦(flash pump)下,增益介質的長度必須夠長以使幫浦效率得以提升, 對於需要高對稱性的環形共振腔而言,如此長度的增益介質在共振腔中 容易造成雷射光路徑的扭曲嚴重,因而破壞了雷射光路徑在共振腔中的 對稱性,所以不易利用雙鏡式做出立體環形共振腔。以半導體雷射幫浦 固態雷射,不僅解決了傳統閃光燈幫浦效率不高的問題,而且可以有效 的縮短增益介質的長度,使整個系統體積縮小,並可得到較高峰值的功 率,相較於半導體雷射而言,也使得輸出雷射之縱模及橫模的品質得以 提升,更讓利用雙鏡式做出環形共振腔的理想實現,本論文即對多次再 入射之雙鏡式環形共振腔做探討,希望能對環形共振腔的發展貢獻一點 心力。. 一般的環形共振腔至少需要三片面鏡[1-3],我們的環形共振腔是利 用兩片球面鏡及一個增益介質組成,並利用共振腔的再入射 (multi-reentrant)性質,成功的做出不同的雷射輸出點數 N,及腔內迴圈 數 M 的雷射系統,而多次再入射共振腔的意思是指,波長 1064nm 的雷 射光在共振腔中經過了一次的 round trip 之後,若在共振腔經過了 2N 次 9.
(10) 的反射,則第 2N+1 個輸出光點將與第一個輸出光點重合,其中 N 指的 是在輸出或輸入耦合鏡上的雷射光輸出點數。對於此多次再入射之雙鏡 式環形共振腔,為了瞭解雷射光在共振腔的路徑及一些光學特性,我們 使用一些基本的光學原理,推導出腔長與增益介質側移的關係式,得到 一個精確解析解,並以實驗加以驗證,發現實驗腔長與模擬腔長相當吻 合。. 對於此環形共振腔的再入射條件,A. Yariv 與 R. Kompfner 等人利 用近軸近似的方法[4],求得環形共振腔的再入射條件,其實是不符合實 際的環形共振腔,因為實際的環形共振腔是一種非正交(non-orthogonal) 且非近軸(non-paraxial)的共振腔,所以無法利用近軸近似的方法分析雷 射光在腔內的行為,而且利用近軸近似無法考慮到增益介質的側移對腔 長的影響。在我們推導出的精確解析解中,除了可以瞭解腔長與輸出點 數 N、腔內迴圈數 M 關係,並可知道增益介質的側移對腔長的影響。. 多次再入射之雙鏡式環形共振腔能應用於有效產生單縱模的近紅 外光及藍、綠光雷射,並因為雷射光在共振腔中的光路徑增加,有效腔 長增加,如圖 1.1,可用於產生皮秒(picosecond)量級的小型固態鎖模雷 射,大幅縮小共振腔的體積。. 圖 1.1. N=9 , M=7 的側視圖. 10.
(11) 陀螺儀一般來說可分為機械式陀螺儀、光纖陀螺儀及雷射陀螺儀, 舉凡航空控制系統、海上船艦、潛艇、油井探勘的定位等,都需要陀螺 儀的轉動感測功能。多次再入射之雙鏡式環形共振腔雷射系統也可以運 用在雷射陀螺儀(ring-laser gyroscope) 上[5],因為雷射光在共振腔中的 光路徑增加,有效腔長增加,所以對於需要測得微小的頻率差的陀螺儀 而言,將是一個重要的貢獻。. 在下面各章節中,將針對不同的問題加以探討,第二章的「多次再 入射之雙鏡式環形共振腔」 ,將以文獻回顧為出發,並針對多次再入射 之雙鏡式環形共振腔的應用加以討論;第三章的「多次再入射之精確解 析解」,將介紹近軸近似及多次再入射之精確解析解,並比較兩者的差 異;第四章的「共振腔的設計與穩定性分析」,將介紹多次再入射之雙 鏡式環形共振腔的設計,並針對空腔及加入增益介質的雷射共振腔穩定 性,做一個有系統的分析。. 11.
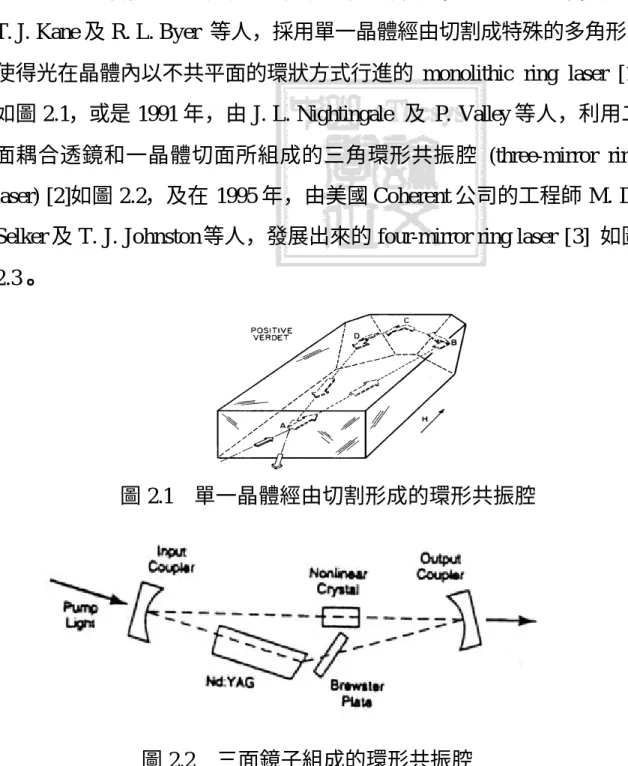
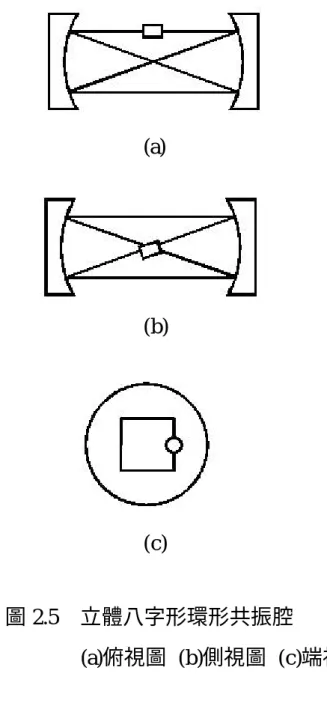
(12) 第二章 多次再入射之雙鏡式環形共振腔. 本章將以文獻回顧為出發,介紹一般環形共振腔的架構,並針對多 次再入射之雙鏡式環形共振腔的應用加以討論。. 文獻回顧. 2.1. 一般的環形共振腔是由三片或四片鏡片組成,例如 1985 年,由 T. J. Kane 及 R. L. Byer 等人,採用單一晶體經由切割成特殊的多角形, 使得光在晶體內以不共平面的環狀方式行進的 monolithic ring laser [1] 如圖 2.1,或是 1991 年,由 J. L. Nightingale 及 P. Valley 等人,利用二 面耦合透鏡和一晶體切面所組成的三角環形共振腔 (three-mirror ring laser) [2]如圖 2.2,及在 1995 年,由美國 Coherent 公司的工程師 M. D. Selker 及 T. J. Johnston 等人,發展出來的 four-mirror ring laser [3] 如圖 2.3。. 圖 2.1 單一晶體經由切割形成的環形共振腔. 圖 2.2. 三面鏡子組成的環形共振腔 12.
(13) 圖 2.3. 四面鏡子組成的環形共振腔. 光在傳統由三面或四面鏡片所組成的環形共振腔內是以共平面的 八字形或是三角形方式行進,相較一般線型共振腔,環形共振腔的光學 元件較多、體積較大、設計較複雜。直到立體八字形環形共振腔的發現, 打破了傳統雷射環形共振腔必須至少使用三片面鏡的設計。立體八字形 的共振腔是由二片面鏡及一個增益介質組成,如圖 2.4[6]。. 輸入耦合鏡. Nd:YAG. 輸出耦合鏡. 雷射輸出. 圖 2.4 立體八字形環形共振腔 13.
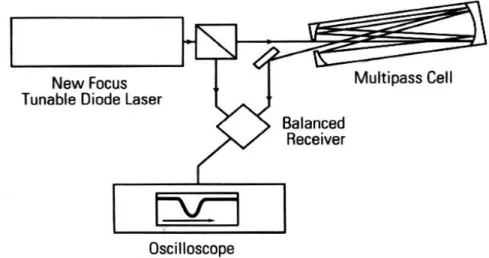
(14) 圖 2.5(a)及圖 2.5(b)是立體八字形環形共振腔的俯視圖及側視圖,由 圖可知,光的路徑是呈現八字形的結構,而由端視圖來看,光的路徑則 是一個方形的路徑結構。顯示腔內光的路徑是一立體而非平面的八字形 結構。. (a). (b). (c) 圖 2.5. 立體八字形環形共振腔 (a)俯視圖 (b)側視圖 (c)端視圖. 此雙鏡式八字形環形共振腔的設計較傳統的環形共振腔體積小、元 件少、設計簡單,對於此共振腔中是否存在其他的雷射路徑,是我們最 感興趣的,這也是我研究的重點,在第三章及第四章中將詳細介紹多次 再入射之雙鏡式環形共振腔雷射系統。 14.
(15) 2.2. 多次再入射之環形共振腔的應用. 我們採用兩片球面鏡實現多次再入射雷射的技術,不僅其成本低 廉、結構簡單、光學元件少、光學元件校準容易,較傳統環型共振腔更 符合簡化、輕巧的時代潮流。此環型共振腔可用於有效產生單縱模的近 紅外光及藍、綠光雷射,因為利用環形共振腔取代線型共振腔,可避免 線型共振腔因駐波所造成的空間燒孔(spatial hole burning) ,因而避免所 謂的綠光問題(green problem)。對於多次再入射之雙鏡式環形共振腔雷 射系統,可以作為微量檢測系統方面,目前商業上的微量檢測系統,大 部分是利用所謂的 multipass cell [7],如圖 2.6,其 multipass cell 的長度 大約從 36 公尺到 100 公尺,其原理是將一個可調波長的 LD 打入 multipass cell 中,雷射光在 multipass cell 中經由多次反射之後,將由 receiver 接收其輸出強度,並利用 I = I 0 e − αl 推算出氣體的α值,進而可知 微量氣體的含量。. 圖 2.6. multipass cell. 15.
(16) 多次再入射之雙鏡式環形共振腔雷射系統適合作為微量檢測系 統,因為以我們的實驗架構來說,我們的輸出及輸入鏡皆是以對 1064nm 反射率 99.8%的鍍膜,所以光在共振腔往返一次,約損失 0.4%的能量, 所以一旦有微量氣體進入共振腔中,則會造成共振腔中的損失增加,因 而會很靈敏的反應在輸出的功率中。. 另外利用此環型共振腔多次再入射的特性,可以嘗試製作皮秒量級 的小型固態鎖模雷射,傳統的鎖模雷射當工作在 100MHz 量級的重頻率 時,其腔長需要約 1 公尺,但利用此多次再入射環形共振腔如圖 2.7, 則只需約 10 公分即可,大幅縮小了鎖模雷射的體積,因而增加了實用 性。. 圖 2.7. N=9 , M=4 的側視圖. 民生或國防工業系統均常利用陀螺儀的轉動感測功能,舉凡空中的 直昇機及航空器、海上船艦、潛艇等,多次再入射之雙鏡式環形共振腔 雷射系統也可以運用在雷射陀螺儀(ring-laser gyroscope) 上[5],如圖 2.8,雷射陀螺儀是利用雷射在環形共振腔中,存在的順時針及逆時針振 盪的雷射光,當這光陀螺不動時,順時針及逆時針. 16.
