行政院國家科學委員會專題研究計畫 成果報告
光學系統穩建化設計技術
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 97-2221-E-151-008- 執 行 期 間 : 97 年 08 月 01 日至 98 年 07 月 31 日 執 行 單 位 : 國立高雄應用科技大學機械工程系 計 畫 主 持 人 : 陳昭先 計畫參與人員: 碩士班研究生-兼任助理人員:郭勇助 碩士班研究生-兼任助理人員:李依霖 處 理 方 式 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢中 華 民 國 98 年 10 月 30 日
行政院國家科學委員會 九十七年度研究計畫成果報告
光學系統穩建化設計技術
Robust Design of Optical Systems
計畫編號:NSC 97-2221-E-151 -008 執行期間:97 年 8 月 1 日至 98 年 7 月 31 日 主持人:陳昭先 計畫參與人員:李依霖、郭勇助 國立高雄應用科技大學精密與機械工程研究所
一、計畫導論
成像及非成像光學產品,在我國光電工業佔極重要之產值。前者如使用於數 位像機、手機、投影機、監視器、掃瞄器等之光學鏡頭;後者如兩兆雙星中之平 面顯示器背光模組、LED照明、車燈照明、汽車儀表顯示板等。設計這些光學系 統非常仰賴光學軟體的輔助,著重於成像光學的著名光學軟體有Code V、Zemax、 OSLO;非成像光學則有LightTools、TracePro、ASAP等。這些光學軟體大都以DLS (Damping Least Squared,阻尼最小平方法)方法改進系統結構以求得到更佳光學品質。然而,DLS有若干缺點,只適合求局部解;未提供因子間交互作用資訊;優化 績效函數僅定義成像品質而不考慮公差參數,常會得到標稱品質高但對公差過於 於敏感之結構,而使實際產品良率不佳。此概念可以如圖一表示:橫軸為結構參 數值,緃軸為品質特性,兩條曲線分別為不同之設計。黑色曲線的品質在實作結 構參數值恰為設計值時有極好之品質,但非常敏感,加上公差後品質迅速劣化良 率極差,一般不考慮公差之優化設計常形成此類結構。藍色曲線的最高品質較低 但寬容度高,加上公差之整體品質良率較高,屬於穩建型設計。
圖1.1. 品質特性與結構參數值關係圖。黑色曲線理想值高但穩定度差。 本計畫針對DLS 缺點,應用田口直交表技術於光學設計,以達更有效率及體系之 穩建設計法。
二、研究方法
本計畫主旨為應用田法直交表技術,探索成像及非成像結構因子與系統品質 之關係,並達成穩建化之產品設計。計畫執行期兩年,第一年以田口直交表分析 技術的建立及鏡頭應用為主,包含:(A)構建直交表格及實驗數據分析程式(B)構建 以外部程式控制光學軟體之自動化程式(C)以田口法探索因子效應。 田口設計的工具之一為直交表,每一緃行可於置一個結構參數或結構參數之 交互作用,數字代表該參數設計值(水準)編號;每一橫行代表一個實驗的參數設定 值組合。如圖2.1所示之L27(313)共有13個3水準直行及27種實驗組合。直交表的大小 由實驗參數個數及水準數而定。我們建構了各種直交表及實驗數據分析程式,直 交表包含 (23) 4 L 、 (27) 8 L 、 (34) 9 L 、 (211) 12 L 、 (215) 16 L 、 ' (45) 16 L 、 (21 37) 18 × L 、 (56) 25 L 、 ) 3 ( 13 27 L 、 (231) 32 L 、 ' (21 49) 32 × L 、 (211 312) 36 × L 、 ' (23 313) 36 × L 、 (21 511) 50 × L 、 ) 3 2 ( 1 25 54 × L 、 (263) 64 L 、 ' (421) 64 L 、 (340) 81 L 等,如有進一歩需求,可再建立適當之直交表。 光學系統的結構參數眾多,由於結構參數與水準數組合眾多、計算模擬時間 亦長,需以自動化方式進行。