(17) 的這兩束光具有相同的光程及頻率,若光陀螺發生旋轉,則二束光 的光程發生變化,將使此兩束光的頻率發生差異,而此頻率差將正比於 轉動的角速度。這就是所謂的桑亞克(Sagnac)原理[8]。. ∆v =. 4A Ω λL. (2.1). (2.1)式中,λ是雷射的波長,A 是環型的面積 L 是環的總腔長,Ω是雷射陀螺儀的轉速. 圖 2.8 三鏡式的雷射陀螺儀架構. 由式(2.1),我們可以發現,只要能測得這兩束光的頻率差,就可以 測出轉速,間接也能得知飛行器的轉速了。由此可知,對於如何能測得 此微小的頻率差,是雷射陀螺儀的技術關鍵,利用多次再入射之雙鏡式 環形共振腔雷射系統,因為雷射光在共振腔中的光路徑增加,有效腔長 增加,所以對於需要測得微小的頻率差的陀螺儀而言,將是一個重要的 貢獻。. 17.
(18) 第三章. 多次再入射之精確解析解. 對於多次再入射之雙鏡式環形共振腔雷射而言,要研究波長 1064nm 的雷射光在共振腔的光學路徑,可精確的由反射定律求解,亦 可以近軸近似法求得近似解。接下來將詳細介紹這兩種分析方法並比較 兩者的差異。. 3.1. 近軸近似法 (paraxial approximation). 波長 1064nm 的雷射光在多次再入射之雙鏡式環形共振腔內的光學 路徑,我們可使用近軸近似的方式來分析。近軸近似指的是光線在傳播 的過程中與光軸夾的角度非常小,此角度約等於其正弦值,即 sinθ≈θ, 一般約在 5°之內,此種光線我們稱為近軸光線(paraxial rays),探討此 種原理的光學我們稱它為近軸光學(paraxial optics),或是第一階光學 (first-order optics)。. 在探討多次再入射之雙鏡式環形共振腔內的光學路徑,除了使用近 軸 近 似 的 方 法 之 外 , 也 運 用 了 週 期 性 的 光 學 系 統 (periodic optical system),以下將詳細介紹何謂週期性的光學系統。. 週期性的光學系統(periodic optical system):. 週期性的光學系統是將多個光學元件串聯起來的一個裝置,以簡單 的例子來說,我們可將 n 個透鏡並以距離皆為 d 串接起來成為一個光學 系統,如圖 3.1,此光學系統可以運用 ABCD 矩陣來描述光線在這週期 性的光學系統中的光學路徑。 18.
(19) 圖 3.1. 週期性的透鏡系統. 為了瞭解圖 3.1 中,光線在週期性的透鏡系統中的光學路徑,我們 先來研究週期性的光學系統的基本原理,假設光線經過了 n 個相同的光 學元件,如圖 3.2,我們可用 ABCD 矩陣表示為下式:. A C. B D. r1 θ1. A C. B D. A C. B D. 圖 3.2 相同光學元件的串聯. rn +1 A B θ = C D n+1 . n. r0 θ 0. (3.1). 其中 r0 為起始位置 θ0 為起始位置的斜率 rn+1 為在第 n+1 個球面鏡上的位置 θ n+1 為在第 n+1 個球面鏡上的斜率 19. rn θn.
(20) 利用矩陣的運算,我們可以得到下式: rn +1 = Arn + Bθ n. (3.2). θ n+1 = Crn + Dθ n. 由上式我們可以發現如果知道初始值 r0,θ0,則我們將可得到 r1,θ1, r2,θ2 到 rn+1,θn+1。. 一般來說,為了方便使用電腦來計算 rn,θn,我們可將(3.2)式經過 一連串的運算之後,化簡為下式: rn = rmax sin (n φ + φ0 ) 其中 φ = cos−1 ( n = 1 , 2 ,.... n = 1 ,2 ,......... (3.3). A+ D ),而 rmax 和 φ0 為常數 2. 所以圖 3.1 中週期性的透鏡系統可利用下式來描述光線的路徑 rn = rmax sin (n φ + φ0 ) 其中 φ = cos−1 (1 −. n = 1 , 2 ,......... d ) 2f. 對於一般的光學共振腔而言,我們可以運用週期性的光學系統的觀 念來分析光線在共振腔的行為,考慮一個光學共振腔,如圖 3.3:. 圖 3.3. 光學共振腔 20.
(21) 由圖 3.3 我們可以很清楚的發現此共振腔是使用兩面曲率半徑皆為 R 的耦合鏡組成,兩面耦合鏡的中心距離相隔 L,所以運用週期性的光 學系統的原理,我們將可以發現光線在共振腔中一直重複性地經過距離 L 之後再被耦合鏡反射。所以 ABCD 矩陣即為下式:. A B ∴ C D. 1 0 1 L = − 2 1 0 1 R . n. 對於近軸近似及週期性的光學系統有一個基本的概念之後,對於多 次再入射之雙鏡式環形共振腔雷射系統,我們也可以運用週期性的光學 系統來分析雷射光在共振腔內的光學行為,但首先我們要先瞭解何謂多 次再入射共振腔(multi-reentrant cavity) [9],多次再入射共振腔的意思是 指,波長 1064nm 的雷射光在共振腔中經過了一次的 round trip 之後,若 在共振腔經過了 2N 次的反射,則第 2N+1 個輸出光點將與第一個輸出 光點重合,其中 N 指的是在輸出或輸入耦合鏡上的雷射光輸出點數。如 果將週期性的光學系統的觀念帶入多次再入射中,則多次再入射也就是 (3.3)式中的 r2N+1=r0。. 由 A.Yariv 的光電子學書中,我們可以知道多次再入射的條件[9]為 下式: 2 vφ yariv = 2 lπ 其中l , v為整數. 由文獻中我們也知道腔長與φ yariv 的關係如下[4]: 21. (3.4).
(22) L = 2 f (1 − cosφ yariv ). (3.5). 以 l =1 , v=2 為例,我們可由(3.4)及(3.5)式推算出 L=R , R=2f. 圖 3.4. l =1 , v=2 的共焦點式共振腔. 由圖 3.4 我們可以知道這是所謂共焦點式共振腔,而且由上圖可發 現,光線在共振腔中呈平面八字型的方式行進,但由文獻中,我們可以 知道,實際的此共焦點式的共振腔,光線在共振腔中是呈現三角形的路 徑[6],而且此共振腔的穩定度,在 x 方向及 y 方向上皆為不穩定如式 (3.6),其分析圖為圖 3.5[10]。. 22.
(23) A+ D = 2 . 1. , in x direction (3.6). 2 cos(2θ ) 2 − 3 − 1 4 cos θ 2. , in y direction. 其中 A,D 是一個 round-trip ABCD 的矩陣,θ≡sin-1(d/R),d 為在 耦合鏡上雷射的輸出光點與光軸的距離,R 是耦合鏡的曲率半徑,在 x 方向為 R/cosθ,而在 y 方向為 Rcosθ。. 4. 2. 穩定度. 3. y 2. x. y-direction. z. 1 x-direction. 0 0. 0.2. 0.4. 0.6. 0.8. d /R. 圖 3.5. 平面八字環形共振腔的穩定度分析圖. A. Yariv 及 R. Kompfner 等人對於多次再入射的條件及共振腔的腔 長,是使用近軸近似的觀念來分析的。但是對於實際立體的環形共振腔 而言,它是非近軸(non-paraxial)且非正交(non-orthogonal)的結構,所以 下一章我們將用精確的方法去探討立體環形共振腔的腔長及原理,並在 3.3 節中詳細分析這兩種方法在其他輸出點數上的異同。. 23.
(24) 3.2. 多次再入射之精確解析解. 對於多次再入射之雙鏡式環形共振腔雷射系統,為了更瞭解雷射光 在共振腔的路徑及一些光學特性,我們使用一些基本的光學原理,推導 出腔長與增益介質側移的關係式,關係中也包含了雷射光的輸出點數 N 與雷射光在腔內的迴圈數 M,所以接下來除了介紹推導腔長的基本觀念 之外,更有一連串有系統的分析,幫助我們更瞭解多次再入射之雙鏡式 環形共振腔雷射系統。 M2 M1. 1 3. 2. y z. 圖 3.6. x. 雙鏡式環形共振腔之立體圖. 雷射光在共振腔中仍遵守反射定律,反射定律就是光在不同介質的 交界面上,其入射角與反射角相等,且反射光線、入射光線與法線皆位 於同一平面。如圖 3.6,光由第一點經過第二點反射最後到第三點,皆 遵守反射定律。利用反射定律的兩個規則,經由一連串的數學運算,我 們可以推導出腔長的關係式如(3.7)式,以下做一個簡單的介紹,其詳細 的推導請參閱附錄 A。. d L = R {2 − 2 cos 2 φ cos[sin −1 ( )]} R 24. (3.7).
(25) 由圖 3.7可知 : l 第1 點座標 p1 : ( 0 , d ,− ) 2 l 第 2 點座標 p 2 : ( d sin 2φ , d cos 2φ , ) 2 l 第 3 點座標 p 3 : ( d sin 4φ , d cos 4φ ,− ) 2 L M 2 球心座標 m2 : (0,0 , -R ) 2. x M1. M2. 1 2 m1. m2. z 3 L. 圖 3.7 側視圖 反射定律: r r r r l 2, 1 • l 2, m = l 2, m • l2 , 3 (入射角=反射角 ) r r r r l 2, 1 × l 2, m = l 2 ,m × l 2, 3 (入射線、法線與反射線 在同一平面 ) 2. 2. 2. 2. d L = R{2 − 2 cos2 φ cos[sin −1 ( )]} R 其中 φ =. Mπ ,而 li , j為第i點到第 j點的向量 2N. 其中 R 為耦合鏡的曲率半徑,d 為在耦合鏡上雷射的輸出光點與光 軸的距離,2φ 為在 xy 平面上,光由第一點到第二點所轉的角度,N 為 雷射光在耦合鏡上的輸出點數,M 為雷射光在腔內的迴圈數,其物理意 義為完成一個 round trip 之後,雷射光再回到第一點時,在 xy 平面上總 共繞幾次 360 度。. 25.
(26) 為了驗證對於特定雷射光在耦合鏡上的輸出點數 N 與雷射光在腔 內的迴圈數 M 跟腔長的關係,我們實際去做實驗,實驗中增益介質的 側移距離 d0 設定在 3mm 左右,增益介質的側移距離 d0 定義為增益介質 的中心離光軸的垂直距離,也是光束距離光軸之最短距離,其中增益介 質的側移距離 d0 與耦合鏡上雷射輸出光點和光軸的距離 d 是呈現 cosφ 的關係,即 d0 =d cosφ ,其中φ =Mπ/2N,如圖 3.8,所以如果增益介質 的側移距離愈大,則雷射光點在耦合鏡上的輸出光點與光軸的距離也愈 大。. 圖 3.8. N=2 , M=1 的端視圖. 實驗的方向是以立體八字形的腔長出發,即雷射光在輸出點數 N=2,腔內的迴圈數 M=1 的腔長出發,前後調整腔長,腔長調整的範 圍從 L/R=0.5 到 L/R=1.2 左右,而實驗裝置中耦合鏡的曲率半徑 R 皆為 80mm , 從. L/R=0.5. 到. L/R=1.2. 的 範 圍 中 包 含 了. (N,M)=(3,1),(5,2),(7,3),(2,1),(9,5)這五種不同雷射輸出點數。. 為了方便比較這五種不同輸出點數的實驗結果,以下將有一系列的 圖表,列出特定輸出點數 N,及雷射光在腔內的迴圈數 M 的側視圖、俯 視圖、端視圖及實際的實驗結果,並列出模擬的腔長與實驗腔長,此模 擬腔長是針對增益介質的側移距離 d0 為 3mm 時的腔長,並將模擬的腔 長與實驗腔長做比較,討論模擬腔長的準確性。. 26.
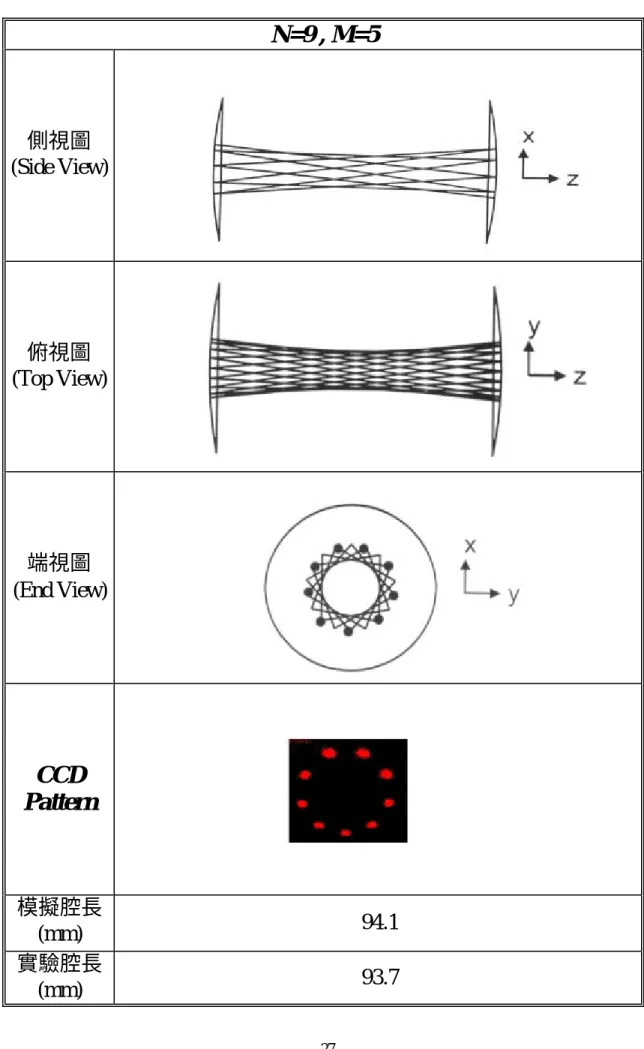
(27) 表 3-1. N=9 , M=5 模擬與實驗的結果. N=9 , M=5. 側視圖 (Side View). 俯視圖 (Top View). 端視圖 (End View). CCD Pattern. 模擬腔長 (mm) 實驗腔長 (mm). 94.1 93.7. 27.
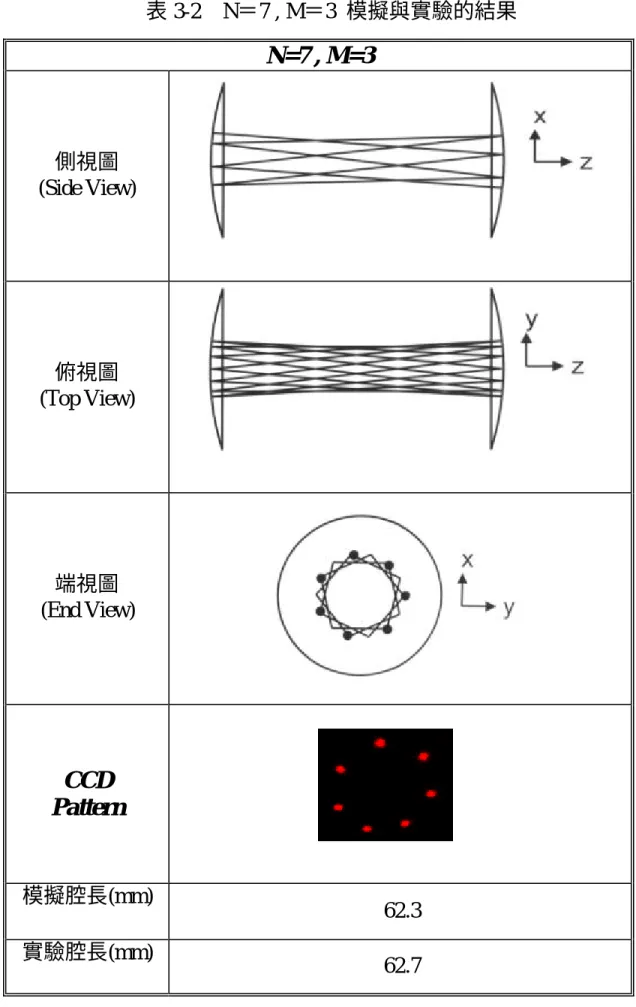
(28) 表 3-2. N=7 , M=3 模擬與實驗的結果. N=7 , M=3. 側視圖 (Side View). 俯視圖 (Top View). 端視圖 (End View). CCD Pattern. 模擬腔長(mm). 62.3. 實驗腔長(mm). 62.7. 28.
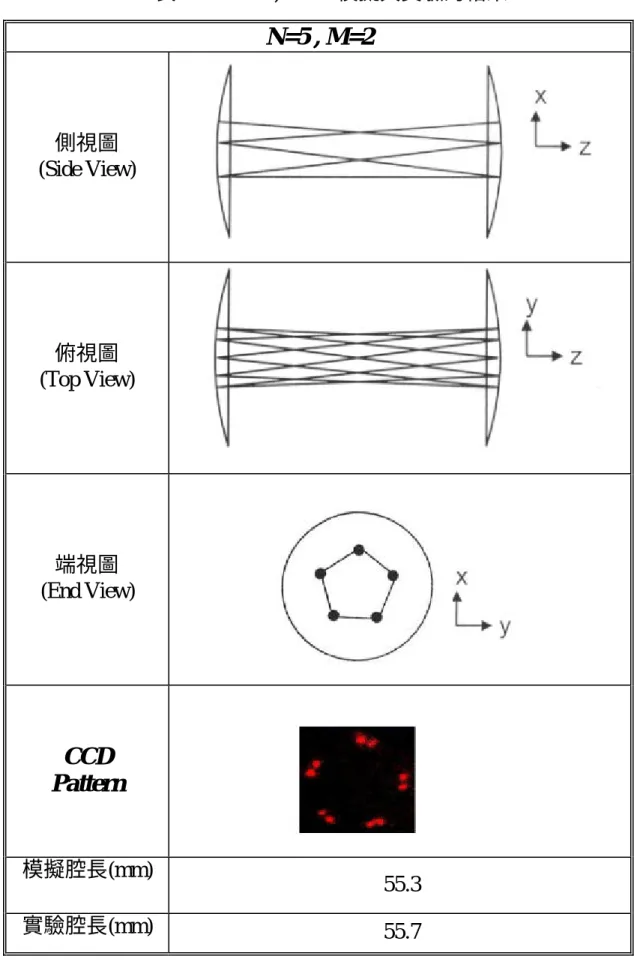
(29) 表 3-3. N=5 , M=2 模擬與實驗的結果. N=5 , M=2. 側視圖 (Side View). 俯視圖 (Top View). 端視圖 (End View). CCD Pattern. 模擬腔長(mm). 55.3. 實驗腔長(mm). 55.7. 29.
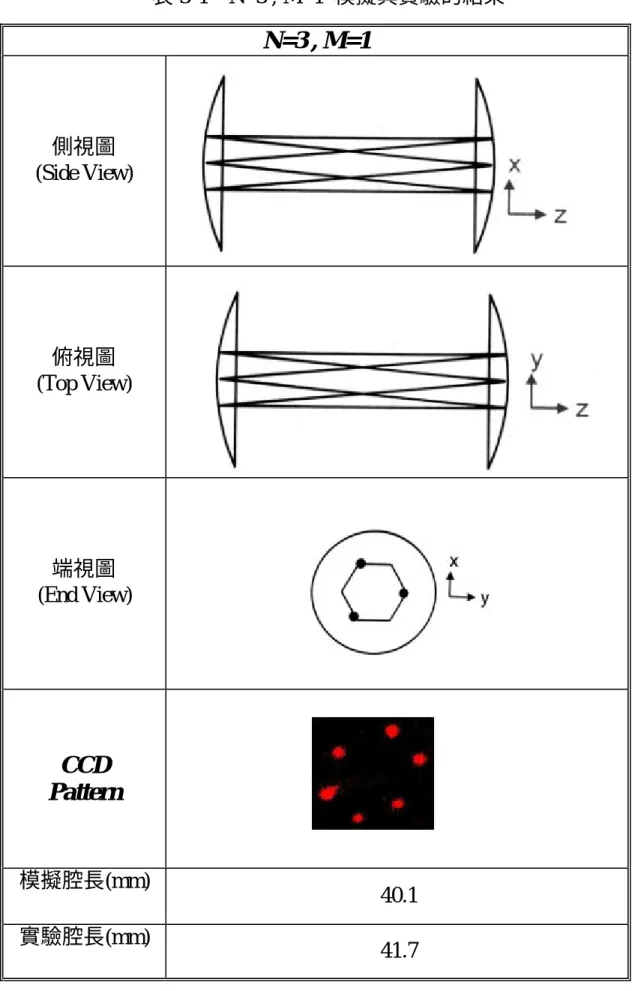
(30) 表 3-4. N=3 , M=1 模擬與實驗的結果. N=3 , M=1. 側視圖 (Side View). 俯視圖 (Top View). 端視圖 (End View). CCD Pattern. 模擬腔長(mm). 40.1. 實驗腔長(mm). 41.7. 30.
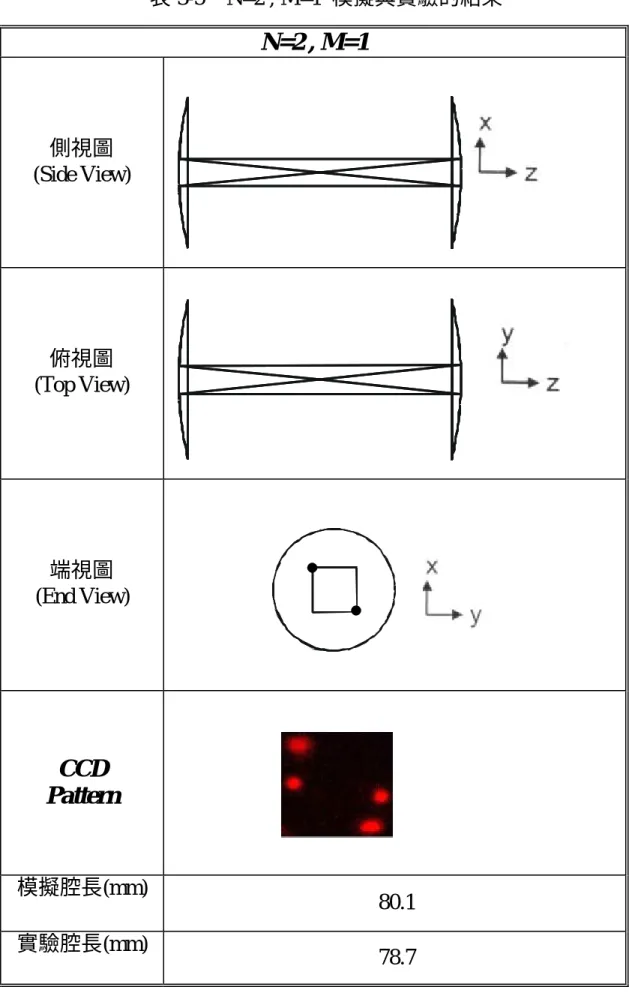
(31) 表 3-5. N=2 , M=1 模擬與實驗的結果. N=2 , M=1. 側視圖 (Side View). 俯視圖 (Top View). 端視圖 (End View). CCD Pattern. 模擬腔長(mm). 80.1. 實驗腔長(mm). 78.7. 31.
(32) 由表 3-1 至 3-5 中,其側視圖、俯視圖、端視圖是利用光學軟體 Beam4 模擬的結果,實驗結果是利用數位相機將投影在 IR card 上的雷 射輸出點數拍攝下來的,在圖 3-1 至 3-5 中,CCD pattern 是共振腔中雷 射雙向(bidirection)輸出的結果,我們可以將共振腔中加入一個 Faraday rotator 及磁鐵,使其產生法拉第效應,以形成單向(unidirection)的雷射 輸出,其實驗結果如圖 3.9。在端視圖中,其中有標記黑點的部分是表 示在同一個耦合鏡上的雷射輸出點數,我們可以發現有標記的黑點與沒 有標記的黑點之間彼此轉了一個角度,這個角度隨著雷射光在耦合鏡上 的輸出點數 N,及腔內的迴圈數 M 的不同,角度也不同,此角度就是 所謂的 2φ,物理意義為在 x y 平面上,光由第一點到第二點所轉的角度, 如 3.10 圖,以表 3-1 到 3-5 的五組輸出點數來說,其角度分別為下表, 這個角度在實際的實驗系統中,也成功地驗證出為表 3-6 中的數值。. 圖 3.9. 單向 N=2 , M=1 CCD pattern. 1 2. 2φ 3. 圖 3.10. 32. 端視圖.