我們採用二種方法,第一種應用電腦語言(Visual Basic)編寫田口直交表程式,透過Winodws系統之標準COM協定,控制光學軟體 Code V改變光學系統之結構參數,計算光學標的並回傳數據,再由後端程式進行 操控及數據分析。第二種方法運用Code V內建之巨集語言直接演算,再將數據傳 至Excel做後端處理,這種方式之速度較快。圖2.2顯示自動化計算結構圖、圖2.3 舉例說明應用Excel控制Code V光學軟體,傳回鏡頭像差,再予繪圖顯示、圖2.4顯 示應用Excel將計算所得數據做後續處理。 No 1 2 3 4 5 6 7 8 9 10 11 12 13 1 1 1 1 1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 2 2 2 2 2 2 2 2 2 3 1 1 1 1 3 3 3 3 3 3 3 3 3 4 1 2 2 2 1 1 1 2 2 2 3 3 3 5 1 2 2 2 2 2 2 3 3 3 1 1 1 6 1 2 2 2 3 3 3 1 1 1 2 2 2 7 1 3 3 3 1 1 1 3 3 3 2 2 2 8 1 3 3 3 2 2 2 1 1 1 3 3 3 9 1 3 3 3 3 3 3 2 2 2 1 1 1 10 2 1 2 3 1 2 3 1 2 3 1 2 3 11 2 1 2 3 2 3 1 2 3 1 2 3 1 12 2 1 2 3 3 1 2 3 1 2 3 1 2 13 2 2 3 1 1 2 3 2 3 1 3 1 2 14 2 2 3 1 2 3 1 3 1 2 1 2 3 15 2 2 3 1 3 1 2 1 2 3 2 3 1 16 2 3 1 2 1 2 3 3 1 2 2 3 1 17 2 3 1 2 2 3 1 1 2 3 3 1 2 18 2 3 1 2 3 1 2 2 3 1 1 2 3 19 3 1 3 2 1 3 2 1 3 2 1 3 2 20 3 1 3 2 2 1 3 2 1 3 2 1 3 21 3 1 3 2 3 2 1 3 2 1 3 2 1 22 3 2 1 1 1 3 2 2 1 3 3 2 1 23 3 2 1 1 2 1 3 3 2 1 1 3 2 24 3 2 1 1 3 2 1 1 3 2 2 1 3 25 3 3 2 3 1 3 2 3 2 1 2 1 3 26 3 3 2 3 2 1 3 1 3 2 3 2 1 27 3 3 2 3 3 2 1 2 1 3 1 3 2 圖2.1. L27(313)直交表。 圖2.2. 自動化計算結構圖。
圖2.3 應用 Excel 控制 Code V 光學軟體,傳回鏡頭像差,再圖列於右下方。 圖2.4 應用Excel將計算所得數據做後續處理。 光學系統於優化設計完成之後,可得到一組滿足工程師指定評價標準之最佳 區域解。接下來是公差分析的部份。光學系統之各零件參數(例如鏡片半徑、厚度、 折射率)在製造時都會偏離設計值,組裝時亦不能完全達設計規格,品質特性也因 此脫離理想設計值。光學工程師必需了解工廠在各種製造組裝上之技術能力,並
保證其設計是可製作的,實作( as-built )成品的品質也符合既定的標準。此種公差 分析有一明顯的缺點。它只分析單項公差之影響,卻無論公差間交互作用的效果。 有時後交互作用的效果會遠大於單項公差之主效果。很可能因忽略了交互作用而 給予單項因子過予寬鬆的公差,導到交互作用極端劣化光學品質而不自知。 適當的編排結構因子於田口直交表的緃行位置,可分析因子間交互作用的效 果。我們以此為基礎,探索光學系統中,一般光學軟體未能提供之因子交互作用。
3. 攝遠鏡頭因子交互作用於MTF影響力之分析