(33) 表 3-6. 不同 N,M 的 2φ. N. M. 2φ (degree). 9. 5. 100.0. 7. 3. 77.2. 5. 2. 72.0. 3. 1. 60.0. 2. 1. 90.0. 由表 3-1 至 3-5 的端視圖中,除了發現有標記的黑點與沒有標記的 黑點之間彼此轉了一個角度之外,實驗腔長與模擬腔長的數值皆很相 近,為了更詳細的比較其之間的差異,我們將它整理成下表:. 表 3-7 腔 N. 長. M. N=9 N=7 N=5 N=3 N=2. M=5 M=3 M=2 M=1 M=1. 模擬腔長與實驗腔長的比較表. 模擬腔長 (mm). 實驗腔長 (mm). 有效腔長 (mm). 誤差值. 94.1 62.3 55.3 40.1 80.1. 93.7 62.7 55.7 41.7 78.7. 1692.2 868.1 554.2 240.6 320.4. 0.4% 0.6% 0.7% 1.9% 1.7%. 誤差值計算公式如下: 誤差值=. 模擬腔長 − 實驗腔長 × 100 % 模擬腔長. 33. (3.8).
(34) 其中有效腔長為 2NlNM,lNM 代表輸出點數為 N,雷射光在腔內的迴 圈數為 M 的系統架構中,雷射在輸出耦合透鏡上的光點與下一個在輸 入耦合透鏡上的雷射光點之間的距離,lNM 的公式如下,其詳細推導請 看附錄 B。. l NM = 2 R sin (. Mp Mp d ) 1 − cos2 ( ) cos2 [sin −1 ( ) ] 2N 2N R. ( 3.9 ). 由表 3-7,我們發現模擬腔長與實驗腔長的誤差值約在 1%左右,所 以我們已經成功地做出多次再入射之雙鏡式環形共振腔雷射系統,而且 利用基本的光學原理推導出的腔長公式,與實驗的腔長也相當吻合,並 在表 3-7 中,我們也發現,其誤差值與有效腔長成反比,其有效腔長即 為雷射光再完成一次 round trip 之後,在共振腔中實際走的距離。所以 由表 3-6 與 3-7,我們發現到,除了可以利用腔長來分辨 N,M 之外,2φ 角 也是判斷 N,M 的重要依據。. 為了實驗上的方便,及研究增益介質的側移與腔長的關係,我們利 用式(3.7). L Mπ d = {2 − 2 cos2 cos[sin −1 ( )]} ,觀察 d/R 與 L/R 對於 M/N R 2N R. 從 0.1 到 0.9 的關係。. 34.
(35) M/N=0.9. 2. M/N=0.7. L /R. 1.5 M/N=0.5 1. M/N=0.3. 0.5. M/N=0.1 0 0. 0.2. 0.4. 0.6. 0.8. 1. d /R. 圖 3.11. d/R 與 L/R 對於 M/N 從 0.1 到 0.9 的關係. 從圖 3.11 中我們可以發現,對於固定一個雷射光在耦合鏡上的輸出 點數 N,及腔內的迴圈數 M 來說,則增益介質的側移距離越長,則腔長 也越長,其中增益介質的側移距離與耦合鏡上雷射輸出光點和光軸的距 離 d 成正比。另外我們還發現,M/N 的比率越大,則腔長也越長,這個 結果,將有助於在實驗中,若預期出現 M/N 的比例比現在的 M/N 還大, 則微調腔長時則必須往長腔長的方向移動,以下並將上圖整理成下表, 方便實驗時對照。. 35.
(36) 表 3-8. 在 N≦10 的情況下,L/R 與(N,M)的對照表. L/R. (N,M). 0-0.1. (10,1) (9,1) (8,1) (7,1). 0.1-0.2. (6,1) (5,1). 0.2-0.3. (9,2) (4,1). 0.3-0.4. (7,2). 0.4-0.5. (10,3). 0.5-0.6. (3,1) (8,3). 0.6-0.7. (5,2). 0.7-0.8. (7,3). 0.8-0.9. (9,4). 1.0-1.1. (2,1). 1.1-1.2. (9,5). 1.2-1.3. (7,4). 1.3-1.4. (5,3) (8,5). 1.5-1.6. (3,2) (10,7). 1.6-1.7. (7,5) (4,3). 1.7-1.8. (9,7). 1.8-1.9. (5,4) (6,5) (7,6). 1.9-2. (8,7) (9,8) (10,9). 36.
(37) 瞭解對於特定的腔長會有固定 N,M 之後,我們對於在多少的腔長變 動範圍內,共振腔仍是一個穩定的系統,所以做了一個 cavity detuning. Output Power(mW). 的實驗,實驗的結果如下圖:. 0.035 0.03 0.025 0.02 0.015 0.01 0.005 0. ΔL. 3.275. 3.28. 3.285. L (mm) 圖 3.12. N=3 , M=1 的 cavity detuning 量測. Output Power(mW). 0.02 0.015 0.01 ΔL. 0.005 0 25.332. 25.336. 25.34. L (mm) 圖 3.13. N=7 , M=3 的 cavity detuning 量測. 37.
(38) 由圖 3.12 可知,共振腔在雷射光在耦合鏡上的輸出點數 N=3,及腔 內的迴圈數 M=1 的裝置下,則腔長可容許變動的半寬度為 3.7µm,由圖 3.13 可知,若在輸出點數 N=7,及腔內的迴圈數 M=3 的裝置下,則腔 長可容許變動的半寬度為 3.3µm,所以多次再入射之雙鏡式環形共振腔 雷射系統,在這兩個腔長變化範圍下仍是一個穩定的系統。. 另外我們也針對以上五種 N,M 做 L-I 的量測,以下的兩張圖是其中 的兩種 N,M,(N,M)=(2,1),(5,2). 輸出功率(mW). 0.25 0.2 0.15 0.1 0.05 0 0. 500. 1000. 1500. 2000. 幫浦電流(mA). 圖 3.14. N=2 , M=1 的 L-I curve. 38. 2500.
(39) 0.025. 輸出功率(mW). 0.02 0.015 0.01 0.005 0 0. 500. 1000. 1500. 2000. 2500. 幫浦電流 (mA). 圖 3.15. N=5 , M=2 的 L-I curve. 圖 3.14 及 3.15 是針對 N=2 , M=1 及 N=5 , M=2 做 L-I curve 的量測, 量測的方式是針對輸出耦合鏡上的一個雷射輸出點做量測,並利用濾鏡 擋掉 808nm 的光,若要得到總功率(total power),則必須將圖 3.14 及 3.15 的功率乘上 2N,其中乘 2 是因為共振腔中同時存在雙方向 1064nm 的雷 射光。本實驗架構使用輸出及輸入耦合鏡皆是對 1064nm 反射率 99.8% 的鍍膜,以提高腔內功率,適用於腔內倍頻雷射,若只是需要 IR 輸出, 則只要將輸出耦合鏡換成對 1064nm 反射率 94%的鍍膜,就可大幅提昇 IR 輸出。. 對於多次再入射之雙鏡式環形共振腔雷射系統的穩定性有一個初 步的認識之後,接著要討論的是對於固定某一個雷射光在耦合鏡上的輸 出點數 N,則腔內的迴圈數 M 的大小與腔長的關係。而另一方面,若固 定某一個腔內的迴圈數 M,則雷射光在耦合鏡上的輸出點數 N 的大小, 又跟腔長有何關係。. 39.
(40) 表 3-9 是固定固定某一個雷射光在耦合鏡上的輸出點數 N=5,為了 方便比較,將(N,M) =(5,1),(5,2), (5,3),(5,4)的俯視圖、端視圖及腔長都整 理成下表,而端視圖是從 x y 平面去看雷射的輸出情形,而俯視圖則是 從 y z 平面去看雷射光在共振腔的路徑。因為增益介質側移距離 d0 不同, 腔長也會有不同,所以下兩張圖表中的腔長是增益介質的側移距離 d0 =3mm 時的腔長。 表 3-9. N=5 , M=1、2、3、4. N=5 M. 端視圖 (End View). 俯視圖 (Top View). 腔長 (mm). 1. 15.39. 2. 55.39. 3. 104.83. 4. 144.83. 由表 3-9,我們可以發現,對於固定一個輸出點數 N=5,則腔內的迴 圈數 M 越大,則腔長也越長。 40.
(41) 表 3-10. M=3 , N=4、5、7、8. M=3 N. 端視圖 (End View). 俯視圖 (Top View). 腔長 (mm). 4. 135.69. 5. 104.83. 7. 60.76. 8. 47.57. 表 3-10 則是針對某一個腔內的迴圈數 M=3,(N,M) =(4,3),(5,3), (7,3),(8,3)的俯視圖、端視圖及腔長,我們可以發現,對於固定一個腔內 的迴圈數 M=3,則輸出點數 N 越大,則腔長也越短。. 41.
(42) 3.3. 近軸近似法與多次再入射之精確解析解的比較. 在 3.1 及 3.2 節中,我們對於利用近軸近似法與精確解析解的方法 分析多次再入射之雙鏡式環形共振腔雷射系統,有了一個完整的概念之 後,到底近軸近似法與精確解析解的分析方法有何不同,將在這一節中 做一個詳細的討論。. 目前立體八字形環形共振腔的再入射條件(reentrant condition)已完 整分析出,在不同的球面鏡半徑及腔長下,它可呈現出平面、立體及三 角形之路徑[6],如圖 3.16,而這些再入射條件與 A.Yariv 光電子學書中, 以近軸法所得之結果不同,例如對於共焦點式共振腔而言(即 R=L), A.Yariv 光電子學書中之近似解為平面八字環形,事實上應是三角形路 徑,至於立體八字形環形路徑,則完全未包含在 A.Yariv 之 general solution 內。. 1.5 1.4 1.3 1.2. 非共平面立體“8”字形. L/R. 1.1. 三角形線形. 1 0.9 0.8 0.7 0.6 0.5 0. 共平面“8”字形. 0.1. 0.2. 0.3. 0.4. 0.5. 0.6. 0.7. sin-1(d/R) 圖3.16. 雙鏡式共振腔三種雷射路徑 42. 0.8.
(43) 由第 3.1 節中,我們知道利用近軸近似分析多次再入射之雙鏡式環 形共振腔,可得φ yariv 與腔長分別為(3.4)式及(3.5)式: 2 vφ yariv = 2 lπ 其中l , v為整數. (3.4). L = 2 f (1 − cosφ yariv ). (3.5). 經由與精確解析解的分析方法得到的公式對照,發現以下的關係式: φ yariv = φ=. 2lπ 2v. Mπ 2N. Ql = M. v=N. ∴ φ yariv = 2φ. 所以我們可將(3.5)式化簡為下式: L = 1 − cos2φ R 其中φ=. (3.10). Mp 2?. N為雷射的輸出點數 M為腔內的迴圈數. 利用精確解析解的分析方法推導多次再入射之雙鏡式環形共振腔 d 雷射系統的腔長為式(3.7), L = R{2 − 2 cos2 φ cos[sin −1 ( )]},接下我們將 R. 針對固定輸出點數 N,或是固定腔內迴圈是 M,觀察近軸分析與精確解 析解的不同。. 43.
(44) 2.0. 精確解析解 近軸近似 1.5. (N,M)=(7,6). L/R. (N,M)=(7,3) (N,M)=(7,1) 1.0. 0.5. 0.0 0. 0.2. 0.4. 0.6. 0.8. 1. d/R. 圖 3.17 固定 N=7 近軸近似法與多次再入射之精確解析解的比較. 由圖 3.17 中,我們可以知道,因為利用近軸近似的分析的結果並沒 有考慮到增益介質的側移對腔長的影響,所以 d/R 一直增加其 L/R 仍然 不變。. 在固定雷射輸出點數 N=7 下,不管 M 為何,則 d/R=0.1 左右時, 近軸分析的結果與利用基本光學原理分析的結果皆很一致,其實主要是 因為 d/R=0.1 左右時,表示增益介質的側移距離很小,所以較符合近光 軸近似,所以兩種分析結果會相同。. 44.
(45) 2.0. 精確解析解 近軸近似 (N,M)=(2,1) (N,M)=(4,1). 1.5. L /R. (N,M)=(10,1). 1.0. 0.5. 0.0 0. 0.2. 0.4. 0.6. 0.8. 1. 1.2. d /R. 圖 3.18. 固定 M=1 近軸近似法與多次再入射之精確解析解的比較. 由圖 3.17 及 3.18 中,我們可以發現,以圖 3.17 為例,當固定雷射 的輸出點數 N=7 時,當 M 越小,則腔長越短,相較之下增益介質的側 移對於短腔長而言,就較不符合近軸近似的原理,所以圖 3.17 中,我們 可以發現到,當 M 越小時,則 d/R 越大,其兩種的分析結果也差越多。 在圖 3.18 中,當固定雷射的腔內迴圈數 M=1 時,當 N 越大,則腔長越 短,相較之下增益介質的側移對於短腔長而言,就較不符合近軸近似的 原理,所以圖 3.18 中,我們可以發現到,當 N 越大時,則 d/R 越大,其 兩種的分析結果也差越多。. 45.
(46) 3.4. 比較 TEM01 與立體八字形的差異. 對於多次再入射之雙鏡式環形共振腔有了一個完整的認識之後,我 們對於非共平面之八字形立體環形共振腔與 TEM01 mode,在增益介質 側移距離很小時到底有何不同,做了一個分析如下:. 非共平面之八字形立體環形共振腔的腔長與增益介質的側移距離 為以下關係式:增益介質的側移距離 d0 定義為增益介質的中心離光軸的 垂直距離 L figure− 8 = 2 R −. R 2 − 2 d 02. (3.11). 其中 d01 定義為增益介質的中心離光軸的垂直距離 對於 TEM01 mode,其強度的分佈中有兩個極大值,其腔長與最大 強度離光軸的距離可利用公式推導如下,詳見附錄 C:. LTEM = R + 01. 16 π 2d 014 R − λ2 2. (3.12). 其中 d01 定義為最大強度離光軸的的距離 λ為雷射的波長. 經過一連串的運算,我們發現,當 d 0 = d 01 ≈. R? 時,則 TEM01 和 4p. 非共平面之八字形立體環形共振腔有相同的腔長,如圖 3.19。而且對於 不同的曲率半徑的耦合鏡,則耦合鏡的曲率半徑的越大,則 TEM01 和 非共平面之八字形立體環形共振腔的腔長相差就越大,如圖 3.20。. 46.
(47) R =80mm λ=1.064 µm 180 L (TEM01). 160. L (mm). 140 120 100 L (Figure 8). 80 60 0. 0.02. 0.04. 0.06. 0.08. 0.1. Beam Center Offset (mm). 圖 3.19. TEM01 mode 與立體八字形腔長的比較圖. 90 80. R =80mm. ΔL(mm). 70 60 50 R =50mm. 40 30 20 10 0 0. 0.02. 0.04. 0.06. 0.08. 0.1. Beam Center Offset (mm). 圖 3.20. TEM01 mode 與立體八字形 對於不同曲率半徑的腔長差值的比較圖. 47.
(48) 第四章 共振腔的設計與穩定性分析. 對於多次再入射之環形共振腔的原理及多次再入射條件之分析有 了一個具體的概念之後,本章將對於多次再入射之環形共振腔的系統架 構,做一個完整的介紹之外,也針對空腔及加入增益介質的雷射共振腔 穩定性,做一個有系統的分析。. 4.1 共振腔的設計. 圖 4.1 所示為多次再入射之雙鏡式環形共振腔雷射的系統架構,使 用兩面耦合透鏡組成一個立體環形共振腔,及一個雙凸透鏡與輸入端的 耦合透鏡組成一透鏡組將半導體雷射光聚焦,而聚焦後的激發光源自共 振腔中心軸水平距離 d0 處且平行於鏡軸方向進入共振腔內激發增益介 質,適當的調整增益介質的傾斜角及共振腔的腔長,則經由增益介質釋 放出來的基頻雷射光將於此環形共振腔內依循適當的光路徑來回振盪 放大。系統中包括雷射二極體與聚焦透鏡構成的幫浦系統,增益介質及 輸入端及輸出端的耦合透鏡組成的共振腔,下面將分別介紹這些部分以 說明雷射的工作原理。. 雷射二極體. 輸入耦合鏡. 輸出耦合鏡 增益介質 d0. 聚焦透鏡. 雷射輸出 光軸. 光纖透鏡. 圖 4.1 多次再入射之雙鏡式環形共振腔雷射之系統架構 48.
(49) 幫浦光源:. 雷射二極體的幫浦方式一般可分橫向與縱向幫浦 (side and end pumping),傳統的固態雷射多採用閃光燈(flash lamp)作為橫向幫浦光 源,如今固態雷射則改用雷射二極體作為縱向幫浦的光源,以獲得較高 的幫浦效率,因為比起傳統的閃光燈,高功率半導體雷射的頻譜集中在 1 至 5nm 的範圍,與固態雷射的吸收頻寬相當,因此幫浦的光功率可大 幅下降,減少許多熱效應,也因此提昇了固態雷射的穩定性,同時固態 雷射的電光轉換效率高,所以其壽命也較傳統閃光燈長,可達數萬小 時。而且半導體雷射本身的體積遠比傳統幫浦光源的龐大設備小很多, 將縮小整個雷射系統體積。本論文使用 2W 的雷射二極體作為幫浦光源, 其詳細資料如表 4-1 所示:. 表 4-1 雷射二極體規格表 LD 型號. 輸出功率 (W). 波長. Polaroid. 譜線寬度. (nm@室溫) (nm @FWHM). 2. 807. 2.0. X9844C-P7998. 光束發散角 θ∥. θ⊥. 10°. 2°. 雷射二極體亮度的定義: B =. P AΩ. (4.1). B:亮度 P:雷射輸出功率 A:雷射二極體發光面積 Ω:雷射二極體發光立體角. 49.
(50) 一般雷射二極體,100μm 的發光寬度下約有 1W 輸出功率,本論 文就是使用此種雷射二極體,另一種雷射二極體,100μm 的發光寬度 下約有 2W 輸出功率,稱為高亮度雷射二極體。但由於半導體增益介質 中的功率密度是一般雷射二極體的兩倍,所以產生的高熱需靠良好的散 熱裝置移除,一般使用較大的散熱基座,在雷射二極體與散熱基座的接 面塗以散熱膏或加墊銦片,否則雷射二極體極因過熱而損壞。. 共振腔鏡面上的發光區域多呈長方形,特別是雷射二極體共振腔的 高度比波長還短,因此輸出之雷射光的發散角相當大,在 10°∼40°之 間,呈橢圓形。而雷射二極體的發光端面上可以有橫向的光纖耦合透鏡 (fiber-lens collimated),以矯正其垂直發散角,方便使用時以單一聚焦透 鏡便能得到適當的幫浦模態。. 聚焦透鏡:. 利用聚焦透鏡可將雷射二極體發出來 808nm 波長的光聚焦至增益 介質上,目前本實驗架構所使用聚焦透鏡的聚焦長度(focal length)為 25mm,直徑(φ)為 12.7mm 及曲率半徑(radius of curvature)為 25.28mm, 適當地調整與雷射二極體及輸入端耦合透鏡間的距離,能改變幫浦光點 的模態及焦點位置,以配合雷射共振腔模態,有效提升光對光的轉換效 率,減少多餘的熱產生,而且也較易得到基態橫模(TEM00),達到最佳 的模態匹配(mode matching)。. 50.
(51) 雷射共振腔:. 基於體積小、降低成本及易於調整控制等因素,實驗裝置的雷射共 振腔我們利用兩個曲率半徑為 80mm 及直徑為 25.4mm(φ)的凹面鏡,凹 面鏡的凹面部分鍍有對 1064nm 反 射 率 大 於 99.8%的介電質鍍膜 (dielectric coating),使波長 808nm 的半導體雷射光通過,激發 Nd:YAG 晶體,但無法讓波長 1064nm 的被激發光通過,因此便可得到在腔內振 盪及雷射輸出波長為 1064nm 的激發光。 增益介質: 本實驗中所使用的增益介質為 Nd:YAG(Nd3+:Y3Al5O12),中文名稱 為摻釹釔鋁石榴石,英文名稱為 Neodymium Doped Yttrium. Aluminum. Garnet,Nd3+離子的摻雜濃度為 3%,大小為 3 毫米×3 毫米×1 毫米 (mm3 )。近十年,以閃光燈作為橫向幫浦光源的固態雷射,因為光對光 的轉換效率並不高,因此需要較長的增益介質,以達到相同的轉換效 率,但是如此長度的增益介質,在共振腔中容易造成雷射光路徑的扭曲 嚴重,而破壞雷射光路徑在共振腔的對稱性,如今縱向幫浦的固態雷 射,提昇了光對光的轉換效率,也直接的解決了不能利用雙鏡做出環形 共振腔的問題。. 51.
(52) 4.2 雷射共振腔穩定性分析—空腔. 1 共振腔的穩定度 ( A + D),在物理上的意義是任意光線在共振腔內 2. 往返任意多次後都不會橫向偏折出共振腔外。下圖是輸出點數為 3,雷 射光在腔內的迴圈數為 1 即(N=3 , M=1)的側視圖,為了分析共振腔的穩 定性,在此以 ABCD 矩陣(matrix)方式處理基本的 Gaussian 光束傳播, 而光腰大小及其位置是光學共振腔的基本參數,因為我們目的是想要瞭 解增益介質上的雷射光束的大小,所以選擇 L/2 處為參考面。. M1. M2. L 圖 4.2. N=3 , M=1 的空腔側視圖. 定義 M1,M2,M3 矩陣: M1 矩陣為光線由 L/2 到 m2 的 Ray Matrix: 1 M1 = 0 . l31 2 1 . (4.2). 其中 l31 代表輸出點數為 3,雷射光在腔內的迴圈數為 1 即(N=3, M=1)的系統架構中,雷射在輸出耦合透鏡上的光點與下一個在輸入耦合 透鏡上的雷射光點之間的距離。 M2 矩陣為光線由經由 M2 反射的 Ray Matrix: 52.
(53) 1 M2 = − 2 R. 0 1 . (4.3). M3 矩陣為光線由經由 M2 至 M1 的 Ray Matrix:. 1 M3 = 0. l31 1 . (4.4). 則任意光線在腔內往返一週的矩陣 ABCD,Mrt 為. M rt = M1 M2 M3 M 2 M3 M 2 M3 M 2 M3 M 2 M 3M 2 M1. (4.5). = M1 M2 ( M3 M 2 )5 M1 A B ∴ C D. 5. l31 1 l 1 0 l31 1 1 31 = − 2 2 2 0 1 0 1 R 1 0 1 . (4.6). 上式是以輸出點數為 3,雷射光在腔內的迴圈數為 1 即(N=3,. M=1)為. 例,如果以輸出點數為 4,雷射光在腔內的迴圈數為 1 即(N=4,. M=1) ,. 則任意光線在腔內往返一週的矩陣 ABCD 則變成下式: M rt = M 1 M 2 M 3 M 2 M 3 M 2 M 3 M 2 M 3 M 2 M 3 M 2 M 3 M 2 M 3 M 2 M 1. (4.7). = M 1 M 2 (M 3 M 2 )7 M 1. 所以我們可以得到一個重要的結論,如果以輸出點數為 N,雷射光 53.