應用田口法可研究分析各類鏡頭。本處茲舉一例,以攝遠專利鏡頭為參考載 具,探討其光學系統及機械組裝公差設計的影響。利用田口直交表配合Code V光 學軟體,探索鏡頭結構因子及因子間交互作用對成像品質的效應及重要性。經由 調整公差,完成具有高性能及低公差靈敏度之穩健化設計。 鏡頭光學結構系統如圖3.1所示。採用田口法中的望小特性,目標值定義為三 個不同視場(0,0.7,1)在空間頻率15lp/mm時之標稱MTF值與加上公差後之MTF 值之差額絕對值,絕對值越小越好。 圖3.1. 攝遠鏡頭結構。3.1. 第一次田口分析
因子及水準值配置。先經由Code V的公差分析找出13個對成像品質(MTF)影響 較大的因子,定義鏡頭公差水準數為3水準[3.1] [3.2],如表3.1所示。其中各類公差 定義為[3.3][3.4]: (1) DLF:面型公差,鏡面曲率半徑與標準原器間之干涉條紋數。 (2) DLT:鏡片厚度公差,為兩個光學面間距誤差,可以是單一零件厚度或者兩零 件間距。 (3) DLN:折射率公差鏡片材質不均勻度的折射率公差。 (4) DSY:組裝上下偏移公差。 (5) BTY:組合傾斜公差,表若干組合鏡面之共同傾斜度。 表3.1. 鏡頭公差及水準數 先不考慮各公差因子間的交互作用,因13 個公差因子之總自由度為 26,採用 L27 直交表分析。鏡頭公差因子在L27 直交表配置如表 3.2 所示。表3.2. 因子 L27 的配置。 直交表實驗數據計算。各視場直交表如表3.3至表3.5所示。在表3.3軸上視場直 交表上,最佳水準組合為A2B3C1D2E2F3G1H1I2J3K3L1M2(實驗次數17);表3.4 之0.7視場直交表上,最佳水準組合為A1B1C1D1E2F2G2H2I2J2K2L2M2與 A1B2C2D2E3F3G3H1I1J1K2L2M2(實驗次數2與6),若以製造與組裝公差考慮以 A1B2C2D2E3F3G3H1I1J1K2L2M2的組合為佳;表3.5全視場直交表上,最佳水準 組合為A1B1C1D1E2F2G2H2I2J2K2L2M2、A1B2C2D2E3F3G3H1I1J1K2L2M2、 A2B3C1D2E2F3G1H1I2J3K3L1M2、A3B2C1D3E2F1G3H3I2J1K1L3M2(實驗次數 2、6、17、23),若以製造與組裝公差考慮以A3B2C1D3E2F1G3H3I2J1K1L3M2較 佳。 表3.3. 軸上視場直交表。 表 3.4. 0.7 視場直交表。 表 3.5. 全視場直交表。
視場回應表。如表3.6至表3.8所示。在表3.6軸上視場回應表上,最佳水準組合 為A2B3C2D1E2F2G2H3I2J2K3L1M2;表3.7之0.7視場回應表上,最佳水準組合為 A1B3C1D1E2F3G3H1I2J2K2L1M2;表3.8全視場回應表上,最佳水準組合 A1B2C1D2E2F3G2H1I2J2K1L1M2。 表3.6. 軸上視場回應表。 表3.7. 0.7 視場回應表。 表3.8. 全視場回應表。 第一次各視場變異數分析。如表3.9至3.11所示。在表3.9變異數分析上,以B、 D、E、M公差因子的貢獻度遠比其他因子大;表3.10變異數分析上,以A、B、L、 M公差因子的貢獻度遠比其他因子大;表3.11變異數分析上,以A、B、L、M公差 因子的貢獻度遠比其他因子大。經由表3.9~11的變異數分析,對貢獻度大的因子結 予較緊的公差,使成像品質更好[3.2]。
表3.9. 軸上視場變異數分析。
表3.10. 0.7 視場變異數分析。
3.2第二次田口分析
經由第一次各視場變異數分析,發現A、B、L、M因子對0.7視場及全視場的 貢獻度比其他的因子大,和軸上視場E因子的貢獻度比其他因子大,故以A,B,E, L,M因子再加上I因子判斷交互作用。 軸上視場的交互作用,如圖3.2~4所示。 20.000 25.000 30.000 35.000 40.000 45.000 50.000 E1 E2 E3 I1 I2 I3 20.000 22.000 24.000 26.000 28.000 30.000 32.000 34.000 36.000 38.000 40.000 E1 E2 E3 L1 L2 L3 圖3.2. EXI 交互作用。 圖 3.3 . EXL 交互作用。 