(54) 在腔內的迴圈數為 M,則任意光線在腔內往返一週的矩陣 ABCD,可以 一般化為下式: M rt = M 1 M 2 M 3 M 2 M 3 M 2 M 3 M 2 M 3 M 2 M 3 M 2 .................M 1. (4.8). = M 1M 2 ( M 3M 2 ) 2 N −1 M 1 其中M 1 , M 2 , M 3分別定義為: 1 M1 = 0 1 M2 = − 2 R 1 M3 = 0. l NM 2 1 . (4.9). 0 1 . (4.10). l NM 1 . (4.11). 其中 lNM 代表輸出點數為 N,雷射光在腔內的迴圈數為 M 的系統架 構中,雷射在輸出耦合透鏡上的光點與下一個在輸入耦合透鏡上的雷射 光點之間的距離,lNM 的公式如下:. l NM = 2 R sin (. Mp Mp d ) 1 − cos2 ( ) cos2 [sin − 1 ( ) ] 2N 2N R. ( 4.12). d 為在耦合鏡上雷射的輸出點數與光軸的距離. 由(4.6)式我們瞭解了任意光線在腔內往返一週的矩陣關係式,所以. 54.
(55) 接著必須考慮共振腔穩定性,共振腔穩定條件的基本式為. − 1≤. 1 ( A + D) ≤ 1 2. (4.13). 在 L/2 處參考面的曲率半徑 R1 和光腰ω 1 為. R1 =. 2B D−A. λ ω1 = πn . (4.14). 1/2. B 2 A+ D 1 − 2 . 1/ 4. (4.15). 為了使上述穩定條件進一步簡化,可引入兩個表示共振腔穩定因子 g1,g2: g1 = 1 −. L R. (4.16). g2 = 1 −. L R. (4.17). 由此可將一般穩定條件簡化為: 0 ≤ g 1 ⋅g 2 ≤ 1. (4.18). 當上述條件得到滿足時,腔內任意光線均可往返無限次數而不會橫 向偏折腔外。. 55.
(56) 利用電腦程式軟體 Fortran,針對不同的輸出點數 N 及雷射光在腔 內的迴圈數 M,模擬其共振腔的穩定度及在 L/2 處的 spot size,詳細的 程式內容可參照本論文的附錄二,我們發現 g1.g2 皆小於 1,也就是共 振腔是符合穩定共振腔的條件,即是下圖所表示的穩定腔中。. g1 g1.g2=1 非穩定腔 穩定腔. g2. 穩定腔 非穩定腔 g1.g2=1. 圖 4.3 光學共振腔穩定條件區域圖 我們對於不同的輸出點數 N 及雷射光在腔內的迴圈數 M,在共振腔 的穩定性有一個認識之後,接著我們來探討一下分別固定某一個輸出點 數 N,或固定某一個雷射光在腔內的迴圈數 M,其雷射光在輸出耦合鏡 上距離鏡軸的距離 d 除以曲率半徑 R 與穩定度的關係。. 首先我們先研究固定輸出點數 N=5 其雷射光在輸出耦合鏡上距離 鏡軸的距離 d 除以曲率半徑 R 與穩定度的關係,接著再著手於固定雷射 光在腔內的迴圈數 M=1,其雷射光在輸出耦合鏡上距離鏡軸的距離 d 除以曲率半徑 R 與穩定度的關係。. 56.
(57) 1.0. M=4. 穩定度. 0.5. M=3. 0.0. M=2 M=1 -0.5. -1.0 0.0. 0.2. 0.4. 0.6. 0.8. 1.0. d /R. 圖 4.4 固定輸出點數 N=5 其 d/R 與空腔穩定度的關係圖. 由圖 4.4 可知,以固定某一個輸出點數 N=5 及固定雷射光距離鏡軸 的距離 d 除以曲率半徑R 下,則穩定度的靈敏度隨雷射光在腔內的迴圈數 M 的減少而增高,因為雷射光在輸出耦合鏡上距離鏡軸的距離 d 與增益 介質側移距離 d0 是呈現正比的關係,所以我們可以說固定某一個輸出點 數 N=5 及固定增益介質側移距離 d0 下,則穩定度的靈敏度隨雷射光在腔 內的迴圈數 M 的減少而增高。. 57.
(58) 1.0. N=2. 穩定度. 0.5. N=3 N=4. 0.0. N=5. -0.5. -1.0 0.0. 0.2. 0.4. 0.6. 0.8. 1.0. d /R. 圖 4.5 固定雷射光在腔內迴圈數 M=1 其 d/R 與空腔穩定度的關係. 固定某一個雷射光在腔內的迴圈數 M=1,針對雷射光輸出點數的不 同,其中 N=2、3、4 與 5,觀察其 d/R 與穩定度的關係,由圖 4.5 可知, 固定雷射光在輸出耦合鏡上距離鏡軸的距離d 除以曲率半徑R 下,則穩定 度的靈敏度隨輸出點數 N 的增加而昇高,因為雷射光在輸出耦合鏡上距 離鏡軸的距離 d 與增益介質側移距離 d0 是呈現正比的關係,所以我們可 以說固定某一個雷射光在腔內的迴圈數 M=1 及固定增益介質側移距離 d0 下,則穩定度的靈敏度隨輸出點數 N 的增加而昇高。以下並列出固定 N=5 及固定 M=1 的 spot size 與 d/R 的關係圖,由圖 4.7 中,我們發現在 固定 M=1 且 M/N<0.5 的情況下,則 spot size 隨著 d 的增加而增加,若 M/N ≥ 0.5 則 spot size 隨著 d 的增加而減小。. 58.
(59) 0.24 M=2. 0.23. M=3. Spot Size(mm). 0.22 0.21 0.20 0.19. M=1. 0.18 M=4. 0.17 0.16 0.15 0.0. 0.2. 0.4. 0.6. 0.8. 1.0. d /R. 圖 4.6 固定輸出點數 N=5 其 d/R 與空腔 spot size 的關係圖 0.24. N=2 M=1 0.23. N=3 M=1. Spot Size(mm). 0.22. N=3 M=2. 0.21 0.20. N=4 M=1 0.19 0.18. N=5 M=1 0.17 0.0. 0.2. 0.4. 0.6. 0.8. 1.0. d /R. 圖 4.7 固定輸出點數 M=1 其 d/R 與空腔 spot size 的關係圖. 4.3 雷射共振腔穩定性分析—加入增益介質 59.
(60) 由 4.1 節中對於空腔的穩定性及基本原理有一個認識之後,接著將增 益介質加入空腔中,討論雷射共振腔的穩定性及穩定性與增益介質側移 距離 d0 的關係,以輸出點數為 3,雷射光在腔內的迴圈數為 1 即(N=3 , M=1)為例,下圖是實際雷射共振腔的側視圖。. M1. M2. L 圖 4.8. N=3 , M=1 的雷射共振腔側視圖. 多次再入射之雙鏡式環形共振腔中所使用的增益介質是 Nd:YAG, Nd3+離子的摻雜濃度為 3%,大小為 3 毫米×3 毫米×1 毫米(mm3)。利 用 Fortran 電腦程式軟體模擬雷射共振腔的穩定性及在增益介質上 spot size 大小。因為在實際共振腔中放入一個厚度 l 毫米的 Nd:YAG 時,lNM 必須做一個調整。. ' l NM = l NM +. l n Nd:YAG. −l. 其中n Nd:YAG = 1.82. (4.19). 上式中的 l 為增益介質的厚度,而 nNd:YAG 為增益介質的折射率, lNM 代表輸出點數為 N,雷射光在腔內的迴圈數為 M 的系統架構中,雷 射在輸出耦合透鏡上的光點與下一個在輸入耦合透鏡上的雷射光點之 間的距離。 ' 將 l NM 代入附錄一的 Fortran 程式中,取代 l NM ,針對不同的輸出點數. 60.
(61) N 及雷射光在腔內的迴圈數 M,模擬共振腔的穩定度及在增益介質上的 spot size,發現模擬後的結果,與空腔的穩定度有些不同,以下分別討 論之。. 首先研究固定輸出點數 N=5 其雷射光在輸出耦合鏡上距離鏡軸的 距離 d 除以曲率半徑 R 與穩定度的關係。. 0.0E+00. 2.0E-02. 4.0E-02. 6.0E-02. 8.0E-02. 1.0E-01. -1.5E-05 -1.0E-05. 1-q. -5.0E-06 0.0E+00 5.0E-06 1.0E-05. M=1. 2. 3. 4. 1.5E-05. d /R. 圖 4.9 固定輸出點數 N=5 其 d/R 與 1-q 的關係圖 1 其中 q 代表的是穩定度 ( A + D) 2. 將增益介質加入共振腔中,穩定度並不像空腔一樣,在 d 為任何值 61.
(62) 時皆小於 1,以圖 4.9 中固定 N=5 為例,若雷射光在腔內的迴圈數 M 不 同,則雷射共振腔要達到平衡時的 d 也不同,也就是說不同的迴圈數 M, 要使環形的共振腔達到穩定,則增益介質的側移距離也不同,由圖 4.9 可知,固定某一個輸出點數 N=5,則雷射光在腔內的迴圈數 M 愈大, 環形共振腔要穩定,增益介質的側移 d0 也需愈大,這一點是與空腔的穩 定性質最不同的地方。. 再者,由圖 4.9 可知,以固定某一個輸出點數 N=5 及固定雷射光距 離鏡軸的距離d 除以曲率半徑R 下,則穩定度的靈敏度隨雷射光在腔內的 迴圈數 M 的減少而增高,因為雷射光在輸出耦合鏡上距離鏡軸的距離 d 與增益介質側移距離 d0 是呈現正比的關係,所以我們可以說固定某一個 輸出點數 N=5 及固定增益介質側移距離 d0 下,則穩定度的靈敏度隨雷射 光在腔內的迴圈數 M 的減少而增高,這一點與空腔的穩定性質相同。. 接下來我們由另一個方向去討論雷射共振腔的穩定性,固定雷射光 在腔內的迴圈數 M=1,其雷射光在輸出耦合鏡上距離鏡軸的距離 d 除以 曲率半徑 R 與穩定度的關係。. 62.
(63) 0.0E+00 2.0E-02 4.0E-02 6.0E-02 8.0E-02 1.0E-01 -1.5E-05 -1.0E-05. 1-q. -5.0E-06 0.0E+00 5.0E-06 1.0E-05 1.5E-05. N=5. 4. 3. 2. d /R. 圖 4.10 固定雷射光在腔內的迴圈數 M=1 其 d/R 與 1-q 的關係 1 其中 q 代表的是穩定度 ( A + D) 2. 圖 4.10 中固定雷射光在腔內的迴圈數 M=1,若雷射光輸出點數 N 不同,則雷射共振腔要達到平衡時的 d 也不同,也就是說不同的雷射光 輸出點數 N,要使環形的共振腔達到穩定,則增益介質的側移距離也不 同,由圖 4.10 可知,固定雷射光在腔內的迴圈數 M=1,則雷射光輸出 點數 N 愈小,環形共振腔要穩定,增益介質的側移 d0 需愈大,這一點 也是與空腔的穩定性質不同的地方。. 經由以上的介紹,我們可以得到一個結論,無論是固定雷射光的輸 出點數 N,或是固定雷射光在腔內的迴圈數 M,若腔長越長,環形共振 腔若要達到穩定,則增益介質的側移距離 d0 也需越長,換言之,若實驗 上要做較長腔長的輸出點數,使用較大的耦合透鏡,此共振腔穩定性較 佳。 63.