20.000 25.000 30.000 35.000 40.000 45.000 50.000 I1 I2 I3 L1 L2 L3 圖3.4 IXL 交互作用。 0.7視場的交互作用,如圖3.5~7所示。 20.000 25.000 30.000 35.000 40.000 45.000 50.000 55.000 E1 E2 E3 I1 I2 I3 20.000 25.000 30.000 35.000 40.000 45.000 50.000 55.000 E1 E2 E3 L1 L2 L3 圖3.5. EXI 交互作用。 圖 3.6. EXL 交互作用。20.000 25.000 30.000 35.000 40.000 45.000 50.000 I1 I2 I3 L1 L2 L3 圖3.7. IXL 交互作用。 全視場的交互作用,如圖3.8~10所示。 20.000 25.000 30.000 35.000 40.000 45.000 50.000 E1 E2 E3 I1 I2 I3 20.000 25.000 30.000 35.000 40.000 45.000 50.000 E1 E2 E3 L1 L2 L3 圖3.8. EXI 交互作用。 圖 3.9. EXL 交互作用。 20.000 25.000 30.000 35.000 40.000 45.000 50.000 I1 I2 I3 L1 L2 L3 圖3.10. IXL 交互作用。
3.3第三次田口分析
經由第一次田口分析,發現A、B、E、L、M的貢獻度遠比其他因子大及第二 次田口分析,發現EXI、EXL、IXL具有交互作用。所以第三次田口分析以A、B、 E、L、M及EXI、EXL、IXL交互作用再加I公差因子分析。 定義鏡頭公差因子水準數如表3.12所示。且考慮各因子間的交互作用,總自由度為24,故採用L27直交表分析。公差因子的配置如表3.13所示。 表3.12. 鏡頭結構公差及水準數 表3.13. L27 因子配置。 各視場直交表如表3.14至16所示。表3.14軸上視場直交表,最佳水準組合為 A1B2E2I2L1M1(實驗次數13);表3.15之0.7視場直交表,最佳水準組合為 A3B3E1I1L3M3(實驗次數3);表3.16全視場直交表,最佳水準組合為 A2B3E2I2L2M2(實驗次數14)。 表3.14. 軸上視場。 表 3.15. 0.7 視場。 表 3.16. 全視場。
各視場回應表如表3.17~19所示。在表3.17軸上視場回應表上,最佳水準組合 為A3B2E2I2L1M2;表3.18之0.7視場回應表上,最佳水準組合為A3B3E1I1L2M3; 表3.19全視場回應表上,最佳水準組合為A3B1E2I2L2M1。 表3.17. 軸上視場回應表。 表3.18. 0.7 視場回應表。 表3.19. 全視場回應表。 各視場變異數分析如表3.20~22所示。在表3.20軸上視場變異數分析,發現到 EXI的交互作用的貢獻度明顯比主因子的貢獻度大;表3.21之0.7視場變異數分析, 發現EXL的交互作用的貢獻度明顯比主因子的貢獻度大;表3.22全視場變異數分 析,發現EXL的貢獻度明顯比主因子大。 表3.20. 軸上視場變異數分析。
表3.21. 0.7 視場變異數分析。 表3.22. 全視場變異數分析 結論:經由第三次田口法的變異數分析在軸上、0.7、全視場中可以看出因子 間交互作用的貢獻度影響遠大於主要因子之影響,本研究成功找出現有的光學軟 體所無法得到因子間的交互作用。 本部份詳細內容列於李依霖碩士論文[3.5],另刊行於會議論文[3.6]。
4. 厚透鏡三階單色像差之變化演算法