(64) 由圖 4.9 及圖 4.10 我們可以發現,將增益介質加入共振腔中,穩定 度並不像空腔一樣,在 d 為任何值時皆小於 1,對於一個特定的 N,M 值, 要使雷射共振腔要達到穩定,則也存在一個特定的 d,也就是說,要使 環形的共振腔達到穩定,則增益介質的側移距離也不同。在我們的實驗 架構中,我們實際對(N,M)=(3,1), (5,2), (7,3)這三組做實驗,實驗的方法 增益介質從距離光軸中心約 3mm 處開始往光軸方向移動,直到雷射不 lasing 為止,計算其共振腔欲達到穩定時增益介質最小的側移,並整理 成下表: 表 4-1. 增益介質的最小側移之模擬值與實驗值的對照表. N M 增益介質的最小側移 (模擬值)(mm) 3 1 2.70. 增益介質的最小側移 (實驗值) (mm) 2.97. 10.0%. 差值. 5. 2. 1.99. 1.81. 9.5%. 7. 3. 1.74. 1.92. 10.3%. 誤差值計算公式如下: 誤差值=. 模擬值 − 實驗值 × 100 % 模擬值. (4.20). 由表 4.1,我們可以發現,其模擬增益介質側移的最小值與實驗的 數值約有 10%的差值,所以我們可以說,利用 ABCD 矩陣模擬共振腔 的穩定性仍有一定的準確性,但對於共振腔的穩定性分析,若能考慮此 共振腔的非正交特性,作一個嚴謹的分析,相信可以更具體的瞭解共振 腔的穩定性,因為對雷射理論而言,由於此共振腔屬於非正交系統,因 此無法以 ABCD 矩陣分析其橫模穩定性及光腰尺寸,有必要由高斯波束 理論出發,針對光行進平面的多次旋轉,加以分析。. 64.
(65) 對於共振腔中加入增益介質,會破壞共振腔的對稱性,為了減少因 為加入增益介質而造成的共振腔對稱性的破壞,所以多次再入射之雙鏡 式環形共振腔中所使用的增益介質是 Nd:YAG,其 Nd3+離子的摻雜濃度 為 3%,大小為 3 毫米×3 毫米×1 毫米(mm3),以下並針對立體八字環 形即雷射輸出點數為 2,腔內迴圈數為 1,討論不同增益介質的厚度對 穩定度的影響。. 1.0010 1.0005. 0.1. 穩定度. 1.0000. 0.05. 0.9995. 0.01. 0.9990 0.9985. t eff =0.005. 0.9980 0.9975 0.9970 0.00. 0.05. 0.10. 0.15. 0.20. 0.25. 0.30. d /R. 圖 4.11. 立體八字環形不同增益介質的厚度對穩定度的影響. 在上圖中,其 teff 意指為增益介質的有效厚度,定義為: t eff = (1 −. 1 n Nd :YAG. ). t R. (4.21). 其中 n Nd:YAG為Nd : YAG的折射率 t 為增益介質的厚度 R為耦合鏡的曲率半徑. 由圖 4.11 中,我們可以得到一個結論,對於共振腔的增益介質,如 果增益介質的厚度越大,則共振腔的穩定性越差。 65.
(66) 第五章. 結論. 我們已成功的首度研發出多次再入射之雙鏡式環形共振腔雷射系 統,共振腔只利用兩面耦合鏡及一個增益介質組成,是具有體積小、元 件少、無散光像差、設計簡單等優點,未來極具商業應用價值。. 我們已經完成依理論分析模式,推導出腔長與輸出點數 N、腔內迴 圈數 M 及增益介質中心與光軸的距離 d 的關係式,並以實驗加以驗證, 發現模擬腔長與實驗腔長約只有 1%左右的誤差,在實驗部分已成功驗 證(N,M)=(2,1), (3,1), (5,2), (7,3), (9,5)等情況。對於此共振腔的再入射條 件(reentrant condition)已有完整的分析,而且這些再入射條件在 d/R<0.1 時,與 A.Yariv 光電子學書中利用近軸分析的結果相近,因為在 d/R<0.1 時,增益介質的側移是符合近軸近似的分析。當 d/R>0.1 時,我們的分 析結果與 A.Yariv 的結果相當不同,因為 A.Yariv 並沒有考慮到實際上增 益介質的側移對腔長的影響。. 對於 TEM01 mode 與立體八字形環形共振腔的差異,我們也已經分 析出在 d 0 = d 01 ≈. R? 4p. 時,則 TEM01 和非共平面之八字形立體環形. 共振腔有相同的腔長。對於共振腔的穩定性,我們已經分析出空腔及加 入增益介質的共振腔穩定性,並以實驗加以驗證,其模擬增益介質側移 的臨界值與實驗的數值約有 10%的差值。. 對於共振腔的穩定性分析,若能考慮此共振腔的非正交特性,作一 個嚴謹的分析,相信可以更具體的瞭解共振腔的穩定性,因為對雷射理 論而言,由於此共振腔屬於非正交系統,因此無法以 ABCD 矩陣分析其 66.
(67) 橫模穩定性及光腰尺寸,有必要由高斯波束理論出發,針對光行進平面 的多次旋轉,加以分析。另外若能考慮共振腔中是否只存在除了平面八 字形外其他的平面解,這將有助於使雙鏡式環型共振腔的研究更完備, 相信我們的研究成果與累積的經驗,對雙鏡式環形共振腔上的研究,可 有很大的幫助。. 67.
(68) 參考文獻 [1]. T. J. Kane and R. L. Byer,“Monolithic unidirectional single-mode Nd:YAG ring laser,”Optics Letters, vol.10, no. 2, pp. 65-67, 1985.. [2]. J. L. Nightingale and J. K. Johnson,“Single frequency ring laser with two reflecting surface,”U. S. patent 5,052,815, 1991.. [3]. M. D. Selker, T. J. Johnston, G. Frangineas, J. L. Nightingale, and D. K. Negus,“>8.5 watts of single frequency 532 nm light from a diode pumped intracavity doubled ring laser,”Conference on Lasers and Electro-Optics, CPD-21, 1996.. [4]. D. Herriott, H. Kogelnik, and R. Kompfner, “Off-axis paths in spherical mirror interferometers,” Applied Optics, vol. 3, no. 4, pp. 523-526, 1964.. [5]. A. E. Siegman, Lasers. Mill Valley, California: University Science Books, 1986, ch. 29.6.. [6]. H. Z. Cheng, P. L. Huang, and S. L. Huang,“Reentrant two- mirror ring resonator for generation of a single-frequency green laser,”Optics Letters, vol. 25, no. 8, pp. 542-544, 2000.. [7]. NEW FOCUS catalog, vol. 8, pp. 34-35, 1997/98.. [8]. K. Taguchi, K. Fukushima, A. Ishitani, and M. Ikeda,“Proposal of a Semiconductor Ring Laser Gyroscope,”Optical and Quantum Electronics, vol. 31, no.12, pp. 1219-1226, 1999.. [9]. A. Yariv, Optical Electronics in Modern Communication. 5th ed., Chap. 2.2, 1997.. [10]. S. L. Huang, H. Z. Cheng, and P. L. Huang, “Reentrant two- mirror laser ring cavity for the generation of single frequency green laser,” Advanced Solid-State Lasers, ME3, Davos, Switzerland, 2000.. [11]. 翁義龍,“腔內倍頻之被動式Q開關藍光雷射,”國立中山大學光電工 程研究所碩士論文,2000.. [12]. B. E. A. Saleh, M. C. Teich, Fundamentals of Photonics. Wiley Interscience Books, 1991.. [13]. 林敬舜,“聲光調制器對半導體雷射幫浦的鎖模Nd:YLF雷射的影響,” 國立中山大學光電工程研究所碩士論文,1995. 68.
(69) [14]. P. L. Huang, H. Z. Cheng, and S. L. Huang, “Timing-jitter reduction of passively Q-switched laser by a reentrant 2- mirror ring cavity,” Conf. on Lasers and Electro-Optics (CLEO), paper CThM2, San Francisco, CA, U.S.A, 2000.. [15]. S. L. Huang, H. Z. Cheng, and P. L. Huang, invited, “Compact solid-state visible lasers,” Optics and Photonics Taiwan, FR-III5-C-1, 1999.. [16]. S. L. Huang, J. W. Lin, C. C. Kang, and H. Z. Cheng, “Diode- laser pumped high-power and actively mode- locked Nd:YLF laser with fast switching,” Optical and Quantum Electronics, vol. 32, pp. 609-617, 2000.. [17]. G. T. Maker and G. P. A. Malcolm,“Single- frequency diode-pumped Nd:YAG ring laser with no intracavity elements, ” Optics Letters, vol.18, no.21, pp.1813-1815, 1993.. [18]. S. L. Huang, H. Z. Cheng, and P. L. Huang, invited, “Compact solid-state green laser and its application in microwave generation,” International Microwave and Optoelectronics Conference, Th-A2-1 , Rio de Janeiro, Brazil, 1999.. [19]. I. Freitag, A. Tunnermann, and H. Welling,“Passively Q-switched Nd:YAG ring laser with high average output power in single-frequency operation,” Optics Letters, vol. 22, no.10, pp.706-708, 1997.. [20]. Y. L. Weng, H. Z. Cheng, S. L. Huang, and F. J. Kao, “Passively Q-switched and intracavity frequency-doubled blue laser,” Optics and Photonics Taiwan, PC-1, 1999.. [21]. S. L. Huang , T. Y. Tsui, C. H. Wang, and F. J. Kao, “Timing jitter reduction of a passively Q-switched laser, ” Japanese journal of applied physics, vol. 38, L239-241, 1999.. [22]. C. H. Rowe, U. K. Schreiber, S. J. Cooper, B. T. King, M. Poulton, and G. E. Stedman, “ Design and operation of a very large ring laser gyroscope ,”Applied Optics, vol. 38, no. 12, pp. 2516-2523, 1999.. [23]. D. Hargis and A. Earman,“Diode-pumped microlasers promise portable projectors, ”Laser Focus World, vol. 34, no. 5, pp. 253-251 1998.. [24]. D. Hargis and A. Earman,“Lasers replace conventional technology in display designs,”Laser Focus World, vol. 34, no. 7, pp. 145-149, 1998.. 69.
(70) [25]. Altmann, R. Baumgart, and C, Weitkamp,“Two- mirror multipass absorption cell,”Applied Optics, vol. 20, no. 6, pp. 995-999 , 1981.. [26]. D. Kaur, A. M. de Souza, J. Wanna, S. A. Hammad, L. Mercorelli, and D. S. Perry,“Multipass cell for molecular beam absorption spectroscopy, ”Applied Optics, vol. 29, no. 1, pp. 119-124, 1990.. [27]. D. Nickel, D. Kuhlke, and D. von der Linde,“Multipass dye-cell amplifier for high-repetition-rate femtosecond optical pulses,” Optical Letters, vol. 14, no. 1, pp. 36-38, 1989.. [28]. G. W. Haggquist and K. R. Naqvi, “A simple method for prolonging the effective pathlength in laser kinetic spectroscopy, ”Review of Scientific Instrument, vol. 65, no. 7, pp. 2188-2189, 1994.. [29]. 李齊湘、嚴立、黃升龍,“超快光電技術及其應用,”光電科技資料叢 書,1999.. [30]. 黃升龍、謝鴻生、高甫仁,“小型綠光雷射之研製,”工程科技通訊, 二十一期,1997.. 70.
(71) 附錄 A:證明. L Mp = 2- 2 cos2 cosθ R 2N. 由圖 A1(a)我們可知. l 第 1 點的座標:( d,0 ,- ) 2 l 第 2 點的座標:( d cos φ1 ,d sin φ1 , ) 2 l 第 3 點的座標:( d cos φ 2 ,d sin φ 2 ,- ) 2 由圖 A1(b) 可知 L M 2的球心座標 m 2 : ( 0,0, -R ) 2 r l 2, 1 = ( d (1- cos φ1 ) ,-d sin φ1 ,-l ) r L l l 2, m = (-d cos φ1 ,-d sin φ1 , - -R ) 2 2 r l 2, 3 = ( d cos φ 2 -d cos φ1 ,d sin φ2 -d sin φ1 ,-l ) 2. l i, j為第 i點到第 j 點的向量 光在共振腔行進遵守光 的反射定律 : 1. 入射角=反射角 ∠1,2 ,m 2 = ∠m 2 ,2 ,3 ∴φ 2 = 2φ1 2. 入射線 ,法線 ,反射線在共平面 ∧ ∧ v v L l L l A × B = [ − d sin φ1 ( - -R ) − l ( d sin φ1 )] x + [ld cos φ1 − d (1 − cos φ1 )( - -R )] y + 2 2 2 2 ∧ [ −d 2 sin φ1 (1 − cos φ1 ) − d 2 sin φ1 cos φ1 ] z ∧ v v L l B × C = [ld sin φ1 − ( - -R )( d sin φ 2 − d sin φ 1 )] x + 2 2 ∧ L l [( - -R )( d cos φ 2 − d cos φ1 ) − ld cos φ1 ] y + 2 2 ∧ [ −d cos φ1 ( d sin φ 2 − d sin φ1 ) + d sin φ1 (d cos φ 2 − d cos φ1 )] z. 71.