前述範例展現了田口法在已知結構的實際鏡頭之應用。然而,在設計一顆全 新鏡頭或修改已知鏡頭的某些鏡組時,我們需要的是在尚不知具體結構參數值的 情形下,先給予一穩定之起始布局。據此,我們研究出一種新型虛擬厚透鏡組模 型,可精準模擬真實厚透鏡組之初階與三階單色像差特性,在不需給予真實透鏡 結構的情況下直接研究厚鏡組像差隨入射光變化之特性。此虛擬鏡組內部包含三個薄透鏡組,各薄鏡組之光焦度分佈可滿足初階條件,像差分佈則滿足在相同入 射光條件下之系統像差值。當入射光異動時,光線行經每一薄透鏡的高度及角度 也隨之改變,可據此而計算出新的薄透鏡像差,而三個薄透鏡組像差總和即為系 統之新像差值。本虛擬鏡組無使用限制,可直接操作於有限距及無限距共軛、聚 焦及無焦、遠心及非遠心之各類鏡組佈局。後文中將舉出二範例說明本模型之正 確性及像差平衡之應用性。
4.1 導論及演算法
光學鏡頭泛用於各層面,如:矯正視力之眼鏡、開拓視野之望遠鏡,察細知 微之顯微鏡,存影留念之照像機、會議簡報之投影機等。從無到有的鏡頭設計流 程可概分成幾個步驟:一、開立光學規格:如成像尺寸、變焦區段、物距範圍、 F/#、MTF(對比傳遞函數)等。二、高斯光學設計:以近軸公式為基礎,將鏡頭區 分為若干薄透鏡組之組合,分配各鏡組焦距和相對間距。變焦系統則需求解鏡組 滑動軌跡曲線。此階段決定了各鏡組焦距和光線的入出射光路。三、薄透鏡組像 差匹配:鏡頭的三階Seidel單色像差及一階色差為各鏡組像差之總和。當調整物面 及光圈之位置或縮放其尺寸,又或移動鏡間距產生系統變焦,各鏡組會面對不同 之操作光學組態(即入射光條件),像差也必然產生變動。一個不嚴謹的設計會使系 統在某光學組態有良好像質,另一組態則成像拙劣。因此,需為每一鏡組定義其 基準參考組態,慎重地考量鏡組在參考組態之像差值與鏡組操作於其他組態之像 差變化,並使系統在各組態均有穩定的像差平衡及像質。在我們發表的論文中 [4.1],已對薄透鏡組之像差變化提出完整之演算法(圖4.1)。其中在三階單色(Seidel) 像差包含了包含了六項:球差S1、彗差S2、像散S3、場曲S4、畸變S5及瞳球差S6。 每一鏡組在賦予高斯參數及參考組態之像差目標值後,即可視為獨立系統及求解 其結構,再組合成完整的系統初始架構。四、鏡片加厚及系統優化:將每一薄透鏡組予以適當加厚,最後再以優化程式進一歩修改結構以增進像質。優化程式並 非萬能,它只能將原結構之潛力發揮出來,拙劣的初始結構無法得到高品質的優 化成果。 有時工程師需會面對厚透鏡組問題,例如修改現有變焦鏡頭中的某一鏡組, 保持其初階結構但賦予新的像差特性,以增進系統整體像質。這種情況下,需了 解厚透鏡組像差隨入射光組態而改變的方式。知名光學軟體 Code V ®(Optical
Research Associates Inc)採用基於Walther [4.2~4]虛擬光線追跡法之光學鏡組(lens module)來模擬厚透鏡組之初階及像差特性[4.5]。初階參數用以決定近軸入出射光
線的高度與角度之相依性。Code V ®的lens module鏡組初階參數包含厚度、焦距
(MFL)、前焦距 (MFF)及後焦距(MBF)。設定MFF及MBF等同於設定前後主平面位 置。像差方面先設定成像縮小率(MRD)、入瞳位置(MEN)、入瞳直徑(MED)及最大 視場(MFD)四個參數值,再給予對應之六個Seidel像差值。依據以上設定參數,Code V 可計算出任意入射近軸光條件下,鏡組對系統像差之影響力。此功能非常益於
光學鏡頭設計之初始佈局,Park and Shannon [4.6]展現了應用四個lens modules於變
焦鏡頭設計之方法。然而,Code V的方法仍存在若干不便與缺陷:(1) 物體不能在 無限遠或前焦點處,即MRD不能為零或無限大,必需用一極小或極大之值模擬(2) 無法直接用法物方遠心鏡組,因為其入瞳位置及孔徑均為無限大。同樣的必需用 較大數值取代(3)無焦鏡組之焦距及前後焦距均為無限大,此時Code V的 MFL、 MFF及MBF為無效參數,不能正確計算光線出射高度及角度(4) Code V雖能計算鏡 組對系統像差之影響,例如點列圖(Spot diagram)或垂軸像差曲線(Ray aberration curves),但無法直接給出鏡組在特定組態下之像差值,此資訊卻是光學設計時關 注的焦點。
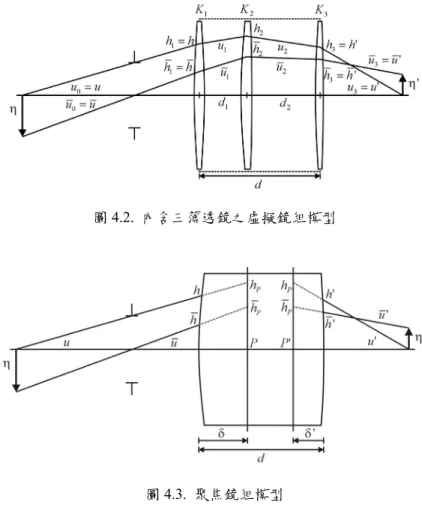