(72) M2 M1. 3 2. 1. y z x (a) x. M1. M2. 1 2 m1. m2. z 3 L. (b). 1 2. 2φ 1 3. (c) 圖 A1 共振腔中(a)立體圖 (b)側視圖 (c)端視圖 三個方向的光路徑. 72.
(73) v v v v if A × B = B × C 共平面 L l L l 則 − d sinφ1 ( - -R) − l (d sin φ1 ) = ld sinφ1 − ( - -R)(d sinφ2 − d sinφ1 ) 2 2 2 2 Q φ 2 = 2φ1. (A1). ∴ (A1) 式可寫成 L l L l − d sin φ1 ( - -R) − l( d sinφ1 ) = ld sinφ1 − ( - -R)(d sin 2φ1 − d sinφ1 ) 2 2 2 2 ⇒ tan 2. φ1 l = 2 2R − L. (A2). 由圖A1(b) 可知 R 2 = d 2 + [ R − (. L l 2 − )] 2 2. 1 ⇒ ( L − l )2 − R ( L − l ) + d 2 = 0 4. (A3). 由(A3) L − l = 2( R ± R 2 − d 2 ) 取負值 ∴ L = l + 2( R − R 2 − d 2 ) 將(A2)代入則 L = (2 R − L ) tan 2 ⇒. φ1 + 2( R − R2 − d 2 ) 2. L φ = 2 - 2cos2 1 cosθ R 2. 光束在共振腔中行進時 符合reentrant rays 的條件,光由 M 1出發經 M 2反射, 光在xy平面總共轉了2φ1,如圖A1(c),所以光在共振腔完成一個round trip後 回到原點則轉了N ( 2φ1 ),此N (2φ1 )必須滿足2π的整數倍,數學式子是 N ( 2φ1 ) = 2π × M ∴. M 為integer. L Mp = 2 - 2cos2 cosθ R 2N. d 其中θ = sin-1 ( ) R. 73.
(74) 附錄 B:證明 l NM = 2 R sin (. Mp Mp d ) 1 − cos2 ( ) cos2 [sin −1 ( ) ] 2N 2N R. 由圖 A1(a)及附錄 A 我們可以知道 l 第1 點的座標:(d,0 ,- ) 2 l 第 2 點的座標:(d cosφ1,d sin φ1 , ) 2 l 第 3 點的座標:(d cos 2φ1,d sin 2φ1,- ) 2 因為 lNM 代表輸出點數為 N,雷射光在腔內的迴圈數為 M 的系統架. 構中,雷射在輸出耦合透鏡上的光點與下一個在輸入耦合透鏡上的雷射 光點之間的距離,所以第一點座標到第二點的座標可寫成: r l2, 1 = d 2 (1- cosφ1 ) 2 + ( -d sin φ1 ) 2 + l 2 φ1 + l2 2 Q l = L − 2( R − R2 − d 2 ) = 4 d 2 sin 2. (B1). 將l代入式(B1) 中 r φ 可得 l 2,1 = 4d 2 sin 2 1 + [ L − 2( R − R 2 − d 2 )]2 2 = 4d 2 sin 2 = 2 R sin. Mp + [ L − 2 ( R − R 2 − d 2 ) ]2 2N. Mp 2N. sin 2 θ + cos2θ sin 2. Mp 2N. Mp Mp d = 2 R sin ( ) 1 − cos2 ( ) cos2 [sin −1 ( ) ] 2rN R r r 2N 同理 l 2,1 = l 3, 2 = ....................l2N+1, N ∴ l NM = 2 R sin (. Mp Mp d ) 1 − cos2 ( ) cos2 [sin −1 ( ) ] 2N 2N R 74.
(75) 附錄 C: 證明 ∴ LTEM = R + R 2 − 01. 16π 2 d 014 λ2. 對一高斯光束而言,光腰在 z = 0,則其曲率半徑在 z 處為 2. z R ( z ) = z (1 + 02 ) z. ( C1). 因為考慮在鏡心的曲率半徑所以將 z =. L 代入(C1)中 2. 2. L 4z 得 R = (1 + 20 ) 2 L 2R 4z −1 = 0 L L. 2. 2 RL − L2 π 2ω 04 ∴ z0 = = 2 4 λ 2. ∴ω04 = ω0 = 4. L( 2 R − L )λ2 4π 2 L( 2 R − L ) λ2 4π 2. TEM 01 mode的Hermite polynomial 為: H1 ( u ) = 2u 其中 u =. 2 2 x= x ω ( z) ω0. 而TEM 01 mode的Hermite − Gaussian function為下式: G1 ( u ) = H1 (u ) exp(. − u2 ) 2. 2 − x2 =2 x exp( 2 ) ω0 ω0. 75.
(76) 我們為了求得最大強度離光軸的距離,所以 G1 ( u )對x 微分 dG − x2 −2 2 − x2 = exp( 2 ) + 2 x exp( 2 ) dx ω0 ω0 ω0 2x2 ⇒1= 2 ω0. 1 4 L( 2 R − L )λ2 ⇒ 最大強度離光軸的距離 x = 2 4π 2 1 4 L ( 2 R − L ) λ2 2 4π 2. ∴ d 01 =. L ( 2 R − L ) λ2 ( 2d 01 ) = 4π 2 4. 16π 2d 014 = 2 R λ2 L − λ2 L2 π2 ⇒ L − 2 RL + 16 d 2 = 0 λ 2. 4 01. π2 2 R ± ( 2 R ) − 64 d 2 λ ∴L = 2 2. 4 01. 16π 2 d 014 取正值 L = R + R − λ2 2. ∴ LTEM = R + 01. 16π 2 d 014 R − λ2 2. 得證. 76.
(77) 附錄 D:共振腔的穩定性模擬(for Fortran) Program Main implicit none. 變數宣告 integer N,M,k,e,f do 300, N=2,20 do 200, M=1,N-1. if( M .EQ. 1) then call sub1(N,M) goto 200 else end if do 100, k=2,M e=mod(N,k) f=mod(M,k) if(e==0 .and. f==0) then goto 200 else if (k == M ) then call sub1(N,M). end if end if 100 200 300. continue continue continue stop end subroutine sub1(N,M) integer N,M 77.
(78) real. R,d0,cavity_length,l,lNM,d,d_R. real*8 M1(2,2),M2(2,2),M3(2,2),M4(2,2),M12(2,2), M32(2,2), M42(2,2), M1232(2,2),M4232(2,2),Q1(2,2),Q2(2,2),temp(2,2),t(2,2) real*8 s1,s2,w01,w02,w1,n0,nYAG,wh,s1_1,s2_1 open(unit=8050,file='NM8050.txt'). do 500,d0=0.95,5.0,0.05 w1=1.064e-3 R=80 wh=M*180.0/2.0/N. n0=1. !wavelength(mm) !curvature(mm) !degree. !refractive index of the air. nYAG=1.82. !refractive index of Nd:YAG. d=d0/cosd(wh). !mm. d_R=d/R theta=180.0/3.141592654*asin(d/R). !degree. cavity_length=R*(2-2*cosd(wh)**2*cosd(theta)) l=cavity_length-2*(R-sqrt(R**2-d**2)) lNM=sqrt(4*d**2*sind(wh)**2+l**2). M1(1,1)=1 M1(1,2)=lNM/2 M1(2,1)=0 M1(2,2)=1. M2(1,1)=1 M2(1,2)=0 M2(2,1)=-2/R M2(2,2)=1. M3(1,1)=1 M3(1,2)= lNM M3(2,1)=0 M3(2,2)=1 78.
(79) temp(1,1)=1 temp(1,2)=0 temp(2,1)=0 temp(2,2)=1. M4(1,1)=1 M4(1,2)=( lNM +1.0/nYAG-1.0)/2 M4(2,1)=0 M4(2,2)=1. M12=matmul(M1,M2) M32=matmul(M3,M2) M42=matmul(M4,M2). i=1 200. t=matmul(temp,M32) temp=t i=i+1 if (i<=(2*N-1)) then goto 200 else goto 400 end if. 400. M1232=(matmul(M12,temp)) Q1=matmul(M1232,M1). !empty cavity. s1=(Q1(1,1)+Q1(2,2))/2. !calculate the stability. s1_1=1-s1 w01=2*sqrt(w1/(3.141592654*n0))*sqrt(abs(Q1(1,2)))/((1-s1**2) **0.25) M4232=(matmul(M42,temp)) Q2=matmul(M4232,M4) s2=(Q2(1,1)+Q2(2,2))/2. !cavity with Nd:YAG !calculate the stability. s2_1=1-s2. 79.
(80) if (s2<1) then w02=2*sqrt(w1/(3.141592654*n0))*sqrt(abs(Q2(1,2)))/((1-s2**2)**0.25) else write(8050,*)'w02=NAN' end if write(8050,'(1X,I3,1x,I3,1X,F4.2,1X,E12.5,1X,F10.5,1X,E12.5,1X,E12.5, 1X,E12.5,1X,E12.5,1X,E12.5)')N,M,d0,d,cavity_length,d_R,w01, s1_1,w02,s2_1 500. continue write(8050,'(1X,A3,1x,A3,1x,A3,5x,A3,10x,A3,10x,A3,10x,A4,10x,A4,10x,A4, 10x,A4)')'N','M','d0','d','L','d/R','w01','1-s1','w02','1-s2' return end. 80.
數據
![圖 2.3 四面鏡子組成的環形共振腔 光在傳統由三面或四面鏡片所組成的環形共振腔內是以共平面的 八字形或是三角形方式行進,相較一般線型共振腔,環形共振腔的光學 元件較多、體積較大、設計較複雜。直到立體八字形環形共振腔的發現, 打破了傳統雷射環形共振腔必須至少使用三片面鏡的設計。立體八字形 的共振腔是由二片面鏡及一個增益介質組成,如圖 2.4[6]。 圖 2.4 立體八字形環形共振腔 輸入耦合鏡 Nd:YAG 輸出耦合鏡 雷射輸出](https://thumb-ap.123doks.com/thumbv2/9libinfo/8894684.256463/13.894.144.764.132.438/四面鏡子傳統由較一般線振腔使用三片面鏡八字形及一個增益輸出.webp)
+7
Outline
相關文件
• 接下來是光的反射,會讓孩子去玩接光遊戲,體 驗光的反射,並融入簡易萬花筒、潛望鏡、雙面 ( 多面
在 Riemann 映射定理中指出, 任意兩個邊界多於一點的單連通域是全純等價的, 即存在 雙方 單值 (即單葉) 的全純映射, 將一個映為另一個。
The first row shows the eyespot with white inner ring, black middle ring, and yellow outer ring in Bicyclus anynana.. The second row provides the eyespot with black inner ring
The coordinate ring of an affine variety is a domain and a finitely generated k-algebra.. Conversely, a domain which is a finitely generated k-algebra is a coordinate ring of an
The coordinate ring of an affine variety is a domain and a finitely generated k-algebra.. Conversely, a domain which is a finitely generated k-algebra is a coordinate ring of an
同樣的, 將 Theorem 2.6.5 中的 group 換成 ring 及 normal subgroup 換成 ideal, 我們有以下之第三 isomorphism 定理:.. Theorem 6.4.5 (Third
好了既然 Z[x] 中的 ideal 不一定是 principle ideal 那麼我們就不能學 Proposition 7.2.11 的方法得到 Z[x] 中的 irreducible element 就是 prime element 了..
Schematic phase diagram of high-Tc superconductors showing hole doping right side and electron doping left side.. The common Features in