本研究開發出一種別於Code V的新式虛擬厚透鏡組,可完全模擬真實鏡組之 初階與三階單色像差性質。此虛擬厚透鏡組內部包含三個薄透鏡組(圖4.2),各薄鏡
組之光焦度分佈配可滿足初階條件,像差分佈則滿足在相同入射光條件下之系統 像差值。演算流程主要分為三部份。首先,依據鏡組初階特性決定三個薄鏡組之 光焦度分佈。對聚焦鏡組而言,要滿足鏡組厚度d、焦距f、前主平面距δ及後主平 面距δ'。首先直接設定d1和d2值,其個別值並不重要,只要滿足d1+d2=d即可。接著 解出三個薄透鏡組之光焦度為: 1 1 1 ) ' ' ( ) ' ( ' ) ( d K d K d K δδ δ δ δ δ δ δ + − + − − − = , 2 1 2 ) ' ' ( d d K d K = − δ −δ+δδ , 2 2 3 ) ' ' ( ) ' ( ) ' ( d K d K d K δδ δ δ δ δ δ δ + − + − − + = (1) 對無焦鏡組則要滿足鏡組厚度d,零光焦度、角放大率β及基長δa。同樣的先設定 d1+d2=d,再解出三個光焦度。光焦度分佈決定後,依據入射光條件決定其通過每 一薄透鏡及整個厚透鏡組之光路。接著,由參考光學組態之入射光條件及像差值, 求解每一薄透鏡組對應之像差值。此部份在數學上為解一複雜之聯立方程式,詳 細過程將另行發表於國際光學期刊。最後,當入射光改變時,重新計算光路,再 依我們已發表之薄透鏡像差變換公式[4.1]得出三個薄透鏡組之個別新像差,其總和 即為系統之新像差值。 由於入射光高度及角度恆為有限值,不會出現無限大數值之情況,無論是物 在何處、球面或非球面、無焦或有焦、遠心或非遠心鏡組,此演算法都一體適用。 更可貴的是可以直接給予任意入射光條件下之像差值。以上所述Code V模型的種 種缺陷均一併解決。
圖4.1. 薄透鏡組模型,像差隨入射邊緣光及主光線之高度及角度而變
圖4.2. 內含三薄透鏡之虛擬鏡組模型
圖4.4. 無焦鏡組模型
4.2 範例
本處列舉二範例說明此模型之正確性及在像差平衡之應用。範例一。圖4.5為 一適用於數位攝影機之四百萬畫素大孔徑十倍變焦鏡頭。此鏡頭由四鏡組構成。 其中第二鏡組包含非球面,鏡組結構及初階參數繪於圖4.6,其在二個光學組態之 像差值則列於表4.1。 圖4.5. 變焦鏡頭及二個組態 圖 4.6. 第二鏡組結構及參數值。 首先求符合初階目標值之三薄透鏡焦度,先令虛擬鏡組之d1=d2=d/2 = 6.175,再由公式(1)得到三個薄透鏡組之光焦度分別為K1=-0.0967946 (f1=-10.33)、 = 2 K 0.0337796 (f2 =29.60)及K3= -0.0349487 (f3=-28.61)。令組態一為參考組態, 由演算法得到相關的三個薄透鏡組像差值及總和如表4.2所列,最後一欄顯示像差總和與真實透鏡有相同之值。接著,由組態二之入射條件,計算光線行經每一薄 透鏡之高度及角度,應用薄透鏡像差變換公式[4.1]計算薄透鏡個別新像差及總和, 列於表4.3。比較最後一欄與表4.1第三欄,可知本模型所預期之像差與真實透鏡之 像差完全相同。 第二範例展示如何應用此演算法來最佳化變焦系統在參考組態之像差設定 值。圖4.7為由雙厚透鏡組構成之有限距變焦系統,物像總長120mm、像高5 mm、 光圈直徑5mm且固定於第一鏡組前端、二光學組態放大率分別為-1及-0.5。假設兩 個鏡組具有相同結構,初階參數為f=30、d=20、δ=5及δ'=-5。間距d0、 d1、d2可 由典型變焦公式[4.7]求得。令第一鏡組在第一組態之入射光條件為參考組態,則此 時之像差值應設為多少才能使系統有最好之平均成像品質? 表4.1. 圖 4.6 鏡組於二個光學組態之像差。 像差 光學組態1 光學組態2 S1 -0.000957597 -0.00966773 S2 -0.00249863 0.0117646 S3 -0.01697 -0.0381275 S4 -0.0649725 -0.0268528 S5 0.825262 0.0777384 S6 -3.33372 -0.0504529
表4.2. 虛擬鏡組於光學組態 1 之像差匹配及總合。 光學組態1 像差 薄透鏡1 薄透鏡2 薄透鏡3 總和 S1 -0.0492801 0.0354194 0.012903 -0.000957597 S2 0.212744 -0.186858 -0.0283845 -0.00249863 S3 -0.94929 0.906796 0.0255241 -0.01697 S4 -0.0641971 0.0224036 -0.023179 -0.0649725 S5 4.91637 -4.24838 0.157265 0.825262 S6 -20.8966 18.1576 -0.594723 -3.33372 表4.3. 虛擬鏡組於光學組態 2 之像差匹配及總和。 光學組態2 像差係數 薄透鏡1 薄透鏡2 薄透鏡3 總和 S1 -0.6412 0.557713 0.0738188 -0.00966773 S2 0.353158 -0.348427 0.00703281 0.0117646 S3 -0.216616 0.195384 -0.016895 -0.0381275 S4 -0.0265324 0.00925931 -0.00957978 -0.0268528 S5 0.178304 -0.105298 0.00473277 0.0777384 S6 -0.0975257 0.0475357 -0.00046284 -0.0504529 在没有其他資訊下,我們通常先令參考組態之S1至S6均為零,如表4.4 第二欄所 示。應用本文演算法可得其他組態像差及系統之優化函數值(= 2.24)。利用優化程 式,可優化參考組態之像差值,得到表4.5 第欄。可看出優化前後,優化函數值從 2.24 大幅下降約五倍至 0.4,二個組態之畸變則從 0.19% 及 -1.21% 分別縮小至 0.1% 及-0.1%。無論聚焦點品質及影像變形量均獲大幅改善。
圖4.7. 有限距變焦系統架構。 表4.4. 圖 4.7 變焦系統於優化前之像差、畸變及優化函數值。 光學組態1 光學組態2 像差係數 鏡組1 鏡組2 總和 鏡組1 鏡組2 總和 S1 0 -0.00561600 -0.00561600 -0.00040008 -0.00159383 -0.00199392 S2 0 -0.00999200 -0.00999200 0.00170579 -0.00379657 -0.00209078 S3 0 -0.01332622 -0.01332622 0.00146975 -0.00451043 -0.00304068 S4 0 0 0 0 0 0 S5 0 -0.00190726 -0.00190726 0 0.01168768 0.01168768 S6 0 -0.00169534 -0.00169534 0 0.00165441 0.00165441 畸變 - - 0.19% - - -1.21% 優化函數值 = 2.24284 表4.5. 圖 4.7 變焦系統於優化後之像差、畸變及優化函數值。 光學組態1 光學組態2 像差係數 鏡組1 鏡組2 總和 鏡組1 鏡組2 總和 S1 0 0.00205808 0.00205808 0.00033237 0.00358955 0.00392192 S2 -0.00160262 -0.00144285 -0.00304546 0.00082626 -0.00157007 -0.00074381 S3 -0.00453659 -0.00231733 -0.00685391 0.00515546 -0.00446792 0.00068754 S4 -0.00181356 -0.00181356 -0.00362711 -0.00168293 -0.00168293 -0.00336587 S5 -0.01641455 0.01541455 -0.001 -0.01467346 0.01563678 0.00096331 S6 0 0.02979534 0.02979534 0 0.00397591 0.00397591 畸變 - - 0.1% - - -0.1% 優化函數值 = 0.408987
4.3 結論
本研究揭櫫新型虛擬厚透鏡組模型,可在不需知導實際鏡片結構參數下,精 準計算出真實厚透鏡組之初階與三階單色像差特性。本模型無使用限制,一體適 用於有限距及無限距共軛、聚焦及無焦、遠心及非遠心之各類鏡組,並且可直接 給予任意入射光條件下之厚透鏡組像差值。目前尚無任何光學成像軟體,如Code V、Zemax、Oslo等,可提供與本模型等效之功能。文中舉出二範例說明本模型之 正確性及像差平衡之應用性。本研究詳文投稿於Journal of Modern Optics期刊,已獲接受,即將刊行[4.8]。
五、計畫成果
本年度計劃已按進度執行,計劃結案如期完成。除原定計劃內容,對於第二 年將執行之各類像差演算法也已提早執行。此外我們增加研究了虛擬厚透鏡之像 差演算法,已通過 SCI期刊 Journal of Modern Optics 審核並即將刊行[4.8]。本年 工作成果將成為下年度已核定計畫之碁石。 對於參與工作之碩士生員,也獲得以下訓練。 1. 學習成像光學鏡頭基礎知識以及應用技術。 2. 學習田口穩建設計技術,編寫相關直交表及統計分析程式。 3. 學習Code V光學軟體之操作及應用。 4. 學習透過COM介面控制光學軟體之技術。
六、參考文獻
[3.1] 鹫尾俊原著、盧淵源校正、蔡明三編譯,” 實驗計畫法(修訂版)”,華泰。[3.2] 陳信宏教授、周志宏教授,”品質工程講義”。 [3.3] 鄭均安,”雙高斯鏡頭穩健化設計”,國立高雄應用科技大學,機械與精密工 程研究所,碩士論文,民國96 年。 [3.4] 林裕勛,”手機相機模組之容差分析”,國立台北科技大學,機械工程系,碩 士論文,民國94 年。 [3.5] 李依霖,”Telephoto-穩健化設計”, 國立高雄應用科技大學,機械與精密工程 研究所,碩士論文,民國98 年。 [3.6] 李依霖、陳昭先” Telephoto-穩健化設計”, 2009 資訊科技國際研討會。 [4.1] Chen, C.H. J. Mod. Opt. 2008, 55, 105-126.
[4.2] Walther. A. J. Opt. Soc. Am. 1969, 59, 1325-1333. [4.3] Walther. A. J. Opt. Soc. Am. 1970, 60, 918-920. [4.4] Walther A. Proc. SPIE 1985, 554, 351-355.
[4.5] Kuper, T.; Rimmer, M. Proc. SPIE 1988, 892, 140-151. [4.6] Park, S.C. Opt. Eng. 1996, 35, 1668-1676.
[4.7] Smith, W.J. Modern Optical Engineering; McGraw-Hill: New York, 1991. [4.8] Chen, C.H., “Modeling the first- and third-order properties of conceptual thick




![表 3.21. 0.7 視場變異數分析。 表 3.22. 全視場變異數分析 結論:經由第三次田口法的變異數分析在軸上、0.7、全視場中可以看出因子 間交互作用的貢獻度影響遠大於主要因子之影響,本研究成功找出現有的光學軟 體所無法得到因子間的交互作用。 本部份詳細內容列於李依霖碩士論文[3.5],另刊行於會議論文[3.6]。 4](https://thumb-ap.123doks.com/thumbv2/9libinfo/8830723.235172/15.892.269.625.206.668/全視場三次田口法出因子間交互作用貢獻度影響遠因子因子間容列.webp)